The identification of the key nodes of the mobile UUV formation is to establish the network topology of the mobile formation by analyzing spatiotemporal trajectories in order to further rank the importance of the nodes by the key node identification algorithm. Therefore, this section sets up the simulation experiments and the lake experiments to verify the efficiency of the proposed algorithm.
4.1. Simulation and Experiments Analysis
In order to verify the effectiveness of the key node identification algorithm based on the entropy of the network structure, this section uses Matlab
© to perform the simulation experiments. Based on the leader–follower formation control model, we considered one leader and seven followers to navigate a “U” trajectory in a triangular formation to verify the discrimination effect of the algorithm. In this simulation, the distance matrix
and delay matrix
are set as follows. (In the matrix
, the element 0 indicates that the two nodes are not directly related and have no real physical significance):
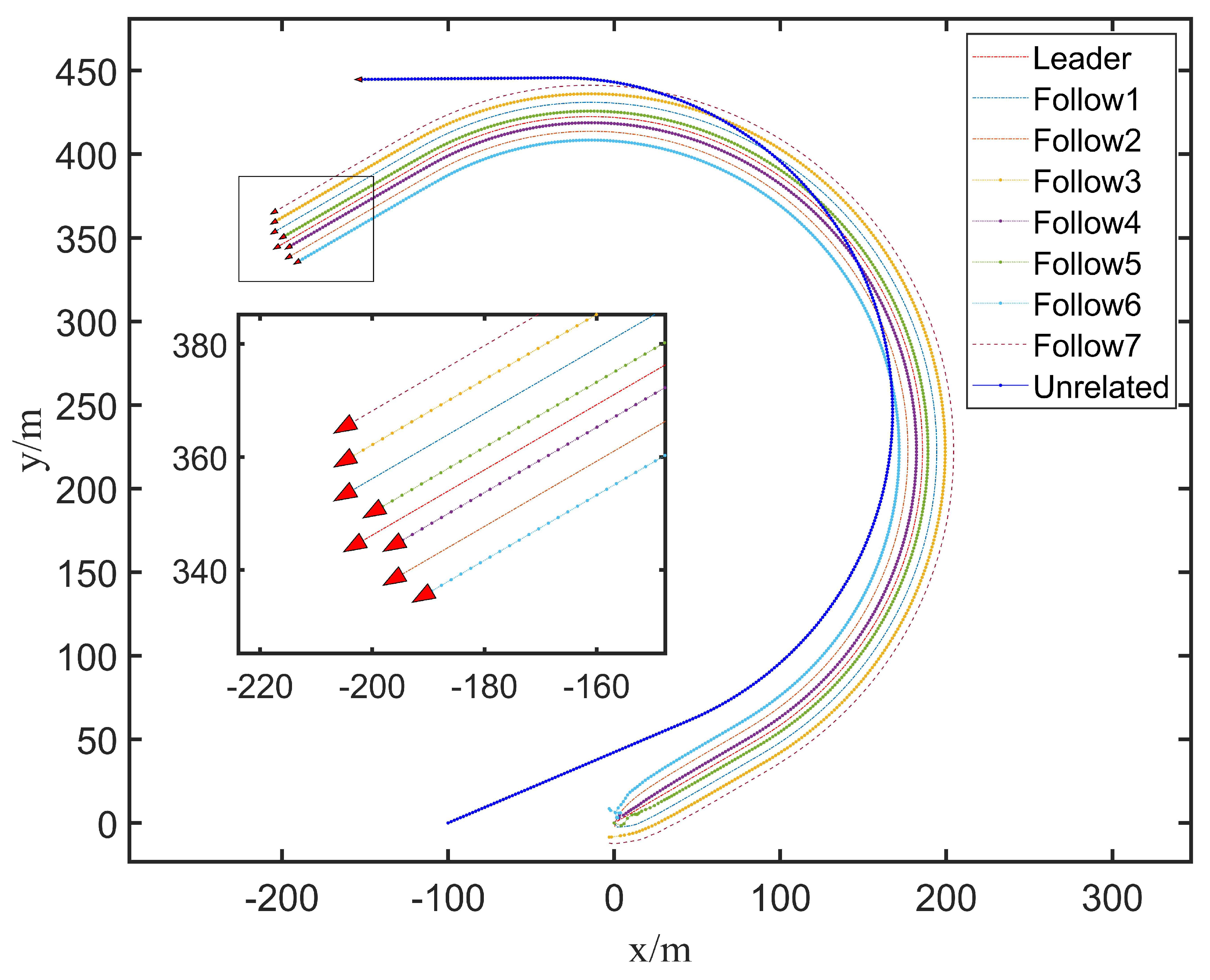
In addition, we added the trajectory of an unrelated UUV to the formation in the simulation to compare and judge the effects of this additional feature. Therefore, the simulation results are displayed in
Figure 3.
Figure 3 shows that the follower trajectories the leader well at a predetermined angle and distance based on the influence of the controller. Then, a pairwise analysis was performed on the spatiotemporal trajectories of all UUVs using the aforementioned motion similarity model. The delay matrix and the motion correlation coefficient (refer to
Table 1) of the UUV formation are calculated as follows:
By comparing the time delay matrix and , the accuracy of the time delay data obtained by the algorithm was 84.6%, and in addition, the erroneous time delay data did not appear between nodes with the direct leader–follower relationships, and the erroneous data did not affect the accuracy of the subsequent reconstruction of the formation network structure. Based on the above delay matrix, the time delay between UUVs with a leader–following relationship represents an antisymmetric transfer, and the positive and negative delays indicate whether the UUV is following or being followed. Moreover, these values also specified the delay time for the follower to receive the leader’s movement information and take action, which is in line with the law of following a relationship. When the time delay was null, it means that there was no leader–following relationship between the paired UUVs.
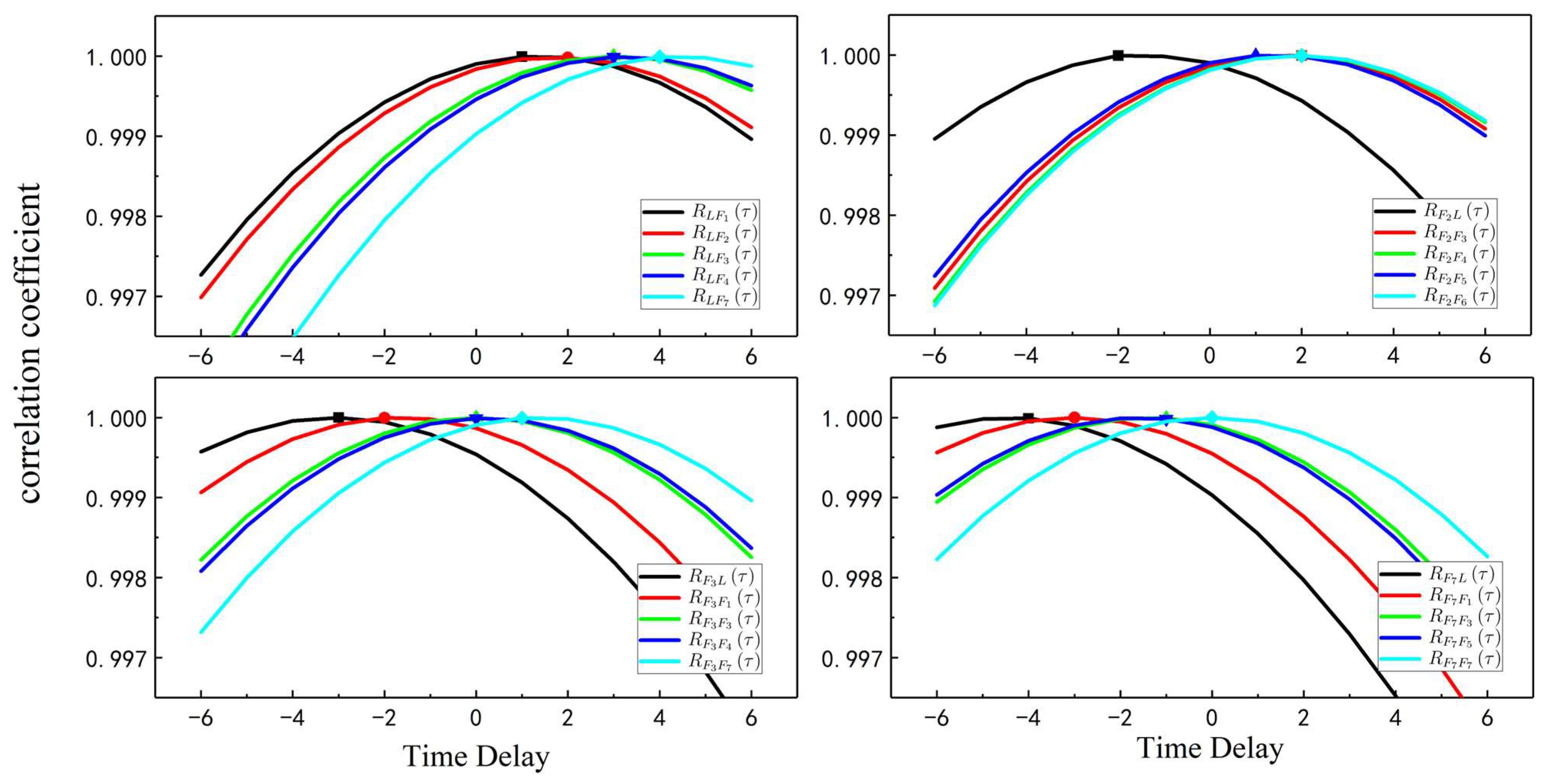
Referring to
Table 1, the correlation coefficient corresponds to the time delay, and the motion correlation coefficient between the UUVs is varying at different time delays, as shown in
Figure 4. Since the leader following the model does not introduce errors, such as propulsion, hydroacoustic delay, and complex environmental interference, the motion correlation coefficient between each UUV at the corresponding delay time was very large; however, when being compared to the motion correlation coefficient of the unrelated-UUV, there was a significant gap, and the unrelated UUV’s motion correlation coefficient was much smaller than others. Setting the threshold value
, and as
, the correlation coefficient of the motion of the unrelated UUV and any other UUV was less than the threshold; therefore, it is considered that the unrelated UUV does not have a leader–follower relationship with any other UUV.
Referring to the matrix Equation (23), and according to the size of the delay, the leader–following relationship of UUVs between pairs was judged, and it was sorted according to the leader–follower level, and the following points were calculated: all followers had a following relationship for the leader, whereas Follow1 and Follow2 had a leadership relationship for the remaining UUVs, and Follow3, Follow4, Follow5, and Follow6 had a leadership relationship for Follow7.
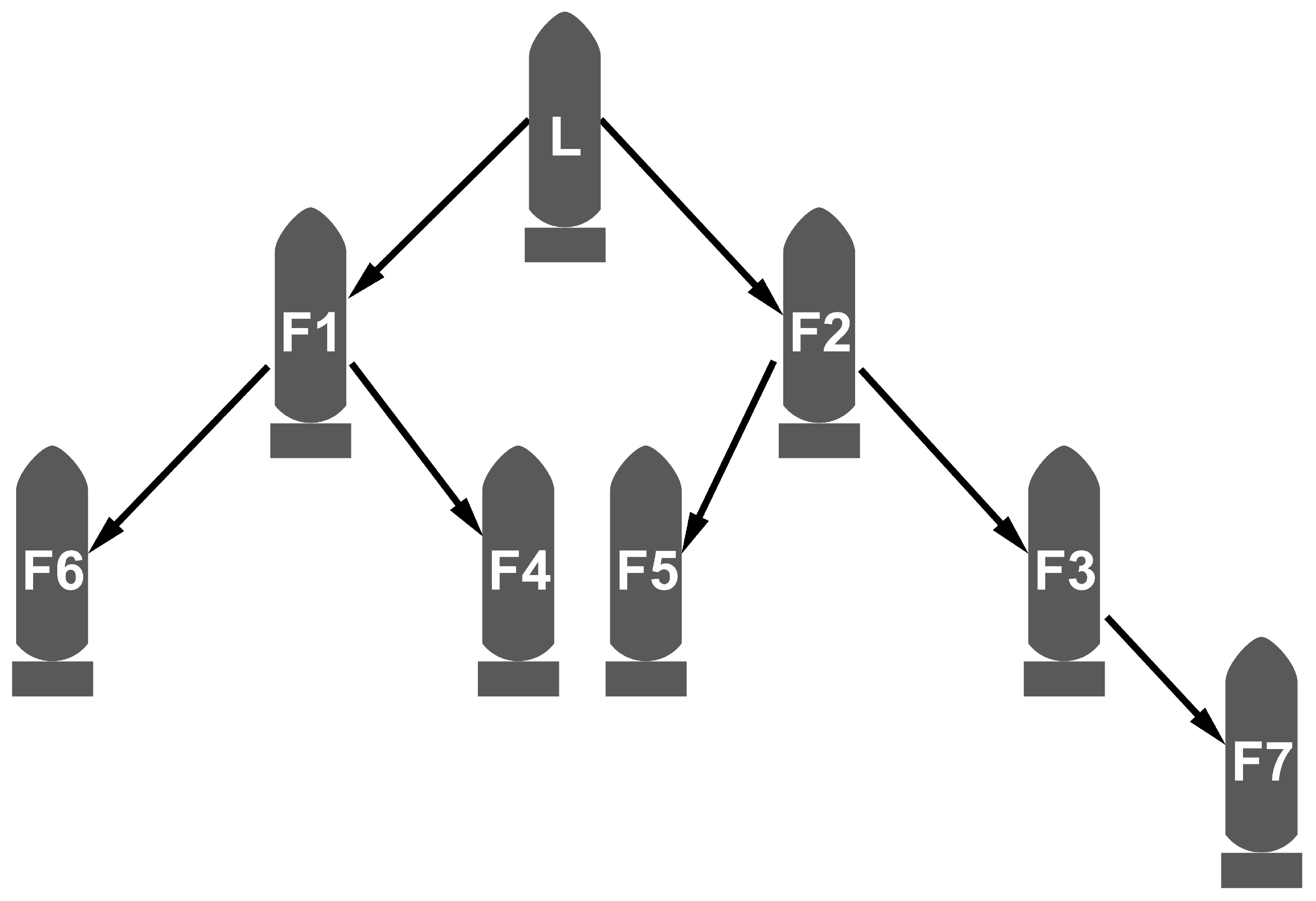
Therefore, the formation network hierarchy was obtained: the UUV leader belonged to the first level, Follow1, Follow2 were part of the second level, Follow3, Follow4, Follow5, and Follow6 belonged to the third level, and, finally, Follow7 belonged to the fourth level. The network relationship, obtained through the above analysis, was still relatively complex where one UUV had a following relationship with multiple UUVs at the same time. Considering the communication restrictions of the underwater formation, etc., it was considered to have a following relationship with the nearest vehicle. Through the analysis of the network again using this rule, the network structure of the formation can be obtained, as shown in
Figure 5.
Therefore, the collar matrix
of the formation network was obtained as follows, and, when being combined with the behavioral correlation coefficient matrix, it was brought into the established node edge weight coefficient model; hence, the weight coefficient matrix
of the formation network can be expressed as follows:
According to the formation network structure and its corresponding collar relationship and weight coefficient matrices, the node importance is calculated by using the network structure entropy model. Firstly, according to the adjacency and the weight matrices of the network, the input intensity value
and the output intensity value
of each node are calculated. Moreover, according to Equation (17), the comprehensive strength value of each node is calculated to get
Table 2.
Then, also taking
, according to Equation (18), the comprehensive adjacency strength value q of the node is calculated as shown in
Table 3.
Finally, according to Equation (21), the entropy of each network structure is calculated, and the following results are presented in
Table 4.
Based on the entropy of the network structure calculated above, the followers can be arranged using the following order: Follow2 > Follow1 > Leader > Follow3 > Follow5 > Follow4 = Follow6 > Follow7. According to the network structure, the relevance of the Follow1 and Follow2 nodes was higher, since Follow1 and Follow2 regulated information relative to the input and output flows. Moreover, Follow3 controlled Follow7; therefore, it was more critical than other followers of the same level. Finally, Follow4, Follow5, and Follow6 were all considered as edge nodes of the formation network; thus, their information entropy was basically the same, and this was conforming to the network structure law.
By using the traditional information entropy algorithm [
24], the information entropy of each node under the network result was calculated as shown in
Table 5.
In the above table, the order of the information entropy of the nodes is: Follower1 > Follower2 > Follower3 > Leader > Follower5 > Follower4 = Follower6 > Follower7, but we believe that the node leader was more important than the node Follower3, and the node Follower2 was more important than the node Follower1. Compared with the network structure entropy results in
Table 4, it can be obtained that the improved algorithm in this paper was more in line with the actual situation in ordering the important nodes of the underwater network structure than the traditional information entropy algorithm.
4.2. Lake Experiments and Analysis
In order to verify the effectiveness of critical node identification of the multi-UUV formation algorithm proposed in this paper, the lake formation experiment was carried out, and the real dead reckoning data were obtained to place the detection of UUV formations. Therefore, three vehicles set up the trajectory of vehicles, not linked to the formation navigation, while sailing in linear and triangular formations on the Qiandao Lake in Hangzhou City as the test location in order to confirm that the algorithm can successfully recognize different network structures.
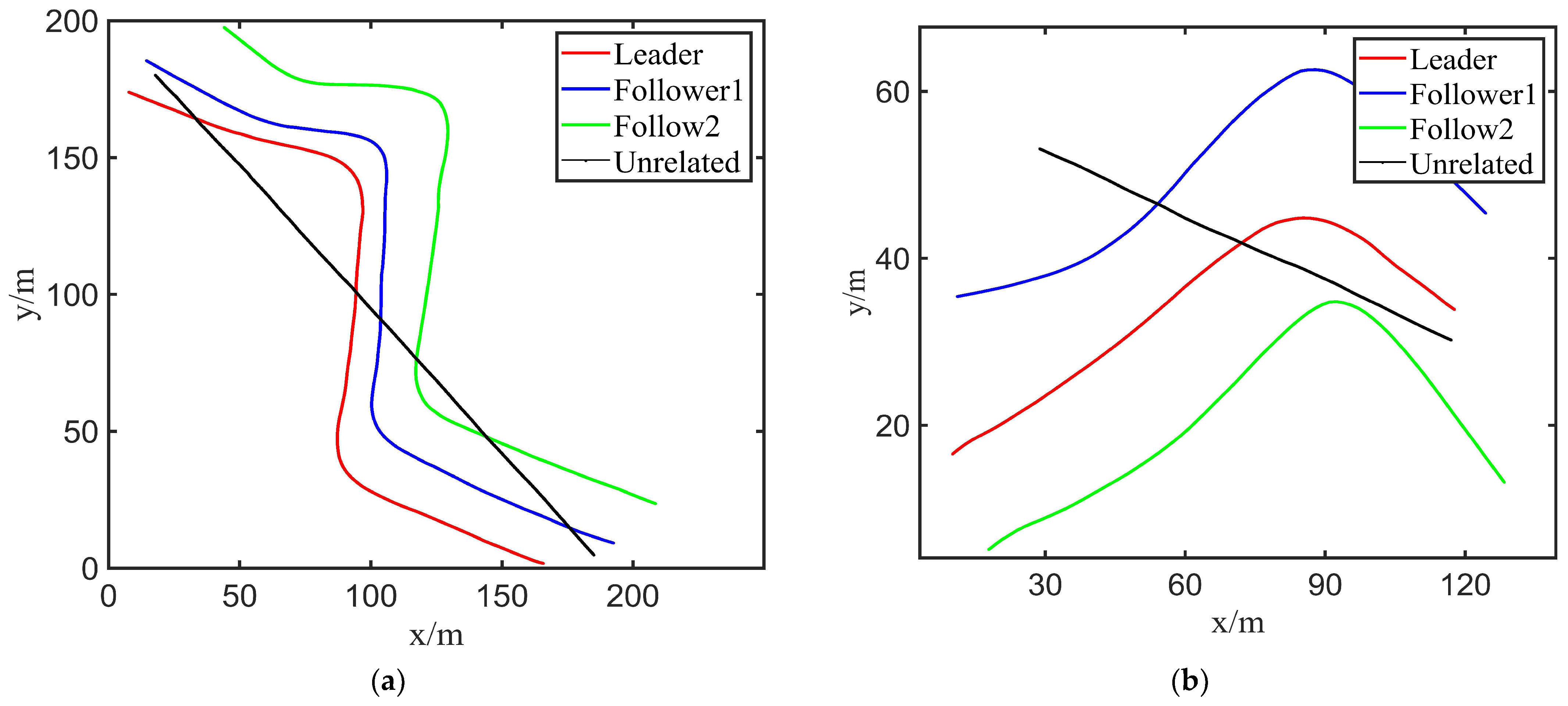
Figure 6a shows the experiment platform and
Figure 6b shows UUV formation sailing on the water. Two sets of trajectory points recorded by the UUV itself are shown in
Figure 7:
Referring to the paths of
Figure 7, the follower has several degrees of error with respect to the leader’s trajectory, but the trajectory it follows has generally the same shape. The space–time UUV trajectories were substituted every two pairs with the motion similarity model to obtain the following motion correlation coefficient (refer to Equation (25)) and time delay tables (refer to
Table 6 and
Table 7):
In the above motion correlation coefficients table, the average motion similarity between the leaders and the followers was high; however, the motion similarity coefficients of spatiotemporal trajectories of unrelated UUV and other UUVs were quite different compared to others. Setting the threshold
, the similarity coefficient of the motion between the unrelated UUV and any other UUV was below the threshold; therefore, it is considered that there is no leader–follower relationship with any other UUV.
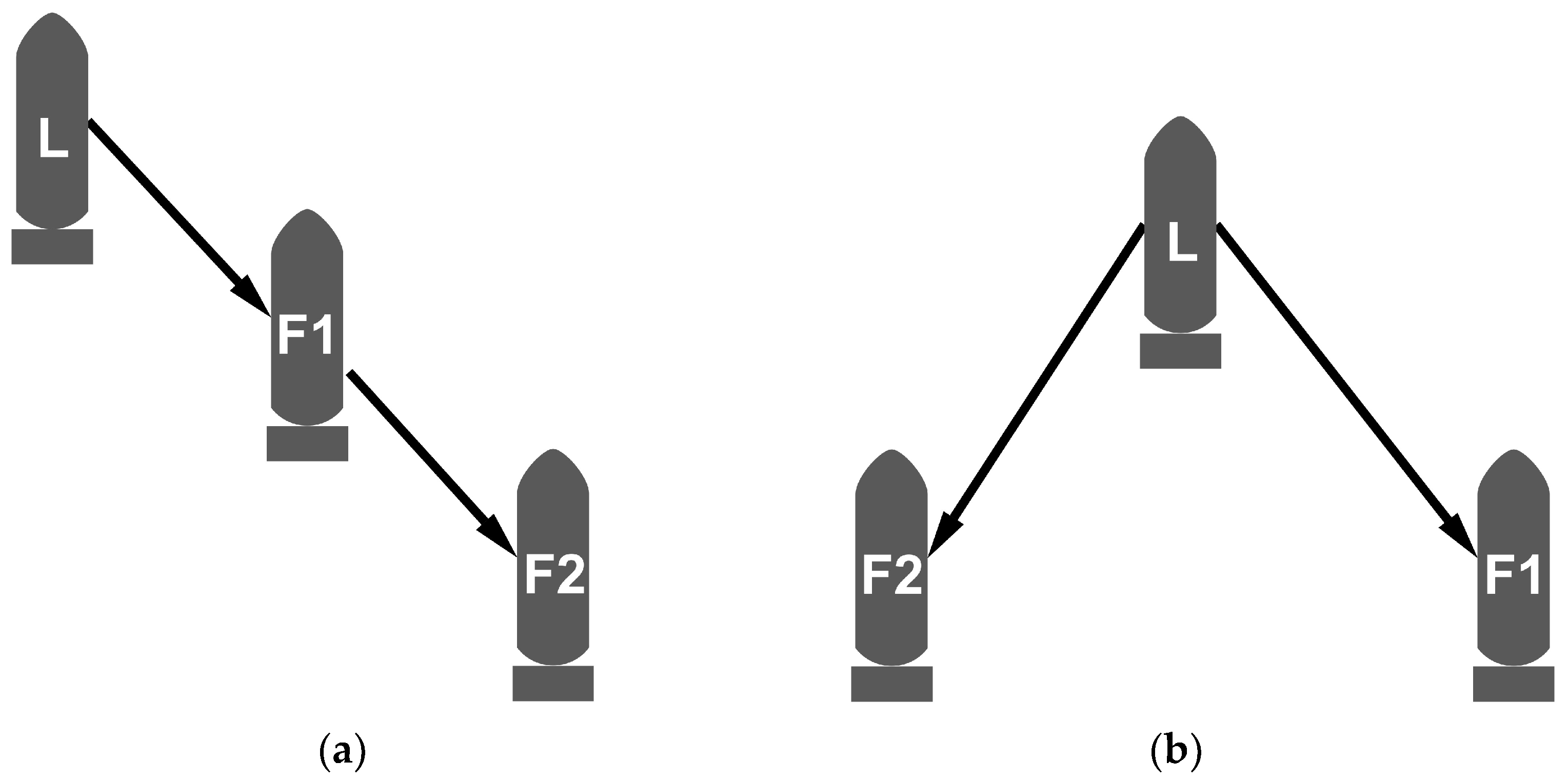
In the above time delay matrix, when the formation was carried out in a liner shape, if the UUV leader is the leader, the time delay between it and Follow1 and Follow2 is greater than zero. However, when Follow1 was the leader, the time delay between it and the UUV leader was less than zero, and the time delay with Follow2 was greater than zero. Therefore, the UUV leader had the leadership relationships for Follow1 and Follow2, and Follow1 also had leadership relationships for Follow2, which resulted in the structural relationship shown in
Figure 8a. When moving in a triangle, the UUV leader had a leadership relationship with Follow1 and Follow2. Regardless of whether Follow1 or Follow2 were leaders or followers, the time delay between them was equal to zero, that is, there was no leader–following relationship, belonging to the same level, and the structural relationship, shown in
Figure 8b, can be obtained, which was in line with the experimental setting.
Thus, the adjacency matrix
and
of the formation network was obtained:
In this experiment, the distances between the vehicles were all the same, and, combined with the motion similarity coefficient, the weight matrices under the two formations can be obtained:
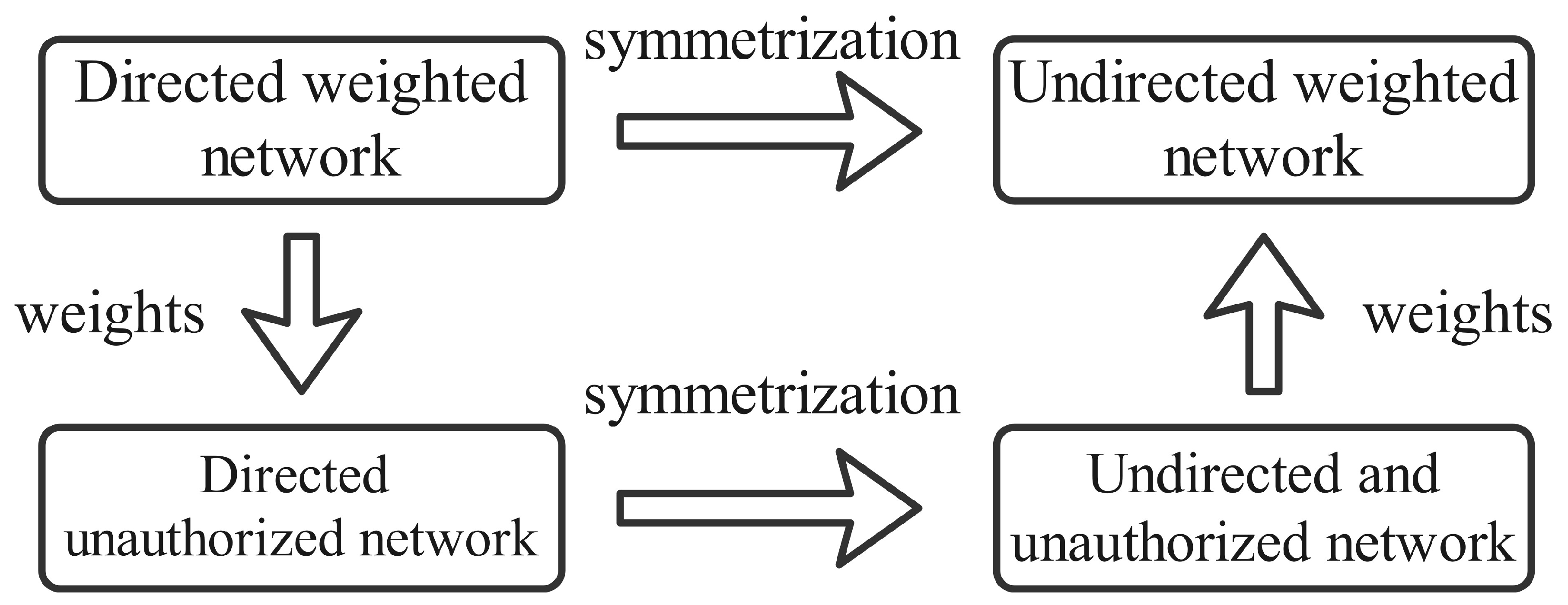
According to the weight coefficient matrix, we found out that the difference between the weight coefficients was very small, so the directed weightless network structure entropy algorithm was applied to calculate the importance between the nodes.
According to the Equation (17), the comprehensive strength value of each node in both networks is calculated to get
Table 8 and
Table 9.
Then, also taking
, according to the Equation (18), the comprehensive adjacency strength value of the node in both networks was calculated as shown in
Table 10 and
Table 11.
Finally, according to Equation (21), the entropy of each network structure was calculated, and the following results of both networks are presented in
Table 12 and
Table 13.
According to the node network structure entropy obtained in the above tables, the size of the entropy of each node was ordered, in the liner shape formation, as Follow1 was responsible for connecting the UUV leader and Follow2 in the middle position of the line shape; therefore, this position was more critical, and the UUV leader was responsible for piloting and sending data, so its importance was greater than that of Follow2.
As for the triangular formation, the UUV leader was responsible for connecting Follow1 and Follow2, and it was also responsible for calculating and sending the route data, which was more critical than the other two; moreover, the other two followers had the same position, the same role, and the same importance.
In this paper, the trajectory used was recorded by the aircraft itself. The experiment in this paper was mainly to prove that under a series of continuous spatiotemporal trajectories, the algorithm of this paper can be used to reconstruct the network structure of unknown formations and effectively rank the importance of nodes. However, in real situations, the results obtained when observing the formation’s trajectory through sonar equipment or other methods will not be so dense, and the results obtained due to sensor interference will be biased. It is possible to consider adding an error model and using a filtering algorithm to process the tracks detected by the sonar.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}