1. Introduction
In recent years, with advances in science and technology, maritime traffic has increased and brought many conveniences to human life. However, the increasing complexity of maritime traffic has gradually led to more safety problems. Frequent ship collisions cause serious economic losses and threaten the safety of passengers and crew members. Furthermore, worsening environmental pollution caused by ship collisions cannot be neglected. Despite a large body of research and methods devoted to reducing collisions at sea, ship collision accidents are inevitable. Thus, ship collision avoidance has become a research hotspot.
To minimize ship collisions, thereby increasing the safety of ships sailing at sea and reducing the associated losses, researchers in various countries have explored a range of methods for ship collision avoidance. According to the European Maritime Safety Agency’s review [
1] of maritime casualties in 2017, EU member states reported 3145 maritime accidents in 2016. More than half of these accidents were caused by ship collisions, and more than 60% of the collisions were caused by human error. Thus, reducing human errors during navigation at sea has become an important focus of research, with an emphasis on improving the navigator decision-making processes.
Algorithms such as the genetic algorithm, neural network, and distributed algorithm have been applied to ship collision avoidance problems. In addition, automatic radar plotting aid (ARPA) and automatic identification system (AIS) have been used to help make collision avoidance decisions. ARPA offers accurate information about the bearing and distance of nearby obstacles, while AIS provides important information about the ship’s course, speed, and position. These data provide a powerful basis for effective ship collision avoidance. By far, many researchers have studied the ship domain in different waters with the help of AIS data. For example, Xiang et al. [
2] proposed a calculation method for ships in restricted waters based on AIS data. Hansen M.G. et al. [
3] used AIS data to study the ship domain in the bridge area and crossing waters and Zhang et al. [
4] develop an effective big AIS data-driven approach to determine the probabilistic ship domain. Ding et al. [
5] used AIS data to make statistics on the ship domain of different types of ships and ships of different sizes in open waters. Although research using AIS is now common, these systems can only be used as assistant tools to identify obstacles and offer additional navigation information. While these tools provide accurate and reliable information for navigators as the basis for decision-making, sailors cannot use this information to make navigation decisions.
Some algorithms have been used to aid ship navigation decision-making systems. For example, Li et al. [
6] used an improved multiobjective algorithm to plan the collision avoidance trajectory of ships and to suggest safe navigation routes. In addition, Li et al. [
7] studied ship collision avoidance using distributed algorithms for preventing multi-ship collisions at sea. Tsou and Hsueh [
8] combined the ant colony algorithm with onboard AIS and geographic information system (GIS) systems for safe and economical collision avoidance route planning. The algorithms mentioned above, and others, can be used to plan the general ship collision avoidance route for multiple ships in the same water area, but the management of temporary accidents has not been well studied.
Previously, there have been researchers who used fuzzy logic to study navigation issues. Lee et al. [
9] proposed a fuzzy logic ship autonomous navigation algorithm based on COLREGs criterion. The VFF (Virtual Force Field) method is improved and applied to the autonomous navigation of ships. However, the fuzzy inference system is mainly based on COLREGs, which lacks sufficient consideration of the interference caused by various factors in navigation. Grinyak et al. [
10] proposed a fuzzy decision-making system about the motion’s danger level that combines Mamdani and Sugeno fuzzy inference systems, but it mainly considered a model of the relative motion of two vessels and neglected the environmental factors. Namgung [
11] proposed a fuzzy inference system that expressed appropriate collision risk index corresponding to level. It can measure the fuzzy risk index, but it cannot play a direct role in the sailor’s decision warning. In this paper, composition fuzzy inference is carried out by comprehensively considering the ship’s own factors and environmental factors when the ship is sailing at sea, giving the ship early collision warning and reminding the sailor to take measures to avoid collision.
When malfunction occurs or the ship fails to sail along an expected path or at an expected speed, the sailor’s timely response is crucial. In the past, sailors’ decisions were based on experience but with further research on the behavior of the navigating ships and intelligence science and technology, collision risk warnings can be achieved by other means. For instance, the ship domain model can be used to evaluate collision risk. Ship domains represent a defined area around the ship that other ships should not enter to ensure that the ship navigates safely through waters. Thus, the ship domain can be used as a standard safety measure and a reference parameter for evaluating collision risk, and it is also the basis for taking actions in ship collision avoidance.
The concept of ship domains was first proposed by Japanese scholar Fujii [
12] as an elliptical domain proportional to the length of the ship. Goodwin [
13], Davis [
14], Coldwell [
15], and others were inspired to establish other ship domain models’ statistical observations. Vander Tak et al. [
16] used the ship domain model to calculate the frequency of ship encounters for assessing maritime traffic hazards. Later, the ship domain concept was further extended. Pietrzykowski and Uriasz [
17,
18,
19] introduced the notion of the fuzzy ship domain and defined ship domains in both open waters and restricted waters. Qu et al. [
20] proposed three ship collision risk indicators based on the ship domain to quantitatively evaluate ship collision risk in a strait. Wang et al. [
21] proposed a fuzzy quaternion ship domain model (FQSD) and used analytic expressions to describe models. Zhou et al. [
22] introduced the dynamic fuzzy ship domain and established a ship domain model to determine collision risk between ships.
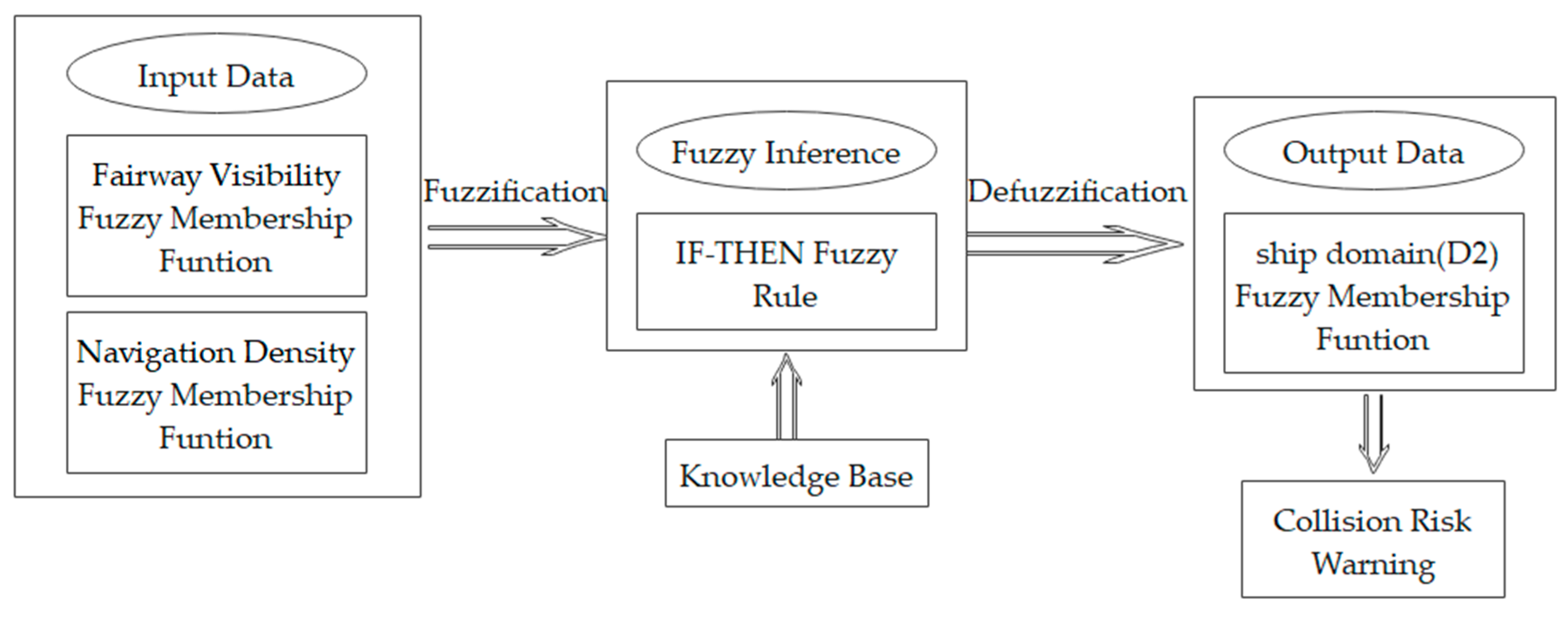
In this paper, the ship domain is used as the criterion for assessing collision risk. When other ships enter the ship domain, the situation becomes urgent and the ship must take action to avoid an imminent collision. Therefore, it is necessary to study the range and size of the ship domain. This paper proposes a fuzzy logic approach. The size of the ship domain is regarded as a fuzzy value that varies with the external environmental factors. A fuzzy control method is adopted to obtain a reasonable value of the ship domain by considering the dangerous inviolable area of each ship. Through fuzzification, fuzzy reasoning, and defuzzification, a reference for collision avoidance between ships is provided to effectively assist navigational decision-making.
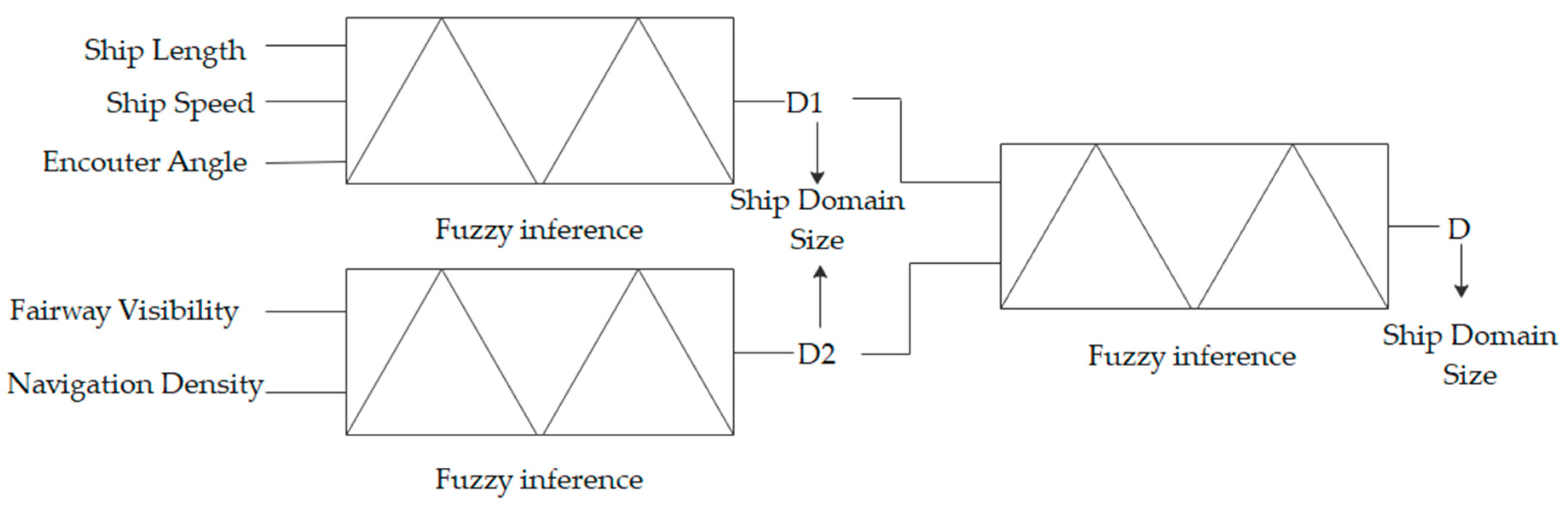
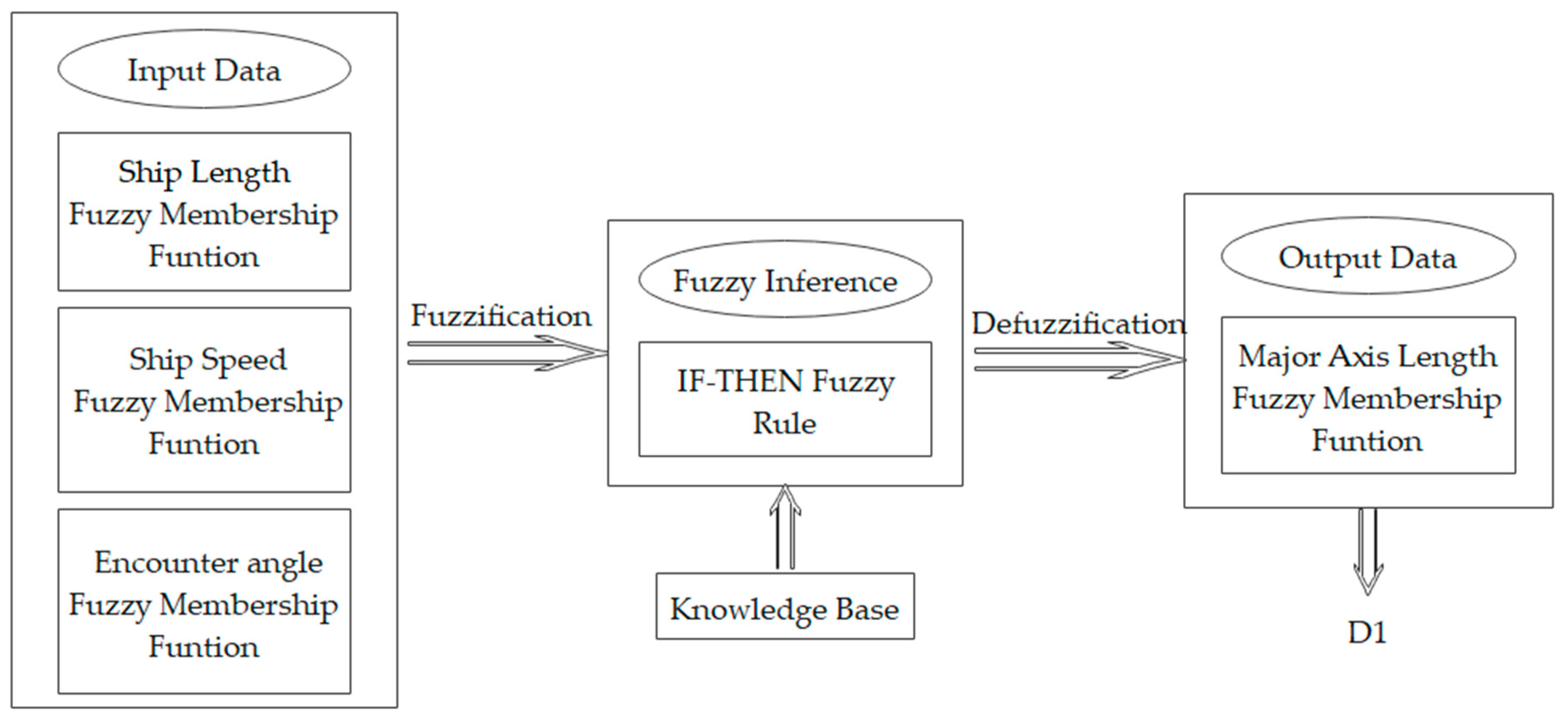
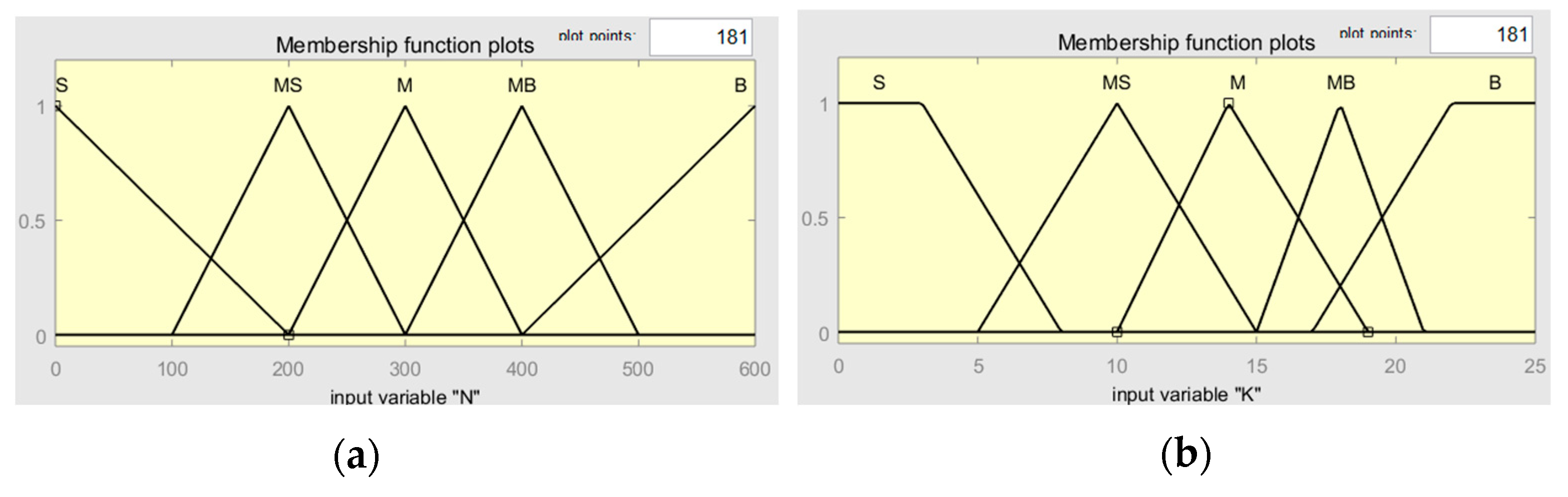
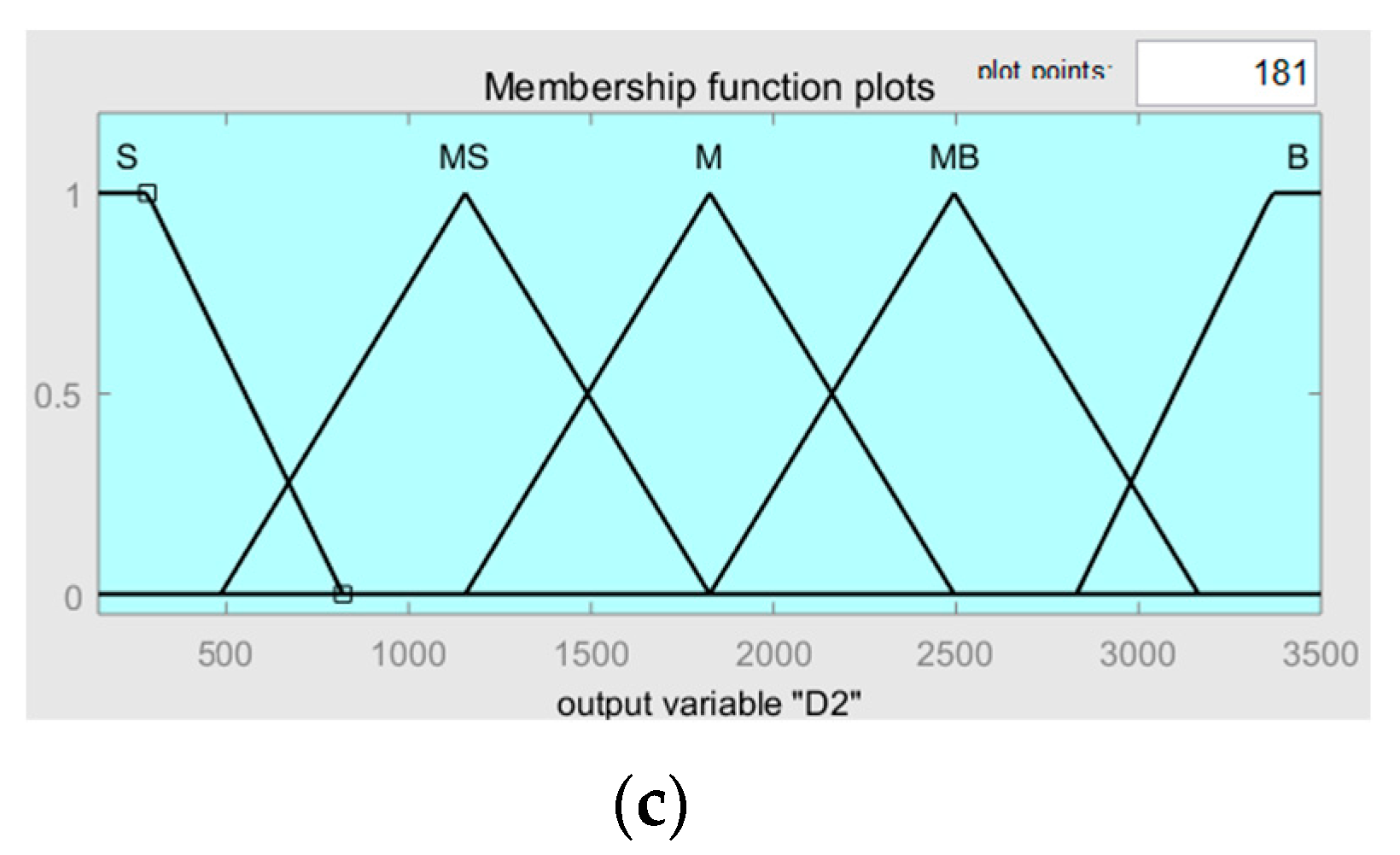
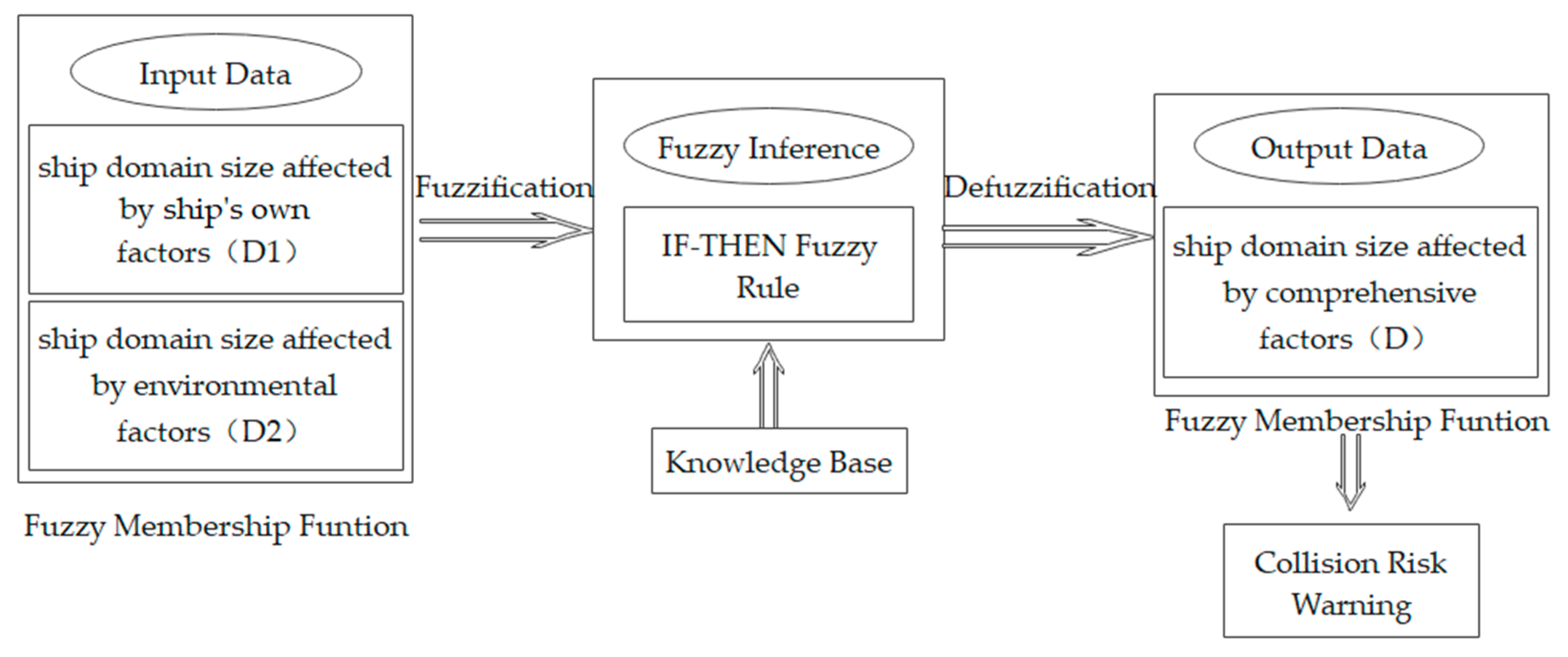
In view of the fact that there are many factors that affect the ship domain, a single fuzzy inference may not be able to consider as many influencing factors as possible, which limits the number of factors. So, the factors considered in the study of ship collision warning were always limited in the past. Moreover, environmental factors such as navigation density and fairway visibility are always ignored. However, removing too many factors from the model can lead to excessive errors. The proposed composition fuzzy inference method combines the results of multiple fuzzy inferences and then performs fuzzy inference, retaining as many relevant factors as possible, which solves the problem of oversize errors caused by too many factors that need to be deleted in the past, thereby providing a more accurate estimate of the ship domain size, which can be used for more accurate and timely warning of collision danger to reduce the occurrence of collisions.
In addition, the previous research can only obtain the relationships between the ship domain and certain single factors. Here, the fuzzy logic method was used to not only obtain the changes in the ship domain with certain factors but also to simulate the influence of multiple factors on the size of the ship domain, which enables a more accurate description of the ship domain size. The proposed ship domain model could save both time and labor and enable the ship domain concept to be better applied in navigation systems.
The rest of the paper is organized as follows.
Section 2 describes the ship domain and its influencing factors, various factors are selected to determine the shape of the ship domain, and less significant factors are removed. In
Section 3, a fuzzy inference model of the ship domain is established considering five influencing factors including both own ship factors and environmental factors. In
Section 4, the simulation platform and inference system are introduced and the simulation experiments and results compared with the traditional methods are presented. In
Section 5, we summarize the advantages of the proposed method and the importance of early warning systems for preventing ship collisions.
4. Results
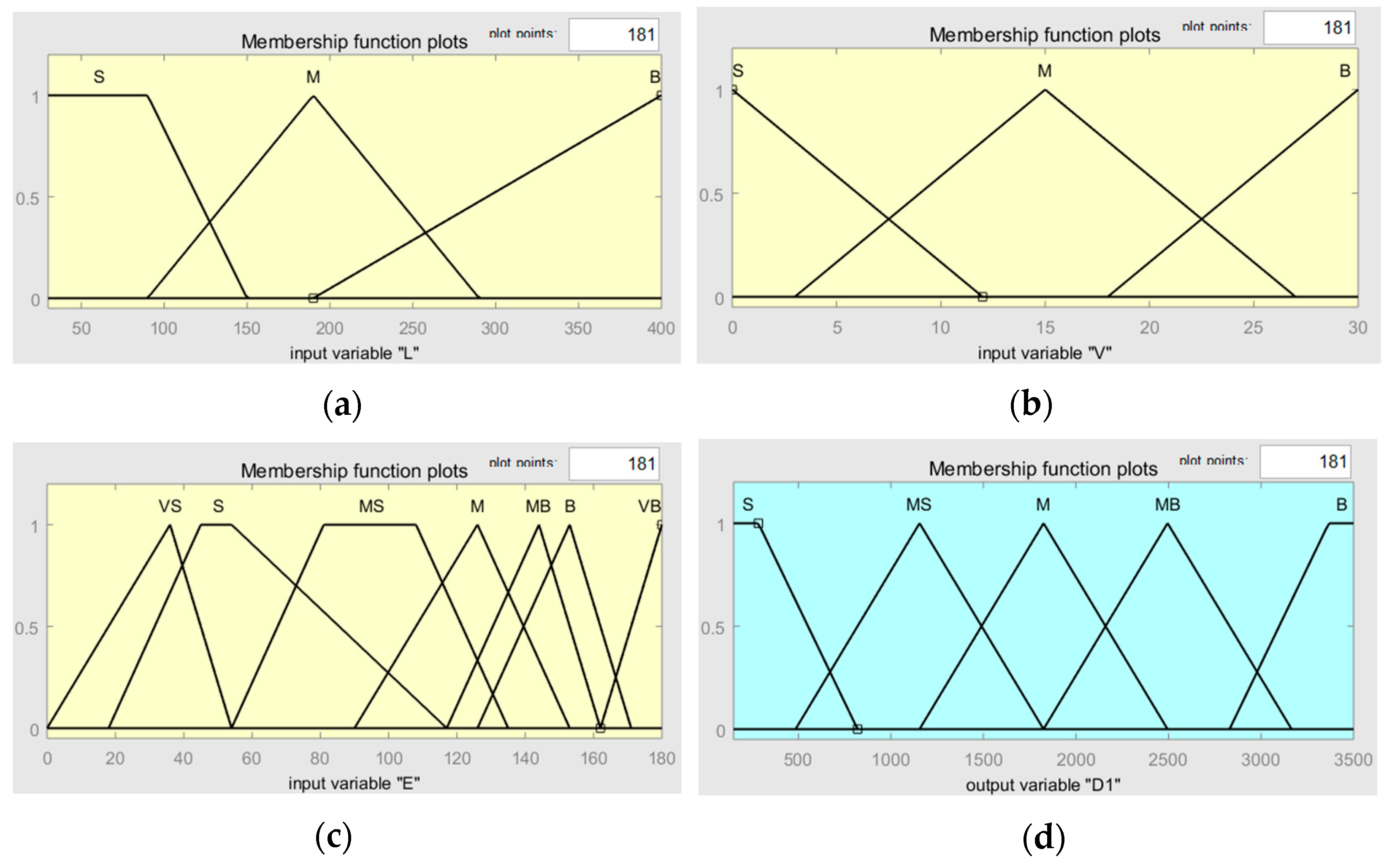
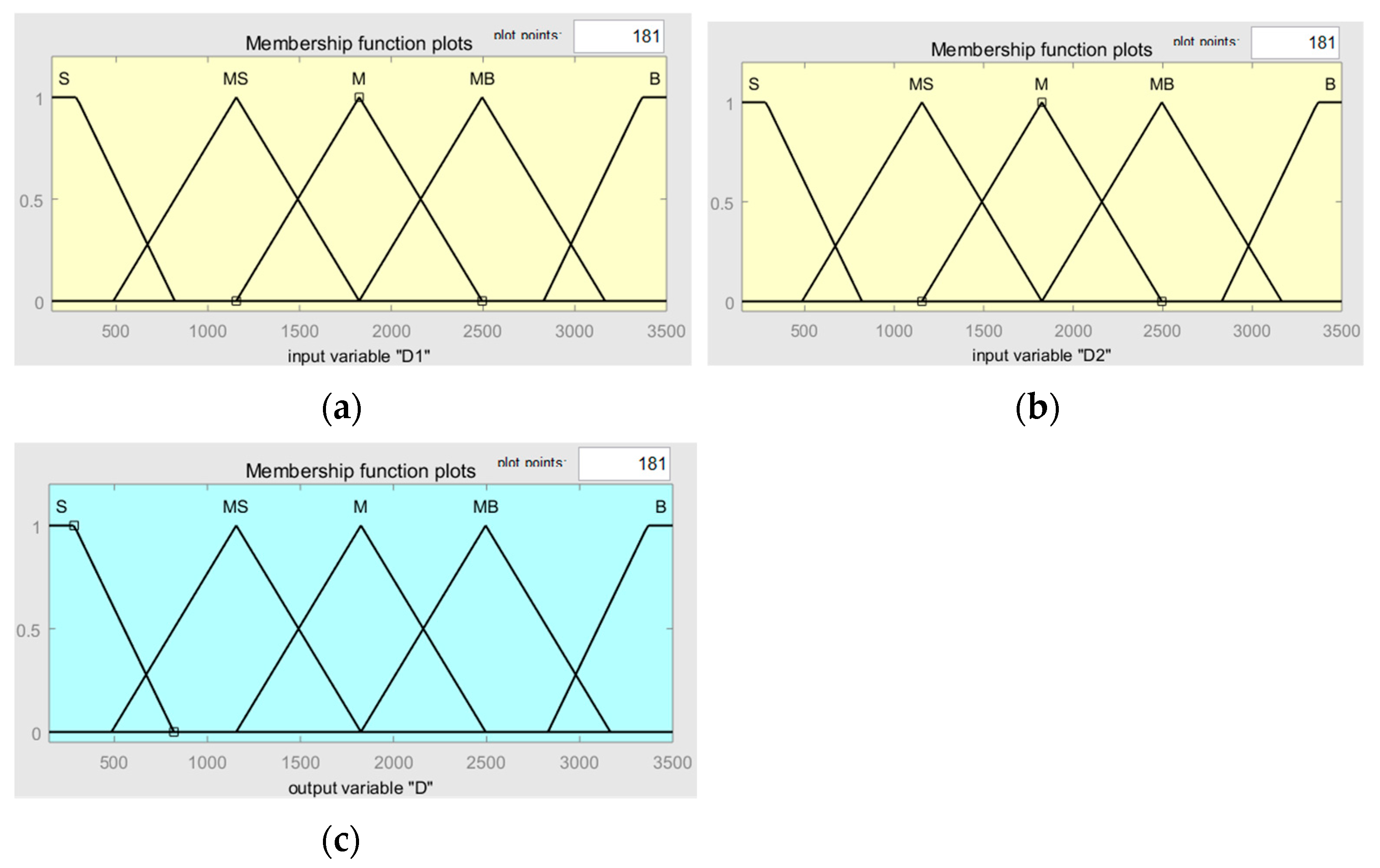
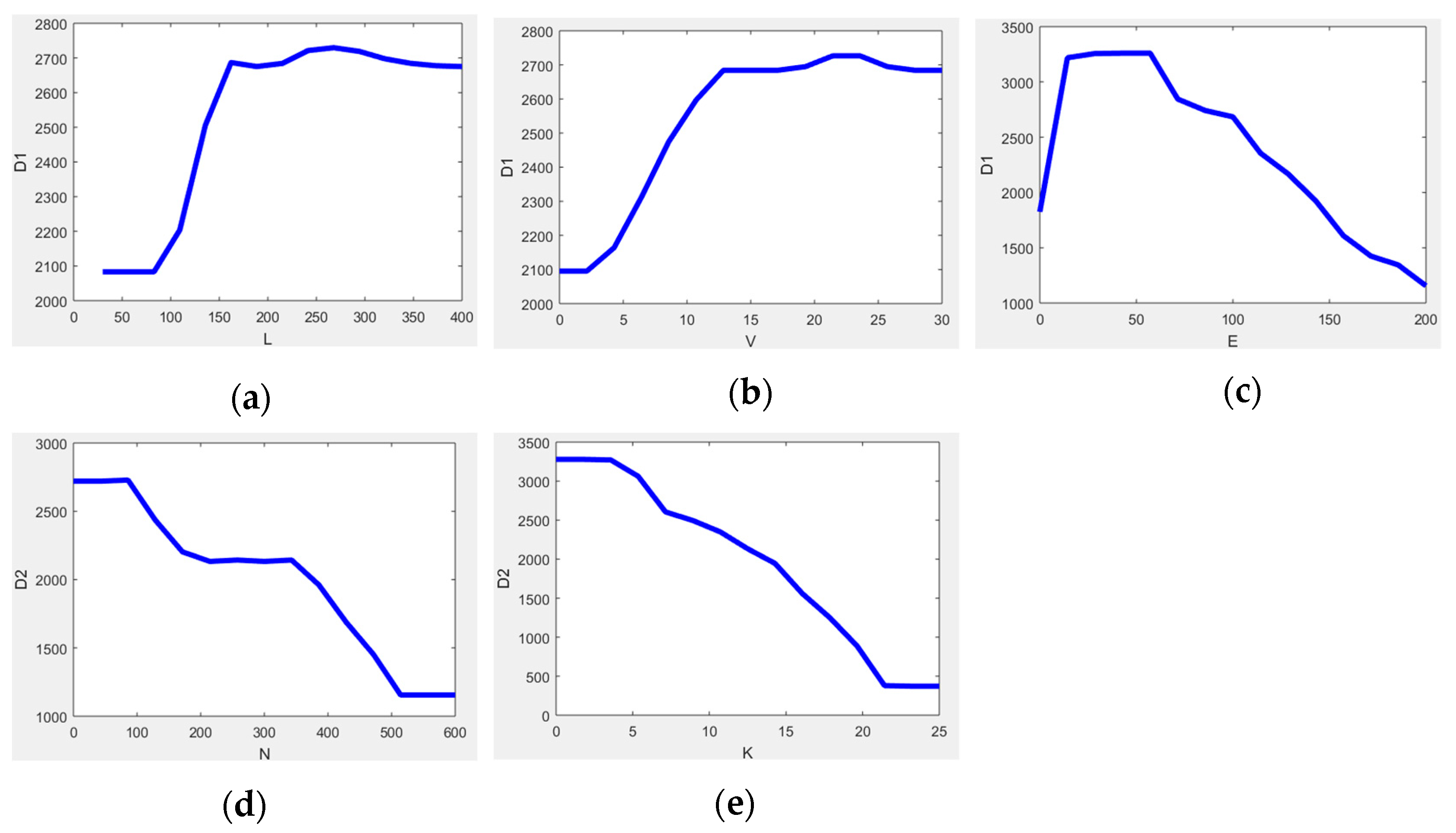
The MATLAB Fuzzy Logic Toolbox was used to construct and then simulate the fuzzy inference system, then the relationships between the size of the ship domain and influencing factors, including ship length (L), ship speed (V), encounter angle (E), navigation density (N), and fairway visibility (K) were obtained, as shown in
Figure 9.
The ship domain shows a trend of gradually increasing with the increase in size and speed of the ship, but gradually decreases with increasing encounter angle. Simultaneously, the size of the ship domain gradually decreases with increasing navigation density and fairway visibility, i.e., the smaller the navigation density, the lower the visibility and the larger the ship domain size. However, the ship domain does not have a linear relationship with these single factors. Thus, it can be seen, the influence result of each factor on ship domain obtained by fuzzy inference is similar to other studies [
22].
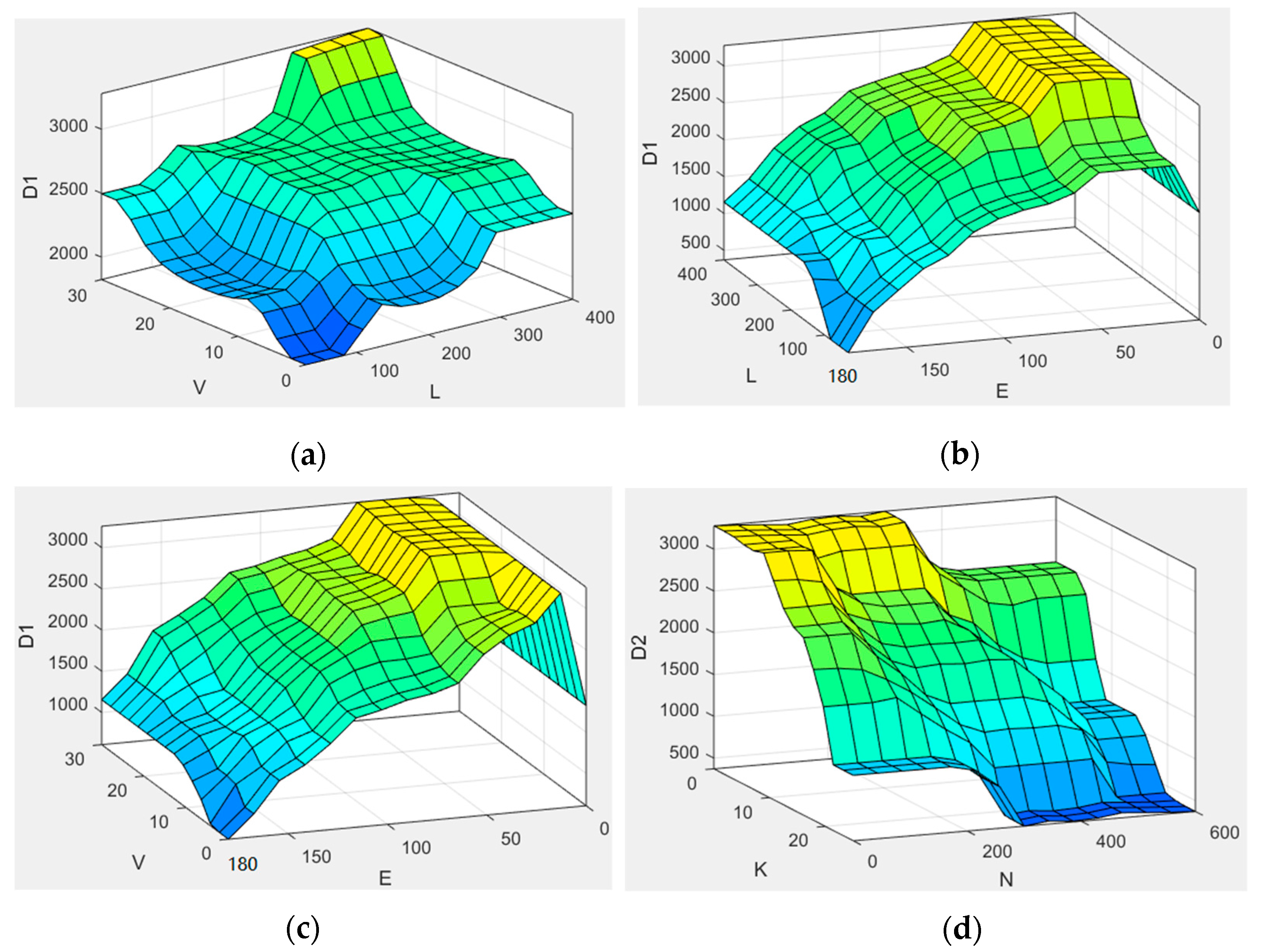
The comprehensive influence of various two-factor combinations on the size of the ship domain were also simulated, as shown in
Figure 10. The surface diagrams illustrate the trends of each set of influencing factors on the size of the ship domain as well as the specific size of the ship domain when concrete values of the two factors are input into the MATLAB simulation platform.
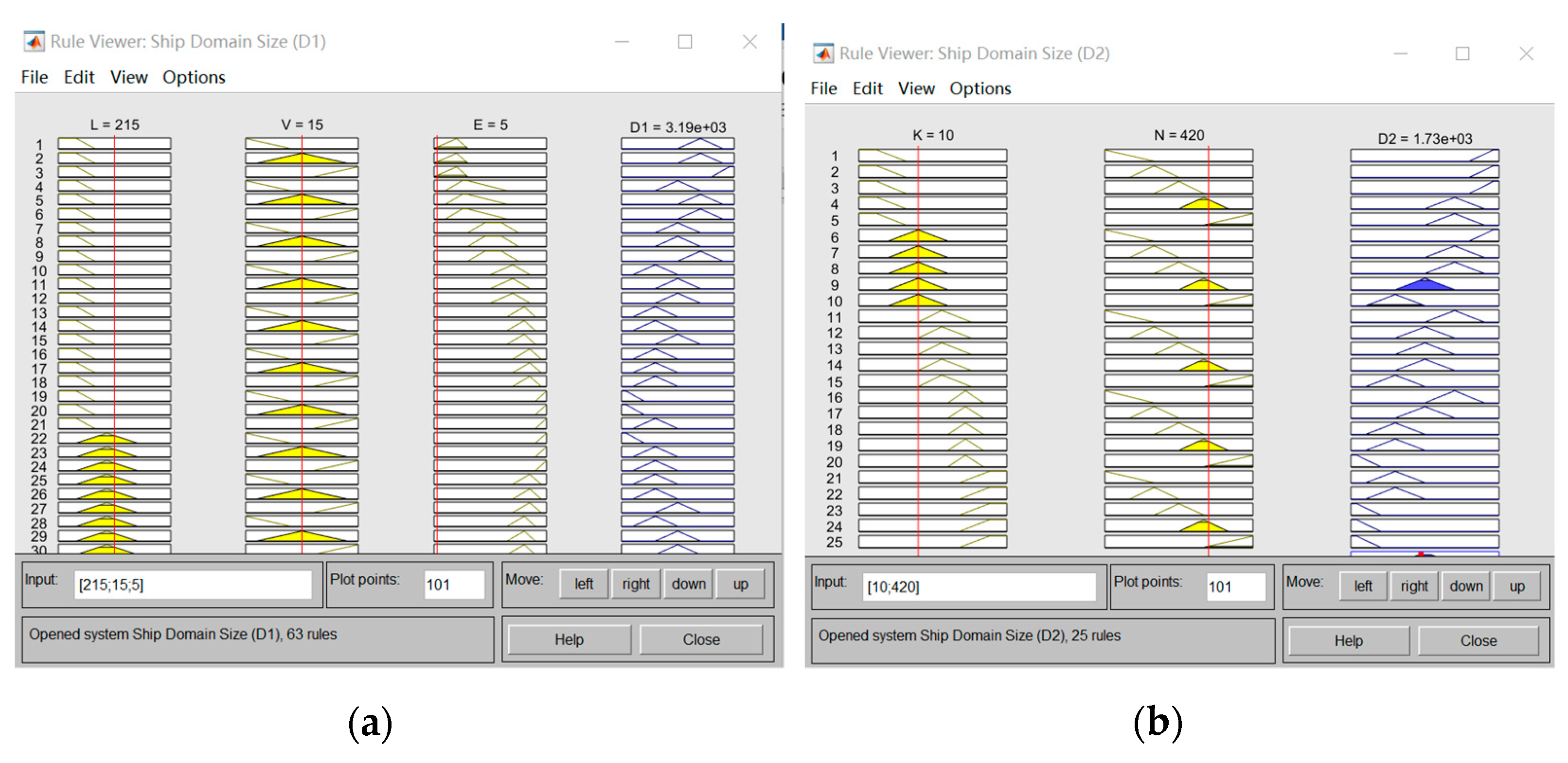
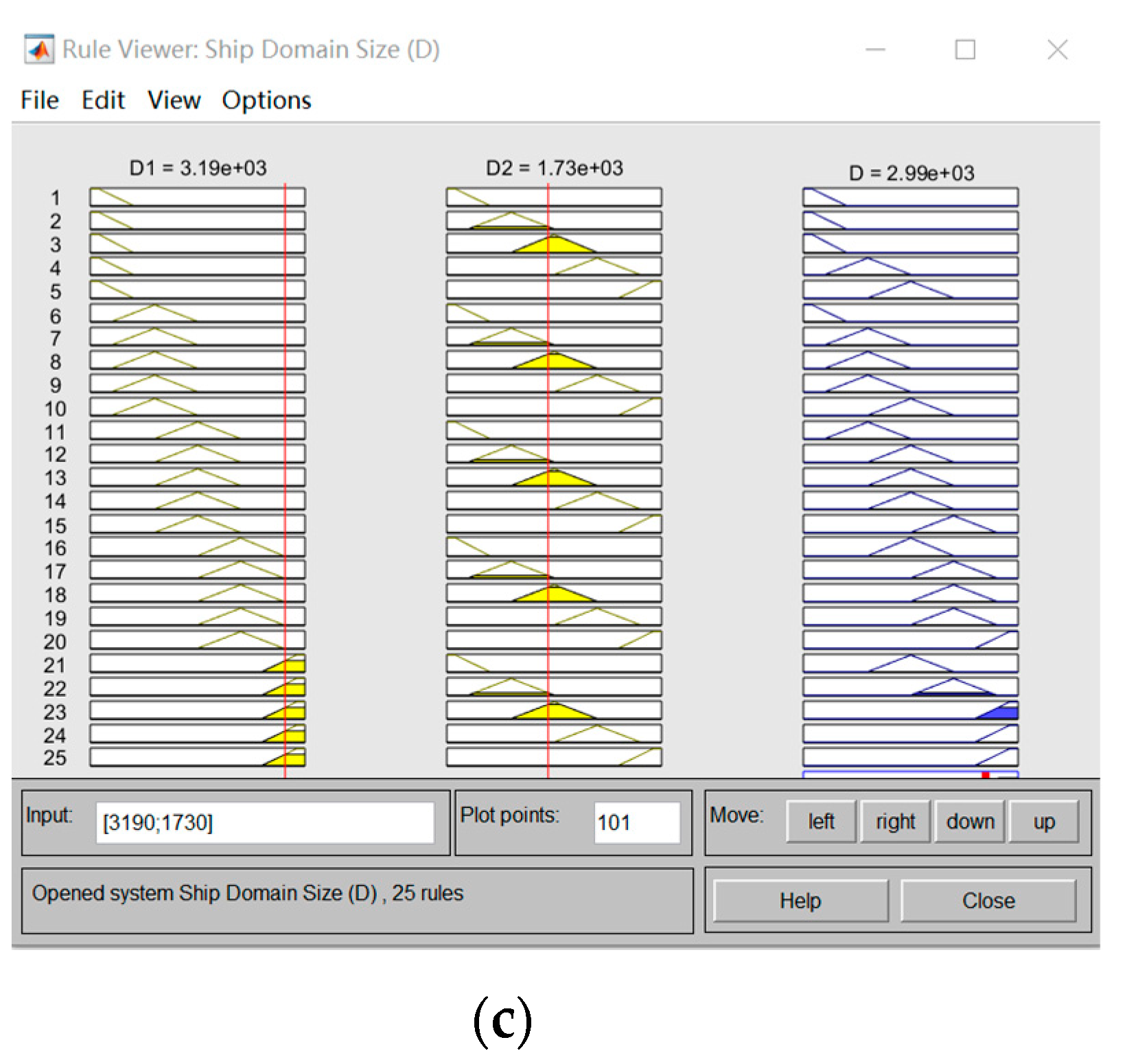
The MATLAB Fuzzy Logic Toolbox was used for simulations and the specific size of the ship domain was obtained by determining the input. The results of the fuzzy simulations are shown in
Figure 11. When specific values are assigned as inputs, i.e., the values of ship length (L), ship speed (V), encounter angle (E), navigation density (N), and fairway visibility (K) are determined, the size of the ship domain can be obtained. This article makes the simulation when two ships are in the head-on situation as an example, when the “ship length” L = 215 m, the “ship speed” V = 15 kn, the “encounter angle” E = 5, “navigation density” N = 420, and “fairway visibility” K = 10 km, and “the major axis length of the elliptical ship domain” D = 2990 m. If the ship does not encounter any other ships at this time, appropriate actions should be taken according to the length of the semimajor axis and the International Regulation for Preventing Collisions at Sea (COLREGs).
Figure 12 shows the ship domain of the own vessel and the encounter situation between the own vessel and a target vessel sailing in one direction. Taking the major axis of the ellipse as the diameter and the center of the ship as the center of the ship domain, a circle tangent to the ellipse was drawn. From
Figure 12, it can be easily observed that when the “encounter angle” E = 5, the two ships are in the head-on situation, the own vessel receives a collision risk warning when the target vessel is 1495 m away and collision avoidance actions according to COLREGs should be taken to avoid an urgent situation.
In other encounter situations, it is also possible to simulate the value of a ship domain, when other ships reach this distance and receive a collision risk warning, the sailor must consider whether or not to take action immediately. There is also a collision risk between the two ships at this time, therefore, the sailor should be on the lookout and be prepared to take measures at any time to avoid a collision. Thus, the length of the major axis of the ship domain can determine the collision risk, which can provide an early warning to help sailors in the subjective decision-making process to avoid collisions.
In the past, most ship domain models have been too complex since many factors affect the ship domain. Researchers have previously chosen to ignore certain factors while retaining more important factors based on experiential knowledge. For most situations, own ship factors such as ship length, ship speed, and encounter angle have an important influence on the size of the ship domain owing to the limitations of the single simulation method. Environmental factors are often viewed as less important and abandoned due to limitations on the number of factors required. Nevertheless, environmental factors have some influence on the ship domain. Although wind and wave have little influence, factors such as fairway visibility and navigation density have a greater impact on the size of the ship domain. Therefore, the influence of certain environmental factors on the ship domain cannot be ignored. Taking these factors into account undoubtedly reduces experimental errors in determining the size of the ship domain, which makes the ship domain a more valuable warning signal. For example, when only the ship’s own factors were considered in the present study, the ship domain size was D1 = 3190 m. In this case, the ship would receive the danger warning at 1595 m, instead of 1495 m, and take unnecessary measures to avoid collision. Premature preventive measures waste time, manpower, and material resources. Fuzzy reasoning can be used to synthesize various factors and produce more accurate simulation results, leading to fewer errors, which can save both time and unnecessary labor.
The traditional early warning methods of ship collision mainly rely on the ship’s Collision Risk Index (CRI) to complete. It refers to the possibility of collisions between ships. Generally, when CRI = 0, it means that the ship is far away from the target ship and there is no danger of collision; when CRI = 1, it means that no matter what collision avoidance actions are taken, a collision will occur between the two ships. Most studies took CRI = 0.5 as the basis of whether to take action when establishing a ship collision avoidance decision model. If CRI > 0.5, then collision avoidance action is required. If CRI < 0.5, there is no danger of collision, just lookout.
The calculation of CRI usually depends on the distance of closest point approach (DCPA) and the time of closest point approach (TCPA). Many researchers have adopted different methods to calculate CRI by input DCPA and TCPA. Some of them adopted fuzzy inference methods [
23] and some adopted fuzzy comprehensive evaluation [
24]. The calculation of TCPA and DCPA is the first thing to do. The calculation process is shown as follows.
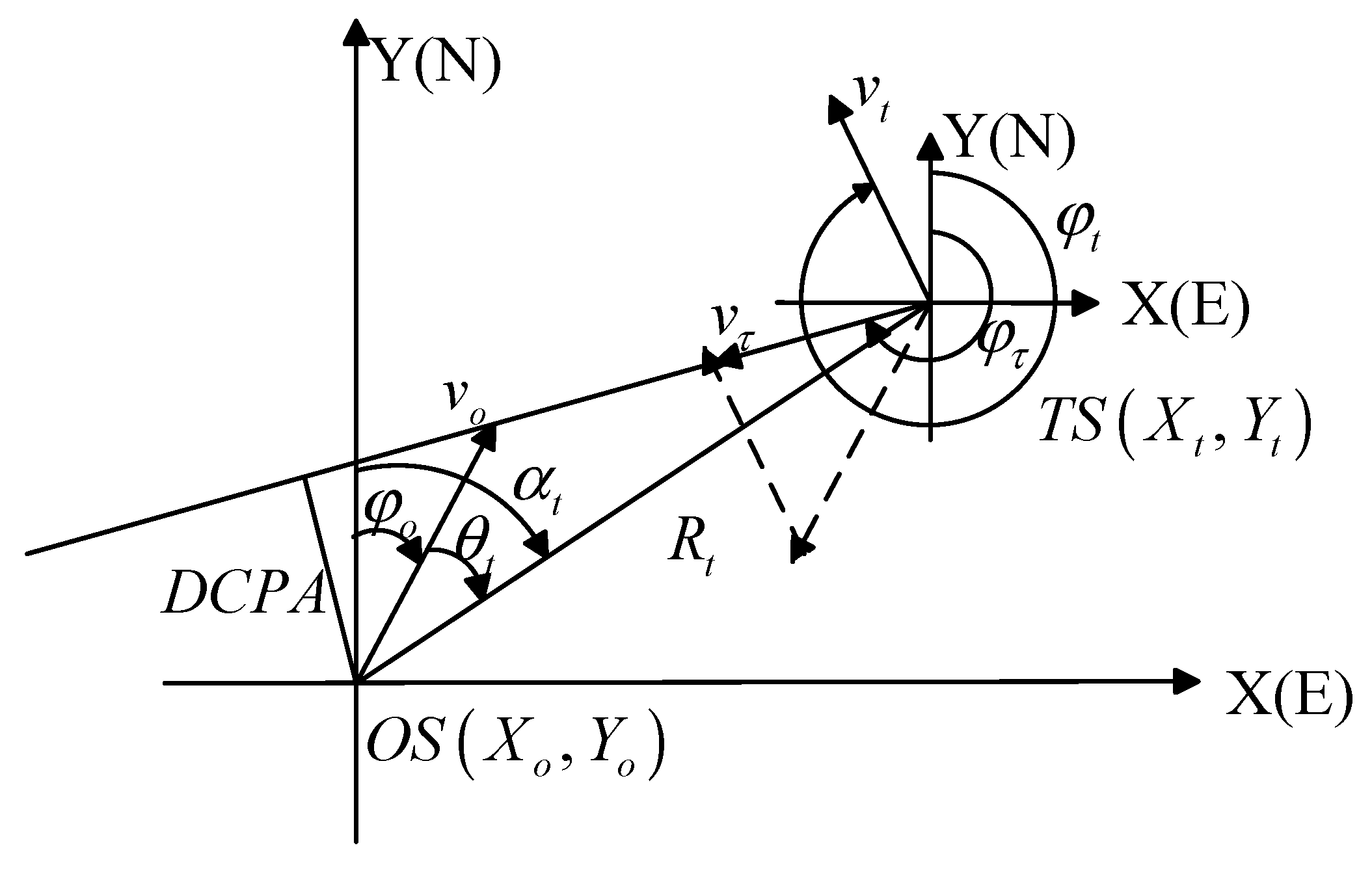
Figure 13 is a diagram of ship relative motion parameters.
where
is the relative speed of the target ship,
is the angle of the relative speed of the target ship,
is distance between two ships,
is the true position of the target ship relative to own ship. The calculation formulas are as follows.
The specific solution process will not be introduced in detail, but the calculation of the relative speed and the relative course between the two ships requires the speed and course of the own ship and the target ship. This means that adopting this method to judge the collision risk index should obtain not only the speed and course of the own ship, but also that of the target ship.
As can be seen from the article and the simulation results, when the composition fuzzy inference based on the ship domain is adopted, only the ship’s and environmental information at a certain moment need to be obtained, and there is no need to judge the status of the target ships, even static obstacles. As long as there are obstacles within the danger warning range during sailing, it will receive the collision warning and need to take avoidance actions. This makes the judgment of collision risk simpler and faster, and can also solve the limitation of judging only dynamic obstacles when judging the collision risk based on the CRI.
When judging the collision risk adopting the traditional method, the result obtained is the CRI of the target ship relative to own ship at a certain moment and position, and it can only be known whether it is necessary to take action at this time. However, the collision risk distance of the ship at a certain moment is obtained by the composition fuzzy inference. The method is more intuitive, more applicable, and has a certain predictability, which can give the sailor more reaction time.
At the same time, the data provided by the AIS system required by the traditional method does not contain environmental factors, and to a certain extent the impact of environmental factors on ship collisions is ignored. The composition fuzzy inference method has smaller errors.
The comparison table between composition fuzzy inference and traditional methods is shown in
Table 4.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}