Simulation of Ice-Propeller Collision with Cohesive Element Method



Abstract
:1. Introduction
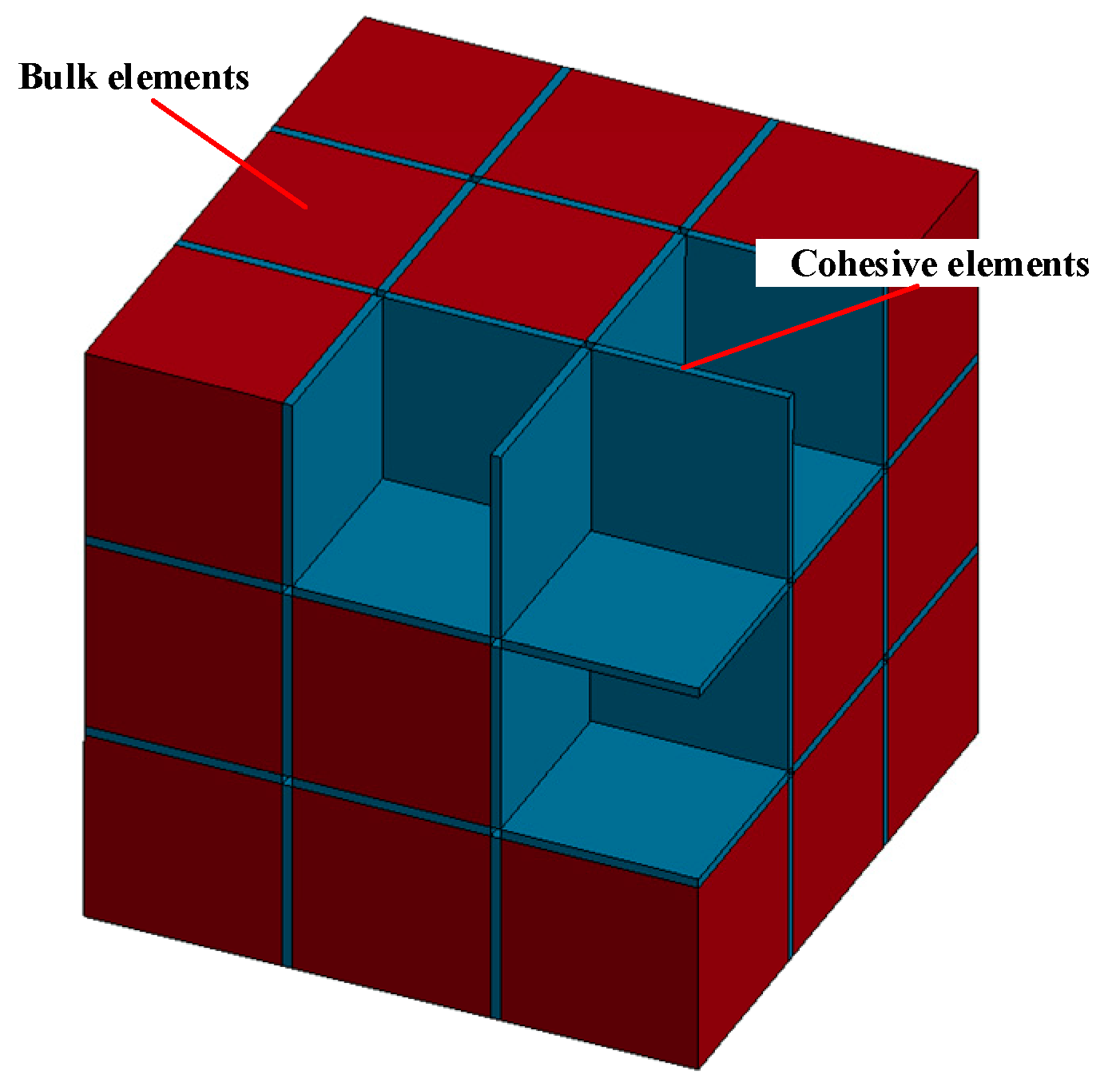
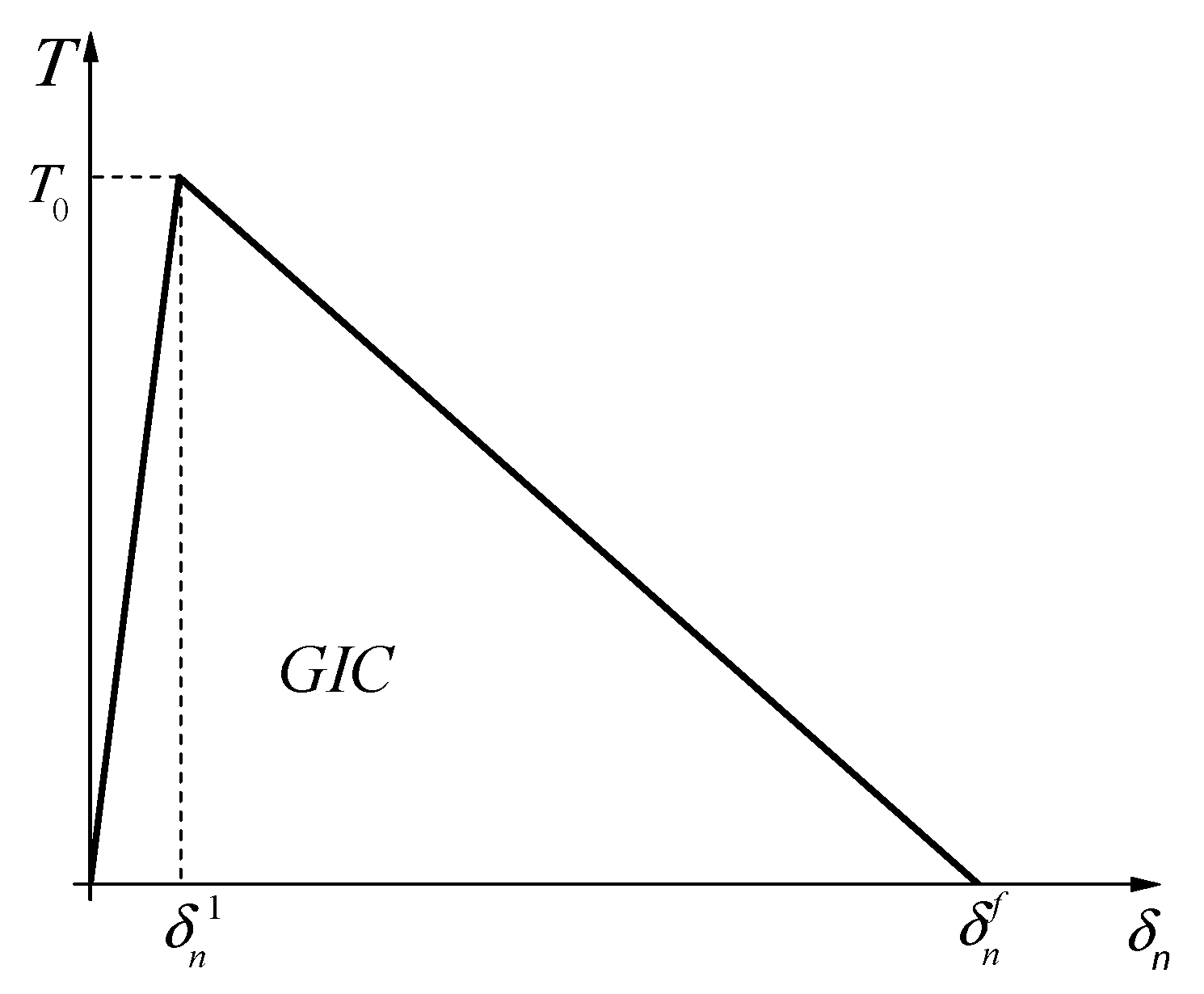
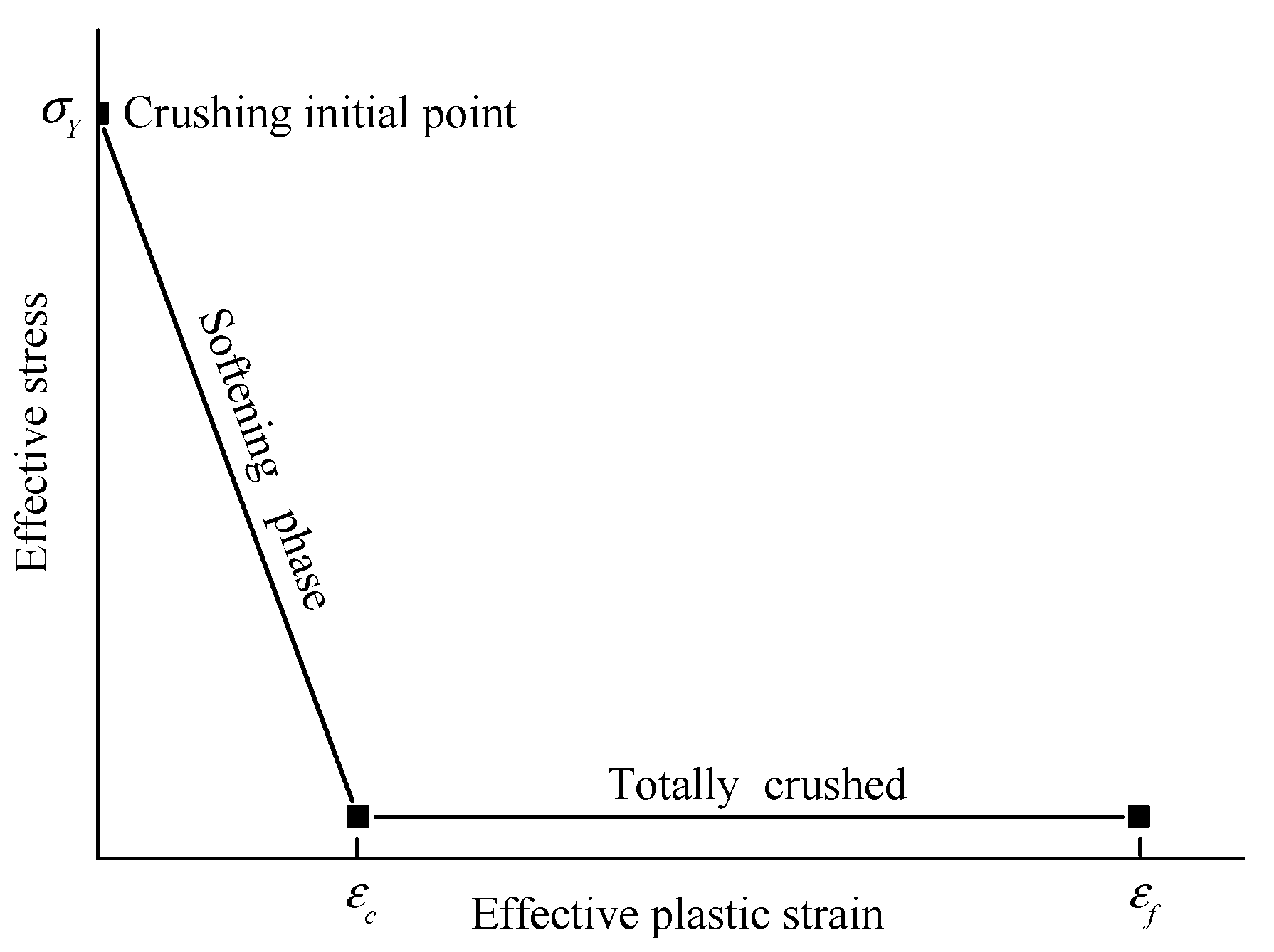
2. Numerical Model
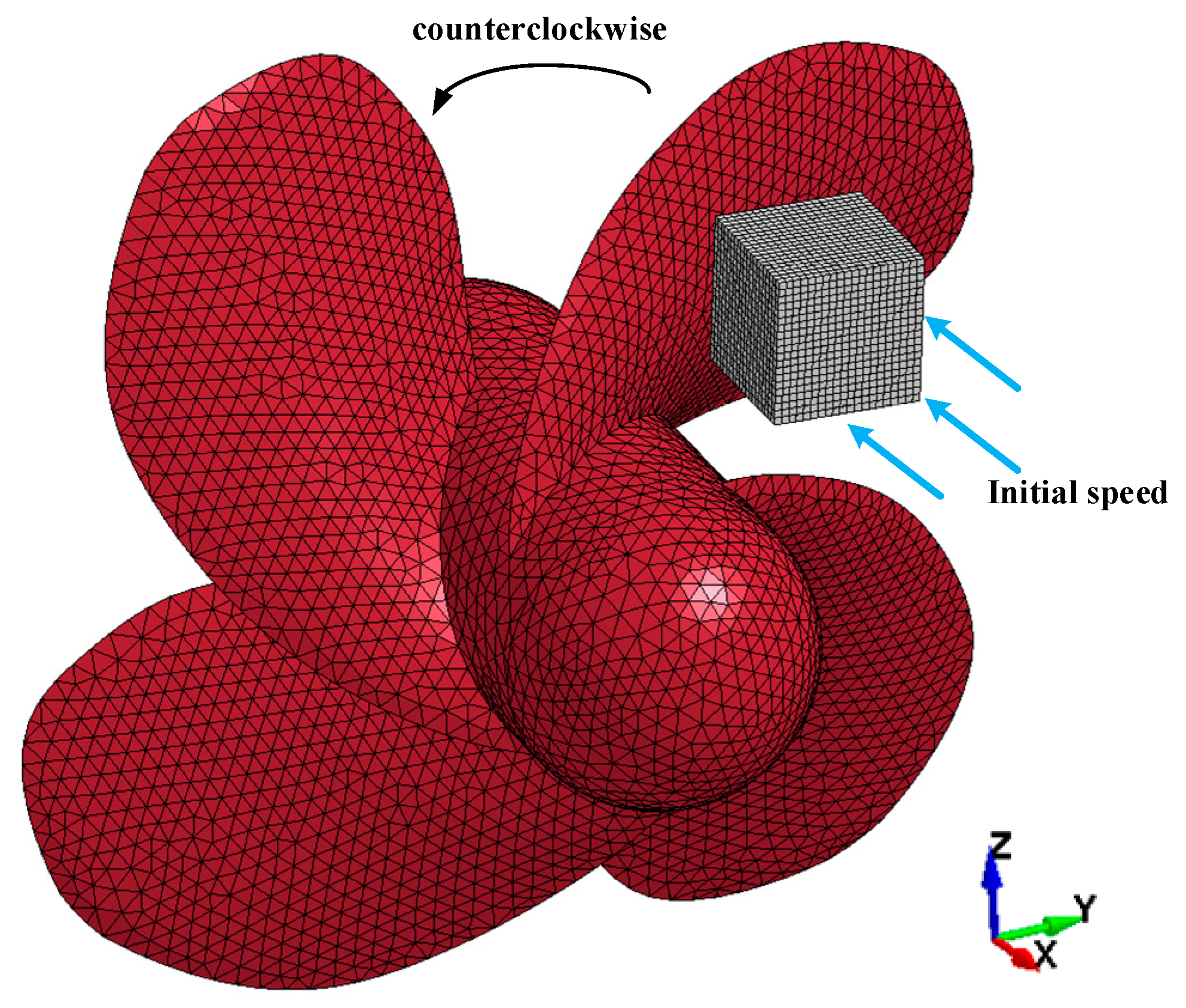
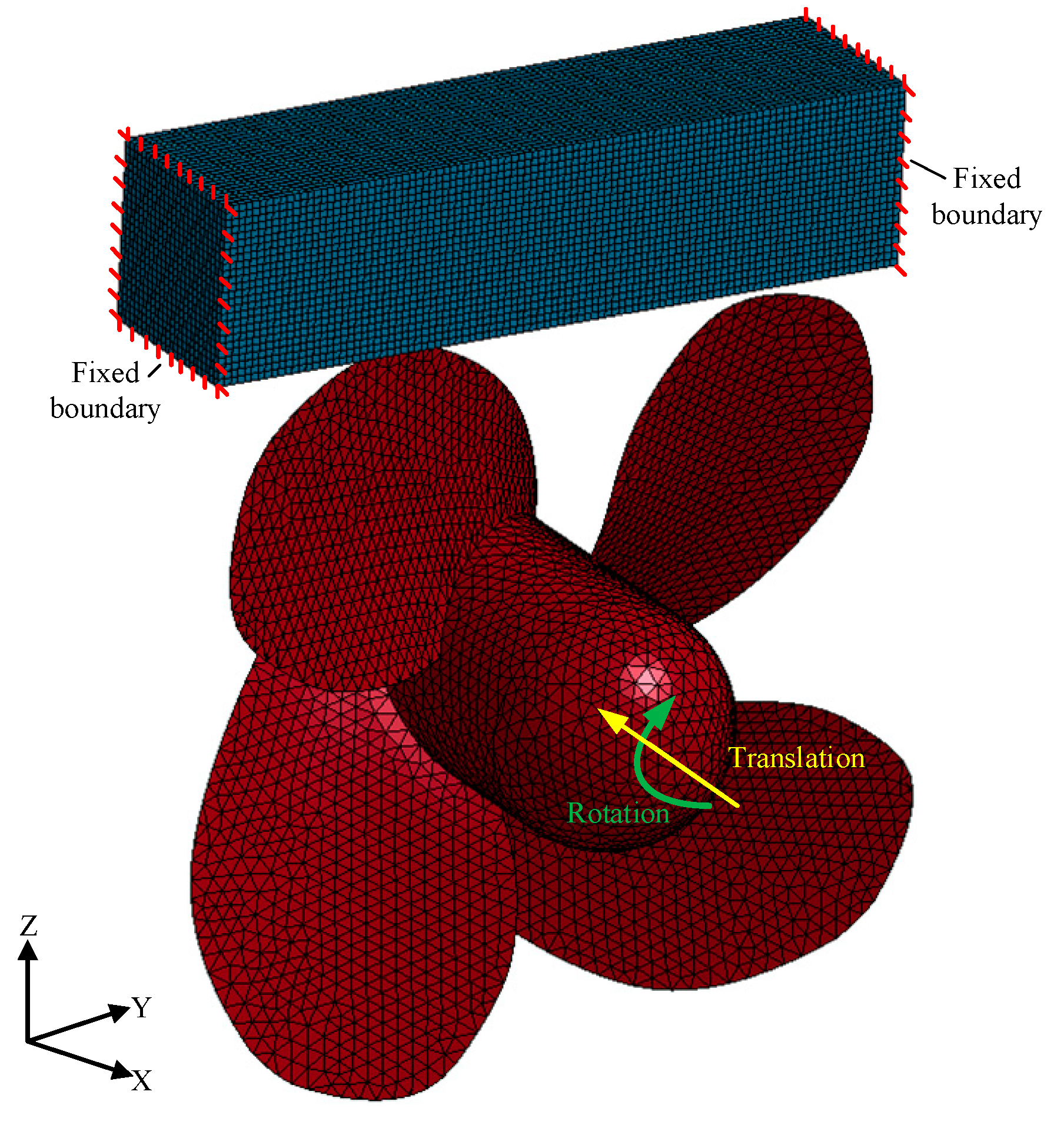
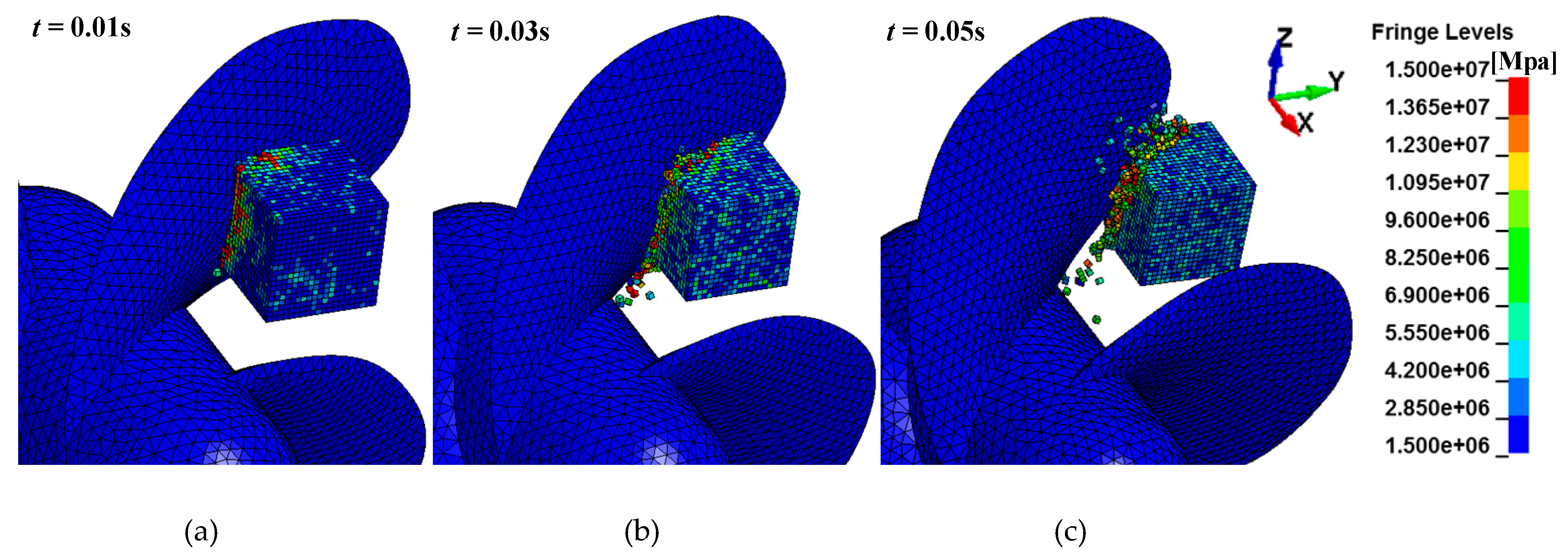
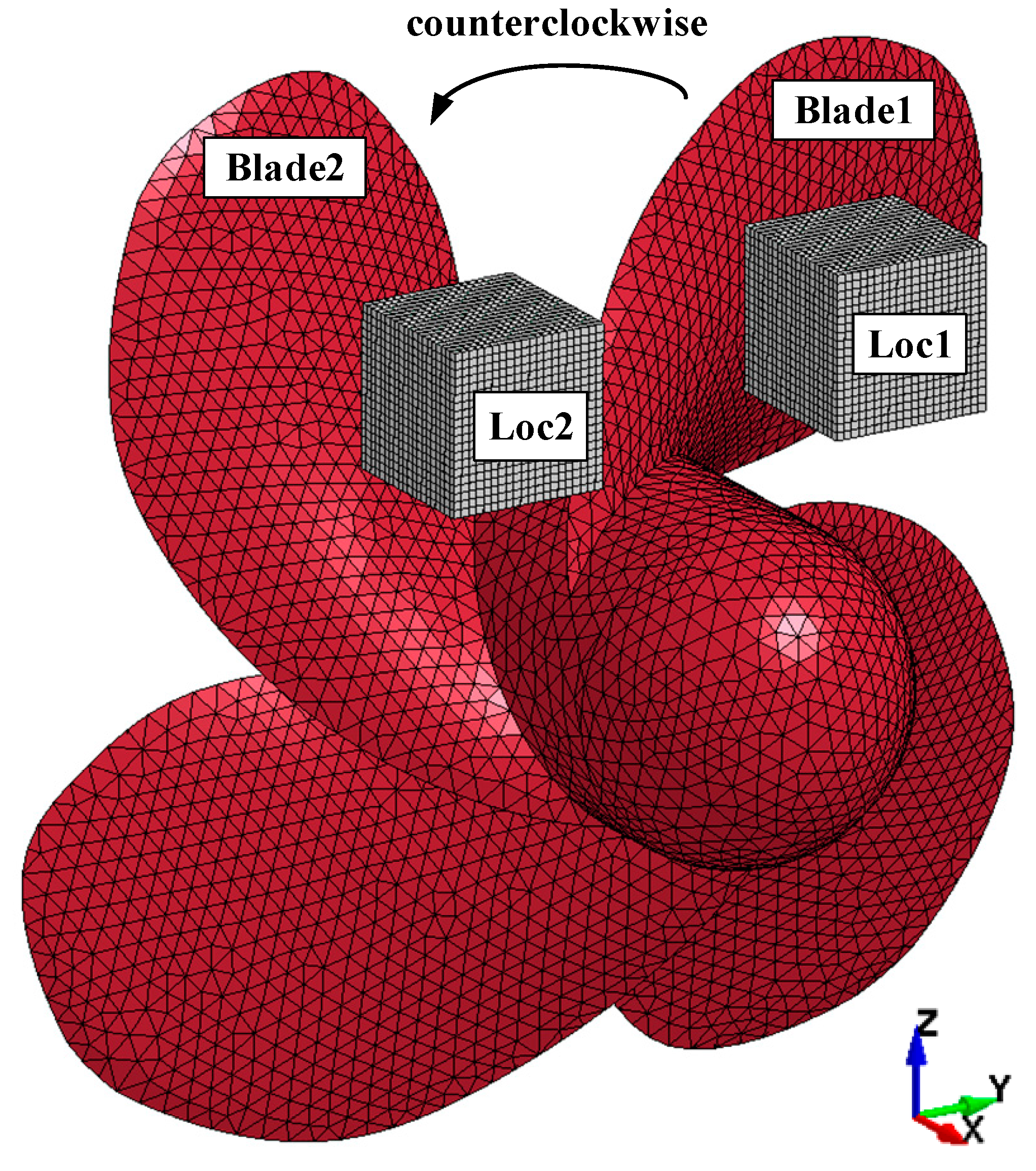
3. Numerical Model of Ice-Propeller Collision
4. Validation Study
4.1. Numerical Validation of Ice Material
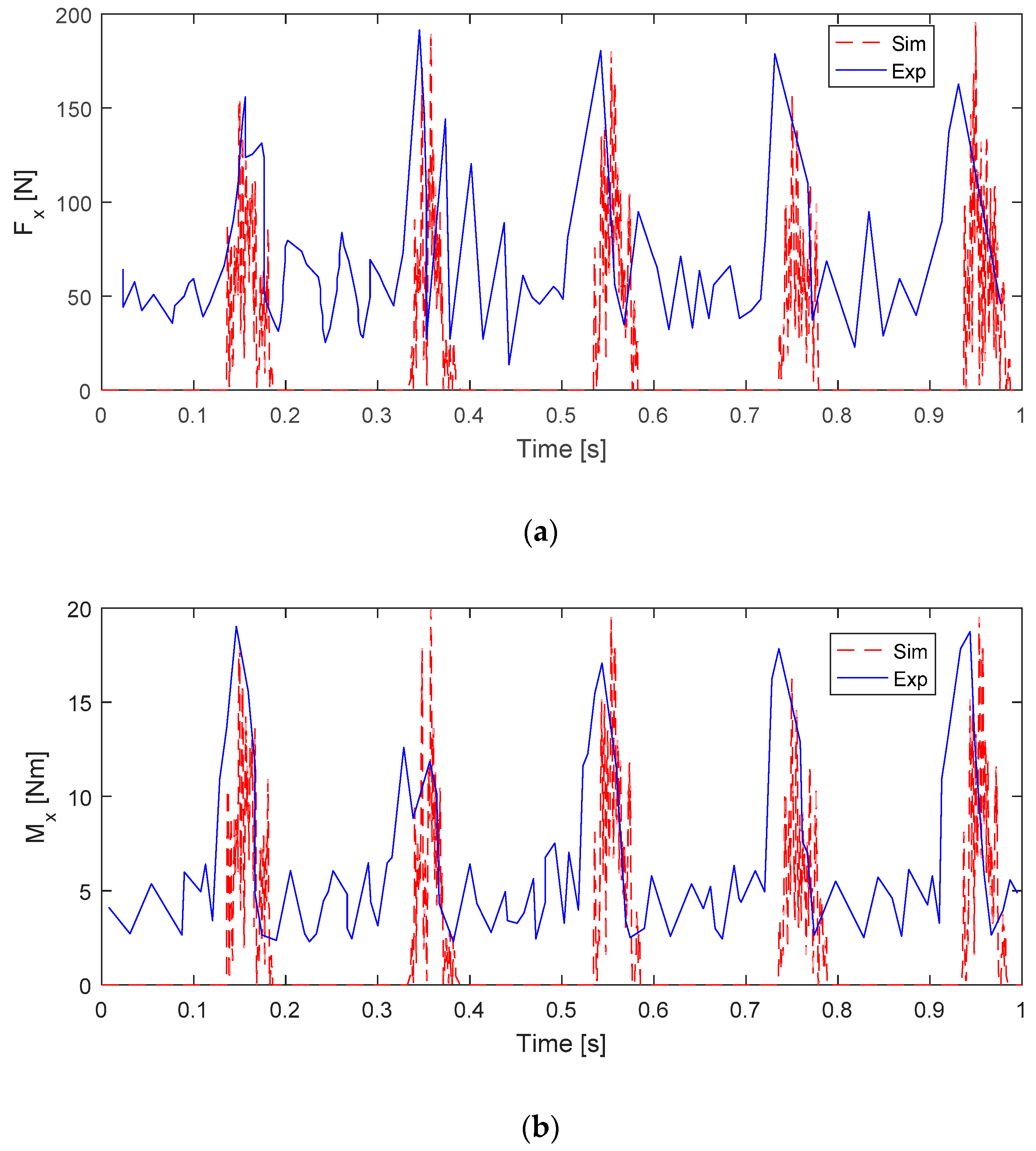
4.2. Validation of Ice-Propeller Milling
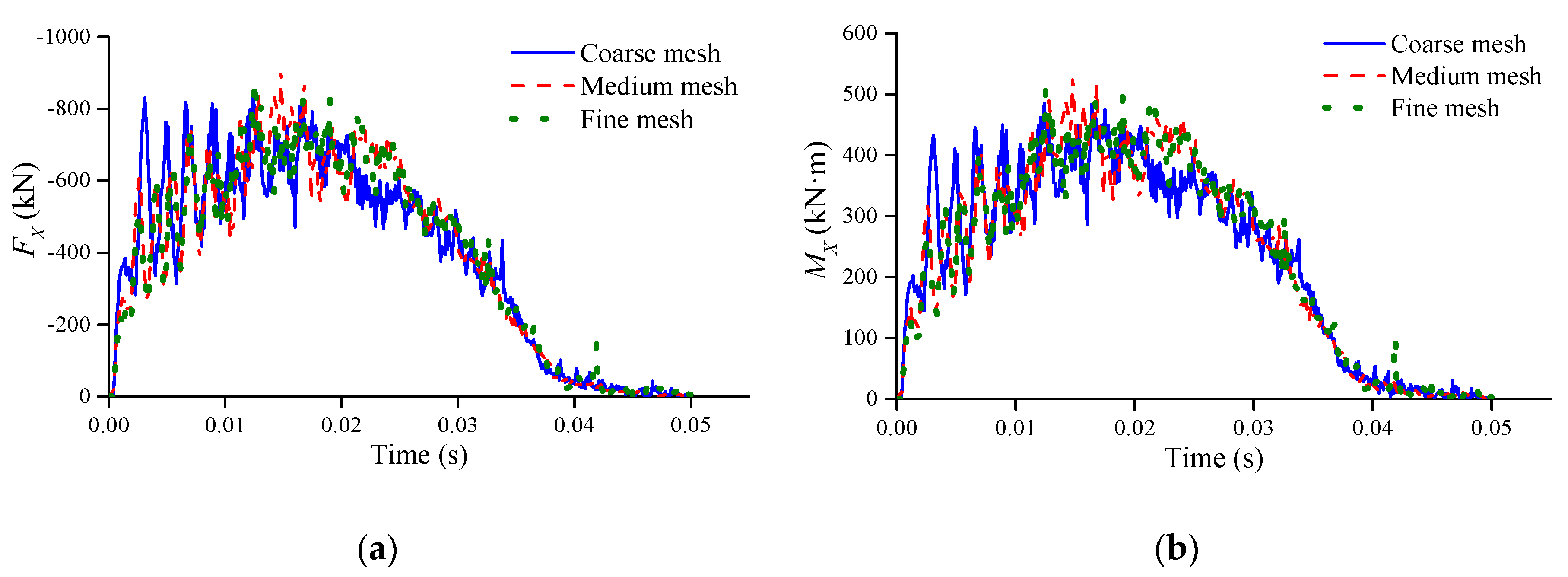
5. Convergence Study
6. Parametric Study
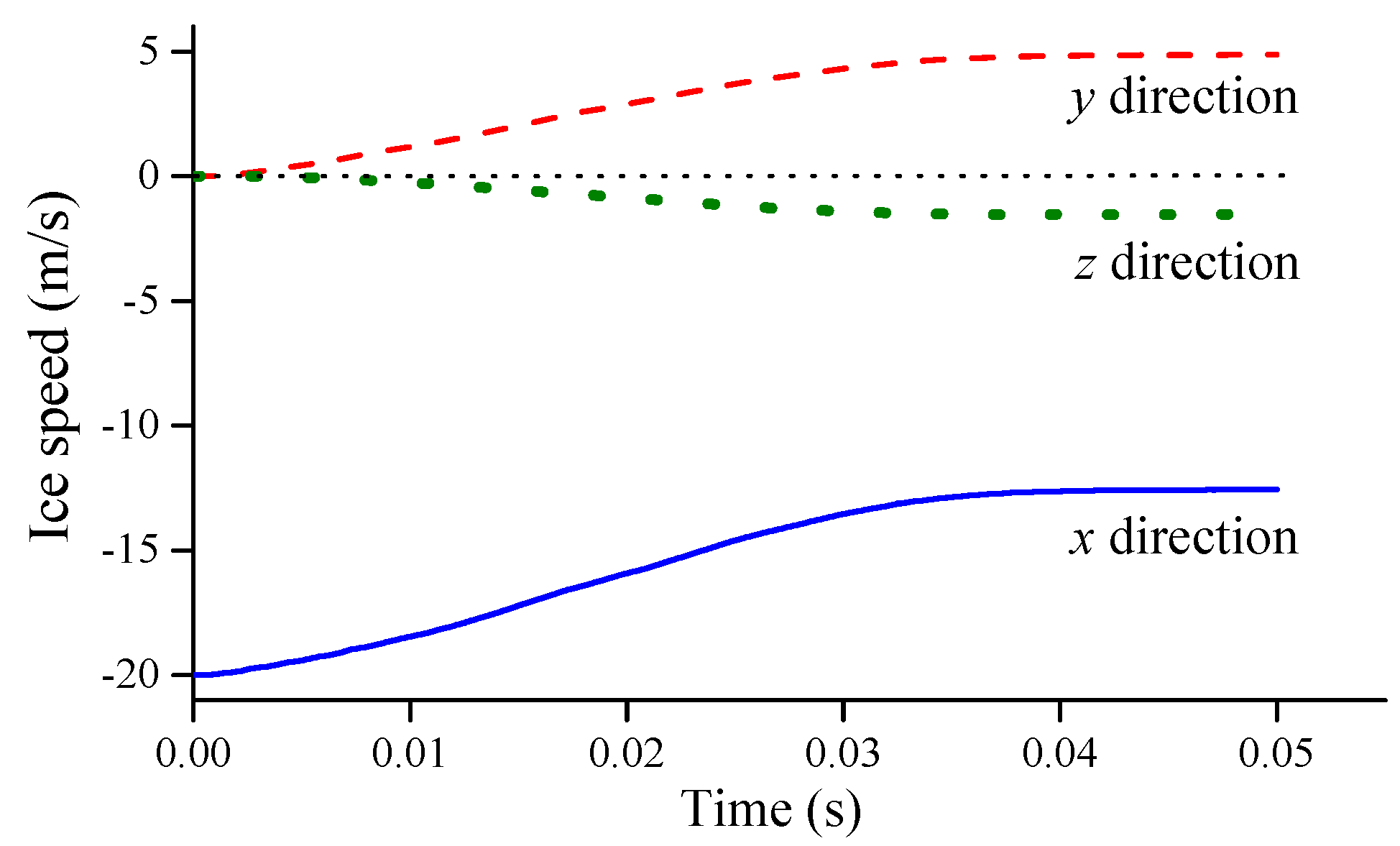
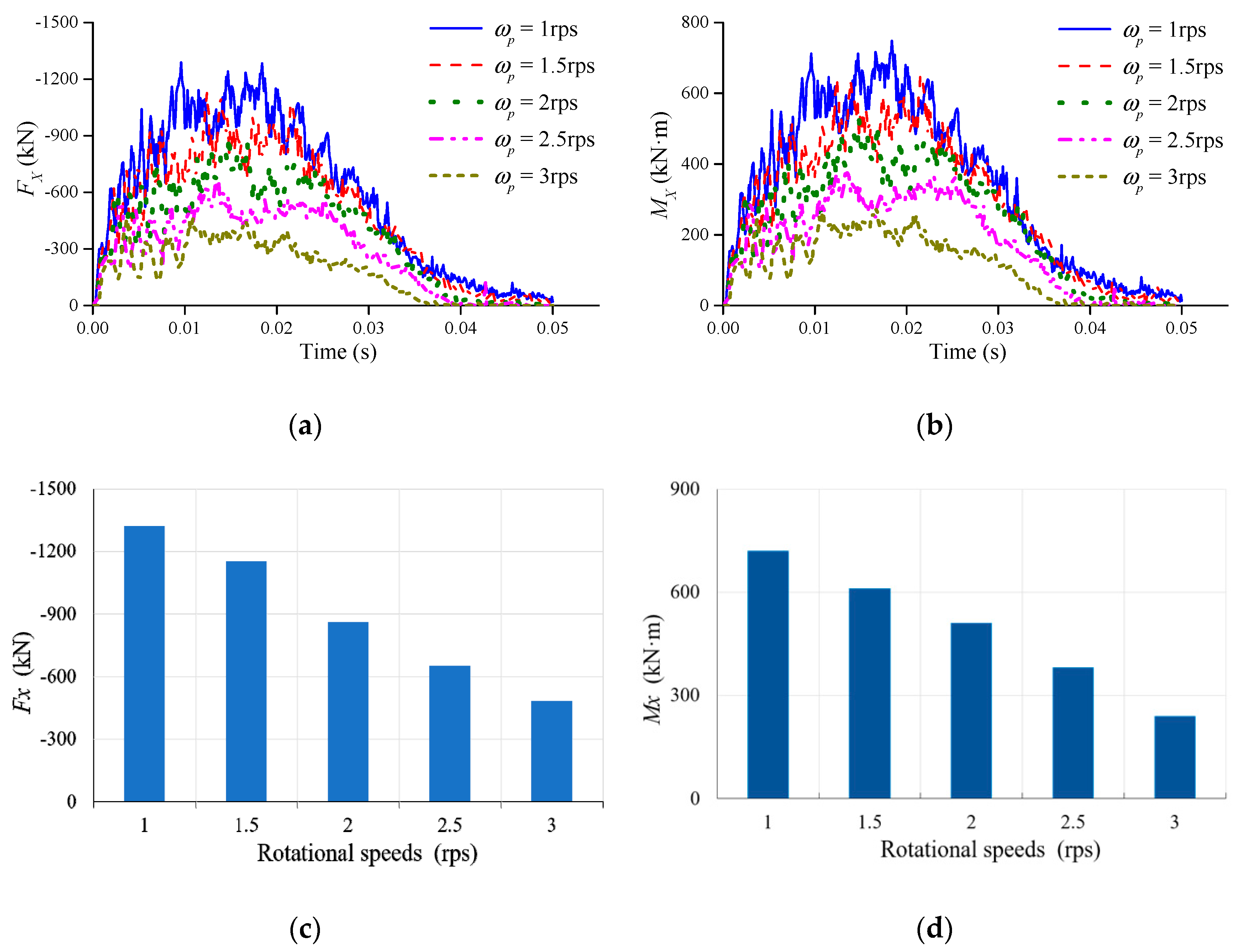
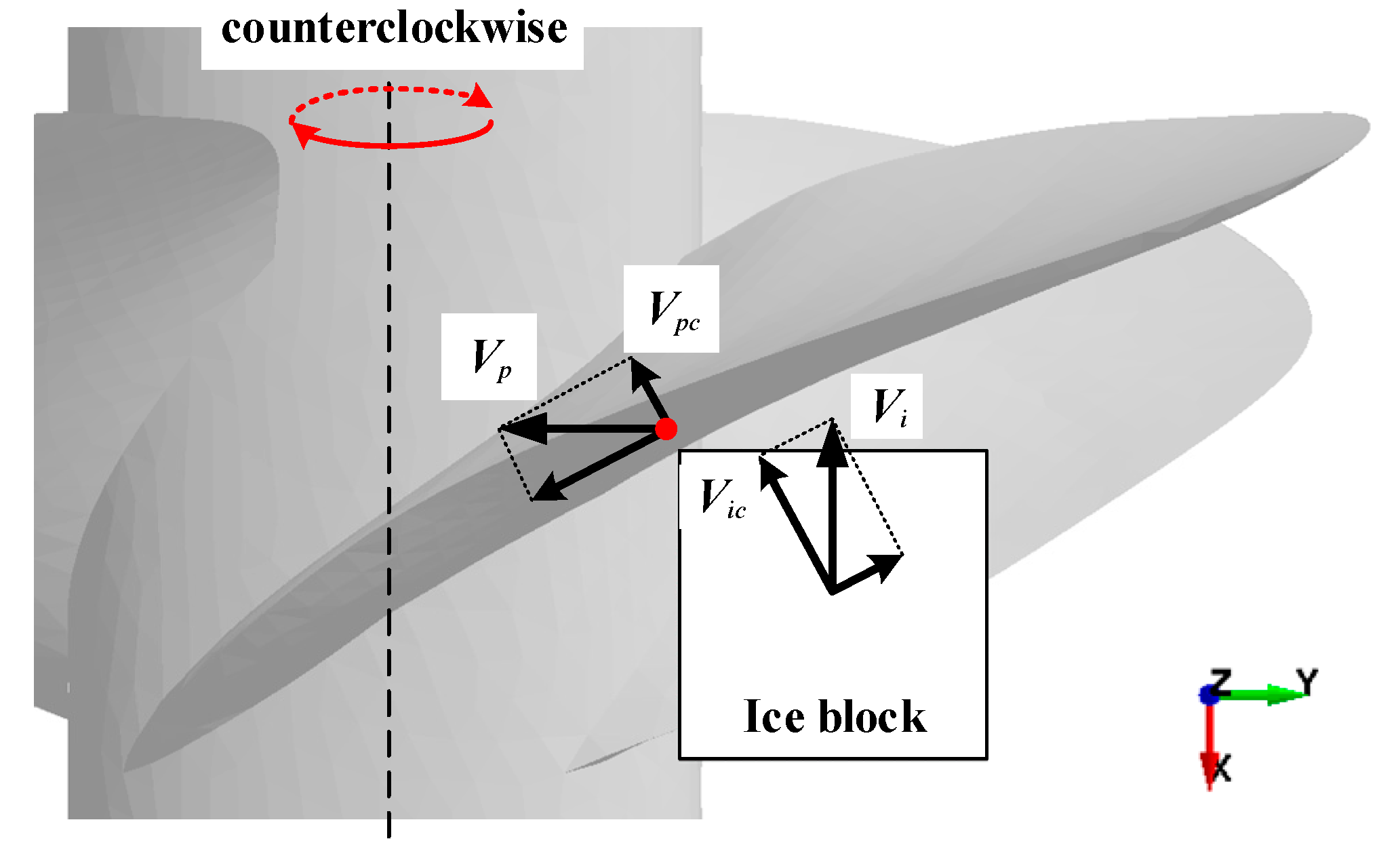
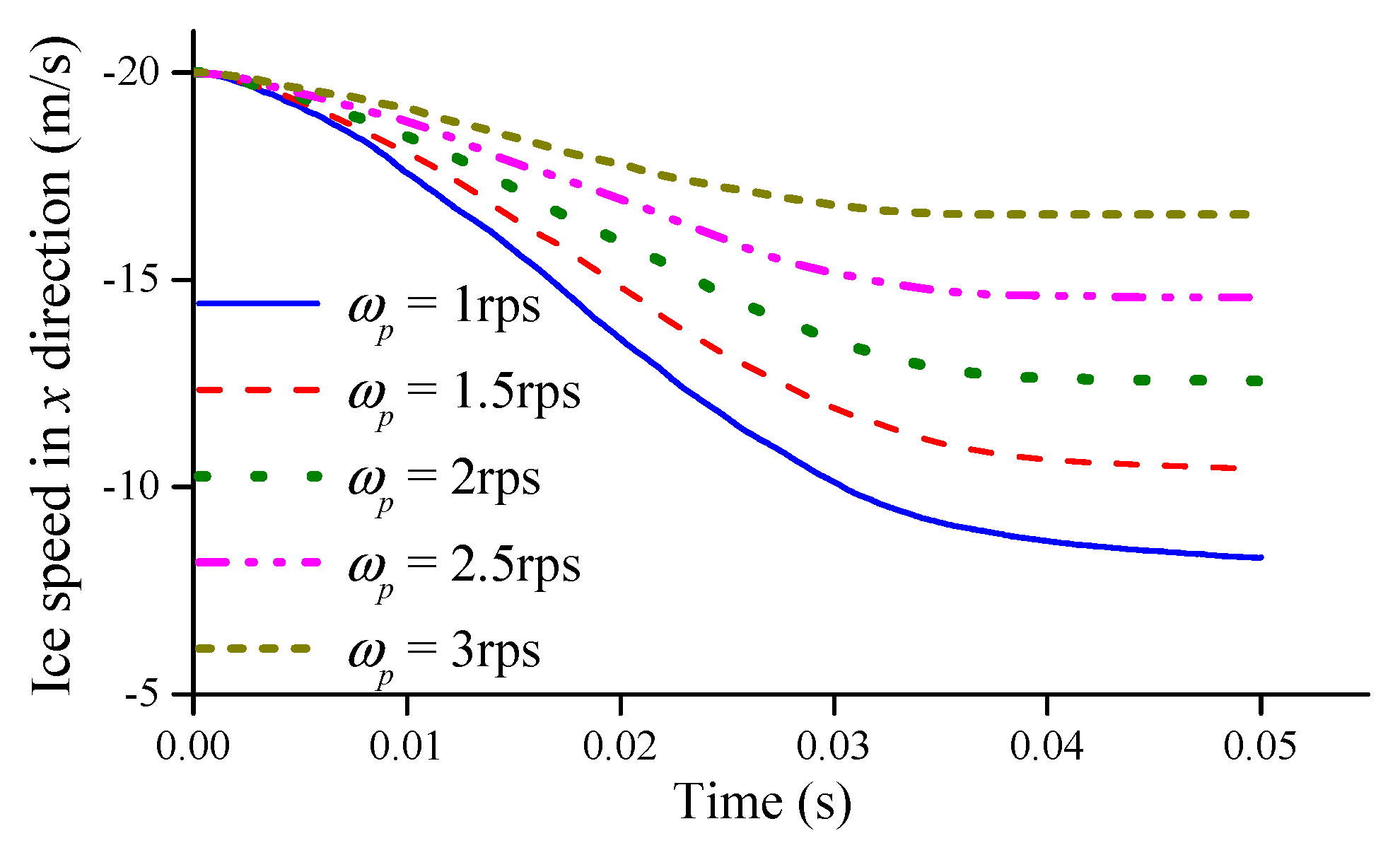
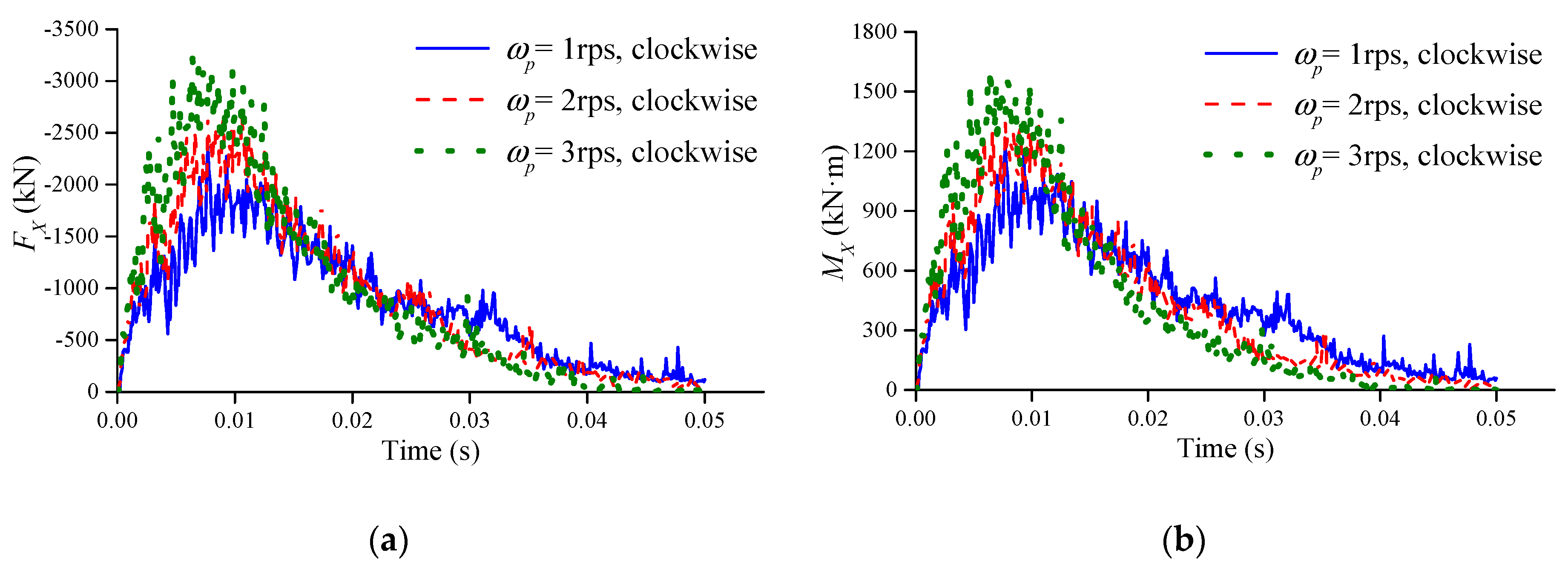
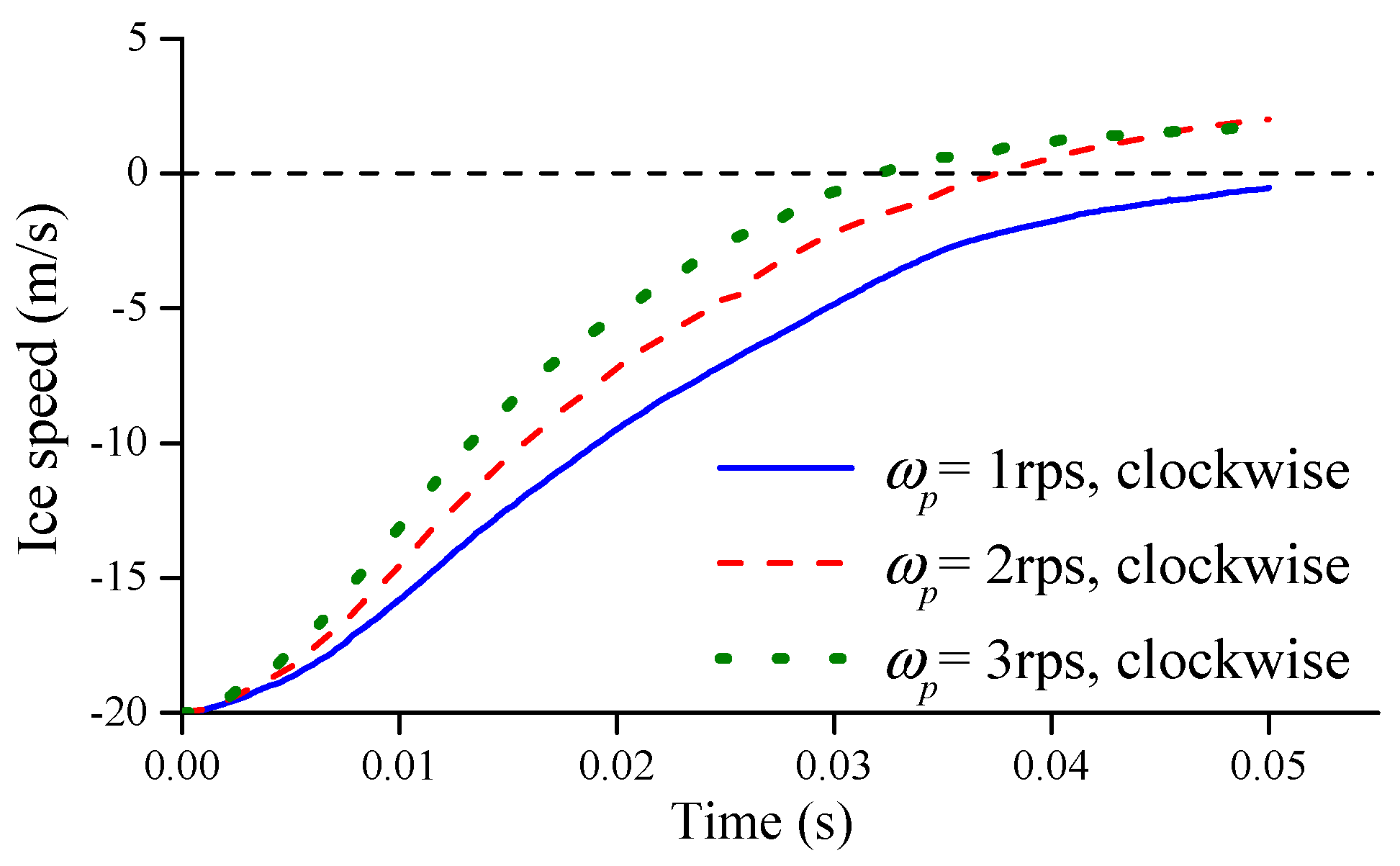
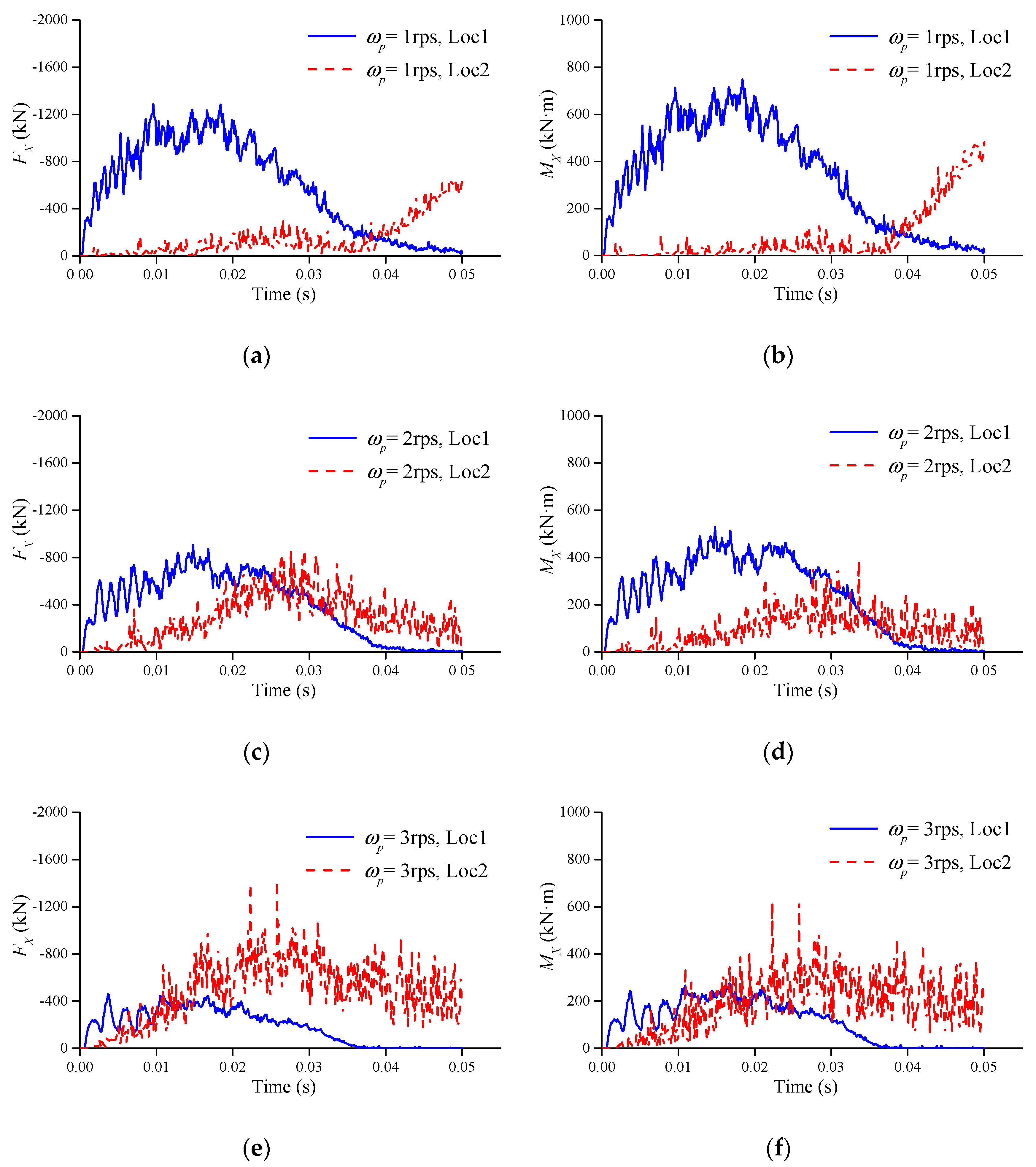
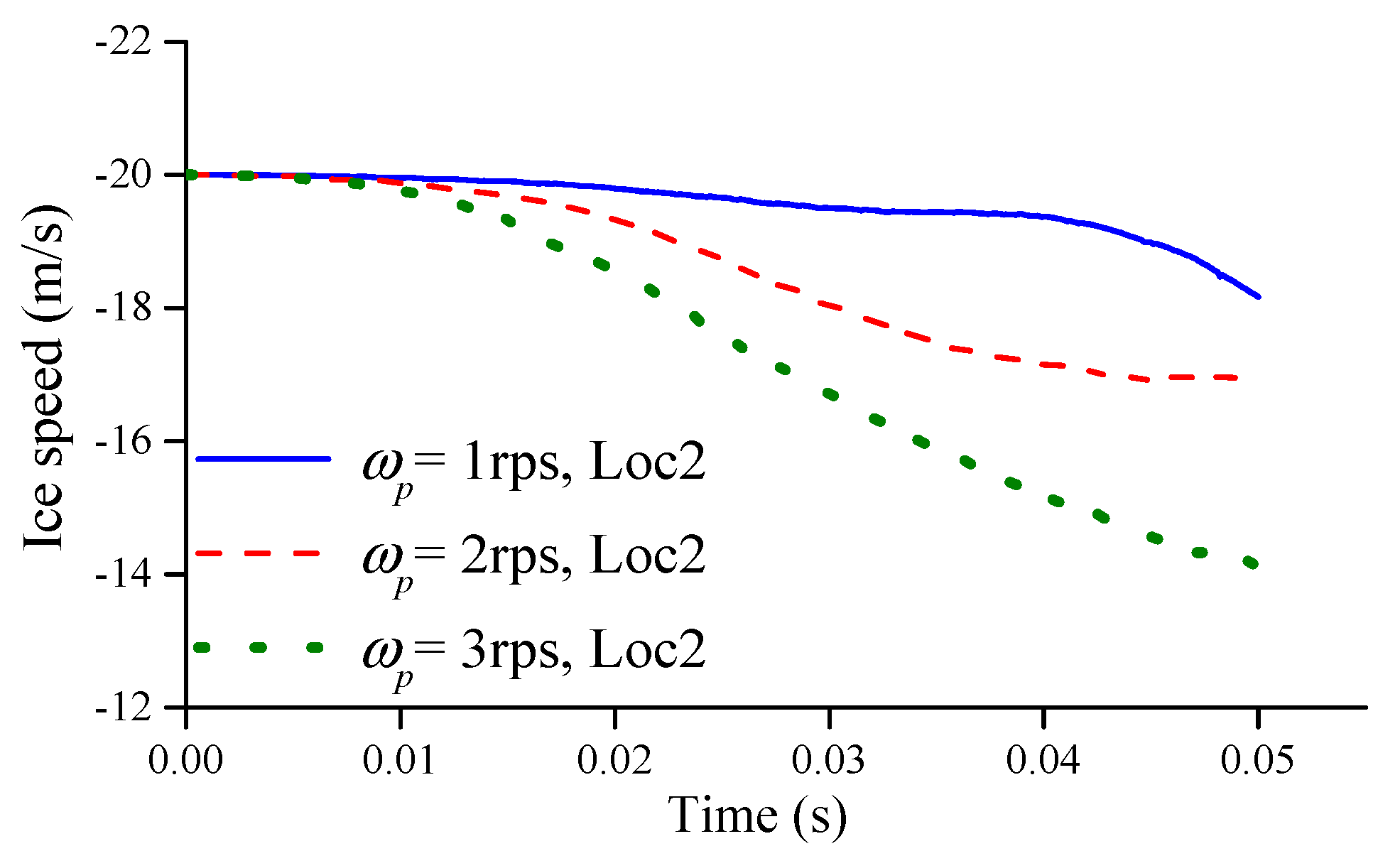
6.1. Effect of Rotational Speed
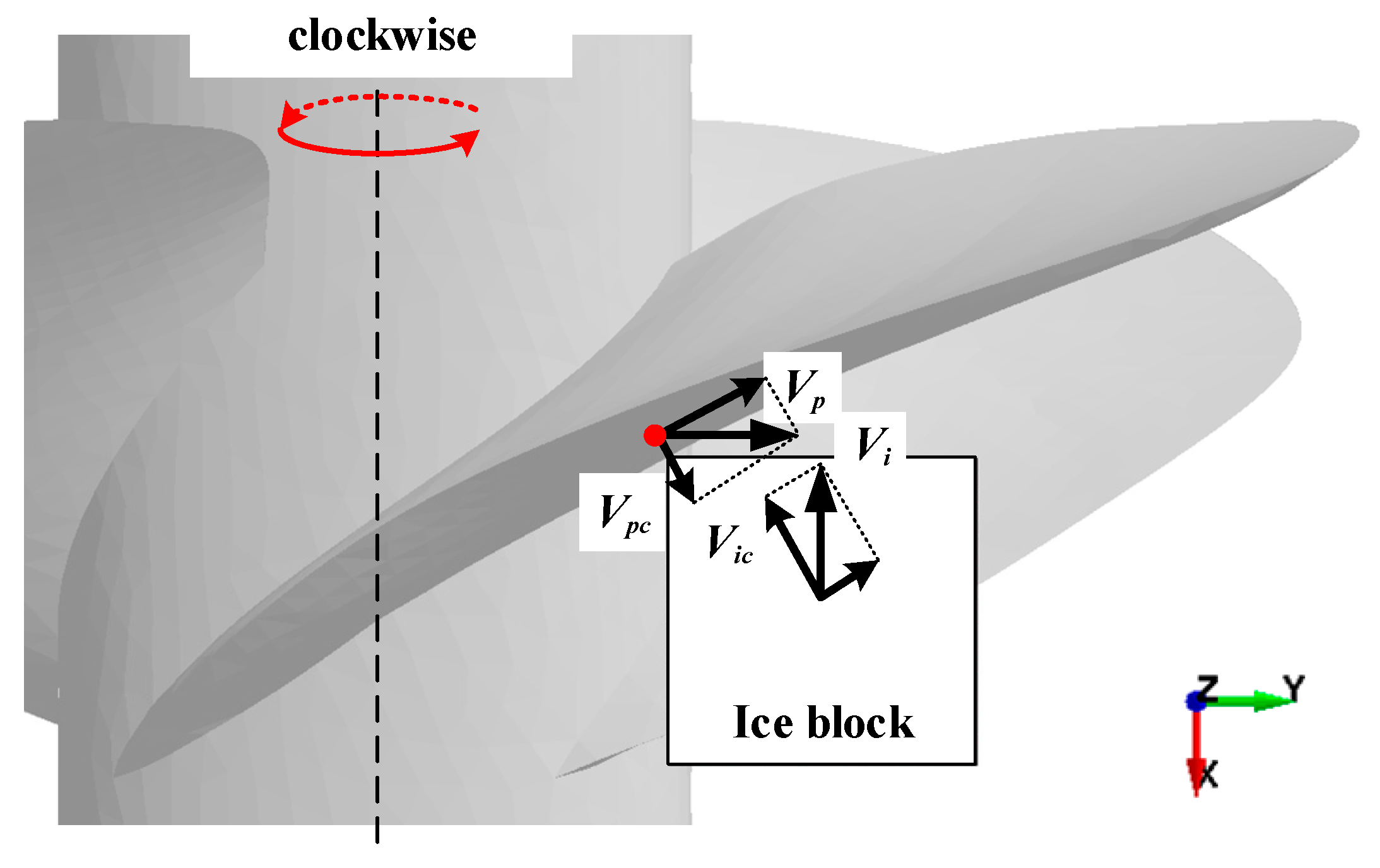
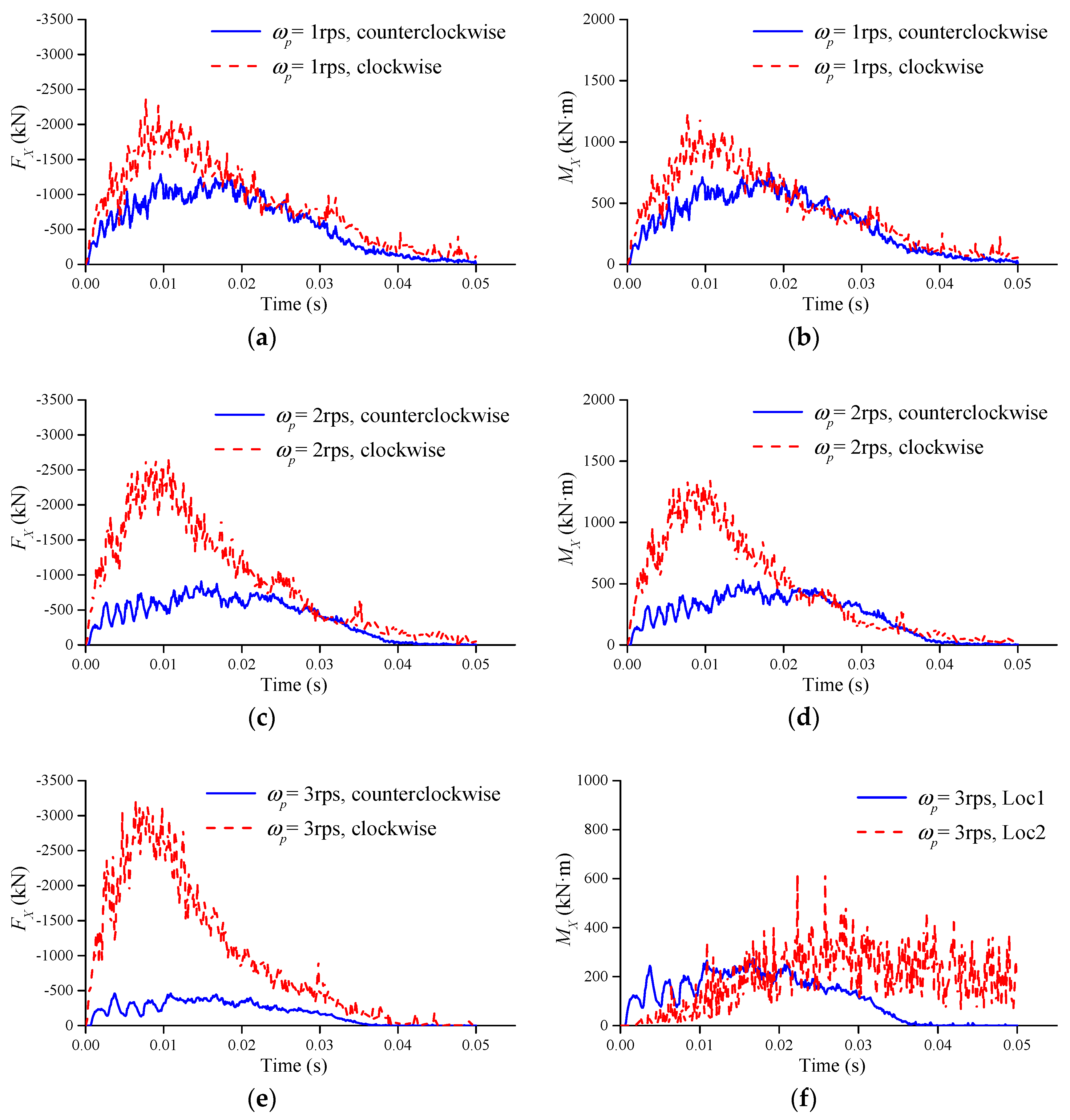
6.2. Effect of Rotational Direction
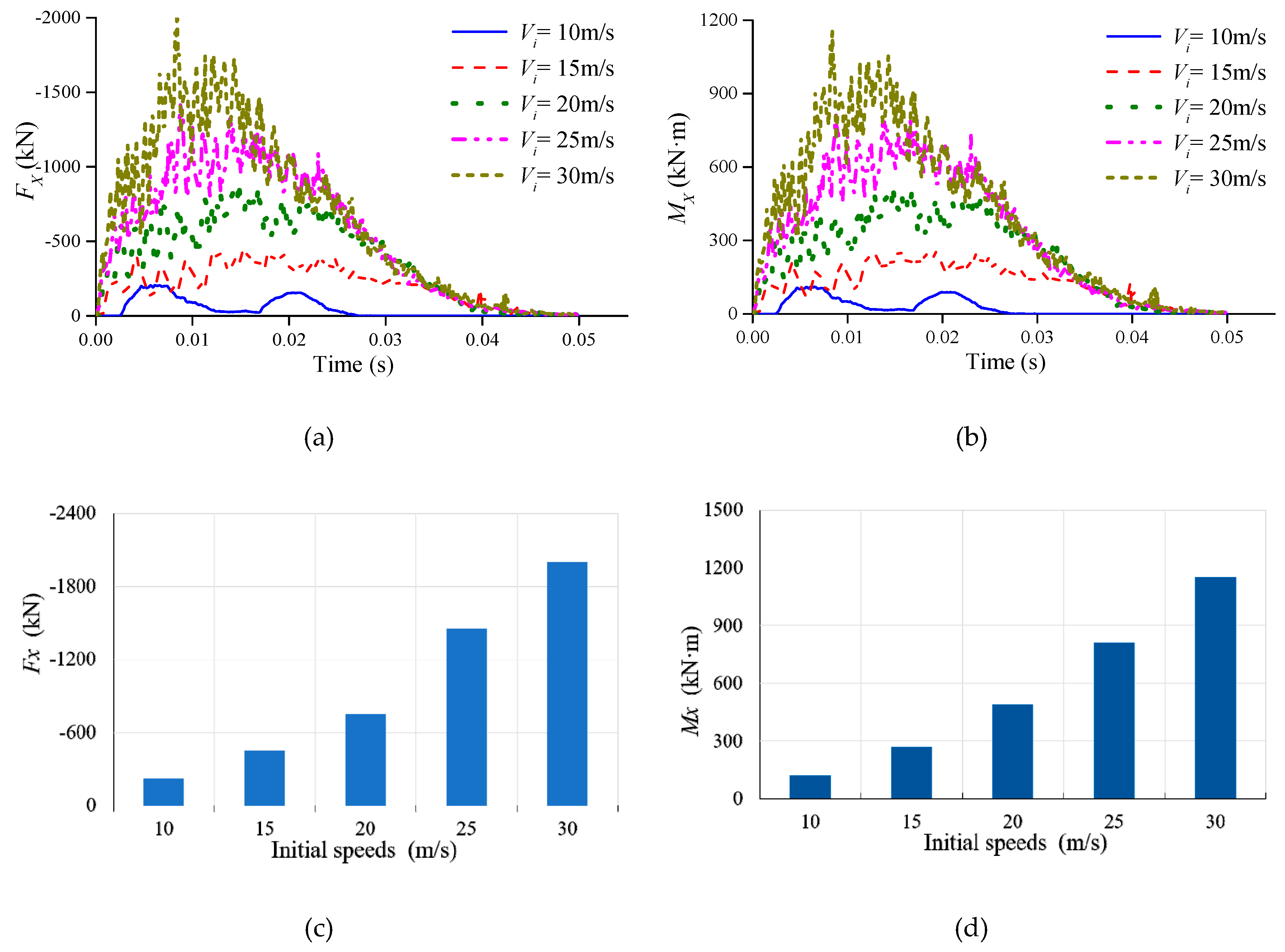
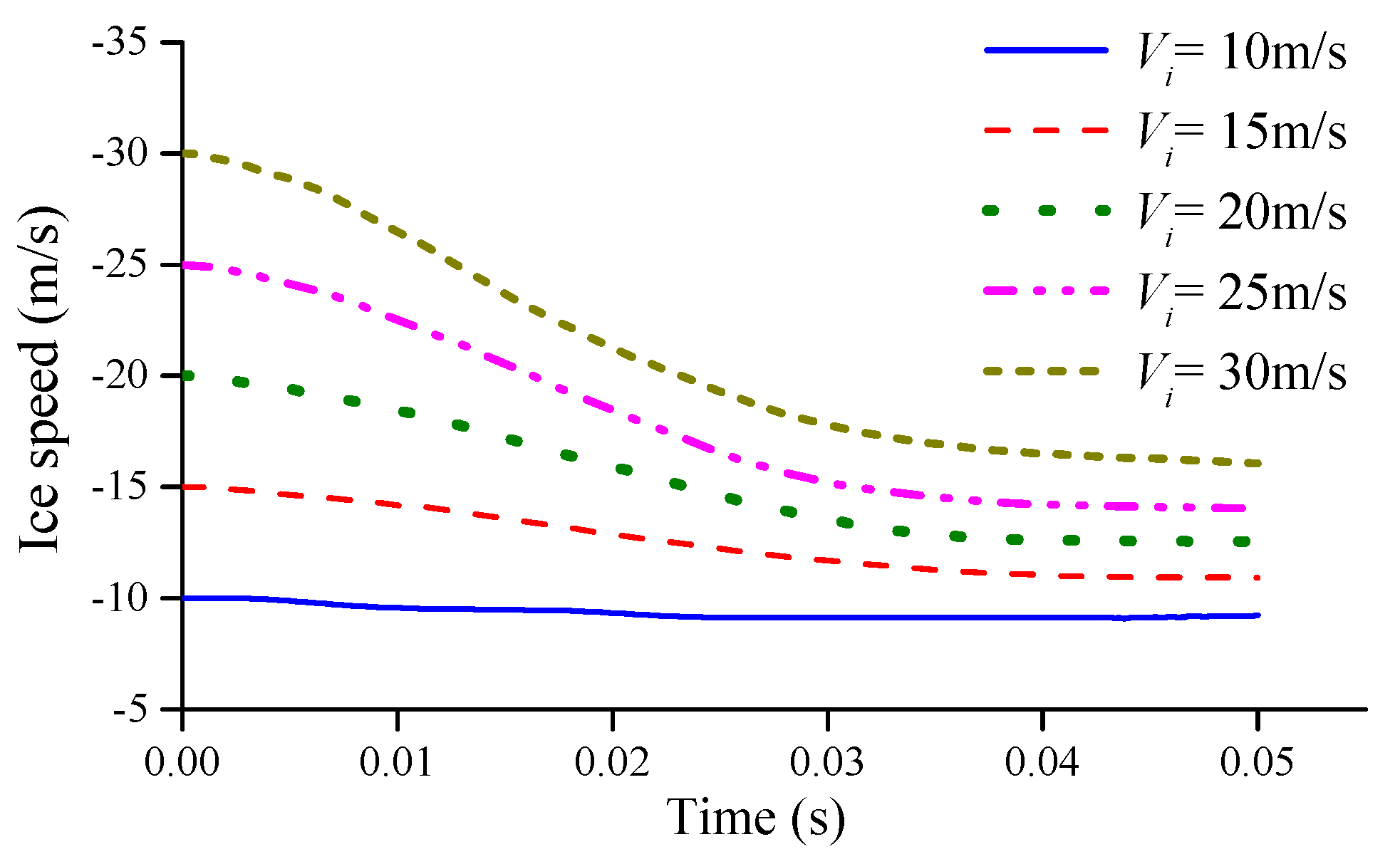
6.3. Effect of Initial Ice Block Speed
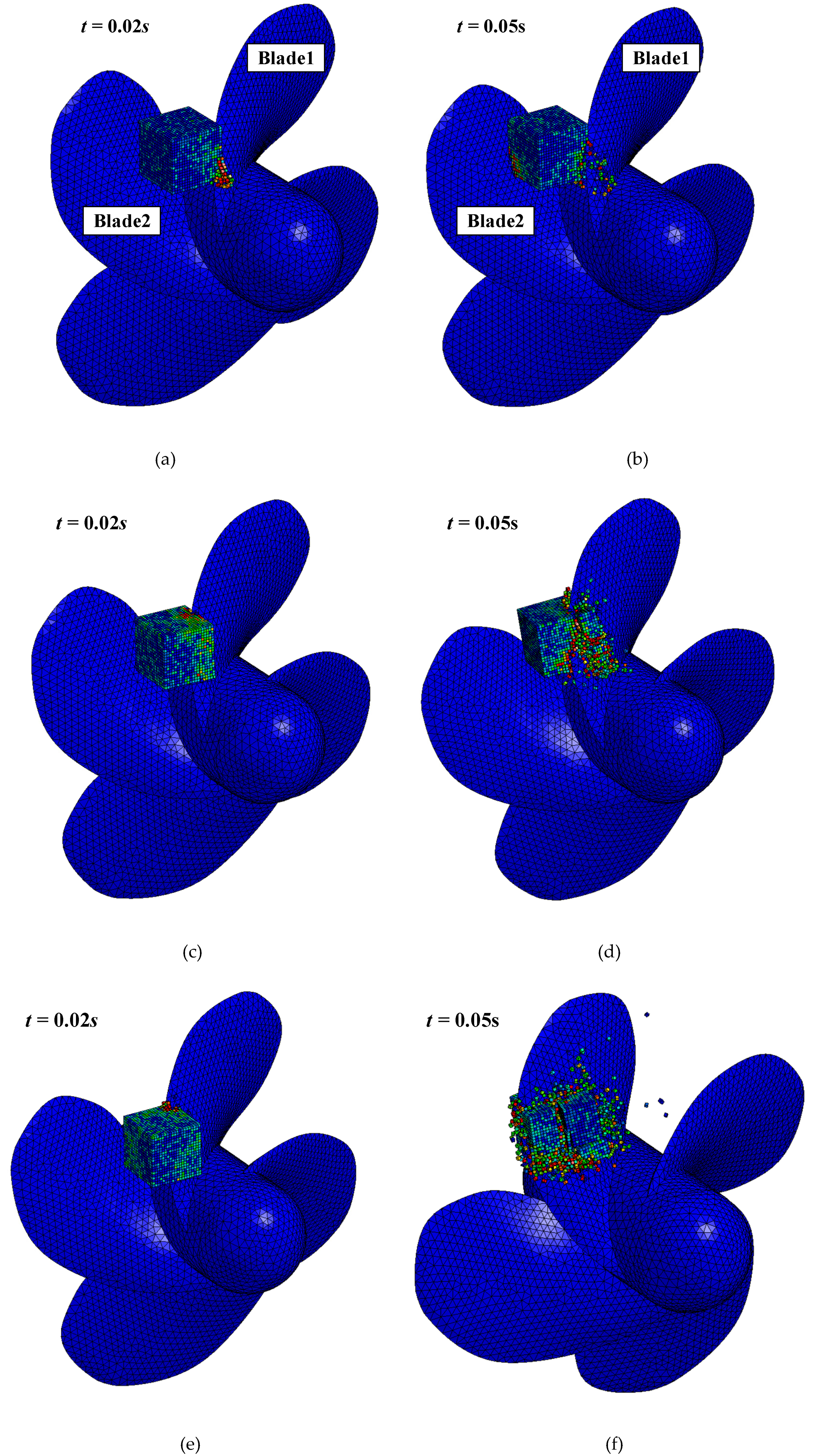
6.4. Effect of Contact Position
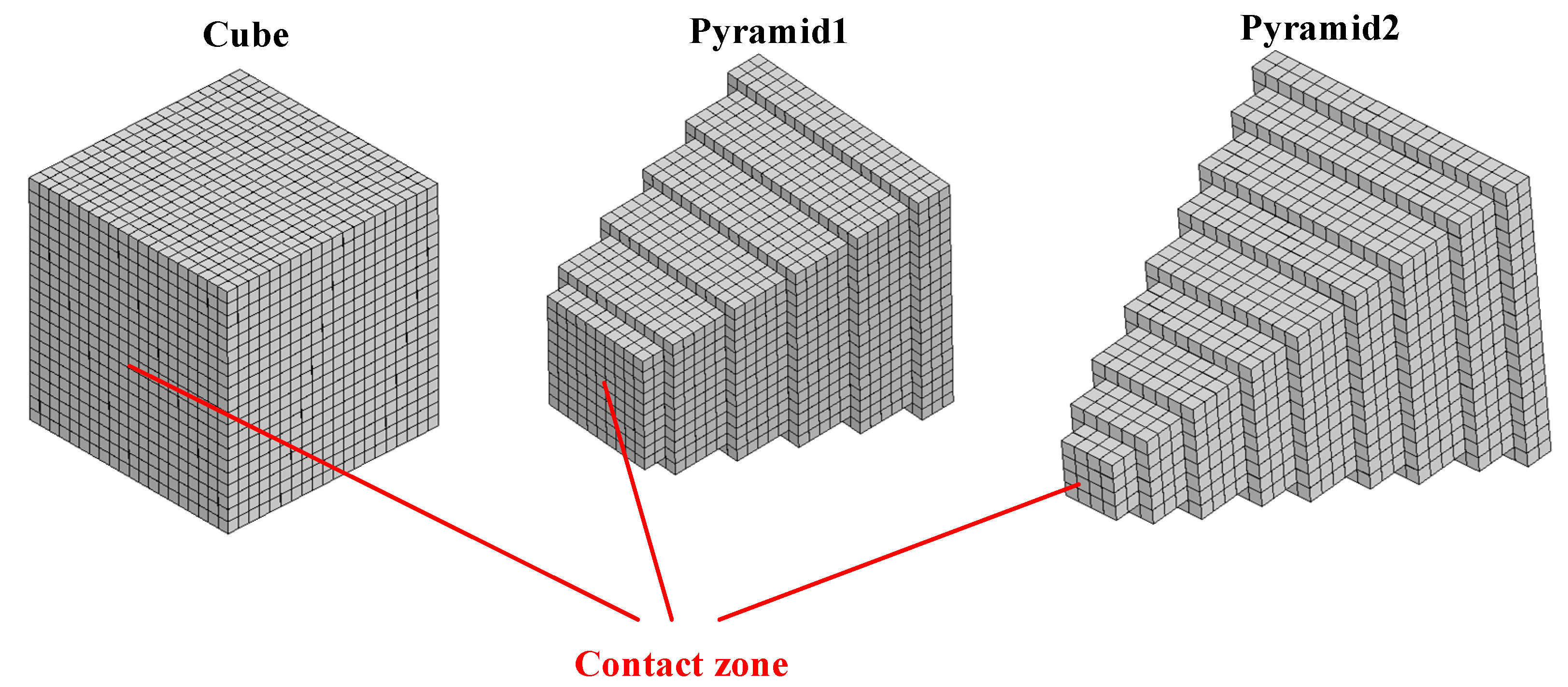
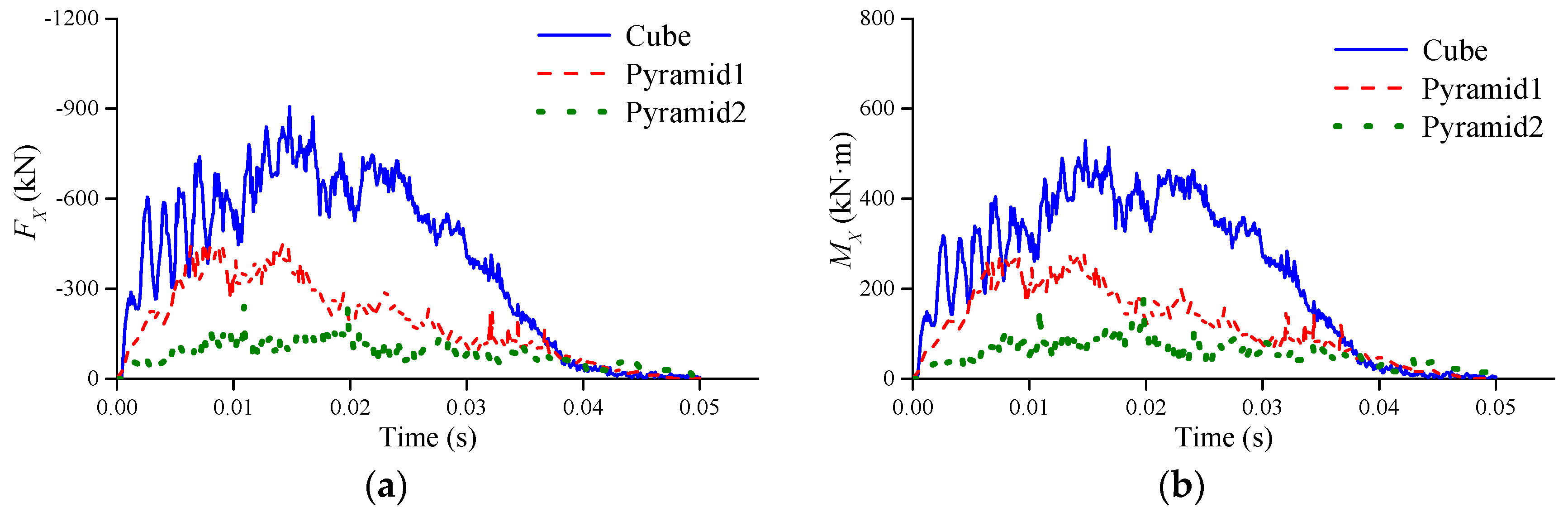
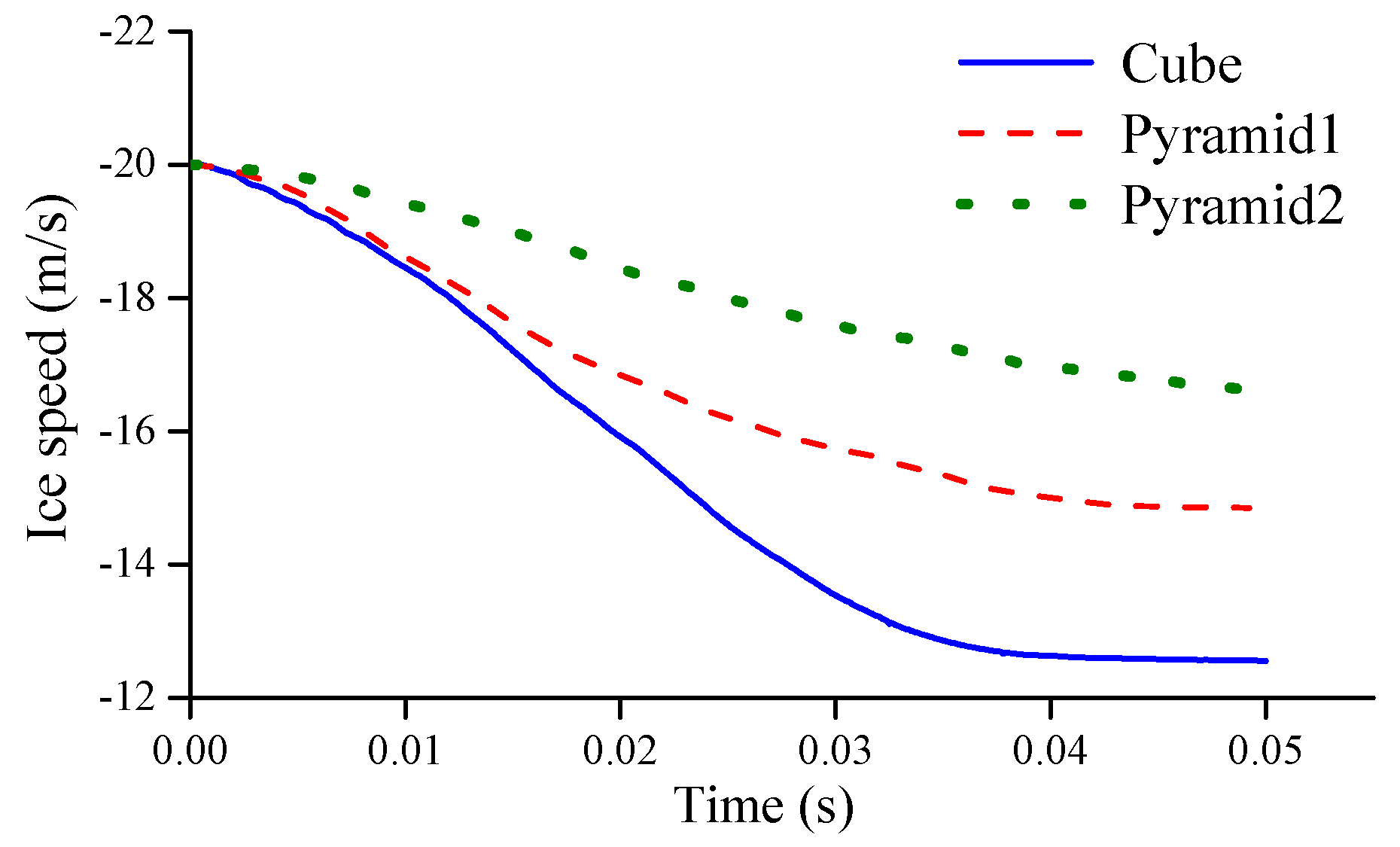
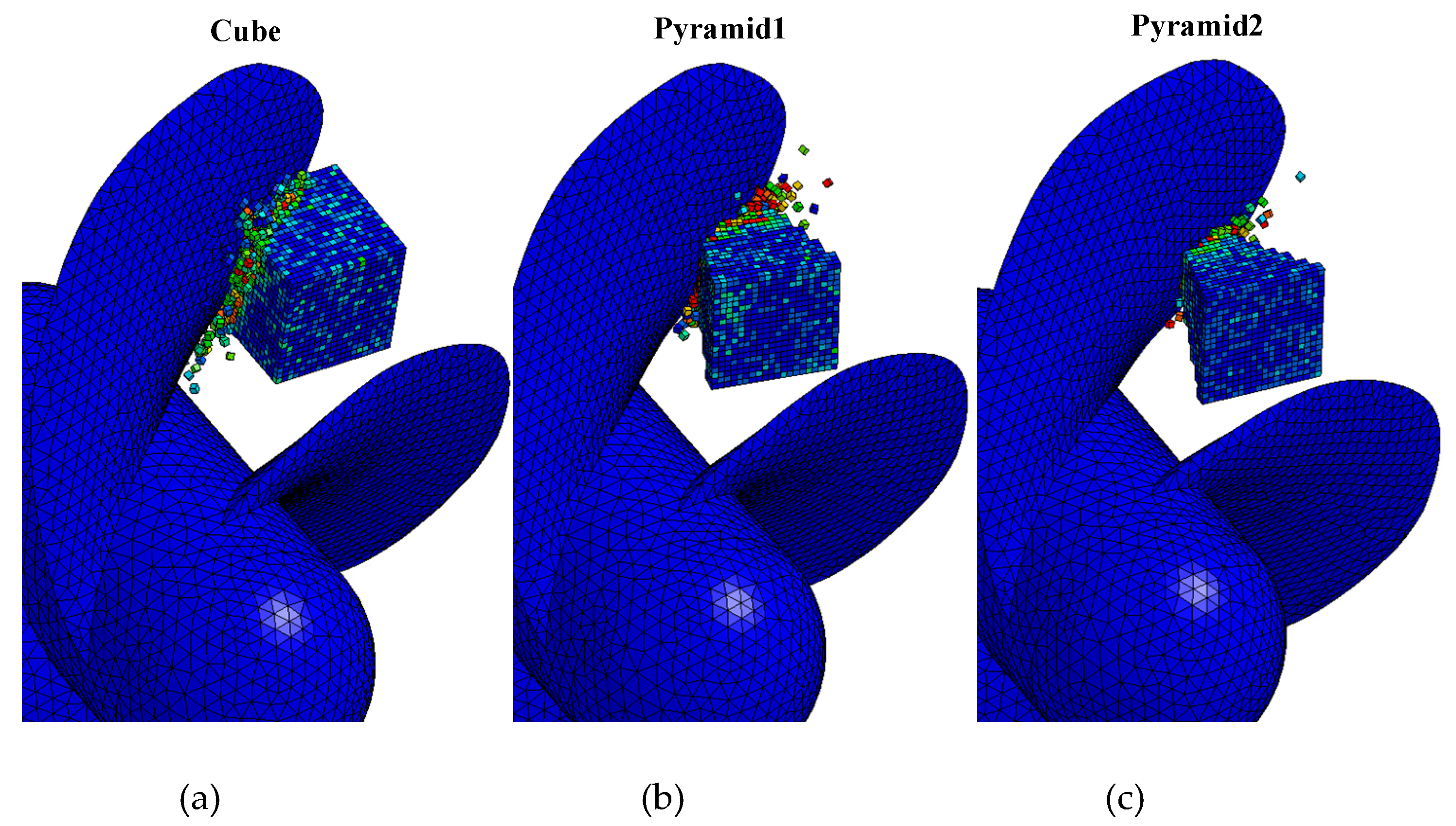
6.5. Effect of Ice-Propeller Contact Area
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Veitch, B. Predictions of Ice Contact Forces on a Marine Screw Propeller during the Propeller-ice Cutting Process. Acta Polytech. Scandi-Navica Mech. Eng. Ser. 1995, 118, 116–119. [Google Scholar]
- Searle, S.; Veitch, B.; Bose, N. Ice-class propeller performance in extreme conditions. Trans. Soc. Nav. Archit. Mar. Eng. 1999, 107, 127–152. [Google Scholar]
- Moores, C.; Veitch, B.; Bose, N.; Jones, S.J.; Carlton, J. Multi-component blade load measurements on a propeller in Ice. Trans. Soc. Nav. Archit. Mar. Eng. 2002, 110, 169–188. [Google Scholar]
- Akinturk, A.; Jones, S.J.; Duffy, D.; Rowell, B. Ice loads on azimuthing podded propulsors. In Proceedings of the 23rd International Conference on Offshore Mechanics and Arctic Engineering, New York, NY, USA, 20–25 June 2004; pp. 903–910. [Google Scholar]
- Wang, J.; Akinturk, A.; Jones, S.J.; Bose, N.; Kim, M.C.; Chun, H.H. Ice loads acting on a model podded propeller blade. J. Offshore Mech. Arct. Eng. 2005, 129, 236–244. [Google Scholar] [CrossRef]
- Wang, J.; Akinturk, A.; Bose, N. Numerical prediction of model podded propeller-ice interaction loads. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4–9 June 2006; pp. 667–674. [Google Scholar]
- Wang, J.; Akinturk, A.; Bose, N. Numerical prediction of propeller performance during propeller-ice interaction. Mar. Technol. 2009, 46, 123–139. [Google Scholar]
- Ye, L.Y.; Wang, C.; Chang, X.; Zhang, H.Y. Propeller-ice contact modeling with peridynamics. Ocean Eng. 2017, 139, 54–64. [Google Scholar] [CrossRef]
- Wang, C.; Xiong, W.P.; Chang, X.; Ye, L.Y.; Li, X. Analysis of variable working conditions for propeller-ice interaction. Ocean Eng. 2018, 156, 277–293. [Google Scholar] [CrossRef]
- Brouwer, J.; Hagesteijn, G.; Bosman, R. Propeller-Ice Impacts Measurements with a Six-Component Blade Load Sensor. In Proceedings of the Third International Symposium on Marine Propulsors smp’13, Tasmania, Australia, 5–8 May 2013. [Google Scholar]
- Wind, J. The dimensioning of high power propeller systems for arctic ice breakers and icebreaking vessels. Int. Shipbuild. Prog. 1984, 31, 131–148. [Google Scholar] [CrossRef]
- Kannari, P. Ice Loads on Propellers in Baltic Conditions; MARC Report D-103; Helsinki University of Technology: Espoo, Finland, 1994. (In Finnish) [Google Scholar]
- Khan, A.G.; Hisette, Q.; Streckwall, H. Numerical investigation of propeller-ice interaction effects. In Proceedings of the 28th International Ocean and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018. [Google Scholar]
- Hu, Z.K.; Gui, H.B.; Xia, P.P.; Wang, J.X. Finite Element Analysis of Ship Propeller Strength under Ice Loads. Ship Eng. 2013, 35, 12–15. [Google Scholar]
- Hillerborg, A.; Modéer, M.; Petersson, P.E. Analysis of crack formation and crack growth in concrete by means of fracture mechanics and finite elements. Cem. Concr. Res. 1976, 6, 773–781. [Google Scholar] [CrossRef]
- Konuk, I.; Yu, S. A cohesive element framework for dynamic ice-structure interaction problems: Part III—Case studies. In Proceedings of the 29th International Conference on Offshore Mechanics and Arctic Engineering, Shanghai, China, 6–11 June 2010; pp. 801–809. [Google Scholar]
- Lu, W.; Lubbad, R.; Løset, S. Simulating ice-sloping structure interactions with the cohesive element method. J. Offshore Mech. Arct. Eng. 2014, 136, 031501. [Google Scholar] [CrossRef]
- Wang, F.; Zou, Z.J.; Zhou, L.; Ren, Y.Z.; Wang, S.Q. A simulation study on the interaction between sloping marine structure and level ice based on cohesive element model. Cold Reg. Sci. Technol. 2018, 149, 1–15. [Google Scholar] [CrossRef]
- Serdar, T.I.; Ankush, K.; Jeom, K.P. A new constitutive equation on ice materials. Ships Offshore Struct. 2017, 12, 610–623. [Google Scholar]
- Hilding, D.; Forsberg, J.; Gürtner, A. Simulation of ice action loads on offshore structures. In Proceedings of the 8th European LS-DYNA Users Conference, Strasbourg, France, 23–24 May 2011; pp. 1–12. [Google Scholar]
- Jonas, W.; Sandro, E.; Henry, P.; Sören, E. The influence of the bow design on structural response due to ice loading. Ships Offshore Struct. 2018, 13 (Suppl. 1), 302–311. [Google Scholar]
- Mi, Y.; Crisfield, M.A.; Davies, G.A.O.; Hellweg, H.B. Progressive delamination using interface elements. J. Compos. Mater. 1998, 32, 1246–1272. [Google Scholar] [CrossRef]
- Emerson, A.; Sinclair, L. Propeller design and model experiments. Trans. North East Coast Inst. Eng. Shipbuild. 1978, 94, 199–234. [Google Scholar]
- Kim, H.; Daley, C.; Colbourne, B. A numerical model for ice crushing on concave surfaces. Ocean Eng. 2015, 106, 289–297. [Google Scholar] [CrossRef]
- Wang, F.; Zou, Z.; Zhou, L.; Wang, Y.; Yu, H.; Zhang, H. Numerical simulation of ice milling loads on propeller blade with cohesive element method. Brodogradnja 2019, 70, 109–128. [Google Scholar] [CrossRef]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Value |
|---|---|
| Density (kg/m3) | 7850 |
| Elastic modulus (GPa) | 200 |
| Poisson ratio | 0.3 |
| Bulk Elements | Cohesive Elements | ||
|---|---|---|---|
| Items | Value | Items | Value |
| Density (kg/m3) | 910 | Density (kg/m3) | 910 |
| Elastic modulus (GPa) | 5 | Elastic modulus (GPa) | 5 |
| Poisson ratio | 0.3 | T0/Tensile strength (MPa) | 1.0 |
| Compressive strength (MPa) | 2.0 | S0/Shear strength (MPa) | 1.0 |
| Crushed strain εc | 0.35 | GIC/Fracture energy in mode I (J/m2) | 30 |
| Failure strain εf | 0.5 | GIIC/Fracture energy in mode II (J/m2) | 30 |
| Peak | Force | Moment | ||||
|---|---|---|---|---|---|---|
| Simulation (N) | Experiment (N) | Error | Simulation (Nm) | Experiment (Nm) | Error | |
| Peak 1 | 151.6 | 155.9 | −2.8% | 17.95 | 19.02 | −5.6% |
| Peak 2 | 189.3 | 191.5 | −1.2% | 19.92 | 12.61 | 57.9% |
| Peak 3 | 179.8 | 180.5 | −0.4% | 19.52 | 17.07 | 14.4% |
| Peak 4 | 156.8 | 178.8 | −12.3% | 16.24 | 17.84 | −8.9% |
| Peak 5 | 195.4 | 162.7 | 20.0% | 19.51 | 18.75 | 4.1% |
| Mean | 174.6 | 173.9 | 0.4% | 18.62 | 17.06 | 9.1% |
| Mesh | Fx (kN) | Mx (kN·m) | ||||
|---|---|---|---|---|---|---|
| Mean | StDev | Peak | Mean | StDev | Peak | |
| Coarse | −388 (0.8%) | 264 (2.7%) | −852 (3.3%) | 234 (1.7%) | 154 (4.3%) | 486 (4.3%) |
| Medium | −390 (0.3%) | 272 (1.5%) | −907 (3.0%) | 237 (0.4%) | 163 (1.2%) | 529 (4.1%) |
| Dense | −391 (-) | 268 (-) | −881 (-) | 238 (-) | 161 (-) | 508(-) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, L.; Wang, F.; Diao, F.; Ding, S.; Yu, H.; Zhou, Y. Simulation of Ice-Propeller Collision with Cohesive Element Method. J. Mar. Sci. Eng. 2019, 7, 349. https://doi.org/10.3390/jmse7100349
Zhou L, Wang F, Diao F, Ding S, Yu H, Zhou Y. Simulation of Ice-Propeller Collision with Cohesive Element Method. Journal of Marine Science and Engineering. 2019; 7(10):349. https://doi.org/10.3390/jmse7100349
Chicago/Turabian StyleZhou, Li, Feng Wang, Feng Diao, Shifeng Ding, Hao Yu, and Yang Zhou. 2019. "Simulation of Ice-Propeller Collision with Cohesive Element Method" Journal of Marine Science and Engineering 7, no. 10: 349. https://doi.org/10.3390/jmse7100349
APA StyleZhou, L., Wang, F., Diao, F., Ding, S., Yu, H., & Zhou, Y. (2019). Simulation of Ice-Propeller Collision with Cohesive Element Method. Journal of Marine Science and Engineering, 7(10), 349. https://doi.org/10.3390/jmse7100349