Finite Element Analysis and Parametric Study of Spudcan Footing Geometries Penetrating Clay Near Existing Footprints

Abstract
:1. Introduction
1.1. Background
1.2. Previous Work
1.3. Motivation of Present Study
2. Materials and Methods
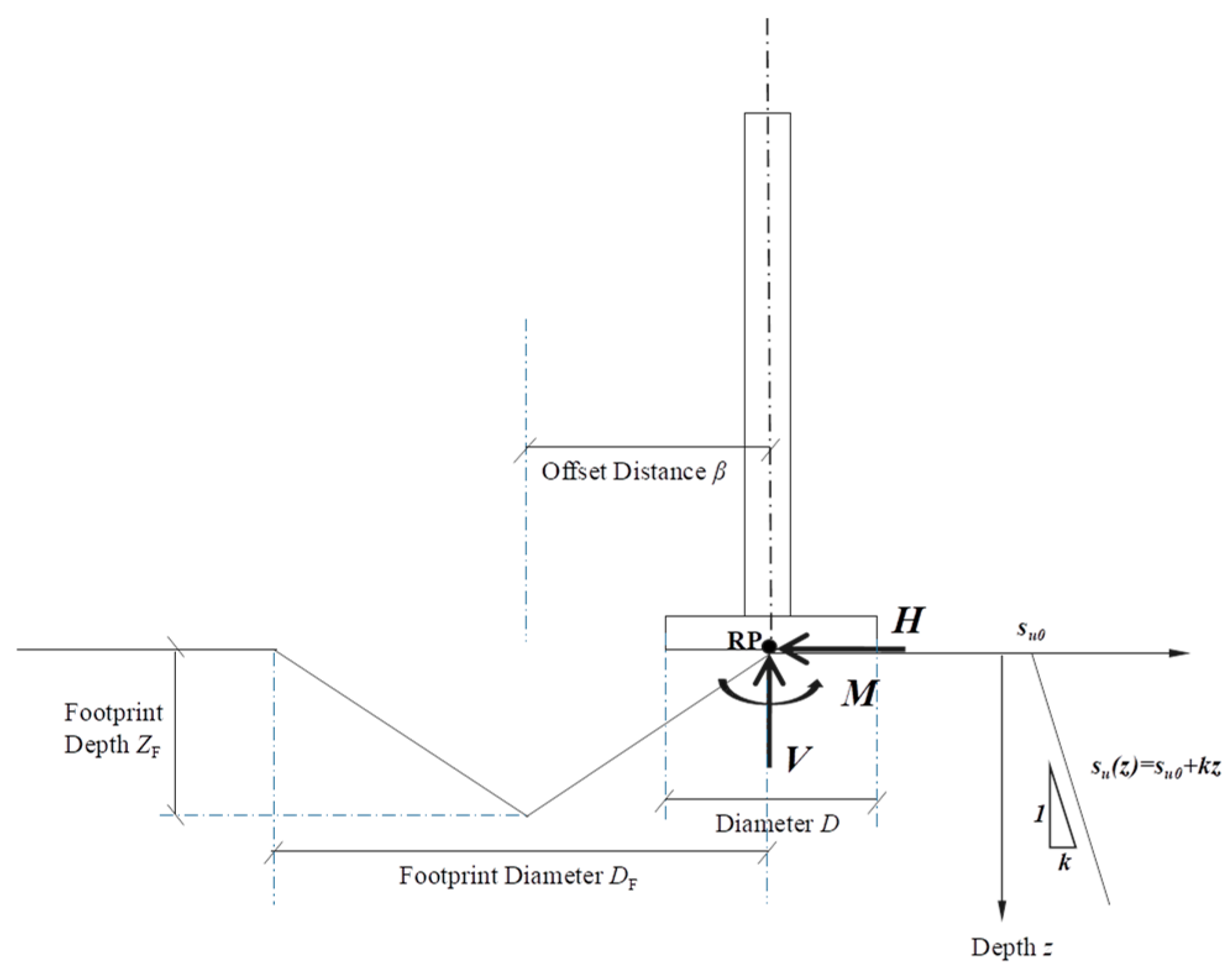
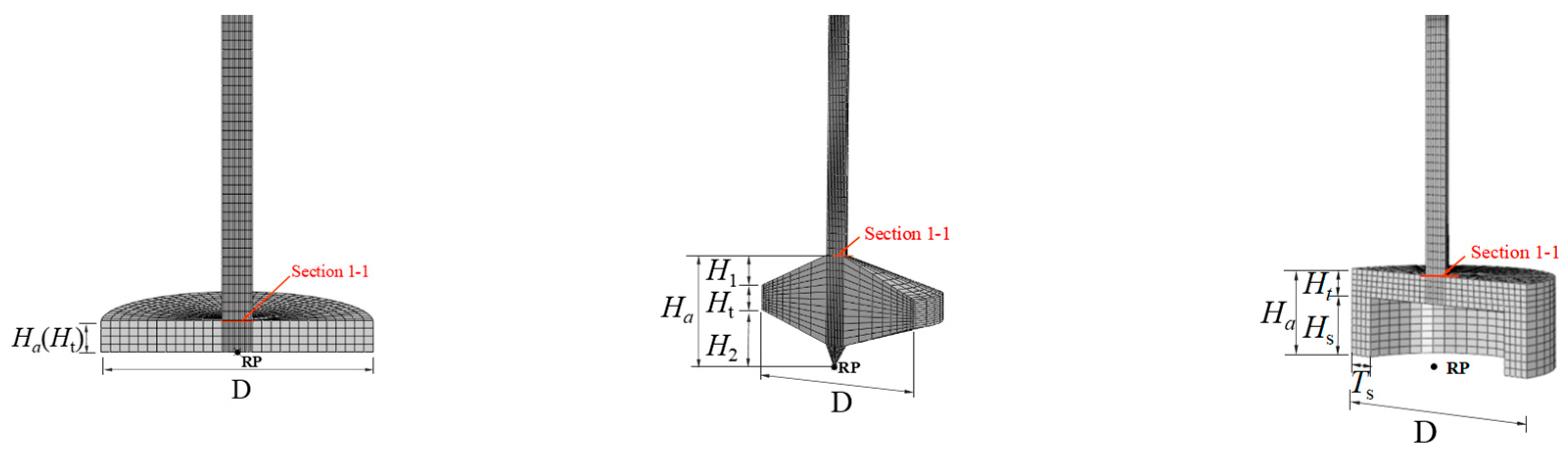
2.1. Modeling of Footings
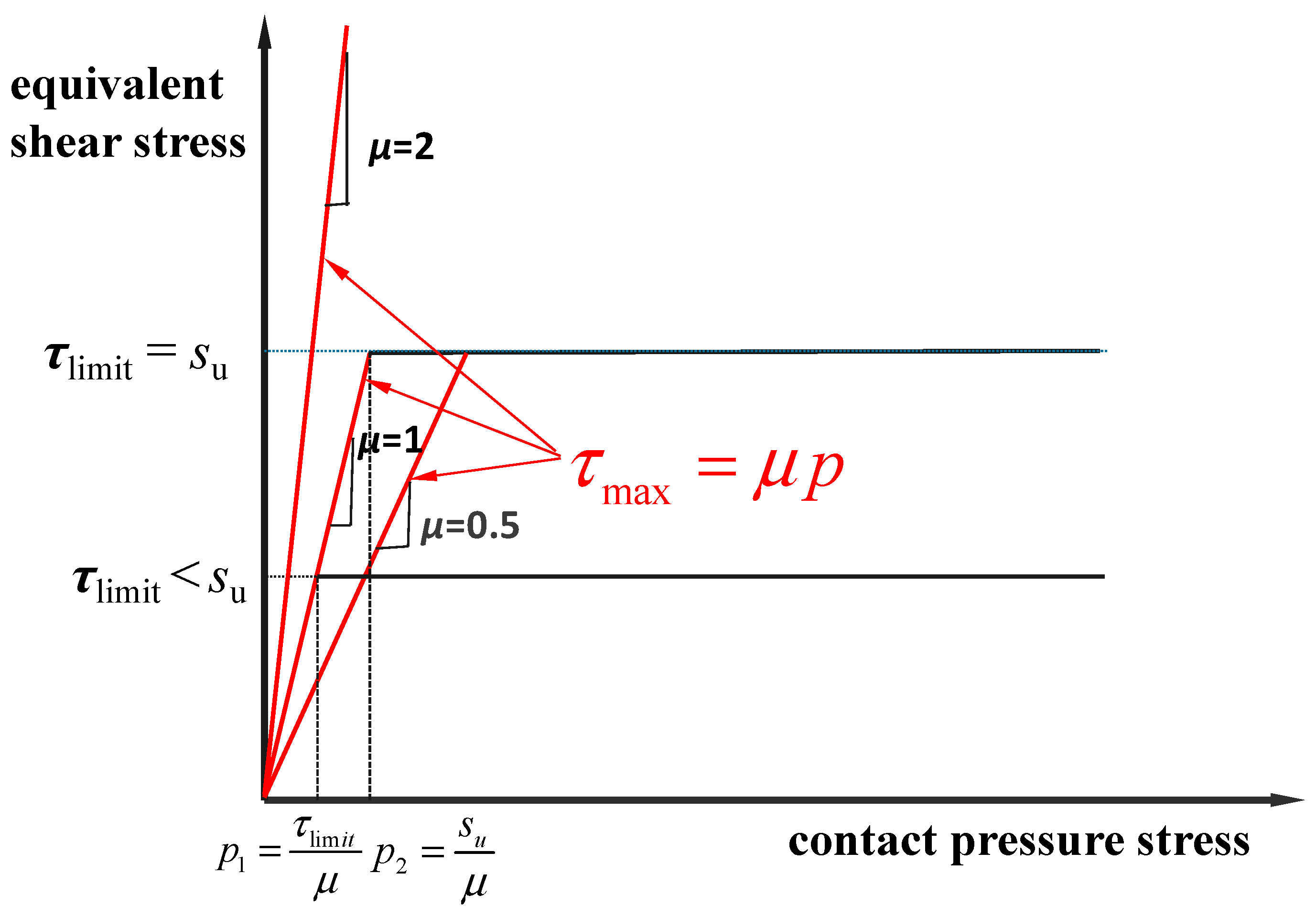
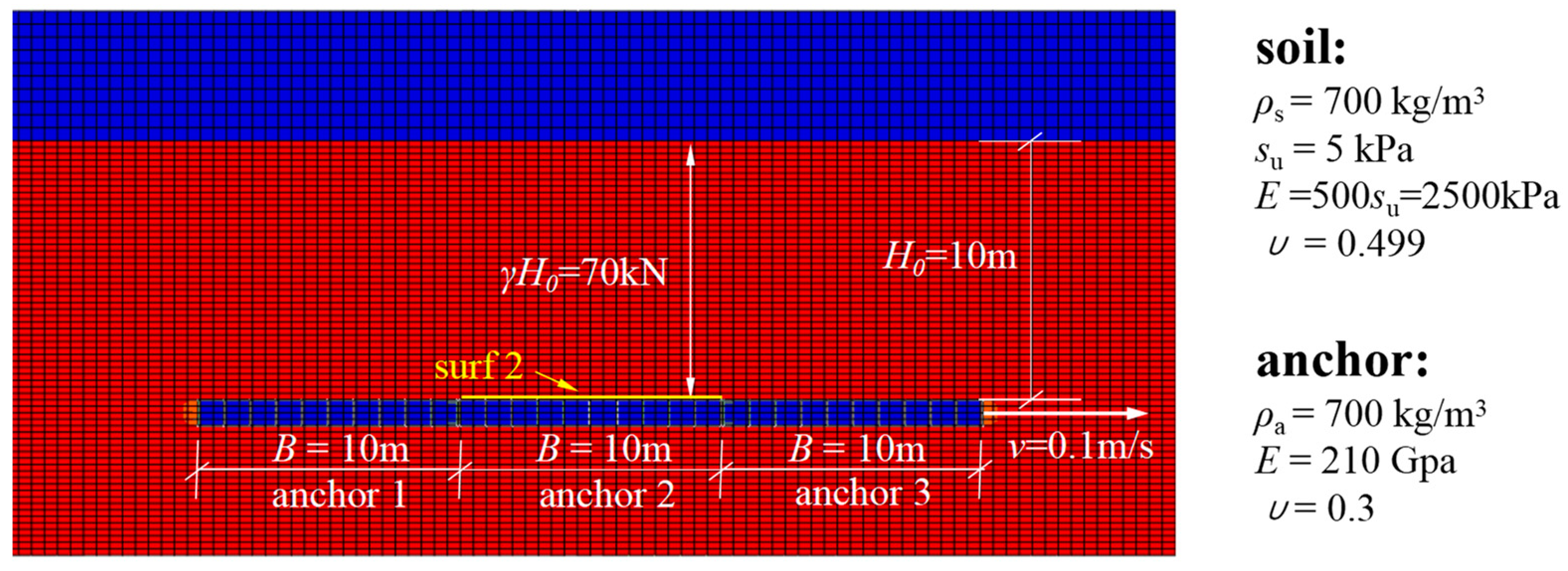
2.2. Model of Soil
2.3. Numerical Cases
3. Results
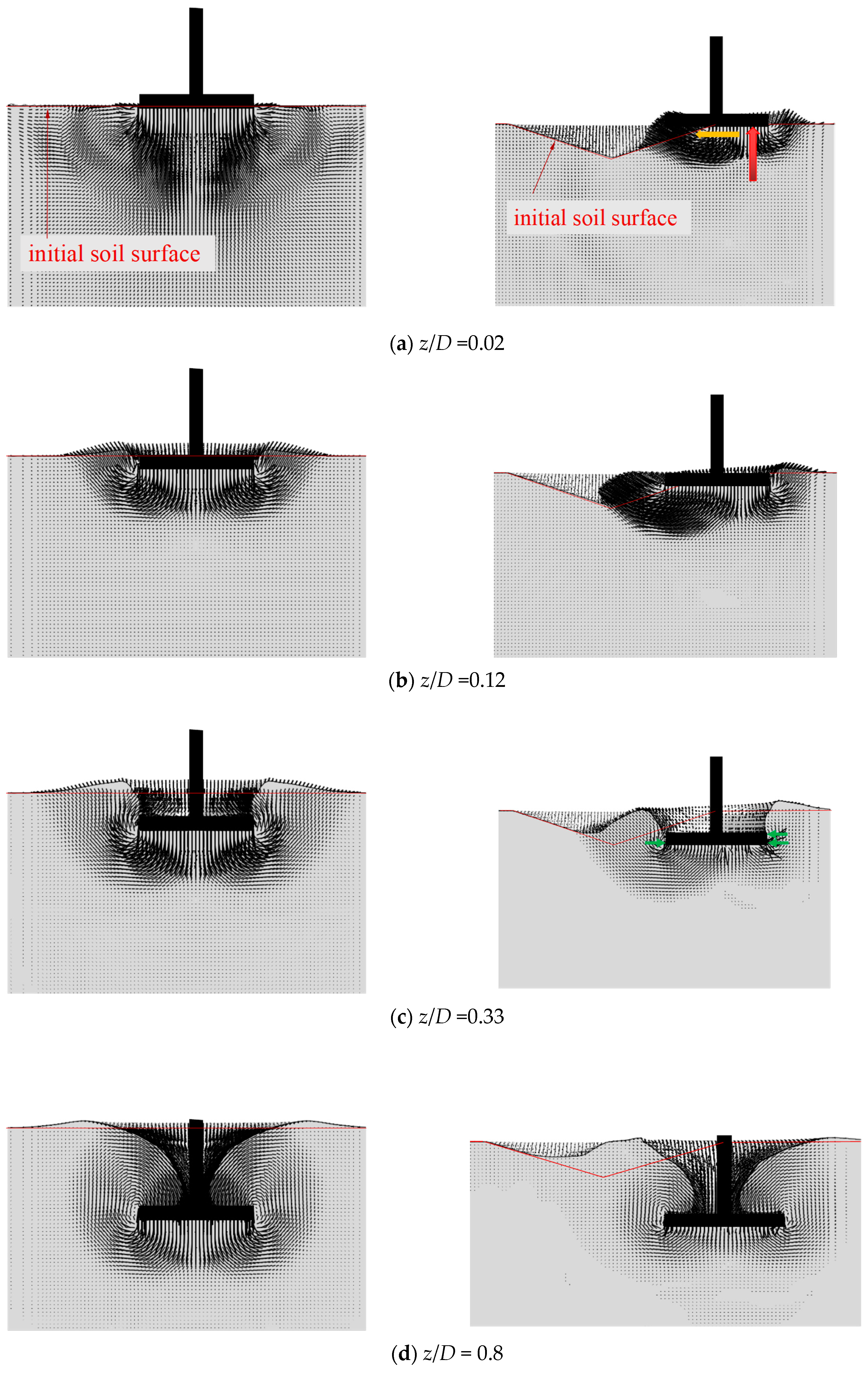
3.1. Effect of An Existing Footprint
3.2. Effect of An Existing Footprint
3.3. Effect of the Location of the Reference Point (Working Leg Length)
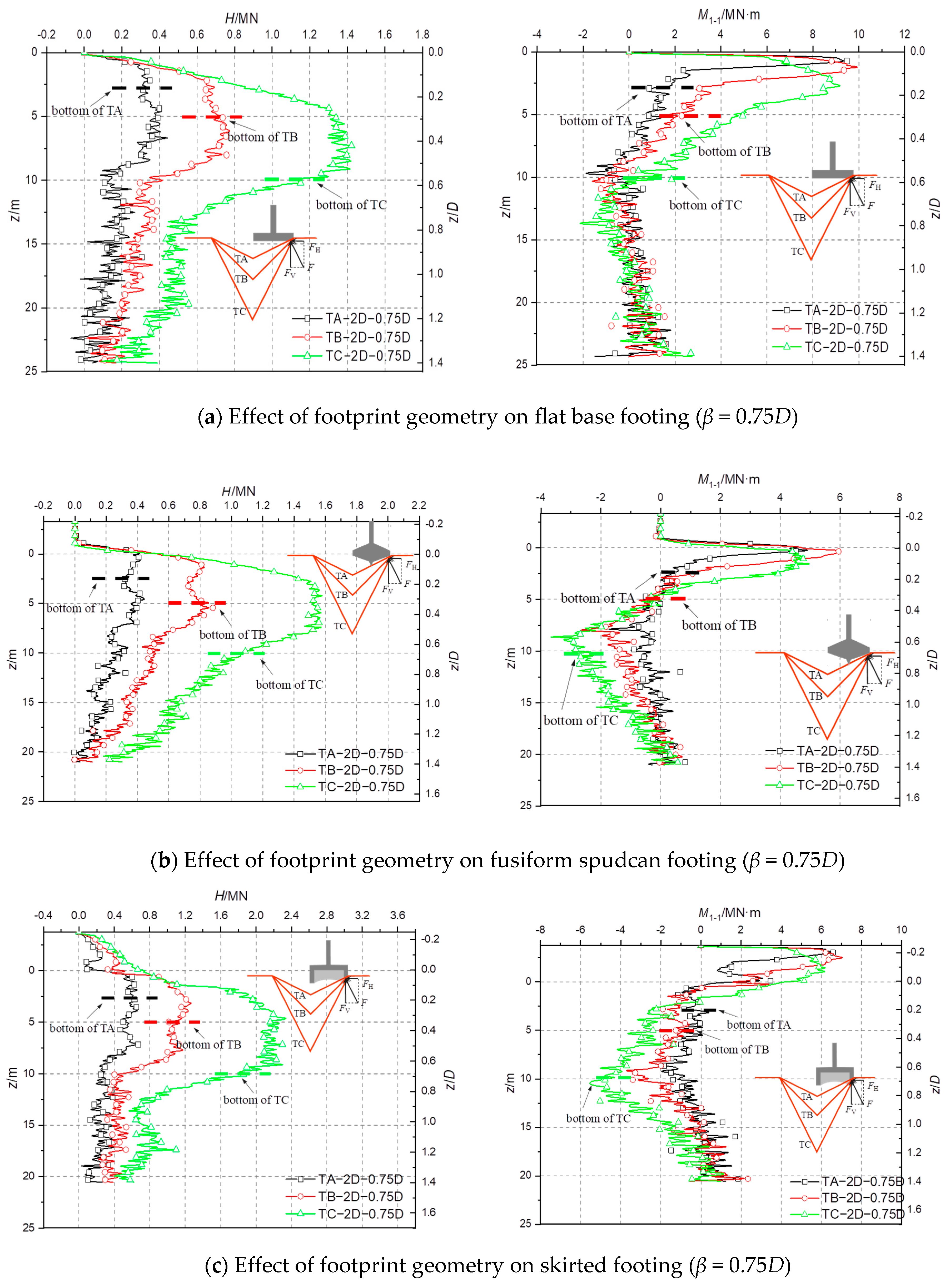
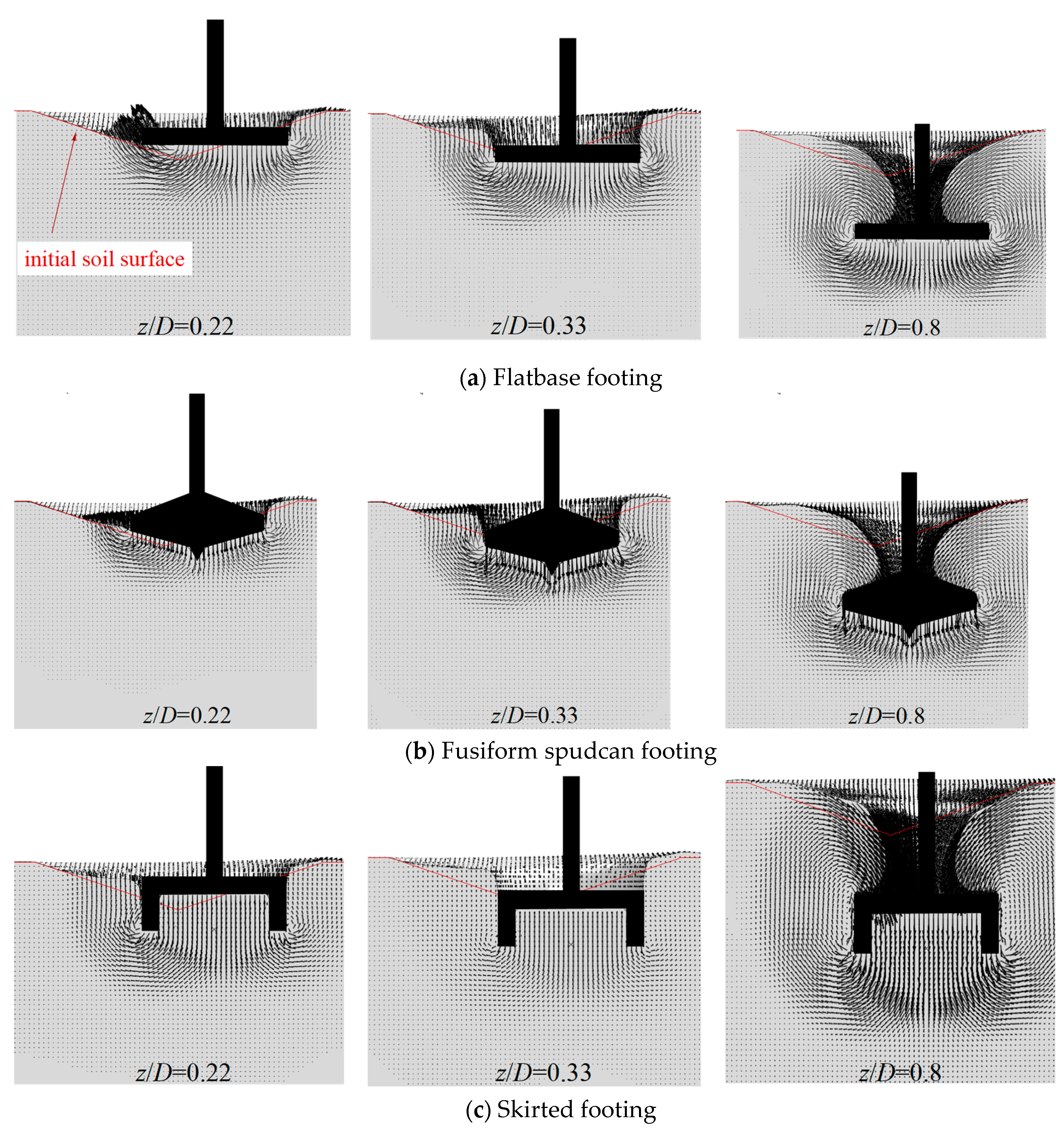
3.4. Effect of Footprint Geometry
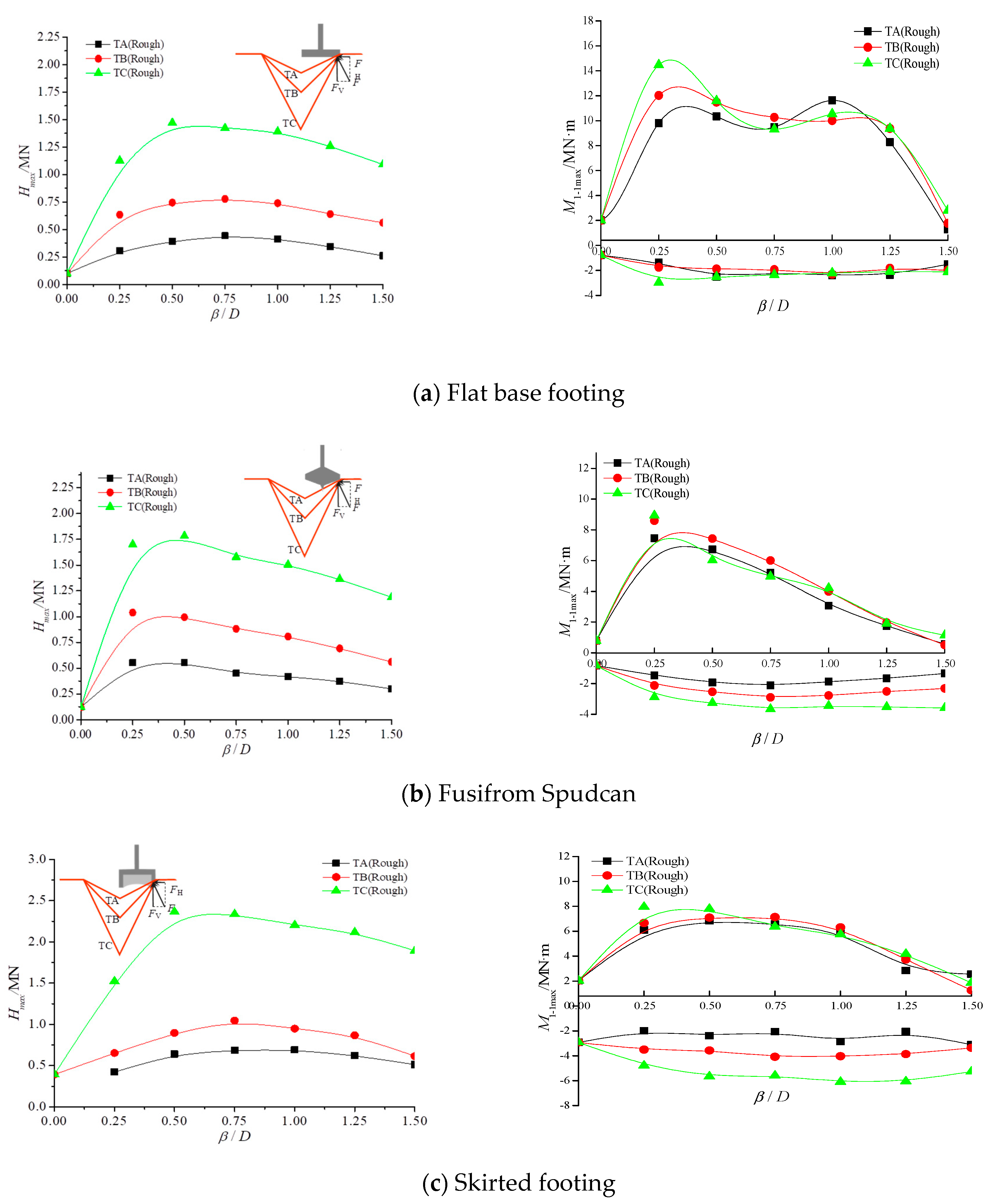
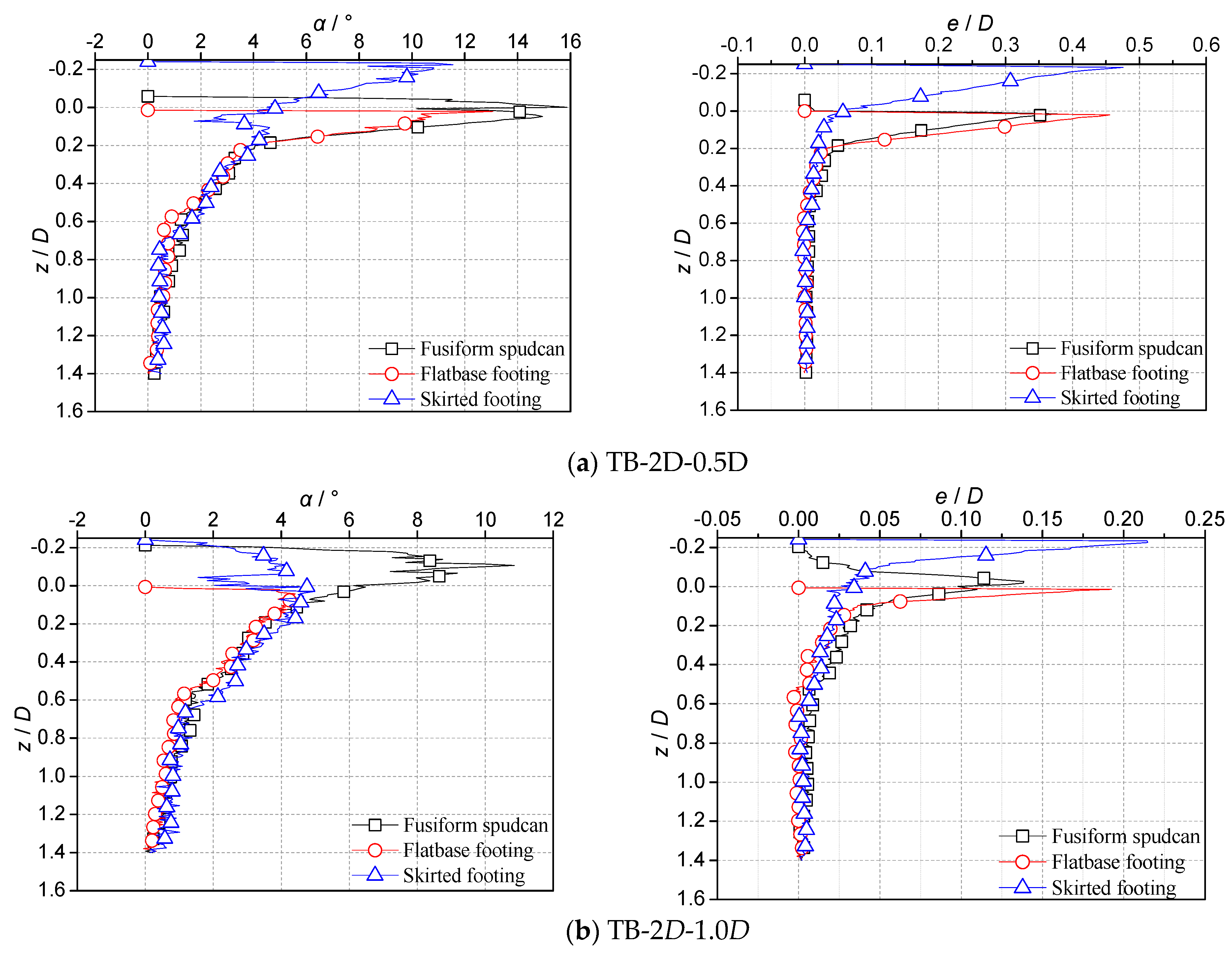
3.5. Effect of Footings’ Geometry Shape and Offset Distance
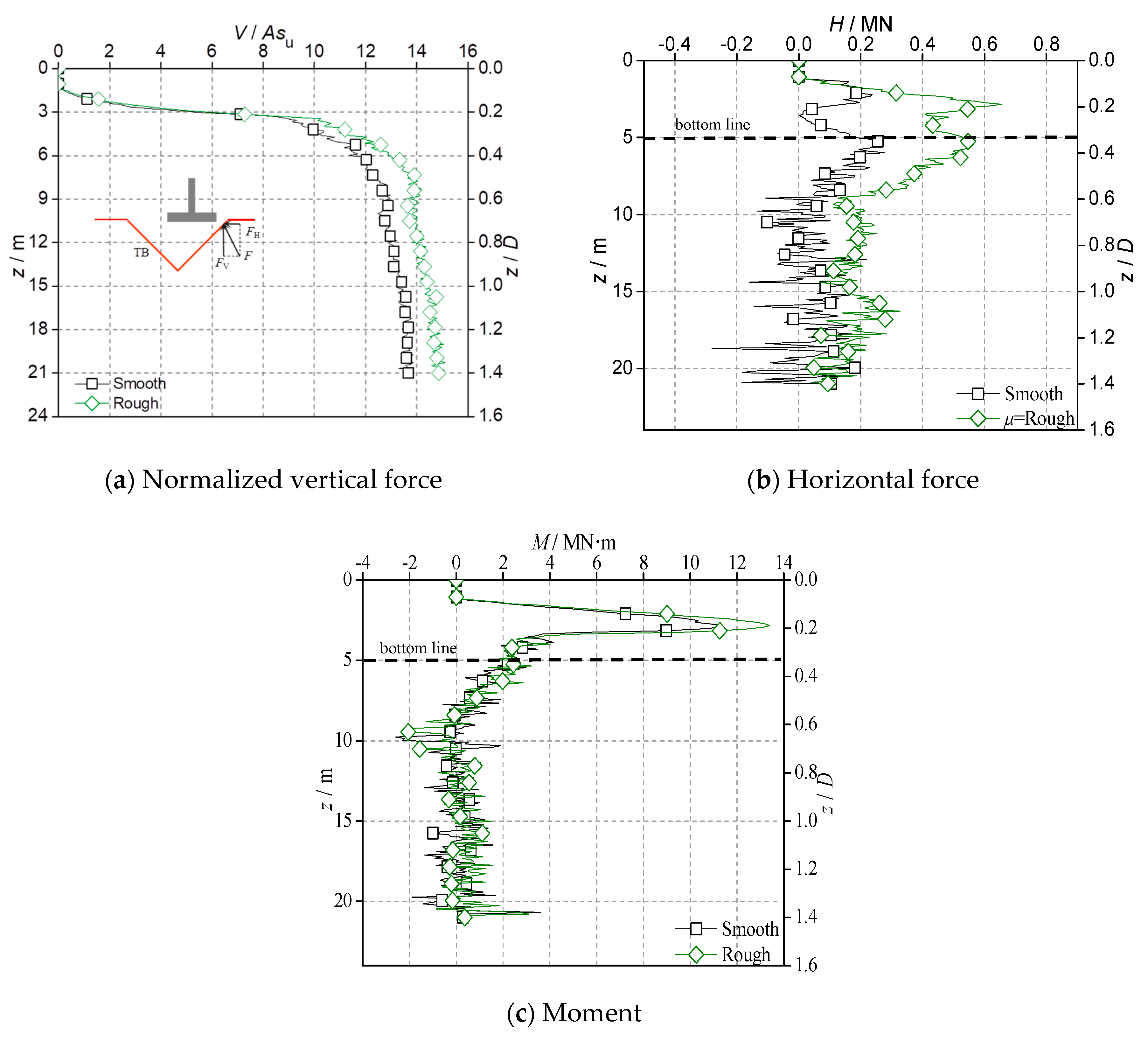
3.6. Resultant Force of V H and M
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

| Footprint | β/D | Hmax/MN | Mmax/MN·m | |||||
|---|---|---|---|---|---|---|---|---|
| Fusiform Spudcan Footing | Flat Base Footing | Skirted Footing | Fusiform Spudcan Footing | Flat base Footing | Skirted Footing | |||
| TA | 0.25 | 0.55349 | 0.30883 | 0.42189 | 7.44231 | 9.80965 | 6.09376 | |
| 0.5 | 0.5524 | 0.39296 | 0.6407 | 6.72754 | 10.3384 | 6.84643 | ||
| 0.75 | 0.45052 | 0.44328 | 0.68789 | 5.20043 | 9.48458 | 6.57694 | ||
| 1.0 | 0.4187 | 0.41402 | 0.6905 | 3.06038 | 11.6203 | 6.06864 | ||
| 1.25 | 0.37315 | 0.34509 | 0.62492 | 1.73015 | 8.2809 | 2.8528 | ||
| 1.5 | 0.29904 | 0.26207 | 0.51236 | 0.56979 | 1.28662 | 2.54351 | ||
| TB | 0.25 | 1.0387 | 0.63409 | 0.77274 | 8.59083 | 12.0215 | 6.65431 | |
| 0.5 | 0.99436 | 0.74464 | 1.14443 | 7.42953 | 11.4894 | 7.08853 | ||
| 0.75 | 0.8814 | 0.77806 | 1.29267 | 6.00388 | 10.2634 | 7.13538 | ||
| 1.0 | 0.80606 | 0.73853 | 1.2015 | 3.99285 | 10.007 | 6.30153 | ||
| 1.25 | 0.69096 | 0.64062 | 1.10797 | 1.96356 | 9.37414 | 3.72762 | ||
| 1.5 | 0.5602 | 0.56196 | 0.9585 | 0.5096 | 1.77092 | 1.25643 | ||
| TC | 0.25 | 1.701 | 1.12667 | 1.52282 | 8.93624 | 14.4618 | 7.94377 | |
| 0.5 | 1.78348 | 1.47111 | 2.36442 | 6.0261 | 11.5915 | 7.78829 | ||
| 0.75 | 1.57796 | 1.42199 | 2.33573 | 4.96665 | 9.31258 | 6.36396 | ||
| 1.0 | 1.50321 | 1.3904 | 2.203 | 4.20818 | 10.5380 | 5.74945 | ||
| 1.25 | 1.36363 | 1.25953 | 2.11594 | 1.90344 | 9.36561 | 4.17154 | ||
| 1.5 | 1.18654 | 1.09092 | 1.89335 | 1.13969 | 2.79521 | 1.85664 | ||
References
- Dier, A.; Carroll, B.; Abolfathi, S. Guidelines for Jack–up Rigs with Particular Reference to Foundation Integrity; HSE Books: Hong Kong, 2004. [Google Scholar]
- Jack, R.L.; Hoyle, M.J.R.; Smith, N.P.; Hunt, R.J. Jack–up accident statistics—A further update. In Proceedings of the 14th International Conference on the Jack–up Platform Design, Construction and Operation, London, UK, 17–18 September 2013. [Google Scholar]
- Cassidy, M.J.; Quah, C.K.; Foo, K.S. Experimental Investigation of the Reinstallation of Spudcan Footings Close to Existing Footprints. J. Geotech. Geoenviron. Eng. 2009, 135, 474–486. [Google Scholar] [CrossRef]
- Gan, C.T. Centrifuge model study on spudcan–footprint interaction. Ph.D. Thesis, National University of Singapore, Singapore, 2 November 2009. [Google Scholar]
- Dean, E. A spudcan foundation model with excess pore pressures. Part 1. A principle of effective loads. Mar. Struct. 2004, 17, 219–243. [Google Scholar] [CrossRef]
- Gan, C.T.; Leung, C.F.; Cassidy, M.J.; Gaudin, C.; Chow, Y.K. Effect of time on spudcan–footprint interaction in clay. Geotechnique 2012, 62, 401–413. [Google Scholar] [CrossRef]
- Byrne, B.W.; Villalobos, F.; Houlsby, G.T.; Martin, C.M. Laboratory testing of shallow skirted foundations in sand. In Proceedings of the BGA International Conference on Foundations, Innovations, Observations, Design and Practice, Dundee, UK, 2–5 September 2003; pp. 161–173. [Google Scholar]
- Leung, C.; Gan, C.; Chow, Y. Shear strength changes within jack–up spudcan footprint. In Proceedings of the Seventeenth International Offshore and Polar Engineering Conference: International Society of Offshore and Polar Engineers, Lisbon, Portugal, 1–6 July 2007; pp. 1504–1509. [Google Scholar]
- Hartono, H.; Tho, K.; Leung, C.; Chow, Y. Centrifuge and Numerical Modelling of Reaming as a Mitigation Measure for Spudcan–Footprint Interaction. In Proceedings of the Offshore Technology Conference–Asia: Offshore Technology Conference, Kuala Lumpur, Malaysia, 25–28 March 2014; pp. 1478–1492. [Google Scholar]
- Gan, C.T.; Teh, K.L.; Leung, C.F.; Chow, Y.K.; Swee, S. Behaviour of skirted footings on sand overlying clay. In Proceedings of the 2nd International Symposium on Frontiers in Offshore Geotechnics, Perth, Australia, 8–10 November 2011; pp. 415–420. [Google Scholar]
- Hossain, M.S.; Hu, Y.; Ekaputra, D. Skirted foundation to mitigate spudcan punch–through on sand–over–clay. Geotechnique 2014, 64, 333–340. [Google Scholar] [CrossRef]
- Hai–bo, Y. The Optimization of HYSY 944 Jack–up Spudcan Piping Arrangement. Chin. Offshore Platform. 2016, 31, 23–26. [Google Scholar]
- Kong, V.; Cassidy, M.J.; Gaudin, C. Experimental study of effect of geometry on reinstallation of jack–up next to footprint. Can. Geotech. J. 2013, 50, 557–573. [Google Scholar] [CrossRef]
- Kong, V.; Cassidy, M.J.; Gaudin, C. Failure mechanisms of a spudcan penetrating next to an existing footprint. Theor. Appl. Mech. Lett. 2015, 5, 64–68. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Cassidy, M.J.; Tian, Y. 3D Large Deformation Finite Element Analyses of Jack–up Reinstallations Near Idealised Footprints. In Proceedings of the 15th International Conference on the Jack–Up Platform Design, Construction and Operation, London, UK, 15–16 September 2015. [Google Scholar]
- Jun, M.; Kim, Y.; Hossain, M.; Cassidy, M.; Hu, Y.; Park, S. Global jack–up rig behaviour next to a footprint. Mar. Struct. 2019, 64, 421–441. [Google Scholar] [CrossRef]
- Jun, M.; Kim, Y.; Hossain, M.; Cassidy, M.; Hu, Y.; Park, S. Optimising spudcan shape for mitigating horizontal and moment loads induced on a spudcan penetrating near a conical footprint. Appl. Ocean Res. 2018, 79, 62–73. [Google Scholar] [CrossRef]
- Jun, M.; Kim, Y.; Hossain, M.; Cassidy, M.; Hu, Y.; Park, S. Physical modelling of reinstallation of a novel spudcan nearby existing footprint. Phy. Model. Geotech. 2018, 1, 615–621. [Google Scholar]
- Jun, M.; Kim, Y.; Hossain, M.; Cassidy, M.; Hu, Y.; Sim, J. Numerical investigation of novel spudcan shapes for easing spudcan–footprint interactions. J. Geotech. Geoenviron. Eng. 2018, 144, 04018055. [Google Scholar] [CrossRef]
- Stewart, D.P.; Finnie, M.S. Spudcan–Footprint Interaction During Jack–Up Workovers. In Proceedings of the 11th International Offshore and Polar Engineering Conference, Stavanger, Norway, 17–22 June 2001; pp. 61–65. [Google Scholar]
- Carrington, T.; Hodges, B.; Aldridge, T.; Osborne, J.; Mirrey, J. Jack–Up Advanced Foundation Analysis by Automatic Re–meshing (Large Strain) FEA Methods. In Proceedings of the 9th International Conference on Jack–Up Platform Design, Construction and Operation, London, UK, 23–24 September 2003. [Google Scholar]
- Foo, K.; Quah, C.; Wildberger, P.; Vasquez, J. Spudcan footprint interaction and rack phase difference (RPD). In Proceedings of the 9th International Conference on Jack–Up Platform Design, Construction and Operation, London, UK, 23–24 September 2003. [Google Scholar]
- Dean, E.R.; Serra, H. Concepts for mitigation of spudcan–footprint interaction in normally consolidated clay. In Proceedings of the Fourteenth International Offshore and Polar Engineering Conference: International Society of Offshore and Polar Engineers, Toulon, France, 23–28 May 2004; pp. 721–728. [Google Scholar]
- Jardine, R.; Kovacevic, N.; Hoyle, M.; Sidhu, H.K.; Letty, A. Assessing The Effects On Jack Up Structures Of Eccentric Installation Over Infilled Craters. In Proceedings of the International Conference—Offshore Site Investigation and Geotechnics “Diversity and Sustainability”, London, UK, 26–28 November 2002; pp. 307–324. [Google Scholar]
- Kong, V.W. Jack–up reinstallation near existing footprints. Ph.D. Thesis, University of Western Australia, Perth, WA, Australia.
- Liu, J.; Hu, Y.X.; Kong, X.J. Deep penetration of spudcan foundation into double layered soils. Chin. Ocean Eng. 2005, 19, 309–324. [Google Scholar]
- Yu, L.; Hu, Y.; Liu, J.; Randolph, M.F.; Kong, X. Numerical study of spudcan penetration in loose sand overlying clay. Comp. Geotech. 2012, 46, 1–12. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















| Footprint Type | Prototype (m) | Ө (°) | β (m) | Case Name | |
|---|---|---|---|---|---|
| DF | ZF | ||||
| TA | 30 | 2.5 | 9.5 | 0.25D, 0.5D, 0.75D, 1.0D, 1.25D, 1.5D, 2.0D | TB-2D-0.25D(μ) (μ is friction coefficient) |
| TB | 30 | 5 | 18.4 | ||
| TC | 30 | 10 | 33.7 | ||
| Flat surface | - | - | - | 0 | FS |
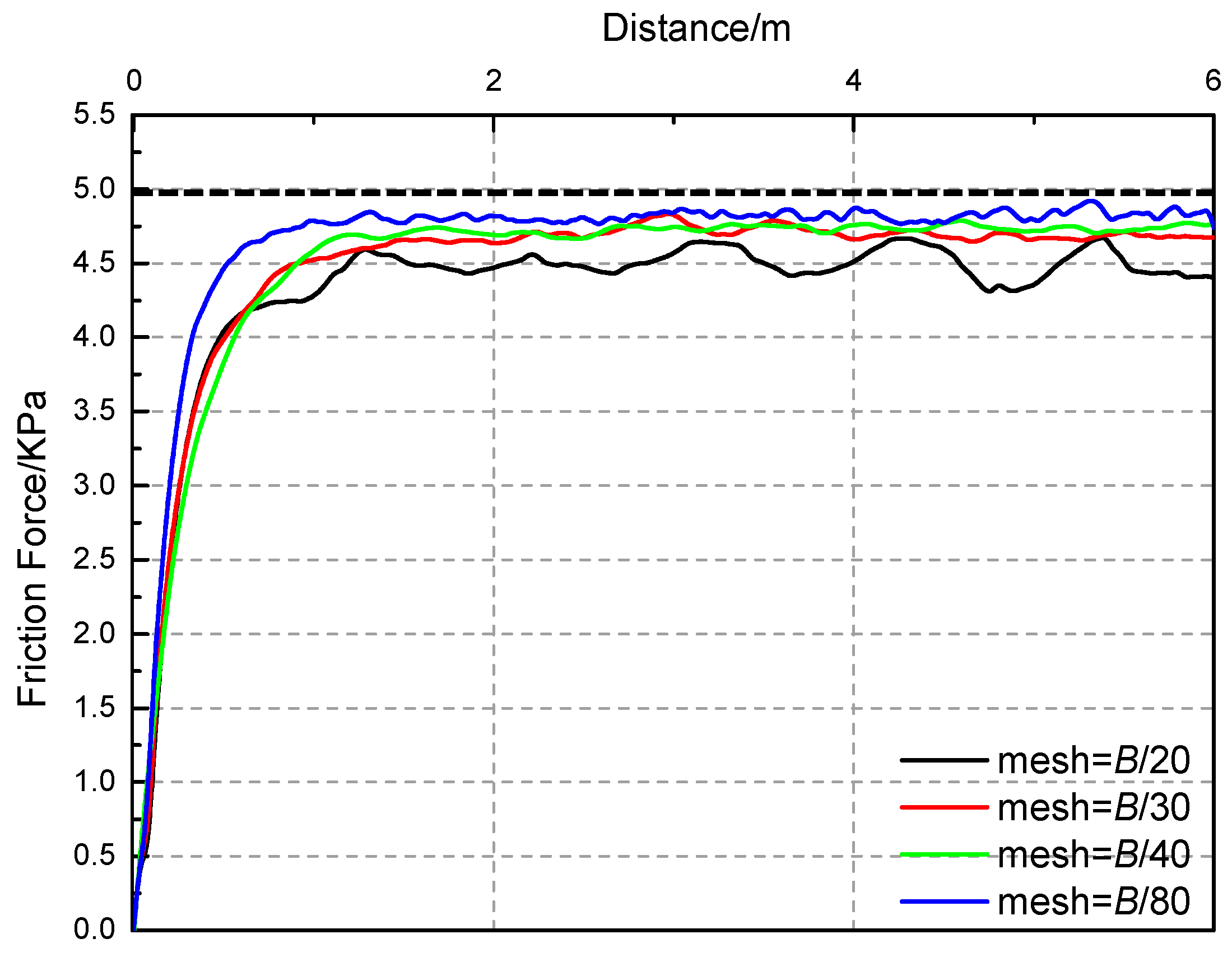
| The minimum Element Size bmin/B | Numerical Friction Force (kPa) | Theoretical Friction Force (kPa) | Calculation Error (%) |
|---|---|---|---|
| 1/20 | 4.55 | 5 | 9 |
| 1/30 | 4.7 | 5 | 6 |
| 1/40 | 4.75 | 5 | 5 |
| 1/80 | 4.85 | 5 | 3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, L.; Zhang, H.; Li, J.; Wang, X. Finite Element Analysis and Parametric Study of Spudcan Footing Geometries Penetrating Clay Near Existing Footprints. J. Mar. Sci. Eng. 2019, 7, 175. https://doi.org/10.3390/jmse7060175
Yu L, Zhang H, Li J, Wang X. Finite Element Analysis and Parametric Study of Spudcan Footing Geometries Penetrating Clay Near Existing Footprints. Journal of Marine Science and Engineering. 2019; 7(6):175. https://doi.org/10.3390/jmse7060175
Chicago/Turabian StyleYu, Long, Heyue Zhang, Jing Li, and Xian Wang. 2019. "Finite Element Analysis and Parametric Study of Spudcan Footing Geometries Penetrating Clay Near Existing Footprints" Journal of Marine Science and Engineering 7, no. 6: 175. https://doi.org/10.3390/jmse7060175
APA StyleYu, L., Zhang, H., Li, J., & Wang, X. (2019). Finite Element Analysis and Parametric Study of Spudcan Footing Geometries Penetrating Clay Near Existing Footprints. Journal of Marine Science and Engineering, 7(6), 175. https://doi.org/10.3390/jmse7060175