1. Introduction
Ships may encounter various types of dangers at sea; for instance, list due to stranding or hull damage due to collision. The Ro-Ro ship Modern Express underwent an accident in 2016, and floated at sea for more than one week with a list angle of 51 degrees. Compared to ships floating in the upright position, the hydrostatic load acting on a damaged ship is very different. When a ship is in a listed position, the horizontal bending moment, in addition to the vertical bending moment, must be also considered in the body-fixed coordinate system. If the ship hull is also damaged, the strength of the hull girder will be impaired, and the ship will be in a more dangerous situation. Researches have shown that the horizontal load acting on a damaged ship may be as large as 1.73 times the vertical load [
1,
2]. For this reason, the assessment of ship strength is more than just about dealing with the vertical bending moment; in fact, the ultimate limit state function of the ship under the action of combined loads must be assessed.
To investigate the ultimate limit state function, the ultimate strength must be calculated first. The existing methods for calculating the ultimate strength of the hull girder can be categorised into two groups: analytical methods and progressive collapse methods [
3]. The analytical methods include the elastic analysis method (such as the initial yielding bending moment method) and fully plastic bending moment method (Caldwell’s method [
4]). The practices show that these methods are useful for predicting the ultimate strength and residual strength of the hull girder in the early design stage. Based on investigations of the collapse procedure of a ship undergoing the bending moment of a hull girder, some progressive collapse analysis methods have been proposed, such as nonlinear finite element analysis (including the Idealised Structural Unit Method) [
5,
6] and Smith’s method [
7]. The nonlinear finite element analysis, which can simultaneously consider yielding, buckling and the mixed failure behaviour of structural elements constituting the hull girder, is recognised as the most reliable approach for calculating the ultimate/residual strength. However, its application is limited due to the huge modelling and computing time, and also the requirement of the engineer’s experience [
8,
9]. Meanwhile, a progressive collapse method was proposed by Smith [
7], by which, the cross-section of concern is discretised into units of stiffened panels, then the curvature of the hull girder is increased step by step, and the nonlinear behaviour of each unit is obtained by analysing its stress–strain relationship so as to obtain the section bending moment at different curvatures of the hull girder. This method has been widely used in the community, and is referred to as the Smith Method [
10]. Hence, the simplified progressive collapse method is adopted for the ultimate strength analysis in this study.
The accuracy of the Smith Method relies on the stress–strain relationship and the calculation of the neutral axis. There exist quite a few researches on the stress–strain relationship. Hughes et al. [
11] investigated the failure behaviour of various types of stiffened panels using an incremental iteration method, and the comparison with experiment showed fair accuracy. Yao [
12] derived the stress–strain relationship for the coupled flexural–torsional behaviour of angle bar stiffeners. HCSR [
10] also provided various stress–strain relationships for the calculation of the ultimate strength of hull girders. However, the relationships provided by HCSR were derived using the compression and tension equilibrium in the structure above and below the neutral axis that is parallel to the water line, and they cannot be applied to asymmetric cross-sections due to inclination and/or hull damage. In the case of an asymmetric stress–strain, the neutral axis does not only translate, but also rotate. Fujikubo et al. [
13] found that the influence of the rotation of the neutral axis on the accuracy of residual strength may be as large as 8%. In order to account for the rotation, Joonmo et al. [
14] proposed a force vector equilibrium method where both the force and moment at the cross-section are in equilibrium.
Although theoretically, the instantaneous position of the neutral axis can be accurately determined by the equilibrium both in force and force vector, a proper numerical method is required for the convergence of a solution. Li et al. [
15] proposed a linear search method to obtain the solution. However, the translation and rotation are dealt with separately in the iteration process, and certain experience is needed to obtain reasonable results.
The solution to the instantaneous position of the neutral axis is a problem of seeking the optimum solution, and for which there exist a number of algorithms, such as Particle Swarm Optimisation (PSO) [
16], ant colony optimisation [
17], genetic algorithm [
18] and simulated annealing [
19]. Among these algorithms, the PSO algorithm was inspired by the social behaviour of bird swarms. Massless and volumeless particles are adopted to represent individuals of the swarm, and each individual is a solution. The motion of each of these particles obeys a simple law, and the global optimum solution is searched in the solution space, accounting for the influences between the particles. This algorithm is widely applied in many engineering areas for its simple implementation, fast convergence, and excellent accuracy. Li et al. [
20] applied the PSO algorithm to trace the instantaneous position of the neutral axis, and both the translation and rotation are dealt at the same time. Comparison of results showed that the accuracy is satisfactory.
Among the researches on the fitting of ultimate limit state function under multiple loads, mostly the combined load of vertical and horizontal bending moments [
21,
22,
23], the following fitting equation is often used.
where
,
,
and
are the fitting parameters of the function;
and
the vertical and horizontal bending moment of the ship in the ultimate state, respectively;
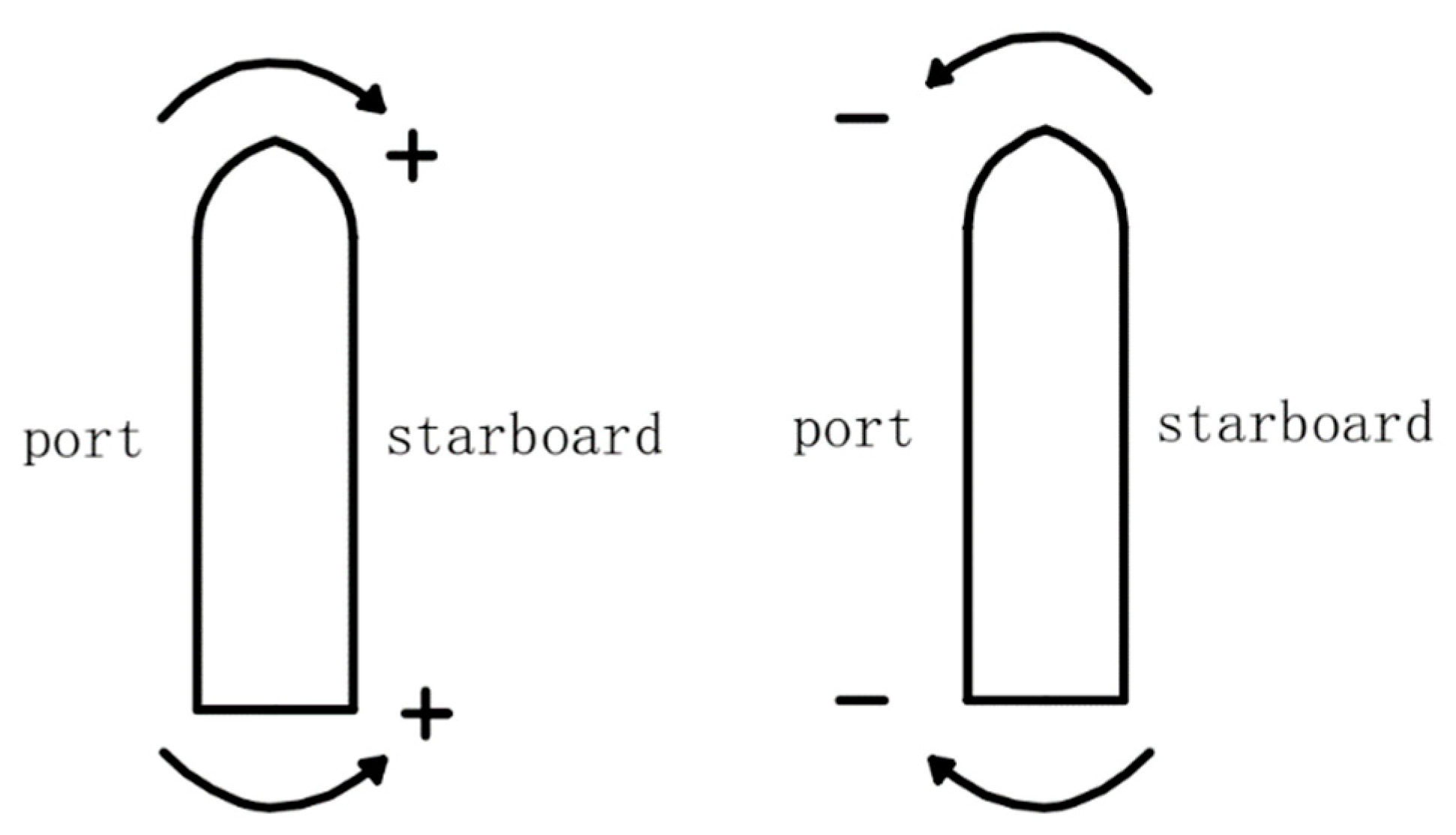
the ultimate vertical bending moment when the ship is in a sagging or hogging state; and
the ultimate horizontal bending moment when included to port or starboard. These parameters vary from one to another, and
Table 1 shows some of them used by researchers for intact ships.
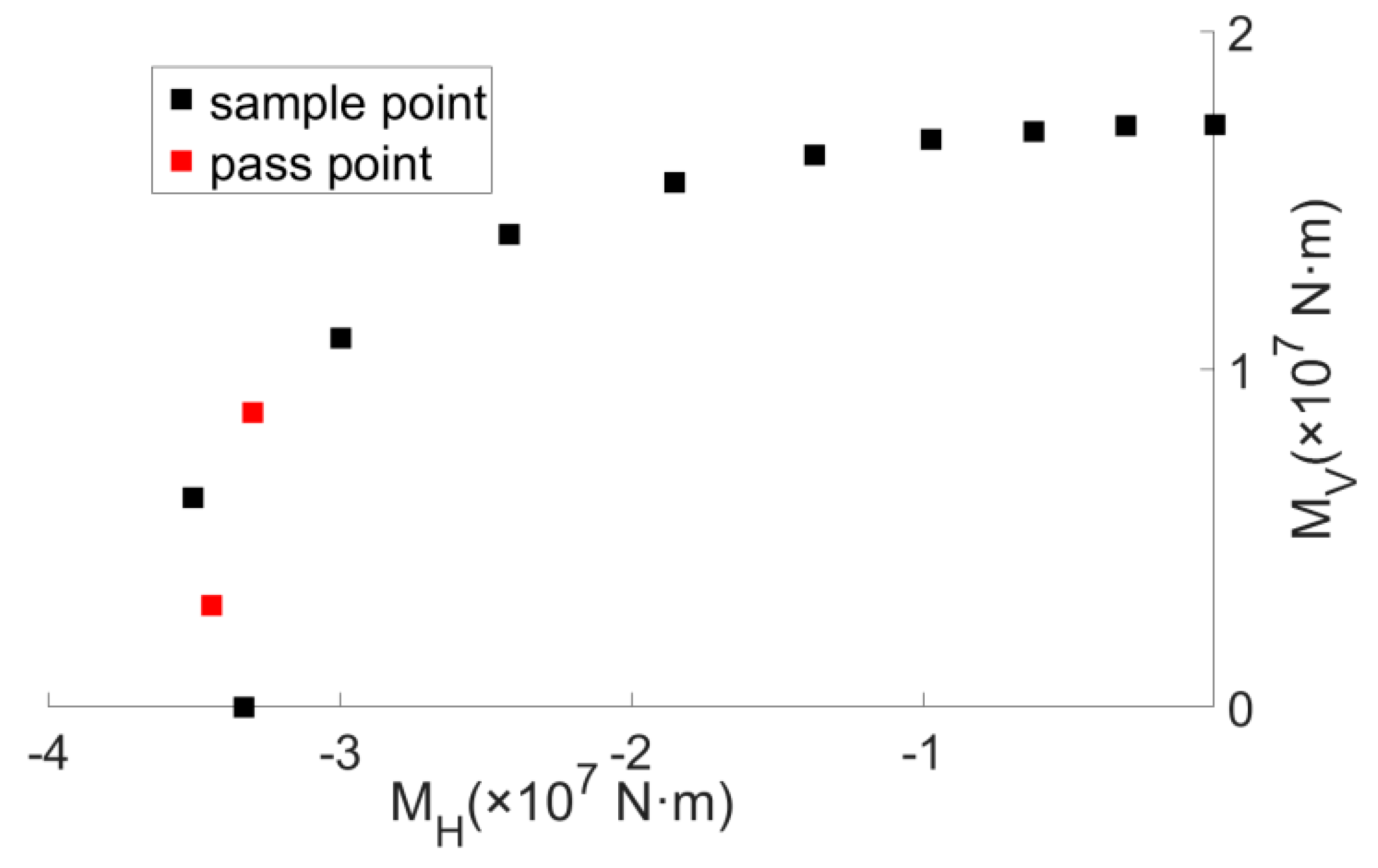
It can be seen in
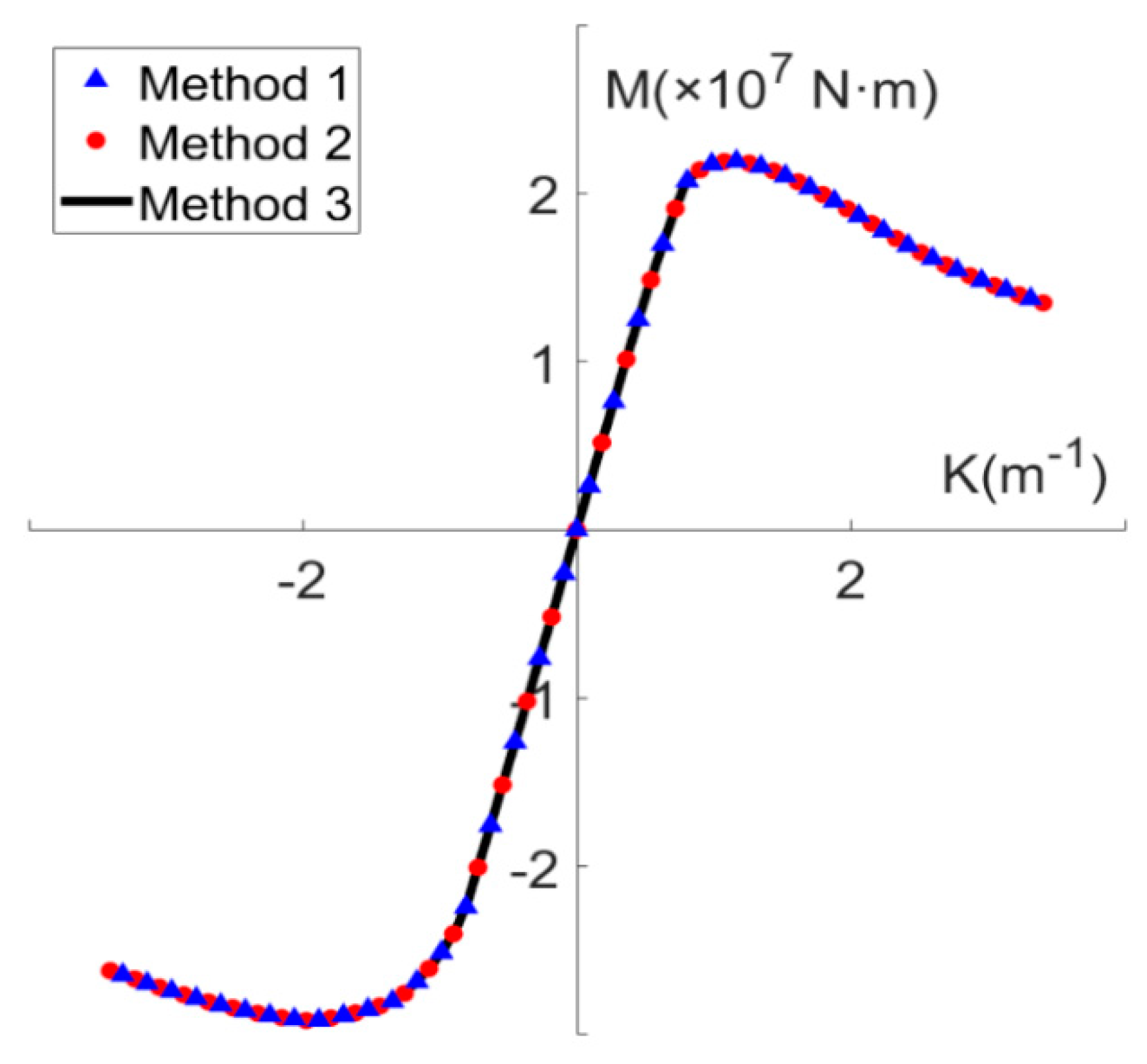
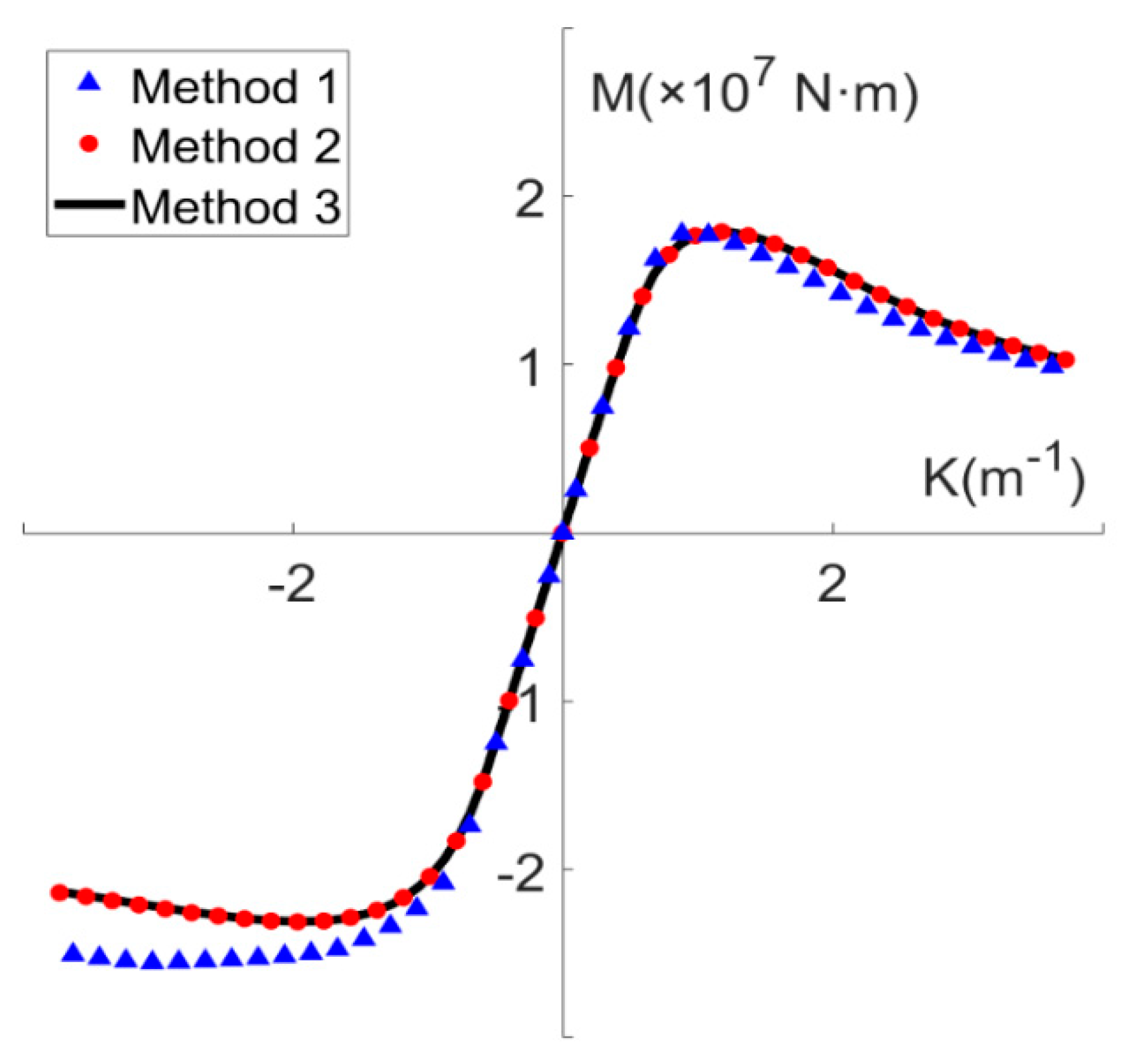
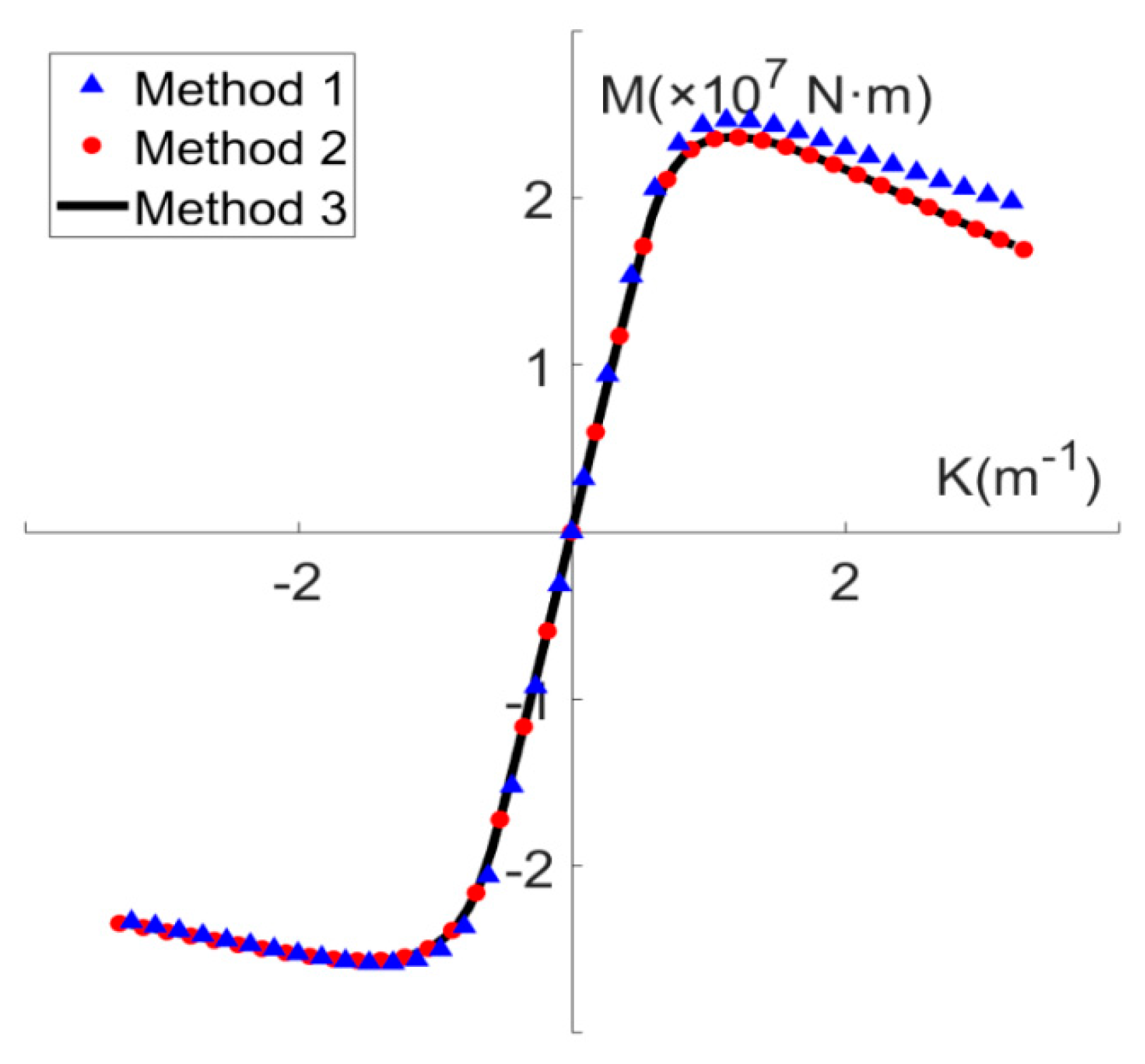
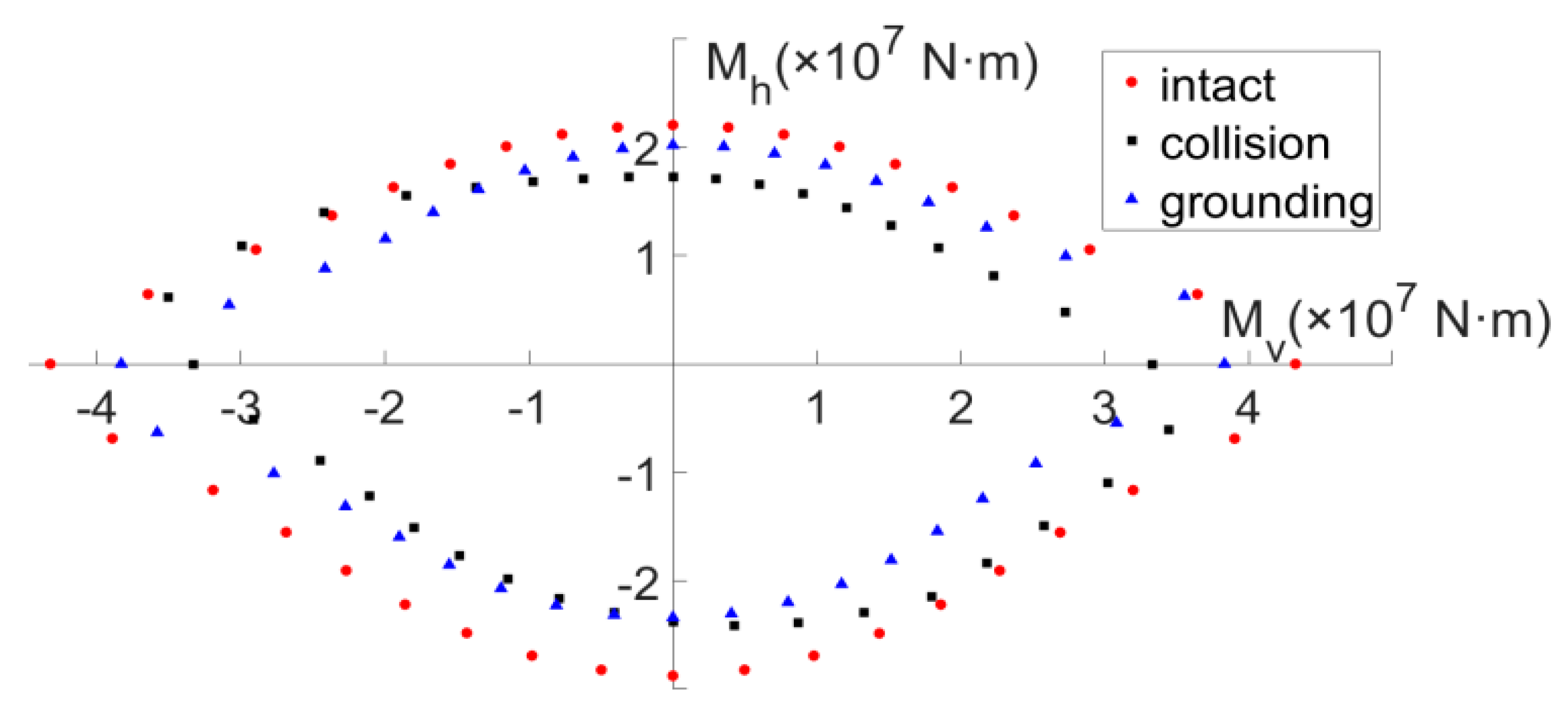
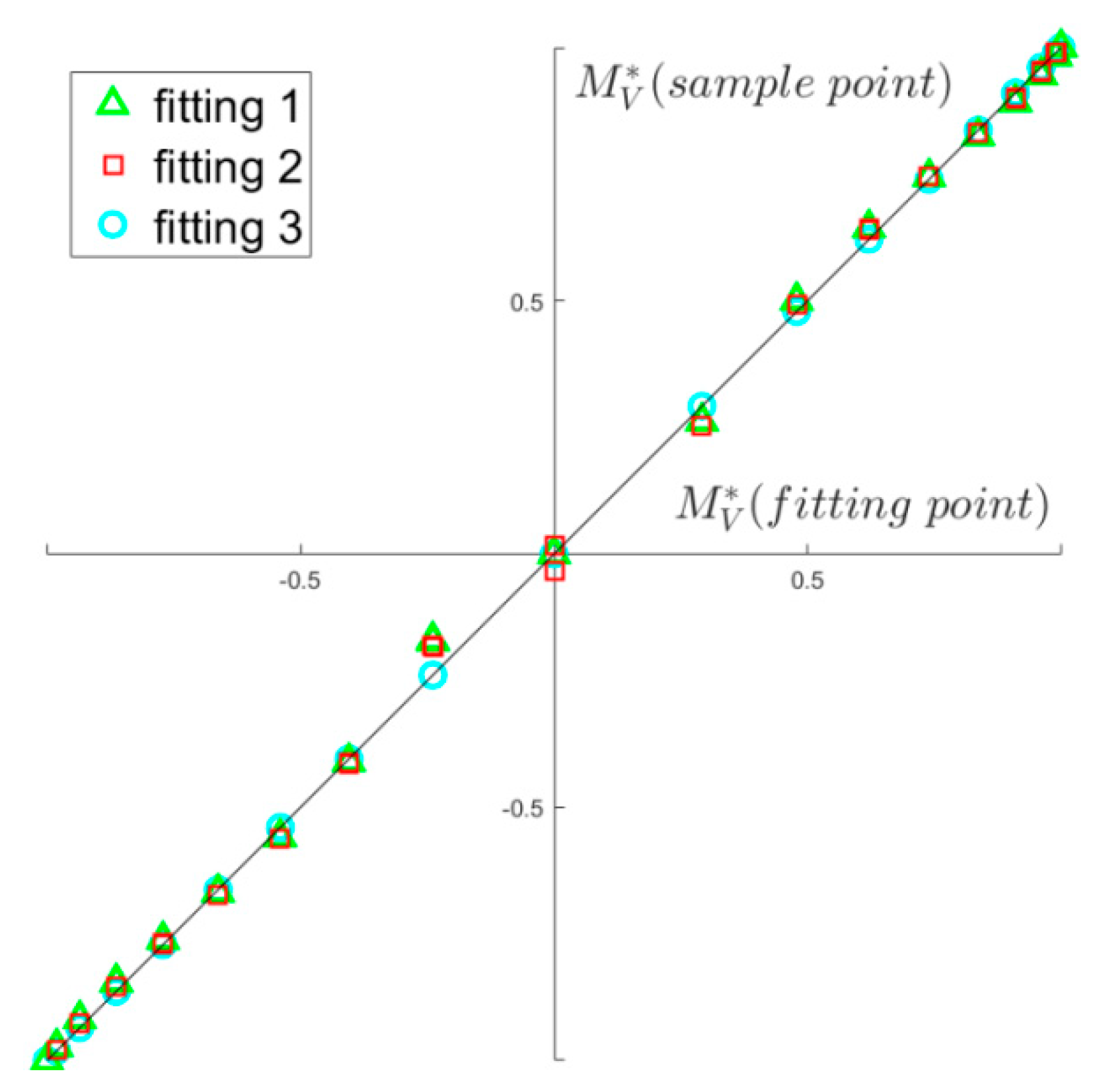
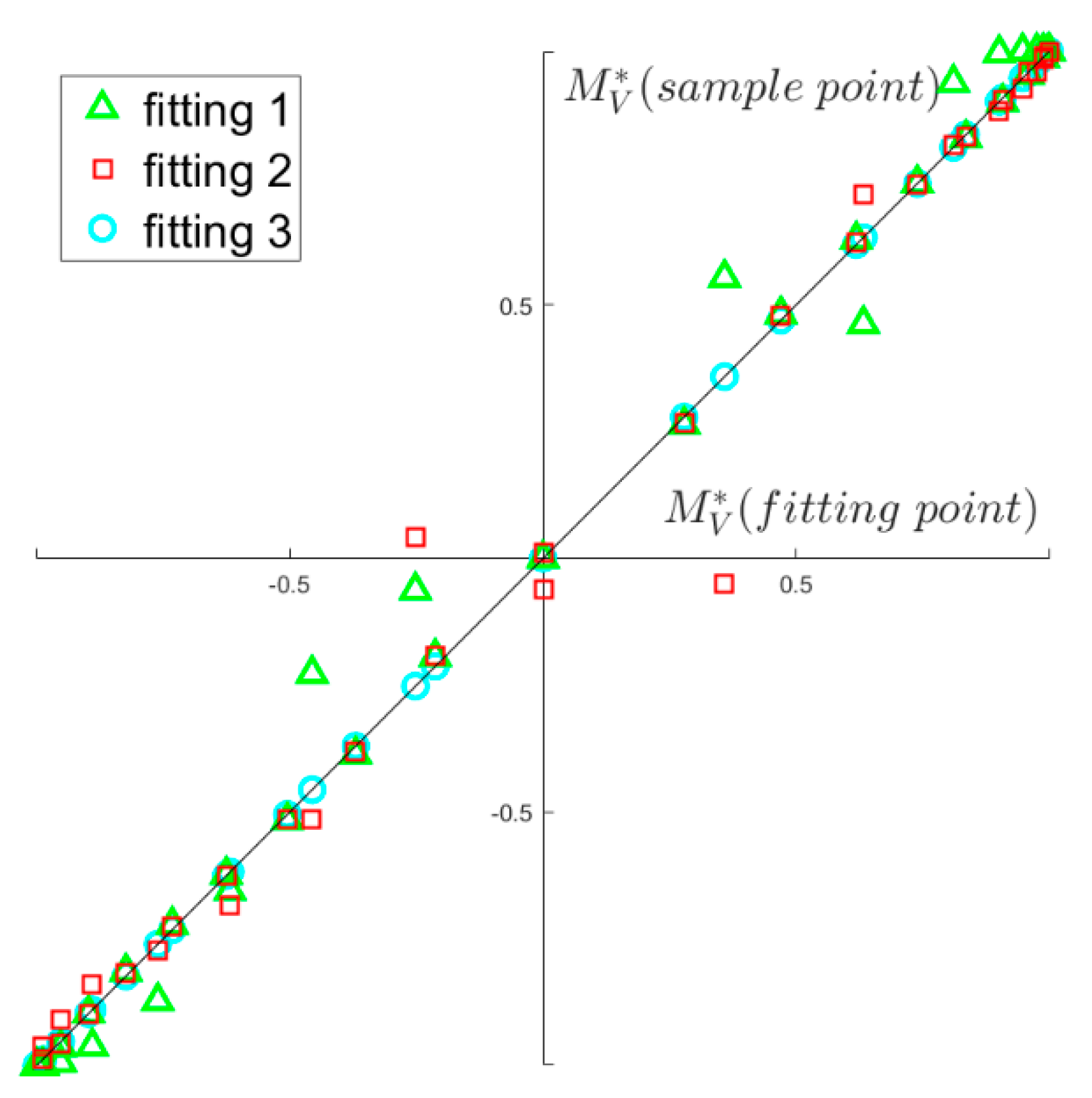
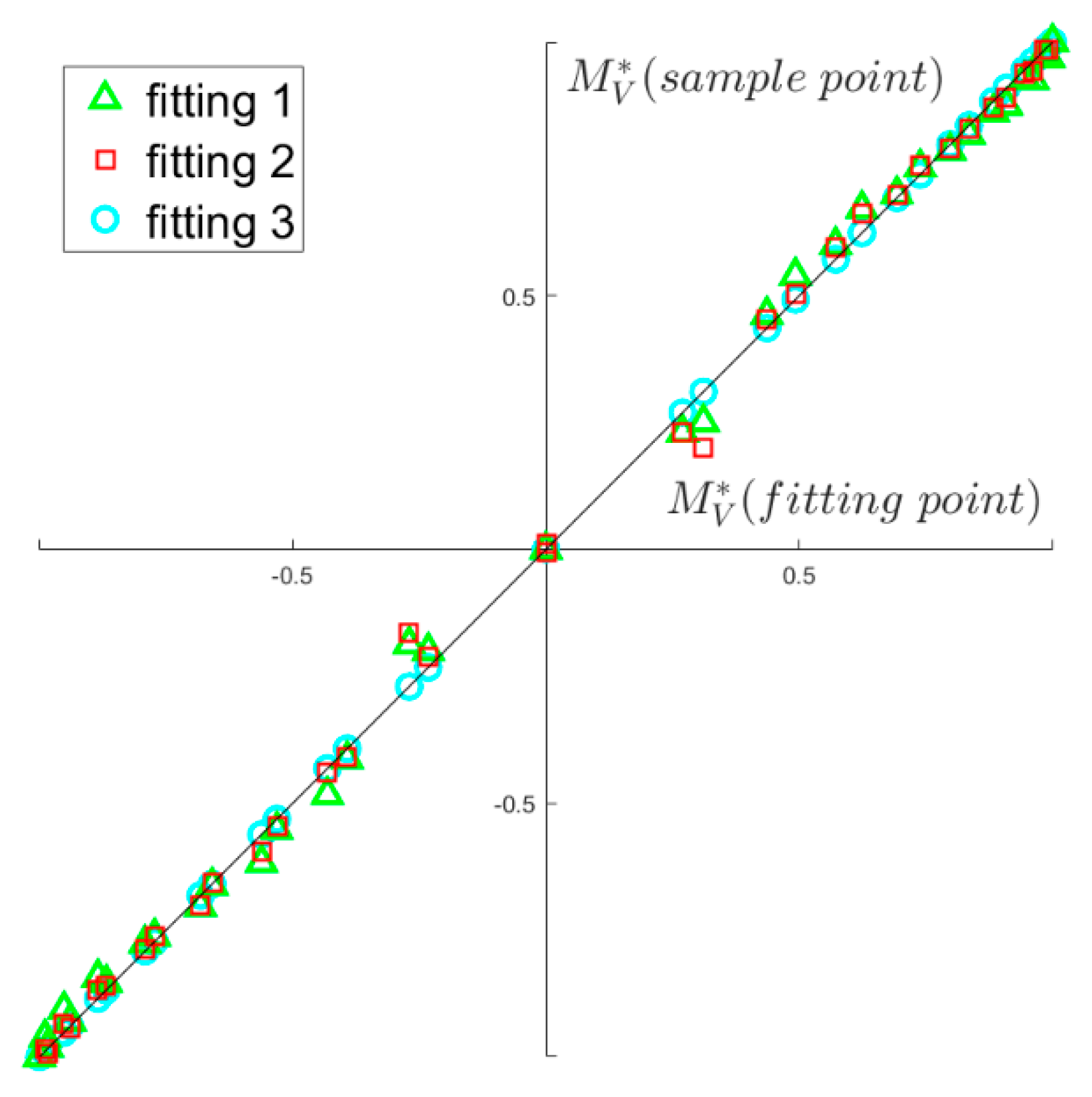
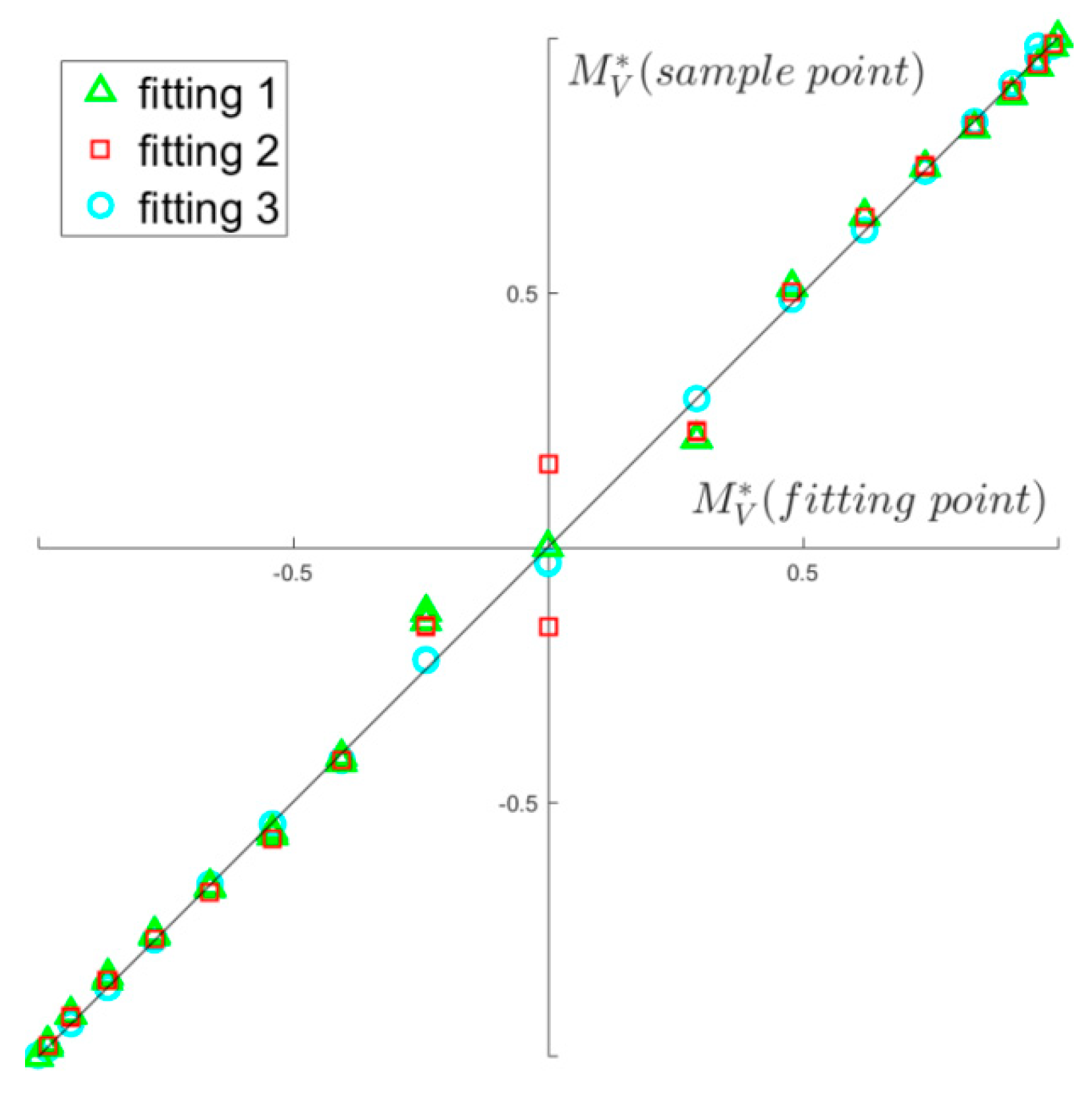
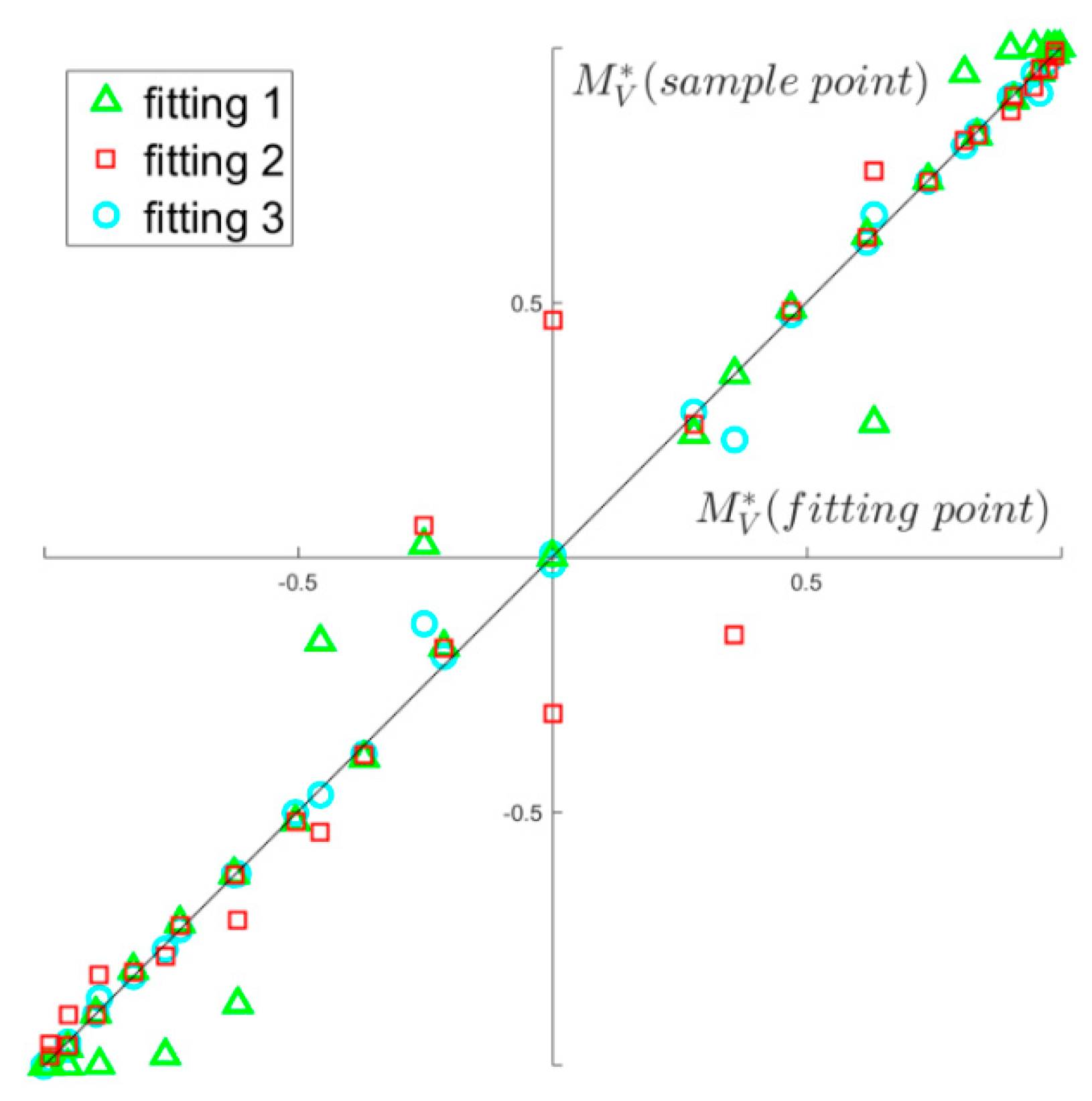
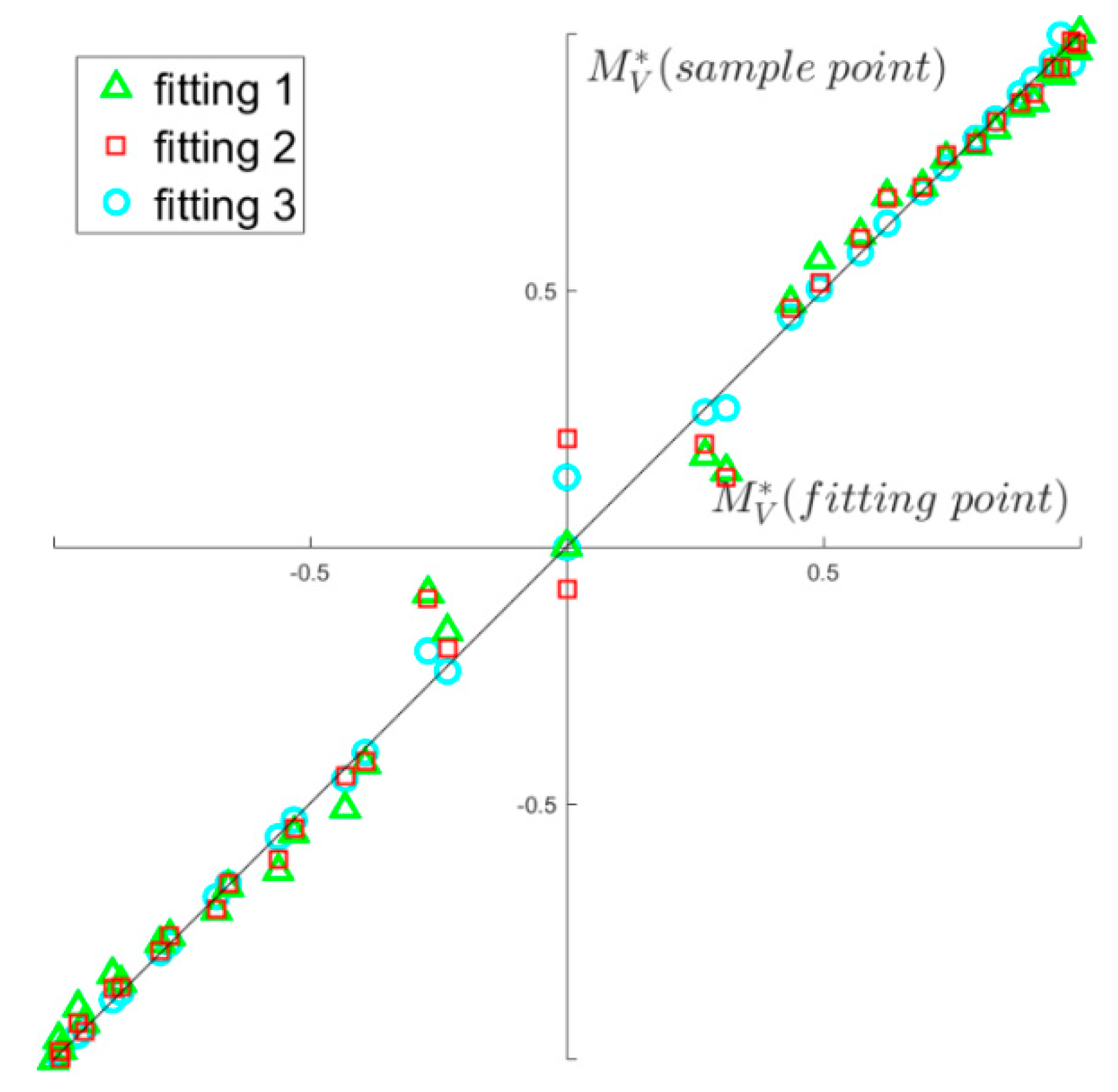
Table 1 that attempts have been made to obtain a function to describe the coupling relationship between the two bending moments. The fitting is satisfactory when the samples of bending moments bear a negative relationship with the absolute values; however, if the samples bear a positive relationship, it will be very difficult to obtain a fitting function with desired accuracy, as shown in
Figure 1, where the trend of the samples starts to change when approaching the
axis, and increasing the number of samples is of little help, as shown in
Figure 1.
In order to improve the fitting accuracy of ultimate limit state function, Shahid [
24] proposed a polynomial fitting method for the case of damaged ships. The polynomial fitting method achieves a quadratic fitting function using multivariable regression. However, it has been shown that there are still some errors in the results obtained with this method. Thus, a new fitting method is desired to accurately describe the relationships between the vertical and the bending moment.
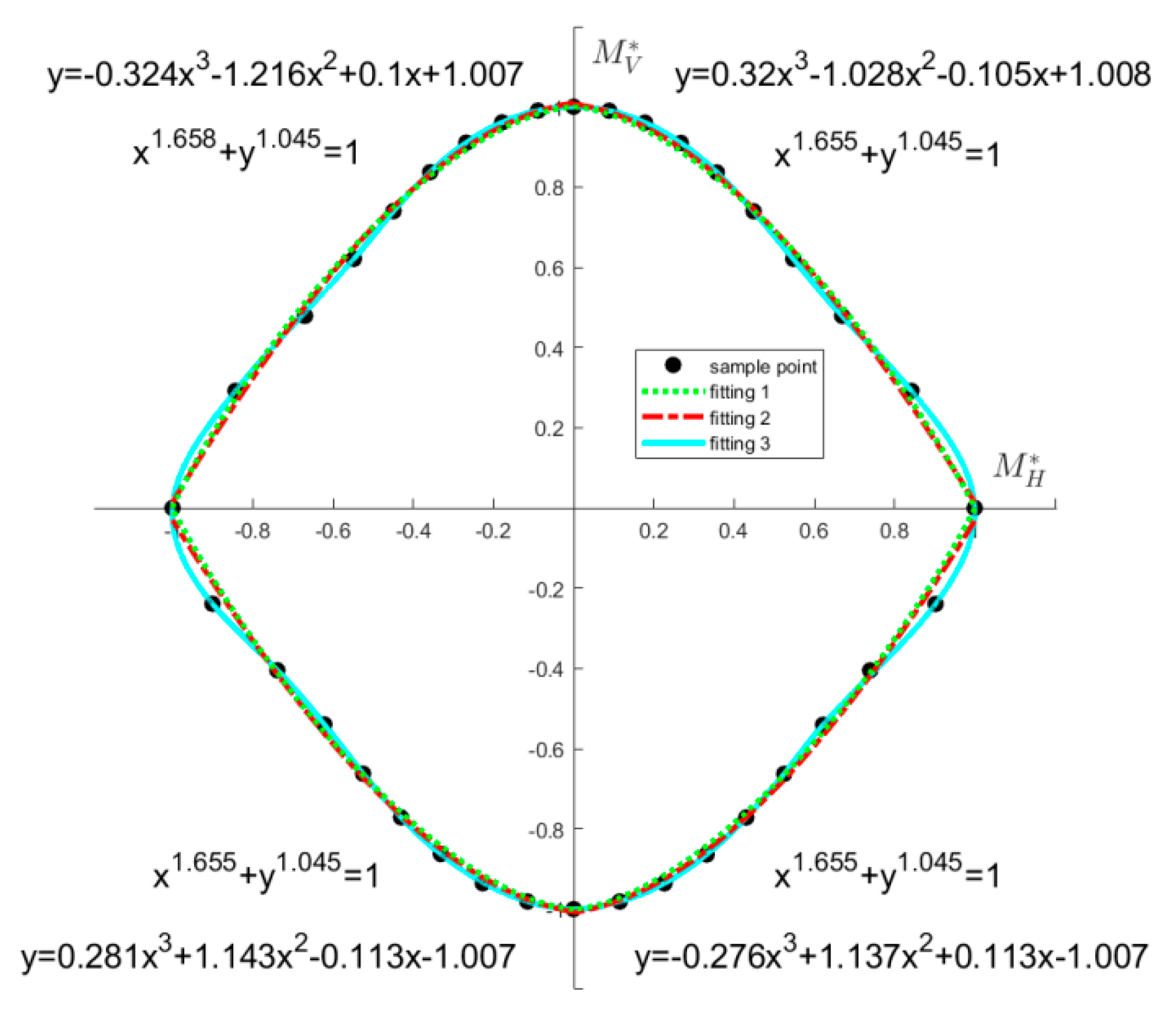
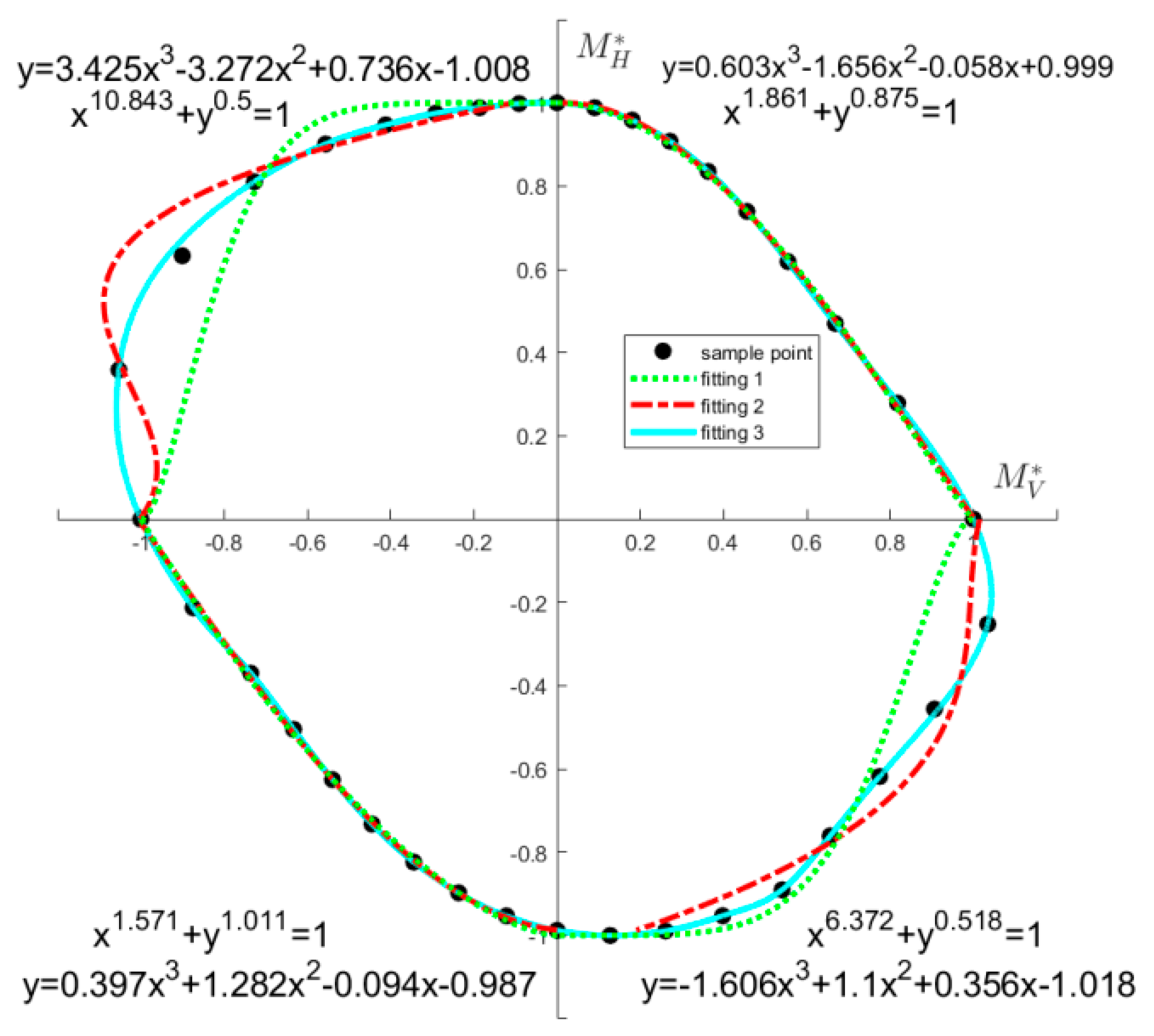
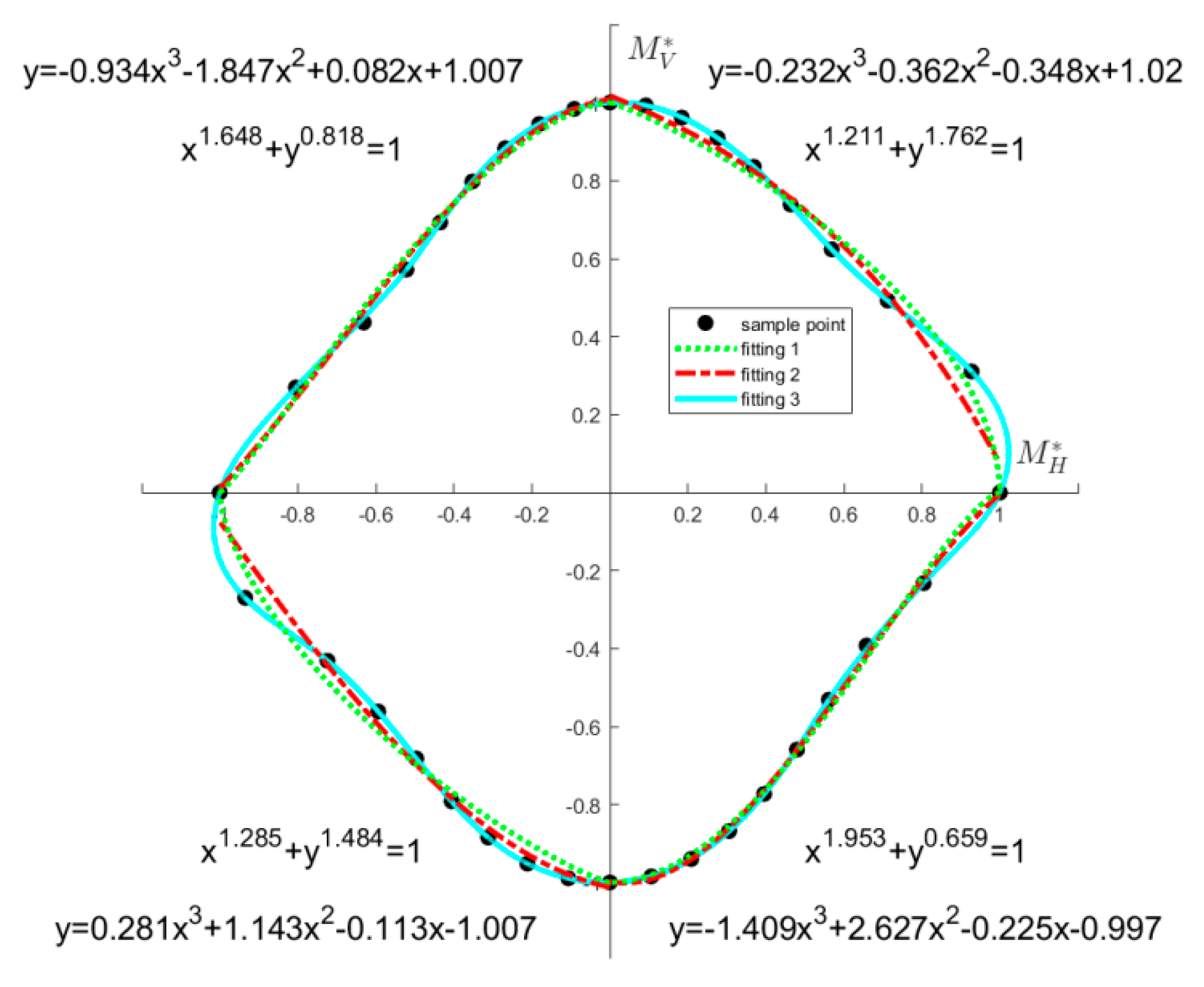
In this study, in order to derive a simple but accurate fitting method, the accuracy of the polynomial fitting method is improved by the means of a piecewise weighted least squared method. With this method, the sample points are divided into groups and fitted separately, then these functions are adjusted by ensuring the continuity at the boundaries, and finally a set of explicit fitting functions are obtained.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}