
Design and Optimization of the Teardrop Buoy Driven by Ocean Thermal Energy


Abstract
:1. Introduction
2. Methods
2.1. Buoy Structural Design
2.2. Numerical Model
2.2.1. Turbulence Model
2.2.2. Boundary Conditions
2.2.3. Mesh-Independent Verification
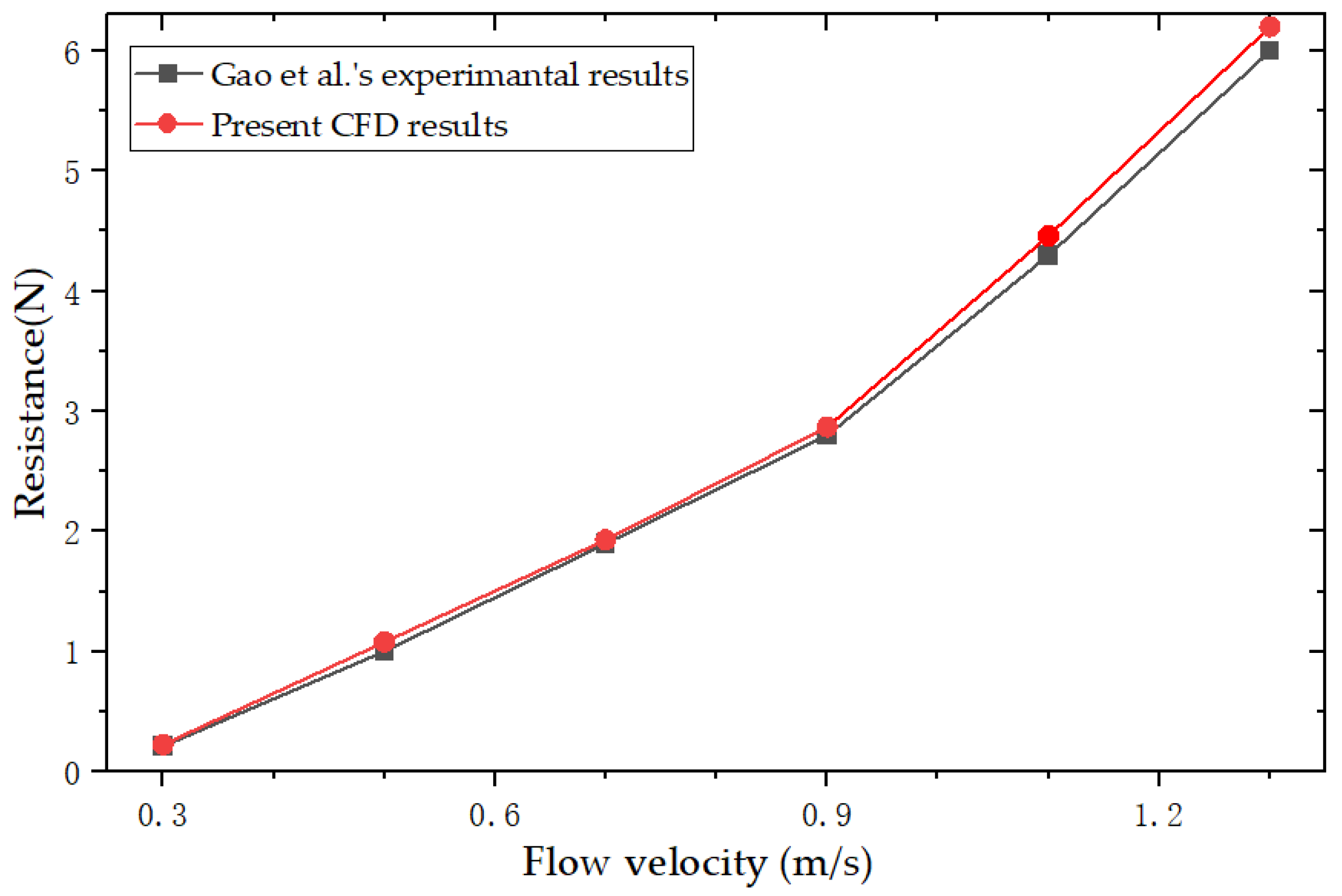
2.2.4. Numerical Simulation Validation
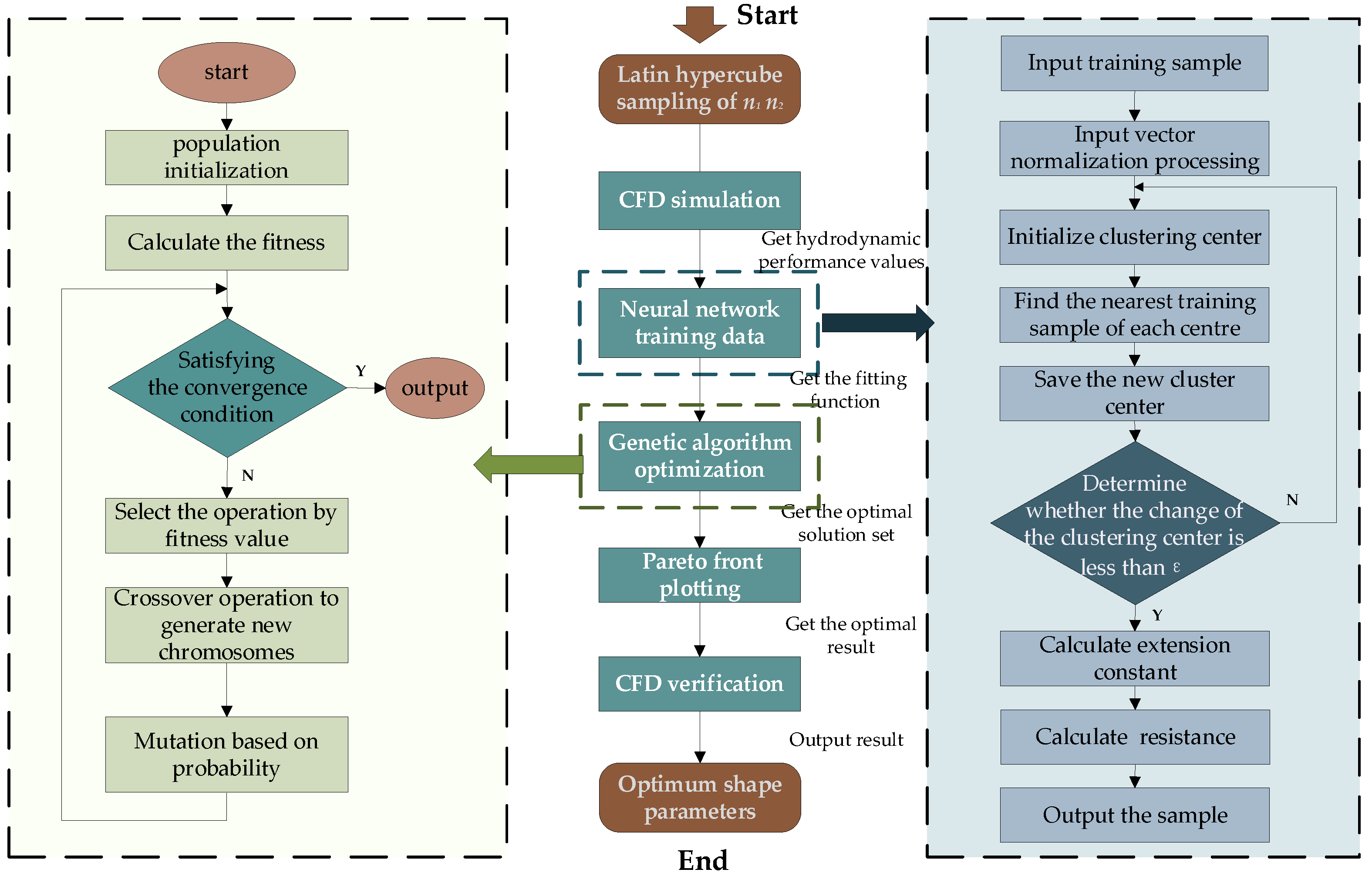
2.3. Optimization Scheme
2.3.1. Building Performance Analysis Functions with Neural Networks
| Algorithm 1: Neural network fitting the functional relationship between,and resistance. |
| INPUT: Training set D = {(, )} i = 1, 2, …30 |
| Learning rate η = 0.001 |
| Radial basis network based on (, ) REPEAT |
| FOR ALL (, ) IN D Calculate the error from the network parameters to the output layer; |
| Calculate the descending gradient of the network parameters based on the error; |
| Update the parameters according to the descending gradient; |
| END FOR |
| UNTIL mean square error < 0.01 |
| OUTPUT the functional relationship between , and resistance |
2.3.2. Genetic Algorithm
| Algorithm 2: Genetic algorithm for finding the minimum resistance value. |
| BEGIN |
| Initialize (0) t = 0; Initialize parameters |
| While (t < 500) do |
| Calculate individual fitness; |
| Select individuals from the population based on fitness; |
| Perform crossover and mutation of selected individuals; |
| Add manipulated individuals to the population; |
| UNTIL t = 500 evolutionary generations up to 500 |
| END |
| OUTPUT minimum |
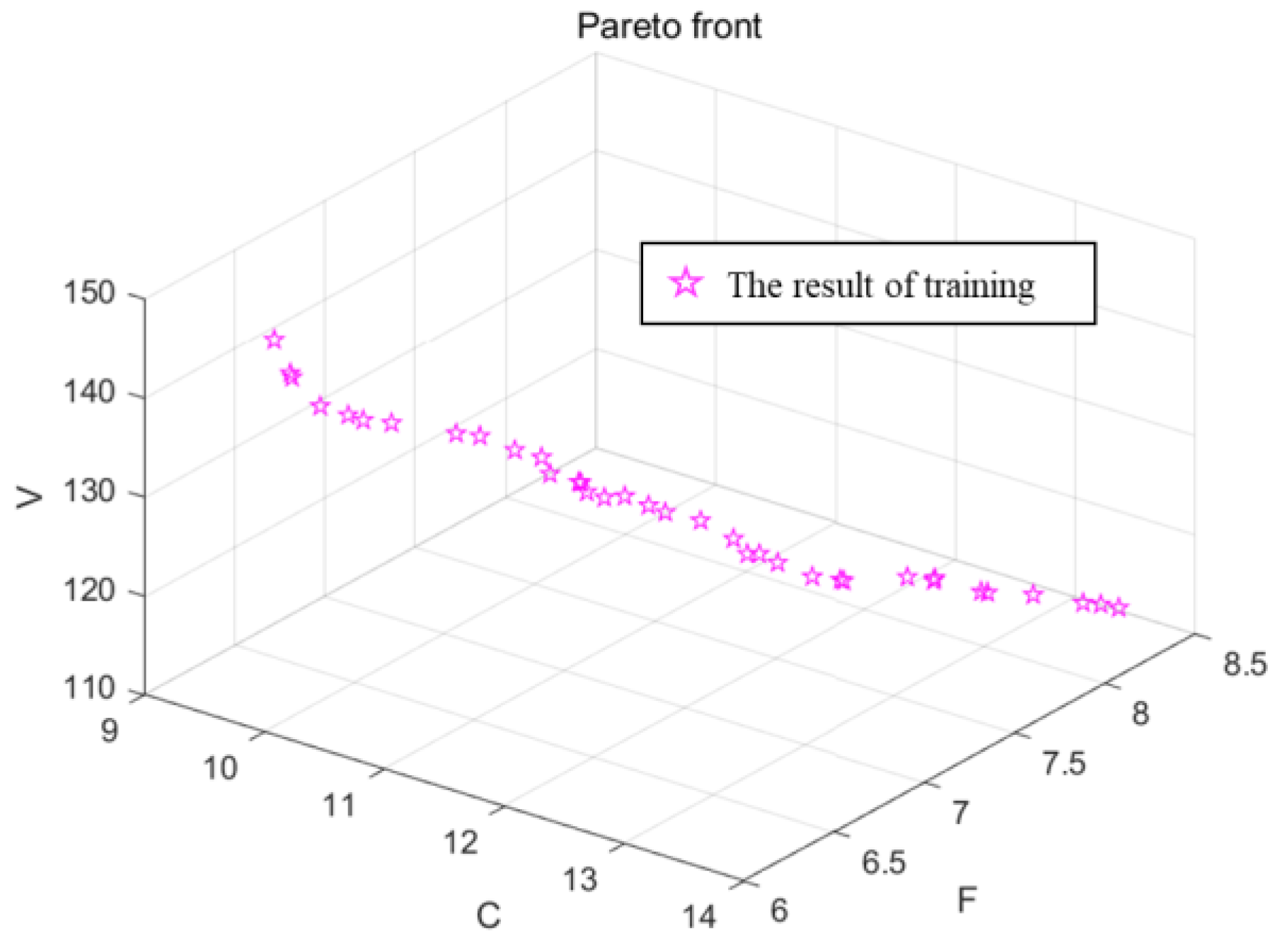
2.3.3. Pareto Optimal Solution
3. Results and Discussion
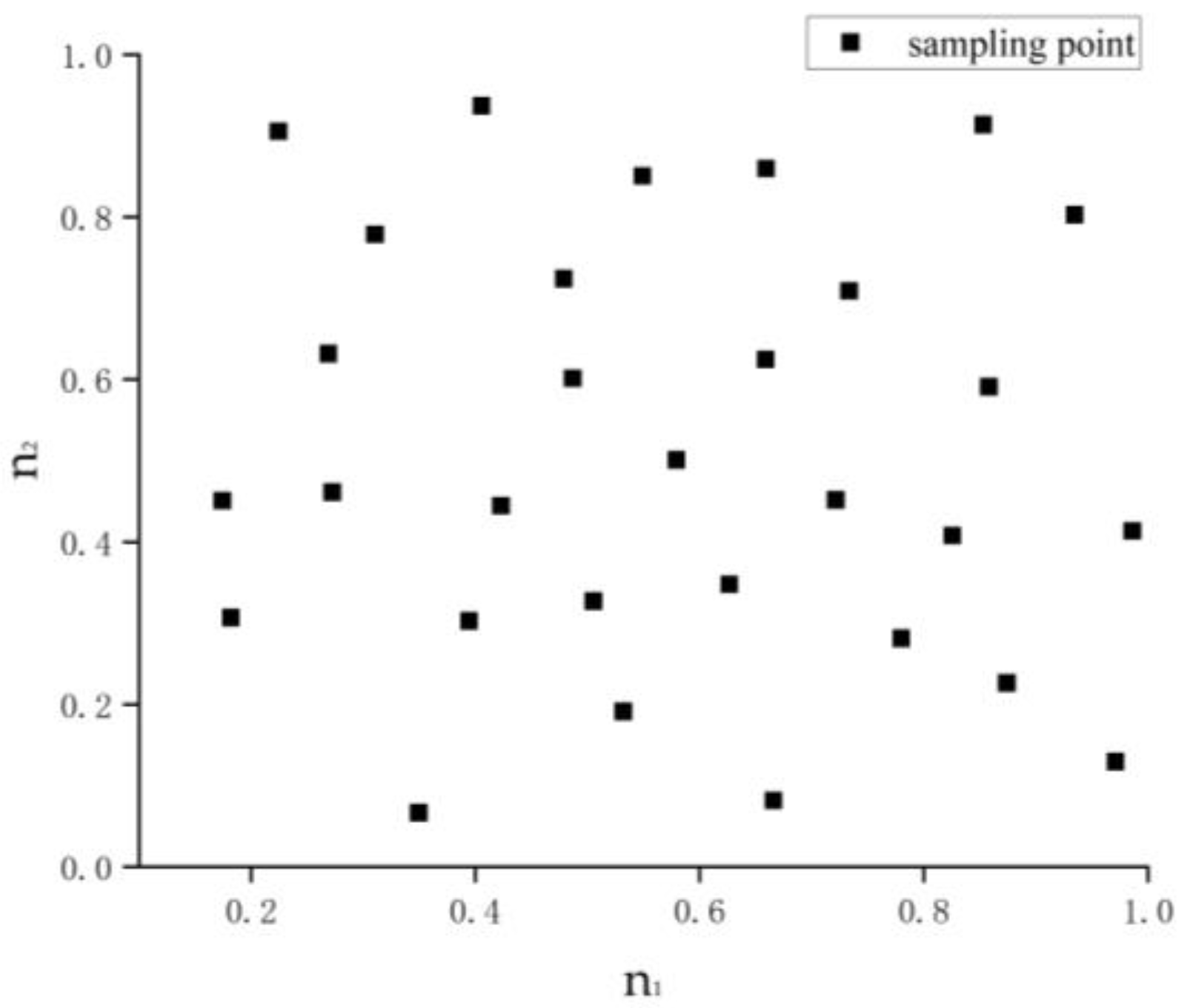
3.1. Sampling and CFD Simulation Results
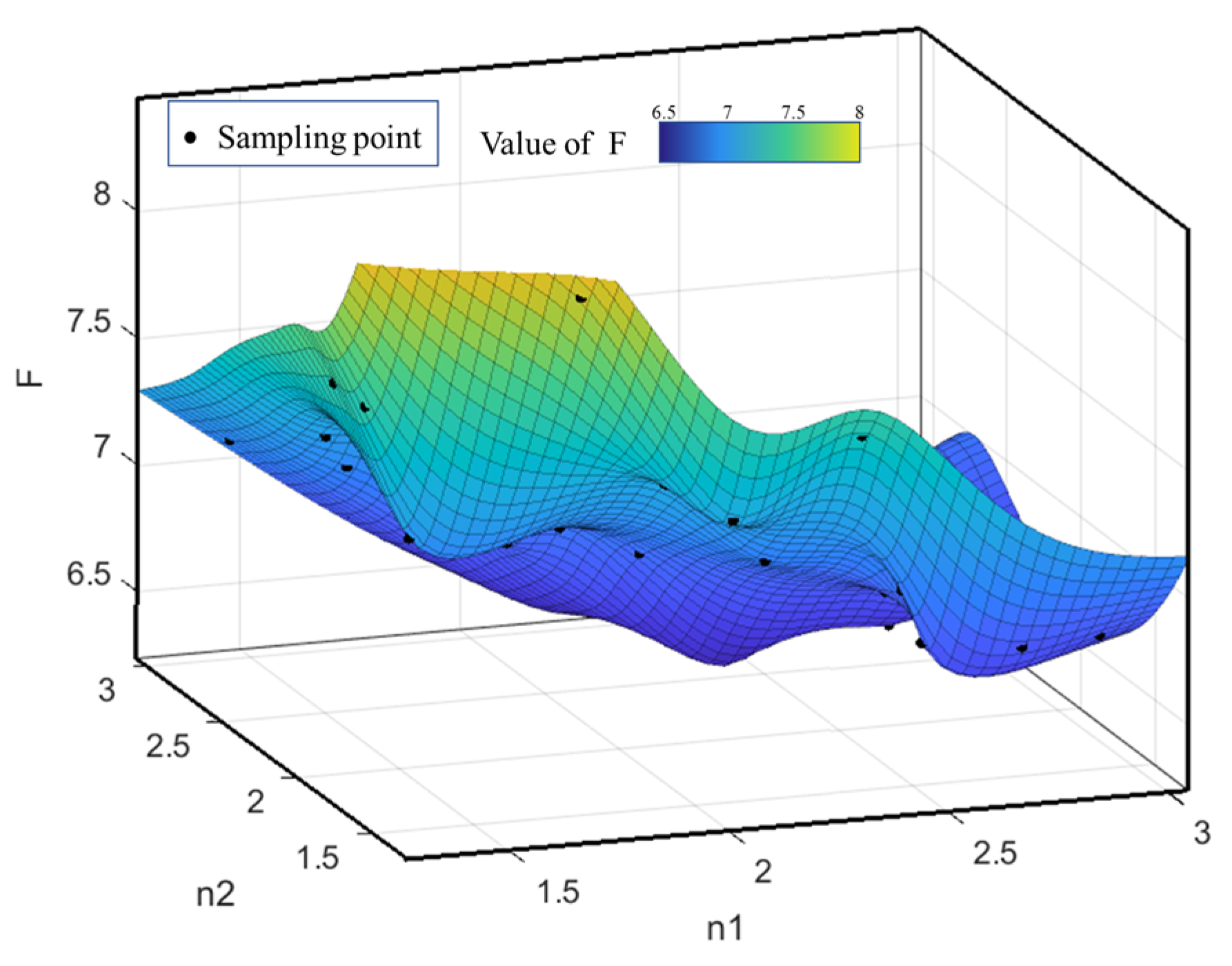
3.2. Neural Network Training Results
3.3. Optimal Solution Selection
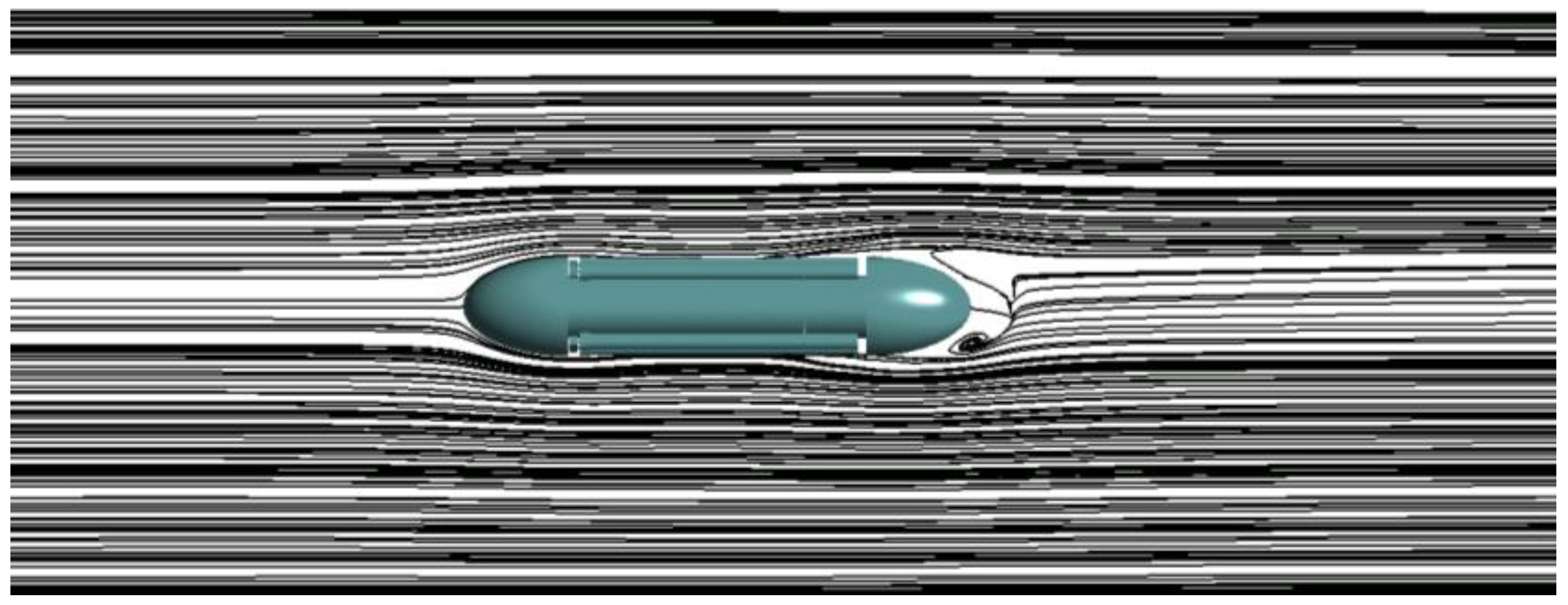
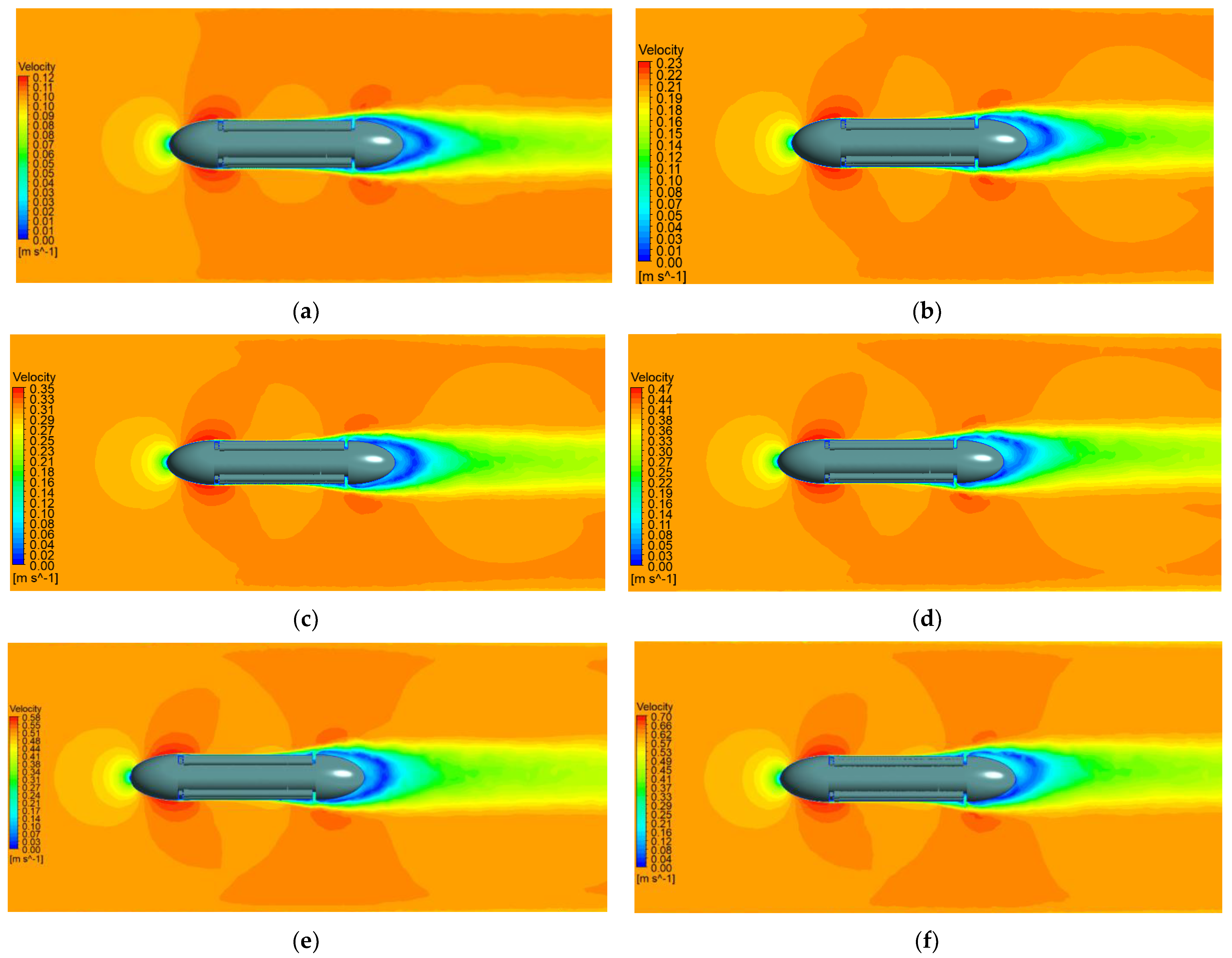
3.4. Simulation Verification
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xing, X.G.; Claustre, H. Toward deeper development of Biogeochemical-Argo floats. Atmos. Ocean. Sci. Lett. 2018, 11, 287–290. [Google Scholar] [CrossRef]
- Potiris, M.; Mamoutos, I.G.; Tragou, E.; Zervakis, V.; Kassis, D.; Ballas, D. Dense Water Formation in the North—Central Aegean Sea during Winter 2021–2022. J. Mar. Sci. Eng. 2024, 12, 221. [Google Scholar] [CrossRef]
- Hu, Y.; Shao, W.; Li, J.; Zhang, C.; Cheng, L.; Ji, Q. Short-Term Variations in Water Temperature of the Antarctic Surface Layer. J. Mar. Sci. Eng. 2022, 10, 287. [Google Scholar] [CrossRef]
- Abbas, S.M.; Alhassany, H.D.S. Review of enhancement for ocean thermal energy conversion system. J. Ocean. Eng. Sci. 2023, 8, 533–545. [Google Scholar] [CrossRef]
- Herrera, J.; Sierra, S. Ocean Thermal Energy Conversion and Other Uses of Deep Sea Water: A Review. J. Mar. Sci. Eng. 2021, 9, 356. [Google Scholar] [CrossRef]
- Barnard, A.H.; Mitchell, T.O. Biogeochemical monitoring of the oceans using autonomous profiling floats. Ocean News Technol. 2013, 19, 16–17. [Google Scholar]
- Roemmich, D.; Johnson, G.C.; Riser, S. The Argo Program: Observing the global ocean with profiling floats. Oceanography 2009, 22, 34–43. [Google Scholar] [CrossRef]
- Roemmich, D.; Sherman, J.T.; Davis, R.E. Deep SOLO: A full-depth profiling float for the Argo Program. J. Atmos. Ocean. Technol. 2019, 36, 1967–1981. [Google Scholar] [CrossRef]
- Petzrick, E.; Truman, J.; Fargher, H. Profiling from 6000 meter with the APEX-Deep float. In Proceedings of the Oceans 2013 MTS/IEEE San Diego, San Diego, CA, USA, 23–27 September 2013. [Google Scholar]
- Kobayashi, T.; Amaike, K.; Watanabe, K. Deep NINJA: A new float for deep ocean observation developed in Japan. In Proceedings of the 2011 IEEE Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 5–8 April 2011. [Google Scholar]
- Gould, W.J. From swallow floats to Argo—The development of neutrally buoyant floats. Deep Sea Res. Part II Top. Stud. Oceanogr. 2005, 52, 529–543. [Google Scholar] [CrossRef]
- André, X.; Moreau, B.; Reste, S.L. Argos-3 Satellite Communication System: Implementation on the Arvor Oceanographic Profiling Floats. J. Atmos. Ocean. Technol. 2015, 32, 1902–1914. [Google Scholar] [CrossRef]
- Yu, L.Z.; Zhang, S.Y.; Shang, H.M. Progress of China Argo float. Ocean. Technol. 2005, 2, 121–129. [Google Scholar]
- Sherman, J.; Davis, R.E.; Owens, W.B.; Valdes, J. The autonomous underwater glider “spray”. IEEE J. Ocean. Eng. 2001, 126, 437–446. [Google Scholar] [CrossRef]
- Davis, R.E.; Eriksen, C.C.; Jones, C.P. Autonomous buoyancy-driven underwater gliders. In The Technology and Applications of Autonomous Underwater Vehicles; Griffiths, G., Ed.; Taylor and Francis: London, UK, 2002; pp. 37–58. [Google Scholar]
- Webb, D.C.; Simonetti, P.J.; Jones, C.P. SLOCUM: An underwater glider propelled by environmental energy. IEEE J. Ocean. Eng. 2001, 26, 447–452. [Google Scholar] [CrossRef]
- Eriksen, C.C.; Osse, T.J.; Light, R.D. Seaglider: A long-range autonomous underwater vehicle for oceanographic research. IEEE J. Ocean. Eng. 2001, 126, 424–436. [Google Scholar] [CrossRef]
- Bertram, V.; Alvarez, A. Hydrodynamic Aspects of AUV Design 2006. Available online: https://www.researchgate.net/publication/228395786 (accessed on 5 April 2024).
- Ye, P.; Pan, G. Shape optimization of a blended-wing-body underwater glider using surrogate-based global optimization method IESGO-HSR. Sci. Prog. 2020, 103, 0036850420950144. [Google Scholar] [CrossRef] [PubMed]
- Sun, C.; Song, B.; Wang, P. Parametric geometric model and shape optimization of an underwater glider with blended-wing-body. Int. J. Nav. Arch. Ocean Eng. 2015, 7, 995–1006. [Google Scholar] [CrossRef]
- Fu, X.; Lei, L.; Yang, G.; Li, B. Multi-objective shape optimization of autonomous underwater glider based on fast elitist non-dominated sorting genetic algorithm. Ocean Eng. 2018, 157, 339–349. [Google Scholar] [CrossRef]
- Li, Z.; Liu, Y.; Guo, F.; Xue, G.; Li, S.; Li, X. Multi-objective optimization of the shell in autonomous intelligent Argo profiling float. Ocean Eng. 2019, 187, 106176. [Google Scholar] [CrossRef]
- Johnson, G.C.; Hosoda, S.; Jayne, S.R.; Oke, P.R.; Riser, S.C. Argo—Two decades: Global oceanography, revolutionized. Annu. Rev. Mar. Sci. 2022, 14, 379–403. [Google Scholar] [CrossRef]
- Liu, S.; Ong, M.C.; Obhrai, C. Influences of free surface jump conditions and different k−ω SST turbulence models on breaking wave modelling. Ocean. Eng. 2020, 217, 107746. [Google Scholar] [CrossRef]
- Gao, T.; Wang, Y.; Pang, Y. Hull shape optimization for autonomous underwater vehicles using CFD. Eng. Appl. Comp. Fluid 2016, 10, 601–609. [Google Scholar] [CrossRef]
- Yang, W.; Zhang, Y.; Wang, Y.; Liang, K.; Zhao, H.; Yang, A. Multi-Angle Reliability Evaluation of Grid-Connected Wind Farms with Energy Storage Based on Latin Hypercube Important Sampling. Energies 2023, 16, 6427. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Sign | Data |
|---|---|---|
| length of the buoy | L | 1940 mm |
| diameter of the buoy | D | 380 mm |
| length of deflector | l | 400 mm |
| radius of deflector | 190 mm | |
| length of heat exchanger tube | 1050 mm | |
| length of shell | 1400 mm | |
| diameter of shell | 246 mm |
| Models | Total Number of Elements | Drag (Fr) | Drag (Cd) |
|---|---|---|---|
| 1 | 162.0 w | 8.23 N | 13.11 |
| 2 | 210.8 w | 7.52 N | 11.94 |
| 3 | 321.1 w | 7.05 N | 11.23 |
| 4 | 605.5 w | 6.98 N | 11.19 |
| Velocity | Drag (Fr) | Drag Coefficient (Cd) |
|---|---|---|
| 0.1 | 0.26 N | 0.43 |
| 0.2 | 1.08 N | 1.77 |
| 0.3 | 2.45 N | 4.01 |
| 0.4 | 4.50 N | 7.34 |
| 0.5 | 7.05 N | 11.23 |
| Sample | Fr (N) | |||
|---|---|---|---|---|
| 1 | 2.748 | 1.498 | 6.975 | 11.388 |
| 2 | 2.869 | 2.766 | 6.595 | 10.767 |
| 3 | 2.253 | 1.765 | 6.797 | 11.098 |
| 4 | 2.716 | 2.300 | 6.474 | 10.570 |
| 5 | 1.349 | 1.992 | 7.495 | 12.237 |
| 6 | 2.319 | 2.891 | 6.727 | 10.983 |
| 7 | 2.064 | 1.421 | 7.621 | 12.442 |
| 8 | 2.560 | 1.619 | 6.916 | 11.292 |
| 9 | 1.974 | 2.323 | 6.894 | 11.255 |
| 10 | 2.198 | 2.871 | 6.684 | 10.912 |
| Number | Fr (N) | V (L) | |||
|---|---|---|---|---|---|
| 1 | 2.963 | 1.854 | 6.360 | 10.308 | 137.994 |
| 2 | 2.584 | 2.418 | 6.401 | 10.457 | 141.169 |
| 3 | 2.232 | 0.853 | 7.672 | 12.589 | 122.543 |
| 4 | 2.707 | 1.239 | 7.157 | 11.494 | 130.047 |
| 5 | 2.569 | 1.565 | 7.013 | 11.421 | 132.108 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, D.; Li, S.; Shi, W.; Zhou, Z.; Guo, F. Design and Optimization of the Teardrop Buoy Driven by Ocean Thermal Energy. J. Mar. Sci. Eng. 2024, 12, 661. https://doi.org/10.3390/jmse12040661
Zhao D, Li S, Shi W, Zhou Z, Guo F. Design and Optimization of the Teardrop Buoy Driven by Ocean Thermal Energy. Journal of Marine Science and Engineering. 2024; 12(4):661. https://doi.org/10.3390/jmse12040661
Chicago/Turabian StyleZhao, Danyao, Shizhen Li, Wenzhuo Shi, Zhengtong Zhou, and Fen Guo. 2024. "Design and Optimization of the Teardrop Buoy Driven by Ocean Thermal Energy" Journal of Marine Science and Engineering 12, no. 4: 661. https://doi.org/10.3390/jmse12040661
APA StyleZhao, D., Li, S., Shi, W., Zhou, Z., & Guo, F. (2024). Design and Optimization of the Teardrop Buoy Driven by Ocean Thermal Energy. Journal of Marine Science and Engineering, 12(4), 661. https://doi.org/10.3390/jmse12040661