1. Introduction
In recent years, substantial progress is being made in the computation of the flow around ducted propeller systems with Reynolds-averaged Navier-Stokes (RANS) equations by several research groups. For example, Sánchez-Caja et al. [
1] used a RANS solver to simulate incompressible viscous flow around a propeller in the presence of a duct. Posteriorly, the influence of the rudder was also taken into account in the calculation of the viscous flow [
2]. In addition, Abdel-Maksoud and Heinke [
3], and Bhattacharyya et al. [
4] have investigated the scale effects on ducted propellers numerically using RANS. Alternatively, Kim et al. [
5] presented detailed RANS simulations for a ducted propeller system including verification and validation studies. Subvisual cavitation and acoustics modelling were also investigated in this work. However, the computational effort is still reasonably high due to the need for good numerical resolution in small flow regions dominated by strong viscous effects such as in the gap between the propeller blade tip and duct. This requirement poses considerable demands in the number of grid cells needed for accurate computations with associated long computational times, which still makes the method less useful for routine design studies.
On the other hand, in the past a number of methods based on inviscid potential flow theory have been proposed for the analysis of ducted propellers. Kerwin et al. [
6] combined a panel method for the duct with a vortex lattice method for the propeller. This method was compared with experimental data available from open-water tests by Hughes et al. [
7]. Later, Hughes [
8] presented a complete three-dimensional panel method for both the propeller and duct, where a special procedure for modelling the gap flow is implemented. More recently, Lee and Kinnas [
9] described a panel method for the unsteady flow analysis of ducted propeller with blade sheet cavitation. These methods are nowadays very efficient from the computational point of view which makes them particularly suited for design studies.
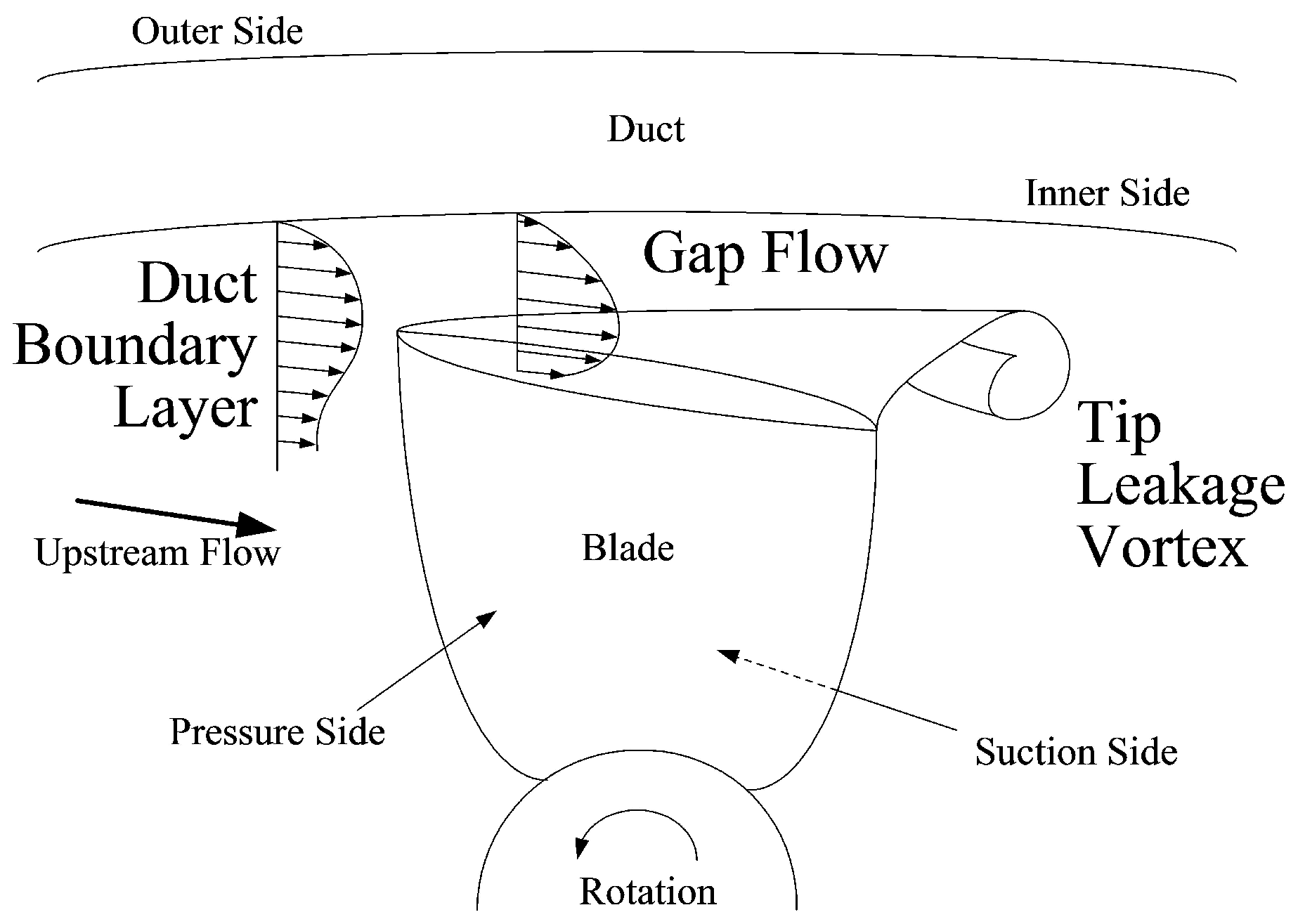
However, the inviscid methods have met serious limitations in their practical applications related to their inability to adequately model viscous effects occurring in a ducted propeller system, especially in the gap region and in the duct boundary layer leading to separation phenomenon. Due to the relative motion between the duct and the propeller blades, combined with the pressure difference across the gap, different viscous mechanisms occur simultaneously in this region, such as the tip-leakage vortex and the gap flow due to the duct and blade boundary layers. Schematics of this process are shown in
Figure 1. The flow in the gap region is rather complex, since the duct and blade boundary layers influence the gap flow and consequently the characteristics of the tip-leakage vortex. The tip-leakage vortex is also responsible for the different loading of the ducted propeller in comparison with the open propeller and must be taken into account in the inviscid model. An extensive experimental investigation to examine the tip-leakage flow on ducted propulsors was carried out by Oweis et al. [
10]. Another important viscous effect is the flow over the surface of the duct, where separation of the boundary layer creating a recirculation region may occur due to the thick blunt trailing-edge, which also affects the duct loading.
The calculation of the flow around a ducted propeller system in open-water with a panel code has been the subject of investigation by Instituto Superior Técnico (IST) and Maritime Research Institute Netherlands (MARIN), see [
11,
12,
13]. In these studies, a low-order panel method has been used to predict the open-water diagram of a ducted propeller system, where several modelling aspects have been analysed for the improvement of the inviscid (potential) flow solution. The investigation comprehended the influence of the Kutta condition, gap flow model and wake model on the performance prediction. A similar method has also been implemented by MARIN in an in-house panel code [
14,
15].
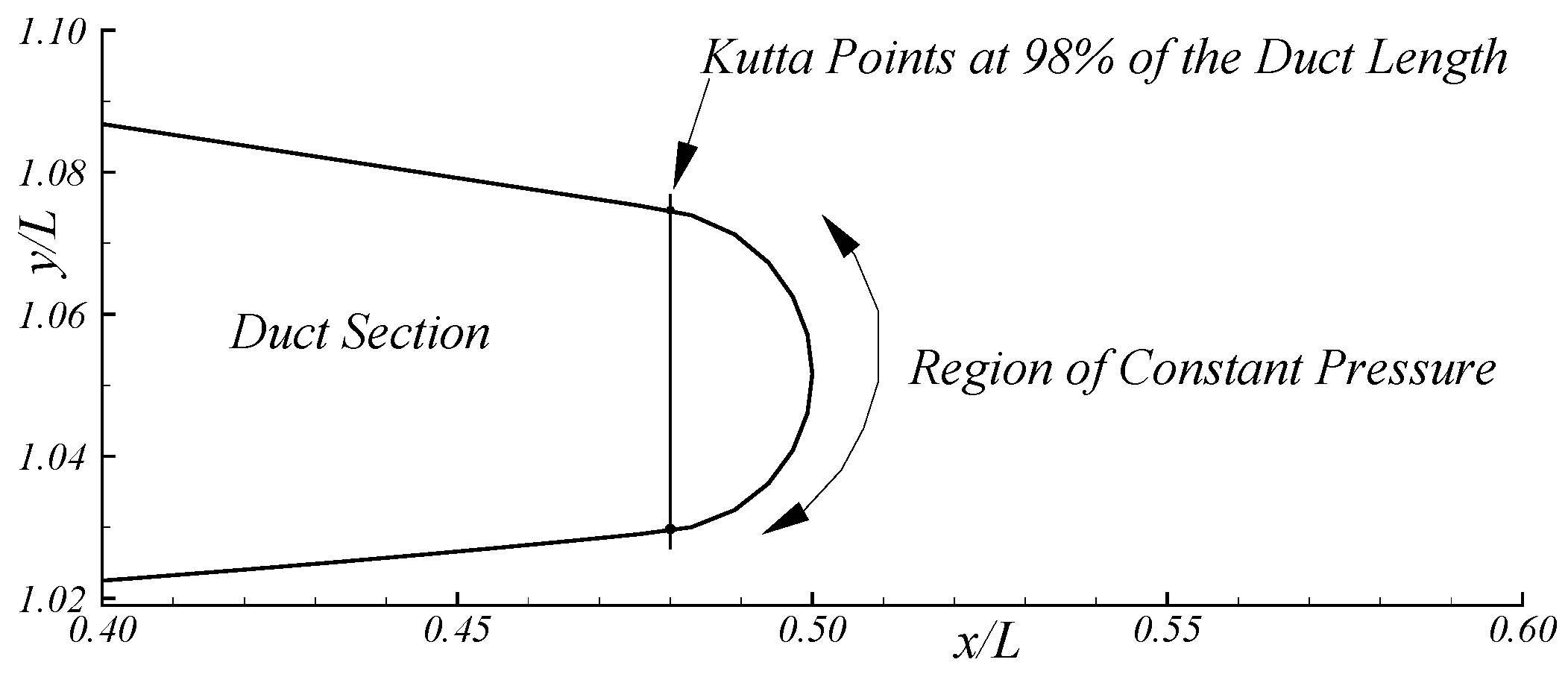
In this investigation, an alternative Kutta condition has been proposed for the duct trailing-edge, which has a thick round geometry in comparison to the sharp trailing-edge of the propeller blades. In this new Kutta condition, the chordwise location for pressure equality on both sides of the duct trailing-edge has a strong influence on the propeller and duct force predictions.
To account for the gap flow between the blade tip and duct inner side, Hughes [
8] proposed an iterative procedure where the gap flow is treated as a two-dimensional orifice. In his model, the gap between the blade tip and the duct inner surface is modelled as a rigid surface, named in this study as the gap strip. Then, transpiration velocities are computed from the pressure-difference in the gap strip, where an empirical discharge coefficient is used to take into account the loss of energy as the fluid passes through the gap. A similar gap model has been combined with a vortex-lattice method by Gu and Kinnas [
16]. From previous comparative studies, see [
11,
13], similar results were found between the closed (sealed) gap model and the gap flow model with transpiration velocity based in the work of Hughes [
8]. Therefore, the closed gap model is usually preferred in potential flow methods [
13,
15,
17], since a negligible effect on the overall performance is obtained.
The influence of the blade wake geometry on the prediction of the ducted propeller performance with a panel method has been studied in detail, see [
11,
13]. In this work, the blade wake pitch is aligned with the local flow velocity using an Euler scheme, leading to an improvement in the prediction of the propeller forces. A similar model for alignment of the blade wake was presented by Kinnas et al. [
17], and Kim et al. [
18] extended the wake alignment scheme for both the blade wake and duct wake. However, from the work carried out by IST and MARIN [
11], the loading predictions of the ducted propeller system were found to be critically dependent on the blade wake pitch especially at the tip. In this way, a simple model for the interaction between the blade wake and the boundary layer on the duct inner side was implemented in combination with the wake alignment model [
11,
13]. With this model, a reasonable to good agreement was obtained between the inviscid predictions and the experimental data from open-water tests [
13]. However, significant differences were still seen in the open-water predictions at low advance ratios.
It is known that the prediction of the propeller performance at bollard pull conditions is important in the design stage. In the present work, a comparison between the results obtained by the panel method with RANS calculations is made to obtain a better insight on the viscous effects of the ducted propeller and on the limitations of the inviscid flow model. The comparison focuses mainly at the low advance ratios, where a new approach for the gap strip is proposed in the panel method. The paper is organised as follows: a description of the numerical methods is given in
Section 2; the comparison of the inviscid predictions with the RANS calculations and the experimental open-water data is presented in
Section 3; in
Section 4 the main conclusions are drawn.
3. Results
3.1. Grids and Numerical Set-Up
Results are presented for the propeller Ka4-70 with pitch-diameter ratio
inside the duct 19A operating in open-water conditions. The length-diameter ratio
of duct 19A is
. The gap between the duct inner side and the blade tip is uniform and equal to
of the propeller radius. The geometry of the Ka-series and duct section is given by Kuiper [
23].
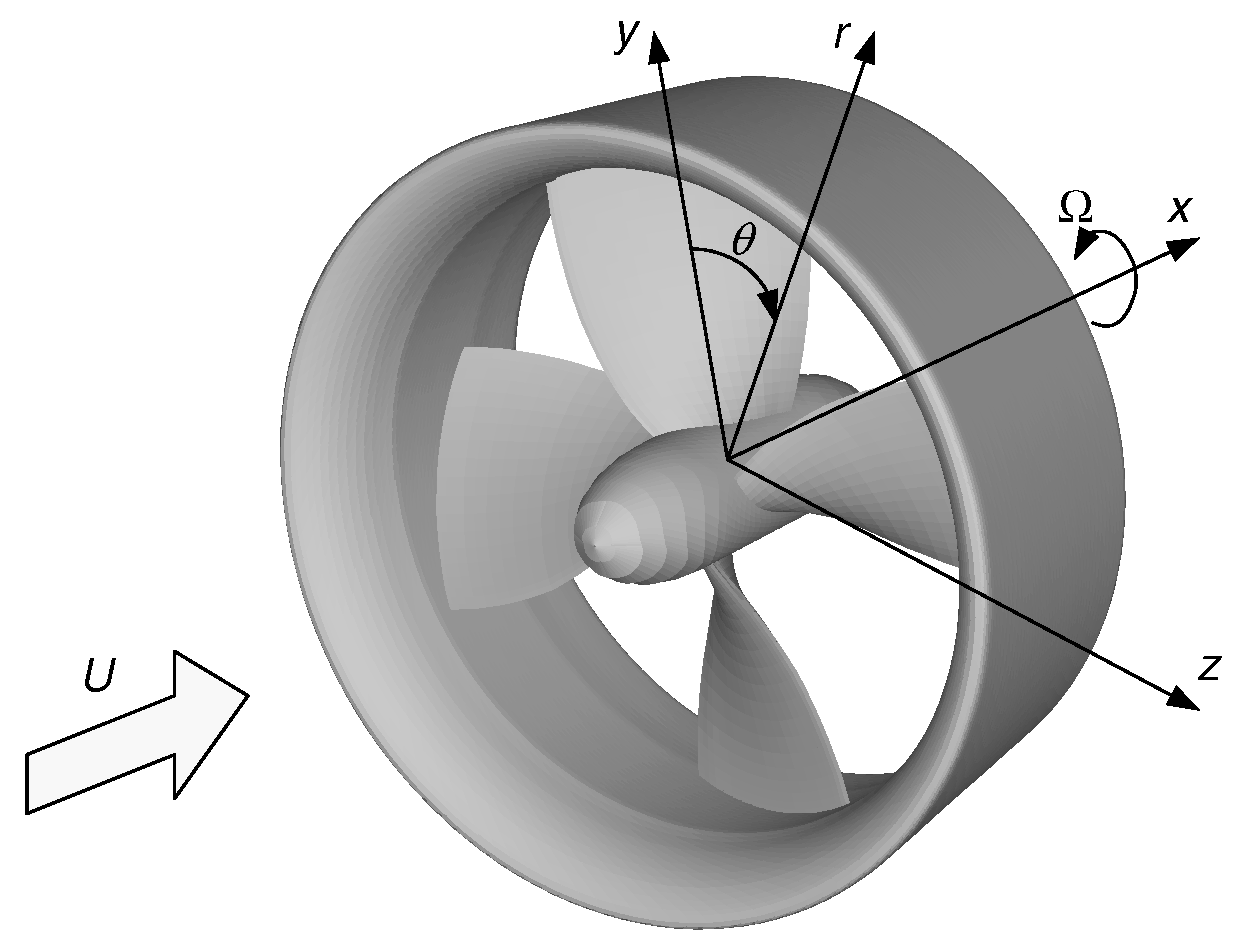
The propeller operating conditions are defined by the advance coefficient
, where
is the rate of revolution and
is the propeller diameter. The open-water characteristics are expressed in the propeller thrust coefficient
, the duct thrust coefficient
, the torque coefficient
and the open-water efficiency
:
where
is the propeller thrust,
the duct thrust and
Q the propeller torque. Other used quantities are the vorticity
and the pressure coefficient
, where
is the undisturbed static pressure.
Convergence studies of the inviscid solution have been carried out for the panel method with the rigid wake model. The propeller blade discretisations ranged from 20 × 11 to 70 × 36, corresponding to the chordwise and spanwise radial directions, respectively. The number of panels on the duct, hub and wakes is modified according to the number of panels on the blade. The iterative pressure Kutta condition is applied which, in general, converged after three iterations to a precision of at the Kutta points.
The variation in thrust and torque for the different grid sizes obtained from the panel method computations at
is shown in
Table 1. The variation of the open-water characteristics decrease with the grid refinement level. Differences lower than 1% are obtained for the 50 × 26 blade grid in comparison to the finest grid. In addition, the computational time for the 50 × 26 blade grid relative to the finest grid is in the order of 27%. Therefore, the 50 × 26 blade grid is used in the subsequent studies carried out with both the rigid wake and wake alignment models. For the wake alignment model, the wake geometry is obtained after five iterations using an angular step of
degrees. In combination with the wake alignment model, a duct boundary layer correction is applied with a thickness equal to
and a power law velocity profile with exponent equal to
.
For the RANS simulations, the computational domain is defined as a cylindrical domain with a length of 5 propeller diameters in all directions. For this problem, five nearly-geometrically similar multi-block structured grids were generated using the commercial grid generation package GridPro (
www.gridpro.com). The grids range from 1.1 to 26.8 million cells. A fine boundary-layer resolution is considered for all grids, where the maximum dimensionless distance to the wall of the first cell, known as
, is lower than 1. For the boundary conditions a uniform flow at the inlet and constant pressure at the outer boundary is applied. At the outlet, an outflow condition of zero downstream gradient is used. For the propeller blades, duct and hub, a non-slip boundary condition is set. A rotational velocity is prescribed to the blades and hub, while the duct does not rotate.
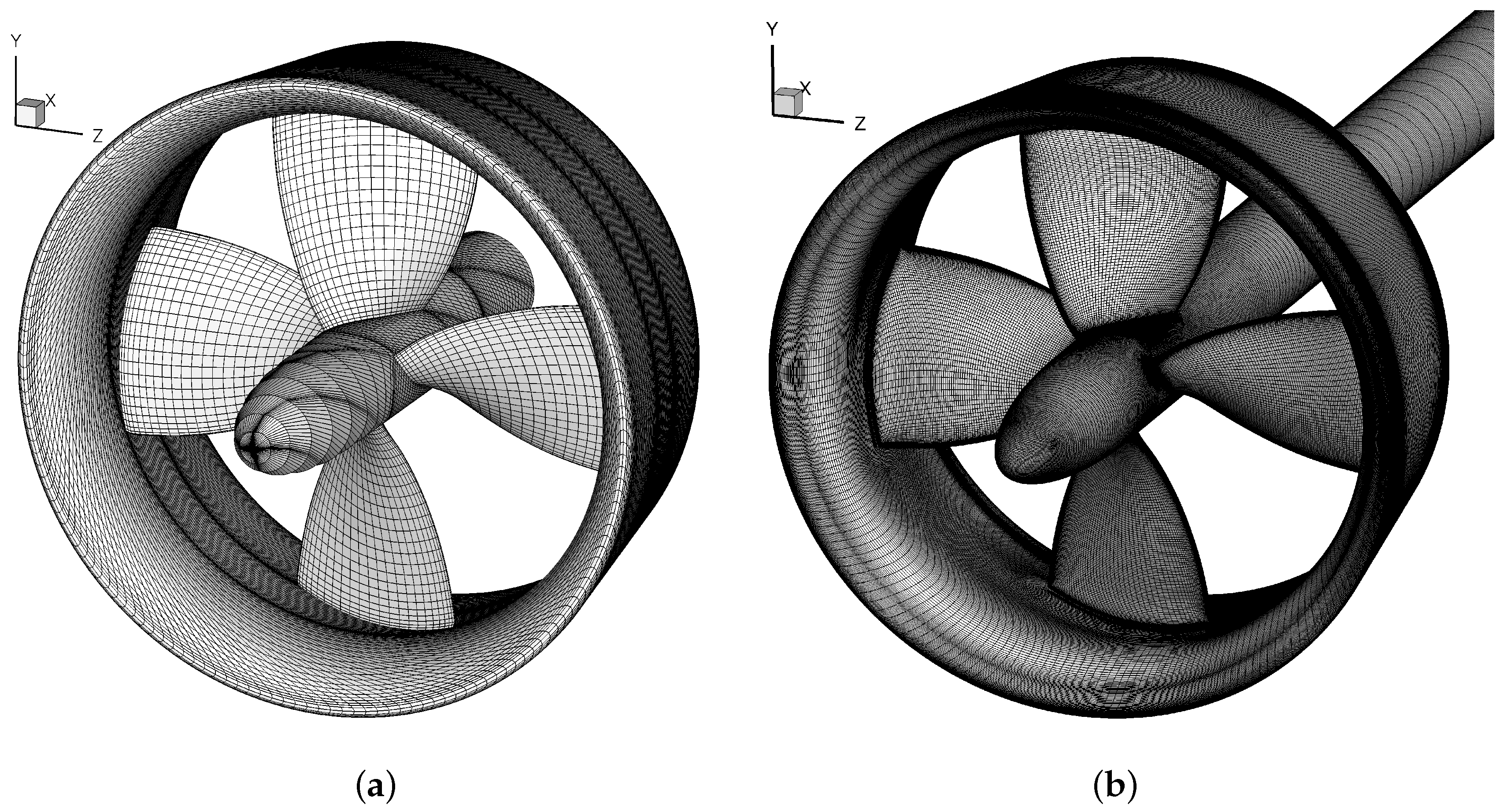
In
Figure 4 an overview of the grids used for the calculations with panel code PROPAN and RANS code ReFRESCO is shown.
The variation in thrust and torque for the different grid sizes is listed in
Table 2 at
. A reduction in the variation of the open-water quantities with the increased number of cells is observed. Although the differences are less than 1% for the grid with 12.9 million cells, the finest grid (26.8 million cells) is used in the comparative study, since not only the propeller forces, but also local flow quantities are considered in the present analysis. For the prediction of the open-water performance, the ducted propeller is tested for a range of advance coefficients between
and
corresponding to Reynolds numbers from 3.5 ×
to 3.8 ×
, where the Reynolds number is defined based on the propeller blade chord length at
and the resulting onset velocity at that radius.
3.2. Influence of the Wake Model
In this section the influence of the wake model is studied. The analysis is presented for three advance coefficients:
,
and
. The advance coefficients
and
refer to highly loaded conditions from where significant differences are still obtained with the present inviscid model, see Baltazar et al. [
11,
13].
The inviscid thrust and torque coefficients are compared with experimental open-water data in
Table 3. Significant differences are seen in the propeller thrust and torque at low advance coefficients with the rigid wake model. By using the wake alignment model, which includes a correction in the axial velocity due to the interaction between the blade wake and the duct boundary-layer, a reduction in the propeller force coefficients is obtained and lower differences in comparison with the experimental data are observed. This effect has been studied before [
11] and is related to the local reduction of the blade wake pitch near the tip which is responsible for lower incidence angles to the blade sections and as a consequence lower propeller forces.
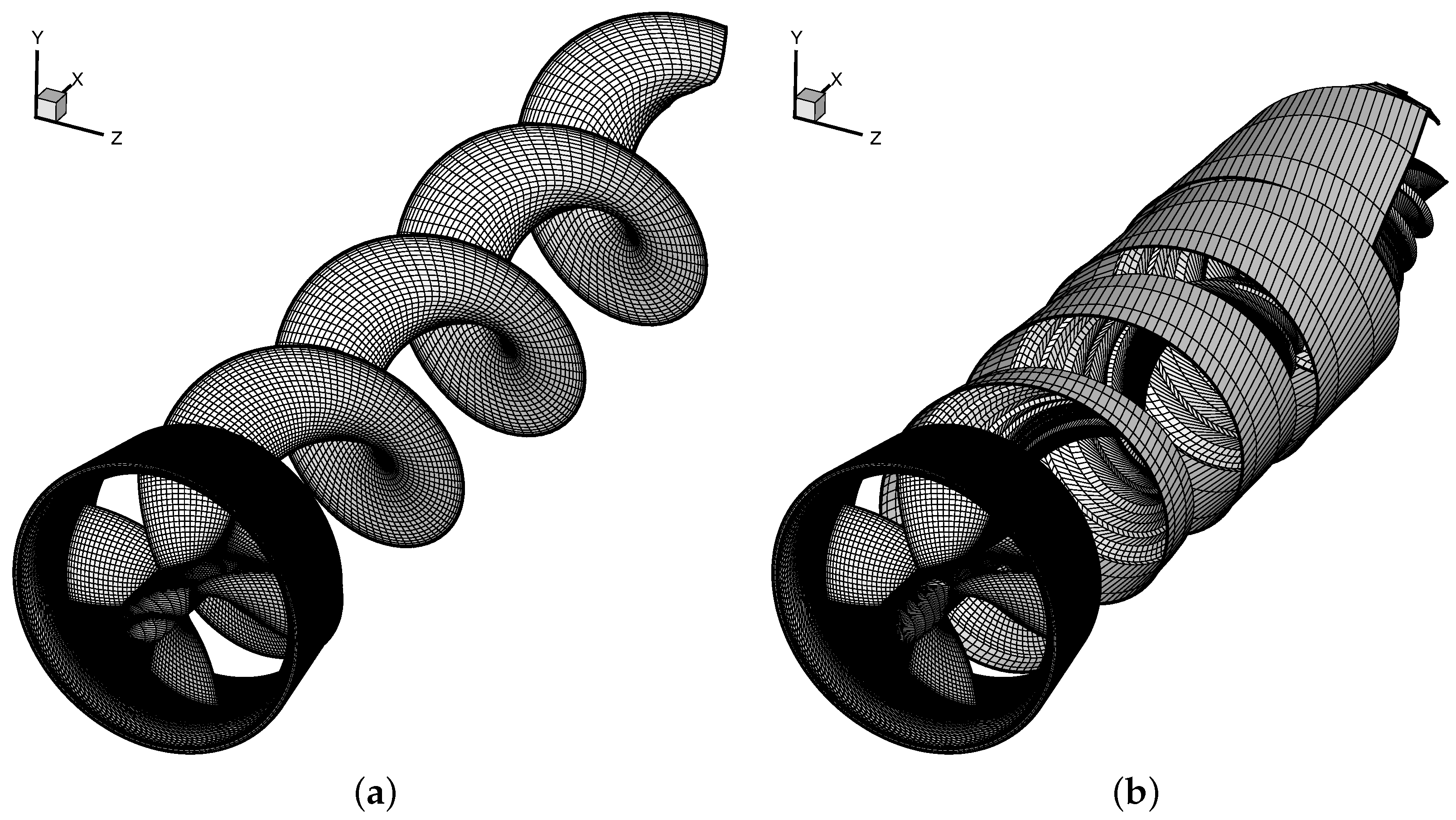
Figure 5 presents the blade wake geometries obtained with the rigid wake model (a) and wake alignment model (b) for
. As we can see from
Figure 5 the correction in the axial velocity due to the duct boundary-layer introduces a significant reduction in the vortex pitch at the blade wake tip.
Still, an over-prediction of the propeller forces is obtained with the panel method (
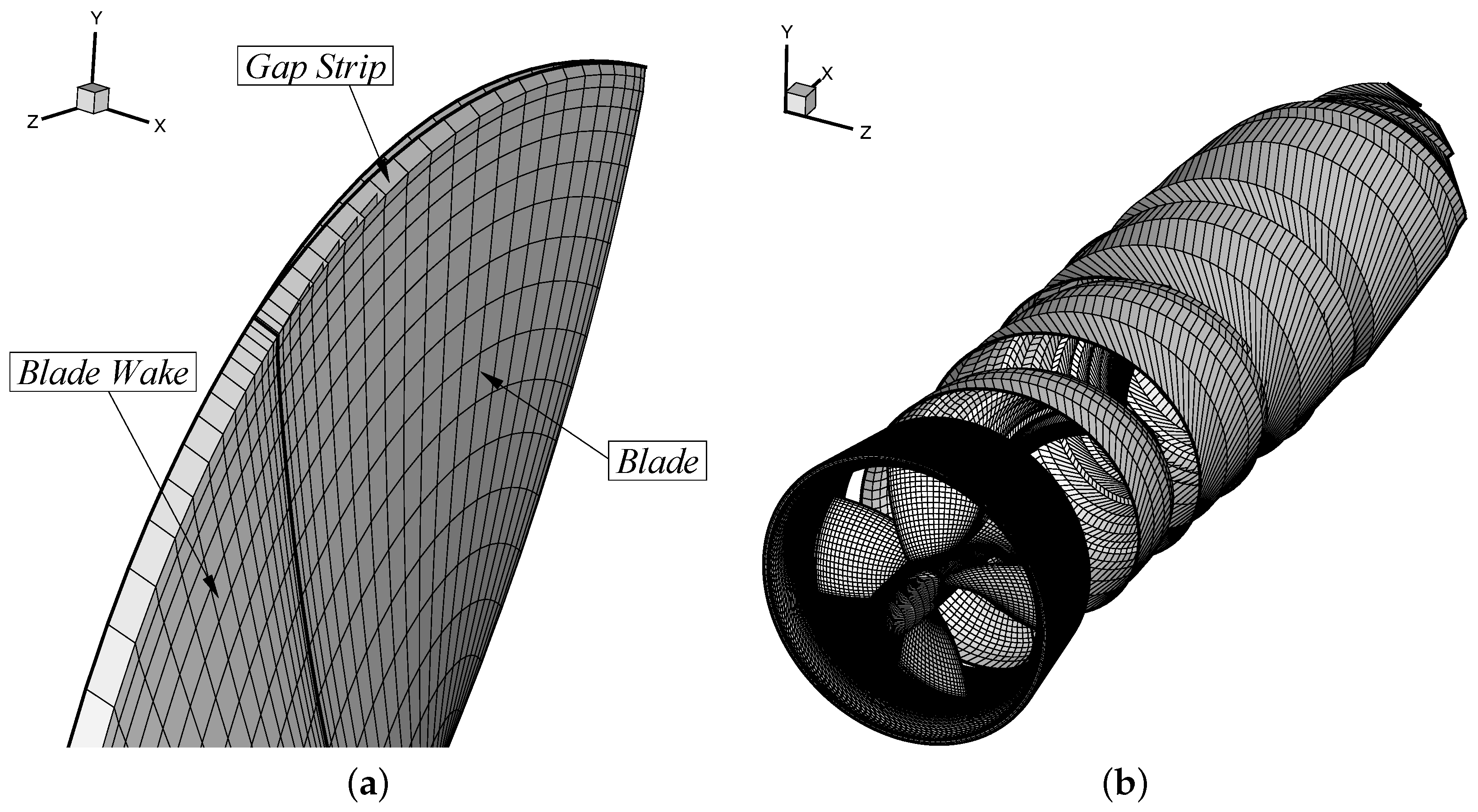
Table 3). These differences suggest that larger corrections to the blade wake pitch are needed and a new wake model is considered, where the gap strip is rotated from the leading edge to reduce its pitch. In this study, the pitch of the gap strip is assumed to be equal to
, whereas the blade pitch is constant and equal to
. In
Figure 6a detail of the gap strip and the obtained blade wake geometry are shown. We note that the gap strip is modelled as a rigid surface and is disconnected from the wake alignment model. The blade wake pitch near the tip may be controlled by the duct boundary-layer correction, Equation (
6). However, for low advance ratios large corrections are needed and this has led to divergence of the Kutta condition and non-smooth surface grids. Therefore, the reduction of the gap strip pitch has proven to be a robust technique and can be applied at low advance ratios. As expected, a higher reduction in the propeller thrust and torque is obtained with the wake alignment model using a reduced pitch for the gap strip and approaches the results of the experimental data, see
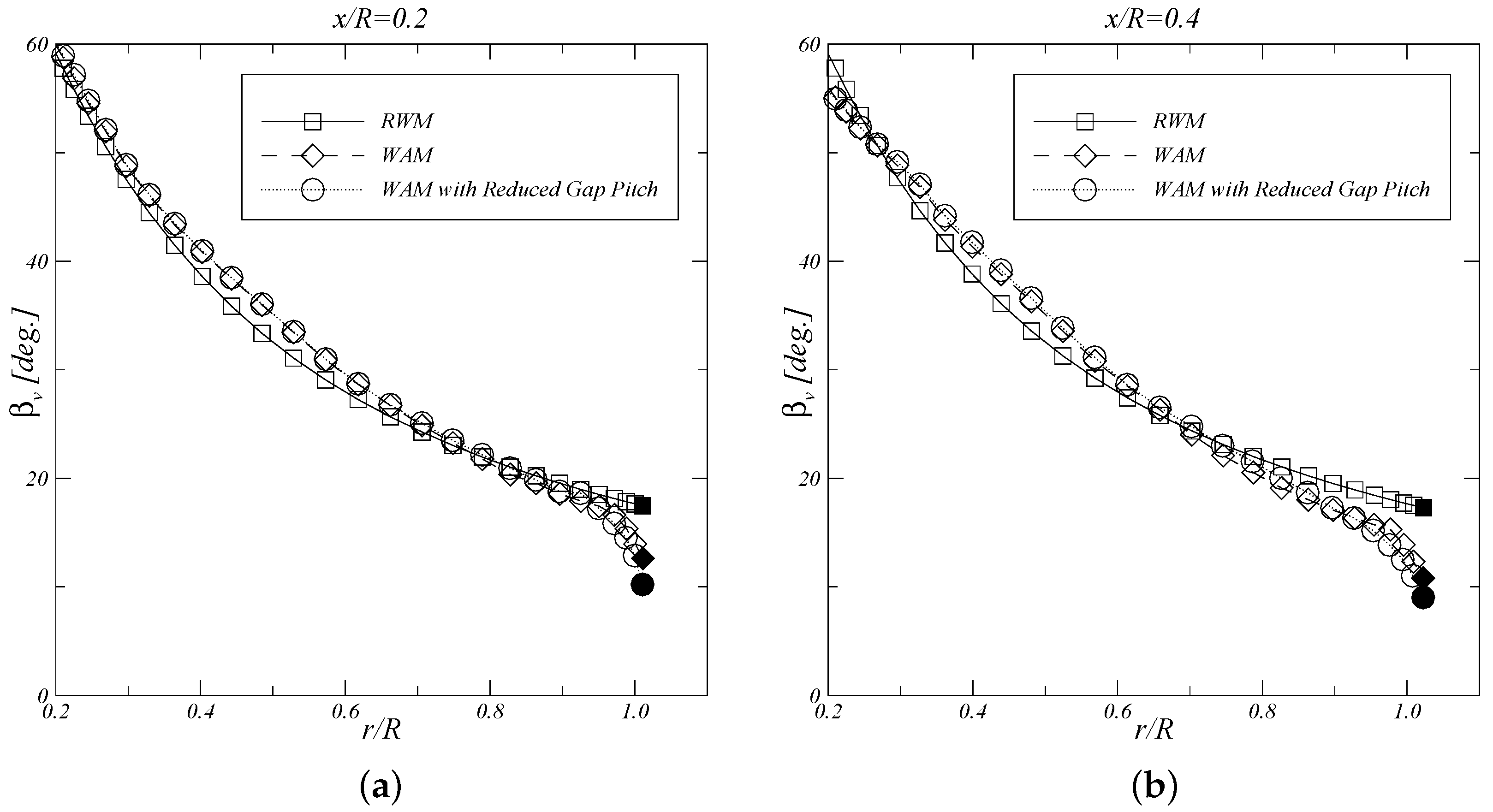
Table 3. The pitch angle of the blade wake
at the axial positions
and
downstream from the propeller is illustrated in
Figure 7, where the local reduction of the wake pitch near the tip is visible.
3.3. Comparison Between PROPAN and ReFRESCO
In order to assess on the quality of the inviscid potential model, the results obtained with the panel code PROPAN and RANS code ReFRESCO are compared. The inviscid wake geometry obtained with the three wake models is compared with the vorticity field at the planes
and
downstream from the propeller, and the blade and duct pressure distributions are shown for the same advance ratios in
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12 and
Figure 13.
Once again, a reduction in the pitch of the tip vortex is seen when changing from the rigid wake model to the wake alignment model. However, the assessment of the correct location of the tip vortex core from the ReFRESCO calculations is difficult to make due to the interaction between the tip vortex and the duct boundary-layer, creating a viscous flow region at the duct inner side.
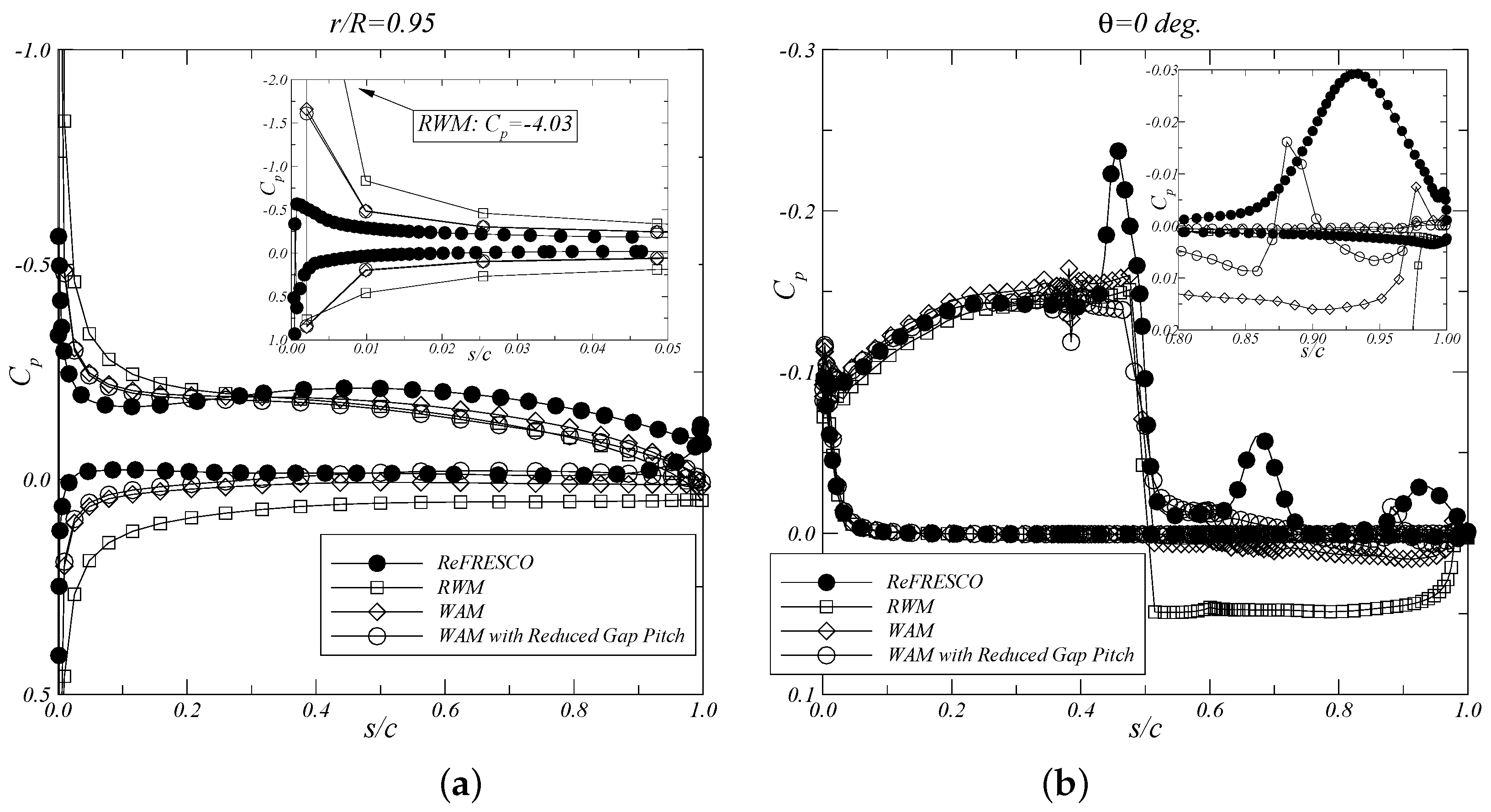
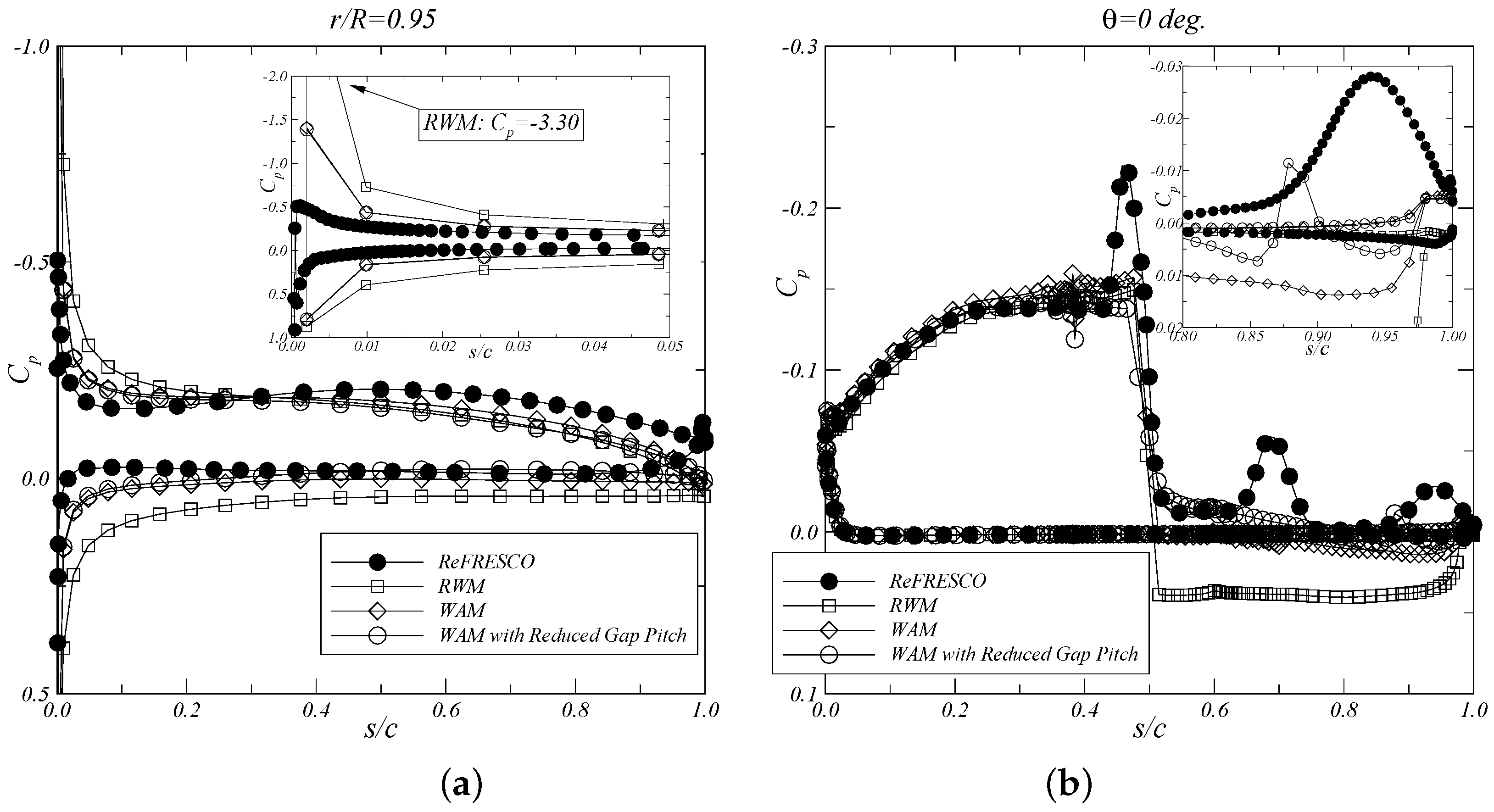
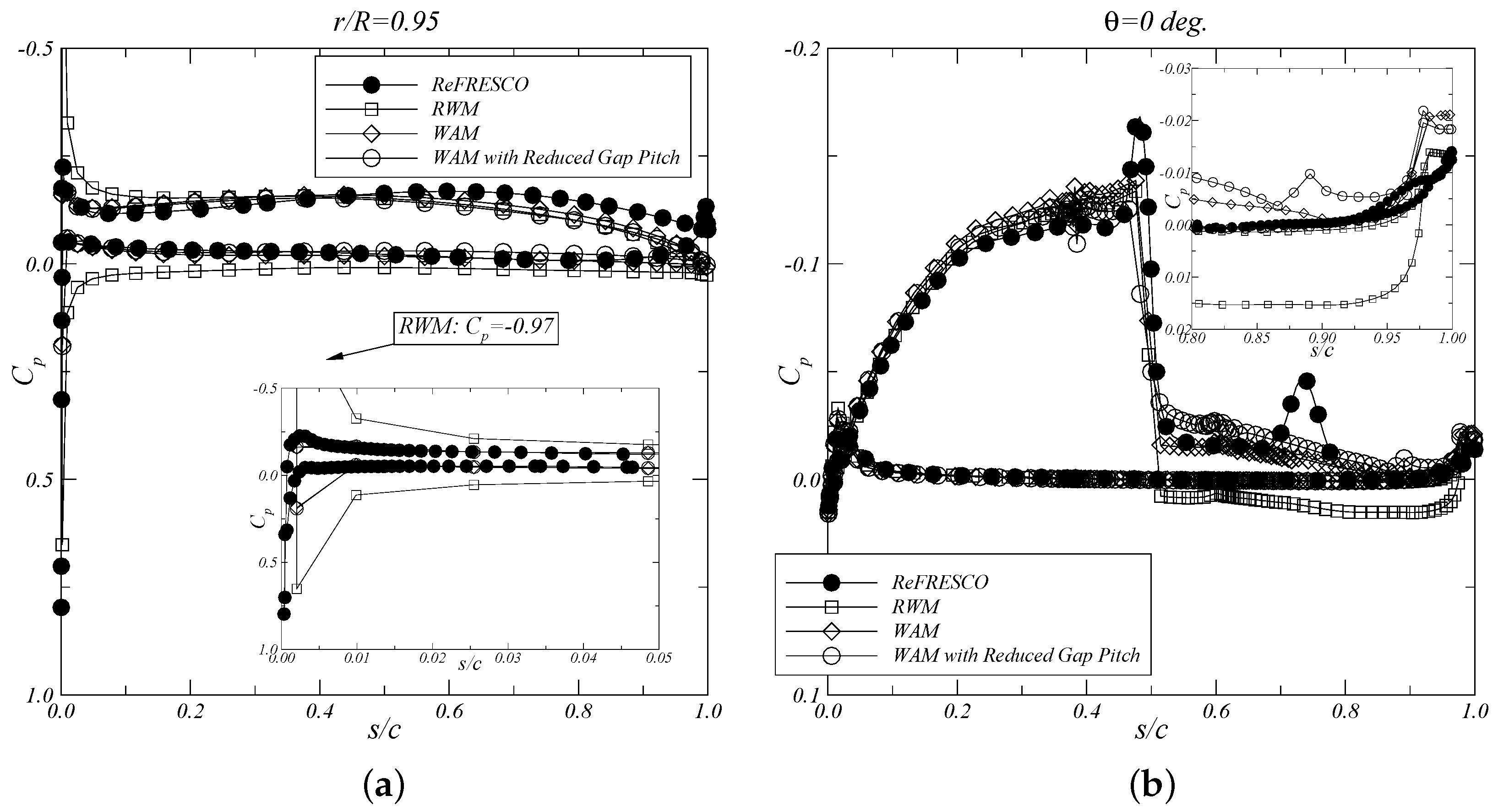
The comparison of the blade and duct pressure distributions is presented along the chordwise direction at the radial section and circumferential position degrees, respectively. For the advance ratios and , an improvement in the agreement between the inviscid and viscous pressure distributions is obtained when using the wake alignment model with reduced pitch for the gap strip. This comparison shows the influence of the tip vortex pitch on the prediction of the pressure distribution, especially on the duct inner side downstream of the propeller. A decrease in the duct pressure downstream of the propeller is obtained with the reduction of the tip vortex pitch, which is consistent with the viscous results. A reduction in the suction peak at the blade leading edge is also visible, since the blade wake sheet strongly affects the local flow direction to the blade sections. For the pressure distribution at , a good agreement in the blade suction peak and duct pressure distribution downstream from the propeller is achieved with the wake alignment model. In this case, no significant improvements are obtained when combining the wake alignment model with the reduced gap pitch. For this advance coefficient, the assumption of a duct thickness equal to is sufficient for the correct prediction of the propeller and duct loads.
However, from this study two exceptions are observed in the comparison of the pressure distributions: at the blade leading edge near the tip and in the duct inner side. For the blade pressure, a larger suction peak is obtained with the inviscid model. This suction peak decreases with the reduction of the blade wake pitch at the tip. For the duct pressure at the inner side, local pressure minima are observed in the viscous computations, which are related to the passage of the tip vortices from the different blades. This effect is not captured by the inviscid calculations due to the closed gap model, where the blade wake is attached to the duct inner side.
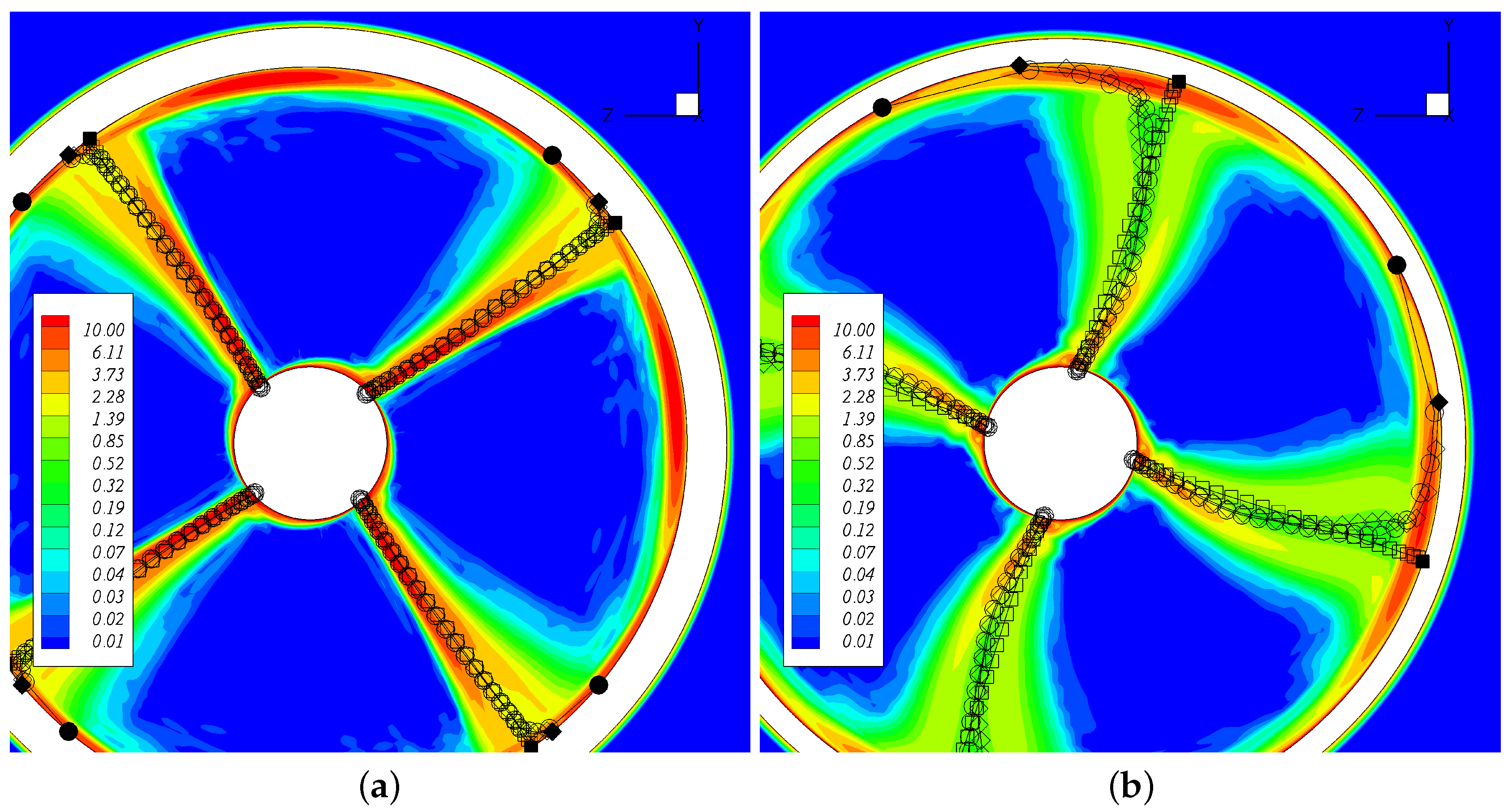
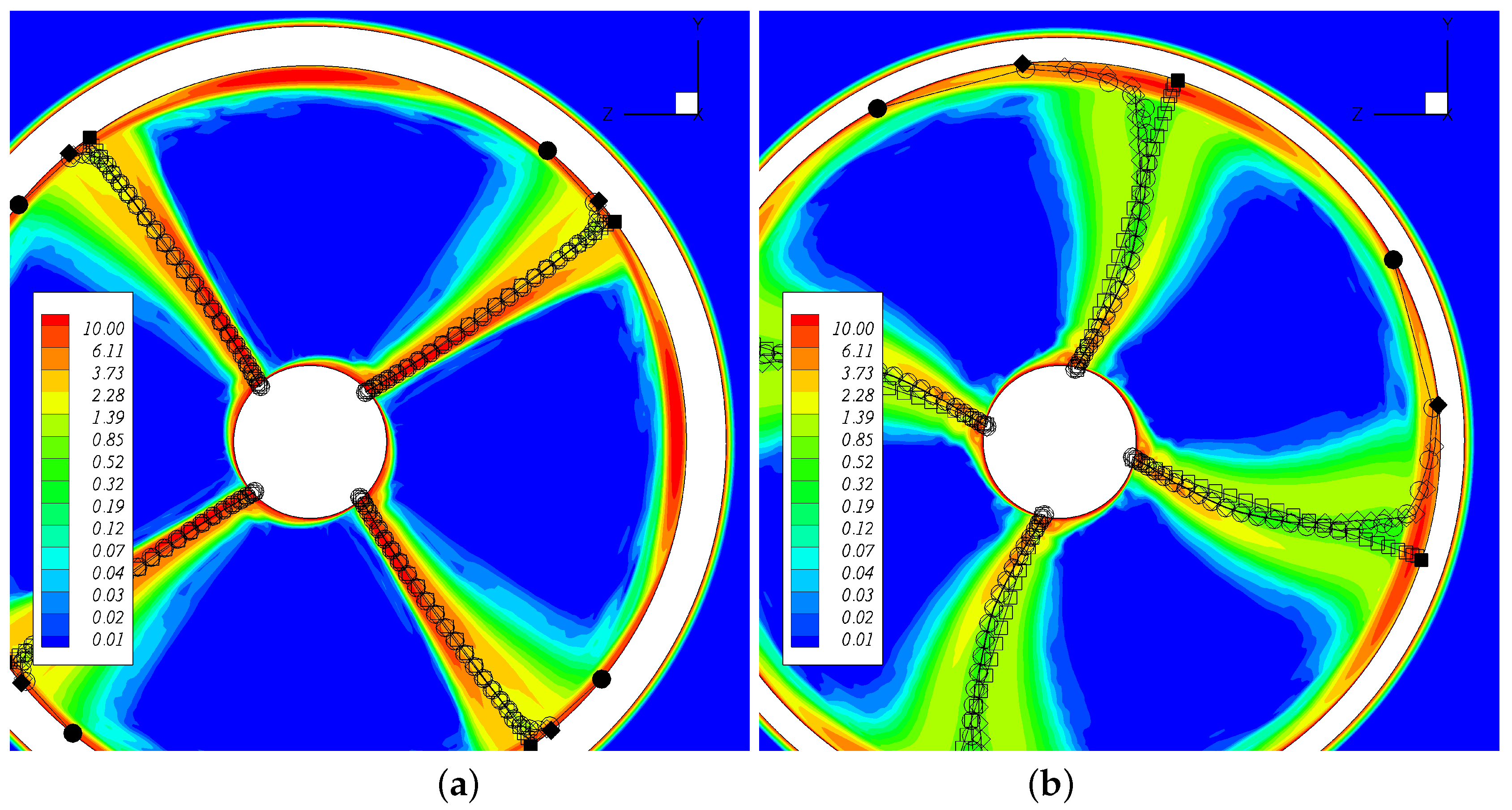
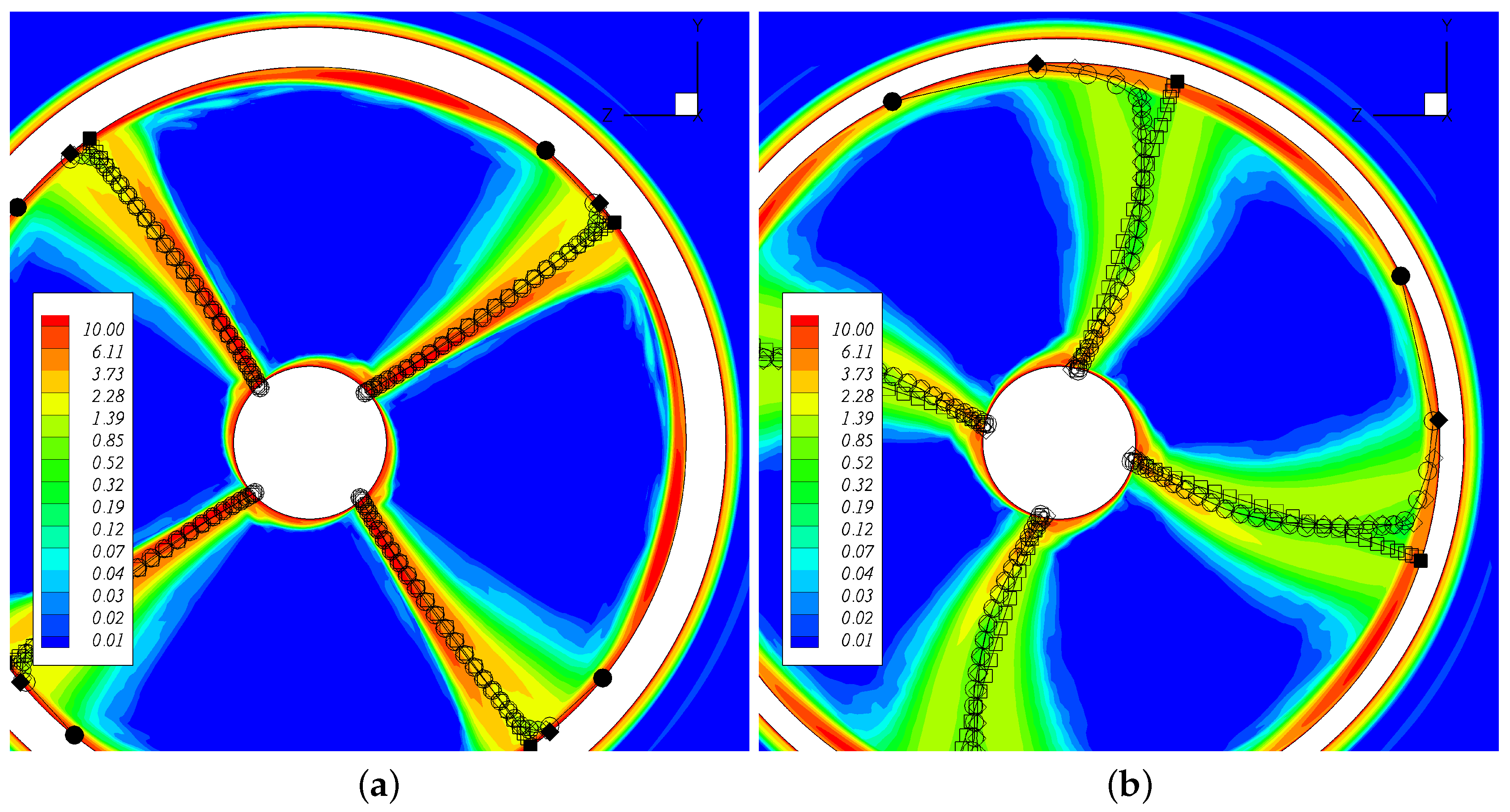
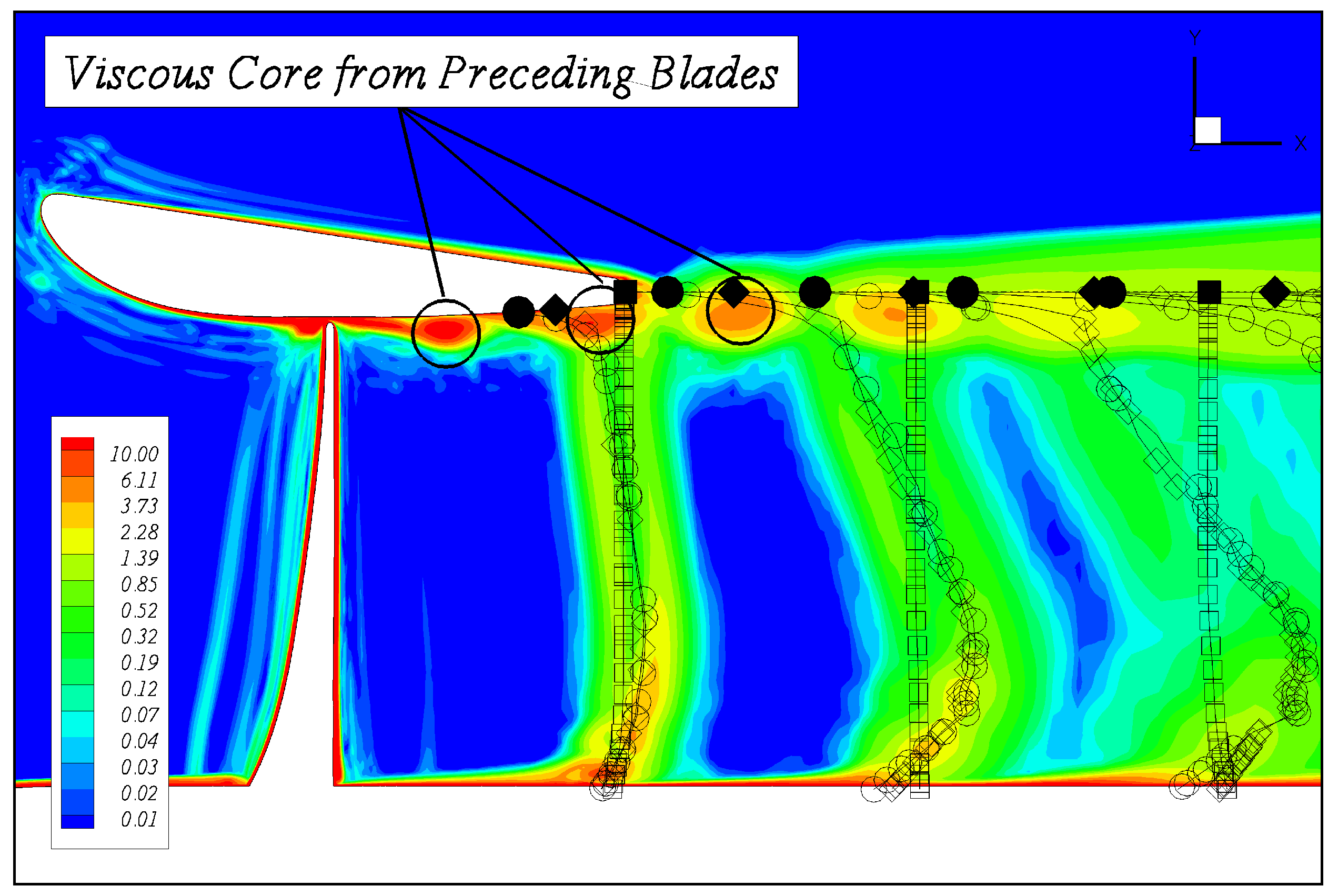
The correlation between the position of the tip vortex core and the peaks of low pressure is illustrated in
Figure 14 for the plane
at
, which corresponds to the circumferential position
degrees. In this figure the inviscid wake geometries are compared with the viscous total vorticity field along the longitudinal direction. A good agreement is obtained with the aligned wakes, except near the blade wake tip, where some differences are still observed.
3.4. Prediction of the Open-Water Performance
In this section the predicted thrust and torque coefficients are compared with experimental data available from open-water tests [
23]. In the wake alignment model the duct boundary-layer thickness (
) is assumed independent of the inflow conditions for the entire open-water range. In addition, in the wake alignment model with reduced gap pitch a constant value of
is also considered for all advance coefficients. The ReFRESCO calculations are also included in the comparison.
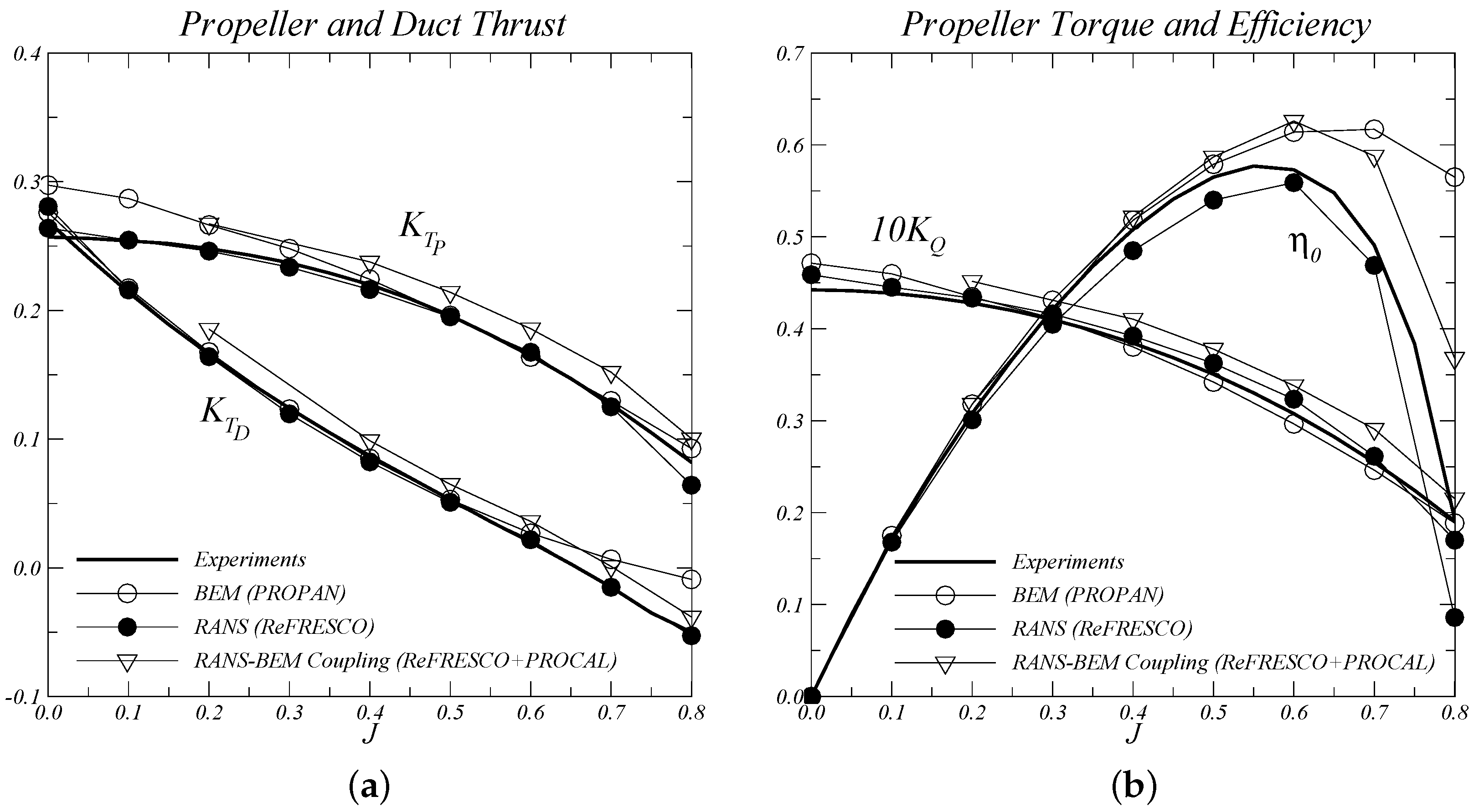
Figure 15 illustrates the comparison of the thrust and torque coefficients with the experiments. A section viscous drag coefficient of
and suppression of the chordwise component of the blade section lift are considered for all inviscid computations. This suppression models the effect of flow separation which eliminates the non-physical suction peaks at the leading edge in the potential flow theory. No viscous drag correction to the duct thrust has been applied.
As expected, a significant over-prediction of the propeller thrust and torque is obtained with the rigid wake model. This result shows that the prescribed wake geometry with constant pitch and equal to the blade pitch completely misses the propeller and duct loads. Alternatively, the propeller thrust and torque are well predicted for the advance ratios higher than when using the wake alignment model without gap pitch correction. For the advance ratios lower than a significant improvement in the comparison with the experiments is obtained with the wake alignment model using a reduced pitch for the gap strip.
Although the assumptions of constant duct boundary-layer thickness and gap strip pitch independent of the inflow conditions are questionable, a reasonable to good agreement of the propeller forces is obtained with the wake alignment model when compared with the experiments. For example, at the differences between the measured and the predicted propeller thrust reduce from 20% to 7% by applying the gap pitch reduction. For the propeller torque, the differences decrease from 12% to 0.3% with the reduced gap pitch. A smaller influence of the gap pitch is observed for the higher advance coefficients, which is due to the decrease of the tip vortex strength. The duct thrust coefficient agrees well with the measurements for low advance coefficients. For high advance coefficients, an over-prediction of the duct thrust is seen, which is due to the occurrence of flow separation on the outer side of the duct and it is not modelled in the inviscid method.
A good agreement of the propeller forces with the experimental data is obtained with the viscous calculations using code ReFRESCO for advance ratios up to . In this range the differences are in the order of 1%. This agreement legitimates the use of RANS simulations for the present comparison study.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}