
On Peak Mooring Loads and the Influence of Environmental Conditions for Marine Energy Converters




Abstract
:1. Introduction
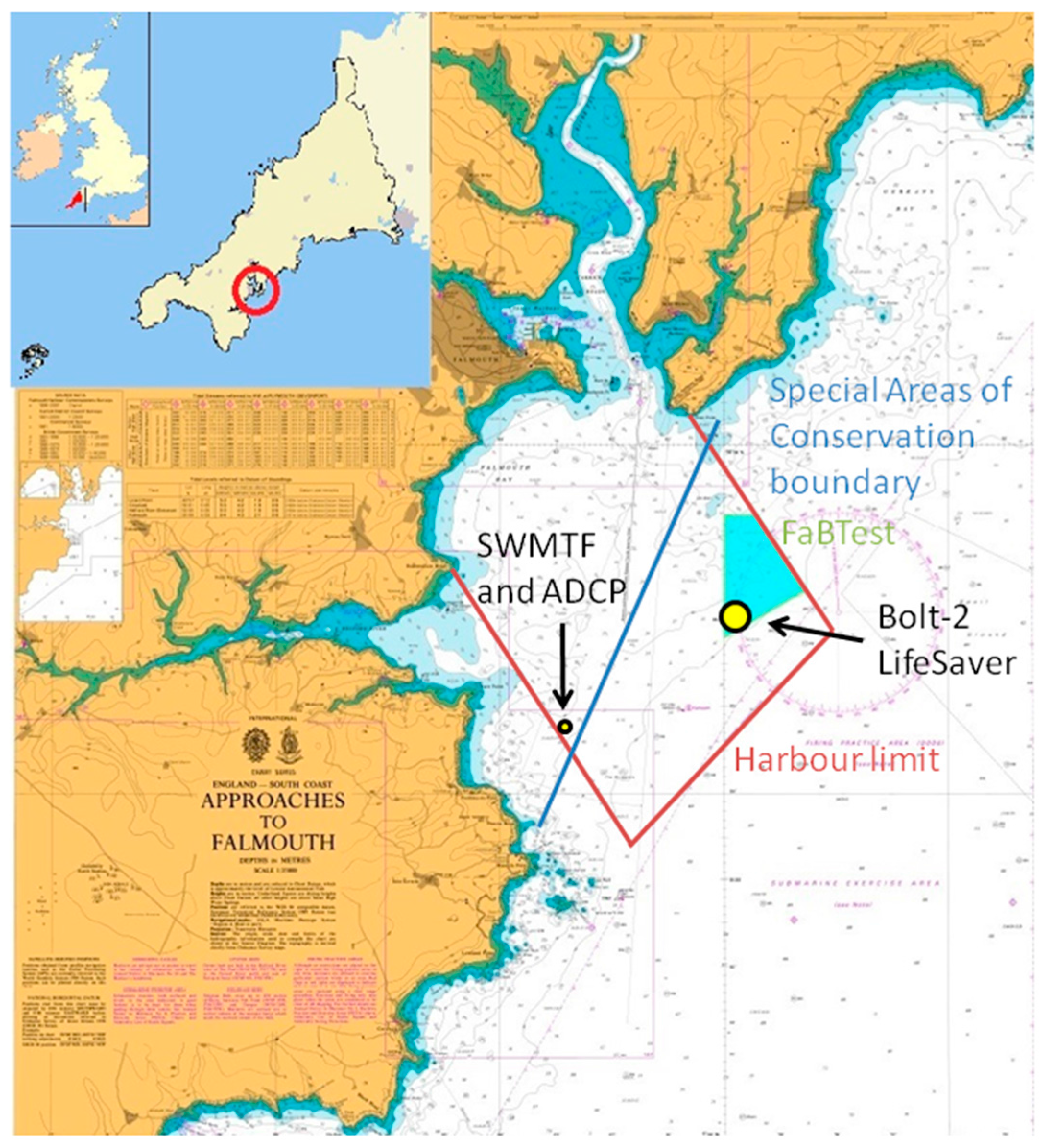
2. Mooring Sea Trial Facilities
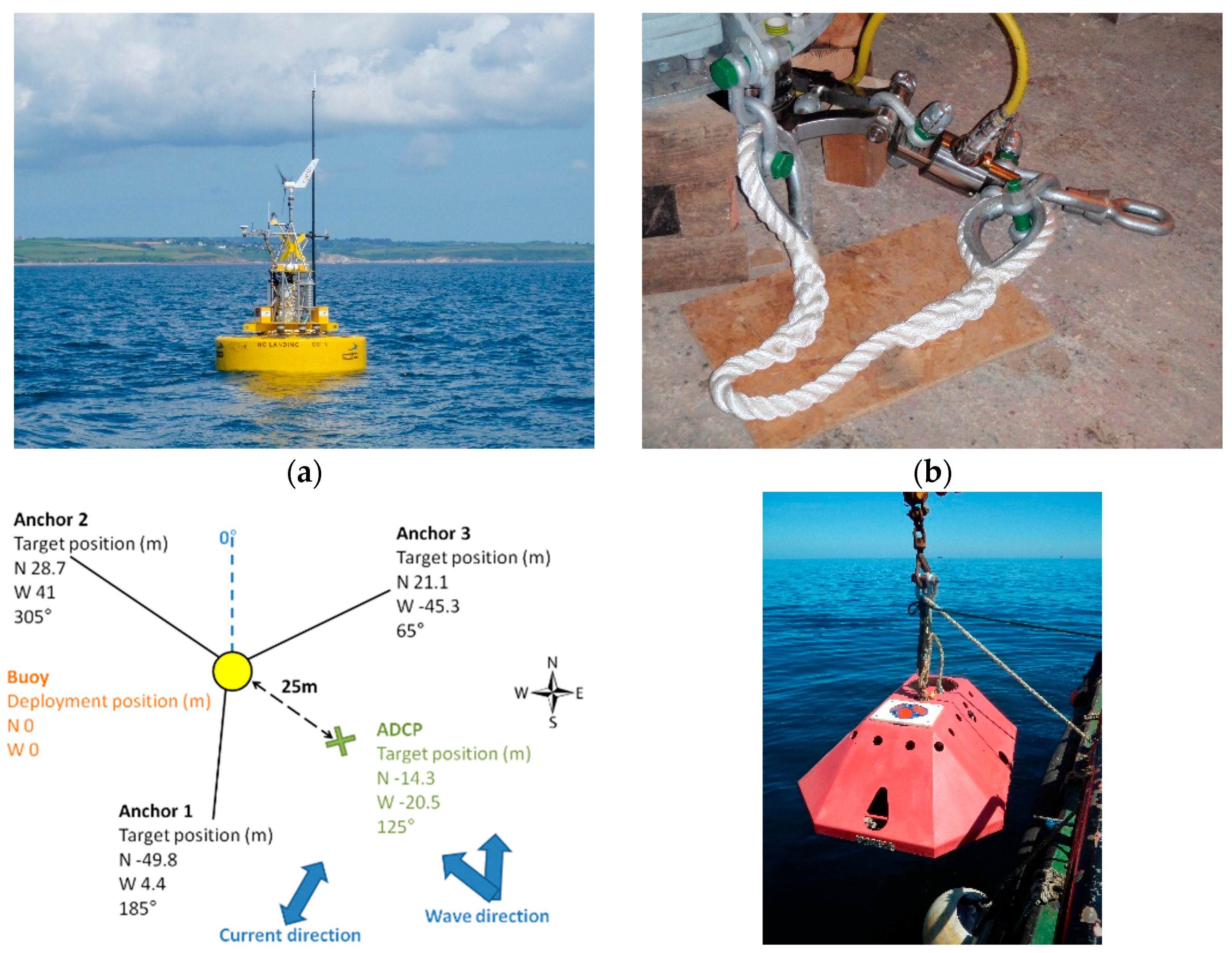
2.1. South West Mooring Test Facility
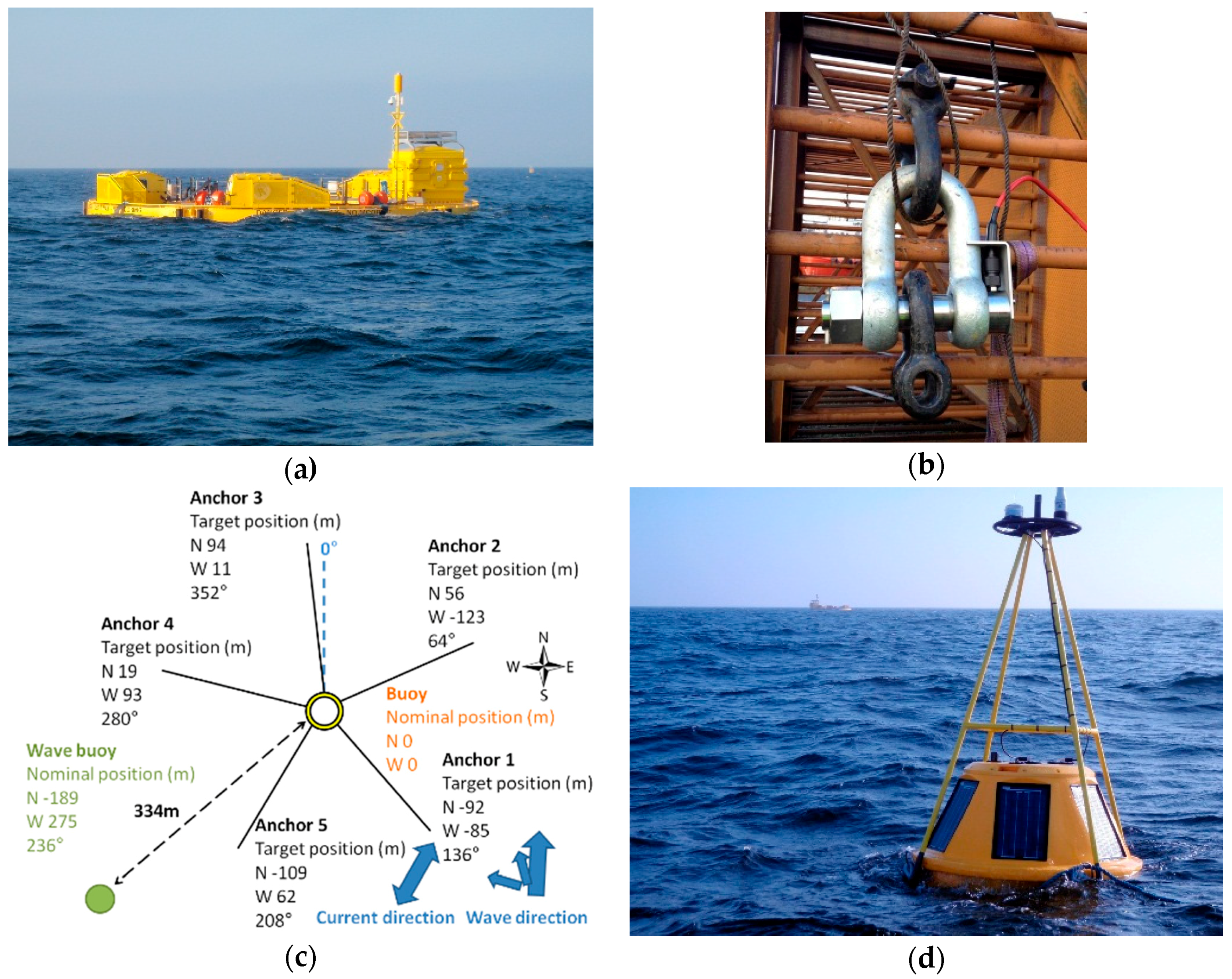
2.2. FaBTest: Bolt-2 Lifesaver Device
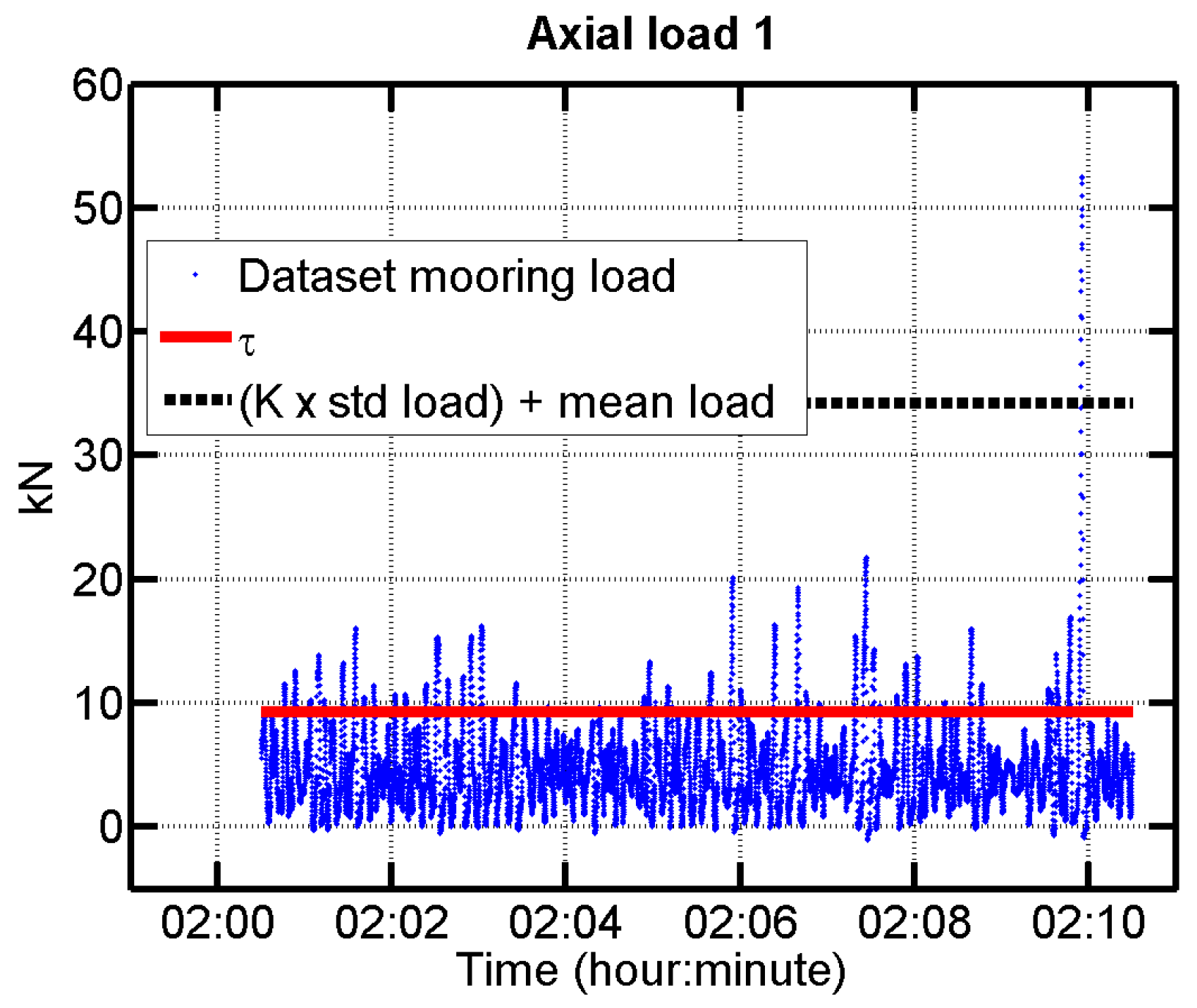
3. Methodology to Detect Peak Mooring Loads
- Geometric non-linearity that is associated with changes in the shape of the mooring line caused by vertical force components;
- Non-linear stretching of synthetic ropes;
- Non-linear seabed friction;
- Non-linear drag of the mooring line, which may cause snap loads.
4. Environmental Conditions Associated with Peak Mooring Loads
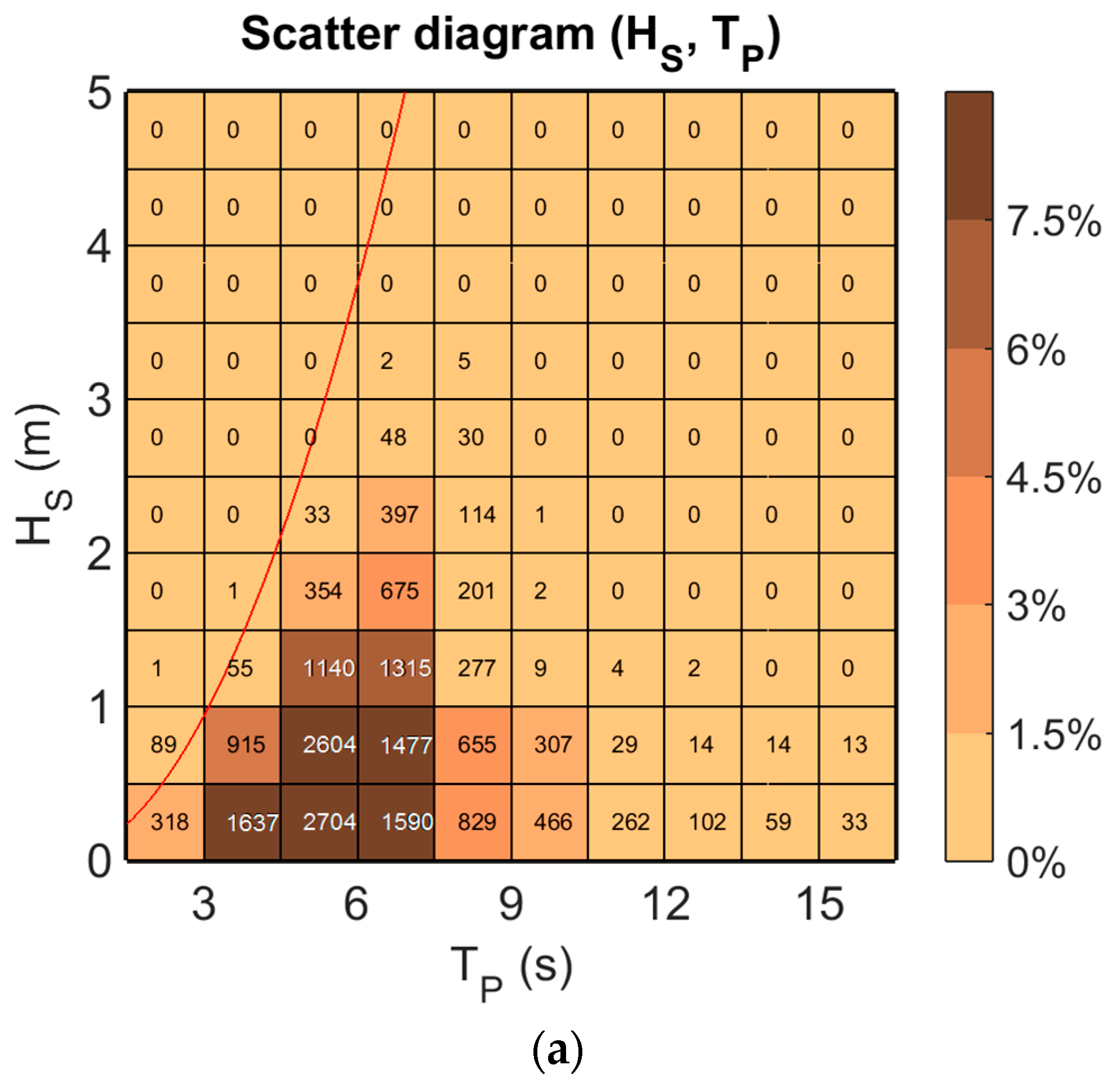
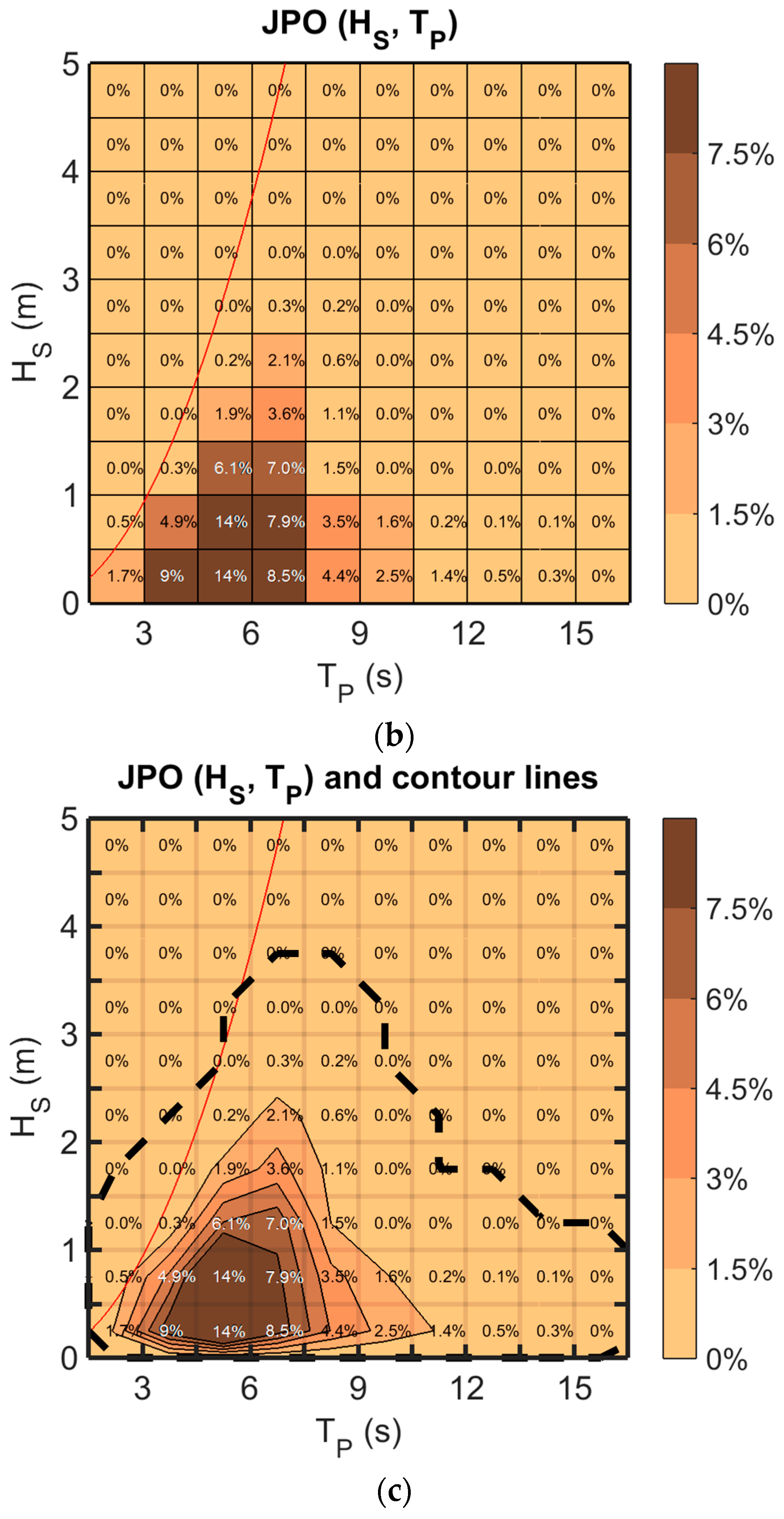
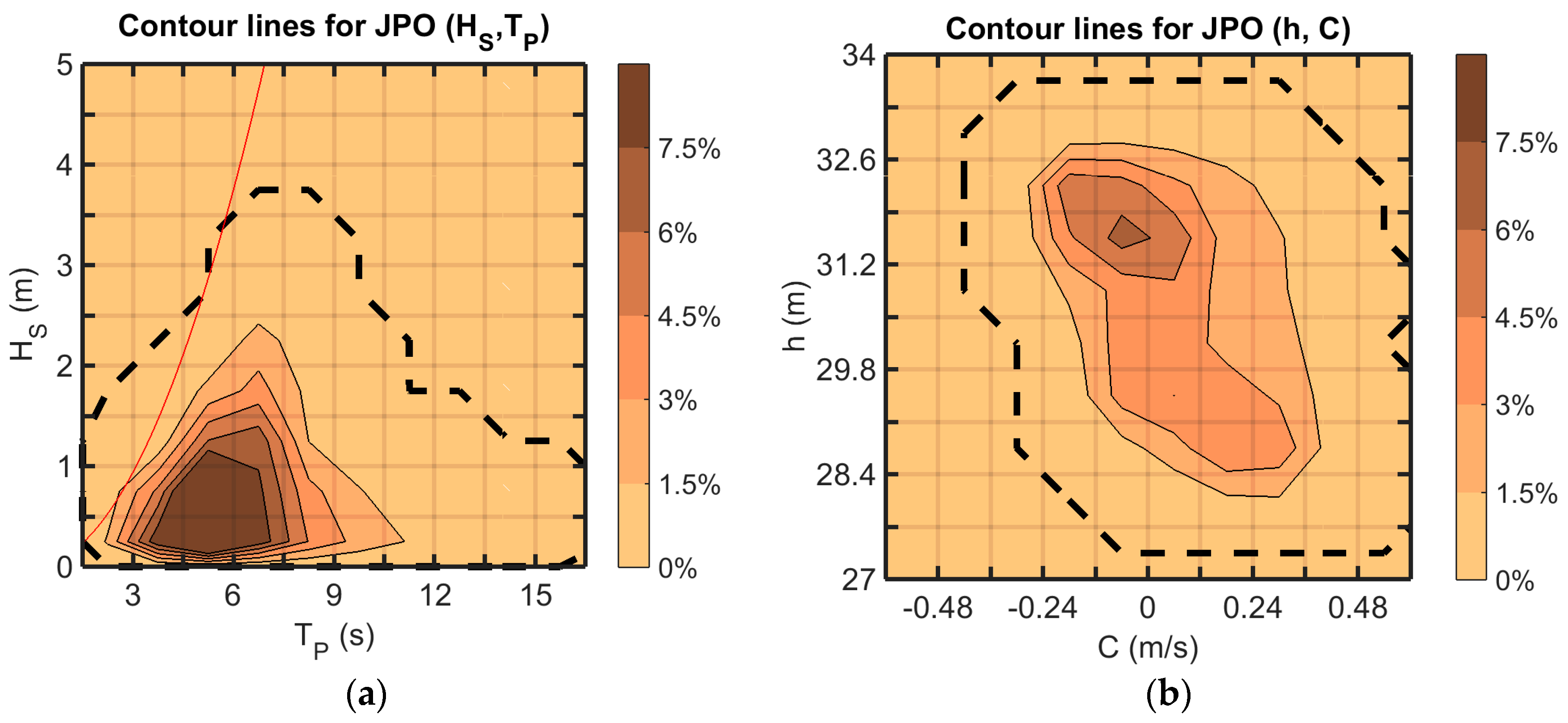
4.1. Assessment of the Site Environmental Conditions
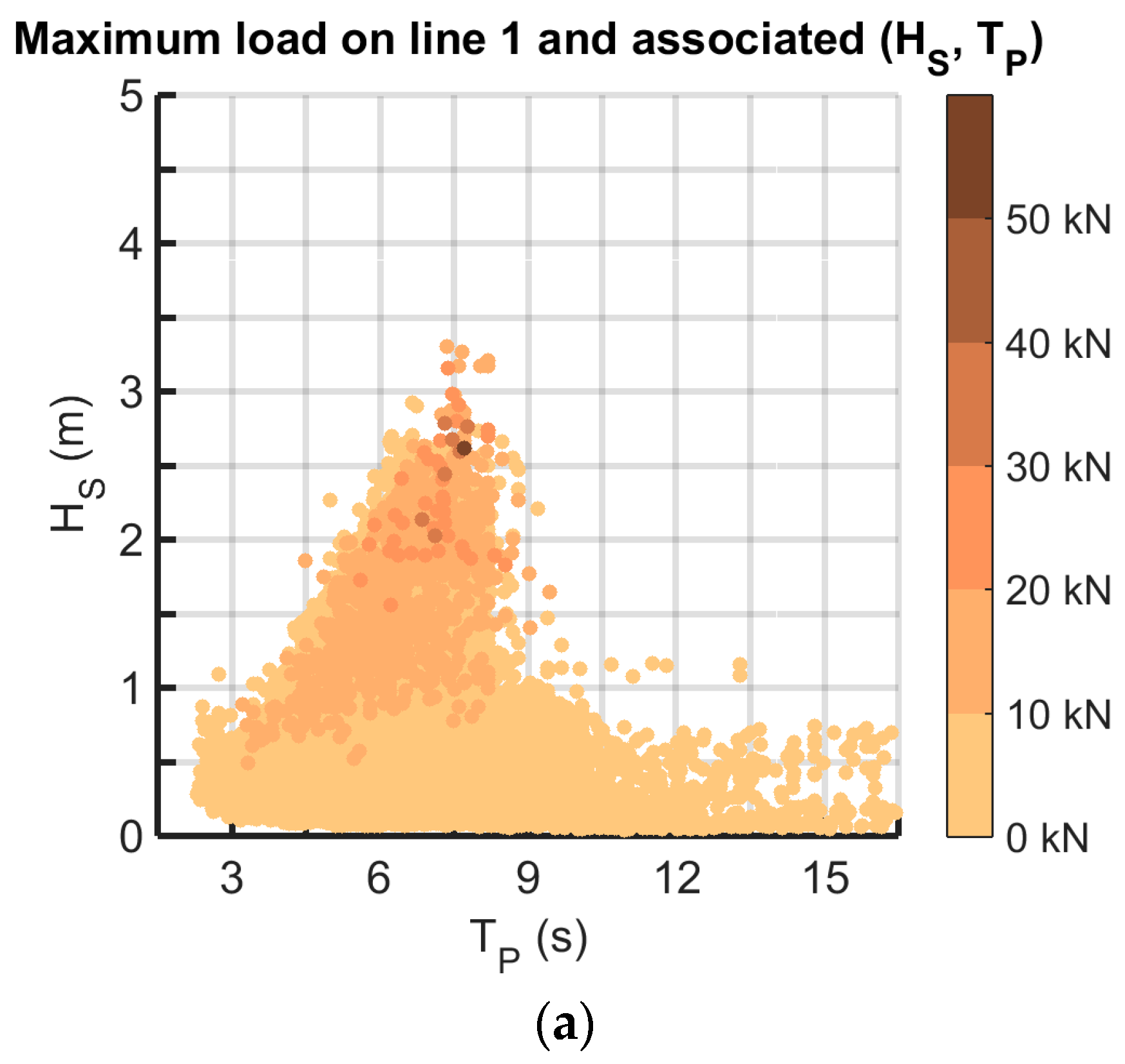
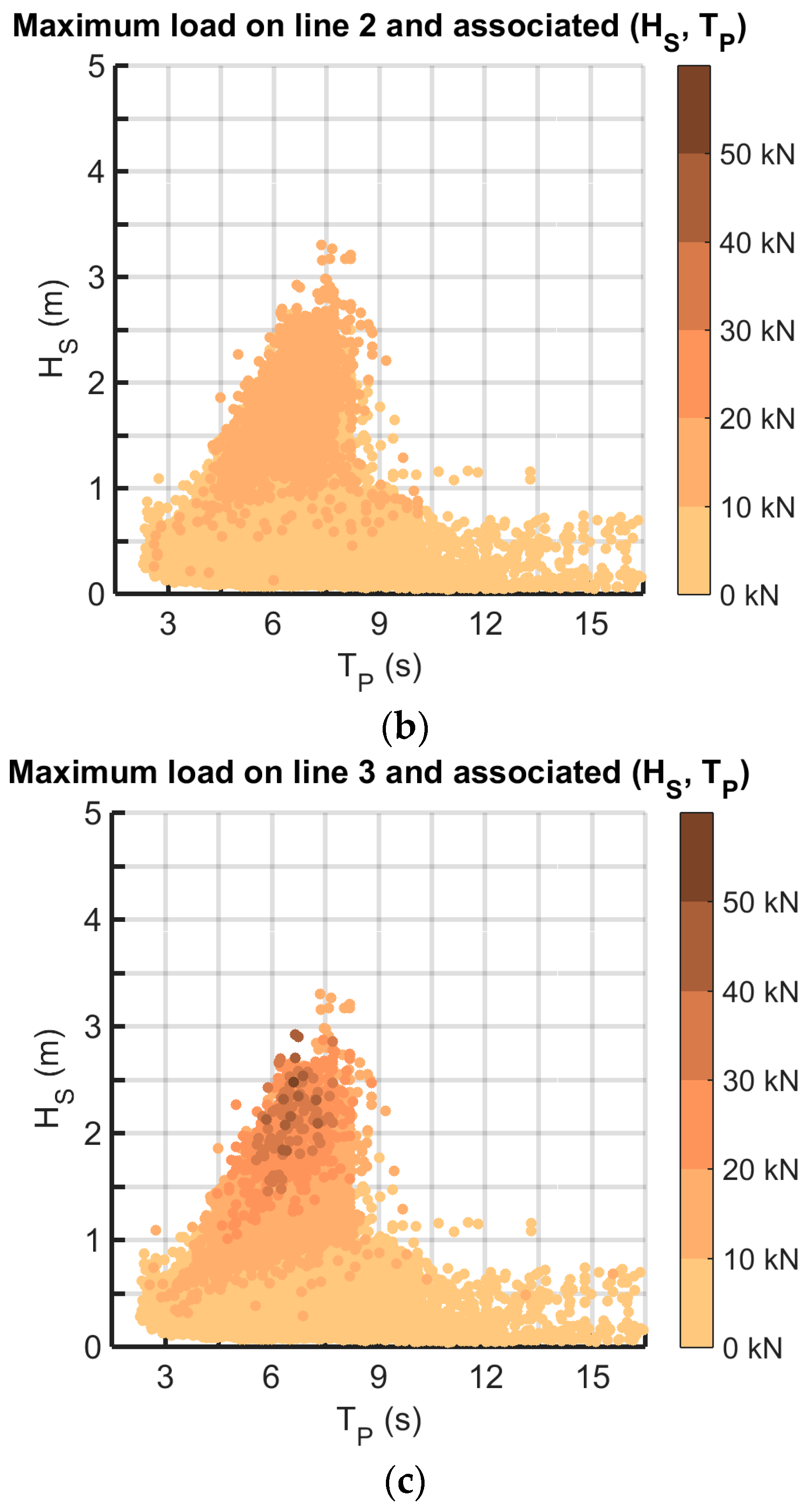
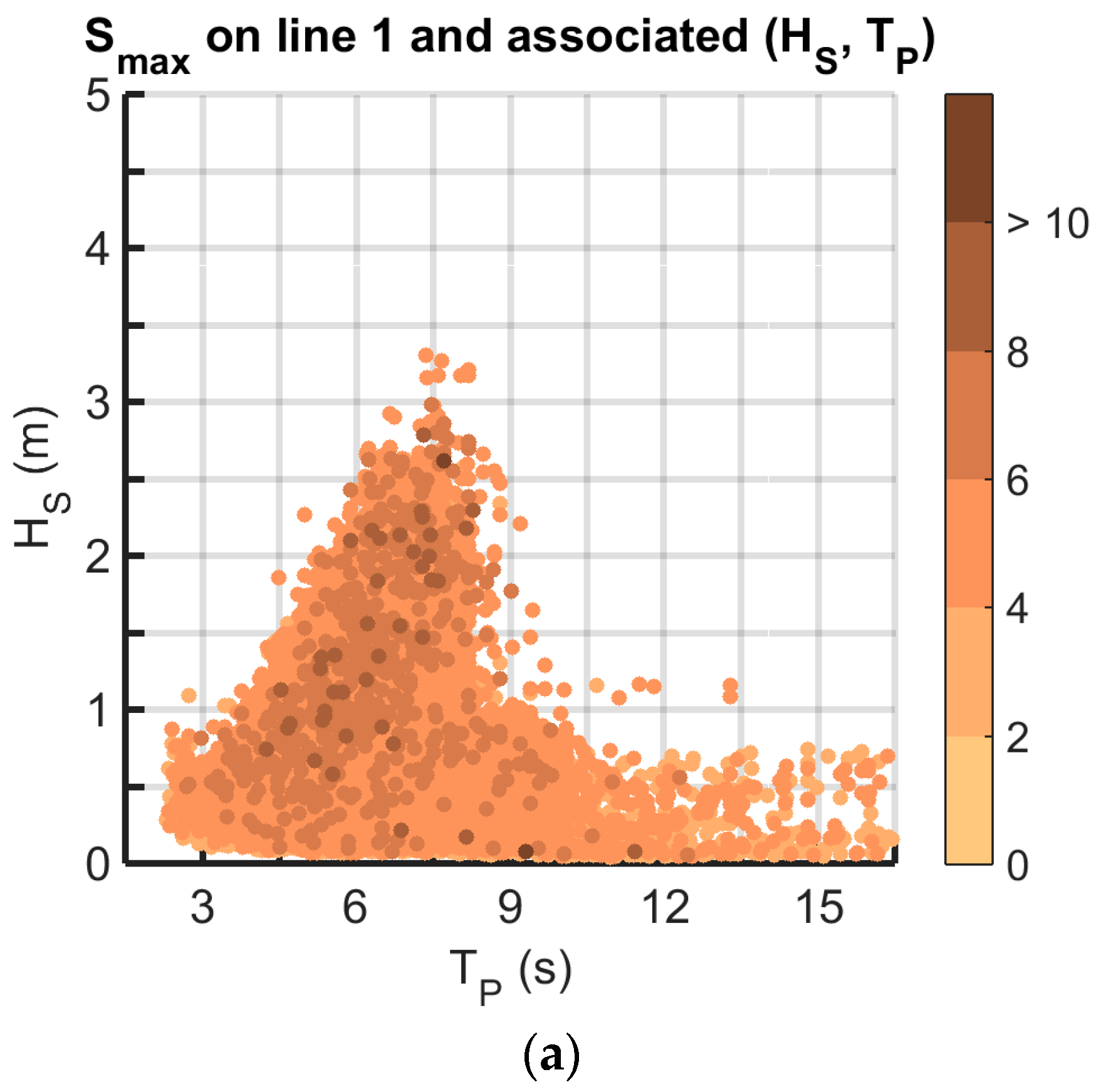
4.2. Analysis of Environmental Conditions Associated with Peak Mooring Loads
5. Field Test Results
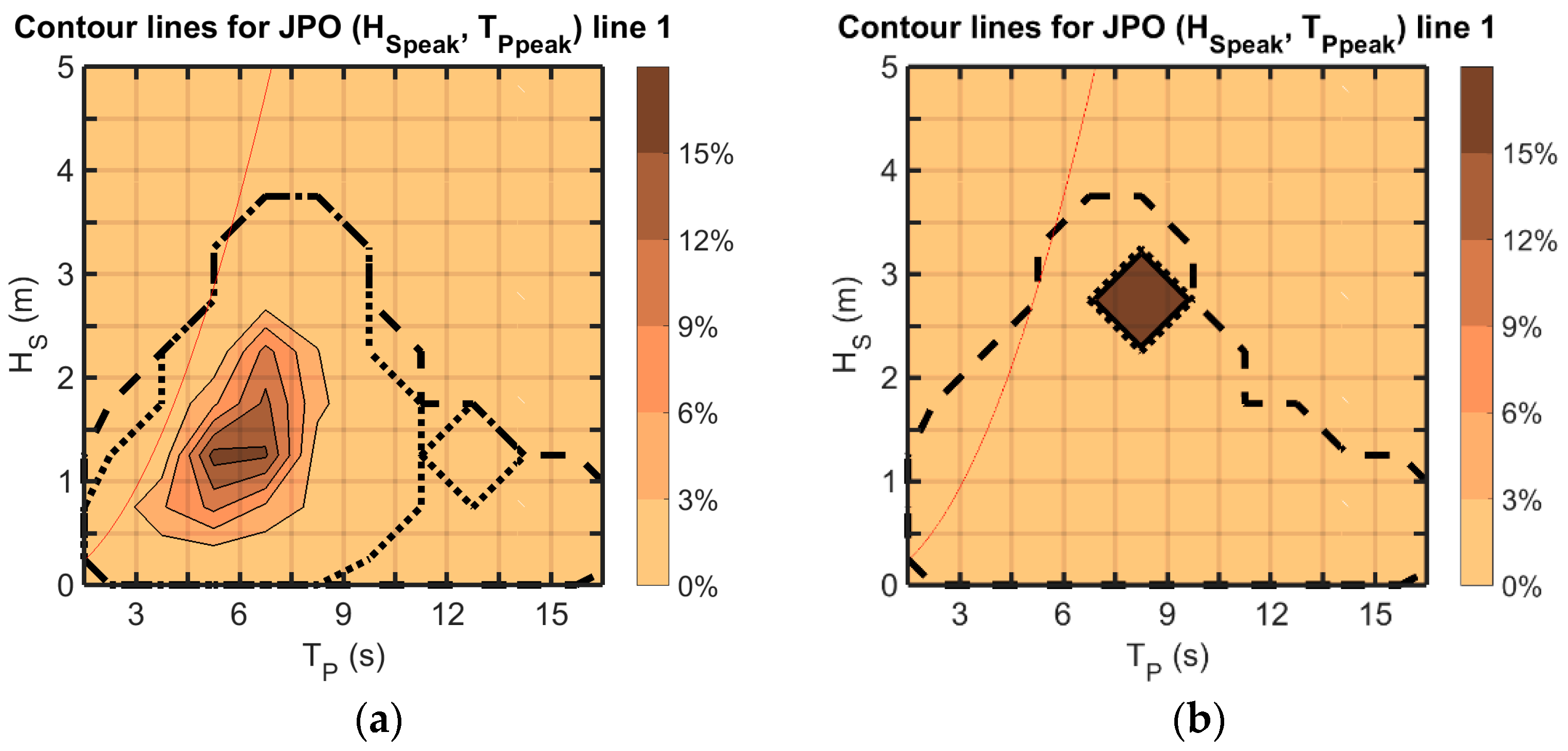
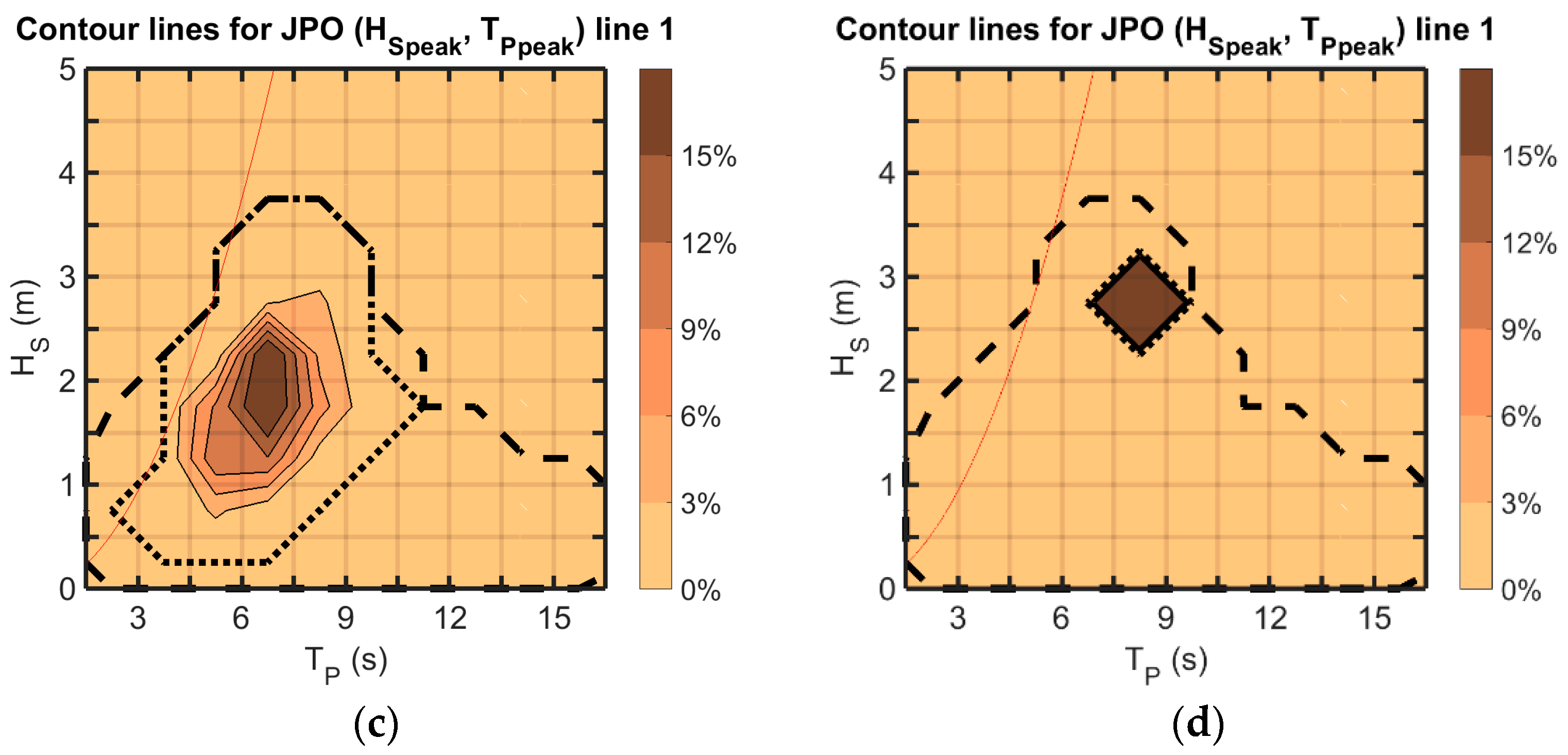
5.1. South West Mooring Test Facility
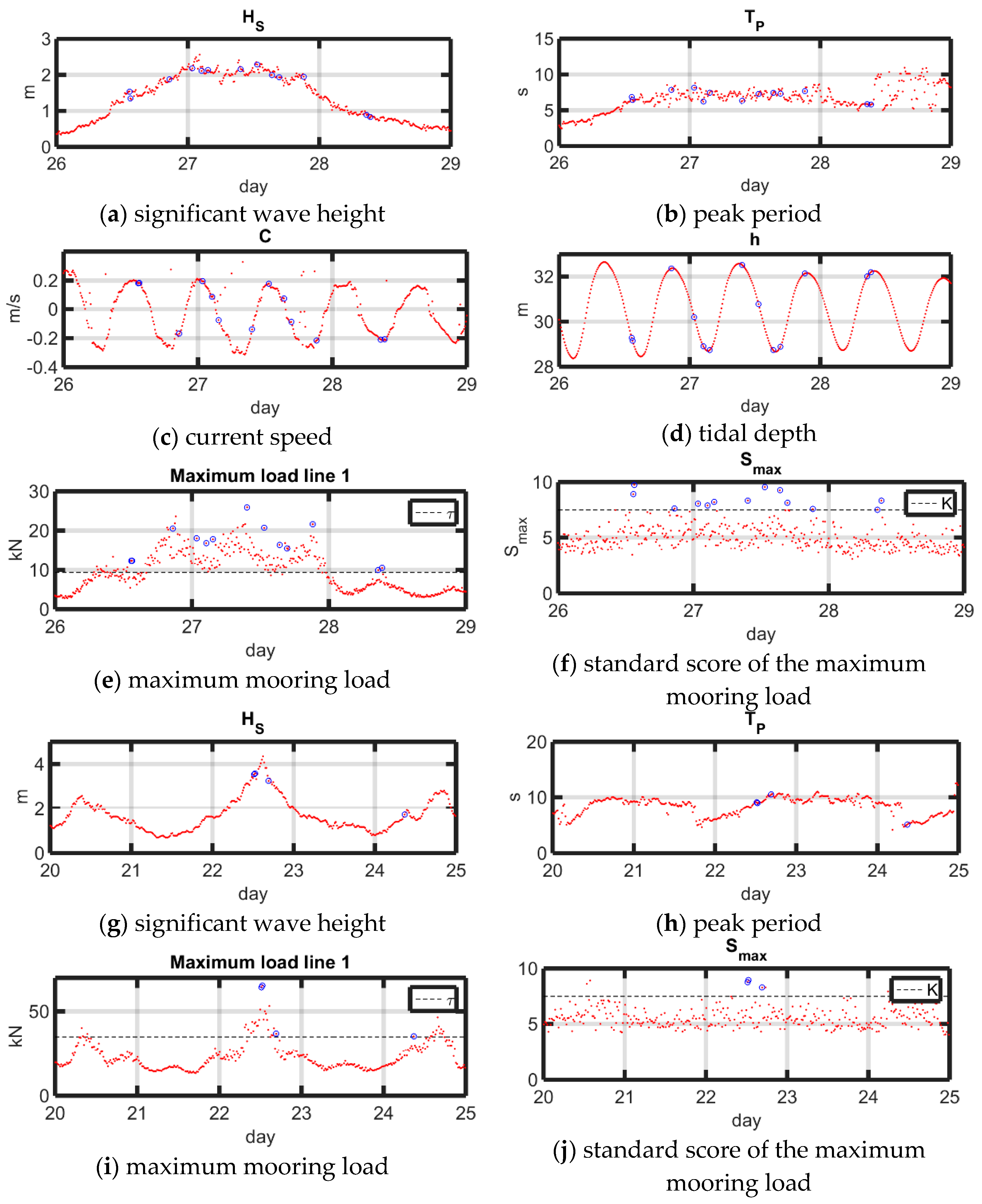
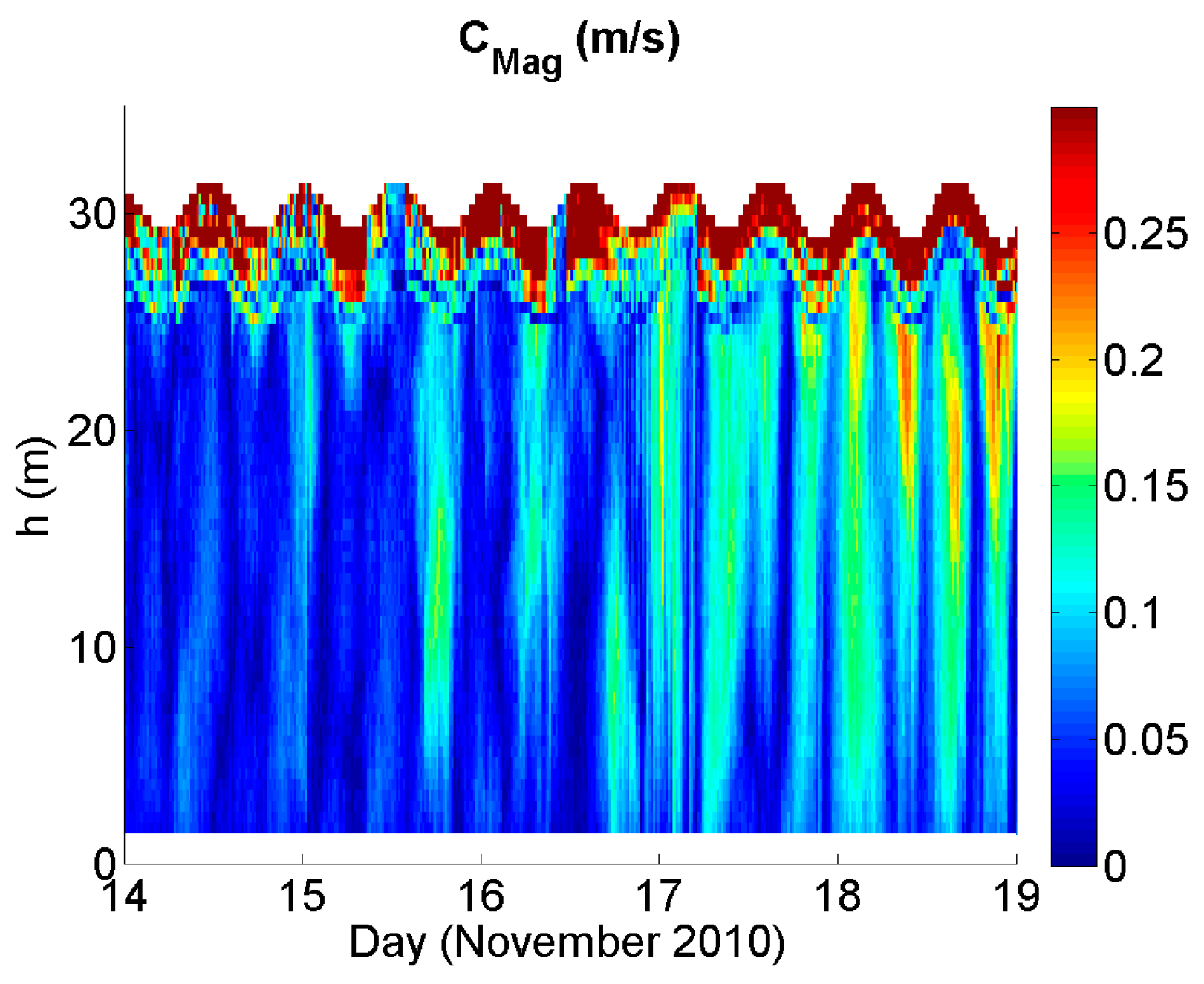
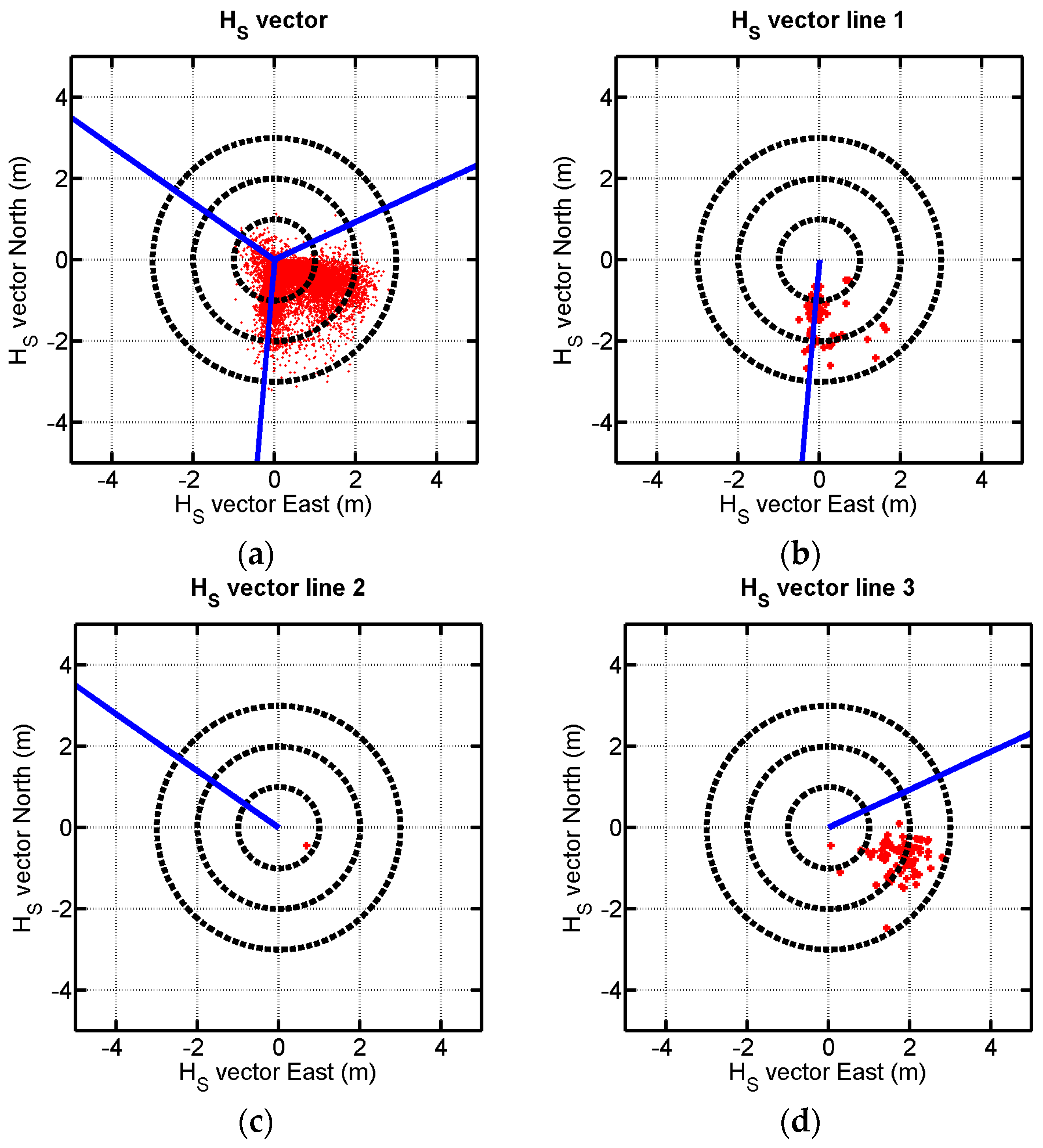
5.1.1. Environment
5.1.2. Peak Mooring Loads
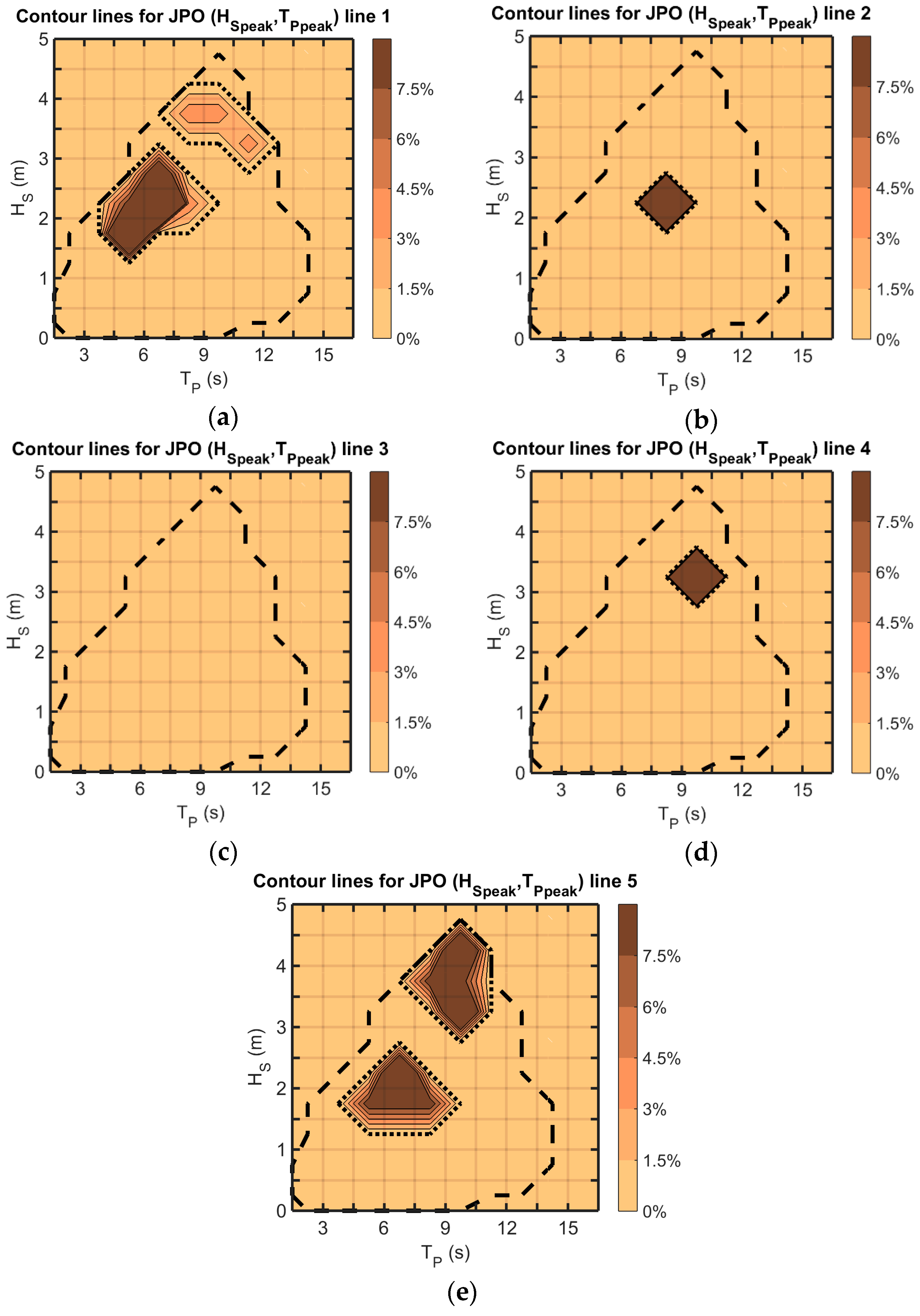
5.2. FaBTest: Bolt-2 Lifesaver Device
5.2.1. Environment
5.2.2. Peak Mooring Loads
6. Discussion
- (a)
- An increase of the pre-tension of the mooring system would reduce the number of occurrences of peak mooring loads, as suggested by the semi-taut configuration discussed by Johanning and Smith [21]. However, this should be balanced with the power production for a WEC device. A high pre-tension would reduce the motion of the floating structure and consequently will have an effect on the power production in the case of a motion-dependent wave energy device. With a semi-taut configuration, it would also be difficult to achieve a sufficiently high pre-tension for low tide, while achieving a reasonably low pre-tension for high tide.
- (b)
- An increase in the number of lines can also reduce the number of peak mooring loads. The results from the Bolt-2 Lifesaver mooring with five mooring lines cannot be directly compared to the SWMTF mooring with three mooring lines, as the period and duration of tests were different, and the floating structures are considerably different in size and mass. However, this solution is not cost effective because of the cost of the extra mooring lines, and it may also affect the power production by restraining the motion of the floating structure.
- (c)
- If the installation site has a limited number of wave directions and a low number of mooring lines, the mooring system can be oriented to avoid the worst wave climate. However, the seabed properties also have to be considered. The presented installations use drag embedment anchors, which require a soft soil, e.g., sand or clay.
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Clément, A.; McCullen, P.; Falcao, A.; Fiorentino, A.; Gardner, F.; Hammarlund, K.; Lemonis, G.; Lewis, T.; Nielsen, K.; Petroncini, S.; et al. Wave energy in Europe: Current status and perspectives. Renew. Sustain. Energy Rev. 2002, 6, 405–431. [Google Scholar] [CrossRef]
- Fitzgerald, J. Position Mooring of Wave Energy Converters. Ph.D. Thesis, Chalmers University of Technology, Göteborg, Sweden, 2009. [Google Scholar]
- Harris, R.E.; Johanning, L.; Wolfram, J. Mooring systems for wave energy converters: A review of design issues and choices. In Proceedings of the 3rd International Conference on Marine Renewable Energy (MAREC), Blyth, UK, 7–9 July 2004.
- Harnois, V.; Parish, D.; Johanning, L. Physical measurement of a slow drag of a drag embedment anchor during sea trials. In Proceedings of the International Conference on Ocean Energy (ICOE), Dublin, Ireland, 17–19 October 2012.
- Johanning, L.; Spargo, A.W.; Parish, D. Large scale mooring test facility—A technical note. In Proceedings of the 2nd International Conference on Ocean Energy (ICOE), Brest, France, 15–17 October 2008.
- Thies, P.R.; Johanning, L.; Harnois, V.; Smith, H.C.M.; Parish, D.N. Mooring line fatigue damage evaluation for floating marine energy converters: Field measurements and prediction. Renew. Energy 2013, 63, 133–144. [Google Scholar] [CrossRef]
- Harnois, V.; Weller, S.D.; Johanning, L.; Thies, P.R.; Le Boulluec, M.; Le Roux, D.; Soulé, V.; Ohana, J. Numerical model validation for mooring systems: Method and application for wave energy converters. Renew. Energy 2015, 75, 869–887. [Google Scholar] [CrossRef] [Green Version]
- Teledyne RD Instruments. WavesMon v3.08 User’s Guide. 2011. Available online: http://new.comm-tec.com/Docs/Manuali/RDI/WavesMon%20Users%20Guide.pdf (accessed on 1 April 2016).
- Hjetland, E.; Bjerke, I.; Tjensvoll, G.; Sjolte, J. A brief introduction to the bolt-2-wave project. In Proceedings of the 9th European Wave and Tidal Energy Conference (EWTEC), Southampton, UK, 5–9 September 2011.
- FaBTest. Description of Site Characteristics and Eligible Test Installations. 2012. Available online: http://fabtest.com/sites/default/files/Appendix-9-FaB-Test-site-characteristics-05.03.2012.pdf (accessed on 1 April 2016).
- Fugro. SEAWATCH Mini II Buoy. 2010. Available online: http://www.oceanor.no/related/Datasheets-pdf/SW20_SEAWATCH_Mini_II_Buoy_FINAL.pdf (accessed on 1 April 2016).
- Sanmuganathan, V. Seawatch Mini II Buoy; User Manual; Fugro GEOS Ltd.: Wallingford, UK, 2009. [Google Scholar]
- EquiMar (Equitable Testing and Evaluation of Marine Energy Extraction Devices in terms of Performance, Cost and Environmental Impact). EquiMar Deliverable D2.2: Wave and Tidal Resource Characterisation. 2011. Available online: http://www.equimar.org/equimar-project-deliverables.html (accessed on 1 April 2016).
- RD Instruments. Acoustic Doppler Current Profiler. Principles of Operations. A Practical Primer. 1996. Available online: http://misclab.umeoce.maine.edu/boss/classes/SMS_598_2012/RDI_Broadband%20Primer_ADCP.pdf (accessed on 1 April 2016).
- DNV (Det Norske Veritas). DNV-OS-E301: Position Mooring; DNV: Oslo, Norway, 2013. [Google Scholar]
- Ambühl, S.; Sterndorff, M.; Sørensen, J.D. Extrapolation of extreme response for different mooring line systems of floating wave energy converters. Int. J. Mar. Energy 2014, 7, 1–19. [Google Scholar] [CrossRef]
- Thies, P.R.; Johanning, L.; McEvoy, P. A novel mooring tether for peak load mitigation: Initial performance and service simulation testing. Int. J. Mar. Energy 2014, 7, 43–56. [Google Scholar] [CrossRef] [Green Version]
- API (American Petroleum Institute). API RP 2SK: Recommended Practice for Design and Analysis of Stationkeeping Systems for Floating Structures; API: Washington, DC, USA, 2005. [Google Scholar]
- MARINET. SEAI_OEDU - National Wave Energy Test Site, Galway Bay. Available online: http://www.fp7-marinet.eu/SEAI_OEDU-wave-energy-test-site-galway-bay.html (accessed on 1 April 2016).
- JP KENNY. SW Wave Hub—Metocean design basis. 2009. Available online: http://www.wavehub.co.uk/downloads/Resource_Info/Metocean_design_basis_Metoc_JP_Kenny_Report_2009.pdf (accessed on 1 April 2016).
- Johanning, L.; Smith, G.H.; Wolfram, J. Measurements of static and dynamic mooring line damping and their importance for floating WEC devices. Ocean Eng. 2007, 34, 1918–1934. [Google Scholar] [CrossRef]
- Paredes, G.M.; Bergdahl, L.; Palm, J.; Eskilsson, C.; Pinto, F.T. Station keeping design for floating wave energy devices compared to floating offshore oil and gas platforms. In Proceedings of the 10th European Wave and Tidal Energy Conference (EWTEC), Aalborg, Denmark, 2–5 September 2013.
- DNV (Det Norske Veritas). Classification Notes 30.6: Structural Reliability Analysis of Marine Structures; DNV: Oslo, Norway, 1992. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Parameter | Sample Frequency (Hz) | Data Sample Size |
|---|---|---|---|
| Teledyne RDI Workhorse Sentinel ADCP | Surface elevation and water current velocities converted into: wave: HS (m), TP (s), DP (deg); current: mean current magnitude CMag (m/s) and direction CDir (deg) along the water column (0.5-m bins) | 2 Hz | 1024 s |
| Axial load cells | Mooring loads: time series of loads (kN) | 20 Hz | 10 min |
| Mooring at SWMTF (from Seabed to Surface) | |
|---|---|
| Type of Legs | Catenary |
| Number of equally-spread lines | 3 |
| Anchor type | Drag embedment anchor |
| Total length of each leg (including sensors and connections) | 63 m |
| Length of the line in the water column | ~38 m |
| Static tension | ~3 kN |
| Weight to avoid large excursion or vertical mooring load on the anchor | 4 m of DN32 stud link chain, 22 kg/m in air |
| No contact of the nylon rope with the seabed | 36 m of DN24 open link chain, 11 kg/m in air |
| Nylon rope to provide compliance | 20 m of 44-mm nylon rope, 1.2 kg/m in air |
| Protection of the top end of the nylon rope and mooring load measurement | Chain and load cells |
| Buoy | 3.25-tonne buoy |
| Sensor | Parameter | Sample Frequency (Hz) | Data Sample Size |
|---|---|---|---|
| FUGRO Oceanor Seawatch mini II directional wave buoy | HS,TP and DP | 2 | 30 min |
| Axial load cells: Strainstall 5395 Underwater load shackles | Time series of mooring loads (tonnes) | 200 | Up to 20 min |
| Mooring at Fred Olsen Device (from Seabed to Surface) | |
|---|---|
| Type of Legs | Catenary |
| Number of equally-spread lines | 5 |
| Anchor type | Drag embedment anchor |
| Total length of each leg (including sensors and connections) | 113 to 153 m |
| Length of the line in the water column | ~91 m |
| Static tension | ~7.5 kN |
| Weight to avoid large excursion or vertical mooring load on the anchor | line 1 to 5: 70/80/40/40/70 m DN60 stud link chain, Grade 1 79 kg/m in air |
| No contact of the nylon rope with the seabed | 38 m of DN36 open link chain, Grade 2 26 kg/m in air |
| Nylon rope to provide compliance | 32 m of 64 mm nylon braid line rope |
| 2.5 kg/m in air | |
| Protection of the top end of the nylon rope | 3 m of DN36 open link chain, Grade 2 26 kg/m in air |
| Buoy | ~40-tonne buoy |
| τ\K | 0 | 2.5 | 5 | 7.5 | 10 |
|---|---|---|---|---|---|
| 0 kN | 100.00% | 99.98% | 14.56% | 0.40% | 0.02% |
| 7.5 kN | 13.29% | 13.29% | 6.45% | 0.32% | 0.01% |
| 10 kN | 5.00% | 5.00% | 3.38% | 0.27% | 0.01% |
| 12.5 kN | 2.09% | 2.09% | 1.64% | 0.18% | 0.01% |
| 20 kN | 0.25% | 0.25% | 0.25% | 0.07% | 0.01% |
| 30 kN | 0.04% | 0.04% | 0.04% | 0.02% | 0.01% |
| 40 kN | 0.01% | 0.01% | 0.01% | 0.01% | 0.01% |
| 50 kN | 0.01% | 0.01% | 0.01% | 0.01% | 0.01% |
| SWMTF | Bolt-2 LifeSaver | ||
|---|---|---|---|
| line (Orientation °) | Number of Peak Loads/Percentage of Datasets Containing Peak Loads | line (Orientation °) | Number of Peak Loads/Percentage of Datasets Containing Peak Loads |
| line 1 (185°) | 55/0.29% | line 1 (136°) | 23/0.47% |
| line 2 (305°) | 1/0.01% | line 2 (64°) | 1/0.02% |
| line 3 (65°) | 73/0.39% | line 3 (352°) | 0/0% |
| line 4 (280°) | 1/0.02% | ||
| line 5 (208°) | 11/0.23% | ||
| Total number of 10-min datasets with wave data available | 18,837 | Total number of datasets after correction and with wave data available at the same time | 4878 |
| Total number of 10-min datasets with 90° < DP < 150° | 8878/47% | Total number of datasets with 120° < Dmean < 150° | 745/15% |
| Total number of 10-min datasets with 150° < DP < 210° | 9052/48% | Total number of datasets with 180° < Dmean < 210° | 2060/42% |
| Natural Period | |
|---|---|
| Surge/sway | 24.8 s |
| Heave | 2.0 s |
| Roll/pitch | 2.4 s |
| yaw | 6.3 s |
| Location | Scale | Nominal Water Depth | Tidal Range | Tidal Range/Nominal Water Depth | |
|---|---|---|---|---|---|
| Nursery site | |||||
| SWMTF | 1/3 | 27 | 5.4 | 20% | |
| FaBTest [16] | 1 | 45 (15–55) | 6 | 13% | |
| Galway Bay [19] | 1/4 | 23 | 4 | 17% | |
| Wave energy facility | |||||
| WaveHub [20] | 1 | 55 (50–60) | 7.3 | 13% | |
| EMEC Billia Croo | 1 | ~50 | 6 | 12% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Harnois, V.; Thies, P.R.; Johanning, L. On Peak Mooring Loads and the Influence of Environmental Conditions for Marine Energy Converters. J. Mar. Sci. Eng. 2016, 4, 29. https://doi.org/10.3390/jmse4020029
Harnois V, Thies PR, Johanning L. On Peak Mooring Loads and the Influence of Environmental Conditions for Marine Energy Converters. Journal of Marine Science and Engineering. 2016; 4(2):29. https://doi.org/10.3390/jmse4020029
Chicago/Turabian StyleHarnois, Violette, Philipp R. Thies, and Lars Johanning. 2016. "On Peak Mooring Loads and the Influence of Environmental Conditions for Marine Energy Converters" Journal of Marine Science and Engineering 4, no. 2: 29. https://doi.org/10.3390/jmse4020029
APA StyleHarnois, V., Thies, P. R., & Johanning, L. (2016). On Peak Mooring Loads and the Influence of Environmental Conditions for Marine Energy Converters. Journal of Marine Science and Engineering, 4(2), 29. https://doi.org/10.3390/jmse4020029