Manoeuvrability of a Large Cruise Ship after Damage for Safe Return to Port


Abstract
:1. Introduction
2. Experimental Condition
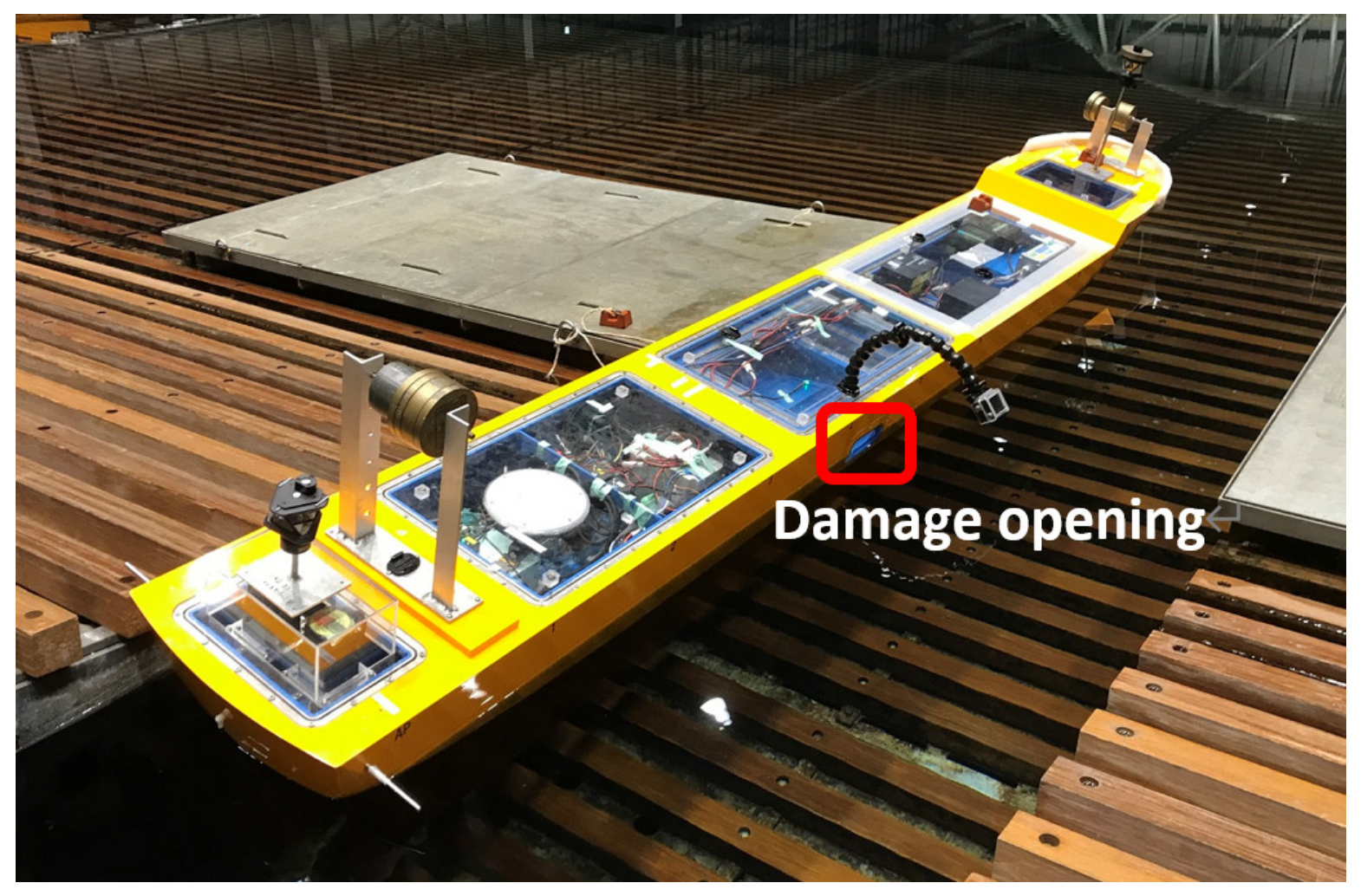
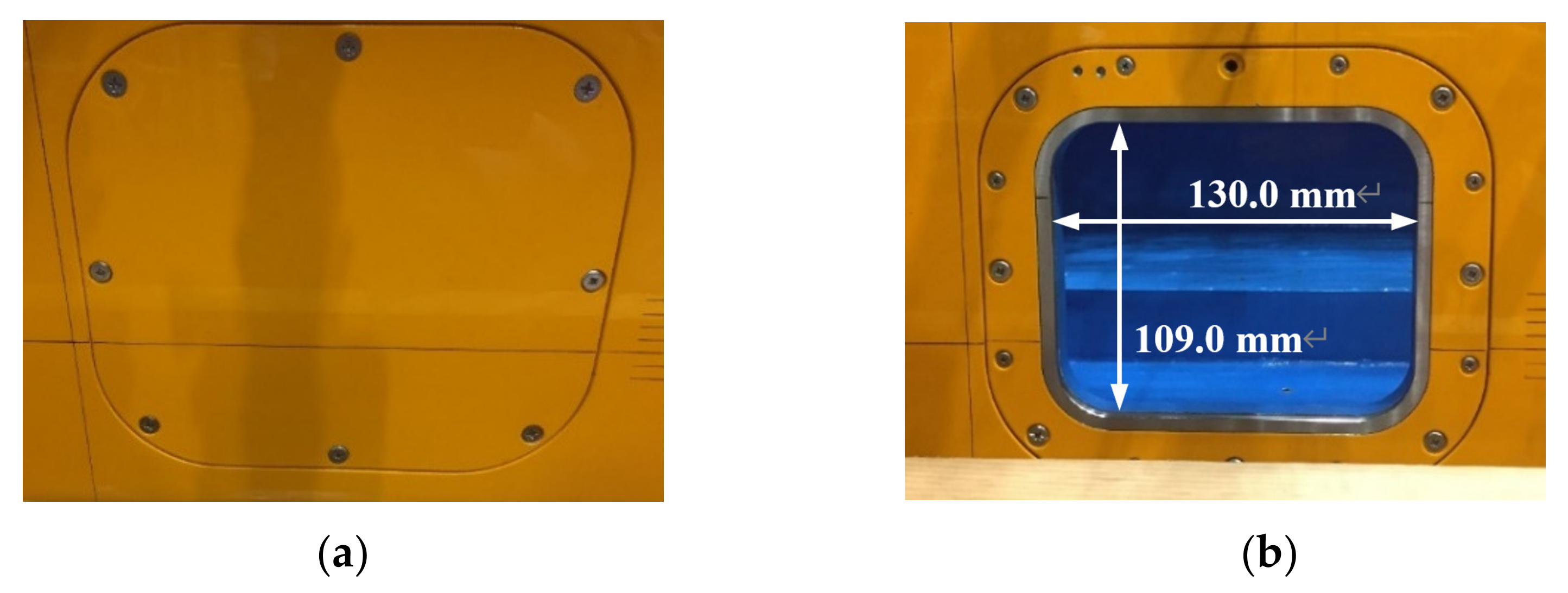
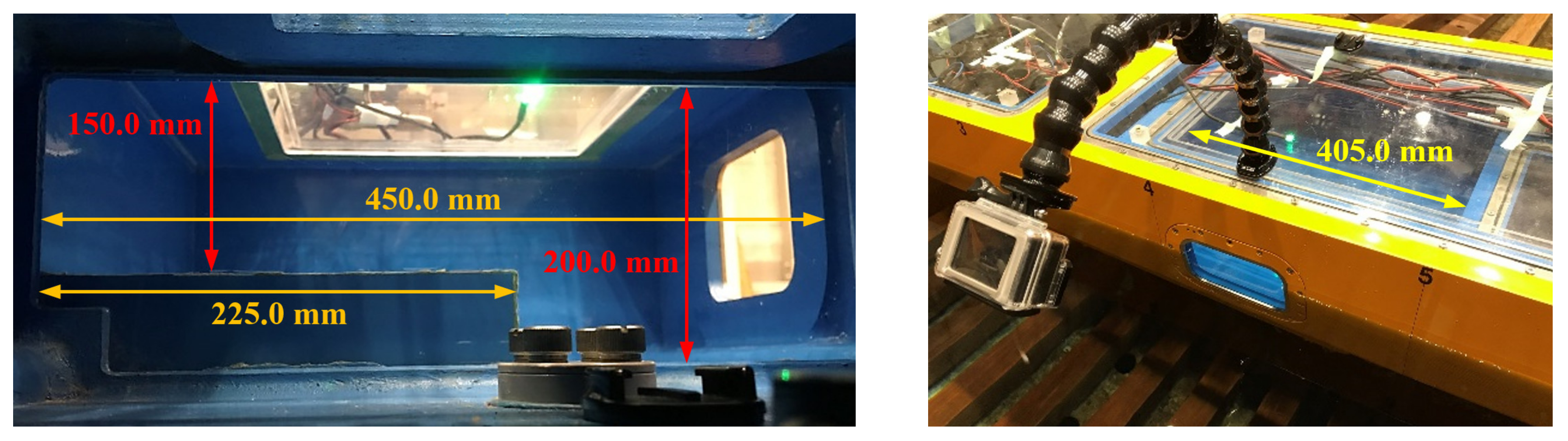
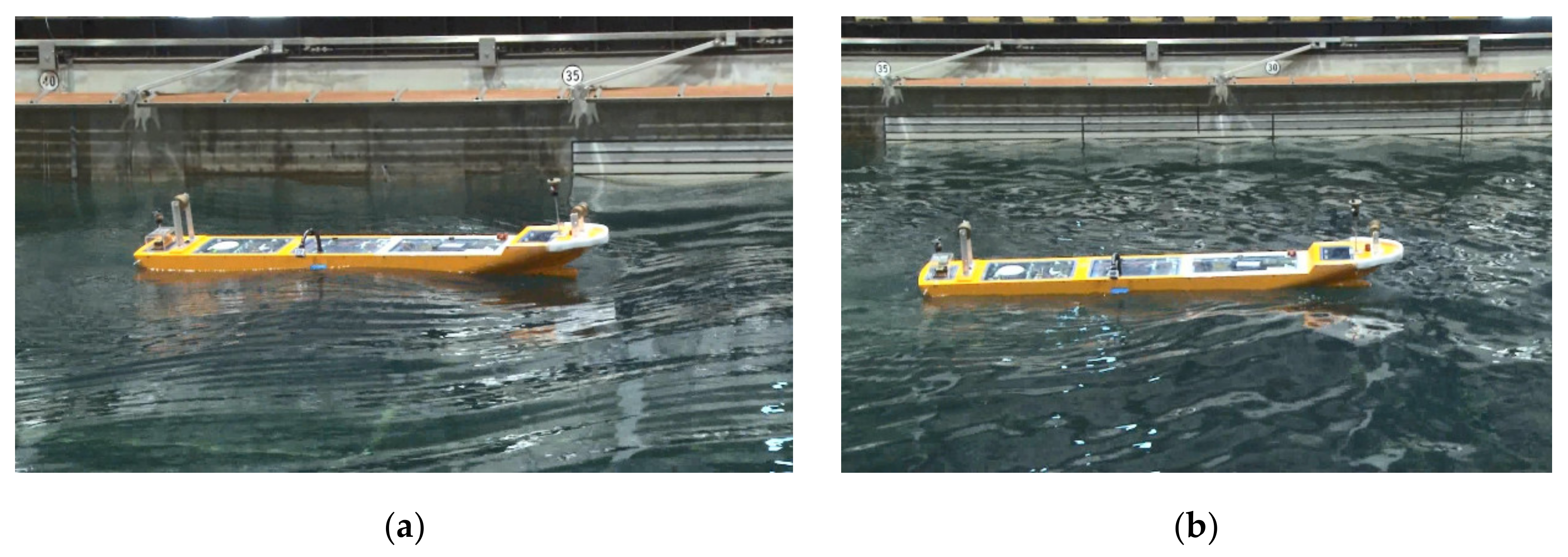
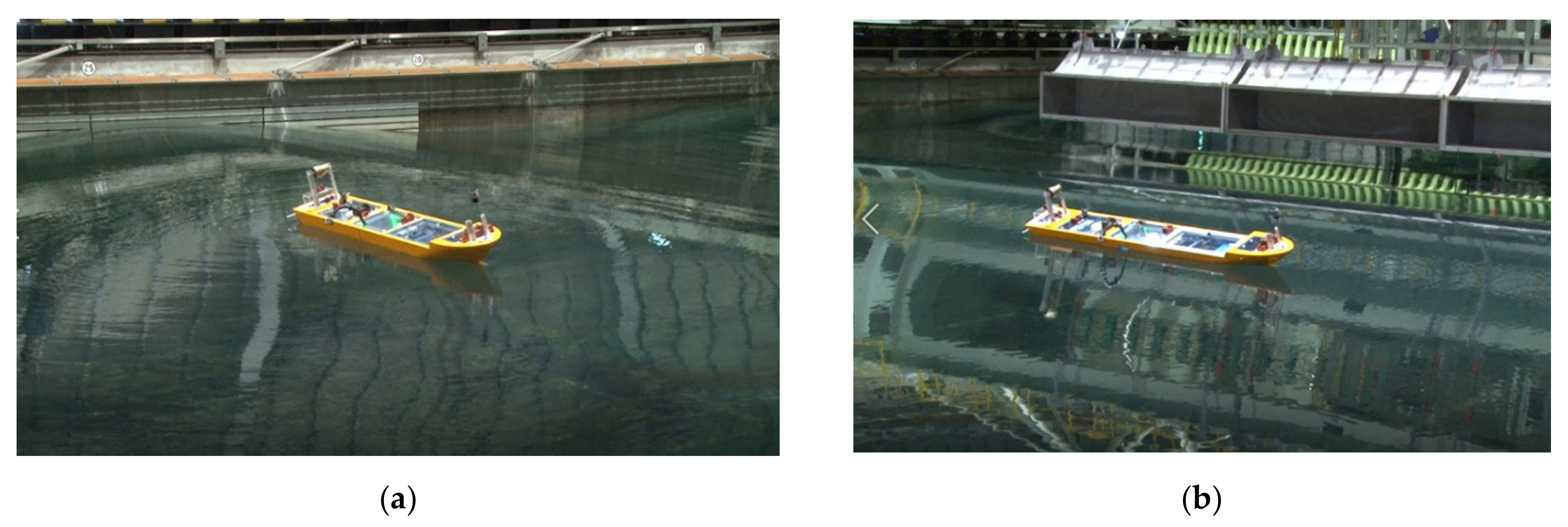
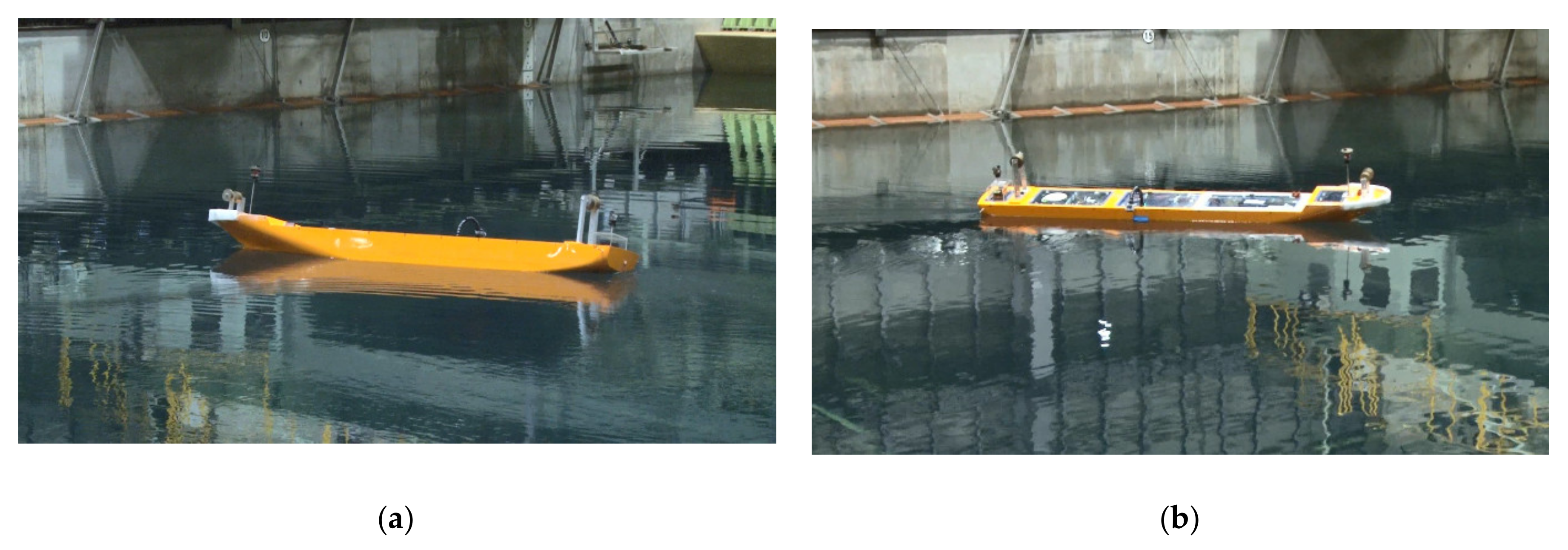
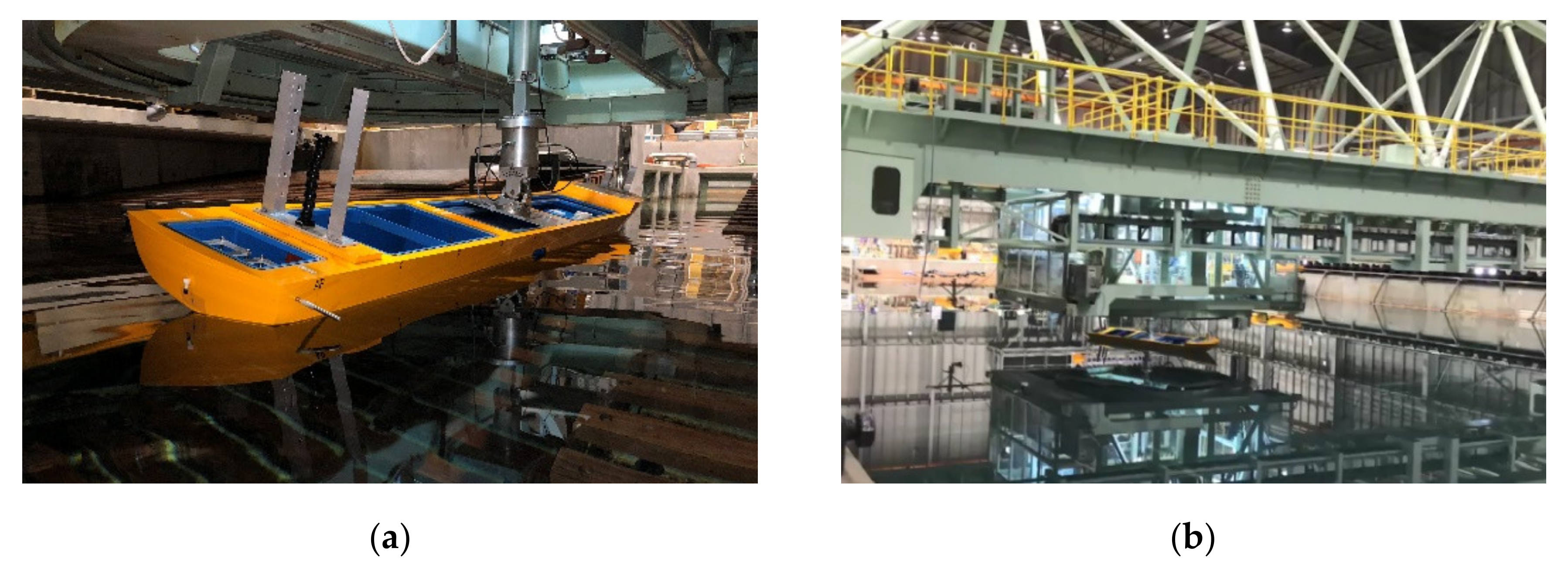
2.1. Ship Model
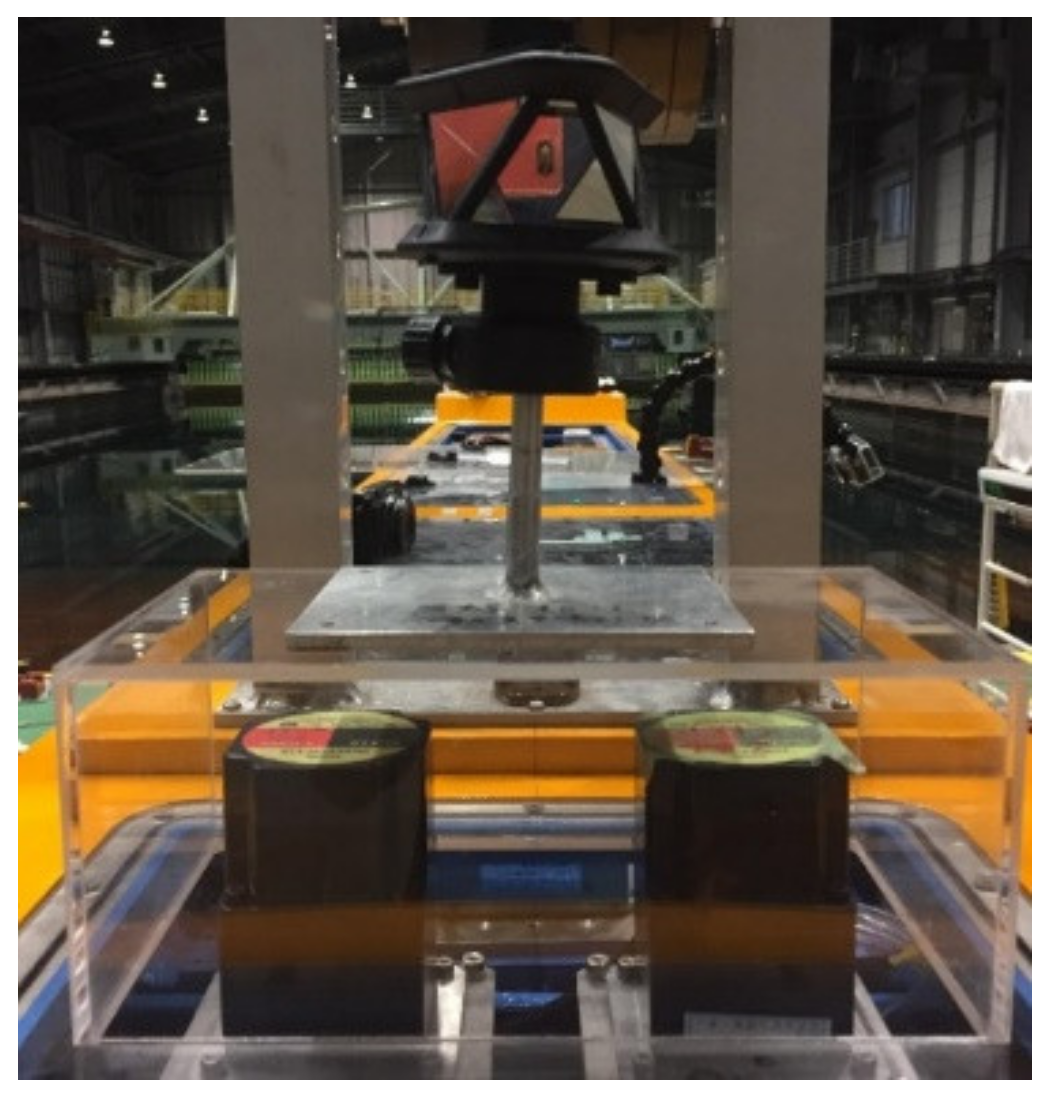
2.2. Experimental System
2.3. Experimental Condition
3. Experimental Results
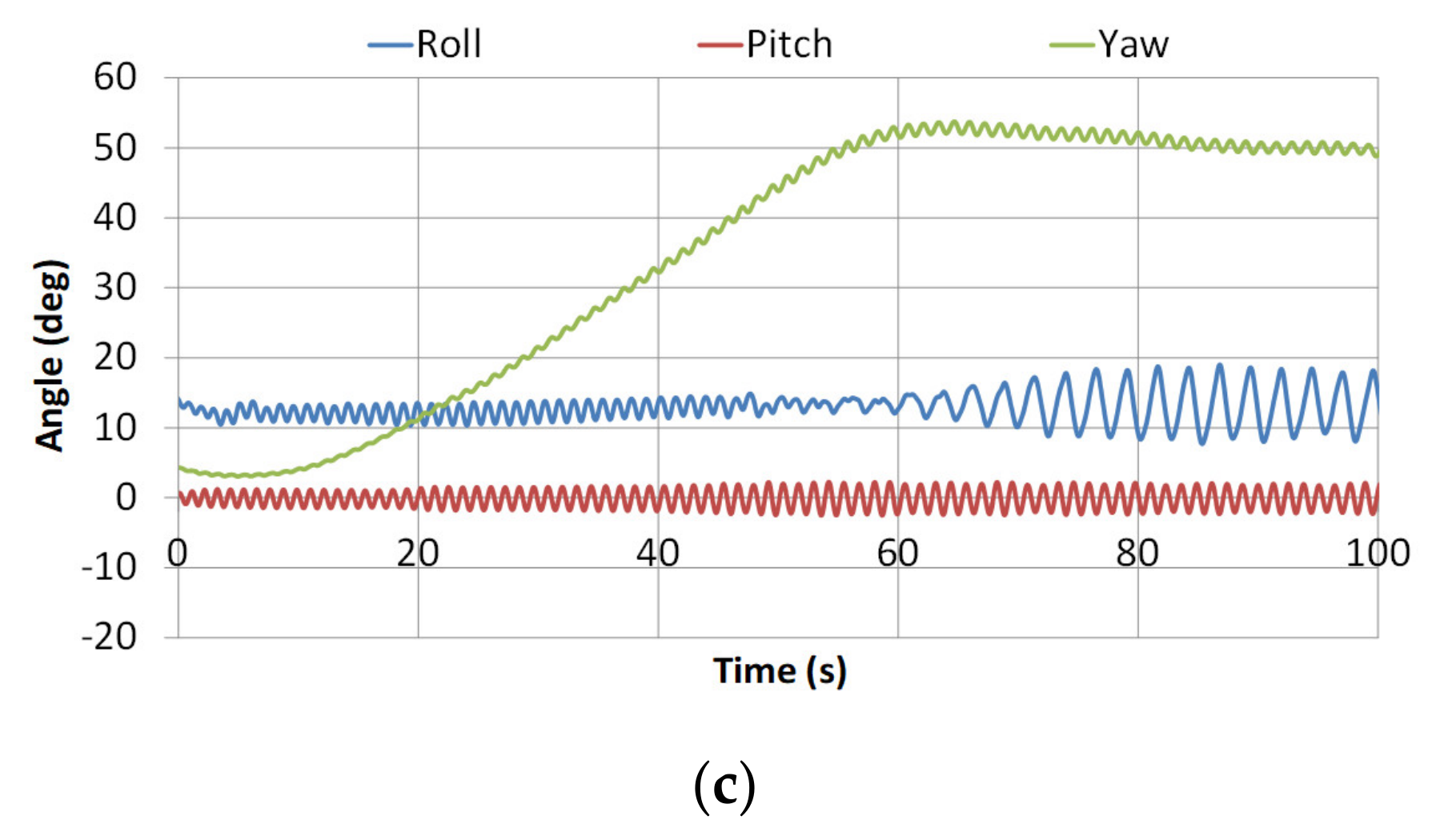
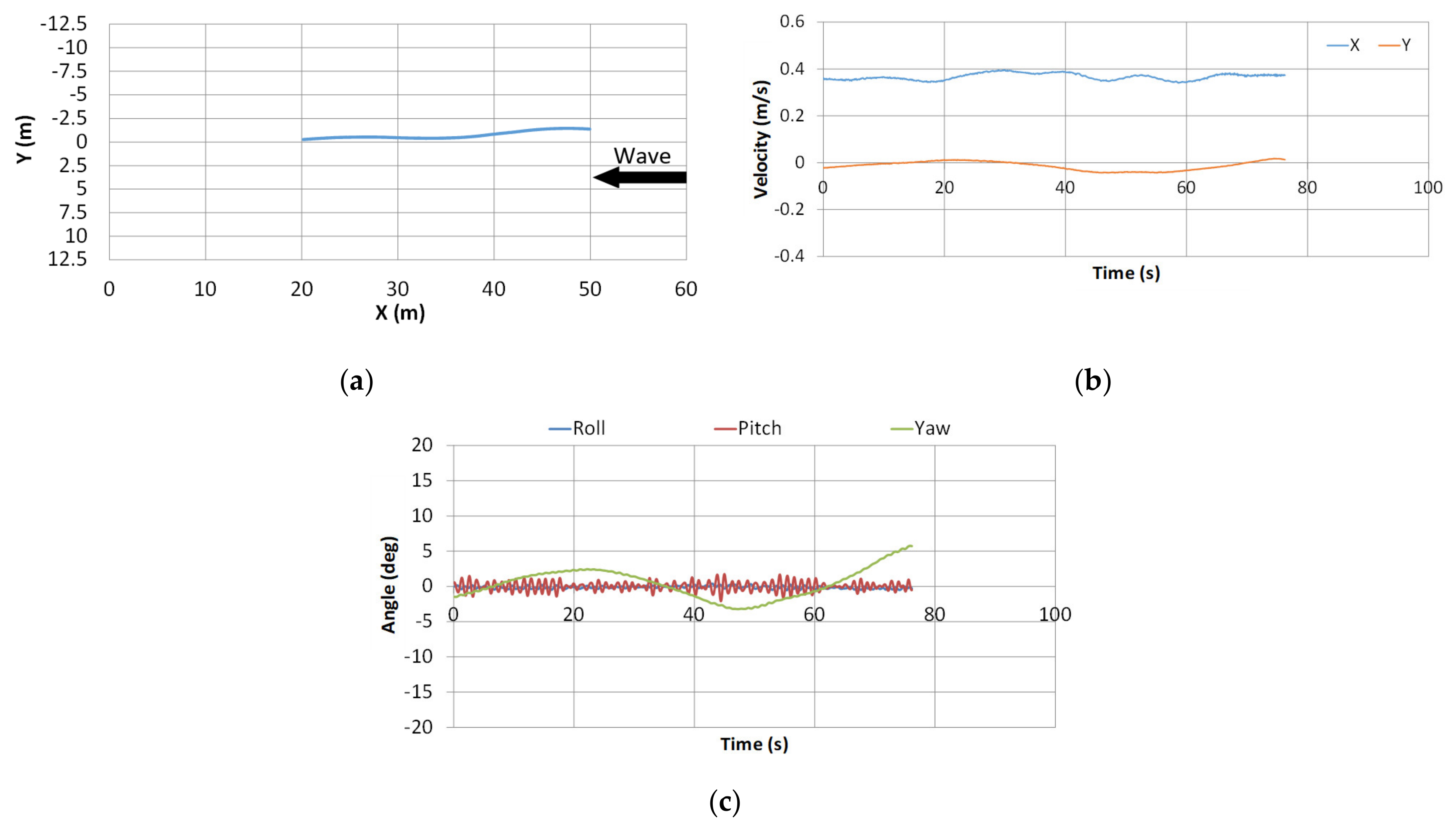
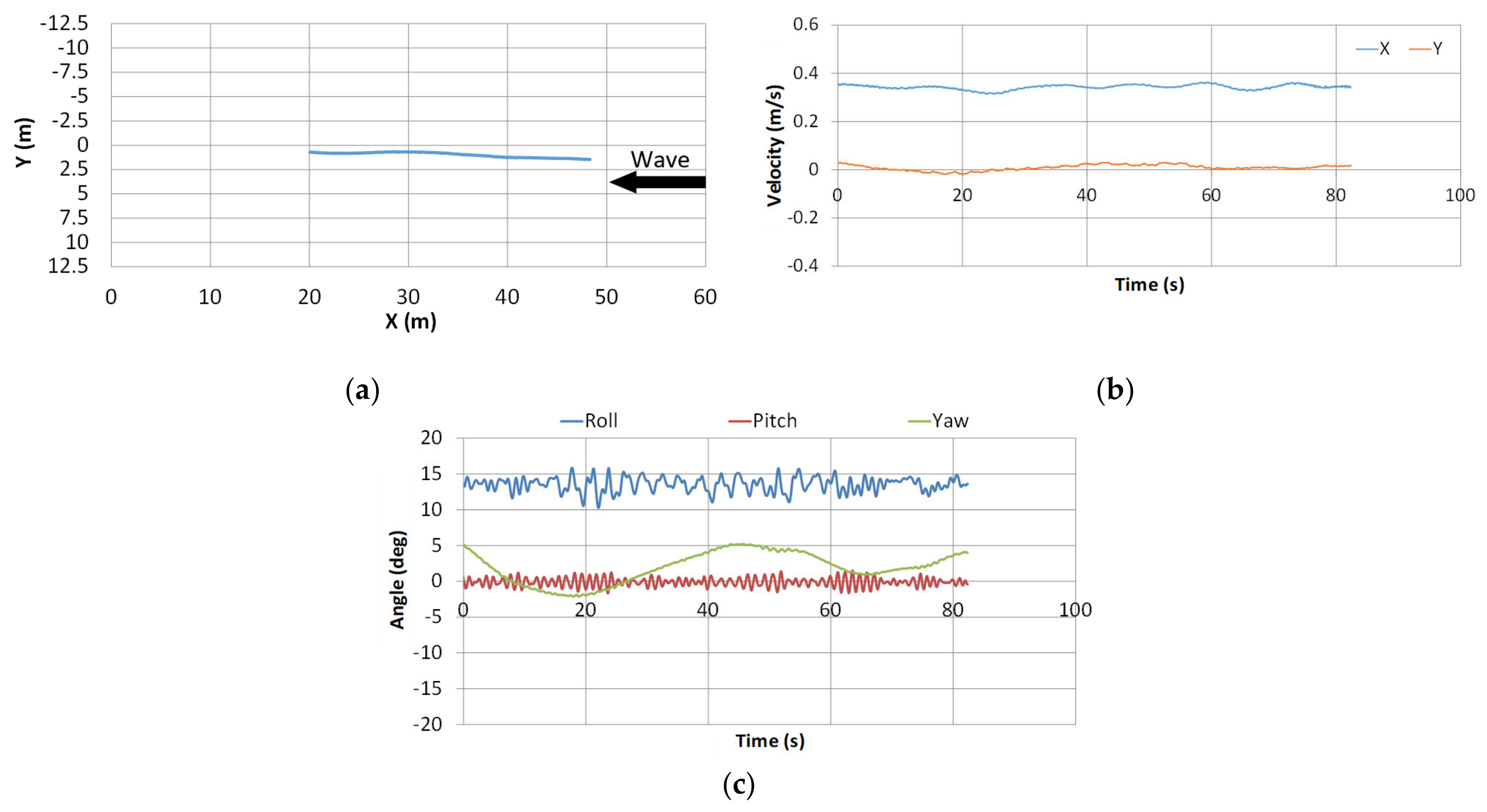
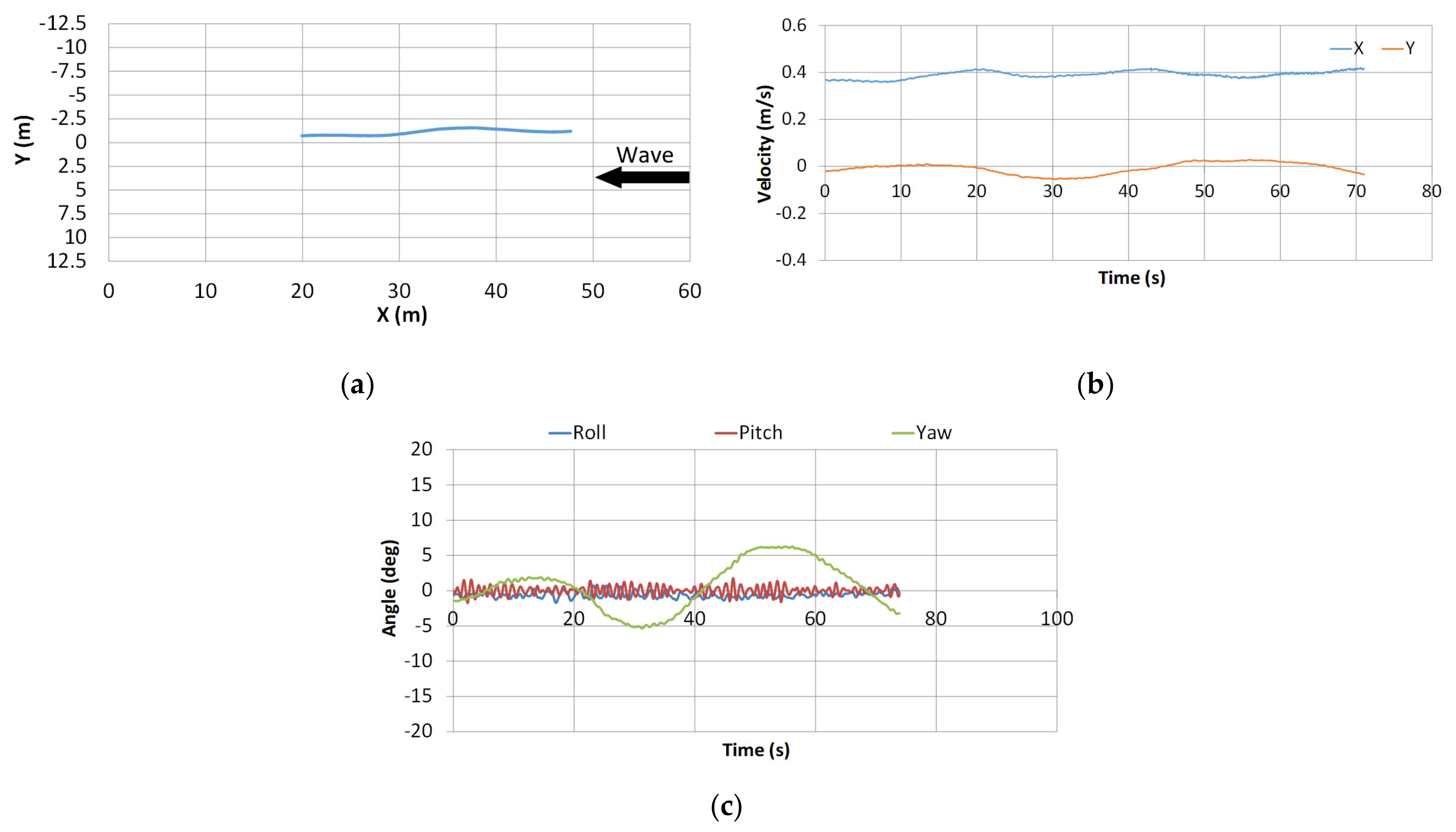
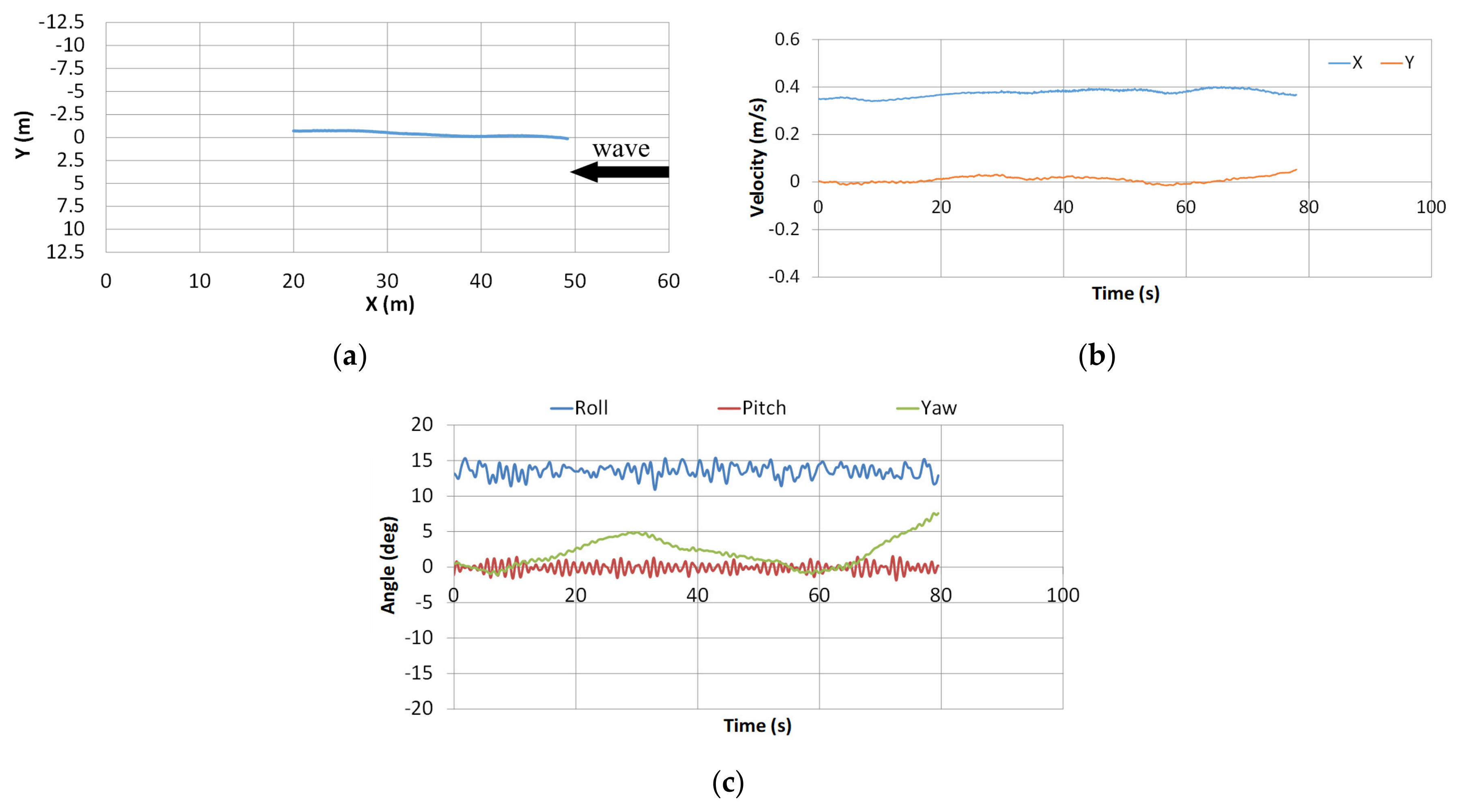
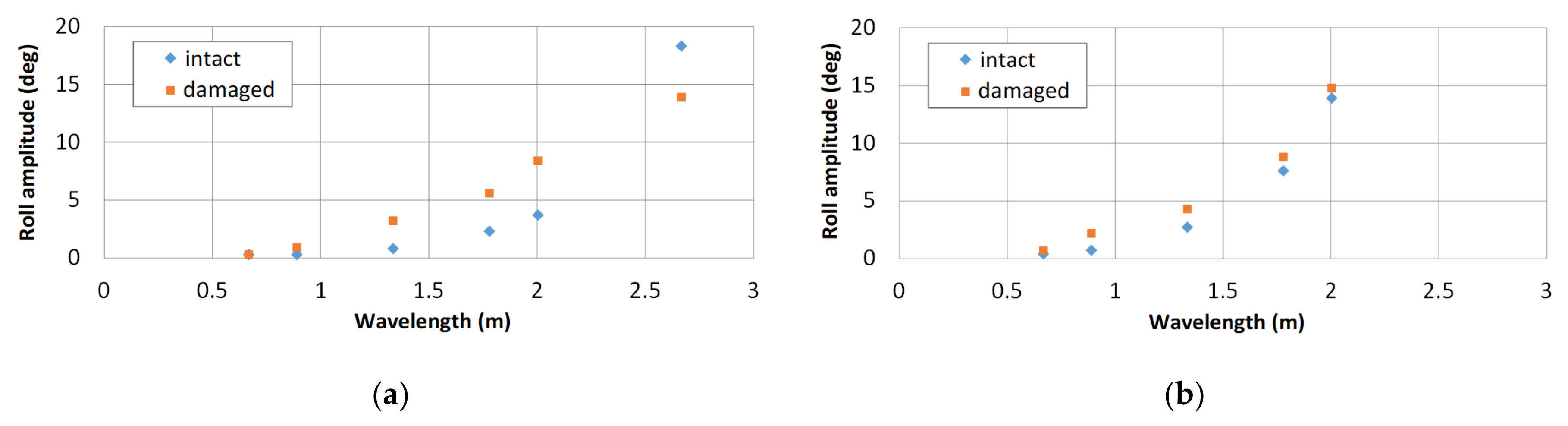
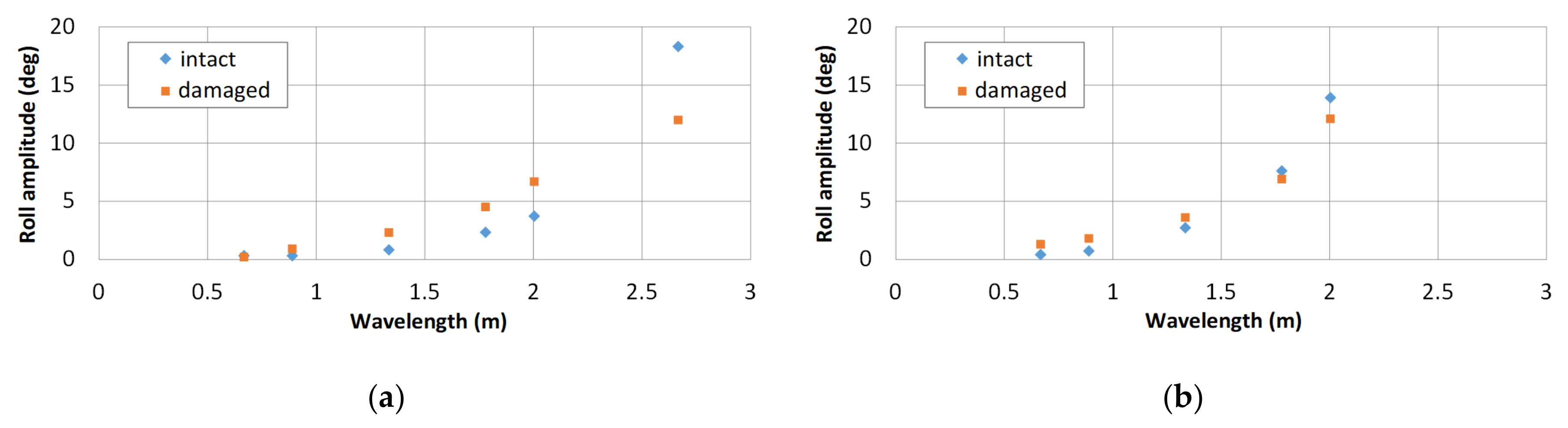
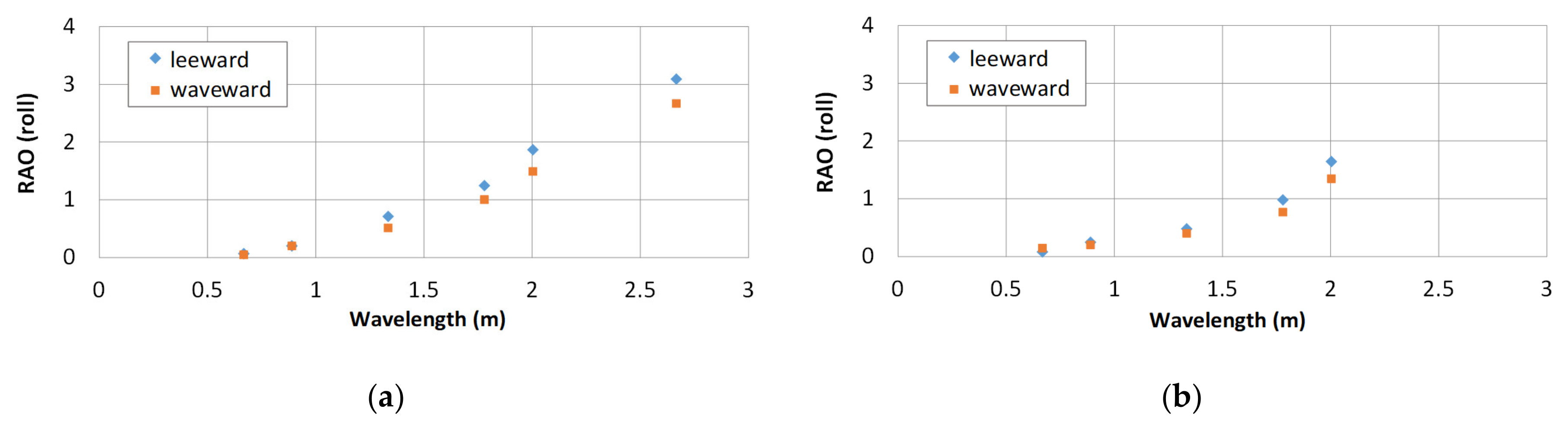
3.1. Course-Keeping Test in Waves
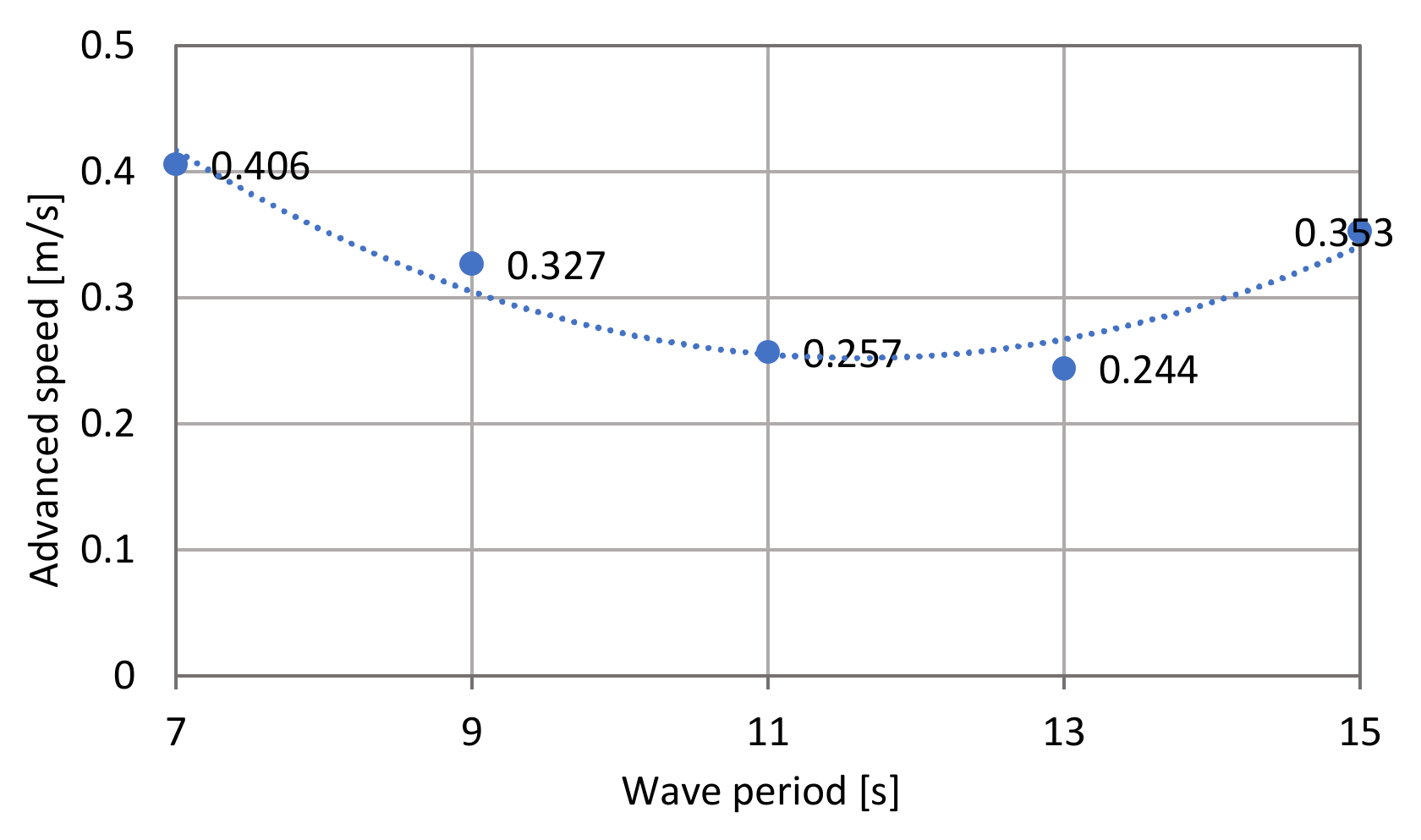
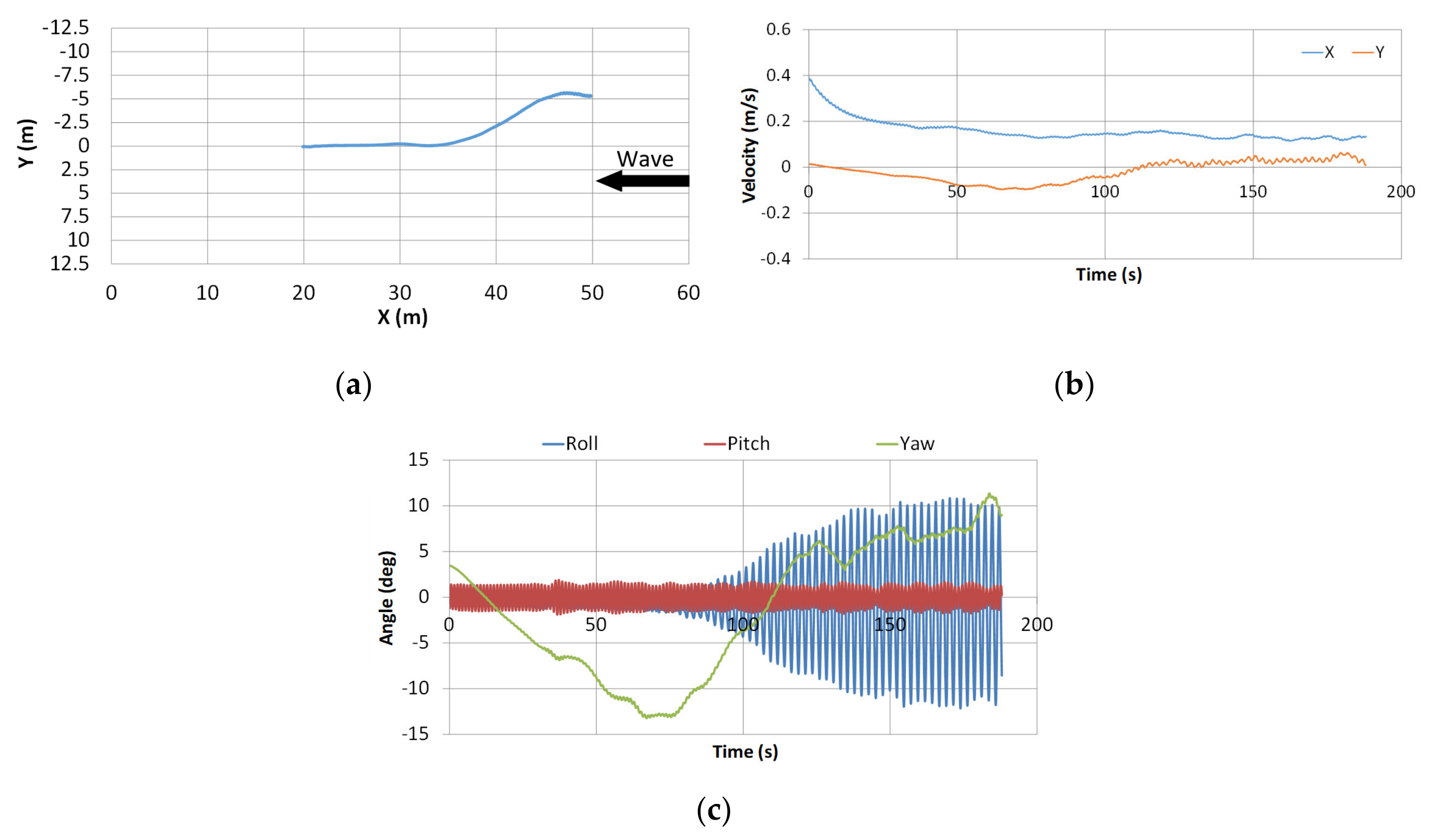
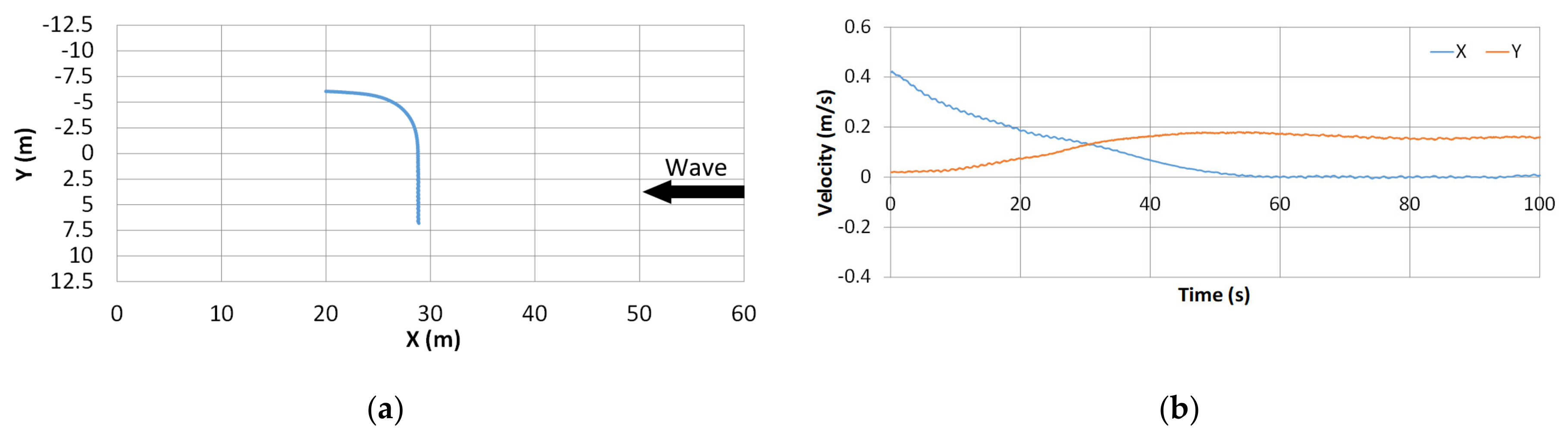
3.2. Drifting Test in Beam Waves
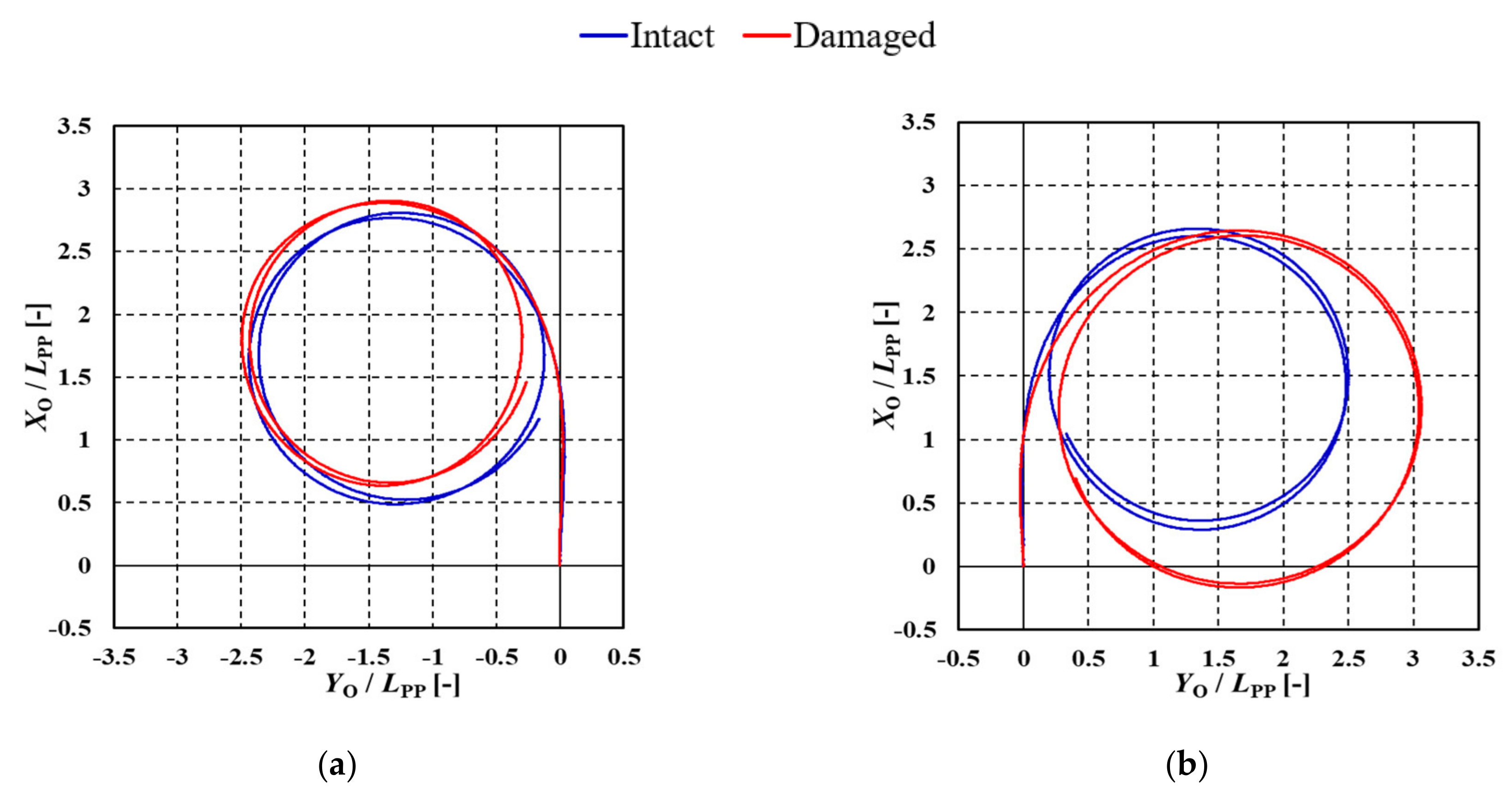
3.3. Manoeuvring Test in Calm Water
4. Manoeuvring Simulation
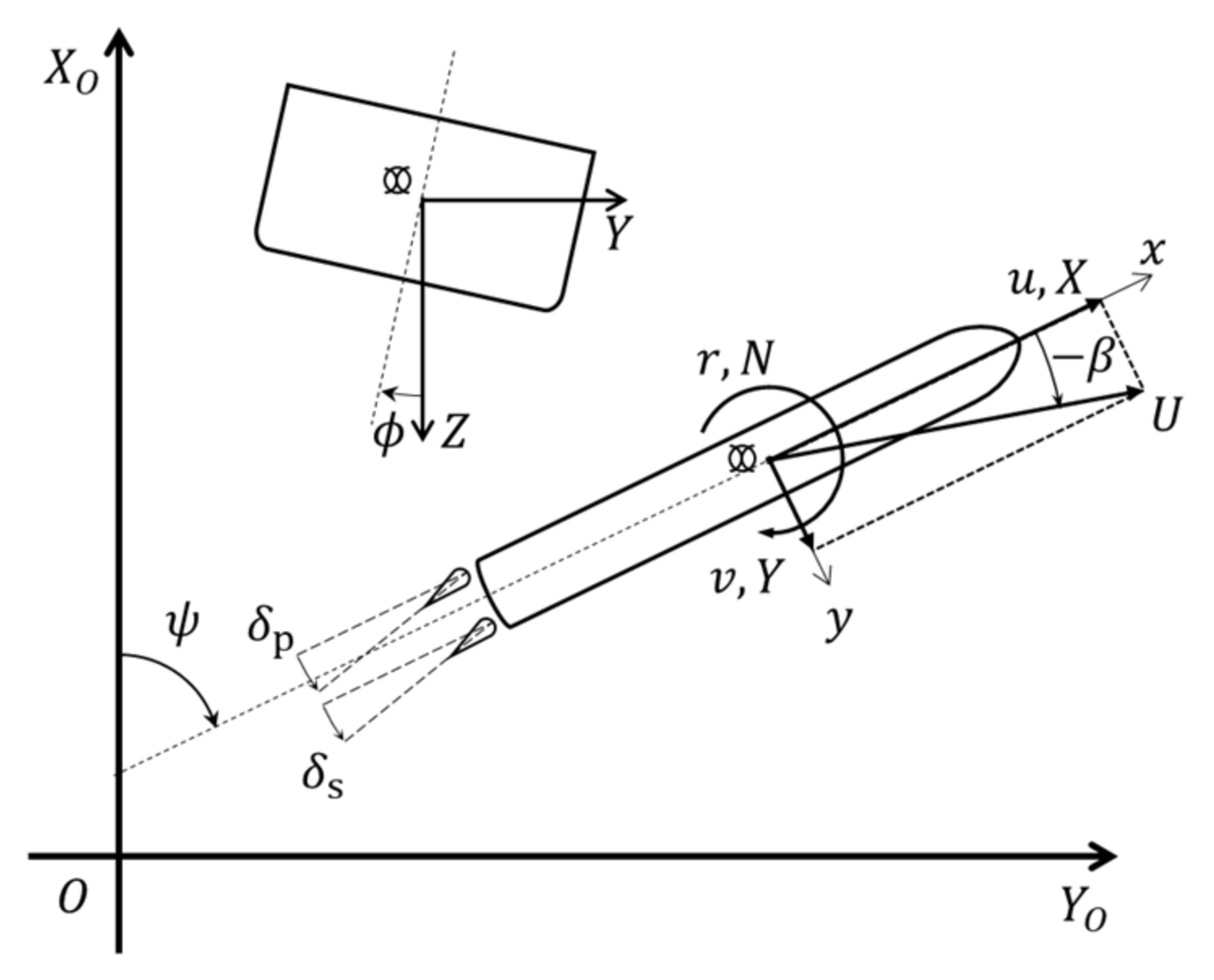
4.1. Mathematical Model
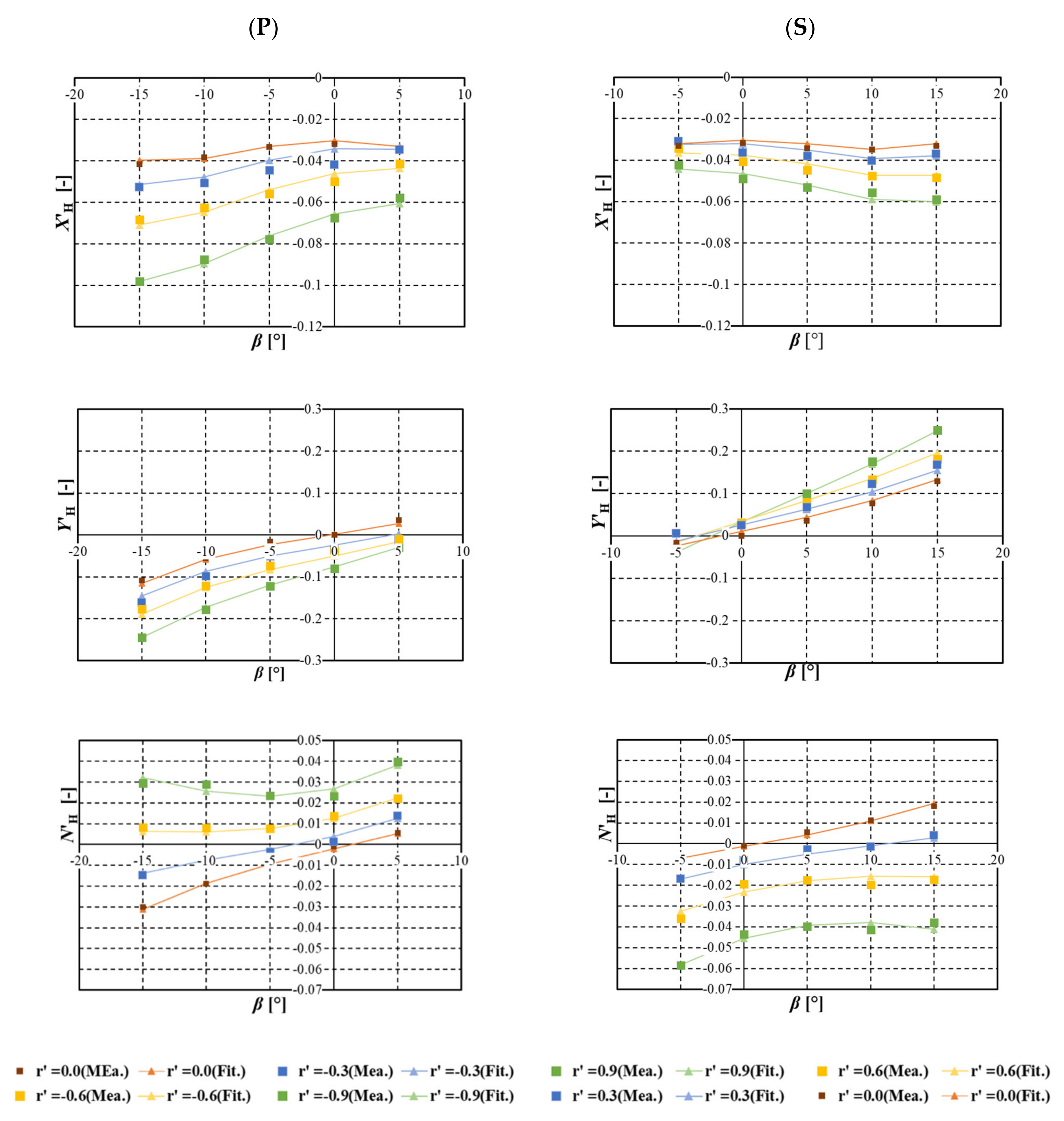
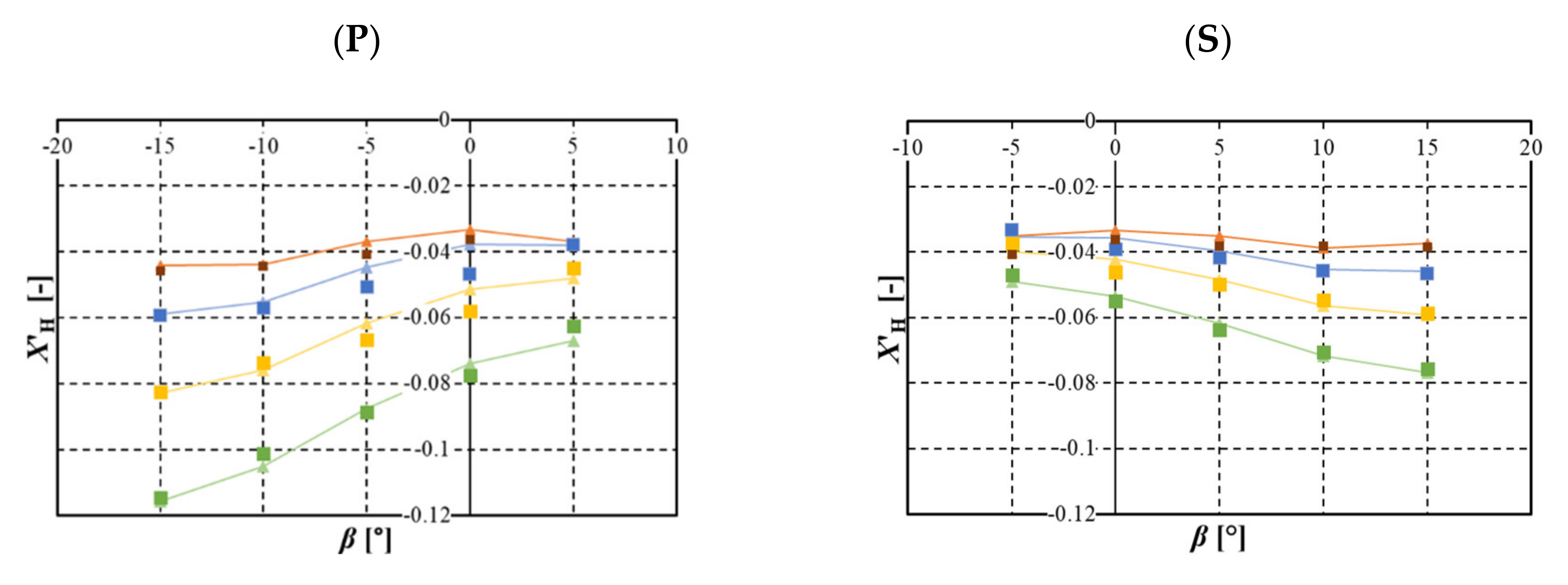
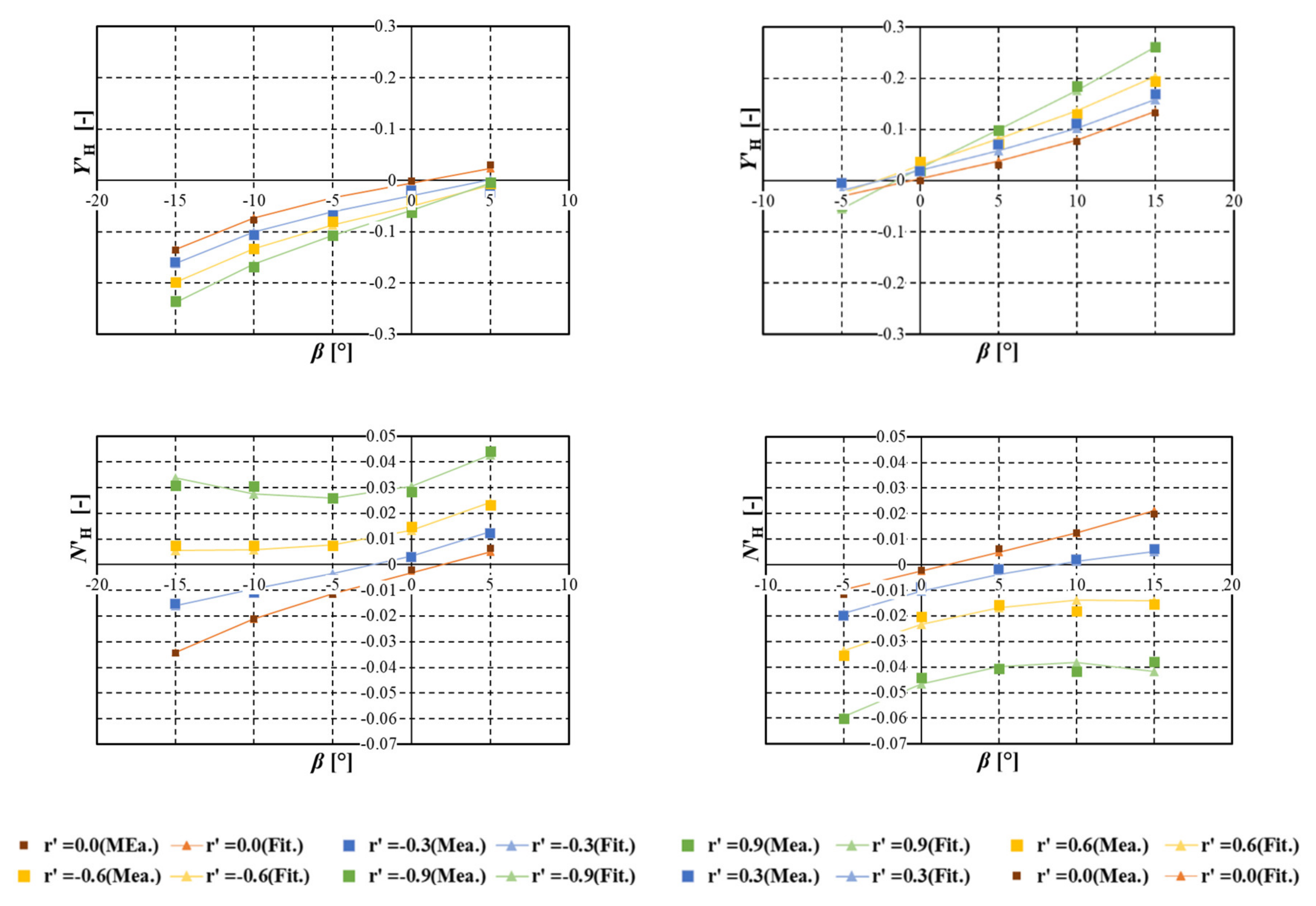
4.2. Circular Motion Test
4.3. Numerical Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| IMO | International Maritime Organization |
| SOLAS | Safety of Life at Sea |
| SRtP | Safe Return to Port |
| CMT | Circular Motion Test |
| ISSC | International Ship & Offshore Structures Congress |
| ITTC | International Towing Tank Conference |
Nomenclature
| Ship mass | |
| Added mass in x- and y-directions | |
| Surge and sway velocities | |
| Yaw rate | |
| Moment of inertia around z-axis | |
| Added moment of inertia around z-axis | |
| Ship resistance in x-axis | |
| Surge force, sway force, and yaw moment around the midship excluding added mass component | |
| Surge force, sway force, and yaw moment around the centre of ship gravity excluding added mass component | |
| Surge force, sway force, yaw moment around the midship acting on hull, excluding added mass component | |
| Surge force, sway force, yaw moment around the midship by propeller | |
| Surge force, sway force, yaw moment around the midship by rudder | |
| Hydrodynamic manoeuvring derivatives | |
| Constant hydrodynamic manoeuvring derivatives | |
| Longitudinal coordinate of the centre of ship gravity | |
| Drift angle | |
| Starboard rudder angle | |
| Port rudder angle | |
| Heading angle |
References
- IMO. MSC.216(82), Amendments to the International Convention for the Safety of Life at Sea, 1974; International Maritime Organization (IMO): London, UK, 2006. [Google Scholar]
- Palazzi, L.; de Kat, J. Model experiments and simulations of a damaged ship with air flow taken into account. Mar. Technol. 2004, 41, 38–44. [Google Scholar]
- Ruponen, P. Model Tests for the Progressive Flooding of a Box-Shaped barge; Report No. M-292; Helsinki University of Technology: Helsinki, Finland, 2006. [Google Scholar]
- Ruponen, P.; Kurvinen, P.; Saisto, I.; Harras, J. Experimental and numerical study on progressive flooding in full-scale. Int. J. Marit. Eng. 2010, 152, A197–A208. [Google Scholar]
- Ikeda, Y.; Ishida, S.; Katayama, T.; Takeuchi, Y.; Kat, J.O. Experimental and Numerical Studies on Roll Motion of a Damaged Large Passenger Ship in Intermediate Stages of Flooding. Fluid Mech. Appl. 2011, 97, 633–641. [Google Scholar] [CrossRef]
- Manderbacka, T.; Ruponen, P.; Kulovesi, J.; Matusiak, J. Model experiments of the transient response to flooding of the box shaped barge. J. Fluids Struct. 2015, 57, 127–143. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; You, J.-M.; Lee, H.-H.; Lim, T.; Park, S.T.; Seo, J.; Rhee, S.H.; Rhee, K.-P. Experimental Study on the Six Degree-of-Freedom Motions of a Damaged Ship Floating in Regular Waves. IEEE J. Ocean. Eng. 2015, 41, 1. [Google Scholar] [CrossRef]
- Hashimoto, H.; Kawamura, K.; Sueyoshi, M. A numerical simulation method for transient behavior of damaged ships associated with flooding. Ocean Eng. 2017, 143, 282–294. [Google Scholar] [CrossRef]
- Cho, S.-K.; Sung, H.; Hong, S.; Nam, B.; Hwang, S.; Kim, Y. Study on the Motions and Flooding Process of a Damaged Ship in Waves. Fluid Mech. Appl. 2019, 119, 223–245. [Google Scholar] [CrossRef]
- Gao, Z.; Gao, Q.; Vassalos, D. Numerical Study of Damaged Ship Motion in Waves. Fluid Mech. Appl. 2019, 119, 247–256. [Google Scholar] [CrossRef]
- Begovic, E.; Mortola, G.; Incecik, A.; Day, A. Experimental assessment of intact and damaged ship motions in head, beam and quartering seas. Ocean Eng. 2013, 72, 209–226. [Google Scholar] [CrossRef]
- Acanfora, M.; De Luca, F. An experimental investigation into the influence of the damage openings on ship response. Appl. Ocean Res. 2016, 58, 62–70. [Google Scholar] [CrossRef]
- Haro, M.P.E.; Seo, J.; Sadat-Hosseini, H.; Seok, W.-C.; Rhee, S.; Stern, F. Numerical simulations for the safe return to port of a damaged passenger ship in head or following seas. Ocean Eng. 2017, 143, 305–318. [Google Scholar] [CrossRef]
- Ćatipović, I.; Ćorak, M.; Parunov, J.; Alujević, N. Seakeeping experiments on damaged ship. Ships Offshore Struct. 2018, 14, 100–111. [Google Scholar] [CrossRef]
- Kim, D.; Park, S.; Park, J.; Yeo, H.; Seo, J.; Rhee, S.H. Dynamic stability analysis including roll motion in the maneuvering motion for a damaged surface naval vessel. In Proceedings of the 13th International Conference on the Stability of Ships and Ocean Vehicles, Kobe, Japan, 16–21 September 2018; pp. 379–386. [Google Scholar]
- IMO. MSC.194(80), Amendments to the International Convention for the Safety of Life at Sea, 1974; International Maritime Organization (IMO): London, UK, 2005. [Google Scholar]
- Umeda, N.; Furukawa, T.; Matsuda, A.; Usada, S. Rudder normal force during broaching of a ship in stern quartering waves. In Proceedings of the 30th Symposium on Naval Hydrodynamics, Hobart, TAS, Australia, 2–7 November 2014. [Google Scholar]
- Matsuda, A.; Hashimoto, H.; Terada, D.; Taniguchi, Y. Validation of free running model experiment in heavy seas. In Proceedings of the 3rd International Conference on Violent Flows, Osaka, Japan, 9–11 March 2016. [Google Scholar]
- ISSC. Report of the Committee 1. Environmental Conditions. In Proceedings of the 2nd International Ship Structures Congress, Delft, The Netherlands, 20–24 July 1964. [Google Scholar]
- Hashimoto, H.; Umeda, N. Prediction of Parametric Rolling in Irregular Head Waves. Fluid Mech. Appl. 2019, 119, 275–290. [Google Scholar] [CrossRef]
- ITTC. The Specialist Committee on Waves-Final Report and Recommendations to the 23rd ITTC. In Proceedings of the 23rd International Towing Tank Conference, Venice, Italy, 8–14 September 2002. [Google Scholar]
- Paulling, J.R. Parametric rolling of ships—Then and now. Fluid Mech. Appl. 2011, 96, 347–360. [Google Scholar]
- IMO. MSC.137(76), Standards for Ship Manoeuvrability; International Maritime Organization (IMO): London, UK, 2002. [Google Scholar]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2014, 20, 37–52. [Google Scholar] [CrossRef] [Green Version]
- Yasukawa, H.; Sakuno, R.; Yoshimura, Y. Practical maneuvering simulation method of ships considering the roll-coupling effect. J. Mar. Sci. Technol. 2019, 24, 1280–1296. [Google Scholar] [CrossRef]
- Yoshimura, Y.; Masumoto, Y. Hydrodynamic Force Database with Medium High Speed Merchant Ships Including Fishing Vessels and Investigation into a Manoeuvring Prediction Method. J. Jpn. Soc. Nav. Arch. Ocean Eng. 2011, 14, 63–73. [Google Scholar] [CrossRef] [Green Version]
- Yoshimura, Y.; Kondo, M.; Nakano, T.; Yamashita, R. Equivalent Simple Mathematical Model for the Manoeuvrability of Twin-propeller Ships under the same propeller-rps. J. Jpn. Soc. Nav. Arch. Ocean Eng. 2016, 24, 157–166. [Google Scholar] [CrossRef] [Green Version]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Actual Ship | Scaled Model |
|---|---|---|
| Length between perpendiculars: Lpp [m] | 246.0 | 3.0 |
| Breadth: B [m] | 37.5 | 0.457 |
| Depth: D [m] | 25.7 | 0.314 |
| Draught: d [m] | 8.05 | 0.098 |
| Area of rudder: AR [m2] | 34.8 | 0.00517 |
| Item | Actual Ship | Scaled Model |
|---|---|---|
| Non-dimensional radius of gyration in pitch: κyy/Lpp [m] | 0.34 | 0.34 |
| Metacentric height: GM [m] | 2.50 | 0.0305 |
| Natural roll period: Tφ [s] | 24.2 | 2.67 |
| Item | Actual Ship | Scaled Model |
|---|---|---|
| Wave period: T [s] | 6.0, 8.1, 12.1, 16.1, 18.1, 24.2 | 0.67, 0.89, 1.34, 1.78, 2.00, 2.67 |
| Wave steepness: H/λ | 0.025, 0.05 | 0.025, 0.05 |
| (a) Intact | Advance | Tactical Diameter | Turning Radius | Turning Time [s] | Speed Reduction(U/U0) | Drift Angle [°] | Yaw Rate [°/s] | Heel Angle [°] |
| −35 degree | 2.65 × Lpp | 2.33 × Lpp | 1.16 × Lpp | 77.80 | 0.551 | −23.88 | −4.58 | 1.45 |
| +35 degree | 2.50 × Lpp | 2.38 × Lpp | 1.13 × Lpp | 77.65 | 0.515 | 23.87 | 4.53 | −1.37 |
| (b) Damaged | Advance | Tactical Diameter | Turning Radius | Turning time [s] | Speed Reduction(U/U0) | Drift Angle [°] | Yaw Rate [°/s] | Heel Angle [°] |
| −35 degree | 2.84 × Lpp | 2.45 × Lpp | 1.11 × Lpp | 1.13 × Lpp | 0.497 | −16.38 | −4.18 | 17.53 |
| +35 degree | 2.56 × Lpp | 2.99 × Lpp | 1.39 × Lpp | 83.4 | 0.619 | 18.89 | 4.33 | 13.80 |
| (a) Intact | 1st OSA (deg) | 2nd OSA (deg) | K [1/s] | T [s] |
| −10/10° | 7.94 | 15.64 | 0.66 | 30.97 |
| +10/10° | 7.81 | 13.94 | 0.58 | 26.39 |
| −20/20° | 9.92 | 12.71 | 0.25 | 10.37 |
| +20/20° | 10.18 | 12.21 | 0.20 | 9.10 |
| (b) Damaged | 1st OSA (deg) | 2nd OSA (deg) | K [1/s] | T [s] |
| −10/10° | 5.08 | 11.98 | 0.30 | 14.56 |
| +10/10° | 7.75 | 12.37 | 0.35 | 17.80 |
| −20/20° | 9.27 | 8.92 | 0.19 | 8.97 |
| +20/20° | 7.82 | 14.08 | 0.22 | 10.21 |
| (P) | Intact w/o heel | Intact w/heel | Damaged w/o heel | Damaged w/heel |
| −0.0301 | −0.0303 | −0.0303 | −0.0333 | |
| −0.2258 | −0.3948 | −0.3730 | −0.5067 | |
| −0.0367 | −0.0978 | −0.0870 | −0.1313 | |
| −0.0129 | −0.0436 | −0.0377 | −0.0501 | |
| 1.1771 | 3.7276 | 3.8529 | 5.0689 | |
| (S) | Intact w/o heel | Intact w/heel | Damaged w/o heel | Damaged w/heel |
| −0.0301 | −0.0303 | −0.0303 | −0.0333 | |
| −0.2258 | −0.2466 | −0.2761 | −0.2735 | |
| −0.0367 | −0.0506 | −0.0862 | −0.0823 | |
| −0.0129 | −0.0200 | −0.0354 | −0.0249 | |
| 1.1771 | 3.2212 | 2.2133 | 3.1503 |
| (P) | Intact w/o heel | Intact w/heel | Damaged w/o heel | Damaged w/heel |
| 0.000 | 0.0023 | −0.0061 | −0.0052 | |
| 0.2691 | 0.2630 | 0.2979 | 0.0892 | |
| 0.0769 | 0.0866 | 0.0269 | −0.0198 | |
| 0.8984 | 2.7091 | 0.8080 | 0.4248 | |
| −0.4087 | −0.1367 | −0.2426 | −0.5771 | |
| 0.3347 | 0.2825 | 0.3456 | 0.0064 | |
| −0.0604 | 0.0002 | −0.0130 | −0.0216 | |
| (S) | Intact w/o heel | Intact w/heel | Damaged w/o heel | Damaged w/heel |
| 0.000 | 0.0108 | −0.0017 | 0.0037 | |
| 0.2691 | 0.3758 | 0.2889 | 0.3772 | |
| 0.0769 | 0.0520 | 0.0577 | 0.0597 | |
| 0.8984 | 1.2986 | 1.0327 | 1.8519 | |
| −0.4087 | −0.1925 | −0.1729 | −0.3914 | |
| 0.3347 | 0.5014 | 0.3444 | 0.6105 | |
| −0.0604 | −0.0349 | −0.0584 | −0.0451 |
| (P) | Intact w/o heel | Intact w/heel | Damaged w/o heel | Damaged w/heel |
| 0.000 | −0.0020 | −0.0023 | −0.0032 | |
| 0.0730 | 0.0815 | 0.0921 | 0.0892 | |
| −0.0169 | −0.0179 | −0.0274 | −0.0198 | |
| 0.2076 | 0.4357 | 0.1104 | 0.4248 | |
| −0.4102 | −0.5642 | −0.3063 | −0.5771 | |
| 0.0453 | 0.0011 | 0.0217 | 0.0064 | |
| −0.0264 | −0.0174 | −0.0177 | −0.0216 | |
| (S) | Intact w/o heel | Intact w/heel | Damaged w/o heel | Damaged w/heel |
| 0.000 | −0.0013 | −0.0006 | −0.0024 | |
| 0.0730 | 0.0624 | 0.0859 | 0.0825 | |
| −0.0169 | −0.0261 | −0.0167 | −0.0236 | |
| 0.2076 | 0.2483 | 0.2099 | 0.1037 | |
| −0.4102 | −0.4566 | −0.3487 | −0.4268 | |
| 0.0453 | 0.0553 | 0.0361 | 0.0368 | |
| −0.0264 | −0.0285 | −0.0311 | −0.0316 |
| (a) Intact w/heel | 1st OSA(°) | 2nd OSA(°) | K[1/s] | T [s] |
| −10/10° | 4.90 | 3.04 | 0.15 | 7.23 |
| +10/10° | 2.87 | 11.54 | 0.24 | 12.61 |
| −20/20° | 7.34 | 6.63 | 0.14 | 7.51 |
| +20/20° | 5.41 | 13.23 | 0.17 | 9.52 |
| (b) Damaged w/heel | 1st OSA(°) | 2nd OSA(°) | K[1/s] | T [s] |
| −10/10° | 5.22 | 4.03 | 0.17 | 8.95 |
| +10/10° | 2.96 | 11.67 | 0.25 | 12.63 |
| −20/20° | 8.24 | 10.11 | 0.18 | 9.07 |
| +20/20° | 5.72 | 13.46 | 0.18 | 9.84 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuura, T.; Hashimoto, H.; Matsuda, A. Manoeuvrability of a Large Cruise Ship after Damage for Safe Return to Port. J. Mar. Sci. Eng. 2020, 8, 378. https://doi.org/10.3390/jmse8050378
Yuura T, Hashimoto H, Matsuda A. Manoeuvrability of a Large Cruise Ship after Damage for Safe Return to Port. Journal of Marine Science and Engineering. 2020; 8(5):378. https://doi.org/10.3390/jmse8050378
Chicago/Turabian StyleYuura, Tetsuhiro, Hirotada Hashimoto, and Akihiko Matsuda. 2020. "Manoeuvrability of a Large Cruise Ship after Damage for Safe Return to Port" Journal of Marine Science and Engineering 8, no. 5: 378. https://doi.org/10.3390/jmse8050378
APA StyleYuura, T., Hashimoto, H., & Matsuda, A. (2020). Manoeuvrability of a Large Cruise Ship after Damage for Safe Return to Port. Journal of Marine Science and Engineering, 8(5), 378. https://doi.org/10.3390/jmse8050378