Automatic Shoreline Detection from Eight-Band VHR Satellite Imagery





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. State of the Art of Instant Shoreline Survey
- Photogrammetry/videography from airplane or UAV: In the first case, this is a matter of using the well-known techniques of photogrammetry from single acquisitions of aerial images that are currently almost all digital images; digital cameras can easily acquire films that can be treated with classical photogrammetric algorithms or with new approaches such as structure from motion (SFM) [11,12].
- Terrestrial video systems: These are fixed camera systems which acquire at fixed time-intervals and which are composed of several cameras distributed along the coast with acquisition angles of up to 180 degrees. This technique produces oblique images that must be orthorectified [13].
- Earth and satellite geomatic surveys: These are the classic surveys with instruments such as GPS/GNSS and total stations, levels that have a remarkable accuracy but can detect a limited number of points at different times.
- Terrestrial and aerial lidar survey that can reconstruct both the surfaces of water and ground [12] or penetrate shallow water.
- Remote sensing from satellite: It should be noted that with the development of remote sensing, shoreline detection is mainly achieved by image processing [14]. The availability of multispectral satellite images at very high resolution (VHR) allows, in fact, acquisition in a short time and simultaneously of long stretches of coast. The geometric accuracies of submetric to decimetric order are absolutely compatible with the specific application and the availability of different bands allows semi-automatic or automatic approaches [15,16,17] such as those proposed in this paper.
3. Materials and Methods
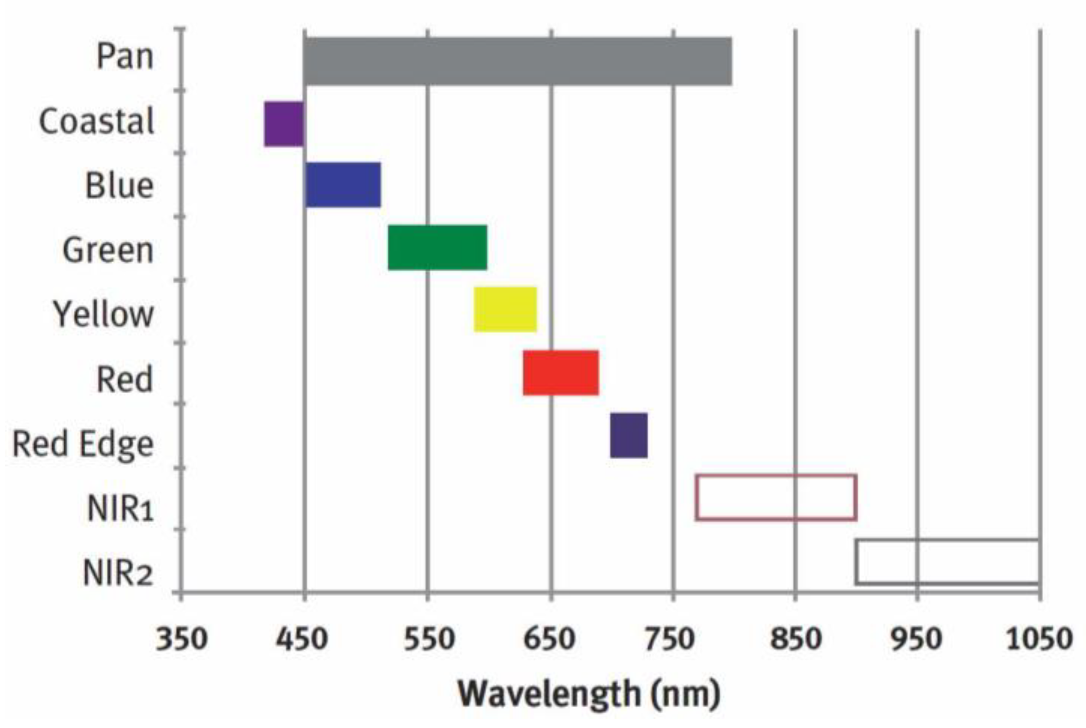
3.1. The WorldView-2 Satellite
3.2. Test Site
4. Experimentation and Results
4.1. Analysis of Individual Bands and Band Combinations
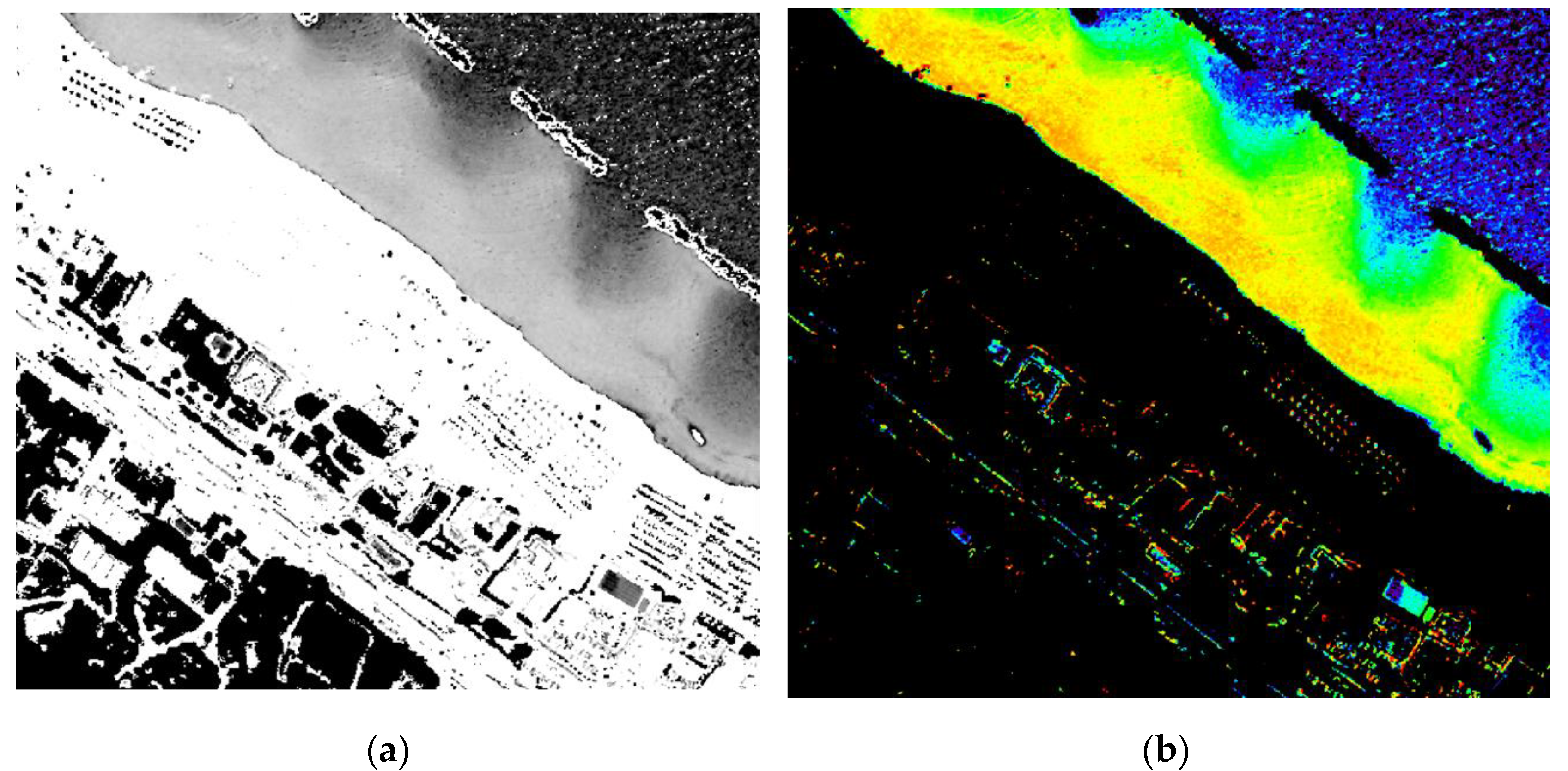
4.2. Automatization of Water and Vegetation Detection
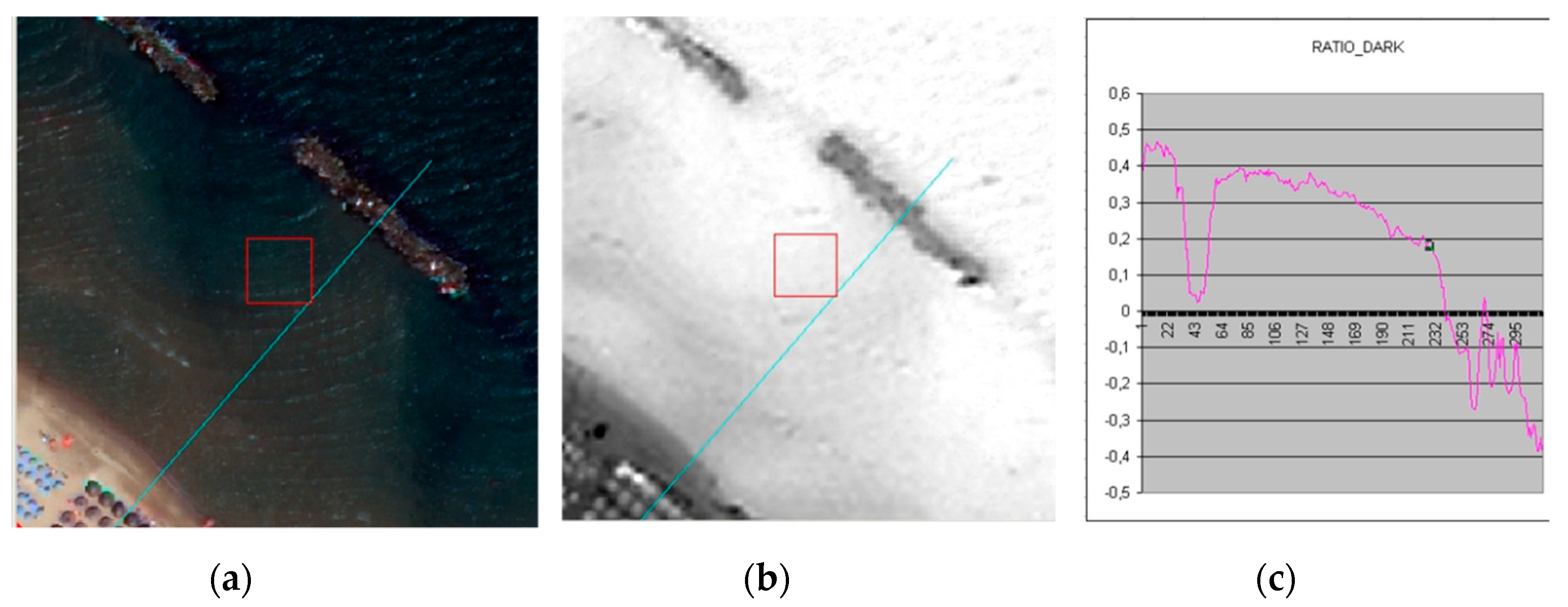
4.3. The Coastal Blue Band and the Relative Depth Algorithm
4.4. Supervised Multispectral Classification
5. Conclusions and Further Developments
Author Contributions
Funding
Conflicts of Interest
References
- Dolan, R.; Hayden, B.P.; May, P.; May, S. The reliability of shoreline change measurements from aerial photographs. Shore Beach 1980, 48, 22–29. [Google Scholar]
- Cervino, R.; Ivaldi, R.; Surace, L. Il ruolo dell’Istituto idrografico della Marina nel monitoraggio costiero. In Proceedings of the 3rd Symposium Il Monitoraggio Costiero Mediterraneo: Problematiche e Tecniche di Misura, Livorno, Italy, 15–17 June 2010. [Google Scholar]
- Boak, E.H.; Turner, I.L. Shoreline definition and detection: A review. J. Coast. Res. 2005, 21, 688–703. [Google Scholar] [CrossRef] [Green Version]
- Aguilar, F.J.; Fernández, I.; Pérez, J.L.; López, A.; Aguilar, M.A.; Mozas, A.; Cardenal, J. Preliminary results on high accuracy estimation of shoreline change rate based on coastal elevation models. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 33, 986–991. [Google Scholar]
- Klein, M.; Lichter, M. Monitoring changes in shoreline position adjacent to the Hadera power station, Israel. Appl. Geogr. 2006, 26, 210–226. [Google Scholar] [CrossRef]
- Progetto Preliminare Della Costa Teatina—Fenomeni Erosivi Della Fascia Costiera. Available online: http://www.provincia.chieti.it/flex/cm/pages/ServeAttachment.php/L/IT/D/2%252F4%252F4%252FD.d367c153fd7837fd72ca/P/BLOB%3AID%3D3926/E/pdf (accessed on 28 October 2019).
- MATTM-Regioni. Linee Guida per la Difesa Della Costa dai Fenomeni di Erosione e Dagli Effetti dei Cambiamenti Climatici. Versione 2018—Documento Elaborato dal Tavolo Nazionale sull’Erosione Costiera; MATTM-Regioni con il Coordinamento Tecnico di ISPRA: Rome, Italy, 2018; 305p. [Google Scholar]
- Klemas, V. Airborne Remote Sensing of Coastal Features and Processes: An Overview. J. Coast. Res. 2013, 29, 239–255. [Google Scholar] [CrossRef]
- Costantino, D.; Angelini, M.G. Thermal monitoring using an ASTER image. J. Appl. Remote Sens. 2016, 10, 46031. [Google Scholar] [CrossRef]
- Tarig, A. New Methods for Positional Quality Assessment and Change Analysis of Shoreline Features. Ph.D. Thesis, School of the Ohio State University, Columbus, OH, USA, 2003. [Google Scholar]
- Ullman, S. The Interpretation of Structure from Motion, The Royal Society. University of Southampton. 1979. Available online: https://www.jstor.org/stable/77505 (accessed on 12 December 2019).
- Troisi, S.; Baiocchi, V.; Del Pizzo, S.; Giannone, F. A prompt methodology to georeference complex hypogea environments. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 639–644. [Google Scholar] [CrossRef] [Green Version]
- Pugliano, G.; Robustelli, U.; Di Luccio, D.; Mucerino, L.; Benassai, G.; Montella, R. Statistical Deviations in Shoreline Detection Obtained with Direct and Remote Observations. J. Mar. Sci. Eng. 2019, 7, 137. [Google Scholar] [CrossRef] [Green Version]
- Palazzo, F.; Latini, D.; Baiocchi, V.; Del Frate, F.; Giannone, F.; Dominici, D.; Remondiere, S. An application of COSMO-Sky Med to coastal erosion studies. Eur. J. Remote Sens. 2012, 45, 361–370. [Google Scholar] [CrossRef] [Green Version]
- Toure, S.; Diop, O.; Kpalma, K.; Maiga, A.S. Shoreline Detection using Optical Remote Sensing: A Review. Isprs Int. J. Geo. Inf. 2019, 8, 75. [Google Scholar] [CrossRef] [Green Version]
- Dai, C.; Howat, I.; Larour, E.; Husby, E. Coastline extraction from repeat high resolution satellite imagery. Remote Sens. Environ. 2019, 229, 260–270. [Google Scholar] [CrossRef]
- Dominici, D.; Zollini, S.; Alicandro, M.; Della Torre, F.; Buscema, P.M.; Baiocchi, V. High Resolution Satellite Images for Instantaneous Shoreline Extraction Using New Enhancement Algorithms. Geosciences 2019, 9, 123. [Google Scholar] [CrossRef] [Green Version]
- WorldView-2 Satellite Sensor. Available online: https://www.satimagingcorp.com/satellite-sensors/worldview-2/ (accessed on 12 December 2019).
- Available online: https://www.harrisgeospatial.com/Support/Maintenance-detail/ArtMID/13350/ArticleID/23403/Whats-New-ENVI174-55 (accessed on 12 December 2019).
- Maglione, P.; Parente, C.; Vallario, A. Coastline extraction using high resolution WorldView-2 satellite imagery. Eur. J. Remote Sens. 2014, 47, 685–699. [Google Scholar] [CrossRef]
- Baiocchi, V.; Bianchi, A.; Maddaluno, C.; Vidale, M. Pansharpening techniques to detect mass monument damaging in Iraq. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-5/W1, 121–126. [Google Scholar] [CrossRef] [Green Version]
- Parente, C.; Pepe, M. Influence of the weights in IHS and Brovey methods for pan-sharpening WorldView-3 satellite images. Int. J. Eng. Technol. 2017, 6, 71. [Google Scholar] [CrossRef] [Green Version]
- Vivone, G.; Alparone, L.; Chanussot, J.; Dalla Mura, M.; Garzelli, G.; Licciardi, A.; Restaino, R.; Wald, L. A critical comparison among pansharpening algorithms. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2565–2586. [Google Scholar] [CrossRef]
- Maurer, T. How to pan-sharpen images using the gram-schmidt pan-sharpen metho—A recipe. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W1, 239–244. [Google Scholar] [CrossRef] [Green Version]
- Kruse, F.A.; Lefkoff, A.B.; Boardman, J.B.; Heidebrecht, K.B.; Shapiro, A.T.; Barloon, P.J.; Goetz, A.F.H. The Spectral Image Processing System (SIPS)—Interactive Visualization and Analysis of Imaging spectrometer Data. Remote Sens. Environ. 1993, 44, 145–163. [Google Scholar] [CrossRef]
- Ferrier, G. Application of Imaging Spectrometer Data in Identifying Environmental Pollution Caused by Mining at Rodaquilar, Spain. Remote Sens. Environ. 1999, 68, 125–137. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 1. [Google Scholar] [CrossRef]


















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alicandro, M.; Baiocchi, V.; Brigante, R.; Radicioni, F. Automatic Shoreline Detection from Eight-Band VHR Satellite Imagery. J. Mar. Sci. Eng. 2019, 7, 459. https://doi.org/10.3390/jmse7120459
Alicandro M, Baiocchi V, Brigante R, Radicioni F. Automatic Shoreline Detection from Eight-Band VHR Satellite Imagery. Journal of Marine Science and Engineering. 2019; 7(12):459. https://doi.org/10.3390/jmse7120459
Chicago/Turabian StyleAlicandro, Maria, Valerio Baiocchi, Raffaella Brigante, and Fabio Radicioni. 2019. "Automatic Shoreline Detection from Eight-Band VHR Satellite Imagery" Journal of Marine Science and Engineering 7, no. 12: 459. https://doi.org/10.3390/jmse7120459
APA StyleAlicandro, M., Baiocchi, V., Brigante, R., & Radicioni, F. (2019). Automatic Shoreline Detection from Eight-Band VHR Satellite Imagery. Journal of Marine Science and Engineering, 7(12), 459. https://doi.org/10.3390/jmse7120459