Numerical Investigation on the Scale Effect of a Stepped Planing Hull


Abstract
:1. Introduction
2. Validation and Verification of the Numerical Method
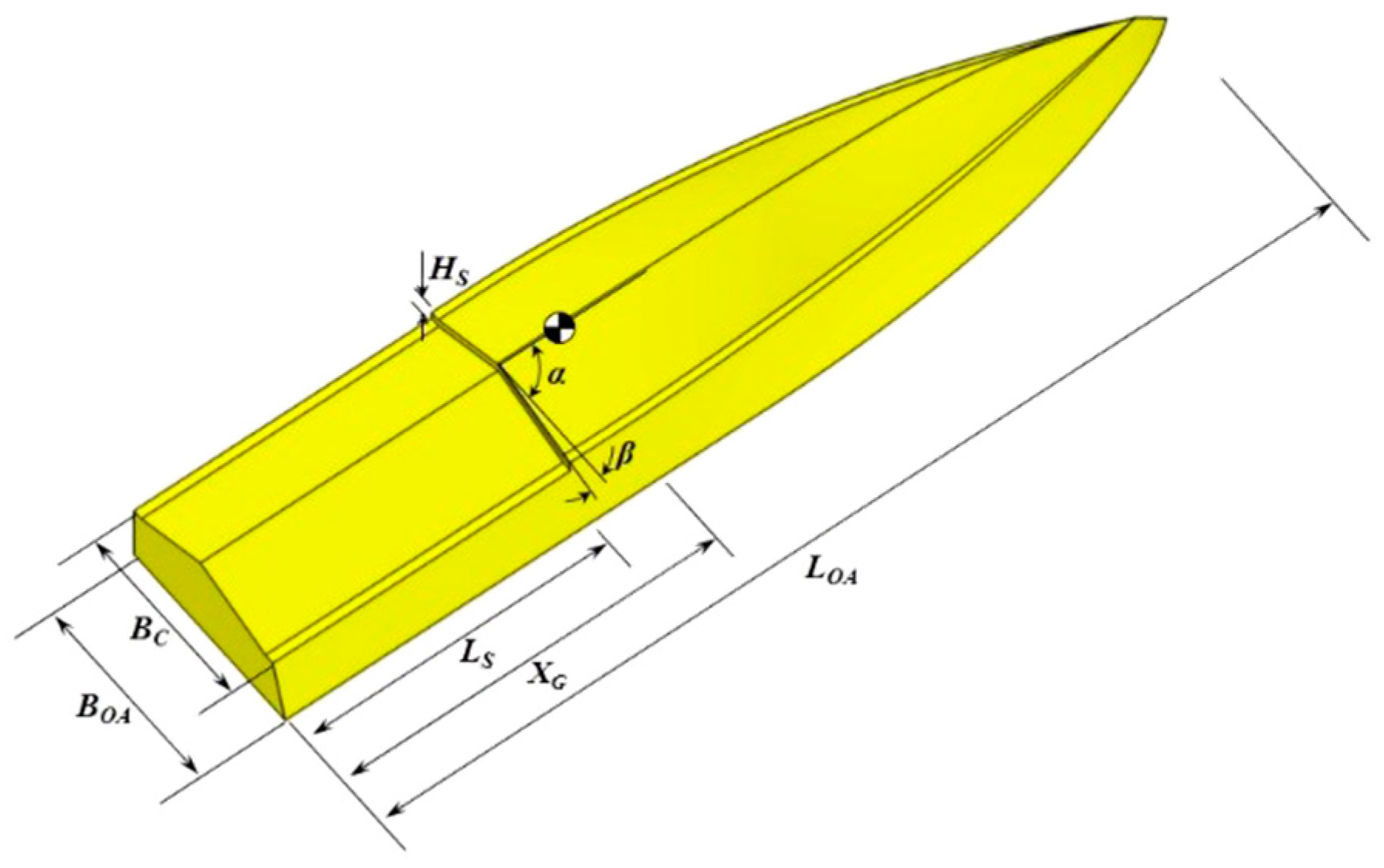
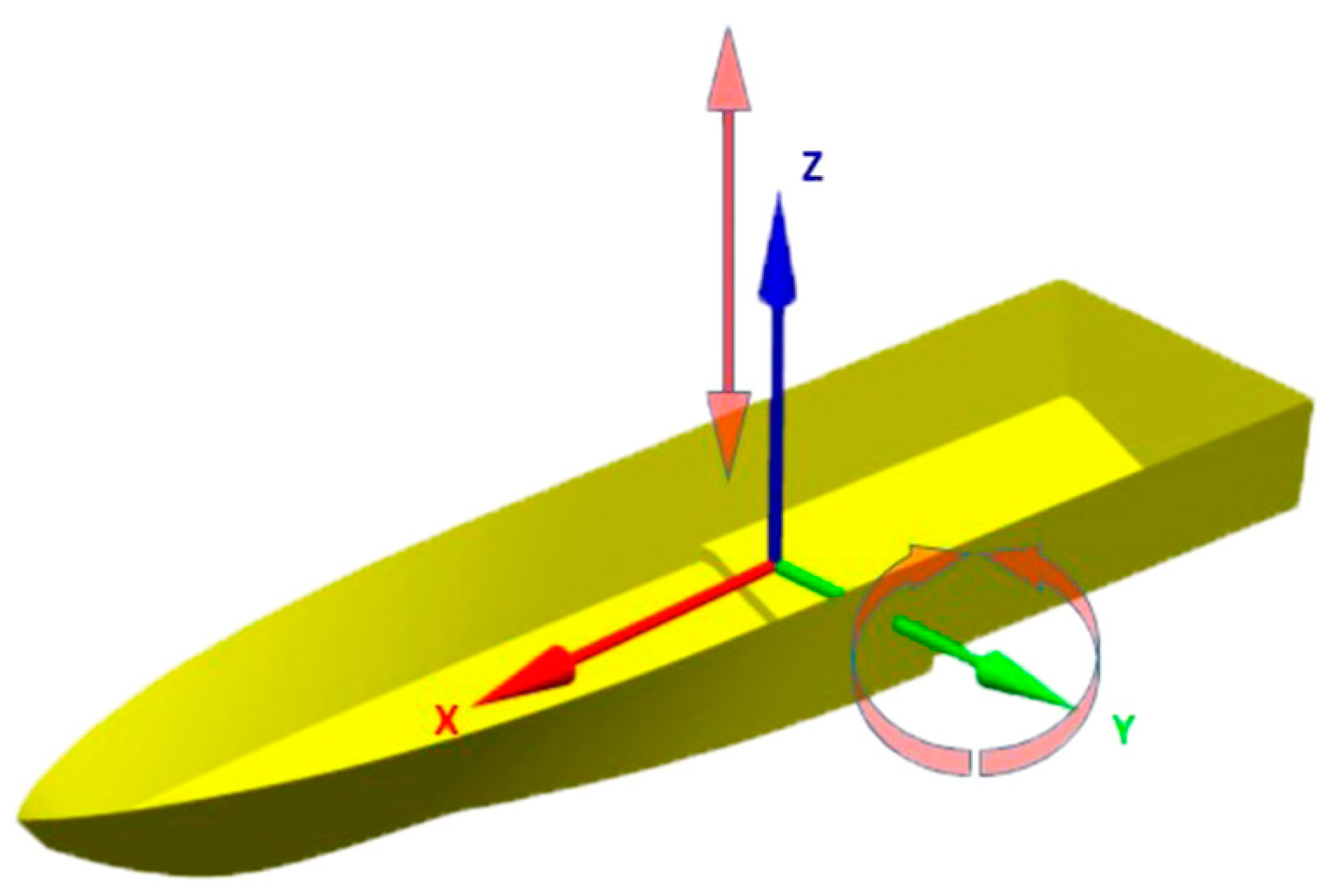
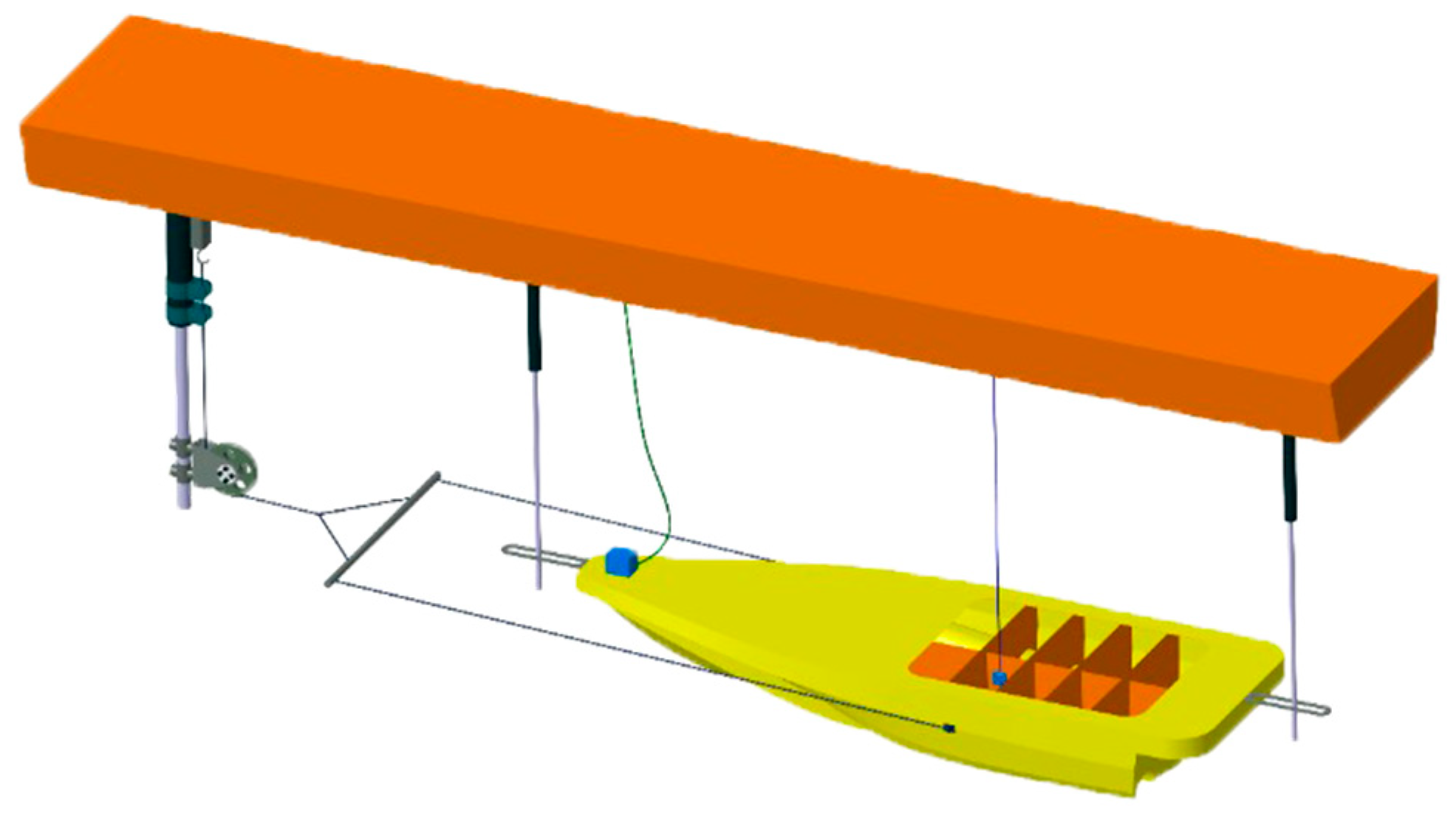
2.1. Model Introduction
2.2. Mathematical and Numerical Method
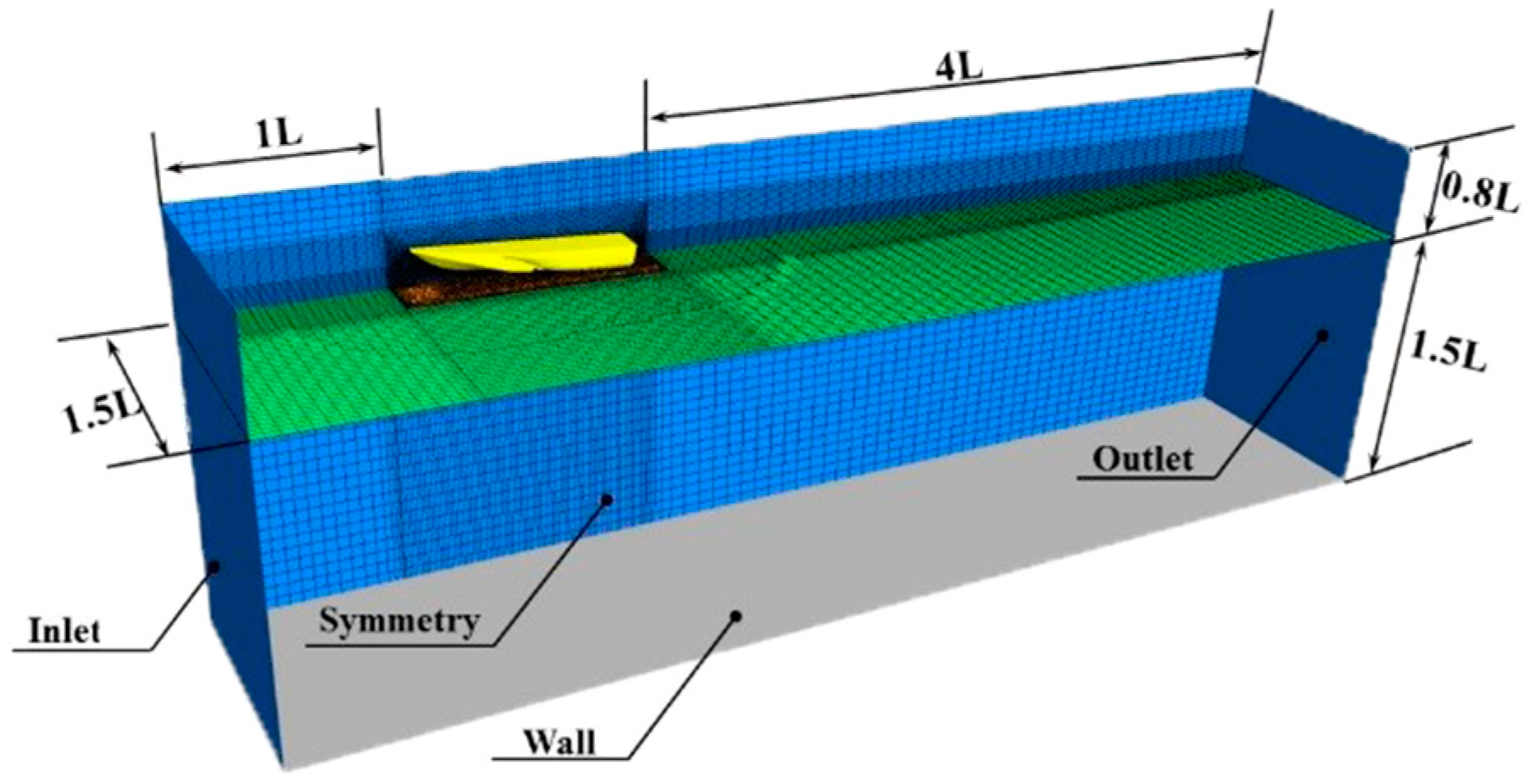
2.3. Domain Codition and Boundary Conditions
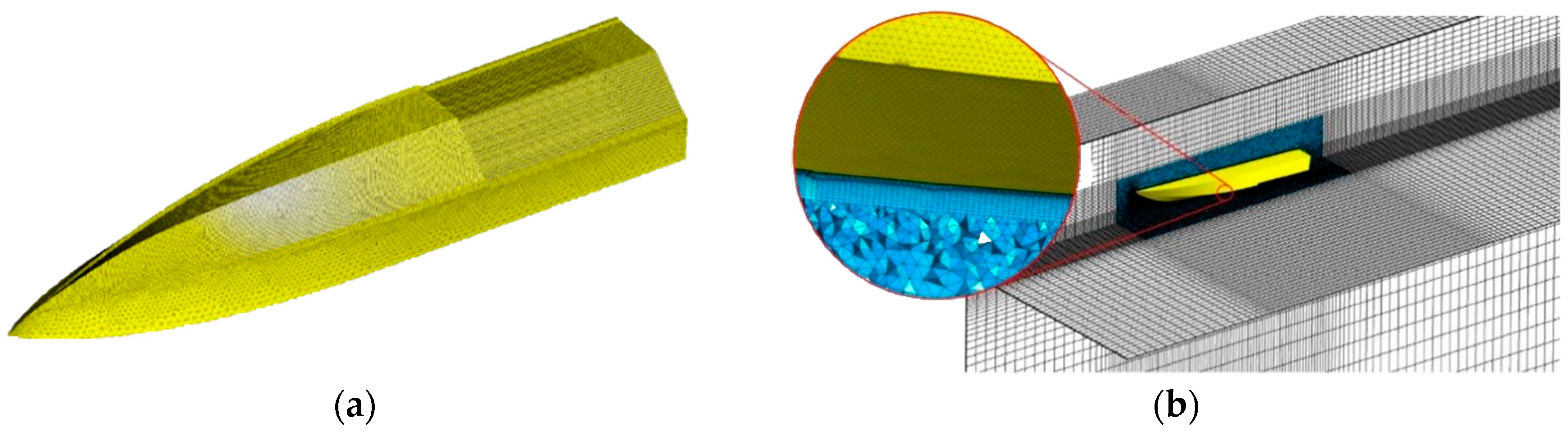
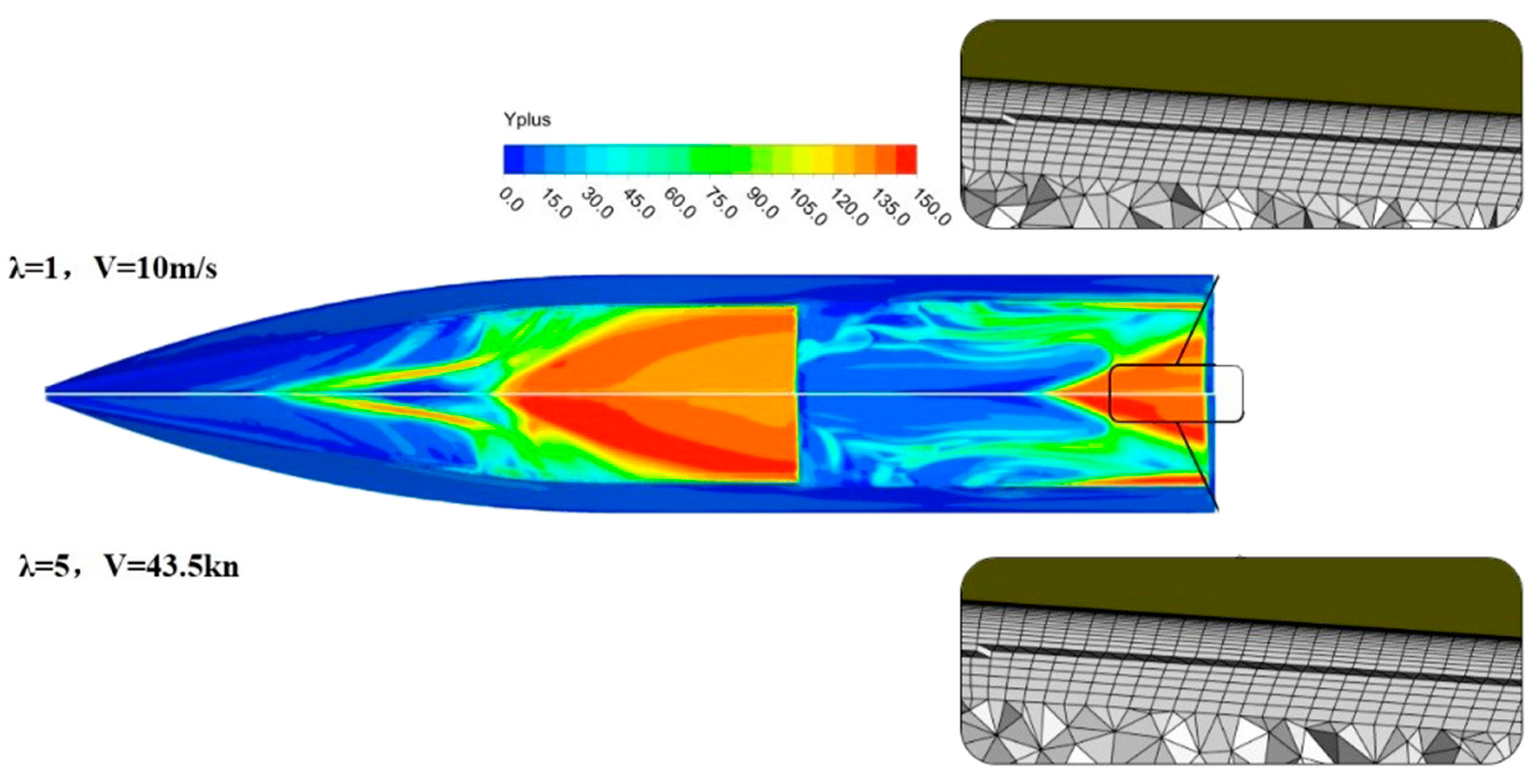
2.4. Mesh Generation
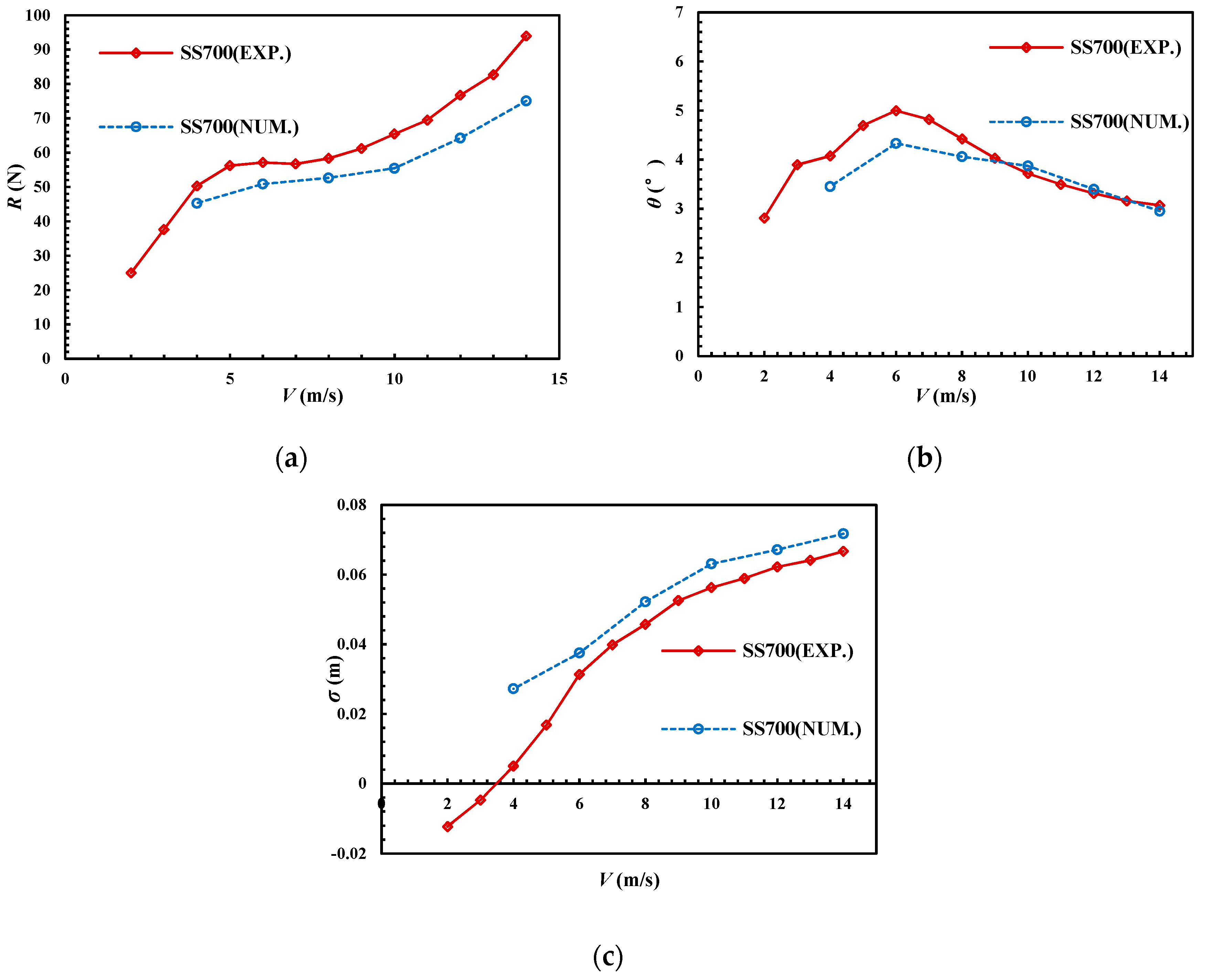
2.5. Validation and Verification
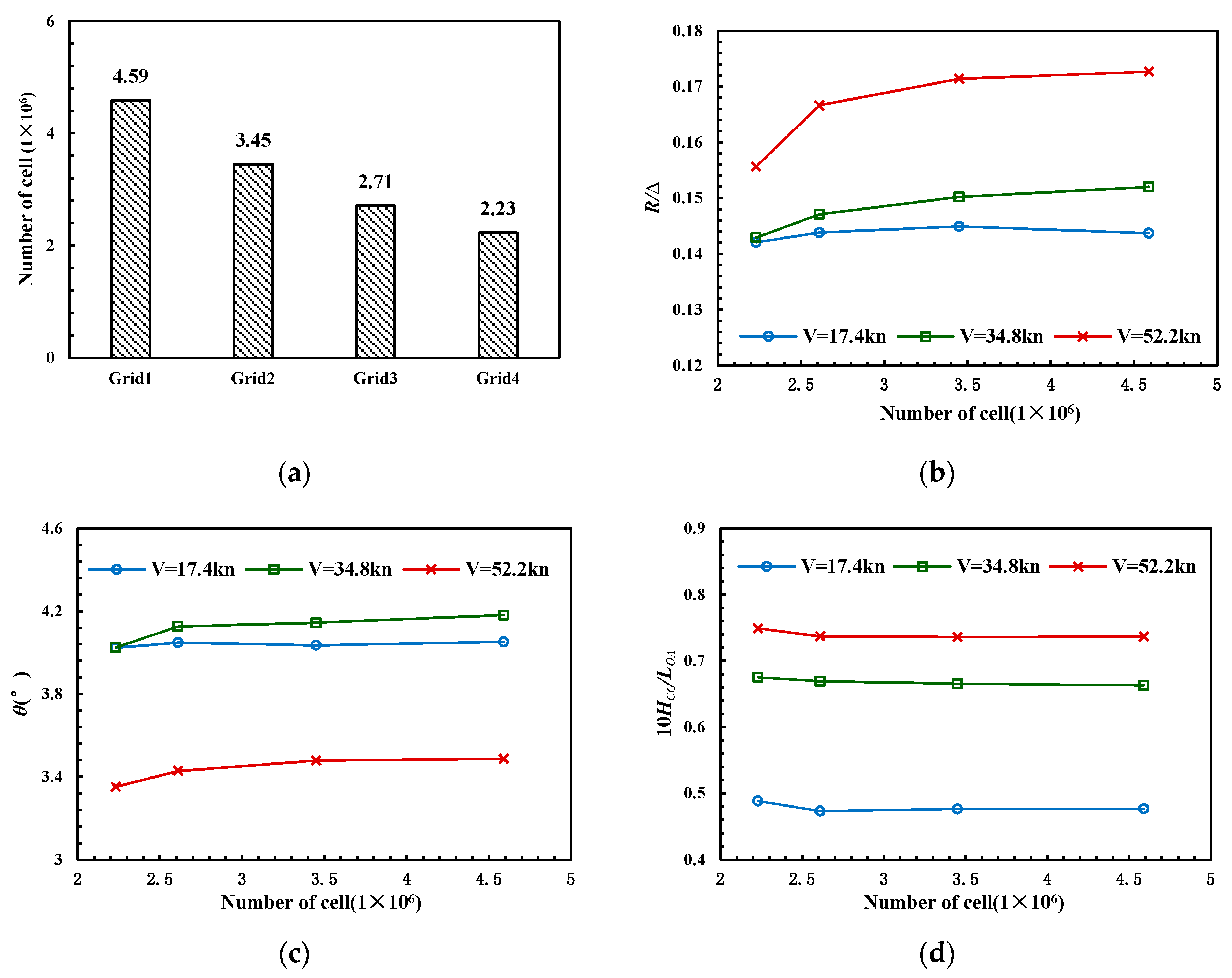
2.6. Generation Convergence of the Full-Scaled Model
3. Scale Effect Analysis
4. Conclusion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lee, E.; Pavkov, M.; Mccueweil, L. The Systematic Variation of Step Configuration and Displacement for a Double-step Planing Craft. J. Ship Prod. Des. 2014, 30, 89–97. [Google Scholar] [CrossRef]
- Taunton, D.J.; Hudson, D.A.; Shenoi, R.A. Characteristics of a series of high speed hard chine planing hulls-Part 1: Performance in calm water. Int. J. Small Craft Technol. 2010, 152, 55–75. [Google Scholar] [CrossRef]
- Taunton, D.J.; Hudson, D.A.; Shenoi, R.A. Characteristics of a series of high speed hard chine planing hulls-Part II: Performance in waves. Int. J. Small Craft Technol. 2011, 152, 55–75. [Google Scholar] [CrossRef]
- Jiang, Y.; Sun, H.B.; Zou, J.; Hu, A.K.; Yang, J.L. Analysis of tunnel hydrodynamic characteristics for planing trimaran by model tests and numerical simulations. Ocean Eng. 2016, 113, 101–110. [Google Scholar] [CrossRef]
- Savander, B.R.; Scorpio, S.M.; Taylor, R.K. Steady Hydrodynamic Analysis of Planing Surfaces. J. Ship Res. 2002, 46, 248–279. [Google Scholar] [CrossRef]
- Ghassemi, H.; Ghiasi, M. A combined method for the hydrodynamic characteristics of planing crafts. Ocean Eng. 2015, 35, 310–322. [Google Scholar] [CrossRef]
- Pemberton, R.; Turnock, S.; Watson, S. Free surface CFD simulations of the flow around a planing plate. In Proceedings of the 6th International Conference on Fast Sea Transportation (FAST), Southampton, UK, 1 January 2001. [Google Scholar]
- Subramanian, V.A.; Subramanyam, P.V.V. Effect of tunnel on the resistance of high-speed planing craft. J. Nav. Archit. Mar. Eng. 2009, 2, 15–26. [Google Scholar] [CrossRef]
- Subramanian, V.A.; Subramanyam, P.V.V.; Ali, N.S. Pressure and drag influences due to tunnels in high-speed planing craft. Int. Shipbuild. Prog. 2007, 1, 25–44. [Google Scholar]
- Azcueta, R. RANSE Simulations for Sailing Yachts Including Dynamic Sinkage & Trim and Unsteady Motions in Waves. In Proceedings of the High Performance Yacht Design Conference, Auckland, New Zealand, 1 January 2002. [Google Scholar]
- Shengcheng, J.I.; Ouahsine, A.; Smaoui, H.; Sergent, P. 3D Modeling of sediment movement by ships-generated wakes in confined shipping channel. Int. J. Sediment Res. 2014, 29, 49–58. [Google Scholar] [CrossRef]
- Linde, F.; Ouahsine, A.; Huybrechts, N.; Sergent, P. Three-dimensional numerical simulation of ship resistance in restricted waterways: Effect of ship sinkage and channel restriction. J. Waterw. Port. Coast. Ocean Eng. 2017, 143, 06016003. [Google Scholar] [CrossRef]
- Yousefi, R.; Shifaghat, R.; Shakeri, M. Hydrodynamic analysis techniques for high-speed planing hulls. Appl. Ocean Res. 2013, 42, 105–113. [Google Scholar] [CrossRef]
- Azcueta, R.; Rousselon, N. CFD Applied to Super and Mega Yacht Design. In Proceedings of the Design, Construction and Operation of Super and Mega Yachts Conference, Genova, Italy, 10 April 2009. [Google Scholar]
- Lotfi, P.; Ashrafizaadeh, M.; Esfahan, R.K. Numerical investigation of a stepped planing hull in calm water. Ocean Eng. 2015, 94, 103–110. [Google Scholar] [CrossRef]
- Du, P.; Ouahsine, A.; Sergent, P. Influence of the draft to ship dynamics in the virtual tank based on openfoam. In Proceedings of the 7th International Conference on Computational Methods in Marine Engineering (MARINE 2017), Nantes, France, 15 May 2017. [Google Scholar]
- Hochkirch, K.; Mallol, B. On the importance of full-scale CFD simulations for ships. In Proceedings of the 12th International Conference on Computer Applications and Information Technology in the Maritime Industries (COMPIT 2013), Cortona, Italy, 9 May 2013. [Google Scholar]
- Starke, B. The prediction of scale effects on ship wave systems using a steady iterative RANS method. In Proceedings of the 7th Numerical Towing Tank Symposium, Hamburg, Germany, 3–5 October 2004. [Google Scholar]
- Dubrovsky, V.A.; Matveev, K.I. Small waterplane area ship models: Re-analysis of test results based on scale effect and form drag. Ocean Eng. 2006, 33, 950–963. [Google Scholar] [CrossRef]
- Lei, D.; Hanbing, S.; Yi, J.; Ping, L. Numerical research on the resistance reduction of air intake. Water 2019, 11, 280. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value |
|---|---|---|
| Length overall, m | 10 | |
| Beam, m | 2.09 | |
| Depth, m | 1.35 | |
| Height of the gravity, m | 0.75 | |
| Trim angle in calm water, degree | 1.05 | |
| Draft in middle of the boat, m | 0.505 | |
| Draft in stern, m | 0.597 | |
| Width of the chine, m | 1.5 | |
| Longitudinal length of the step, m | 3.11 | |
| Height of the step, m | 0.1 | |
| The angle between step and longitudinal section in center plane, degree | 90 | |
| Dead risen angle, degree | 20 | |
| Displacement, T | 3.75 | |
| Longitudinal center of gravity, m | 3.5 |
| V m/s | R(N) | Trim (deg) | Sinkage(m) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Computation | Experiment | Error (%) | Computation | Experiment | Error (%) | Computation | Experiment | Error (%) | |
| 4 | 45.299 | 50.306 | 9.95 | 3.455 | 4.075 | 15.23 | 0.027 | 0.005 | 445.40 |
| 6 | 50.89 | 57.143 | 10.94 | 4.332 | 4.999 | 13.35 | 0.038 | 0.031 | 19.66 |
| 8 | 52.66 | 58.340 | 9.74 | 4.062 | 4.422 | 8.15 | 0.052 | 0.046 | 14.16 |
| 10 | 55.459 | 65.452 | 15.27 | 3.873 | 3.718 | 4.18 | 0.063 | 0.056 | 12.10 |
| 12 | 64.247 | 76.724 | 16.26 | 3.398 | 3.312 | 2.60 | 0.067 | 0.062 | 7.94 |
| 14 | 75.076 | 93.970 | 20.11 | 2.953 | 3.07 | 3.80 | 0.072 | 0.067 | 7.53 |
| % | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 17.4kn | 34.8kn | 52.2kn | 17.4kn | 34.8kn | 52.2kn | 17.4kn | 34.8kn | 52.2kn | |
| 7.0572 | 2.9371 | 1.2342 | 2.2887 | 2.4969 | 0.5843 | 1.5902 | 0.8888 | 3.1325 | |
| 2.8512 | 2.1234 | 0.7768 | 1.4600 | 0.4514 | 0.3205 | 0.1282 | 0.5493 | 0.6850 | |
| 0.7407 | 1.1961 | 0.8402 | 0.2532 | 0.4147 | 0.4060 | 0.0509 | 0.3539 | 0.0409 | |
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) |
|---|---|---|---|---|---|---|---|
| As Eq. (13) | As Eq. (13) | ||||||
| 4 | 0.832 | 0.584 | 6.49 × 106 | 3.24 × 10−3 | 8.94 | 7.25 × 107 | 2.58 × 10−3 |
| 6 | 0.610 | 0.426 | 7.12 × 106 | 3.19 × 10−3 | 13.42 | 7.96 × 107 | 2.55 × 10−3 |
| 8 | 0.550 | 0.317 | 7.94× 106 | 3.12 × 10−3 | 17.89 | 8.87 × 107 | 2.52 × 10−3 |
| 10 | 0.501 | 0.242 | 8.51 × 106 | 3.09 × 10−3 | 22.36 | 9.51 × 107 | 2.50 × 10−3 |
| 12 | 0.482 | 0.183 | 9.14 × 106 | 3.05 × 10−3 | 26.83 | 1.02 × 108 | 2.48 × 10−3 |
| (9) | (10) | (11) | (12) | (13) | (14) | (15) | (16) | (17) |
|---|---|---|---|---|---|---|---|---|
| As Eq. (4) | As Eq. (10) | (12) − (5) | (13) + (8) | As Eq. (10) | ||||
| 0.509 | 13.16 | 44.91 | 1.11 × 10−2 | 7.82 × 10−3 | 1.04 × 10−3 | 12.72 | 5.28 | 5.32 |
| 0.302 | 17.29 | 48.08 | 8.86 × 10−3 | 5.67 × 10−3 | 8.22× 10−3 | 7.56 | 5.58 | 5.44 |
| 0.250 | 24.98 | 47.78 | 5.98 × 10−3 | 2.85 × 10−3 | 5.37 × 10−3 | 6.26 | 5.37 | 5.29 |
| 0.192 | 29.49 | 48.92 | 5.12 × 10−3 | 2.03 × 10−3 | 4.53 × 10−3 | 4.79 | 5.41 | 5.24 |
| 0.186 | 40.69 | 55.38 | 4.15 × 10−3 | 1.10 × 10−3 | 3.58 × 10−3 | 4.65 | 5.97 | 5.76 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, L.; Lin, Z.; Jiang, Y.; Li, P.; Dong, Y. Numerical Investigation on the Scale Effect of a Stepped Planing Hull. J. Mar. Sci. Eng. 2019, 7, 392. https://doi.org/10.3390/jmse7110392
Du L, Lin Z, Jiang Y, Li P, Dong Y. Numerical Investigation on the Scale Effect of a Stepped Planing Hull. Journal of Marine Science and Engineering. 2019; 7(11):392. https://doi.org/10.3390/jmse7110392
Chicago/Turabian StyleDu, Lei, Zhuang Lin, Yi Jiang, Ping Li, and Yue Dong. 2019. "Numerical Investigation on the Scale Effect of a Stepped Planing Hull" Journal of Marine Science and Engineering 7, no. 11: 392. https://doi.org/10.3390/jmse7110392
APA StyleDu, L., Lin, Z., Jiang, Y., Li, P., & Dong, Y. (2019). Numerical Investigation on the Scale Effect of a Stepped Planing Hull. Journal of Marine Science and Engineering, 7(11), 392. https://doi.org/10.3390/jmse7110392