
Comparison of Different Methods for Ancient Ship Calm Water Resistance Estimation

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Aim and Scope of this Work
- A detailed explanation of methods used for assessing (ancient) ship resistance on calm water is presented in Section 3 with a short description of the theoretical background for all four methods;
- Initial data, such as ship particulars (model size and life size), and materials and methods are stated for each method in Section 4 with an explanation of the chosen calculation parameters;
- Results are presented in Section 5 with a model size comparison between CFD and the experiment presented in Section 5.1 and a comparison of all four methods on a life-size ship presented in Section 5.2;
3. Methods
3.1. Towing tank tests
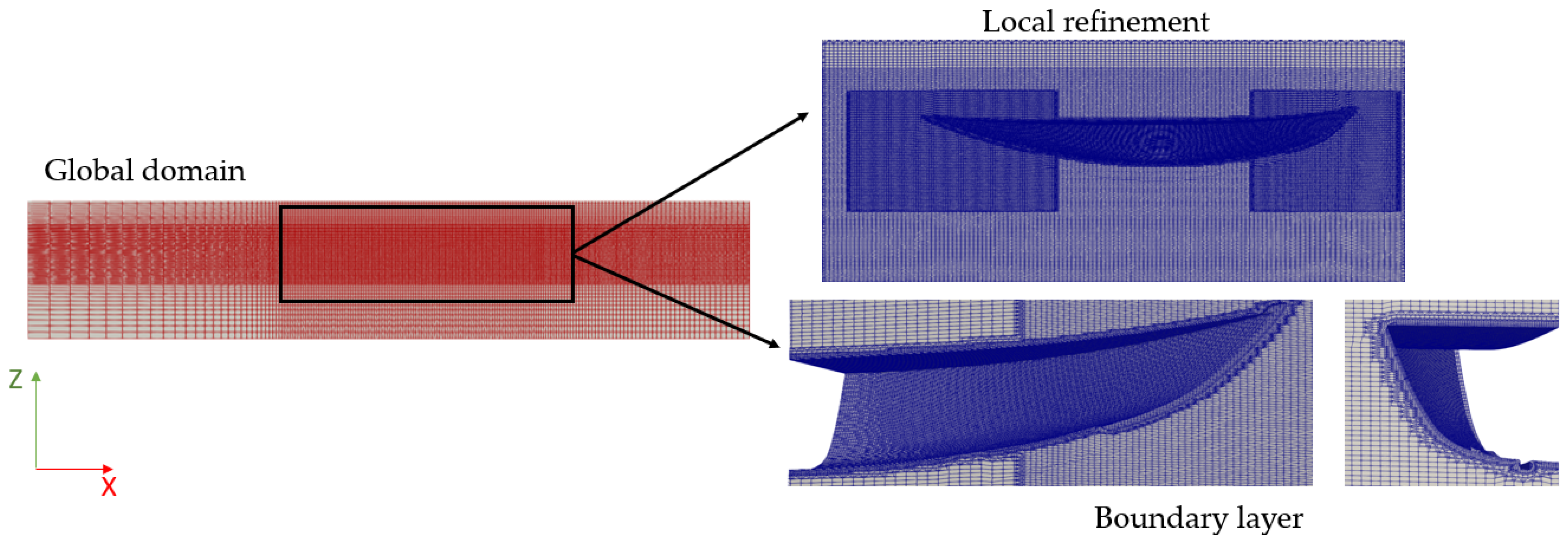
3.2. Numerical Approach—CFD
3.3. Empirical Methods
3.3.1. Holtrop–Mennen
3.3.2. Delft Systematic Hull Yacht Series (DSYHS)
4. Analysis Setup
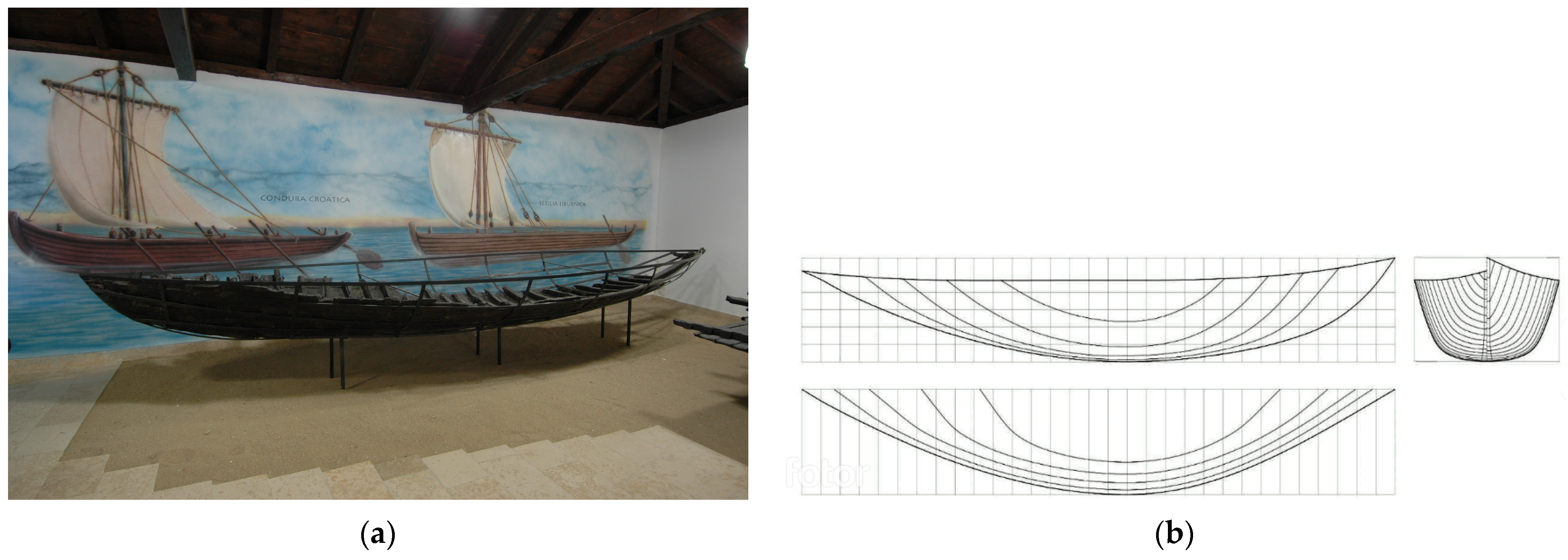
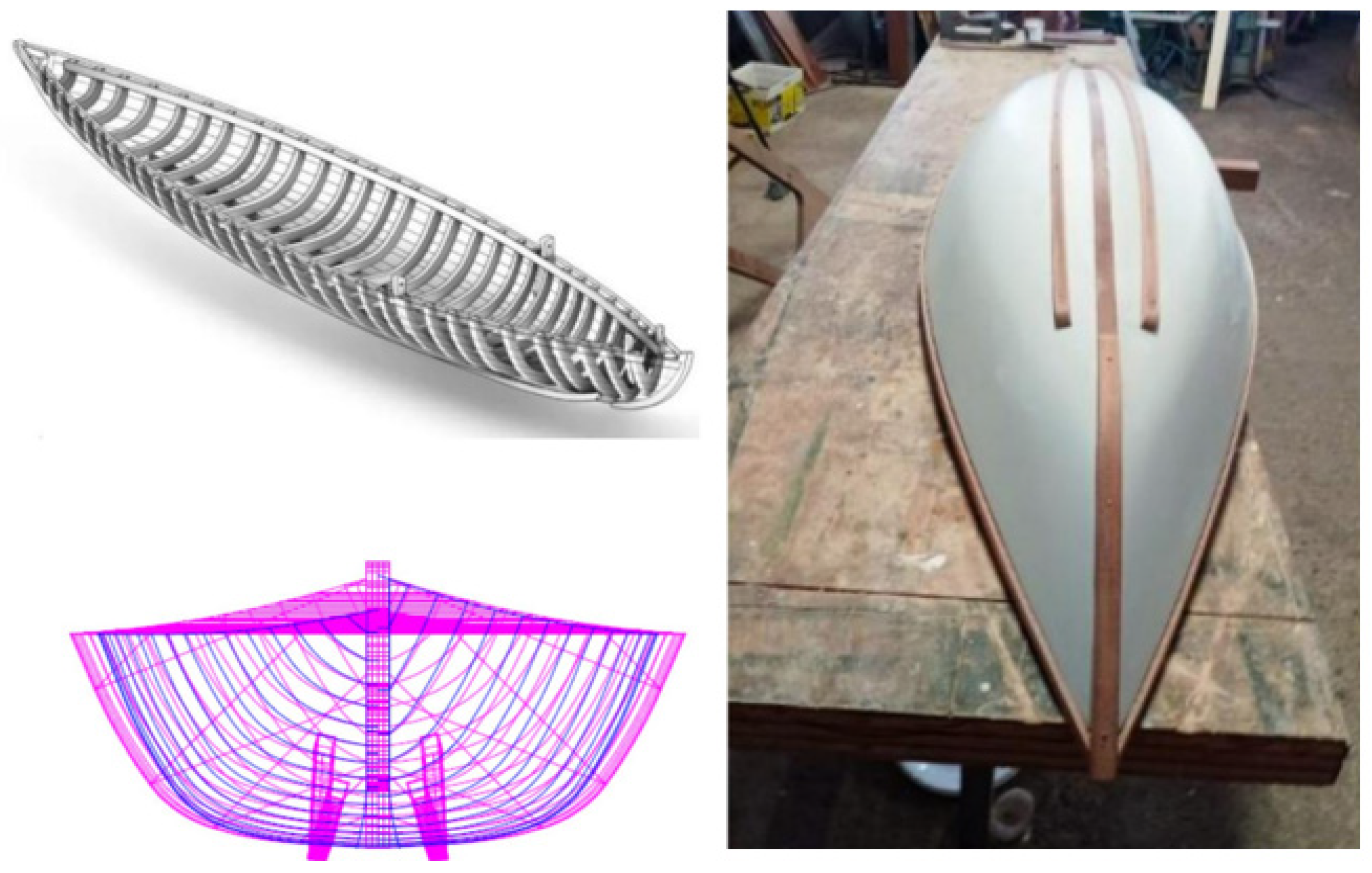
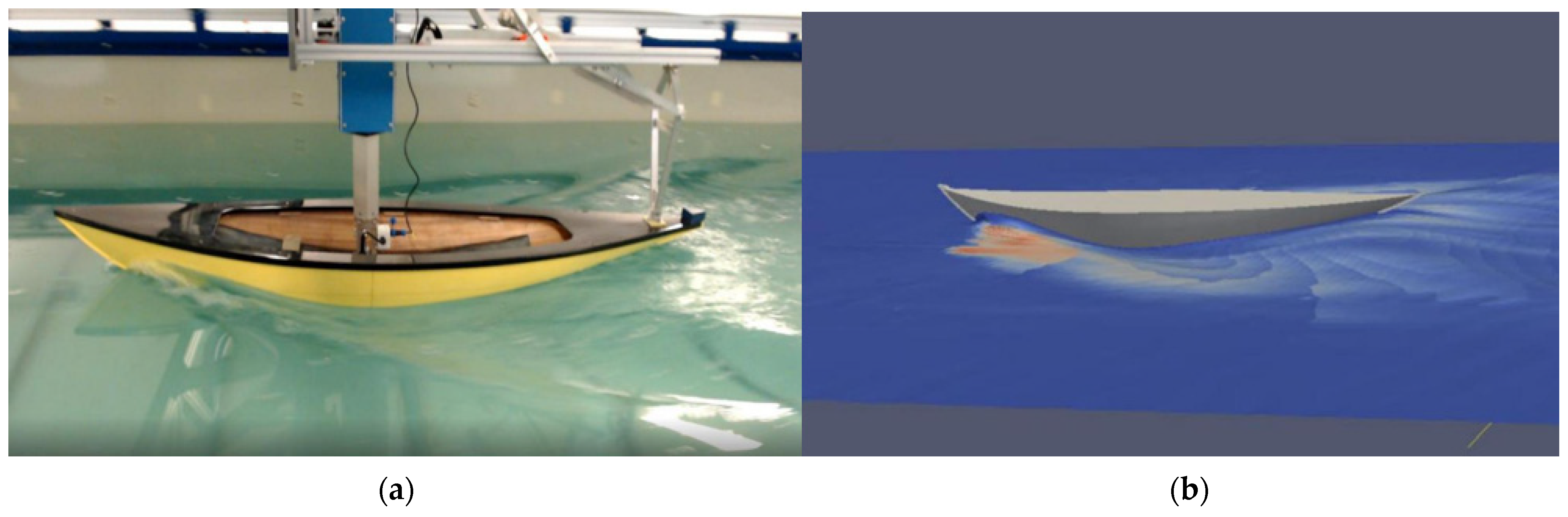
4.1. Case Study—Nin 1
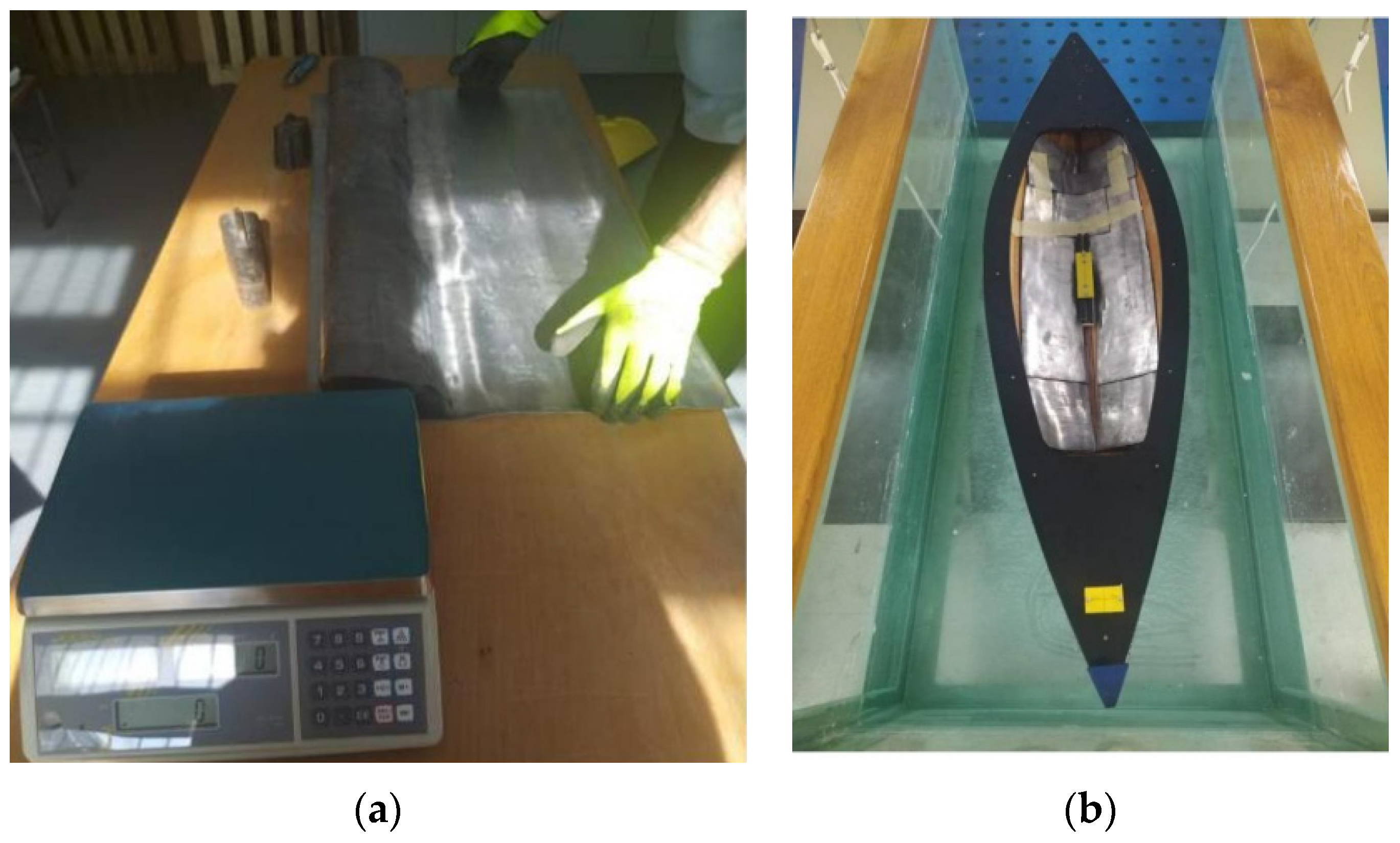
Towing Test Experiment
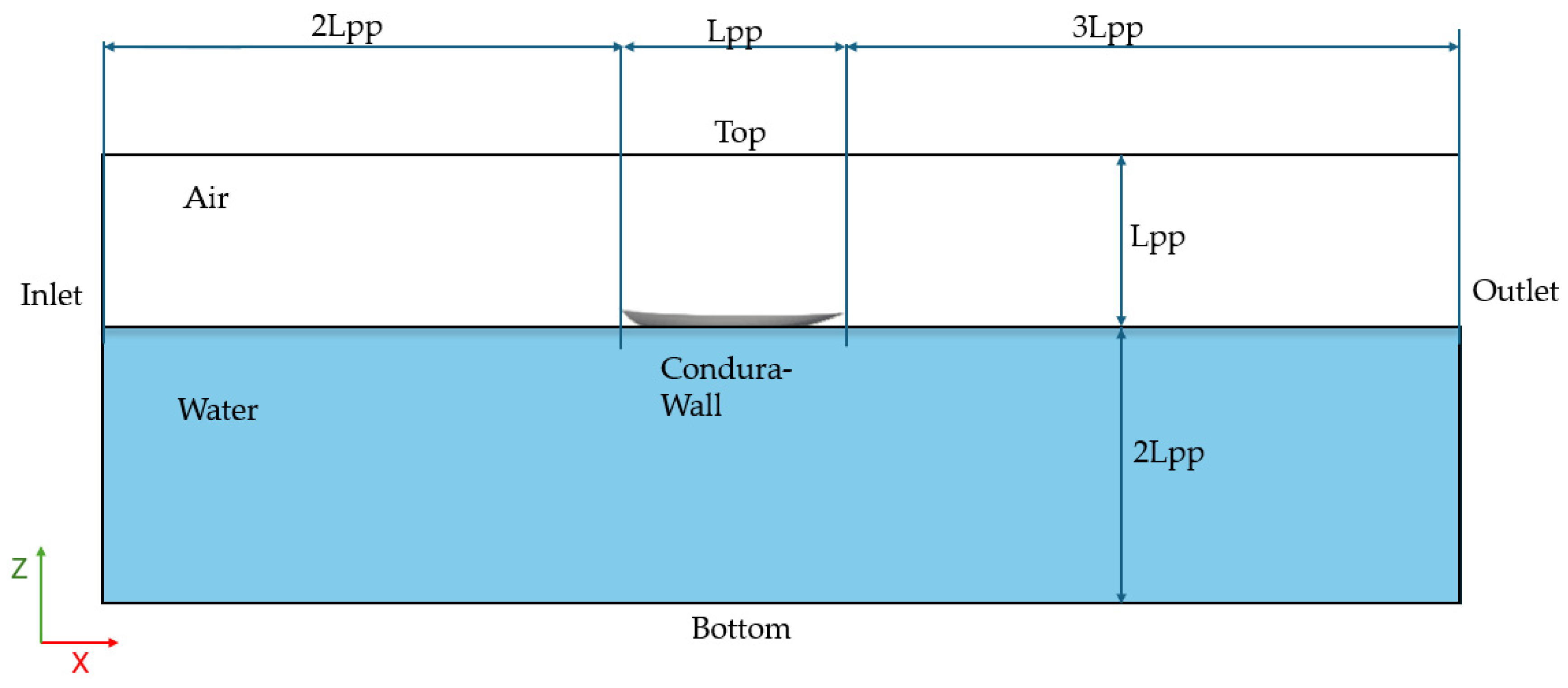
4.2. Numerical Approach—CFD
4.3. Empirical methods
4.3.1. Holtrop–Mennen
4.3.2. Delft Systematic Hull Yacht Series (DSYHS)
5. Results
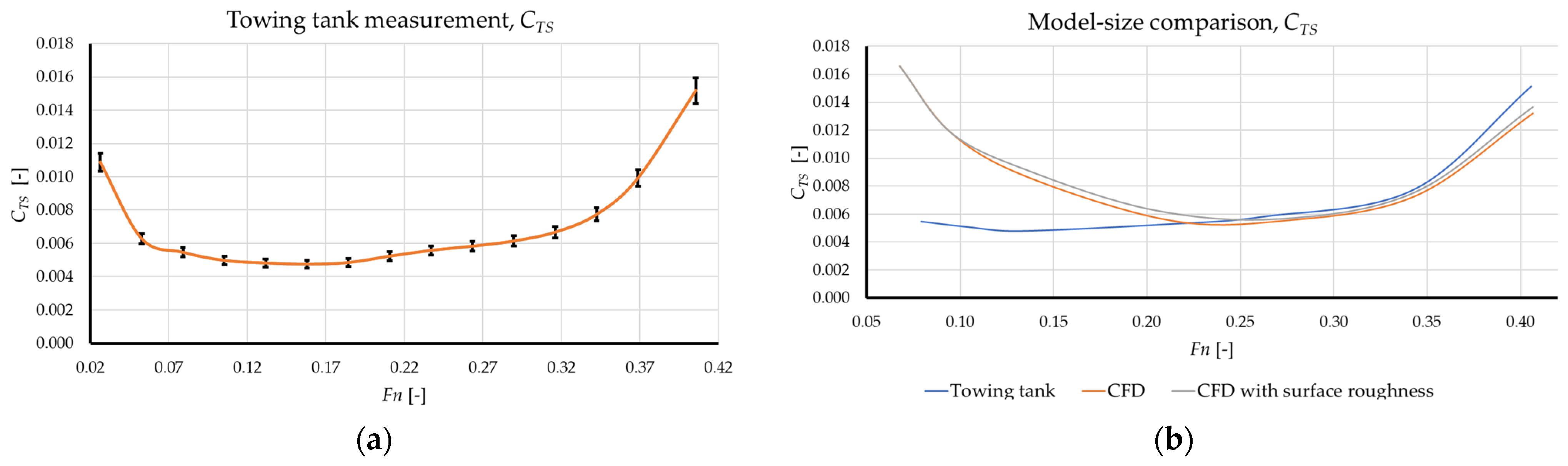
5.1. Model-Size Nin 1
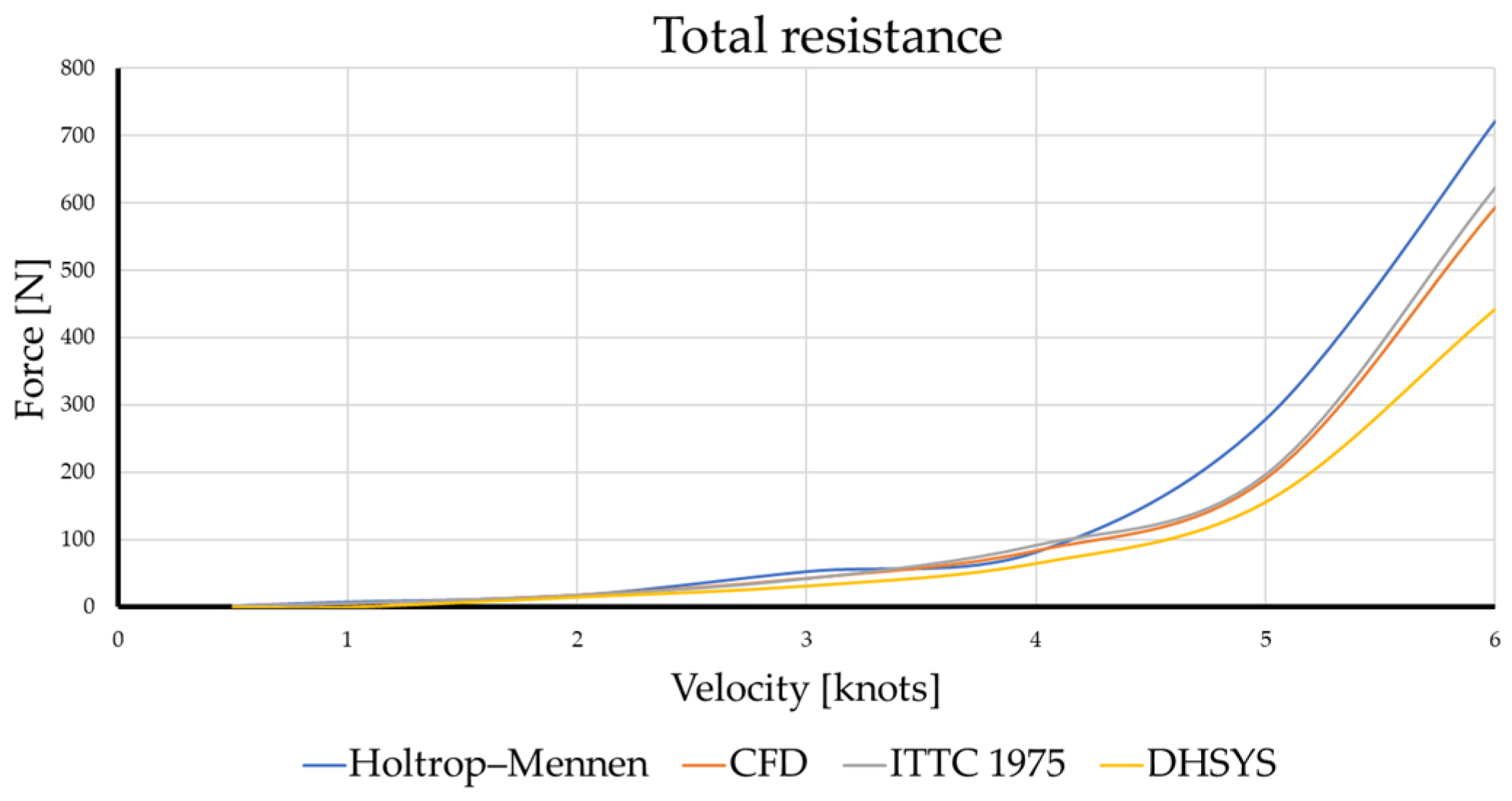
5.2. Life-Size Nin 1
6. Discussion
7. Conclusions
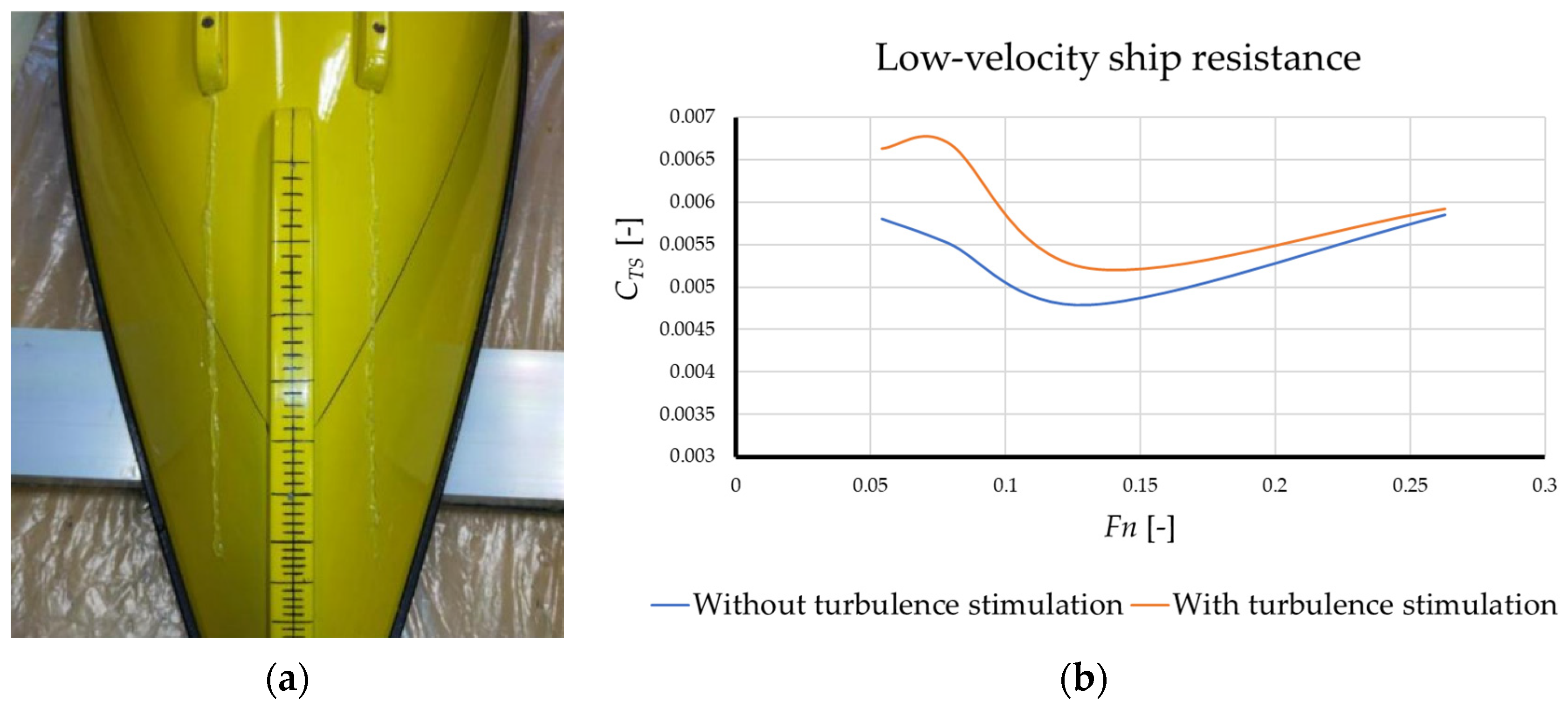
- CFD proved to be a reliable and accurate method for predicting ancient ship resistance. Differences between the experimental and CFD approach occurred in a very low-velocity range of >0.5 knots (0.25 m/s). As the CFD model converged after 1500 increments, the focus was shifted to testing equipment, which showed extreme sensitivity when dealing with a low-force reading of <0.2 N. This leads to the conclusion that standard accelerometers are not capable of reading extremely low values of force;
- An additional set of simulations performed with surface roughness showed that the implemented roughness model simply offsets the resistance curve and gives more accurate results in a model-size case;
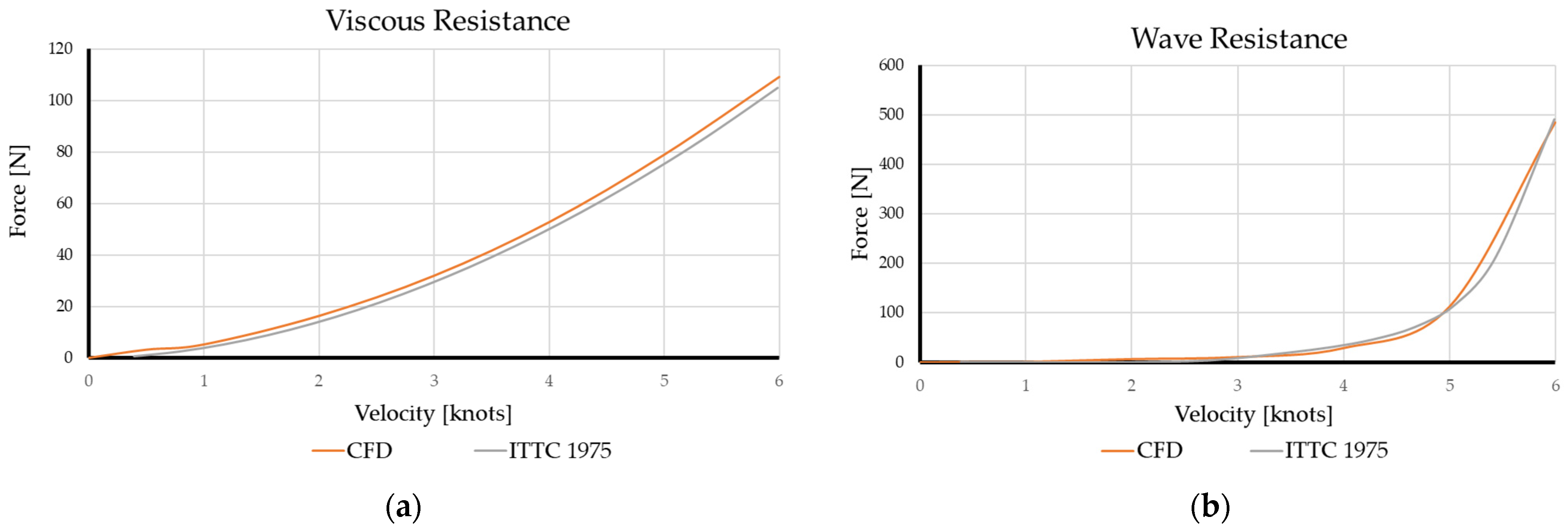
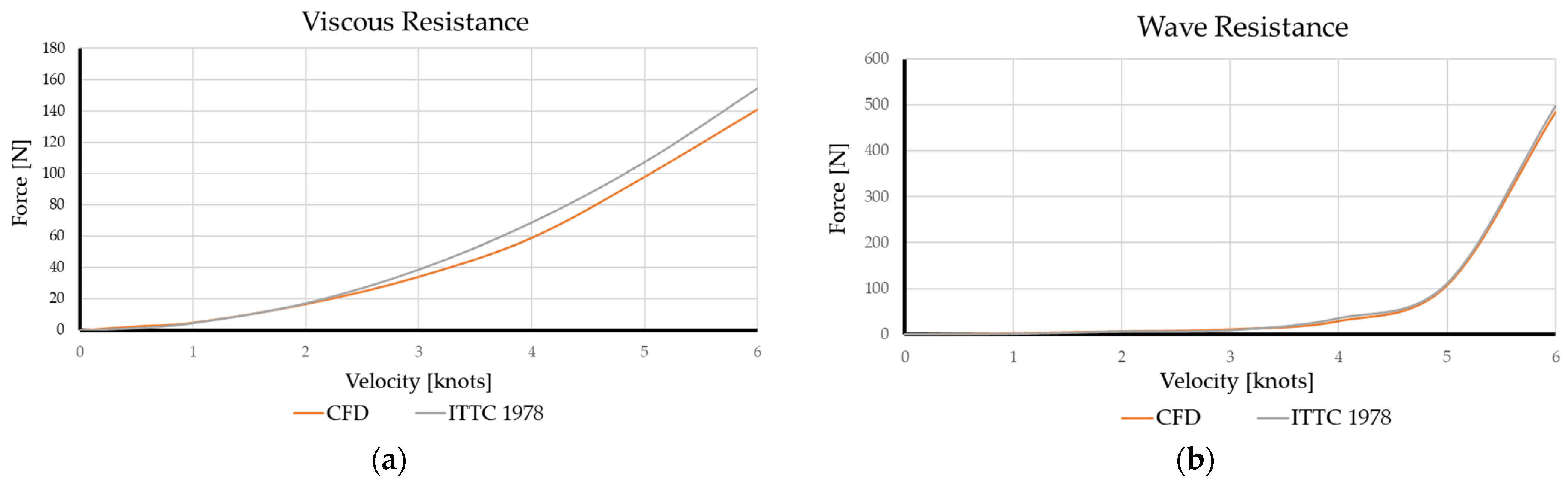
- When a comparison of resistance for the life-size Nin 1 was analysed, CFD again proved to be excellent in predicting resistance with significance only occurring in a low-velocity region;
- If surface roughness is applied in both extrapolation methods (ITTC 1978) as well in CFD, the difference between the results is higher;
- The Holtrop–Mennen method proved the suspicion that it is inefficient in predicting ship resistance for smaller boats with an average difference of 20% to experimental results and inconsistent agreement with the experimental results;
- Delft Yacht Hull Series showed better overlap than Holtrop–Mennen, with differences varying between 6 and 25%. The drawbacks of this method are insufficient data applicable to ancient ships as well as a velocity range that does not cover the whole Nin 1 assumed operational velocity range and thus, many other ancient ship velocities.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| a0–7 | ship acceleration coefficient [-] |
| Am | midship cross-sectional area [m2] |
| Aw | waterplane surface area [m2] |
| B | smooth wall log law intercept [-] |
| Bwl | beam of waterline [m] |
| CA | ship cross-section coefficient [-] |
| CAAS | air resistance coefficient [-] |
| CAppS | resistance due to appendages [-] |
| Cb | block coefficient [-] |
| CF | frictional resistance coefficient [-] |
| Cm | midship section coefficient [-] |
| Cp | prismatic coefficient [-] |
| CTS | total resistance coefficient [-] |
| CTM | total resistance coefficient in model scale [-] |
| CW | wave-resistance coefficient [-] |
| Fn | Froude number [-] |
| Ey+ | non-dimensional normal distance to the wall [-] |
| g | gravity [m2/s] |
| k | form factor [-] |
| ks | form factor with surface roughness [-] |
| Lpp | vessel length [m] |
| LCBfpp | longitudinal position of the centre of buoyancy [m] |
| LCFfpp | longitudinal position of the centre of floatation [m] |
| Lwl | length of waterline [m] |
| RT | total resistance [N] |
| RF | frictional resistance [N] |
| RP | pressure resistance [N] |
| RV | viscous resistance [N] |
| RW | wave resistance [N] |
| Re | Reynolds number [-] |
| Tc | draft [m] |
| v | ship surge velocity [m/s] |
| volume of displaced canoe body [m3] | |
| κ | von Karman constant [-] |
| ρ | water density [kg/m3] |
| λ | scaling factor [-] |
References
- Vosmer, T. The Jewel of Muscat Reconstructing a ninth-century sewn-plank boat. In Proceedings of the Forty-Fourth Meeting of the Seminar for Arabian Studies, London, UK, 22–24 July 2010; Volume 41, pp. 411–424. [Google Scholar]
- Pomey, P.; Kahanov, Y.; Rieth, E. Transition from Shell to Skeleton in Ancient Mediterranean Ship-Construction: Analysis, problems, and future research. Int. J. Naut. Archaeol. 2012, 41, 235–314. [Google Scholar] [CrossRef]
- Coates, J.F. Reconstructing the ancient Greek trireme warship. Endeavour 1987, 11, 94–99. [Google Scholar] [CrossRef]
- Murray, W.M.; Ferreiro, L.D.; Vardalas, J.; Royal, J.G. Cutwaters Before Rams: An Experimental Investigation into the Origins and Development of the Waterline Ram: An Experiment in Ancient Cutwater Hydrographics. Int. J. Naut. Archaeol. 2017, 46, 72–82. [Google Scholar] [CrossRef]
- Palmer, C. Windward Sailing Capabilities of Ancient Vessels. Int. J. Naut. Archaeol. 2009, 38, 314–330. [Google Scholar] [CrossRef]
- Lasher, W.C.; Flaherty, L.S. CFD Analysis of the Survivability of a Square-Rigged Sailing Vessel. Eng. Appl. Comput. Fluid Mech. 2009, 3, 71–83. [Google Scholar] [CrossRef]
- Ciortan, C.; Fonseca, N. Numerical Simulations of the Sails of a XVIth Century Portuguese Nau Marine 201. In Proceedings of the International Conference on Computational Methods in Marine Engineering, Lisbon, Portugal, 28–30 September 2011; pp. 278–289. [Google Scholar]
- Rudan, S.; Radić Rossi, I. Numerička simulacija potonuća broda na temelju arheoloških zapisa. Archaeol. Adriat. 2020, 14, 129–157. [Google Scholar] [CrossRef]
- Fawsitt, S.; Hobberstad, L.C. Computational Fluid Dynamics: Floating a Digital Barcode 02. Archaeonautica 2021, 21, 325–330. [Google Scholar] [CrossRef]
- Subbaiah, B.V.; Thampi, S.G.; Rambabu, N.; Mustafa, V.; Akbar, M.A. Characterization and CFD Analysis of Traditional Vessels of Kerala. Int. J. Innov. Technol. Explore. Eng. 2020, 9, 132–149. [Google Scholar] [CrossRef]
- Jerat, G.; Rudan, S.; Zamarin, A.; Rossi, I.R. Uncertainty in the Reconstruction of the Ancient Ship Hull and Its Impact on Sailing Characteristics. In Proceedings of the 16th International Symposium on Boat and Ship Archeology, Zadar, Croatia, 26 September–1 October 2021. [Google Scholar]
- Handley, P. The Sutton Hoo Ship: Development and Analysis of a Computer Hull Model, Prior to Full-Scale Reconstruction. In Proceedings of the Historic Ships, London, UK, 7–8 December 2016; Royal Institute of Naval Architects: London, UK, 2016; pp. 137–147. [Google Scholar]
- Tanner, P.; Whitewright, J.; Startin, J. The Digital Reconstruction of the Sutton Hoo ship. Int. J. Naut. Archaeol. 2020, 49, 5–28. [Google Scholar] [CrossRef]
- International Towing Tank Conference (ITTC). Form Factor According to Prohaska. Proceedings of the 14th International Towing Tank Conference, ITTC’75, Ottawa, Canada, Volume 1. 1975. Available online: https://repository.tudelft.nl/islandora/object/uuid%3A9d57e745-61cc-4e9c-9f0d-c98c659059b2 (accessed on 1 April 2024).
- International Towing Tank Conference (ITTC). ITTC—Recommended Procedures and Guidelines. 1978 ITTC Performance Prediction Method; 7.5-02-03; International Towing Tank Conference (ITTC): Zürich, Switzerland, 2017; Available online: https://www.ittc.info/media/8017/75-02-03-014.pdf (accessed on 1 April 2024).
- Prohaska, C. A simple method for the evaluation of the form factor and the low speed wave resistance. In Hydro-and Aerodynamics Laboratory, Lyngby, Denmark, Hydrodynamics Section. In Proceedings of the 11th International Towing Tank Conference, ITTC’66, Tokyo, Japan, October 1966; Resistance Committee: Tokyo, Japan, 1966; pp. 65–66. [Google Scholar]
- Bøckmann, E.; Steen, S. Model test and simulation of a ship with wavefoils. Appl. Ocean Res. 2016, 57, 8–18. [Google Scholar] [CrossRef]
- Wang, J.; Yu, H.; Zhang, Y.; Xiong, X. CFD-based method of determining form factor k for different ship types and different drafts. J. Mar. Sci. Appl. 2016, 15, 236–241. [Google Scholar] [CrossRef]
- van Chinh, H.; Thai, T.T. Improving the Accuracy of Ship Resistance Prediction Using Computational Fluid Dynamics Tool. Int. J. Adv. Sci. Eng. Inf. Technol. 2020, 10, 171. [Google Scholar] [CrossRef]
- Pena, B.; Huang, L. A review on the turbulence modelling strategy for ship hydrodynamic simulations. Ocean. Eng. 2021, 241, 110082. [Google Scholar] [CrossRef]
- Park, D.W.; Lee, S.B. The sensitivity of ship resistance to wall-adjacent grids and near-wall treatments. Int. J. Nav. Archit. Ocean. Eng. 2018, 10, 683–691. [Google Scholar] [CrossRef]
- Van Nguyen, T.; Van Ngo, H.; Ibata, S.; Ikeda, Y. Effects of Turbulence Models on the CFD results of Ship Resistance and Wake. In Proceedings of the Japan Society of Naval Architects and Ocean Engineers, Hiroshima, Japan, 27–28 November 2017; Volume 25, pp. 199–204. [Google Scholar]
- Matsuda, S.; Katsui, T. Hydrodynamic Forces and Wake Distribution of Various Ship Shapes Calculated Using a Reynolds Stress Model. J. Mar. Sci. Eng. 2022, 10, 777. [Google Scholar] [CrossRef]
- Ge, G.; Zhang, W.; Xie, B.; Li, J. Turbulence model optimization of ship wake field based on data assimilation. Ocean. Eng. 2024, 295, 116929. [Google Scholar] [CrossRef]
- Holtrop, J.; Mennen, G.G.J. An approximate power prediction method. Int. Shipbuild. Prog. 1982, 29, 166–170. [Google Scholar] [CrossRef]
- Holtrop, J. A statistical re-analysis of resistance and propulsion data. Int. Shipbuild. Prog. 1984, 31, 272–276. [Google Scholar]
- Holtrop, J. A statistical resistance prediction method with a speed dependent form factor. In Proceedings of the Scientific and Methodological Seminar on Ship Hydrodynamics (SMSSH ’88), Varna, Bulgaria, 1 October 1988. [Google Scholar]
- Birk, L. Fundamentals of Ship Hydrodynamics: Fluid Mechanics, Ship Resistance and Propulsion; John Wiley Sons: Hoboken, NJ, USA, 2019; pp. 611–627. ISBN 978-1-118-85551-5. [Google Scholar]
- Keuning, J.A.; Sonnenberg, U.B. Approximation of the Hydrodynamic Forces on a Sailing Yacht based on the Delft Systematic Yacht Hull Séries’. In Proceedings of the 15th International Symposium on “Yacht Design and Yacht Construction”, Amsterdam, The Netherlands, 16 November 1998; ISBN 90-370-01-71-8. [Google Scholar]
- Radić Rossi, I.; Liphshitz, N. Analiza drvene građe srednjovjekovnih brodica iz Nina. Archaeol. Adriat. 2020, 10, 257–270. [Google Scholar] [CrossRef]
- Nicolardi, M.; Bondioli, M.; Radić Rossi, I. The Contribution of Historical Sources in the Reconstruction of the Nin 1 Original Hull Form. In ISBSA 16, Sailing through History, Zadar 2021, Book of Abstracts.; Batur, K., Fabijanić, T., Radić Rossi, I., Eds.; University of Zadar: Zadar, Croatia, 2021; p. 105. [Google Scholar]
- McNeel, R. Rhinoceros 3D, Version 6.0. Robert McNeel; Associates: Seattle, WA, USA, 2010. [Google Scholar]
- AutoHydro Users Manual; Autoship Systems Corporation: Vancouver, BC, Canada, 2011.
- Weller, H.G.; Tabor, G.; Jasak, H.; Fureby, C. A tensorial approach to computational continuum mechanics using object-oriented techniques. Comput. Phys. 1998, 12, 620–631. [Google Scholar] [CrossRef]
- Speranza, N.; Kidd, B.; Schultz, M.P.; Viola, I.M. Modelling of hull roughness. Ocean. Eng. 2019, 174, 31–42. [Google Scholar] [CrossRef]
- Keuning, L.J.A.; Katgert, M. A bare hull resistance prediction method derived from the results of The Delft Systematic Yacht Hull Series to higher speeds. In Proceedings of the International Conference Innovation in High Performance Sailing Yachts, Lorient, France, 29–30 May 2008. [Google Scholar]
- ITTC. Report of the Resistance and Flow Committee. In Proceedings of the 19th International Towing Tank Conference, Madrid, Spain, 16–22 September 1990; Volume 1, pp. 62–64. [Google Scholar]
- Lee, S.B.; Seok, W.; Rhee, S.H. Computational simulations of transitional flows around turbulence stimulators at low speeds. Int. J. Nav. Archit. Ocean. Eng. 2021, 13, 236–245. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Lpp [m] | Height [m] | Mass [kg] | Tc [m] | Aw [m2] | [m3] |
|---|---|---|---|---|---|---|
| Value | 7.8 | 0.6 | 1711 | 0.45 | 8.03 | 1.78 |
| Parameters | Cp[-] | Lwl[m] | Bwl[m] | Cm[-] | LCBfpp[m] | LCFfpp[m] |
| Value | 0.533 | 5.78 | 1.605 | 0.64 | 2.864 | 2.969 |
| Ship Parameters | Model Mass [kg] | Ballast [kg] | Towing Post Mass [kg] | Tc [m] | Aw [m2] | λ |
|---|---|---|---|---|---|---|
| Value | 7.878 | 19.813 | 0.3 | 0.1125 | 0.502 | 4 |
| Freshwater Parameters (by ITTC) | Temperature [°C] | Density [kg/m3] | Dynamic Viscosity [Pa·s] | Kinematic Viscosity [m2/s] | Vapour Pressure (MPa) | |
| Value | 20 | 998.2072 | 0.001002 | 1.0034 × 10−6 | 2.3393 × 10−3 |
| Boundary | Position | Boundary Condition |
|---|---|---|
| Inlet | 3Lpp in front of the ship | Velocity inlet |
| Outlet | 6Lpp in the back of the ship | Pressure outlet |
| Side | 3Lpp side of ship | XZ symmetry |
| Top/bottom | 3Lpp above/below the ship | XY symmetry |
| Nin 1 | Lpp | Wall |
| Ship Parameters | k [-] | Lwl [m] | Bwl [m] | Displacement [kgf] | Aw [m2] | Am [m2] | Correlation Allowance [-] |
|---|---|---|---|---|---|---|---|
| Value | 1.07 | 5.78 | 1.604 | 1834 | 8.035 | 0.58 | 0.002647 |
| Ship Parameters | LCBF [%] | Λ [-] | Cp [-] | CB [-] | Lwl/Bwl [-] | Tc [m] | Bwl/Tc [-] |
| Value | 0.477%Lwl | 0.662 | 0.533 | 0.426 | 3.606 | 0.45 | 3.5309 |
| Fn | a0 | a1 | a2 | a3 | a4 | a5 | a6 | a7 |
|---|---|---|---|---|---|---|---|---|
| 0.15 | −0.0005 | 0.003 | −0.0086 | −0.0015 | 0.0061 | 0.001 | 0.0001 | 0.0052 |
| 0.2 | −0.0003 | 0.0019 | −0.0064 | 0.007 | 0.0014 | 0.0013 | 0.0005 | −0.002 |
| 0.25 | −0.0002 | −0.0176 | 0.0031 | −0.0021 | −0.007 | 0.0148 | 0.0006 | −0.0043 |
| 0.3 | −0.0009 | 0.0016 | 0.0257 | −0.0285 | −0.036 | 0.0218 | 0.001 | −0.0172 |
| 0.35 | −0.0026 | −0.0567 | 0.0446 | −0.1091 | −0.0807 | 0.0904 | 0.0014 | −0.0098 |
| 0.4 | −0.0074 | −0.434 | −0.15 | 0.0273 | −0.1341 | 0.3578 | 0.0011 | 0.115 |
| Model-Size | Life-Size | |
|---|---|---|
| Towing tank | YES | YES |
| CFD | YES | YES |
| Holtrop–Mennen | NO | YES |
| DHSYS | NO | YES |
| Average Towing Tank Measurement | CFD | CFD—With Surface Roughness | |||||||
|---|---|---|---|---|---|---|---|---|---|
| v [knot] | Fn [-] | CTS [-] | RT [N] | CTS [-] | RT [N] | Standard Deviation [-] | CTS [-] | RT [N] | Standard Deviation [-] |
| 0.5 | 0.06 | 0.0058 | 0.15 | 0.0166 | 0.3 | 0.00168132 | 0.0165 | 0.32 | 0.005606479 |
| 1 | 0.135 | 0.0048 | 0.4 | 0.008 | 0.65 | 0.00206743 | 0.00915 | 0.69 | 0.003114555 |
| 1.5 | 0.211 | 0.0052 | 0.96 | 0.005 | 1.02 | 0.00290492 | 0.00628 | 1.06 | 0.000812613 |
| 2 | 0.271 | 0.0059 | 1.68 | 0.0055 | 1.6 | 0.00346523 | 0.00563 | 1.7 | 0.000296827 |
| 2.5 | 0.342 | 0.0077 | 3.7 | 0.007 | 3.5 | 0.00495888 | 0.00752 | 3.6 | 0.00010675 |
| 3 | 0.4 | 0.0153 | 10 | 0.0132 | 8.9 | 0.001338702 | 0.01366 | 9.27 | 0.001146144 |
| ITTC 1975 | CFD [%] | Holtrop–Mennen [%] | DHSYS | ||||
|---|---|---|---|---|---|---|---|
| Velocity [knots] | Extrapolated Force from * TT [N] | RT [N] | Difference to ITTC [%] | RT [N] | Difference to ITTC [%] | RT [N] | Difference to ITTC [%] |
| 0.5 | 1 | 2 | 100 | 2.1 | 64 | - | - |
| 1 | 5.1 | 5.5 | 7.8 | 7.8 | 52 | - | - |
| 2 | 16.8 | 18 | 7 | 17.8 | 5.7 | 15 | −11 |
| 3 | 41.7 | 43 | 3.1 | 63.1 | 51 | 31.5 | −24 |
| 4 | 91.4 | 84 | −8 | 82 | −10 | 65 | −28 |
| 5 | 196 | 191 | −2.9 | 280 | 42 | 156 | −20 |
| 6 | 623 | 594 | −4.6 | 722 | 15 | 442 | −29 |
| ITTC 1978 | CFD with Surface Roughness | |||||
|---|---|---|---|---|---|---|
| Velocity [knots] | RT [N] | RV [N] | RW [N] | RT [N]/Difference to ITTC Results [%] | RV [N]/ Difference to ITTC Results [%] | RW [N] /Difference to ITTC Results [%] |
| 0.5 | 2.1 | 1.42 | 0.3 | 3.55/47 | 2.55/80 | 1/42 |
| 1 | 6.1 | 4.6 | 1.5 | 7.5/22 | 4.95/6.6 | 2.55/69 |
| 2 | 22 | 17 | 5 | 23.2/5 | 16.7/−3 | 6.5/8 |
| 3 | 47 | 38 | 9 | 45/−5 | 34/−11 | 11/24 |
| 4 | 104 | 68 | 35 | 88/−15 | 59/−14 | 29/−17 |
| 5 | 218 | 107 | 110 | 205/−6 | 98/−8.6 | 107/−3.5 |
| 6 | 652 | 154 | 498 | 626/−4 | 141/−8 | 485/−2.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rudan, S.; Sviličić, Š.; Munić, I.; Cantilena, A.L.; Radić Rossi, I.; Lucchini, A. Comparison of Different Methods for Ancient Ship Calm Water Resistance Estimation. J. Mar. Sci. Eng. 2024, 12, 658. https://doi.org/10.3390/jmse12040658
Rudan S, Sviličić Š, Munić I, Cantilena AL, Radić Rossi I, Lucchini A. Comparison of Different Methods for Ancient Ship Calm Water Resistance Estimation. Journal of Marine Science and Engineering. 2024; 12(4):658. https://doi.org/10.3390/jmse12040658
Chicago/Turabian StyleRudan, Smiljko, Šimun Sviličić, Ivan Munić, Antonio Luca Cantilena, Irena Radić Rossi, and Alice Lucchini. 2024. "Comparison of Different Methods for Ancient Ship Calm Water Resistance Estimation" Journal of Marine Science and Engineering 12, no. 4: 658. https://doi.org/10.3390/jmse12040658
APA StyleRudan, S., Sviličić, Š., Munić, I., Cantilena, A. L., Radić Rossi, I., & Lucchini, A. (2024). Comparison of Different Methods for Ancient Ship Calm Water Resistance Estimation. Journal of Marine Science and Engineering, 12(4), 658. https://doi.org/10.3390/jmse12040658