1. Introduction
In large-scale offshore projects moving towards deeper waters, e.g., oil and gas exploitation, the Revolving Floating Crane (RFC) is increasingly becoming the core equipment for offshore operations. The physical system of an RFC is illustrated in
Figure 1, in which the upper deck is equipped with a fully revolving crane and the lower hull is equipped with a ballast water-allocation system. As seen, the RFC is susceptible to heeling or capsizing due to moment unbalance during offshore lifting, particularly in revolving operations with heavy crane loads. To mitigate these risks, ballast water is strategically allocated opposite to the load, counteracting capsizing moments and ensuring safe lifting operations. Thus, maintaining reasonable trim and heel angles during lifts is crucial for the stability, load distribution, personnel safety, and equipment performance of the RFC.
Essentially, ballast water allocation involves adjusting the distribution of ballast water within the ballast tanks of the vessel to ensure that the heel and trim angles of the vessel meet the relevant safety regulations during offshore operations. Currently, ballast water-allocation operations are generally carried out manually by relevant technical personnel, which can easily be influenced by factors such as personnel experience, sea conditions, and weather conditions, resulting in low operational efficiency, high energy consumption, and poor safety. Therefore, the intelligentization of the ballasting process for RFC is an effective solution to address the aforementioned issues, and the key is a reliable and efficient optimization method of ballast water allocation for RFCs. Due to the high-frequency allocation of large amounts of ballast water involved in offshore operations, particularly compared to other types of vessels, careful considerations of ballast water allocation should be taken for the RFC.
Currently, with the development of RFCs towards larger and smarter vessels, research on the optimization design of ballast water allocation has been on the rise. Liu et al. [
1] proposed a solution strategy based on dynamic programming for the ballast water-allocation problem and their results showed that the optimal allocation plan outperforms traditional methods in terms of the total allocation volume and the ballasting time. Jiang et al. [
2] established an optimization scheme for ballast water allocation by combining ballast pumps and a gravity-based self-flow ballast system. Simulation results demonstrated that the proposed optimization scheme can effectively reduce the ballasting time. Long [
3] introduced an improved genetic algorithm to optimize the allocation of ballast water in barges, with results indicating that the improved genetic algorithm has a shorter computation time and higher efficiency. Liu et al. [
4] proposed an optimization scheme based on the fuzzy particle swarm optimization algorithm for the ballast-allocation problem, and their comparative results demonstrated the advantages of this method in terms of efficiency improvement, reduced computation time, and good applicability. Topalov et al. [
5] developed an information system for the real-time acquisition of the operational parameters of the ballast system, and the research results confirmed the effectiveness of this information system for realizing the automatic allocation of ballast water. Wang et al. [
6] proposed an optimization method based on the dynamic programming algorithm for the ballast process of underwater rescue robots, established and solved the optimization model with the minimum ballast time as the optimization objective, and verified the feasibility of the optimization results by using the simulation results. Adi et al. [
7] divided the lifting processes into several stages and employed a multi-objective evolutionary algorithm to determine the optimal ballast-allocation scheme for each stage, with numerical simulation results finding that the obtained allocation scheme can significantly improve the ballast efficiency compared with traditional approaches. Low et al. [
8] put forward a modular design-optimization method for the ballast water-allocation process of large container ships, and actual tests demonstrated that the established method can achieve stable ballast water allocation, reduce ballast water-allocation volume, and lower shipping costs. Guo et al. [
9] built an integrated scheduling model (ISM) to optimize the ballast operations of RFC. Experiments showed that the established ISM is of great help to improve the offshore lifting efficiency. Zhu et al. [
10] developed a new ballast strategy using a global optimization approach and found that the proposed approach can enhance existing analytical workflows and help engineers make informed decisions. Chen et al. [
11] adopted the multi-objective genetic algorithm (MOGA) to optimize large-scale ballast water allocation and verified the effectiveness of the proposed method through practical engineering cases.
A lot of the literature has focused on the intelligent allocation of ballast water. Manzi et al. [
12] designed a ballast system with a human–computer interaction interface on the basis of the original ballast system to improve the ballast efficiency. Samyn et al. [
13] established a six-free-degree dynamic ballast water-control system for a semi-submersible platform by taking into account the effects of ballast tank weight, inertia, and moment. Woods et al. [
14] designed two sets of unique variable ballast devices to realize the automatic allocation of the ballast water for controling the launching depth, center of gravity, and inclination angle of the Autonomous Underwater Vehicle (AUV). Jesse et al. [
15] proposed a Proportional Integral Derivative (PID) control system that can realize the free flow of seawater into and out of an AUV ballast tank for the semi-submersible barge under normal and dangerous conditions. Liu et al. [
16] proposed a generalized predictive controller with a forgetting factor recursive least square for the ballast system, and experimental results showed that the automatic control of the ballast system has been improved to some degree. Salomaa [
17] designed and developed an automatic control system for the ballast system of a micro-naval robot for autonomously changing the remaining volume of the ballast tank, and the corresponding reliability is certified by an analytical experiment. Li et al. [
18] adopted the variable universe fuzzy S surface-control method to achieve the on-line setting of the control parameters of the ballast water system according to the relevant theories and experience, with experiment results finding that the on-line control effects of this system are robust enough to handle the flow disturbance.
Based on the analysis above, certain work has been performed on the design optimization of the ballast water allocation for the RFC. However, in certain studies, the optimization problem related to ballast water allocation is at times framed as a multi-stage planning challenge. This approach may bring about challenges, including potential discontinuities in solutions, reduced solution efficiency, and noticeable solution errors. These challenges, to a certain extent, may lead to formulated ballast water-allocation plans deviating from actual operational processes, potentially failing to meet the intelligent operational standards of the RFC. To address these issues, this paper proposes an optimization method for ballast water allocation for the RFC based on the Point-to-Point (PTP) theory, which is efficient and capable of providing continuous solutions. Furthermore, the proposed method can also be extended to enable intelligent and automated ballast water-allocation for other types of equipment in maritime navigation and offshore operations.
The remainder of this paper is organized as follows.
Section 2 develops the PTP-based optimization method of ballast water allocation for the RFC.
Section 3 establishes the optimization model of the PTP-based method of ballast water allocation to maximize the ballasting performance. In
Section 4, a case study of the proposed method is performed and the corresponding superiority is certified by comparing it with the conventional optimization method.
Section 6 presents the verification experiments, validating the feasibility of the proposed method in practical operations. Finally, the concluding remarks are given in
Section 7.
4. Case Study and Superiority Verification
4.1. Case Study of the PTP-Based Method
In this section, the feasibility of the proposed PTP-based optimization method for ballast water allocation is evaluated using a case study. The “Nan Tian Long” RFC currently serving in China is selected as the object of study and the corresponding structure and performance parameters are listed in
Table 2 [
1]. To facilitate the calculation, the actual “Nan Tian Lon” RFC is simplified into two main components, including the upper lifting system and the internal ballast system, as illustrated in
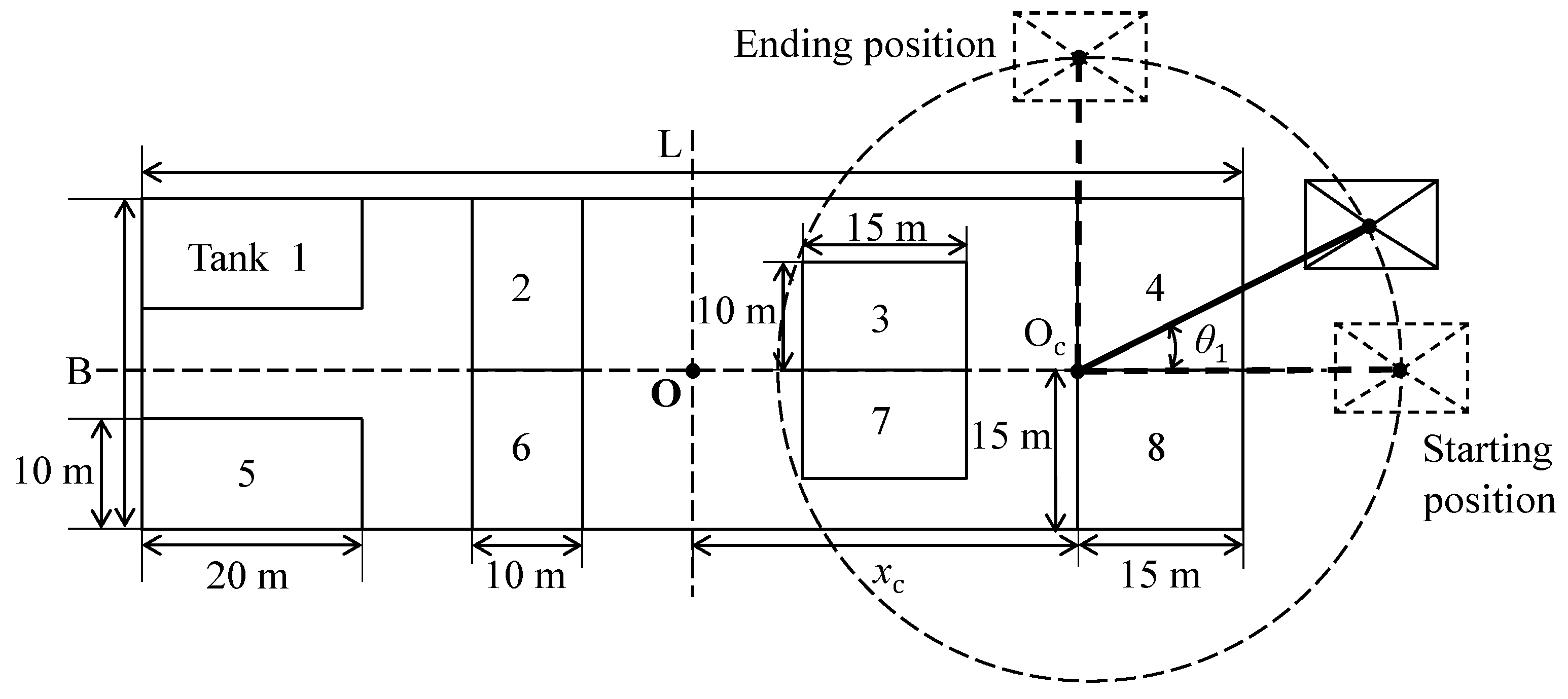
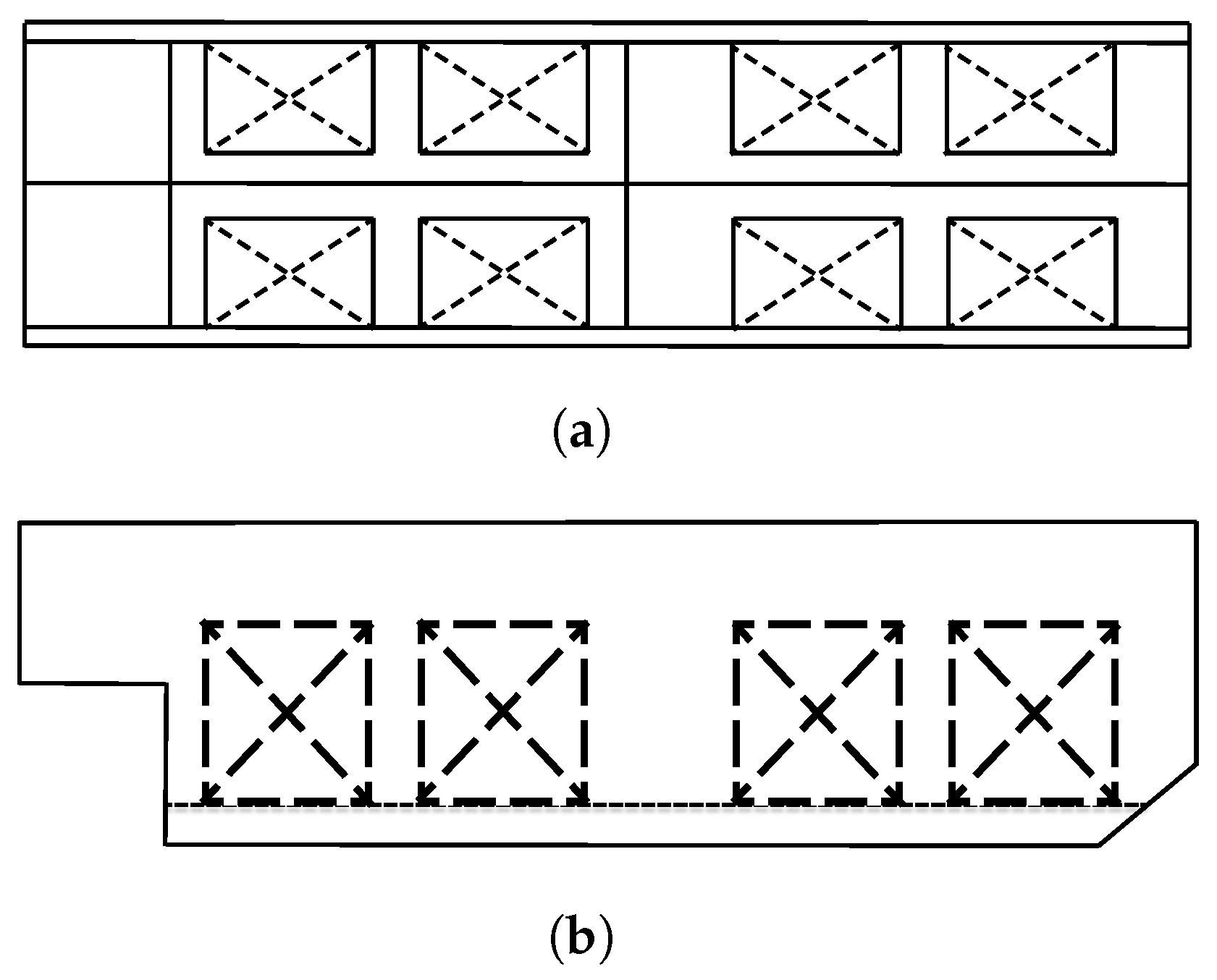
Figure 3. As observed, the crane includes a rotating base for executing rotational activities, an amplitude boom for controlling the span size, and hoisting ropes for lifting operations. For the ballast system, all the ballast tanks inside the hull are simplified into eight symmetrical rectangular structures, and the corresponding arrangements and sizes of the simplified tanks are illustrated in detail in
Figure 4, in which 1∼8 denote the tank number. Complementarily, the structure parameters of the simplified tanks are also stated in
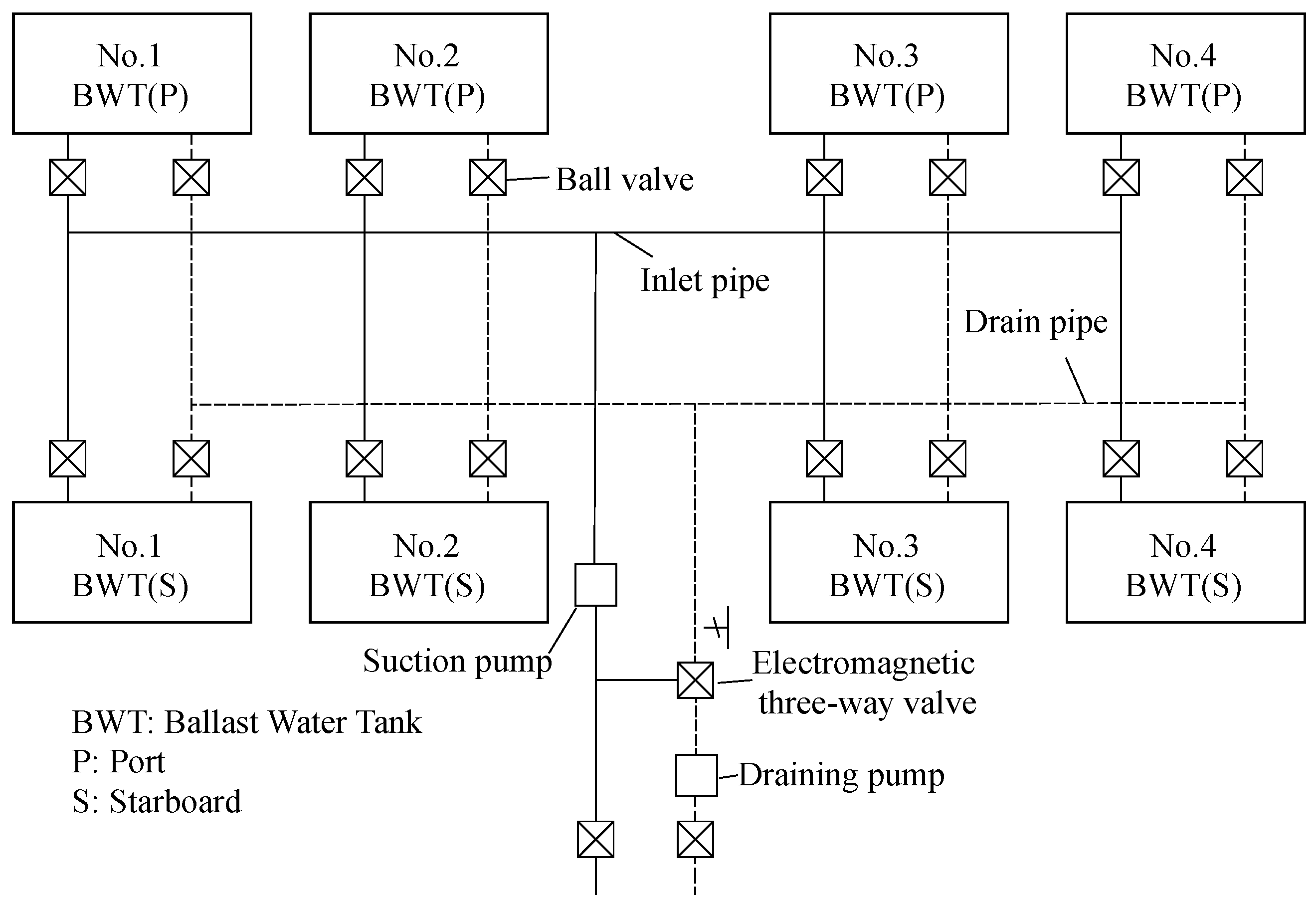
Table 2. For better clarification, a schematic diagram of the corresponding ballast piping system is illustrated in
Figure 5, from which it can be seen that any ballast tank can freely exchange ballast water with the other seven tanks. In addition, to facilitate the description of the optimization problem of the ballast water allocation, a Cartesian coordinate system is established, as shown in
Figure 3, with the z-axis along the vertical line passing through the barycenter of the RFC and the x-axis along the bottom surface of the RFC in the direction of the stern.
In this case study, the lifting task is set to lift a 300 t load from a 0° position at the stern and rotate horizontally to a 90° position with the lifting radius being 30 m. In detail, the initial and ending positions of the lifting trajectory predefined here are (65, 0, 70) and (35, 30, 70), respectively. Consequently, there is no direct contact between the load and the deck throughout the entire lifting process in this case study. The time consumption of the ballast water allocation process is the same as the lifting duration, which is 12.00 min. The corresponding sea conditions are listed in
Table 3.
In this section, the genetic algorithm is selected to align with theoptimization model of the ballast water allocation. The corresponding population size, the number of iterations, the crossover rate, and the mutation rate are set to 100, 50, 0.8, and 0.01, respectively. The computer configuration used is the Windows 10 operating system, equipped with a 2.60 GHz Intel(R) Core(TM) i7-10750H processor (Intel, Santa Clara, CA, USA) and 8.0 GB of memory, located in Dalian Maritime University, Dalian, China.
The optimal value of the objective function obtained from the PTP-based optimization method is 489.54 t, and the corresponding optimal design variables are listed in
Table 4.
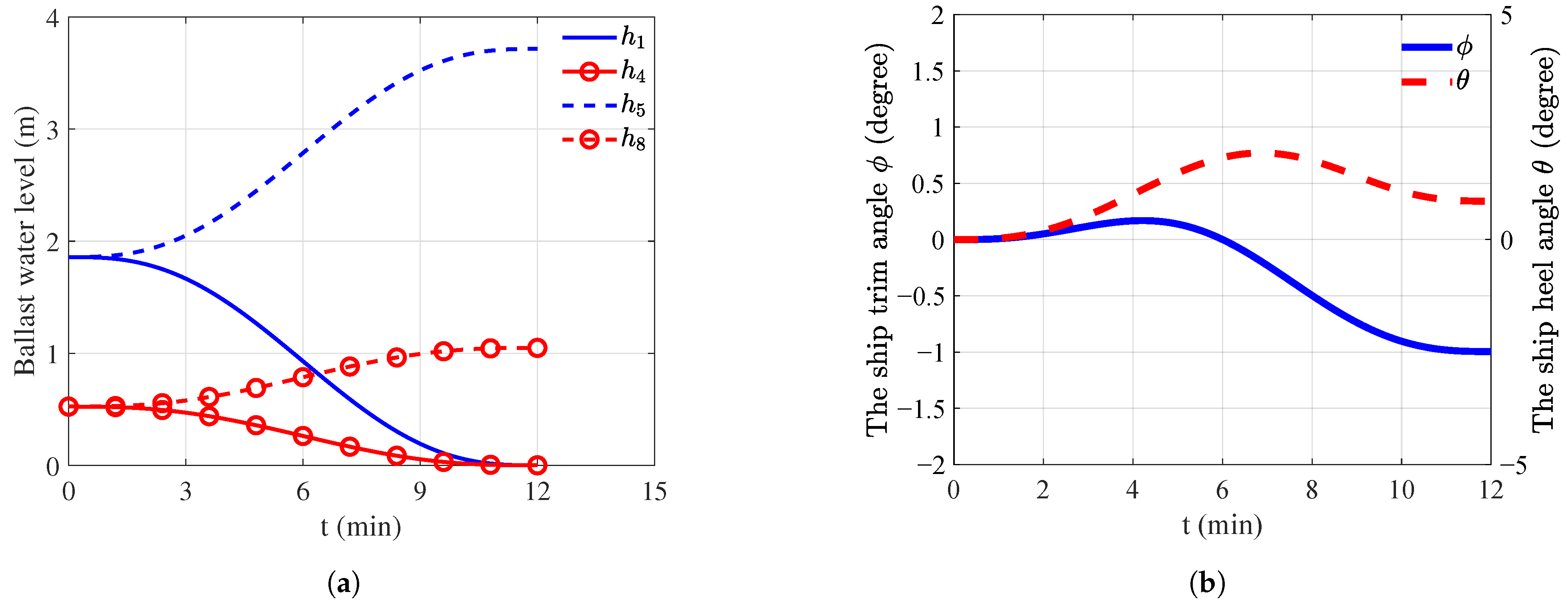
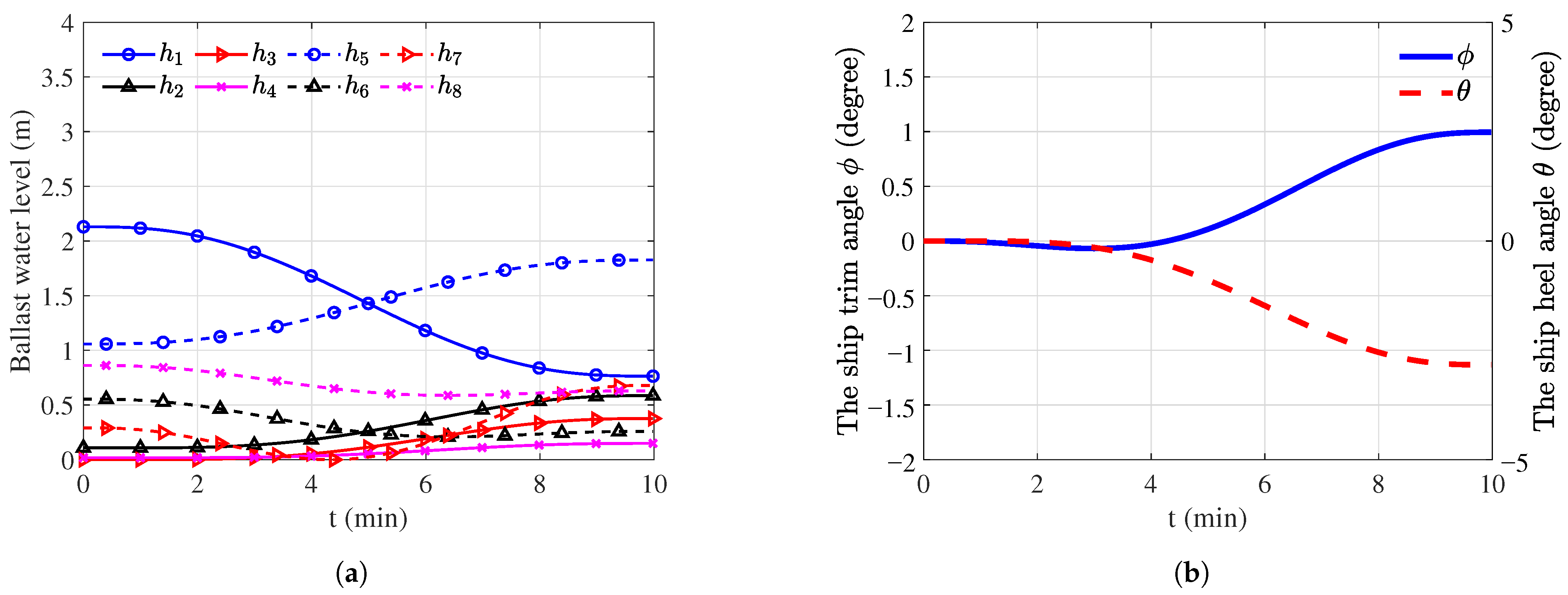
Figure 6a shows the optimal ballast water-level curve obtained from the proposed PTP-based optimization method. Overall, four ballast tanks (Tanks 1, 4, 5, and 8) are involved in the ballasting process, which is achieved using the optimization methods, rather than being attributed to limitations in the physical structure of the ballast system itself. As seen, the water level curves of Tanks 1, 4, 5, and 8 exhibit smooth and continuous characteristics. As the crane rotates, the water levels in Tanks 1 and 4, which are on the same side as the cargo lifting, gradually decrease until they are completely emptied. In contrast, the water levels in Tanks 5 and 8, located on the opposite side of the cargo-lifting direction, show gradual rising trends. Furthermore, it is found that the amplitude of the water level changes in Tanks 1 and 4, located farther from the cargo-lifting position, is significantly larger than that in Tanks 5 and 8, located at the stern.
The duration curves of the heeling and trim angles of the hull during the lifting operation are illustrated in
Figure 6b, in which the left ordinate indicates the trim inclination and the right ordinate indicates the heeling inclination. It is evident that the maximum heeling angle and trim angle of the hull are both within the safe range (the safe range of heeling angles is −5°∼+5°, and the safe range of trim angles is −2°∼+2°), meeting the industry requirements of the RFC operations.
In summary, the PTP-based optimization method proposed in this study can successfully devise an optimal ballast water allocation scheme for RFCs. The obtained ballasting process is smooth, continuous, and complies with the safety requirements of the relevant industry, fully demonstrating the feasibility of the PTP-based optimization method in solving such problems.
4.2. Comparison Analysis of the PTP-Based Method
4.2.1. Conventional Optimization Method for Ballast Water Allocation
For the ballast water allocation problem of RFCs, the current mainstream optimization strategy is the Multi-stage Optimization method based on the Dynamic Programming Theory (DPT-MO), which is also widely used in mathematics, computer science, and operations research, etc. The specific flow of using the DPT-MO method to solve the optimization problem of ballast water allocation is presented in
Figure 7. As seen, the dynamic allocation process of the ballast water during the lifting operation is uniformly discretized into multiple stages (for example discretized according to the rotation angle of the boom). For each stage, an optimization solution process is carried out independently to obtain several feasible allocation schemes; then, the optimal solution at each stage which can achieve the overall optimal allocation scheme is retained one by one based on the recursion relation, and other solutions are discarded. Finally, all the optimal local solutions are connected to obtain an overall optimal strategy.
Specifically, the DPT-MO method essentially transforms the ballast water allocation problem into a series of sub-optimization problems. This approach requires multiple iterations and solutions throughout the entire optimization process, which inevitably leads to a lower computational efficiency. As a result, a significant amount of computational resources and time are consumed, and it may even cause the curse of dimensionality during numerical solving.
4.2.2. Comparison Results Analysis
In order to verify the feasibility and superiority of the proposed method, it is compared with the conventional method. To ensure the reliability of the comparison, the two optimization methods need to solve the same engineering problems, including consistent lifting tasks, operating conditions, etc.
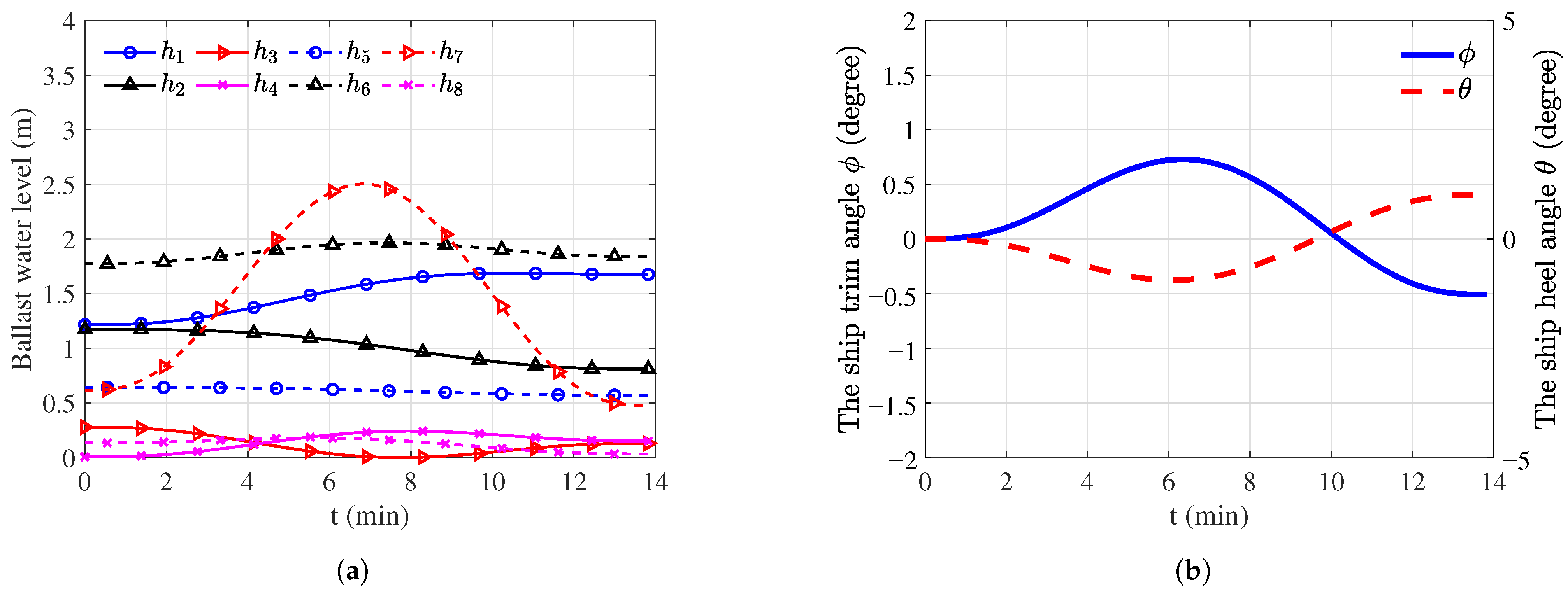
After setting the same constraints and objective function as the PTP-based optimization model, the duration curves of the ballast water level obtained from the DPT-MO method are shown in
Figure 8. The water level variations of each corresponding tank obtained from the DPT-MO method and the PTP method are similar, but there are still noticeable differences. From
Figure 8, it is observed that the water level curve obtained from the DPT-MO method is not smooth and exhibits local abrupt changes, which may have negative impacts on the stability of the RFC operation. In contrast, the water level curve obtained from the PTP-based method is smoother, better meeting the stability requirements of offshore lifting operations, and facilitating the controls of the ballast system. Additionally, it is evident from
Figure 8 that the water level variation in ballast Tank 4 obtained from the PTP-based method is much smaller compared to the DPT-MO method. This indicates that the PTP-based method can effectively decrease the amount of ballast water allocation, reduce time costs, and lower the energy consumption of the system.
The detailed comparisons of the obtained allocation schemes between the DPT-MO method and the PTP method are presented in
Table 5. It is observed that the PTP-based method leads to a significant reduction in the quantity of the ballast water allocation, decreasing from 595.22 t to 489.54 t by 17.75% compared to the DPT-MO method. Due to the reduction in the total amount of ballast water allocation, the time cost of the ballast scheme obtained from the PTP-based method is lower. In terms of decision-making time, the DPT-MO method takes 6.30 min to complete the optimization, while the PTP-based method requires around 1.67 min, which is nearly 1/4 of DPT-MO method. The significant decrease in decision-making time is mainly attributed to the different solution strategies employed by these two methods. The DPT-MO method essentially divides the ballast water allocation process into multiple decision stages and performs optimization solving at each stage. In contrast, the PTP-based method is a complete and continuous solving process, and it performs a single solution for the entire ballasting process. In addition, the heeling and trim angles of the hull corresponding to the DPT-MO method and the PTP-based method are both kept within the safety range specified by the industry (≤2°).
4.3. Superiority Discussion
In summary, the PTP-based optimization method proposed in this paper can successfully design the optimal ballast water allocation plan for the RFC. The water level curve changes smoothly, and the process is continuous. Compared to traditional methods, it can better adapt to the matching of electronic control parameters and is more conducive to achieving the reliable control of ballast water allocation in practical operations. Additionally, the inclination angles of the hull obtained through the PTP-based optimization method meet the safety requirements of the relevant industry, ensuring the safety and stability of the entire offshore lifting operation. In addition, it can be concluded that under the same working conditions, the PTP-based method proposed in this study can significantly improve the comprehensive working performance of the ballast system, especially in the aspects of ballast water allocation efficiency, ballast water allocation quantity, and decision-making time. Through comparison with traditional methods, it is evident that the PTP-based optimization method effectively addresses the RFC ballast water allocation problem, demonstrating certain feasibility and superiority.
7. Conclusions and Future Work
The current ballast water allocation processes of the RFC rely on manual operations, which are susceptible to factors such as personnel status and sea conditions, leading to low lifting efficiency, high energy consumption, and poor safety. The intelligent and automatic allocation of ballast water is an effective way to address the above issues; however, the relevant industry lacks reliable and efficient optimization methods for ballast water allocation. Therefore, this paper proposes an efficient and continuously solvable optimization method for ballast water allocation based on the PTP theory, transforming the traditional optimal control problem into a nonlinear constraint problem. Under the same working conditions, the proposed PTP-based optimization method reduces the energy consumption by 17.75% compared to the conventional method. Additionally, the PTP-based optimization method significantly reduces the decision-making time by 73.49% compared to the conventional method, making it more suitable for the efficiency requirements of the intelligent ballast water allocation. Numerical experiments are conducted to verify the superiority and reliability of the proposed method, and practical water-lifting experiments are also performed to verify the engineering feasibility of the PTP-based ballast water-allocation method. The PTP-based optimization method of ballast water allocation can significantly improve the safety and energy efficiency of RFC operations, laying a theoretical and methodological foundation for the intelligent development of the RFC and other maritime equipment.
The PTP-based optimization method of ballast water allocation proposed in this study is based on the known lifting trajectory of the RFC; namely, the obtained ballast allocation scheme is adapted to the known lifting trajectory. However, in actual working conditions, ballast water allocation and lifting trajectory interact with each other and jointly determine the safety and economy of offshore lifting operations. Therefore, it is necessary to study the collaborative optimization method of ballast water allocation and lifting trajectory in further work. During lifting operations in local waters, the external allocation operating mode of the ballast system (the ballast water may be exchanged between the tanks and the sea) can be utilized. Thus, further research into enhancing the proposed PTP-based optimization method for the external allocation operating mode is a key focus of our future work. In actual operational processes, the pump failure and leakage have significant impacts on the performance of the RFC; therefore, it is crucial to take into account these issues during the optimization process of ballast water allocation. Additionally, future research efforts can explore the inverse design aspect of the barge, specifically concentrating on determining the dimensions and positions of its ballast tanks. This can be achieved by leveraging the proposed PTP-based optimization method for the allocation of ballast water.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}