Semi-Active Structural Control of Offshore Wind Turbines Considering Damage Development


Abstract
:1. Introduction
2. Model Description
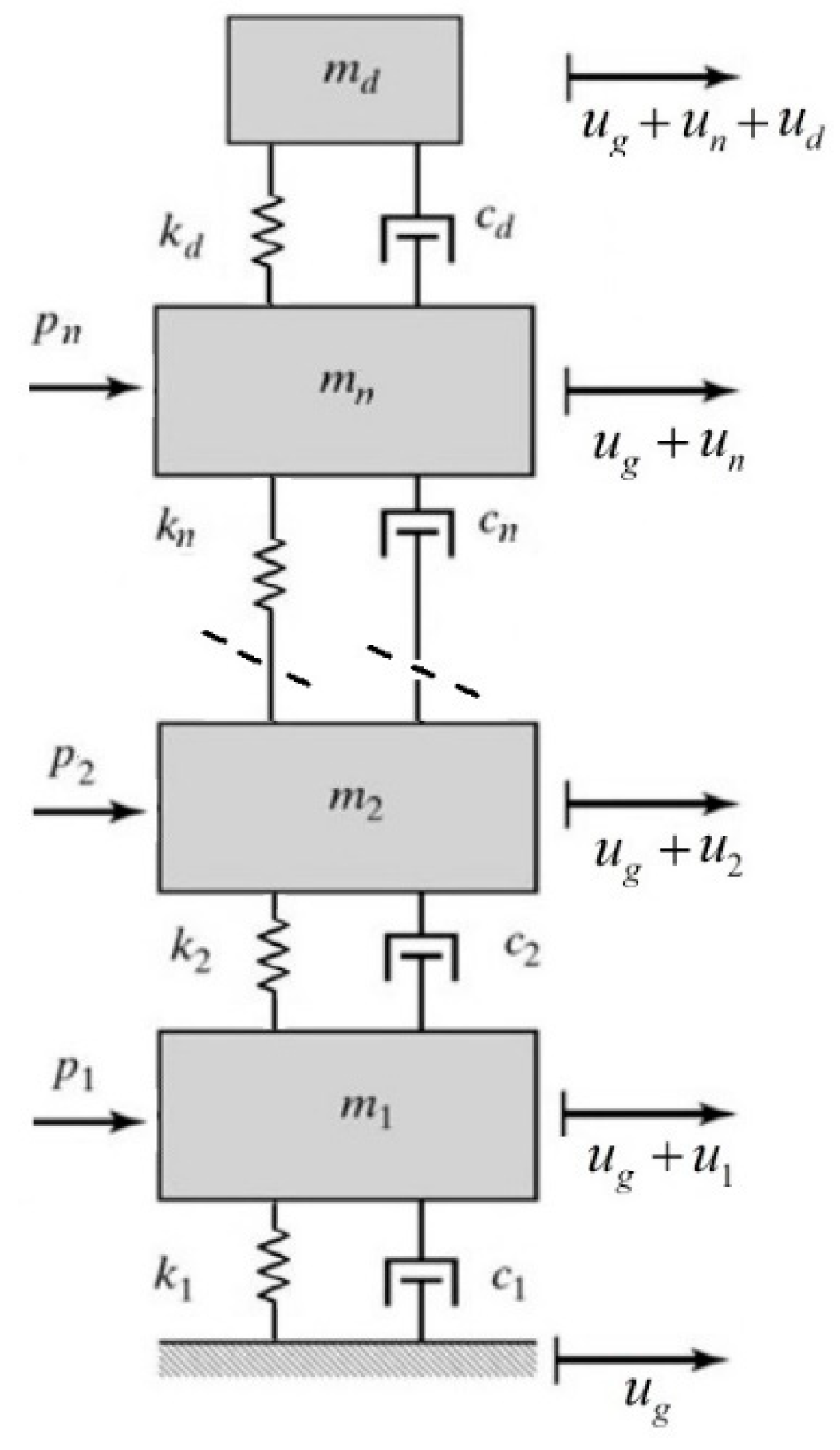
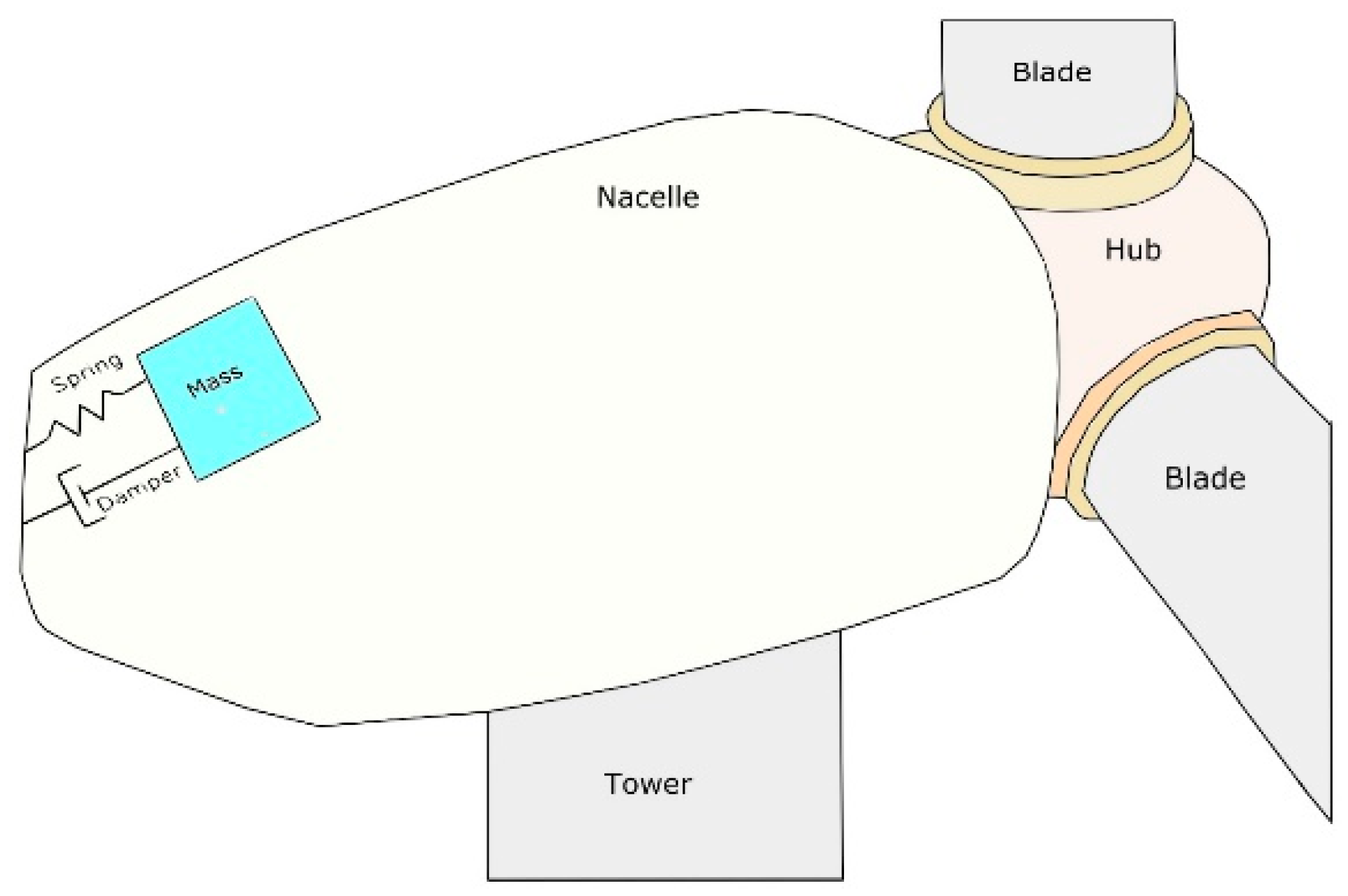
2.1. Tuned Mass Damper Systems
2.2. Semi-Active Vibration Control Algorithm
2.2.1. Varying Stiffness
2.2.2. Varying Damping
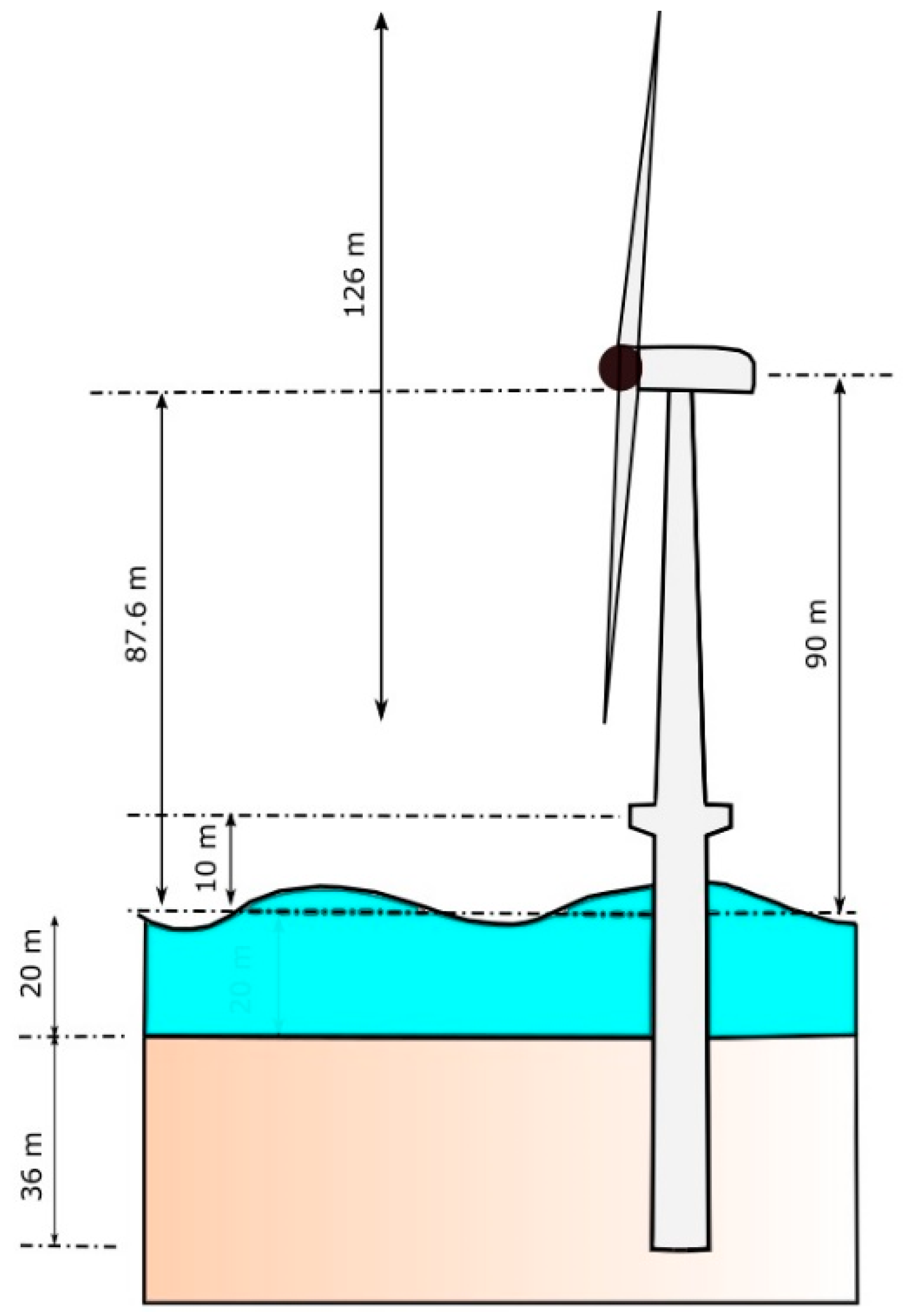
2.3. NREL 5 MW Wind Turbine
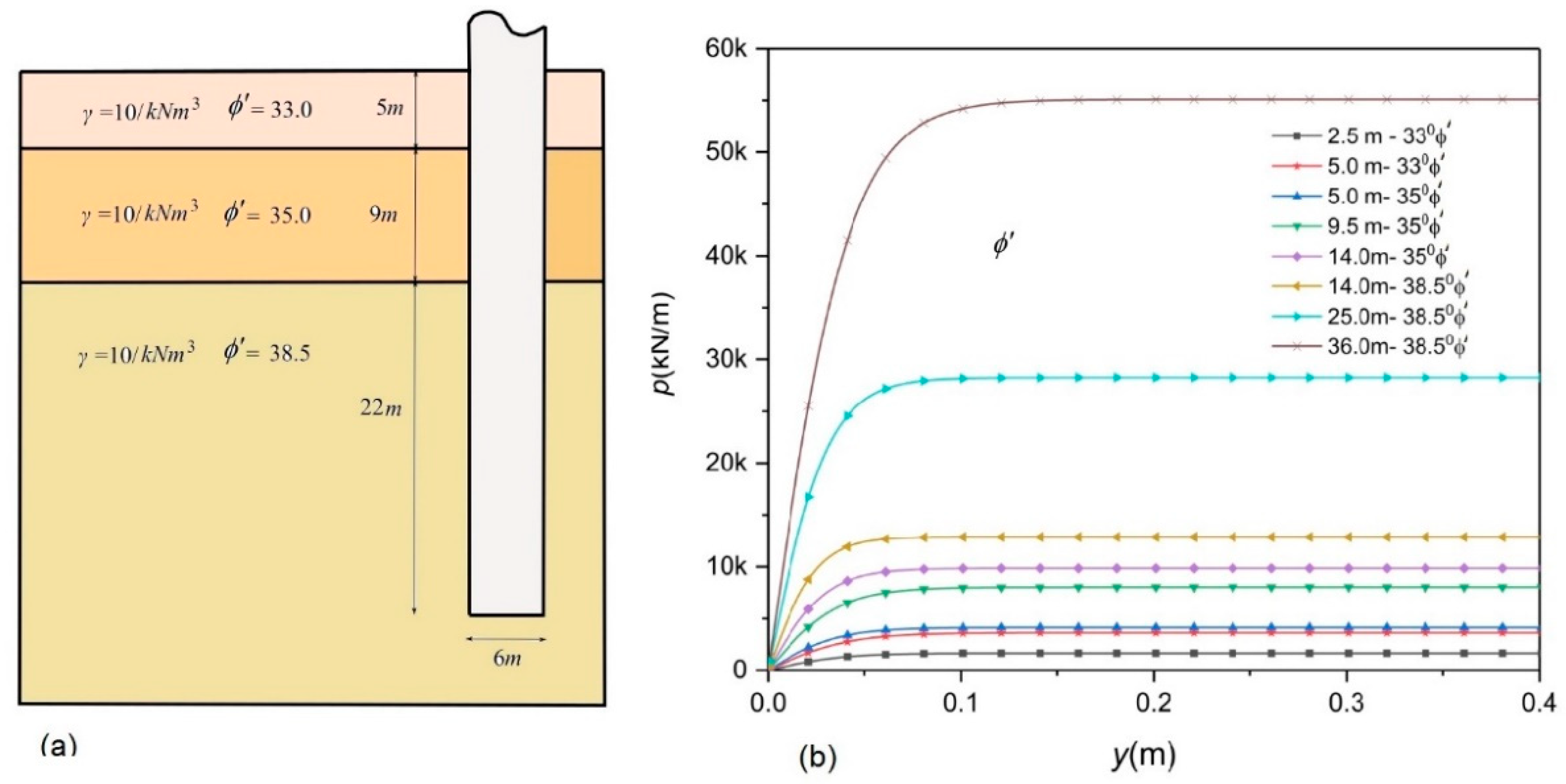
2.4. Soil–Pile Interaction
3. Loading
3.1. Wind
3.2. Sea Wave Load
3.3. Seismic Excitation
4. Numerical Results and Discussions
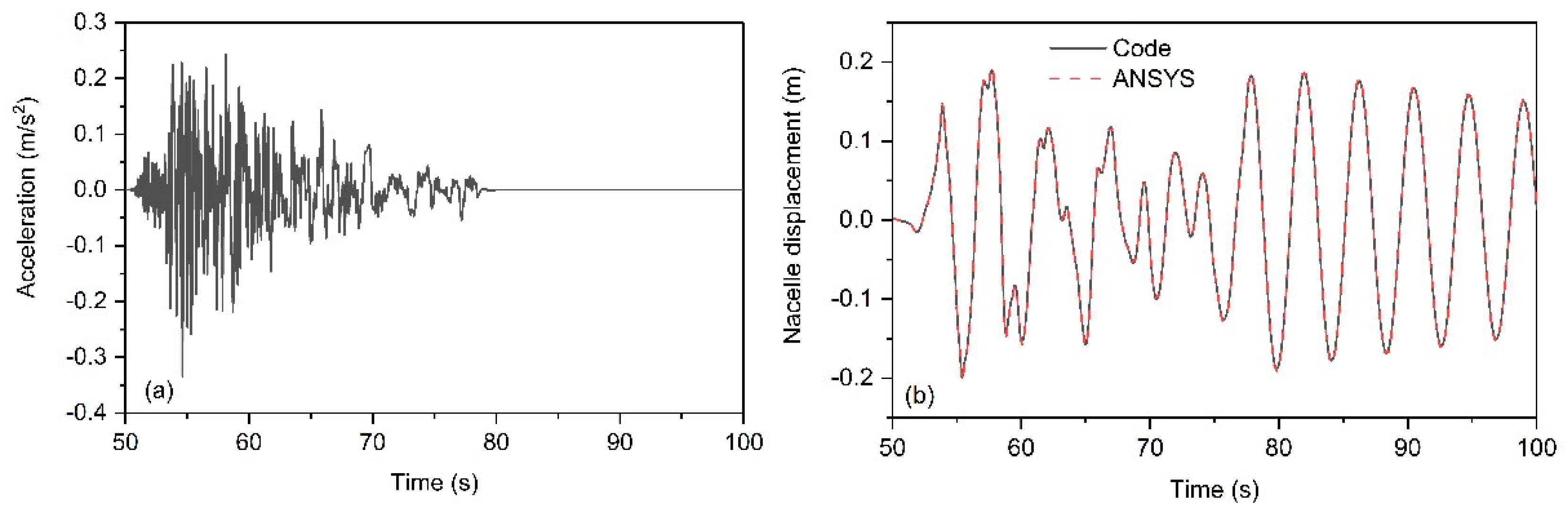
4.1. Model Verification
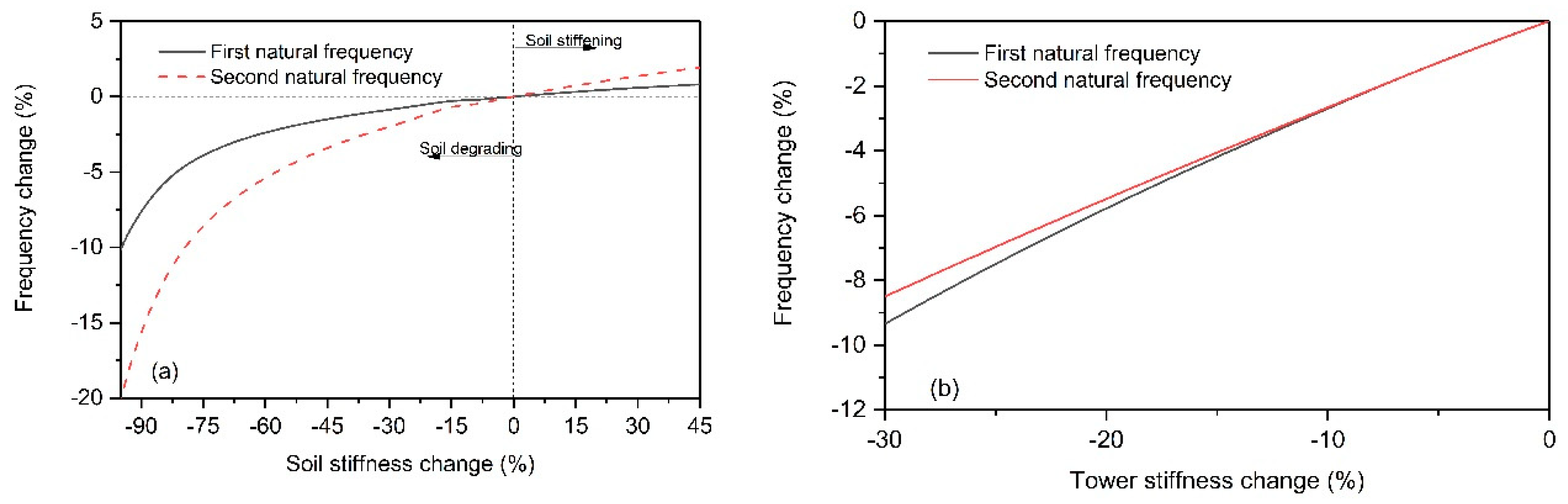
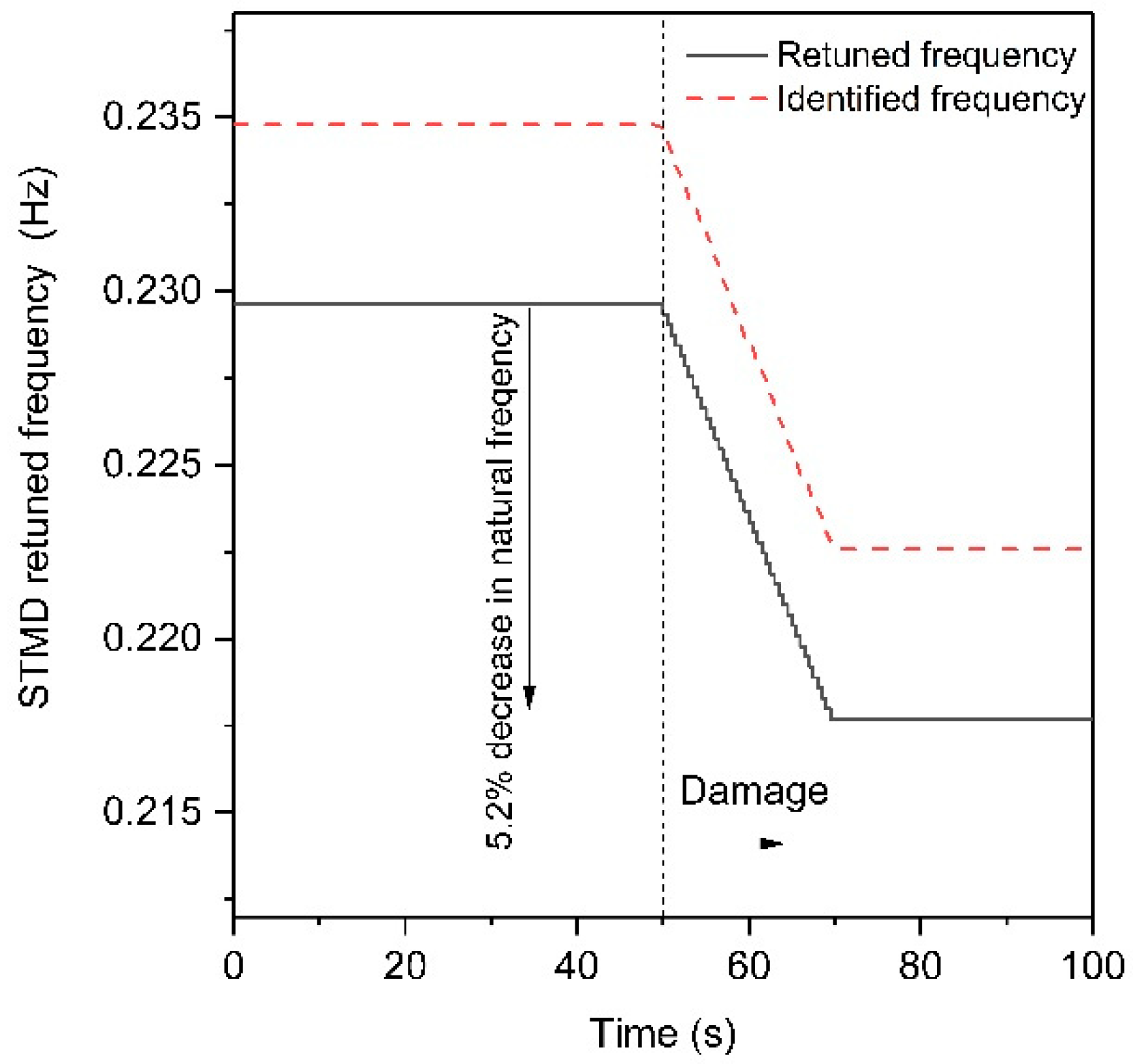
4.2. Damage Development
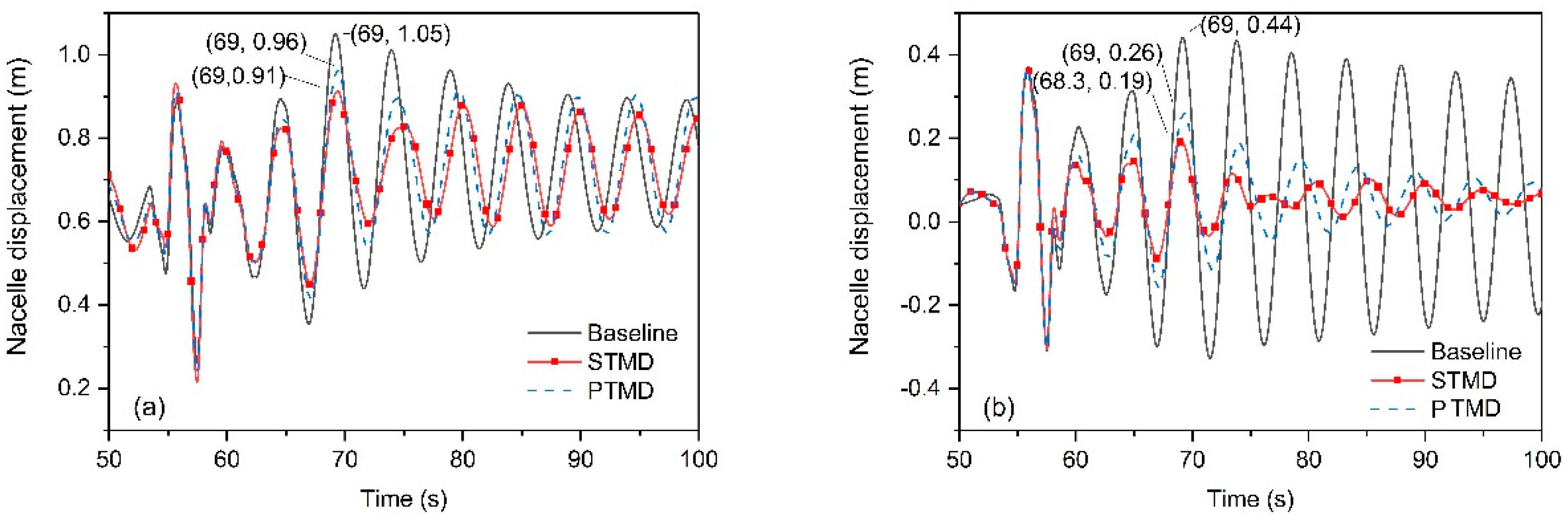
4.3. Response to a Single Seismic Record
4.4. Response to a Seismic Record Set
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Symans, M.D.; Constantinou, M.C. Semi-active control systems for seismic protection of structures: A state-of-the-art review. Eng. Struct. 1999, 21, 469–487. [Google Scholar] [CrossRef]
- Chen, J.-L.; Georgakis, C.T. Spherical tuned liquid damper for vibration control in wind turbines. J. Vib. Control. 2013, 21, 1875–1885. [Google Scholar] [CrossRef]
- Housner, G.W.; Bergman, L.A.; Caughey, T.K.; Chassiakos, A.G.; Claus, R.O.; Masri, S.F.; Skelton, R.E.; Soong, T.T.; Spencer, B.F.; Yao, J.T.P. Structural Control: Past, Present, and Future. J. Eng. Mech. 1997, 123, 897–971. [Google Scholar] [CrossRef]
- Soong, T.T.; Spencer, B.F. Supplemental energy dissipation: state-of-the-art and state-of-the-practice. Eng. Struct. 2002, 24, 243–259. [Google Scholar] [CrossRef]
- Enevoldsen, I.; Mørk, K.J. Effects of a Vibration Mass Damper in a Wind Turbine Tower*. Mech. Struct. Mach. 1996, 24, 155–187. [Google Scholar] [CrossRef]
- Murtagh, P.J.; Ghosh, A.; Basu, B.; Broderick, B.M. Passive control of wind turbine vibrations including blade/tower interaction and rotationally sampled turbulence. Wind Energy 2008, 11, 305–317. [Google Scholar] [CrossRef]
- Colwell, S.; Basu, B. Tuned liquid column dampers in offshore wind turbines for structural control. Eng. Struct. 2009, 31, 358–368. [Google Scholar] [CrossRef]
- Stewart, G.M.; Lackner, M.A. The impact of passive tuned mass dampers and wind–wave misalignment on offshore wind turbine loads. Eng. Struct. 2014, 73, 54–61. [Google Scholar] [CrossRef]
- Stewart, G.; Lackner, M. Offshore wind turbine load reduction employing optimal passive tuned mass damping systems. IEEE Transact. Control. Syst. Technol. 2013, 21, 1090–1104. [Google Scholar] [CrossRef]
- Dinh, V.N.; Basu, B. Passive control of floating offshore wind turbine nacelle and spar vibrations by multiple tuned mass dampers. Struct. Control. Health Monit. 2014, 22, 152–176. [Google Scholar] [CrossRef]
- Lackner, M.; Rotea, M.; Saheba, R. Active structural control of offshore wind turbines. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010. [Google Scholar]
- Fitzgerald, B.; Basu, B.; Nielsen, S.R.K. Active tuned mass dampers for control of in-plane vibrations of wind turbine blades. Struct. Control. Health Monit. 2013, 20, 1377–1396. [Google Scholar] [CrossRef]
- Fitzgerald, B.; Basu, B. Active tuned mass damper control of wind turbine nacelle/tower vibrations with damaged foundations. Key Eng. Mater. 2013, 569–570, 660–667. [Google Scholar] [CrossRef]
- Staino, A.; Basu, B. Dynamics and control of vibrations in wind turbines with variable rotor speed. Eng. Struct. 2013, 56, 58–67. [Google Scholar] [CrossRef]
- Krenk, S.; Svendsen, M.N.; Høgsberg, J. Resonant vibration control of three-bladed wind turbine rotors. AIAA J. 2012, 50, 148–161. [Google Scholar] [CrossRef]
- Maldonado, V.; Boucher, M.; Ostman, R.; Amitay, M. Active vibration control of a wind turbine blade using synthetic jets. Int. J. Flow Control. 2009, 1, 227–238. [Google Scholar] [CrossRef]
- Fitzgerald, B.; Basu, B. Cable connected active tuned mass dampers for control of in-plane vibrations of wind turbine blades. J. Sound Vib. 2014, 333, 5980–6004. [Google Scholar] [CrossRef]
- Kim, S.-M.; Wang, S.; Brennan, M.J. Optimal and robust modal control of a flexible structure using an active dynamic vibration absorber. Smart Mater. Struct. 2011, 20, 045003. [Google Scholar] [CrossRef]
- Yalla, S.K.; Kareem, A.; Kantor, J.C. Semi-active tuned liquid column dampers for vibration control of structures. Eng. Struct. 2001, 23, 1469–1479. [Google Scholar] [CrossRef]
- Hrovat, D.; Barak, P.; Rabins, M. Semi-active versus passive or active tuned mass dampers for structural control. J. Eng. Mech. 1983, 109, 691–705. [Google Scholar] [CrossRef]
- Sun, C.; Nagarajaiah, S. Study on semi-active tuned mass damper with variable damping and stiffness under seismic excitations. Struct. Control. Health Monit. 2013, 21, 890–906. [Google Scholar] [CrossRef]
- Karnopp, D.; Crosby, M.J.; Harwood, R. Vibration control using semi-active force generators. J. Eng. Ind. 1974, 96, 619–626. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Sonmez, E. Structures with semiactive variable stiffness single/multiple tuned mass dampers. J. Struct. Eng. 2007, 133, 67–77. [Google Scholar] [CrossRef]
- Kirkegaard, P.H.; Nielsen, S.R.K.; Poulsen, B.L.; Andersen, J.; Pedersen, L.H.; Pedersen, B.J. Semiactive vibration control of a wind turbine tower using an MR damper. In Proceedings of the Fifth European Conference on Structural Dynamics, Munich, Germany, 2–5 September 2002. [Google Scholar]
- Karimi, H.R.; Zapateiro, M.; Luo, N. Semiactive vibration control of offshore wind turbine towers with tuned liquid column dampers using H output feedback control. In Proceedings of the 2010 IEEE International Conference on Control Applications, Yokohama, Japan, 8–10 September 2010. [Google Scholar]
- Arrigan, J.; Pakrashi, V.; Basu, B.; Nagarajaiah, S. Control of flapwise vibrations in wind turbine blades using semi-active tuned mass dampers. Struct. Control. Health Monit. 2010, 18, 840–851. [Google Scholar] [CrossRef] [Green Version]
- Weber, F. Dynamic characteristics of controlled MR-STMDs of Wolgograd Bridge. Smart Mater. Struct. 2013, 22, 095008. [Google Scholar] [CrossRef]
- Sonmez, E.; Nagarajaiah, S.; Sun, C.; Basu, B. A study on semi-active Tuned Liquid Column Dampers (sTLCDs) for structural response reduction under random excitations. J. Sound Vib. 2016, 362, 1–15. [Google Scholar] [CrossRef]
- Sun, C. Semi-active control of monopile offshore wind turbines under multi-hazards. Mech. Syst. Signal Proc. 2018, 99, 285–305. [Google Scholar] [CrossRef]
- Song, B.; Yi, Y.; Wu, J.C. Study on Seismic Dynamic Response of Offshore Wind Turbine Tower with Monopile Foundation Based on M Method. Adv. Mater. Res. 2013, 663, 686–691. [Google Scholar] [CrossRef]
- Abé, M.; Igusa, T. Semi-Active Dynamic Vibration Absorbers For Controlling Transient Response. J. Sound Vib. 1996, 198, 547–569. [Google Scholar] [CrossRef]
- Sun, C. Mitigation of offshore wind turbine responses under wind and wave loading: Considering soil effects and damage. Struct. Control Health Monit. 2018, 25, 1–22. [Google Scholar] [CrossRef]
- Sadek, F.; Mohraz, B.; Taylor, A.W.; Chung, R.M. A method of estimating the parameters of tuned mass dampers for seismic applications. Earthq. Eng. Struct. Dyn. 1997, 26, 617–636. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Office of Energy Efficiency and Renewable Energy: Washington, DC, USA, 2009; Technical Report No. NREL/TP-500-38060.
- Jonkman, J.; Musial, W. Offshore code comparison collaboration (OC3) for IEA task 23 offshore wind technology and deployment. Off. Sci. Technol. Inf. Technol. Rep. 2010, 303, 275–3000. [Google Scholar]
- American Petroleum Institute (API). RP 2A-WSD: Recommended Practice for Planning, Designing and Constructing Fixed Offshore Platforms Working Stress Design; API Publishing Services: Short Hills, NJ, USA, 2000. [Google Scholar]
- DNV. DNV-OS-J101 Design of Offshore Wind Turbine Structures; DNV: Oslo, Norway, 2004. [Google Scholar]
- Kaimal, J.; Wyngaard, J.; Izumi, Y.; Cote, O. Spectral characteristics of surface-layer turbulence. Q. J. R. Meteorol. Soc. 1972, 98, 563–589. [Google Scholar] [CrossRef] [Green Version]
- Jonkman, B.J. TurbSim user’s guide: version 1.50. Nrel Rep. Natl Renew. Energy Lab. 2009, 7, 58. [Google Scholar]
- Jonkman, J.M.; Buhl, M.L. SciTech Connect.: FAST User’s Guide-Updated August 2005; Technical Report No. NREL/TP-500-38230; SciTech: Perth, Australia, 2005. [Google Scholar]
- DNV. DNV-RP-C205: Environmental conditions and environmental loads; DNV: Oslo, Norway, 2010; pp. 9–123. [Google Scholar]
- Hasselmann, K. Measurements of wind-wave growth and swell decay during the Joint North Sea Wave Project (JONSWAP). Dtsch.hydrogr.z 1973, 12, 1–95. [Google Scholar]
- Chiou, B.; Darragh, R.; Gregor, N.; Silva, W. NGA Project Strong-Motion Database. Earthq. Spectr. 2008, 24, 23–44. [Google Scholar] [CrossRef]
- Doherty, P.; Gavin, K. Laterally loaded monopile design for offshore wind farms. Proc. Inst. Civ. Eng. Energy 2012, 165, 7–17. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.H.; Lee, S.G.; Lee, I.K. Seismic fragility analysis of 5 MW offshore wind turbine. Renew. Energy 2014, 65, 250–256. [Google Scholar] [CrossRef]
- Achmus, M.; Kuo, Y.-S.; Abdel-Rahman, K. Behavior of monopile foundations under cyclic lateral load. Comput. Geotech. 2009, 36, 725–735. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. IEC 61400-1: Wind Turbines Part 1: Design Requirements, 3rd ed.; IEC: Geneva, Switzerland, 2005. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Turbine | Rated Power, Rotor Orientation | 5 MW, Upwind, 3 Blades |
|---|---|---|
| Control System | Variable Speed, Collective Pitch | |
| Blade | Rotor Diameter, Hub Height | 126 m, 90 m |
| Cut-In, Rated, Cut-Out Wind Speed | 3 m/s, 11.4 m/s, 25 m/s | |
| Cut-In, Rated Rotor Speed | 6.9 rpm, 12.1 rpm | |
| Hub mass, Blade mass | 56,780 kg, 17,740 kg | |
| Nacelle | Nacelle Dimensions | 18 m × 6 m × 6 m |
| Nacelle Mass | 240,000 kg | |
| Tower | Base diameter, base thickness | 6.0 m, 27 mm |
| Top diameter, top thickness | 3.87 m, 19 mm | |
| Tower mass | 347,460 kg |
| Component | Density (kg/m3) | Young’s Modulus (GPa) | Poisson’s Ratio |
|---|---|---|---|
| Tower | 8500 | 210 | 0.3 |
| Monopile | 7850 | 210 | 0.3 |
| ID | Earthquake | Magnitude | Year | Record Station | Soil Type |
|---|---|---|---|---|---|
| 1 | Kobe, Japan | 6.9 | 1995 | Kobe University | B |
| 2 | Northridge-01 | 6.69 | 1994 | 17645 | D |
| 3 | Northridge-Landers | 7.28 | 1992 | 17645 Saticoy St. | D |
| 4 | Northridge-Narrows-01 | 5.99 | 1987 | 17645 Saticoy St. | D |
| 5 | Tabas, Iran | 7.35 | 1978 | Tabas | C |
| 6 | Manjil, Iran | 7.37 | 1990 | Abbar | E |
| 7 | Manjil, Iran | 7.37 | 1990 | Abhar | D |
| 8 | Manjil, Iran | 7.37 | 1990 | Qazvin | C |
| 9 | Manjil, Iran | 7.37 | 1990 | Rudsar | D |
| 10 | Erzican, Turkey | 6.69 | 1992 | Erzincan | D |
| 11 | Loma Prieta | 6.93 | 1989 | Apeel 10-Skyline | D |
| 12 | Loma Prieta | 6.93 | 1989 | Apeel 2-Redwood City | E |
| 13 | Cape Mendocino | 7.01 | 1992 | Cape Mendocino | B |
| 14 | Cape Mendocino | 7.01 | 1992 | Eureka-Myrtle & West | C |
| 15 | Cape Mendocino | 7.01 | 1992 | Fortuna-Fortuna Blvd. | D |
| 16 | Cape Mendocino | 7.01 | 1992 | Petrolia | D |
| 17 | Cape Mendocino | 7.01 | 1992 | Shelter Cove Airport | D |
| 18 | Landers | 7.28 | 1992 | Amboy | C |
| 19 | Landers | 7.28 | 1992 | Baker Fire Station | D |
| 20 | Landers | 7.28 | 1992 | Bell Gardens-Jaboneria | D |
| 21 | Imperial Valley-06 | 6.53 | 1979 | Aeropuerto Mexicali | C |
| 22 | Imperial Valley-06 | 6.53 | 1979 | Agrarias | D |
| 24 | Imperial Valley-06 | 6.53 | 1979 | Bonds Corner | D |
| 24 | Imperial Valley-06 | 6.53 | 1979 | Brawley Airport | C |
| 25 | Imperial Valley-06 | 6.53 | 1979 | Calexico Fire Station | D |
| 26 | Imperial Valley-06 | 6.53 | 1979 | Calipatria Fire Station | D |
| 27 | Imperial Valley-06 | 6.53 | 1979 | Cerro Prieto | D |
| 28 | Imperial Valley-06 | 6.53 | 1979 | Chihuahua | D |
| 29 | Imperial Valley-06 | 6.53 | 1979 | Coachella Canal #4 | C |
| 30 | Imperial Valley-06 | 6.53 | 1979 | Compuertas | C |
| Mode | Code | ANSYS | Dong Hywan Kim et al. [45] |
|---|---|---|---|
| 1nd Fore–aft | 0.235 | 0.234 | 0.234 |
| 1nd Side-to-side | 0.235 | 0.234 | 0.233 |
| 2nd Fore–aft | 1.426 | 1.426 | 1.406 |
| 2nd Side-to-side | 1.426 | 1.426 | 1.515 |
| Wind | Wave | Seismic | ||||
|---|---|---|---|---|---|---|
| Loadcases | Wind Speed at the Hub Height (m/s) | Turbulence Intensity (%) | Wave Period (s) | Significant Wave Height (m) | Starting Instant | Damping |
| LC1 | 11.4 (Operational) | 0 | - | - | 50 s | 1% |
| LC2 | 40.0 (Parked) | 0 | - | - | 50 s | 5% |
| LC3 | 11.4 (Operational) | 14.5 | 9.5 | 5.0 | 50 s | 1% |
| LC4 | 40.0 (Parked) | 11.7 | 11.5 | 7.0 | 50 s | 5% |
| Mass (kg) | kd (N/m) | cd (N/(m/s)) | ωd (Hz) |
|---|---|---|---|
| 20,000 | 41,657 | 10,000 | 0.229 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hemmati, A.; Oterkus, E. Semi-Active Structural Control of Offshore Wind Turbines Considering Damage Development. J. Mar. Sci. Eng. 2018, 6, 102. https://doi.org/10.3390/jmse6030102
Hemmati A, Oterkus E. Semi-Active Structural Control of Offshore Wind Turbines Considering Damage Development. Journal of Marine Science and Engineering. 2018; 6(3):102. https://doi.org/10.3390/jmse6030102
Chicago/Turabian StyleHemmati, Arash, and Erkan Oterkus. 2018. "Semi-Active Structural Control of Offshore Wind Turbines Considering Damage Development" Journal of Marine Science and Engineering 6, no. 3: 102. https://doi.org/10.3390/jmse6030102
APA StyleHemmati, A., & Oterkus, E. (2018). Semi-Active Structural Control of Offshore Wind Turbines Considering Damage Development. Journal of Marine Science and Engineering, 6(3), 102. https://doi.org/10.3390/jmse6030102