State-of-the-Art Research on Motion Control of Maritime Autonomous Surface Ships



Abstract
:1. Introduction
2. Characteristics and System Composition of MASS
2.1. Research Status of USV
- Classification according to ship types: USV has a variety of ship types, including planning boat, hydrofoil boat, single-hull ship, multi-hull ships and so on. In order to improve the stealthy performance and platform stability, it can even be designed as semi-submersible. The ships developed in the early period are mostly single hull. With the development of technology, the development of the catamaran has increased and the trimarans have also been involved because they have higher system stability and can reduce the risk of USV navigation. Besides, according to the different functions, the USV hull developed by various countries has many characteristics in material and form, most of them are rigid shell inflatable boats, mainly because of their stronger durability and payload capacity.
- Classification according to applications: USV has a wide range of applications in civil and military fields, such as environmental monitoring, meteorological forecasting, marine biology research, deep water sample collection, hydrological observation, nautical chart drawing, underwater communication relay, marine resource exploration and exploitation, territorial surveillance, etc. The application of USV in the civil field is more and more extensively, which not only provides a guarantee for marine exploration and ship navigation safety but also provides data support for scientific research.
- Classification according to ways of propulsion: USV can be propelled by traditional propeller and rudder, hydraulic jet propulsion, methanol fuel cells or full electric propulsion, and even new environmentally friendly propulsion methods such as solar energy, windsurfing, and ocean energy. Generally speaking, USV is generally promoted by clean energy, and a few by mixed propulsion, which shows that the current development of USVs has strong development potential.
2.2. Research Status of MASS
2.3. Characteristics of Large MASS
- Large mass, large inertia, long-stroke, slow disappearance of remaining speed. When a ship has just stopped, the ship speed drops rapidly due to the large resistance. However, as the ship speed decreases, the ship resistance decreases accordingly. It is more difficult to stop the ship completely. Generally, when the ship speed is 3–4 knots, it has no rudder effect, so the performance of emergency stopping is poor.
- Poor turning performance. Because of its large size, the rudder control has a certain rudder turning rate, so course stability and responsiveness are poor.
- Weak response of rudder angles. The rudder angle within 5 has little effect and must be corrected with a large rudder angle [39].
- Susceptible to external interfere factors. As the ship scale is very large, the ship area above the waterline is affected by wind and the influence of current is increased. When the large ship suffers crosswinds, its drift velocity can reach 4–5% wind speed [40].
- Ship–ship and ship-bank effects. When docking, the pressure difference between the side of the ship and the water and the shore wall causes the ship to be “dragged”. Generally, when the distance between the ship and the shore reaches 1.7 times the width of the ship, the influence of the shore wall can be shown [41]. This effect becomes larger with narrower channel width, shallower water depth, closer ship to shore, higher speed and larger ship shape.
2.4. System Composition of MASS
3. Classification of Motion Control for MASS
- Ship speed controlFor the traditional diesel engine ships, the speed is controlled by the engine telegraph and adjusted in different grades. For electric propulsion ships, speed control is mainly to control the rotation speed of the propeller, which can be adjusted arbitrarily in a certain range. It has great significance for the navigation of the MASS, maintaining the course and navigation of the ship according to the prescribed route.
- Course controlIn ship attitude control, course control is very important. For ships with rudder and propeller control, the course control can be attributed to the rudder control. For ships with vector thrusters such as pod propulsion and shaftless rim driven thruster, the course is controlled by the steering of vector thrusters. The course control mainly includes two aspects: stability and mobility, shown in Figure 5. In order to shorten the sailing time and reduce fuel consumption, the ship can maintain a straight-line navigation at a certain speed, which is ship course stability. When the ship needs to avoid other ships or obstacles while sailing on a predetermined route, or navigating within a limited channel, it is necessary to change the speed and course in time, which is the ship course mobility.The design of the general course controller has no speed control [49,50]. Because controlling the course and speed at the same time increases the complexity [51], they are usually independent. However, in a ship with double thrust, it is necessary to adjust the speed of the double propellers to achieve course control. At this time, the course control and speed control are coupled to control [52].
- Stabilization controlDue to the requirements of various practical mission, it is necessary for the MASS to maintain its position by relying on its own, that is stabilization control. It mainly includes dynamic positioning (DP) and docking control. Among them, docking control is much more difficult than tracking control, because all degrees of freedom (DOF) of system configuration or attitude must be stabilized. Due to the importance and challenge of theoretical research, the stabilization control has become a focus of attention. At present, large-scale cargo ships mainly rely on tugboats [53,54,55,56], but in the future MASS should be automatically docking.
- Path-following controlThe path-following problem is the geometric position tracking without considering time. According to the geometry of the flight path, the path-following control problem can be divided into two categories: linear path-following control and curve path-following control. From the point of view of the control object, there is no essential difference between them, but from the point of view of controller design, the main difference is that the linear path-following control is a stabilization control in a smaller area near the equilibrium point. That means a certain linearization of the model or ignoring the lateral drift can meet the control requirements under certain conditions. In contrast the curve path-following control needs to consider the ship maneuvering motion, and the lateral drift cannot be ignored.
- Trajectory tracking controlTrajectory tracking problems require the system to arrive at a specified location at a specified time, which is generally much more difficult than the path-following. However, in the case of uncertain speed, due to the lateral drift, the path-following control problem of the curve is not easier to implement than the trajectory tracking control problem. In addition, trajectory tracking is often for partial variables, so it is unrealistic to require all variables of the system to track their trajectories independently. In actual navigation, most of the trajectory tracking control belongs to the path-following problem. These two kinds of trajectory controls are illustrated in Figure 6.
4. Motion Control Algorithms
4.1. Discussion on the Application Algorithm of Ship Motion Control
4.1.1. Course Control
4.1.2. Stabilization Control
4.1.3. Path-Following Control
4.1.4. Trajectory Tracking Control
4.2. Description of Ship Motion Control Algorithms
4.2.1. Proportion Integral Derivative Algorithm
4.2.2. Fuzzy Logic Control Algorithm
4.2.3. Model Prediction Control Algorithm
4.2.4. Sliding Mode Control Algorithm
4.2.5. Active Disturbance Rejection Control Algorithm
- Reasonably arranging the input transition process of the system and extracting the differential: “tracking differentiator (TD)”.
- Choosing the appropriate feedback combination method: “non-linear combination”.
- Estimating the state variables and disturbances: “extended state observer(ESO)”.
- Making full use of the special non-linear effect of “non-linear state error feedback(NLSEF)” to design the ADRC. The controller effectively accelerates the convergence speed and improves the dynamic performance of the control system.
4.2.6. Optimization Algorithm
4.2.7. Artificial Intelligence
4.3. Summary of Ship Motion Control Research
- In practice, a ship is 6-DOF, and usually only left-right symmetry and front-back asymmetry. Current research is mostly based on the 3-DOF symmetrical ship model or 4-DOF model, which leads to the fact that the current model of the ship is inconsistent with the facts, thus greatly reducing the reference and control accuracy of the motion controller designed based on the model.
- According to the Section 4.2, the relationship of ship motion control algorithms is summarized as shown in the Figure 12. The intersection of squares in the graph indicates that the ideas of the algorithms can be integrated, and the arrow indicates that the algorithms are used in coordination with each other to improve the ship motion control effect.Current ship control algorithms have their own advantages and disadvantages. The common methods are to integrate each other to make up for the inherent shortcomings of their own. The current research algorithm is summarized as follows.
- (a)
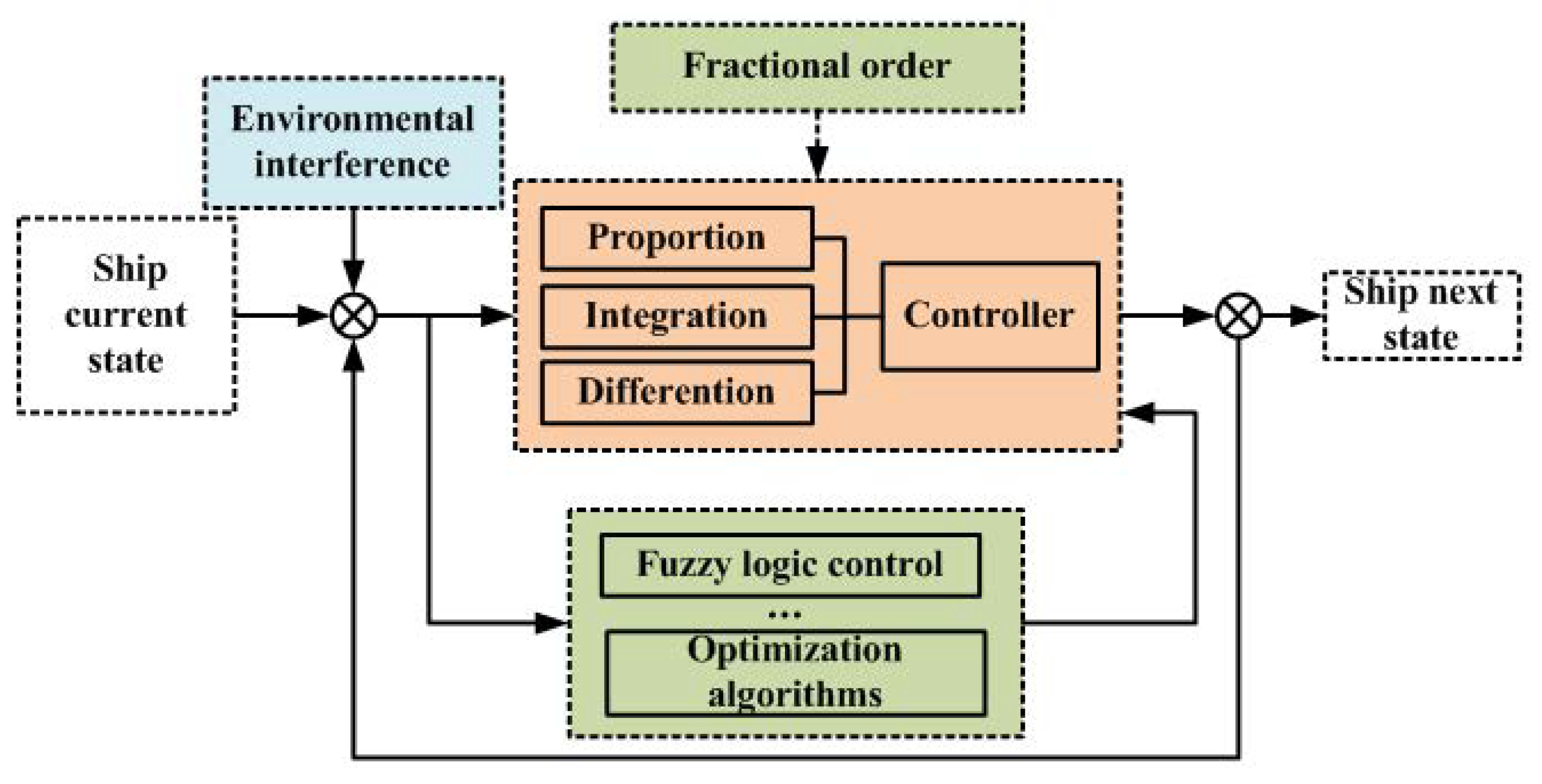
- At present, the application of the PID control algorithm in ship motion is mainly based on the introduction of basic PID into other optimization algorithms, which can better meet the requirements of the adaptability of the ship control system. However, there are doubts about whether the search range of parameters needs to be set before the parameters are adjusted, and how to ensure the precise control of complex systems. In addition, the fractional-order PID and its combination with the optimization algorithm and prediction algorithm can be further studied.
- (b)
- Fuzzy control is applicable to the control problem of a complex system that cannot be described by a mathematical model. It is often combined with the PID algorithm to realize ship motion control step by step or integration. The introduction of an optimization algorithm can enhance the adaptability of the algorithm and reduce the dependence on artificial parameters. On the whole, fuzzy control for ship control can reduce overshoot and shorten the time to achieve the goal. Fuzzy logic control has strong subjectivity and is mainly used in rough preliminary judgment stage. In the stage of fine judgment, we need to make up for the defects caused by subjective judgment. It can try to integrate other optimization algorithms with the fuzzy algorithm or fuzzy PID algorithm.
- (c)
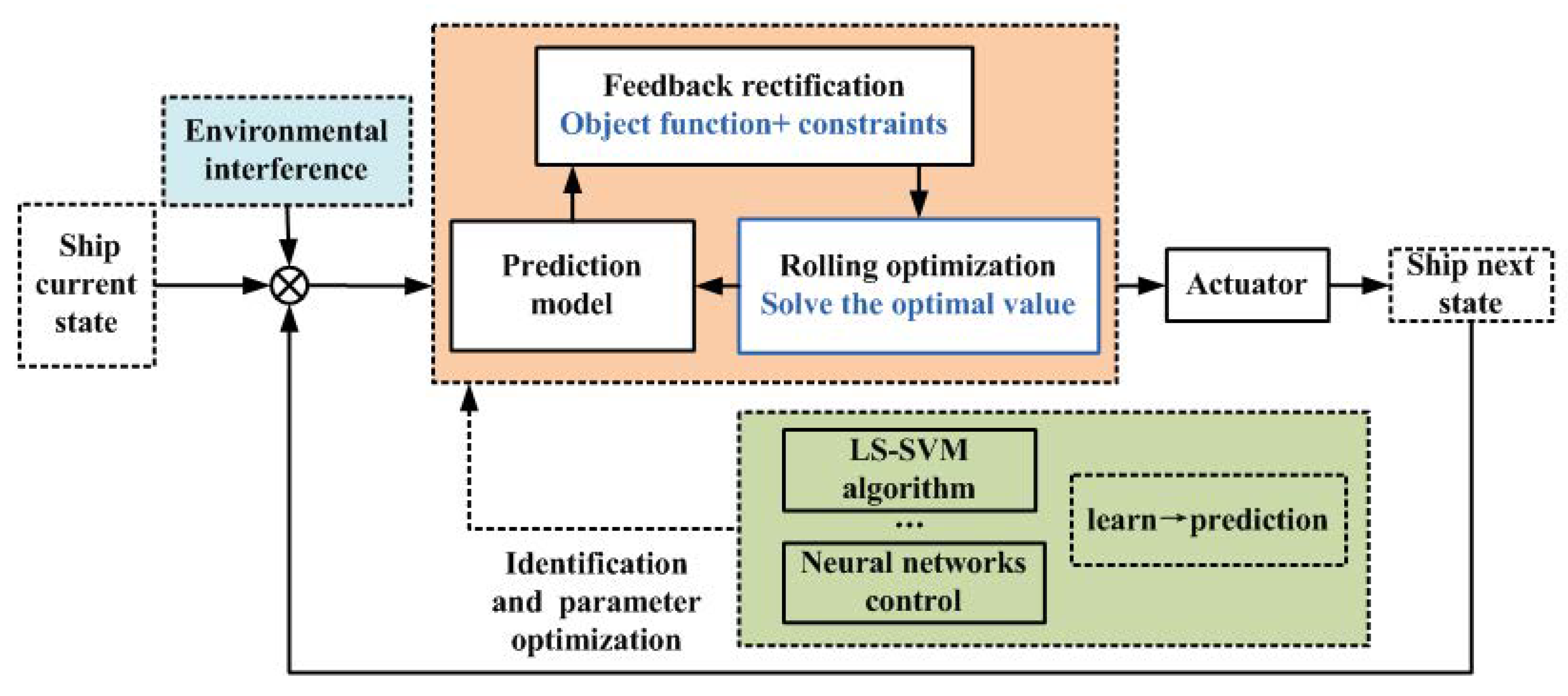
- The prediction algorithm can deal with nonlinear system problems such as multiple input, multiple output, and multiple constraints, and is suitable for large cargo ship motion systems. However, the controller design needs to consider both the approach error of the model and the real-time performance of the system. In the future, the logic of MPC can be combined with a variety of algorithms. How to combine predictive control with other algorithms and how to adjust the parameters in the algorithm are the future research points.
- (d)
- Sliding mode control is mainly developed from classical sliding mode control or its own improved algorithm to the combination of backstepping and adaptive methods and then developed to introduce observers or intelligent algorithms for further error reduction. It gradually compensates for the shortcomings of sliding mode control, reduces chattering and enhances its robustness. Further fusion and improvement with machine learning can be considered to deal with the uncertainties of model parameters and external disturbances.
- (e)
- ADRC has strong anti-interference ability, a simple algorithm, convenient digital implementation, small overshoot, and fast response. However, stability analysis is difficult and parameter setting is difficult. It is necessary to use the optimization algorithm for parameter selection. ADRC consists of four parts, which are often modified for the NLSEF part to improve control efficiency. Whether the other parts can also be improved, such as fractional order PID, also introduced fractional order.
- (f)
- The application of the optimization algorithm improves the adaptability of ship control, but the calculation results of the intelligent algorithm are random, and the application and research of the optimization algorithm are not comprehensive. Most optimization algorithms are not applied in the field of ship control.
- (g)
- The application of AI in the shipping field is increasing gradually, and it has become an advanced control algorithm. It is mainly used for ship trajectory tracking, path planning, and obstacle avoidance. The application of AI technology in underwater ships and surface water ships can learn from each other.
- The nonlinear ship system has many uncertain factors, so it is difficult to build accurate ship models. Using control algorithms that do not require precise models to process is a commonly used method at present. Therefore, reducing the dependence of the control algorithm on model is the development direction of research.
- The inherent constraints such as maneuverability, maneuverability, and actuator saturation are seldom considered in controller design. At the same time, the general controller needs the high order derivative information of the system state, which is difficult to satisfy in the practical application.
- The research on the automatic docking of the ship is less than that of the other ones. The main algorithms are NN and PID. The tugboat is mainly used to realize the docking of the cargo ship.
- The model parameters of large ships are difficult to accurately obtained. At present, most of the research only carried out theoretical analysis and verification of the motion control algorithm in the simulation environment, or equal-scale model ship experiment, full-scale ship experiment is rare.
5. Challenges and Prospects of Research on Motion Control of MASS
- In recent years, the production and research of USV have increased gradually. However, the development of large MASS is difficult than smaller USV, so most of the research can only use ships with known parameters, lacking the diversity of ship research and the universality of the results.
- Because of the large size of MASS,
- (a)
- The influence of the external environment on MASS is more obvious than that of USV. Therefore, how to establish a more accurate wave and wind interference model is one of the key points in MASS research process.
- (b)
- Current research is mostly based on simulation, and how to carry out ship experiment on the results of motion control research is a difficult problem.
- Current research on ship models are mostly based on the fully symmetrical three degrees of freedom, which is different from the facts, so it reduces the accuracy of motion controller control. At present, how to increase the degree of freedom of the motion control model of MASS, and how to build the propulsion model of multi-propeller, multi-rudder, pod propulsion and shaftless rim driven thruster become one of the important factors for the accuracy of the motion control of MASS. On this basis, the dynamic performances of various motions in still water, waves and surges are quite different, so the propulsion and control systems need to be further studied.
- The structure of MASS is complex. With the addition of intelligent equipment, the uncertainty of equipment control is more than that of conventional ships, and the more constraints and influencing factors need to be considered.
- Automatic docking and undocking is particularly important for the fulfill of MASS. It is an important and difficult research direction. How to establish an accurate model and control rate is one of the research focuses on MASS stabilization control. It needs further study and can be converted into practical application.
- The control algorithm is usually based on the existing conventional control algorithm or a hybrid algorithm which makes use of its own advantages to compensate each other. It has its own shortcomings such as high complexity and poor real-time performance. Moreover, the algorithm requires high accuracy, strong dependence, self-adaptability and robustness of the ship model.
- (a)
- The order of the controller has some influence on the control effect, such as high order ADRC and fractional-order PID. Therefore, the control effect of the controller under different orders can be considered in the future.
- (b)
- Prediction idea can be widely combined with other algorithms, and an optimization algorithm can be used to adjust the parameters of the predictive control algorithm.
- (c)
- Because different devices adopt different algorithms, and the algorithm itself has certain errors, it is necessary to control the algorithm as a whole and set compensatory parameters according to the errors of input and output results.
- (d)
- optimization algorithm has a certain randomness, and it is possible to get the local optimal solution, which makes the adjustment of control system parameters deviate. Therefore, it is necessary to calculate many times or improve the optimization algorithm.
- (e)
- For the research of AI technology in the ship field, we can try to use the learning trajectory of other motion controllers to guide the learning process. In addition, AI technology has not been applied to the field of autonomous docking of ships. In the future, AI technology can be considered for docking and even the whole navigation process.
- (f)
- The neural network algorithm in the optimization algorithm occupies an important position in AI technology, which indicates the possibility of combining the two. At present, there is a research on combining bat algorithm (BA) with Q-learning. The bat Q-learning algorithm is designed by these two algorithms to realize Q-value sharing strategy [240]. In the future, we can consider combining other optimization algorithms with AI.
- (g)
- In terms of parameter tuning, it is a future research point to choose an appropriate optimization algorithm under different conditions.
- (h)
- The applicability of different control algorithms for different ship types needs to be studied.
- Due to the safety, cost, and size of MASS, how to carry out MASS experiments is the focus of future research.
- The level of autonomy of MASS represents the mission execution ability of the system. Current research on ship motion control only focuses on a single type of motion, and there is no complete response strategy for the whole ship from sailing to docking. MASS undertakes the cargo transportation process. Because the whole process is unmanned, a complete set of autonomous control strategy is needed to enhance the adaptability of MASS to various types of motion control. In this paper, an autonomous control strategy is proposed, as shown in the Figure 13.As can be seen from Figure 13, the controller of the MASS motion control system should have the function of judging the motion state of the ship and selecting the algorithms. The system judges the current state of ship motion (such as normal navigation, docking or emergency), then the control decision system chooses the current motion instructions and the appropriate control algorithm. Because the adaptive control algorithms for different ships are not identical, the control system algorithm library can be added to make the control system switch more appropriate control strategies according to the situation (such as environmental disturbance), so as to obtain better robustness.
- The current research results of under-actuated mechanical systems, such as robots and spacecraft, are far more abundant than those of control systems because the nonlinear characteristic is the same. It can be considered that the mature control methods in these fields can be applied to the motion control of MASS. While realizing the autonomy of MASS, it also establishes the foundation for the future integration of all-round unmanned systems of land, sea, and air.
Author Contributions
Funding
Conflicts of Interest
References
- Shenoi, R.A.; Bowker, J.A.; Dzielendziak, A.S.; Lidtke, A.K.; Zhu, G.; Cheng, F.; Argyos, D.; Fang, I.; Gonzalez, J.; Johnson, S.; et al. Global Marine Technology Trends 2030; Technical Report; University of Southampton: Southampton, UK, 2015. [Google Scholar]
- Maritime Safety Committee (MASC). 98th Session. Available online: http://www.imo.org/en/MediaCentre/MeetingSummaries/MSC/Pages/MSC-98th-session.aspx (accessed on 16 June 2017).
- Maritime Safety Committee (MSC). 99th Session. 16–25 May 2018. Available online: http://www.imo.org/en/MediaCentre/MeetingSummaries/MSC/Pages/MSC-99th-session.aspx (accessed on 25 May 2018).
- Maritime Safety Committee (MSC). 100th Session. 3–7 December 2018. Available online: http://www.imo.org/en/MediaCentre/MeetingSummaries/MSC/Pages/MSC-100th-session.aspx (accessed on 7 December 2018).
- US Navy. The Navy Unmanned Surface Vehicle (USV) Master Plan; Technical Directive; Department of the Navy: Washington, DC, USA, 2007.
- Bertram, V. Unmanned surface vehicles—A survey. Skibsteknisk Selsk. 2008, 1, 1–14. [Google Scholar]
- Motwani, A. A Survey of Uninhabited Surface Vehicles; Technical Report; Marine and Industrial Dynamic Analysis, School of Marine Science and Engineering, Plymouth University: Plymouth, UK, 2012. [Google Scholar]
- Hai, T. New concept weapons in the future warfare. Shipborne Weapons 2006, 3, 70–77. [Google Scholar]
- He, P.; Yang, M.; Ma, Y. Global Naval Warfare Robot; Chinese People’s Liberation Army Publishing House: Beijing, China, 2012. [Google Scholar]
- Statheros, T.; Howells, G.; Maier, M.D. Autonomous ship collision avoidance navigation concepts, technologies and techniques. J. Navig. 2008, 61, 129–142. [Google Scholar] [CrossRef]
- Yang, W.R.; Chen, C.Y.; Hsu, C.M.; Tseng, C.J.; Yang, W.C. Multifunctional inshore survey platform with unmanned surface vehicles. Int. J. Autom. Smart Technol. 2011, 1, 19–25. [Google Scholar] [CrossRef]
- Zhu, W.; Zhang, L. Development of unmanned surface vehicle. Mar. Technol. 2017, 1, 1–6. [Google Scholar]
- Schiaretti, M.; Chen, L.; Negenborn, R.R. Survey on autonomous surface vessels: Part II-categorization of 60 prototypes and future applications. In International Conference on Computational Logistics; Bektaş, T., Coniglio, S., Martinez-Sykora, A., Voß, S., Eds.; Springer: Cham, Switzerland, 2017; pp. 234–252. [Google Scholar]
- Jan, R.ø. Maritime Unmanned Navigation through Intelligence in Networks: The Munin Project. In 12th International Conference on Computer and IT Applications in the Maritime Industries; Hamburg Technology University: Hamburg, Germany, 2013; pp. 177–183. [Google Scholar]
- Jokioinen, E. Remote and Autonomous Ships: The Next Steps; Technical Report; AAWA: London, UK, 2016. [Google Scholar]
- Rolls-Royce Demonstrates World’s First Remotely Operated Commercial Vessel. Available online: https://www.rolls-royce.com/media/our-stories/press-releases/2017/20-06-2017-rr-demonstrates-worlds-first-remotely-operated-commercial-vessel.aspx (accessed on 20 June 2017).
- Tommi, A.; Lauri, H. Challenges of Unmanned Vessels. Ph.D. Thesis, Novia University of Applied Sciences, Vaasa, Finland, 2017. [Google Scholar]
- Battery-Powered, Autonomous Barges Coming to European Ports. Available online: https://www.imarest.org/themarineprofessional/item/3988-battery-powered-autonomous-barges-coming-to-european-ports (accessed on 25 January 2018).
- The World’s First Intelligent Ship Made in China, the Arrival of the Intelligent Ship Era. Available online: http://news.wenweipo.com/2017/12/05/IN1712050048.htm (accessed on 5 December 2017).
- First Ever Container Ship to Receive Cyber Enabled Ship Descriptive. Available online: https://www.lr.org/en/latest-news/first-ever-container-ship-to-receive-cyber-enabled-ship/ (accessed on 1 January 2018).
- World’s First Unmanned Marine Ship Set to Start. Available online: http://www.eworldship.com/html/2016/NewShipUnderConstrunction_1102/121485.html (accessed on 2 November 2016).
- One Sea Ecosystem. Available online: https://www.dimecc.com/dimecc-services/one-sea-ecosystem/ (accessed on 30 September 2016).
- World’s First Test Area for Autonomous Ships Opened. Available online: https://www.sdir.no/en/news/news-from-the-nma/worlds-first-test-area-for-autonomous-ships-opened/ (accessed on 3 October 2016).
- Norway Sets Up Second Test Area for Unmanned Ships. Available online: https://worldmaritimenews.com/archives/231317/norway-sets-up-second-test-area-for-unmanned-ships/ (accessed on 2 October 2017).
- Norway Opens New Test Area for Autonomous Ships. Available online: https://worldmaritimenews.com/archives/237297/norway-opens-new-test-area-for-autonomous-ships/ (accessed on 7 December 2017).
- Test Area Grenland. Available online: http://nfas.autonomous-ship.org/projects-en.html (accessed on 22 December 2017).
- The World’s Largest, Asia’s First Unmanned Marine Test Site Officially Opened in Zhu Hai. Available online: https://news.sina.com.cn/o/2018-12-06/doc-ihprknvt2843014.shtml (accessed on 6 December 2018).
- Goal-Based Standards (GBS) Verification Process Is Underway. Available online: http://www.imo.org/en/MediaCentre/PressBriefings/Pages/02--GBS.aspx#.XZCtokYzbz0 (accessed on 3 January 2014).
- Zhou, Q.; Li, X.L.; Chen, B. Vibration response prediction and control of a super large bulk carrier. Noise Vib. Control 2014, 34, 47–50. [Google Scholar]
- Peri, D. Robust design optimization for the refit of a cargo ship using real seagoing data. Ocean Eng. 2016, 123, 103–115. [Google Scholar] [CrossRef]
- Uyar, E.; Alpkaya, A.T.; Mutlu, L. Dynamic modelling, investigation of manoeuvring capability and navigation control of a cargo ship by using matlab simulation. IFAC-PapersOnLine 2016, 49, 104–110. [Google Scholar] [CrossRef]
- Zhu, M.; Hahn, A.; Wen, Y.Q.; Bolles, A. Identification-based simplified model of large container ships using support vector machines and artificial bee colony algorithm. Appl. Ocean Res. 2017, 68, 249–261. [Google Scholar] [CrossRef]
- Wang, K.; Yuan, Y.P.; Yan, X.P.; Wan, J.L. Configuration demonstration and control design of clean propulsion systems for 5000 t bulk carriers. Ship Sci. Technol. 2015, 37, 67–71. [Google Scholar]
- Luo, X.B.; Wang, M.H. Study of solvent-based carbon capture for cargo ships through process modelling and simulation. Appl. Energy 2017, 195, 402–413. [Google Scholar] [CrossRef]
- Ammar, N.R.; Seddiek, I.S. Eco-environmental analysis of ship emission control methods: Case study RO-RO cargo vessel. Ocean Eng. 2017, 137, 166–173. [Google Scholar] [CrossRef]
- Geertsma, R.D.; Negenborn, R.R.; Visser, K.; Hopman, J.J. Design and control of hybrid power and propulsion systems for smart ships: a review of developments. Appl. Energy 2017, 194, 30–54. [Google Scholar] [CrossRef]
- Mentes, A.; Akyildiz, H.; Yetkin, M.; Turkoglu, N. A FSA based fuzzy dematel approach for risk assessment of cargo ships at coasts and open seas of turkey. Saf. Sci. 2015, 79, 1–10. [Google Scholar] [CrossRef]
- Akyildiz, H.; Mentes, A. An integrated risk assessment based on uncertainty analysis for cargo vessel safety. Saf. Sci. 2017, 92, 34–43. [Google Scholar] [CrossRef]
- Liu, X. Discussion on improving the course stability of large ships. Mar. Technol. 2002, 1, 17–18. [Google Scholar]
- CMSC. Large Ship Maneuvering; China Communications Press: Beijing, China, 2012. [Google Scholar]
- Liu, T. Risk control of large ships sailing in shallow waters. Marit. China 2016, 1, 82–83. [Google Scholar]
- Fossen, T. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: West Sussex, UK, 2011. [Google Scholar]
- Xia, G.; Shao, X.; Zhao, A. Robust nonlinear observer and observer-backstepping control design for surface ships. Asian J. Control 2015, 17, 1377–1393. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Sun, X.; Qiu, B. Modeling and identification for vector propulsion of an unmanned surface vehicle: Three degrees of freedom model and response model. Ind. Control Comput. 2018, 18, 1889. [Google Scholar] [CrossRef]
- Sonnenburg, C.R.; Woolsey, C.A. Modeling, identification, and control of an unmanned surface vehicle. J. Field Robot. 2013, 30, 371–398. [Google Scholar] [CrossRef]
- Abkowitz, M.A. Measurement of hydrodynamic characteristics from ship maneuvering trials by system identification. SNAME Trans. 1980, 88, 283–318. [Google Scholar]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2014, 20, 37–52. [Google Scholar] [CrossRef]
- Nomoto, K.; Taguchi, K.; Honda, K.; Hirano, S. On the steering qualities of ships. J. Zosen Kiokai 1956, 99, 75–82. [Google Scholar] [CrossRef]
- Wang, Y.L.; Han, Q.L. Network-based heading control and rudder oscillation reduction for unmanned surface vehicles. IEEE Trans. Control Syst. Technol. 2017, 25, 1609–1620. [Google Scholar] [CrossRef]
- Larrazabal, J.M.; Peñas, M.S. Intelligent rudder control of an unmanned surface vessel. Expert Syst. Appl. 2016, 55, 106–117. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control Syst. Technol. 2015, 23, 820–827. [Google Scholar] [CrossRef]
- Jin, J.; Zhang, J.; Liu, D. Design and verification of heading and velocity coupled nonlinear controller for unmanned surface vehicle. Sensor 2018, 18, 3427. [Google Scholar] [CrossRef]
- Bui, V.P.; Kim, Y.B.; Yong, W.C.; Kawai, H. A study on automatic ship berthing system design. In Proceedings of the International Conference on Networking, Sensing and Control, Okayama, Japan, 26–29 March 2009; Chen, X.K., Takefumi, K., Eds.; IEEE: Piscataway, NJ, USA, 2008; pp. 181–184. [Google Scholar]
- Bui, P.V.; Kim, Y.B. Development of constrained control allocation for ship berthing by using autonomous tugboats. Int. J. Control Autom. Syst. 2011, 9, 1203–1208. [Google Scholar]
- Bui, V. Ship trajectory tracking in harbour area by using autonomous tugboats. IFAC Proc. Vol. 2012, 45, 740–745. [Google Scholar] [CrossRef]
- Bui, V.P.; Ji, S.W.; Choi, K.H.; Kim, Y.B. Nonlinear observer and sliding mode control design for dynamic positioning of a surface vessel. In Proceedings of the 12th International Conference on Control, Automation and Systems, JeJu Island, Korea, 17–21 October 2012; Shim, B.K., Kang, K., Lee, W.S., Won, J.B., Han, S.H., Eds.; IEEE: Piscataway, NJ, USA, 2012; pp. 1900–1904. [Google Scholar]
- Aschemann, H.; Wirtensohn, S.; Reuter, J. Nonlinear observer-based ship control and disturbance compensation. IFAC-PapersOnline 2016, 49, 297–302. [Google Scholar] [CrossRef]
- Popov, I.; Koschorrek, P.; Haghani, A. Adaptive kalman filtering for dynamic positioning of marine vessels. IFAC-PapersOnLine 2017, 50, 1121–1126. [Google Scholar] [CrossRef]
- Fossen, T.I.; Lekkas, A.M. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents. Int. J. Adapt. Control Signal Process. 2017, 31, 445–463. [Google Scholar] [CrossRef]
- Fang, M.C.; Zhuo, Y.Z.; Lee, Z.Y. The application of the self-tuning neural network PID controller on the ship roll reduction in random waves. Ocean Eng. 2010, 37, 529–538. [Google Scholar] [CrossRef]
- Xiong, Y.; Hu, J.J. Research of ship motion based on fuzzy control. Int. J. Control Autom. 2016, 9, 137–148. [Google Scholar]
- Zuo, X. Design of usv course control based on dynamic matrix control (DMC). Ind. Control Comput. 2016, 29, 44–45. [Google Scholar]
- Liu, Z.Q.; Gu, W.; Gao, D.J. Ship course keeping using eigenvalue decomposition adaptive sliding mode control. In Proceedings of the Techno-Ocean, Kobe, Japan, 6–8 October 2016; IEEE: Piscataway, NJ, USA, 2017; pp. 687–691. [Google Scholar]
- Liu, Y.; Guo, C.; Lei, Z. Intelligent control based on ADRC for large container ship course keeping. Lect. Notes Electr. Eng. 2013, 254, 195–206. [Google Scholar]
- Layek, A.; Vien, N.A.; Chung, T.; Tuyenet, L.P. Deep reinforcement learning algorithms for steering an underactuated ship. In Proceedings of the 2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Daegu, Korea, 16–18 November 2017; Ko, H., Lee, J., Oh, S., Hanebeck, U.D., Eds.; IEEE: Piscataway, NJ, USA, 2017; pp. 602–607. [Google Scholar]
- Tomera, M. Ant colony optimization algorithm applied to ship steering control. Procedia Comput. Sci. 2014, 35, 83–92. [Google Scholar] [CrossRef]
- Chen, G.Q. Research on precise intelligent heading control of large ship autopliot system. Ship Sci. Technol. 2016, 38, 145–147. [Google Scholar]
- Li, D.S. Research on intelligent course controller of ship based on genetic algorithm and fuzzy control theory. Ship Sci. Technol. 2017, 39, 34–36. [Google Scholar]
- Ejaz, M.; Chen, M. Optimal backstepping control for a ship using firefly optimization algorithm and disturbance observer. Trans. Inst. Meas. Control 2018, 40, 1983–1998. [Google Scholar] [CrossRef]
- Li, G.Y. Research on Particle Swarm Optimized Fractional-Order Controller and Its Application to Control for Underactuated Surface Vessels. Ph.D. Thesis, Dalian Maritime University, Dalian, China, 2016. [Google Scholar]
- Zhang, A.M.; Sun, J.; Huang, J.; Liu, J. Marine course control based on fractional-order piλdμ. Ship Sci. Technol. 2016, 38, 87–90. [Google Scholar]
- Liu, W.J.; Sui, Q.M.; Zhou, F.Y.; Hu, G.S. Active disturbance rejection controller design and simulation for ship course based on bech’s equation. Ship Eng. 2011, 33, 61–64. [Google Scholar]
- Mizuno, N.; Matsumoto, S. Design and Evaluation of Simple Ship’s Automatic Maneuvering System Using Sliding Mode Controller. IFAC Proc. Vol. 2013, 46, 67–72. [Google Scholar] [CrossRef]
- Zhang, W.J.; Liu, Z.J.; Yin, J.C. Time-delay wavelet network predictor based on sensitivity analysis with application to predictive ship course control. J. Comput. Methods Sci. Eng. 2016, 16, 391–402. [Google Scholar] [CrossRef]
- Chang, W.J.; Hsu, F.L. Sliding mode fuzzy control for takagi-sugeno fuzzy systems with bilinear consequent part subject to multiple constraints. Inf. Sci. 2016, 327, 258–271. [Google Scholar] [CrossRef]
- Liang, C.Z. Research on intelligent control method of self-learning fuzzy neural network for ship course. Ship Sci. Technol. 2017, 39, 58–60. [Google Scholar]
- Liu, Z.Y.; Liu, W.; Fu, M.Y.; Shi, X.C. Heading control of air cushion vehicles based on adaptive fuzzy ADRC. Inf. Control 2011, 40, 747–752. [Google Scholar]
- Shi, X.C.; Liu, Z.Y.; Fu, M.Y.; Wang, J. Course control of air cushion vehicle based on SVM-ADRC. J. Huazhong Univ. Sci. Technol. Nat. Sci. Ed. 2012, 40, 59–63. [Google Scholar]
- Liu, G.Y.; Hou, Y.B.; Luo, Y.; Li, D. Genetic algorithm’s application for optimization of PID parameters in dynamic positioning vessel. MATEC Web Conf. 2017, 139, 00153. [Google Scholar]
- Liyun, W.; Jianmei, X.; Xihuai, W. Ship dynamic positioning systems based on fuzzy predictive control. Telkomnika 2013, 11, 6769–6779. [Google Scholar] [CrossRef]
- Xia, G.Q.; Liu, J.; Chen, X.H.; Wang, D.P.; Yang, R.T. EKF based model identification for a relaxed dynamic positioning ship using NMPC method. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; Guo, S., Takamatsu, X., Eds.; IEEE: Piscataway, NJ, USA, 2015; pp. 1313–1318. [Google Scholar]
- Ianagui, A.S.S.; Tannuri, E.A. Cooperative sliding mode control applied to a fleet of dp vessels. IFAC-PapersOnline 2015, 48, 299–304. [Google Scholar] [CrossRef]
- Lei, Z.L.; Chen, G.; Yang, L. Ship dynamic positioning decoupling control based on ADRC. Adv. Intell. Syst. Comput. 2014, 213, 443–455. [Google Scholar]
- Wu, D.F.; Ren, F.K.; Yin, Z.B. Design of active disturbance rejection controller for marine dynamic positioning system based on artificial bee colony algorithm. Ship Eng. 2015, 37, 52–56. [Google Scholar]
- Qian, X.B.; Yin, Y.; Zhang, X.F.; Sun, X.F. Application of model prediction control in ship dynamic positioning simulator. J. Syst. Simul. 2016, 28, 2620–2625. [Google Scholar]
- Wang, G.; Li, W.H.; Quan, C.H.; Lin, B.H. Model predictive control of ship dynamic positioning with state estimator. J. Dalian Marit. Univ. 2015, 41, 24–28. [Google Scholar]
- Tran, V.L.; Im, N. A study on ship automatic berthing with assistance of auxiliary devices. Int. J. Naval Arch. Ocean Eng. 2012, 4, 199–210. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, Y.A. Automatic ship berthing using artificial neural network based on virtual window concept in wind condition. In Proceedings of the 13th IFAC Symposium on Control in Transportation Systems, Sofia, Bulgaria, 12–14 September 2012; Todor, S., Ed.; Bulgarian National Committee of IFAC: Sofia, Bulgaria, 2012; pp. 286–291. [Google Scholar]
- Ahmed, Y.A.; Hasegawa, K. Implementation of automatic ship berthing using artificial neural network for free running experiment. IFAC Proc. Vol. 2013, 46, 25–30. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, Y.A.; Hasegawa, K. Automatic ship berthing using artificial neural network trained by consistent teaching data using nonlinear programming method. Eng. App. Artif. Intell. 2013, 26, 2287–2304. [Google Scholar] [CrossRef]
- Ahmed, Y.A. Experiment results for automatic ship berthing using artificial neural network based controller. IFAC Proc. Vol. 2014, 47, 2658–2663. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, Y.A.; Hasegawa, K. Artificial neural network based automatic ship berthing combining PD controlled side thrusters—A combined controller for final approaching to berth. In Proceedings of the 13th International Conference on Control Automation Robotics & Vision, Singapore, 10–12 December 2014; IEEE: Piscataway, NJ, USA, 2015; pp. 1304–1309. [Google Scholar]
- Yang, Z.; Wang, J.H.; Wu, Y.P. Straight line path following of unmanned surface vessel based on fuzzy PID. Comput. Eng. 2014, 40, 270–274. [Google Scholar]
- Hu, Y.; Park, G.K.; Wu, H.; Zhang, Q. Robust adaptive fuzzy design for ship linear-tracking control with input saturation. Int. J. e-Navig. Marit. Econ. 2017, 6, 9–16. [Google Scholar] [CrossRef]
- Pavlov, A.; Nordahl, H.; Breivik, M. MPC-based optimal path following for underactuated vessels. IFAC Proc. Vol. 2009, 42, 340–345. [Google Scholar] [CrossRef]
- Fossen, T.; Breivik, M.; Skjetne, R. Line-of-sight path following of underactuated marine craft. IFAC Proc. Vol. 2003, 36, 211–216. [Google Scholar] [CrossRef]
- Huang, H.Y.; Fan, Y.S. Path following for unmanned surface vessels based on adaptive LOS guidance and ADRC. Iconip Part VI 2017, 1, 192–200. [Google Scholar]
- Shen, H.; Guo, C. Path-following control of underactuated ships using actor-critic reinforcement learning with MLP neural networks. In Proceedings of the 2016 Sixth International Conference on Information Science and Technology (ICIST), Dalian, China, 6–8 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 317–321. [Google Scholar]
- Kapetanović, N.; Bibuli, M.; Mišković, N.; Caccia, M. Real-time model predictive line following control for underactuated marine vehicles. IFAC-PapersOnLine 2017, 50, 12374–12379. [Google Scholar] [CrossRef]
- Martinsen, A.B.; Lekkas, A.M. Straight-path following for underactuated marine vessels using deep reinforcement learning. IFAC-PapersOnLine 2018, 51, 329–334. [Google Scholar] [CrossRef]
- Zhang, L.; Qiao, L.; Chen, J.; Zhang, W. Neural-network-based reinforcement learning control for path following of underactuated ships. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; Chen, J., Zhao, Q.C., Eds.; IEEE: Piscataway, NJ, USA, 2016; pp. 5786–5791. [Google Scholar]
- Shen, Z.P.; Dai, C.S. Iterative sliding mode control based on reinforced learning and used for path tracking of under-actuated ship. J. Harbin Eng. Univ. 2017, 38, 697–704. [Google Scholar]
- Malecki, J. Applying of fuzzy logic to precise control of the ship motion. In Proceedings of the Second International Conference on Mathematics and Computers in Sciences and in Industry, Sliema, Malta, 17 August 2015; Guerrero, J.E., Ed.; IEEE: Piscataway, NJ, USA, 2016; pp. 125–130. [Google Scholar]
- Xiao, H.Z.; Chen, C.L.P.; Li, T.S.; Han, M. General projection neural network based nonlinear model predictive control for multi-robot formation and tracking. IFAC-PapersOnline 2017, 50, 838–843. [Google Scholar] [CrossRef]
- Mizuno, N.; Saka, N.; Katayama, T. A ship’s automatic maneuvering system using optimal preview sliding mode controller with adaptation mechanism. IFAC-PapersOnline 2016, 49, 576–581. [Google Scholar] [CrossRef]
- Li, R.H.; Li, T.S.; Bu, R.X. Active-disturbance-rejection control based underactuated surface vessel path following. J. Dalian Marit. Univ. 2013, 39, 5–8. [Google Scholar]
- De Paula, M.; Acosta, G.G. Trajectory tracking algorithm for autonomous vehicles using adaptive reinforcement learning. In Proceedings of the OCEANS 2015-MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–8. [Google Scholar]
- Sethuramalingam, T.; Nagaraj, B. A proposed system of ship trajectory control using particle swarm optimization. Procedia Comput. Sci. 2016, 87, 294–299. [Google Scholar] [CrossRef] [Green Version]
- Hu, K.; Liu, C.B. Submarine depth ADRC controller based on PSO near surface. In Proceedings of the 30th Chinese Control Conference, Yantai, China, 22–24 July 2011; Zhang, J.F., Zhao, Q.C., Eds.; IEEE: Piscataway, NJ, USA, 2011; pp. 3580–3584. [Google Scholar]
- Park, B.S.; Kwon, J.W.; Kim, H. Neural network-based output feedback control for reference tracking of underactuated surface vessels. Automatica 2017, 77, 353–359. [Google Scholar] [CrossRef]
- Zheng, X.L.; Zhao, X.D.; Li, R.; Yin, Y.F. Adaptive neural tracking control for a class of switched uncertain nonlinear systems. Neurocomputing 2015, 168, 320–326. [Google Scholar] [CrossRef]
- Haseltalab, A.; Negenborn, R.R. Adaptive control for a class of partially unknown non-affine systems: Applied to autonomous surface vessels. IFAC-PapersOnLine 2017, 50, 4252–4257. [Google Scholar] [CrossRef]
- Yan, Y.; Yu, S.H. Sliding mode tracking control of autonomous underwater vehicles with the effect of quantization. Ocean Eng. 2018, 151, 322–328. [Google Scholar] [CrossRef]
- Li, W.; Ma, W. Simulation on vessel intelligent collision avoidance based on artificial fish swarm algorithm. Pol. Marit. Res. 2016, 23, 138–143. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.D.; Rong, D.; Zhang, L.Y. The application research for ship collision avoidance with hybrid optimization algorithm. In Proceedings of the IEEE International Conference on Information & Automation, Ningbo, China, 1–3 August 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 760–767. [Google Scholar]
- Kim, D.; Hirayama, K.; Okimoto, T. Ship collision avoidance by distributed tabu search. Transnav Int. J. Mar. Navig. Saf. Sea Transport. 2015, 9, 23–29. [Google Scholar] [CrossRef]
- Fossen, T.I. Marine Control System-Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles; Marine Cybemetics: Trondheim, Norway, 2002. [Google Scholar]
- Stateczny, A.; Burdziakowski, P. Universal autonomous control and management system for multipurpose unmanned surface vessel. Pol. Marit. Res. 2019, 26, 30–39. [Google Scholar] [CrossRef] [Green Version]
- Namkyun, I.; Hasegawa, K. All direction approach automatic berthing controller using ANN (artifical neural networks). IFAC Proc. Vol. 2007, 40, 300–304. [Google Scholar] [CrossRef]
- Wu, Y.P.; Wang, J.H.; Yang, Z. Straight path tracking method of an unmanned surface vehicle based on fuzzy control. Comput. Meas. Control 2014, 22, 1394–1397. [Google Scholar]
- Moradi, M.H.; Katebi, M.R. Predictive PID control for ship autopilot design. IFAC Proc. Vol. 2001, 34, 375–380. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, J.; Shao, F.; Jin, J.C.; Mao, X.P. LQR-based waypoint tracking control of catamaran USV with double propulsion system. Inf. Control 2017, 46, 587–592. [Google Scholar]
- Balmat, J.F.; Lafont, F.; Maifret, R.; Pessel, N. A decision-making system to maritime risk assessment. Ocean Eng. 2011, 38, 171–176. [Google Scholar] [CrossRef]
- Liao, Y.L.; Wan, L.; Zhuang, J.Y. An embedded motion control system for water-jet-propelled unmanned surface vehicles. Chin. High Technol. Lett. 2012, 22, 416–422. [Google Scholar]
- Dong, Z.P.; Wan, L.; Song, L.F.; Mao, Y.S. Design of control system for micro-USV based on adaptive experts plane algorithm. Shipbuild. China 2017, 58, 178–188. [Google Scholar]
- Ahmed, Y.A.; Hasegawa, K. Fuzzy reasoned waypoint controller for automatic ship guidance. IFAC-PapersOnline 2016, 49, 604–609. [Google Scholar] [CrossRef]
- Miao, Z. The application of data mining in the design of adaptive fuzzy controller for ship dynamic positioning. Ship Sci. Technol. 2016, 38, 16–18. [Google Scholar]
- Chen, H.P. Research of the ship course control system based on adaptive neural fuzzy algorithm. Ship Sci. Technol. 2017, 39, 104–106. [Google Scholar]
- Yazdanpanah, R.; Mahjoob, M.J.; Abbasi, E. Fuzzy LQR controller for heading control of an unmanned surface vessel. In Proceedings of the International Conference in Electrical and Electronics Engineering, Amman, Jordan, 16–18 April 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 73–78. [Google Scholar]
- Naeem, W.; Sutton, R.; Chudley, J. Soft computing design of a linear quadratic gaussian controller for an unmanned surface vehicle. In Proceedings of the 14th Mediterranean Conference on Control and Automation, Ancona, Italy, 28–30 June 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1–6. [Google Scholar]
- Su, Y.X.; Zhao, J. Constrained control of ship dynamic positioning system based on generalized predictive control. Ship Eng. 2015, 3, 49–52. [Google Scholar]
- Sotnikova, M. Dynamic positioning based on nonlinear MPC. IFAC Proc. Vol. 2013, 46, 37–42. [Google Scholar] [CrossRef]
- Liu, Z.L.; Geng, C.; Li, W.; Wang, T.H. Path following control of unmanned surface vessel by MPC-based method. In Proceedings of the 36th Chinese Control Conference, Dalian, China, 26–28 July 2017; Liu, T., Zhao, Q.C., Eds.; Shanghai Systems Science Press: Shanghai, China, 2017; pp. 4534–4539. [Google Scholar]
- Li, G.L.; Guo, Y.P.; Lin, L. Marine course DMPC control based on laguerre function. Comput. Dig. Eng. 2017, 45, 988–993. [Google Scholar]
- Mizuno, N.; Uchida, Y.; Okazaki, T. Quasi real-time optimal control scheme for automatic berthing. IFAC-PapersOnline 2015, 48, 305–312. [Google Scholar] [CrossRef]
- Annamalai, A.S.; Sutton, R.; Yang, C.; Culverhouse, P.; Sharma, S. Robust adaptive control of an uninhabited surface vehicle. J. Intell. Robot. Syst. 2015, 78, 319–338. [Google Scholar] [CrossRef] [Green Version]
- Xia, G.Q.; Liu, J.; Pang, C.C.; Xue, J.J. Constrained model predictive control design for dynamic positioning of a supply ship. In Proceedings of the OCEANS 2015-MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Liu, L.; Wang, D.; Peng, Z.H.; Wang, H. Predictor-based los guidance law for path following of underactuated marine surface vehicles with sideslip compensation. Ocean Eng. 2016, 124, 340–348. [Google Scholar] [CrossRef]
- Le, M.D.; Nguyen, H.N.; Nguyen, K.B. Control of large ship motions in harbor maneuvers by applying sliding mode control. IFAC Proc. Vol. 2004, 37, 309–314. [Google Scholar] [CrossRef]
- Liao, Y.L.; Chang, W.T.; Liu, T. Backstepping adaptive dynamical sliding mode control of the straight-ling trajectory tracking of underactuated unmanned surface vessels. Chin. High Technol. 2013, 23, 598–604. [Google Scholar]
- Zhao, D.; Qi, L. Sliding mode adaptive backstepping control of ship straight track control. Ship Sci. Technol. 2016, 38, 85–87. [Google Scholar]
- Wu, Y.; Yang, S.Q.; Li, W.H.; Liang, L.D.; Wang, Q. Heading control of an underactuated unmanned surface vehicle based on sliding mode and backstepping. Sci. Technol. Eng. 2018, 18, 47–53. [Google Scholar]
- Das, S. Applicability of sliding mode control in autopilot design for ship motion control. In Proceedings of the International Conference on Recent Advances and Innovations in Engineering (ICRAIE-2014), Jaipur, India, 9–11 May 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6. [Google Scholar]
- Sun, Z.; Zhang, G.; Lu, Y.; Zhang, W. Leader-follower formation control of underactuated surface vehicles based on sliding mode control and parameter estimation. ISA Trans. 2018, 72, 15. [Google Scholar] [CrossRef]
- Li, X.P.; Wu, H.S.; Ruan, M.F. Neural sliding mode control for tracking of underactuated ships based on backstepping. J. Xihua Univ. Nat. Sci. 2015, 34, 71–75. [Google Scholar]
- Yang, Z.; Liu, F.M.; Wang, Y. Path following of underactuated surface vessels based on neural sliding mode. Ship Build. China 2015, 56, 45–55. [Google Scholar]
- Han, J.Q. From PID technique to active disturbance rejection control technique. Control Eng. China 2002, 9, 13–18. [Google Scholar]
- Gao, Z.Q. Scaling and bandwidth-parameterization based controller tuning. Art Sci. Feedback Control 2003, 6, 4989–4996. [Google Scholar]
- Bian, X.Q.; Fu, M.Y.; Wang, Y.H. Ship Dynamic Positioning; Science Press: Beijing, China, 2011. [Google Scholar]
- Xiong, H.J.; Liu, J.Y.; Chen, Y.P. Research and simulation of ADRC on ships dynamic positioning control under strong disturbance. J. Wuhan Univ. Technol. 2015, 37, 52–57. [Google Scholar]
- Piao, Z.J.; Guo, C. Simulation for pod-driven ship course ADRC steering. In Asian Simulation Conference; Zhang, L., Song, X., Wu, Y., Eds.; Springer: Singapore, 2016; pp. 77–85. [Google Scholar]
- Piao, Z.J.; Chen, G. RBF-ADRC based intelligent course control for a twin podded ship. In Chinese Intelligent Automation Conference; Deng, Z., Ed.; Springer: Singapore, 2017; pp. 441–448. [Google Scholar]
- Liu, W.J.; Mei, S.Q.; Yu, Z.F. Straight line tracking control of ships based on ADRC. J. Shandong Univ. Eng. Sci. 2010, 40, 48–53. [Google Scholar]
- Qiu, F.; Li, W.; Ning, J. Integral sliding-mode controller of ship tracking based on linear active disturbance rejection control. J. Shanghai Marit. Univ. 2017, 38, 12–17. [Google Scholar]
- Guo, C.; Wang, D.M.; Li, Y.Z. Modeling and simulation for super large twin-propeller twin-rudder ship and its course ADRC. In Theory, Methodology, Tools and Applications for Modeling and Simulation of Complex Systems; Zhang, L., Song, X., Wu, Y., Eds.; Springer: Singapore, 2016; pp. 89–99. [Google Scholar]
- Li, R.H.; Li, T.S.; Li, Q. Application of active disturbance rejection control in ship course and track control. In Proceedings of the 30th Chinese Control Conference, Yantai, China, 22–24 July 2011; Zhang, J.F., Zhao, Q.C., Eds.; IEEE: Piscataway, NJ, USA, 2011; pp. 6310–6314. [Google Scholar]
- Qin, C.Y.; Li, W.; Ning, J.; Sun, J. Active disturbance rejection control for ship trajectory tracking based on nonsingular terminal sliding mode. J. Shanghai Marit. Univ. 2016, 37, 13–17. [Google Scholar]
- Yang, F.F.; Guo, C.; Jiang, Y.B. RBF based integrated ADRC controller for a ship dynamic positioning system. In Chinese Intelligent Automation Conference; Deng, Z., Ed.; Springer: Singapore, 2017; pp. 673–680. [Google Scholar]
- Hunt, K.J.; Sbarbaro, D.; Żbikowski, R.; Gawthrop, P.J. Neural networks for control systems—A survey. Automatica 1992, 28, 1083–1112. [Google Scholar] [CrossRef]
- Steinbrunn, M.; Moerkotte, G.; Kemper, A. Heuristic and randomized optimization for the join ordering problem. Int. J. Very Large Data Bases 1997, 6, 191–208. [Google Scholar] [CrossRef]
- Choi, C.; Lee, J.J. Chaotic local search algorithm. Artif. Life Robot. 1998, 2, 41–47. [Google Scholar] [CrossRef]
- Vapnik, V.; Lerner, A.Y. Recognition of patterns with help of generalized portraits. Avtomat. Telemekh 1963, 24, 774–780. [Google Scholar]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- Glover, F. Tabu search—Part I. ORSA J. Comput. 1989, 1, 190–206. [Google Scholar] [CrossRef]
- Marco, D.; de Montes, O.M.A.; Sabrina, O.; Thomas, S. Ant colony optimization. IEEE Comput. Intell. Mag. 2007, 1, 28–39. [Google Scholar]
- Kennedy, J. Particle swarm optimization. Encycl. Mach. Learn. 2010, 1, 760–766. [Google Scholar]
- Passino, K.M. Biomimicry of bacterial foraging for distributed optimization and control. IEEE Control Syst. Mag. 2002, 22, 52–67. [Google Scholar]
- Li, X.L. A New Intelligent Optimization Method-Artificial Fish Swarm Algorithms. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2003. [Google Scholar]
- Edmonds, J. Matroids and the greedy algorithm. Math. Program. 1971, 1, 127–136. [Google Scholar] [CrossRef]
- Karaboga, D. Artificial bee colony algorithm. Scholarpedia 2010, 5, 6915. [Google Scholar] [CrossRef]
- Pinto, P.; Runkler, T.A.; Sousa, J.M. Wasp Swarm Optimization of Logistic Systems. In Adaptive and Natural Computing Algorithms; Ribeiro, B., Albrecht, R.F., Dobnikar, A., Pearson, D.W., Steele, N.C., Eds.; Springer: Vienna, Austria, 2005; pp. 264–267. [Google Scholar]
- Mucherino, A.; Seref, O. Monkey search: A novel metaheuristic search for global optimization. In AIP Conference Proceedings; AIP: Melville, NY, USA, 2007; pp. 162–173. [Google Scholar]
- Lu, X.; Zhou, Y. A novel global convergence algorithm: Bee collecting pollen algorithm. In International Conference on Intelligent Computing; Huang, D.S., Wunsch, D.C., Levine, D.S., Jo, K.H., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 518–525. [Google Scholar]
- Yang, X.S.; Deb, S. Engineering optimisation by cuckoo search. Int. J. Math. Model. Numer. Optim. 2010, 1, 330–343. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Shiqin, Y.; Jianjun, J.; Guangxing, Y. A dolphin partner optimization. In Proceedings of the 2009 WRI Global Congress on Intelligent Systems, Xiamen, China, 19–21 May 2009; Zhou, S.M., Wang, W.W., Eds.; IEEE: Piscataway, NJ, USA, 2009; pp. 124–128. [Google Scholar]
- Yang, X.S. A new metaheuristic bat-inspired algorithm. Comput. Knowl. Technol. 2010, 284, 65–74. [Google Scholar]
- Yang, X.S. Firefly algorithm, stochastic test functions and design optimisation. Int. J. Bio-Inspir. Comput. 2010, 2, 78–84. [Google Scholar] [CrossRef]
- Pan, W.T. A new fruit fly optimization algorithm: Taking the financial distress model as an example. Knowl.-Based Syst. 2012, 26, 69–74. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Alavi, A.H. Krill herd: A new bio-inspired optimization algorithm. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 4831–4845. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Bansal, J.C.; Sharma, H.; Jadon, S.S.; Clerc, M. Spider monkey optimization algorithm for numerical optimization. Memet. Comput. 2014, 6, 31–47. [Google Scholar] [CrossRef]
- Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Yazdani, M.; Jolai, F. Lion optimization algorithm (LOA): A nature-inspired metaheuristic algorithm. J. Comput. Des. Eng. 2016, 3, 24–36. [Google Scholar] [CrossRef] [Green Version]
- Jiang, X.Y.; Li, S. Bas: Beetle antennae search algorithm for optimization problems. arXiv 2017, arXiv:1710.10724. [Google Scholar] [CrossRef]
- Wang, Y.Y.; Chai, S.H.; Khan, F.; Nguyen, H.D. Unscented kalman filter trained neural networks based rudder roll stabilization system for ship in waves. Appl. Ocean Res. 2017, 68, 26–38. [Google Scholar] [CrossRef]
- Wang, R.Q.; Zhao, Y.L.; Miao, K.Y. Application of neural network minimum parameter learning algorithm in ship’s heading tracking control. In Proceedings of the International Symposium on Computational Intelligence and Design, Hangzhou, China, 10–11 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 135–139. [Google Scholar]
- Ge, Y.; Qin, M.J.; Niu, Q.T. Prediction of ship motion attitude based on bp network. In Proceedings of the 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 20–30 May 2017; Yang, G.H., Yang, D., Eds.; IEEE: Piscataway, NJ, USA, 2017; pp. 1596–1600. [Google Scholar]
- Zhang, Q.; Jiang, N.; Hu, Y.; Pan, D. Design of course-keeping controller for a ship based on backstepping and neural networks. Int. J. E-Navig. Marit. Econ. 2017, 7, 34–41. [Google Scholar] [CrossRef]
- Zhang, L.J.; Jia, H.M.; Qi, X. NNFFC-adaptive output feedback trajectory tracking control for a surface ship at high speed. Ocean Eng. 2011, 38, 1430–1438. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Sun, J.C.; Wang, N.; Meng, J.E. Extreme learning control of surface vehicles with unknown dynamics and disturbances. Neurocomputing 2015, 167, 535–542. [Google Scholar] [CrossRef]
- Wang, N.; Sun, J.C.; Er, M.J.; Liu, Y.C. A novel extreme learning control framework of unmanned surface vehicles. IEEE Trans. Cybern. 2015, 46, 1106. [Google Scholar] [CrossRef]
- Wang, X.G.; Jian, Z.Z. Identification of ship manoeuvring response model based on fruit fly optimization algorithm. J. Dalian Marit. Univ. 2012, 38, 1–4. [Google Scholar]
- Tomera, M. Swarm intelligence applied to identification of nonlinear ship steering model. In Proceedings of the IEEE International Conference on Cybernetics, Gdynia, Poland, 24–26 June 2015; Piotr, J., Ngoc, T.N., Hong, T.P., Ireneusz, C., Eds.; IEEE: Piscataway, NJ, USA, 2015; pp. 133–139. [Google Scholar]
- Luo, W.L.; Cai, W.L. Modeling of ship manoeuvring motion using optimized support vector machines. In Proceedings of the Fifth International Conference on Intelligent Control and Information Processing, Dalian, China, 18–20 August 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 476–478. [Google Scholar]
- Xu, H.T.; Soares, C.G. Vector field path following for surface marine vessel and parameter identification based on LS-SVM. Ocean Eng. 2016, 113, 151–161. [Google Scholar] [CrossRef]
- Luo, W.M.; Ren, J.S. On the identification of coupled pitch and heave motions using support vector machine. In Proceedings of the 28th Chinese Control and Decision Conference, Yinchuan, China, 28–30 May 2016; Yang, G.H., Gao, Y., Zhang, H., Eds.; IEEE: Piscataway, NJ, USA, 2016; pp. 3316–3321. [Google Scholar]
- Shin, J.; Dong, J.K.; Lee, Y.I. Adaptive path following control for an unmanned surface vessel using an identified dynamic model. IEEE/ASME Trans. Mech. 2017, 22, 1143–1153. [Google Scholar] [CrossRef]
- Zhu, M.; Hahn, A.; Wen, Y.Q. Identification-based controller design using cloud model for course-keeping of ships in waves. Eng. App. Artif. Intell. 2018, 75, 22–35. [Google Scholar] [CrossRef]
- Seghir, M.M. Safe ship’s control in a fuzzy environment using a genetic algorithm. Solid State Phenom. 2011, 180, 70–75. [Google Scholar] [CrossRef]
- Chen, J.W.; Zhu, H.; Lei, Z.; Sun, Y. Research on fuzzy control of path tracking for underwater vehicle based on genetic algorithm optimization. Ocean Eng. 2018, 156, 217–223. [Google Scholar] [CrossRef]
- Kosmas, O.T.; Vlachos, D.S. Simulated annealing for optimal ship routing. Comput. Oper. Res. 2012, 39, 576–581. [Google Scholar] [CrossRef] [Green Version]
- Becker, M.; Tierney, K. A hybrid reactive tabu search for liner shipping fleet repositioning. In 6th International Conference on Computational Logistics; Francesco, C., Stefan, V., Negenborn, R.R., Eds.; Springer: Delft, The Netherlands, 2015; pp. 123–138. [Google Scholar]
- Kang, J.G.; Kim, Y.D. Stowage planning in maritime container transportation. J. Oper. Res. Soc. 2002, 53, 415–426. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, S.; Liao, Q.; Yang, F. A method for ship compartment layout design based on gravitational search algorithm. J. Shanghai Jiaotong Univ. 2016, 50, 131–139. [Google Scholar]
- Chen, P.; Shi, G.Y.; Liu, S.; Zhang, Y.Q. Decision support based on artificial fish swarm for ship collision avoidance from AIS data. In Proceedings of the 2018 International Conference on Machine Learning and Cybernetics, Chengdu, China, 15–18 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 31–36. [Google Scholar]
- Jiang, X.Y.; Li, S. Beetle antennae search without parameter tuning (BAS-WPT) for multi-objective optimization. arXiv 2017, arXiv:1711.02395. [Google Scholar]
- Deng, W.; Xu, J.J.; Zhao, H.M. An improved ant colony optimization algorithm based on hybrid strategies for scheduling problem. IEEE Access 2019, 7, 20281–20292. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. A novel random walk grey wolf optimizer. Swarm Evol. Comput. 2019, 44, 101–112. [Google Scholar] [CrossRef]
- Sharma, A.; Sharma, A.; Panigrahi, B.K.; Kiran, D.; Kumar, R. Ageist spider monkey optimization algorithm. Swarm Evol. Comput. 2016, 28, 58–77. [Google Scholar] [CrossRef]
- Wang, J.; Chen, H. BSAS: Beetle swarm antennae search algorithm for optimization problems. arXiv 2018, arXiv:1807.10470. [Google Scholar]
- Wu, D.; Ren, F.; Zhang, W. An energy optimal thrust allocation method for the marine dynamic positioning system based on adaptive hybrid artificial bee colony algorithm. Ocean Eng. 2016, 118, 216–226. [Google Scholar] [CrossRef]
- Deb, S.; Deb, S.; Gandomi, A.H.; Zhang, Z.; Alavi, A.H. Chaotic cuckoo search. Soft Comput. 2016, 20, 3349–3362. [Google Scholar]
- Li, X.; Yin, M. Modified cuckoo search algorithm with self adaptive parameter method. Inf. Sci. 2015, 298, 80–97. [Google Scholar] [CrossRef]
- Wang, G.G.; Guo, L.; Gandomi, A.H.; Hao, G.S.; Wang, H. Chaotic krill herd algorithm. Inf. Sci. 2014, 274, 17–34. [Google Scholar] [CrossRef]
- Adarsh, B.R.; Raghunathan, T.; Jayabarathi, T.; Yang, X.S. Economic dispatch using chaotic bat algorithm. Energy 2016, 96, 666–675. [Google Scholar] [CrossRef]
- Kaur, G.; Arora, S. Chaotic whale optimization algorithm. J. Comput. Des. Eng. 2018, 5, 275–284. [Google Scholar] [CrossRef]
- Aljarah, I.; Faris, H.; Mirjalili, S. Optimizing connection weights in neural networks using the whale optimization algorithm. Soft Comput. 2018, 22, 1–15. [Google Scholar] [CrossRef]
- Mafarja, M.M.; Mirjalili, S. Hybrid whale optimization algorithm with simulated annealing for feature selection. Neurocomputing 2017, 260, 302–312. [Google Scholar] [CrossRef]
- Wang, G.G.; Gandomi, A.H.; Yang, X.S.; Alavi, A.H. A new hybrid method based on krill herd and cuckoo search for global optimisation tasks. Int. J. Bio-Inspir. Comput. 2016, 8, 286. [Google Scholar] [CrossRef]
- Chansombat, S.; Musikapun, P.; Pongcharoen, P.; Hicks, C. A hybrid discrete bat algorithm with krill herd-based advanced planning and scheduling tool for the capital goods industry. Int. J. Prod. Res. 2018, 1, 1–22. [Google Scholar] [CrossRef]
- Lin, M.J.; Li, Q.H. A hybrid optimization method of beetle antennae search algorithm and particle swarm optimization. DEStech Trans. Eng. Technol. Res. 2018, 1, 396–401. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Yang, L.; Liu, Q. Beetle Swarm Optimization Algorithm: Theory and Application. arXiv 2018, arXiv:1808.00206. [Google Scholar]
- Tsai, S.H.; Chen, Y.W. A novel fuzzy identification method based on ant colony optimization algorithm. IEEE Access 2016, 4, 3747–3756. [Google Scholar] [CrossRef] [Green Version]
- Raju, M.; Saikia, L.C.; Sinha, N. Automatic generation control of a multi-area system using ant lion optimizer algorithm based PID plus second order derivative controller. Int. J. Electr. Power Energy Syst. 2016, 80, 52–63. [Google Scholar] [CrossRef]
- Martinsen, A.B.; Lekkas, A.M. Curved path following with deep reinforcement learning: Results from three vessel models. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; Payne, J., Flynn, J., Eds.; IEEE: Piscataway, NJ, USA, 2018; pp. 1–8. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A.A.; Veness, J.; Bellemare, M.G.; Graves, A.; Riedmiller, M.; Fidjeland, A.K.; Ostrovski, G.; et al. Human-level control through deep reinforcement learning. Nature 2015, 518, 529–533. [Google Scholar] [CrossRef]
- Silver, D.; Huang, A.; Maddison, C.J.; Guez, A.; Sifre, L.; Van Den Driessche, G.; Schrittwieser, J.; Antonoglou, I.; Panneershelvam, V.; Lanctot, M.; et al. Mastering the game of go with deep neural networks and tree search. Nature 2016, 529, 484. [Google Scholar] [CrossRef]
- Carlucho, I.; De Paula, M.; Wang, S.; Petillot, Y.; Acosta, G.G. Adaptive low-level control of autonomous underwater vehicles using deep reinforcement learning. Robot. Auton. Syst. 2018, 107, 71–86. [Google Scholar] [CrossRef] [Green Version]
- Cui, R.; Yang, C.; Li, Y.; Sharma, S. Neural network based reinforcement learning control of autonomous underwater vehicles with control input saturation. In Proceedings of the 2014 UKACC International Conference on Control (CONTROL), Loughborough, UK, 9–11 July 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 50–55. [Google Scholar]
- Cui, R.; Yang, C.; Li, Y.; Sharma, S. Adaptive neural network control of AUVs with control input nonlinearities using reinforcement learning. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1019–1029. [Google Scholar] [CrossRef] [Green Version]
- Yu, R.; Shi, Z.; Huang, C.; Li, T.; Ma, Q. Deep reinforcement learning based optimal trajectory tracking control of autonomous underwater vehicle. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; Liu, T., Zhao, Q.C., Eds.; IEEE: Piscataway, NJ, USA, 2017; pp. 4958–4965. [Google Scholar]
- Wu, H.; Song, S.; You, K.; Wu, C. Depth control of model-free auvs via reinforcement learning. IEEE Trans. Syst. Man Cybern. Syst. 2018, 1, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Rejaili, R.P.A.; Figueiredo, J.M.P. Deep reinforcement learning algorithms for ship navigation in restricted waters. Mecatrone 2018, 3, 1–10. [Google Scholar]
- Yoo, B.; Kim, J. Path optimization for marine vehicles in ocean currents using reinforcement learning. J. Mar. Sci. Technol. 2016, 21, 334–343. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhang, W. Concise deep reinforcement learning obstacle avoidance for underactuated unmanned marine vessels. Neurocomputing 2018, 272, 63–73. [Google Scholar] [CrossRef]
- United States Department of Defense. Unmanned Systems Integrated Roadmap 2017–2042; Technical Report; United States Department of Defense: Arlington, VA, USA, 2018.
- Abed-alguni, B.H. Bat Q-learning algorithm. Jordan J. Comput. Inf. Technol. 2017, 3, 56–77. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Ship | Content |
|---|---|---|
| Degree one | Ship with automated processes and decision support. | Seafarers are on board to operate and control shipboard systems and functions. Some operations may be automated and at times be unsupervised but with seafarers on board ready to take control. |
| Degree two | Remotely controlled ship with seafarers on board. | The ship is controlled and operated from another location. Seafarers are available on board to take control and to operate the shipboard systems and functions. |
| Degree three | Remotely controlled ship without seafarers on board. | The ship is controlled and operated from another location. There are no seafarers on board. |
| Degree four | Fully autonomous ship | The operating system of the ship is able to make decisions and determine actions by itself. |
| Model Types | Specific Types | Formulas |
|---|---|---|
| Hydrodynamic model | Whole ship model (Abkowitz model [46]) | |
| Modular type model (MMG model [47]) | ||
| Responsive model | Such as Nomoto model [48] | |
| Other models | Such as Fossen model [42] |
| Types | Control Object | Propulsion and Power System | Control Variables |
|---|---|---|---|
| (1) Ship speed control | Speed | Engine and propeller | Propeller rotation speed(RPS/RPM) |
| (2) Course control | Course | Rudder | Rudder angle(degree/radian) |
| (3) Stabilization | Course, speed and path | Engine, propeller and rudder | Propeller rotation speed and rudder angle |
| (4) Path-following | Path | Engine, propeller and rudder | Propeller rotation speed and rudder angle |
| (5) Trajectory tracking | Trajectory | Engine, propeller and rudder | Propeller rotation speed, rudder angle and time |
| (6) Path planning, obstacle avoidance and guidance | Path | Engine, propeller and rudder | Propeller rotation speed and rudder angle |
| (7) Automatic docking | Course, speed and path | Engine, bow/stern thruster and rudder | Bow/stern thruster speed |
| (8) Multi-ships formation cooperative control | Course, speed and path | Engine, propeller and rudder of ships, ship-to-ship communication systems | Propeller rotation speed and rudder angle of ships |
| Number | Algorithm | Number | Algorithm |
|---|---|---|---|
| (1) | Neural Network(NN) [159] | (2) | Simulated Annealing(SA) [160] |
| (3) | Chaos theory [161] | (4) | Support Vector Machine(SVM) [162] |
| (5) | Genetic Algorithm(GA) [163] | (6) | Tabu Search(TS) [164] |
| (7) | Ant Colony Optimization(ACO) [165] | (8) | Particle Swarm Optimization(PSO) [166] |
| (9) | Bacterial Foraging Algorithm(BFA) [167] | (10) | Artificial Fish Swarm Algorithm(AFSA) [168] |
| (11) | Greedy Algorithm [169] | (12) | Artificial Bee Colony Algorithm(ABC) [170] |
| (13) | Wasp Swarm Algorithm(WSA) [171] | (14) | Monkey Search(MS) [172] |
| (15) | Bee Collecting Pollen Algorithm(BCPA) [173] | (16) | Cuckoo Search(CS) [174] |
| (17) | Gravitational Search Algorithm(GSA) [175] | (18) | Dolphin Partner Optimization(DPO) [176] |
| (19) | Bat Algorithm(BA) [177] | (20) | Firefly Algorithm(FA) [178] |
| (21) | Fruit Fly Optimization Algorithm(FFOA) [179] | (22) | Krill Herd(KH) [180] |
| (23) | Grey Wolf Optimizer(GWO) [181] | (24) | Spider Monkey Optimization(SMO) [182] |
| (25) | Ant Lion Optimization Algorithm(ALOA) [183] | (26) | Whale Optimization Algorithm(WOA) [184] |
| (27) | Lion Optimization Algorithm(LOA) [185] | (28) | Beetle Antenna Search(BAS) [186] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Wu, Q.; Liu, J.; Li, S.; Negenborn, R.R. State-of-the-Art Research on Motion Control of Maritime Autonomous Surface Ships. J. Mar. Sci. Eng. 2019, 7, 438. https://doi.org/10.3390/jmse7120438
Wang L, Wu Q, Liu J, Li S, Negenborn RR. State-of-the-Art Research on Motion Control of Maritime Autonomous Surface Ships. Journal of Marine Science and Engineering. 2019; 7(12):438. https://doi.org/10.3390/jmse7120438
Chicago/Turabian StyleWang, Le, Qing Wu, Jialun Liu, Shijie Li, and Rudy R. Negenborn. 2019. "State-of-the-Art Research on Motion Control of Maritime Autonomous Surface Ships" Journal of Marine Science and Engineering 7, no. 12: 438. https://doi.org/10.3390/jmse7120438
APA StyleWang, L., Wu, Q., Liu, J., Li, S., & Negenborn, R. R. (2019). State-of-the-Art Research on Motion Control of Maritime Autonomous Surface Ships. Journal of Marine Science and Engineering, 7(12), 438. https://doi.org/10.3390/jmse7120438