1. Introduction
A ship’s maneuverability is typically only considered in calm water in most previous research [
1], while a seagoing vessel maneuvering in waves is more often the actual scenario. This research on maneuvering in waves is practically significant, considering navigation safety. There are several existing methods to study ship maneuverability in waves, such as model tests and numerical simulation that can be generally classified as CFD methods, two-time scale methods, and hybrid approaches.
The experimental method is a practical and reliable methodology to investigate the ship’s maneuverability in waves. Turning circles and zig-zag tests in regular waves have been conducted to analyze various parameters such as wave length, wave direction and ship’s loading condition’s effects on maneuvering motions [
2,
3]. However, specific model tests are time consuming, expensive, and should only be considered for the validation of more general numerical approaches.
As for the numerical simulation, CFD methods in principle consider all physics facts but still needs further development in order to reach the level of industrial applicability. Islam et al. [
4] applied an open source RANS solver, OpenFOAM to simulate hydrodynamic derivatives and his results matched well with two sets of experimental data, with the exception of the pure yaw cases. Uharek et al. [
5] showed that the RANS code Neptuno was able to predict the mean drift loads for vessels maneuvering in oblique regular waves and that the inertial contributions cannot be neglected. Wang et al. [
6] applied a CFD solver based on OpenFOAM and applied the overset grid technique and six DoF module to solve for the motion of the free-running ship with twin rotating propellers and turning rudders. However, CFD’s current large requirement of computational resources and technical difficulties has confined it to the research communities worldwide. The application to propellers and rudder models under large attack angle suggest that fulfillment of the real time simulation requirement is hardly to be satisfied from a realistic point of view [
7]. An alternative to CFD methods are the two-time scale method and the hybrid approach, both of which are based on potential flow methods to consider the wave effect. As for the hybrid approach, it combines the maneuvering motion and wave-induced motion into the rigid body motion equations to simulate a vessel’s maneuverability [
8,
9], but ignores the effect of the second-order wave loads. Through the investigation by Lee et al. [
10] regarding the effects of waves on ship’s maneuverability, it can be concluded that the second-order wave loads present a significant effect on the trajectory of turning and zig-zag tests. On the other hand, the two-time scale method considers and separates the ship motions into the wave frequency and low frequency components, and by doing this, it is possible to consider the second-order wave loads and motions to enhance its accuracy. Skejic and Faltinsen [
11] applied the two-time scale approach to analyze ship maneuvering in regular waves, by evaluating the wave drift forces through four different strip theory methods and considering that when the ship has a mean forward speed and undertakes maneuvering in waves, the wave-frequency problem is affected by the slowly-varying maneuvering. Seo and Kim [
12] developed a coupled analysis of the maneuvering and seakeeping problems through a two-time scale approach, where the wave loads were estimated using a Rankine panel method in the time domain. Lee and Kim [
13] used a 3D time-domain Rankine panel method to analyze the ship motion due to the waves and near-field method to consider the wave drift loads. It can be concluded that the seakeeping quantities, such as ship motion and wave drift force, are significantly affected by both forward speed and side slip speed. Moreover, the accuracy of turning simulation results are also closely related to the prediction of wave drift loads. Chillcce and Moctar’s [
14] solution assumed that the calm water hydrodynamic parameters and the wave induced forces do not interact and applied a RANS approach to obtain the calm water forces and a 3D Rankine source boundary element method to consider the wave-induced second-order loads. Their results showed that the ship’s drift in turning circle can be accurately captured by considering the mean second-order wave loads.
A derivation and full expression of the second-order wave loads acting on a floating body was presented in our previous research [
15] through a direct pressure integral method, in which both the mean drift wave forces and moments coefficients and the full quadratic transfer function have been presented. It also contained a comparison of Newman’s approximation [
16] with an evaluation of the off-diagonal elements in the full QTF matrix. This direct pressure integral method presented and showed the importance and necessity of considering the off-diagonal elements, especially when the difference wave frequency increases and water depth decreases. While considering the mean wave forces and moments acting on a floating body with speed, multiple numerical solutions have been proposed and applied including far field method and near field method. As for the far field method, Aranha [
17,
18,
19,
20,
21] proposed a formula to consider the effect of current or a floating body’s forward speed on the mean wave forces and moments. Aranha’s method has been applied extensively in offshore engineering field due to the relative simplicity of the final expression, but has a limitation of moderately low current velocity or vessel forward speed. As for the near field methodology, Joncquez [
22] discussed two linearization methods, the Neumann-Kelvin and the Double-Body flow linearization. Through the comparison, it was found that the Neumann-Kelvin works better for the Series 60 and Wigley hull III and is more robust and less sensitive to the smoothness of the hull geometry. A similar conclusion was drawn by Kim [
23], who also indicated that Neumann-Kelvin linearization generally shows better results in the case of high Froude numbers and slender bodies. Yu and Falzarano [
24] conducted a comparative study of the Neumann-Kelvin and Rankine source method for wave resistance and found that the Rankine source method can give satisfactory results for a wider range of ship models, but with a very expensive numerical calculation cost compared with Neumann-Kelvin linearization.
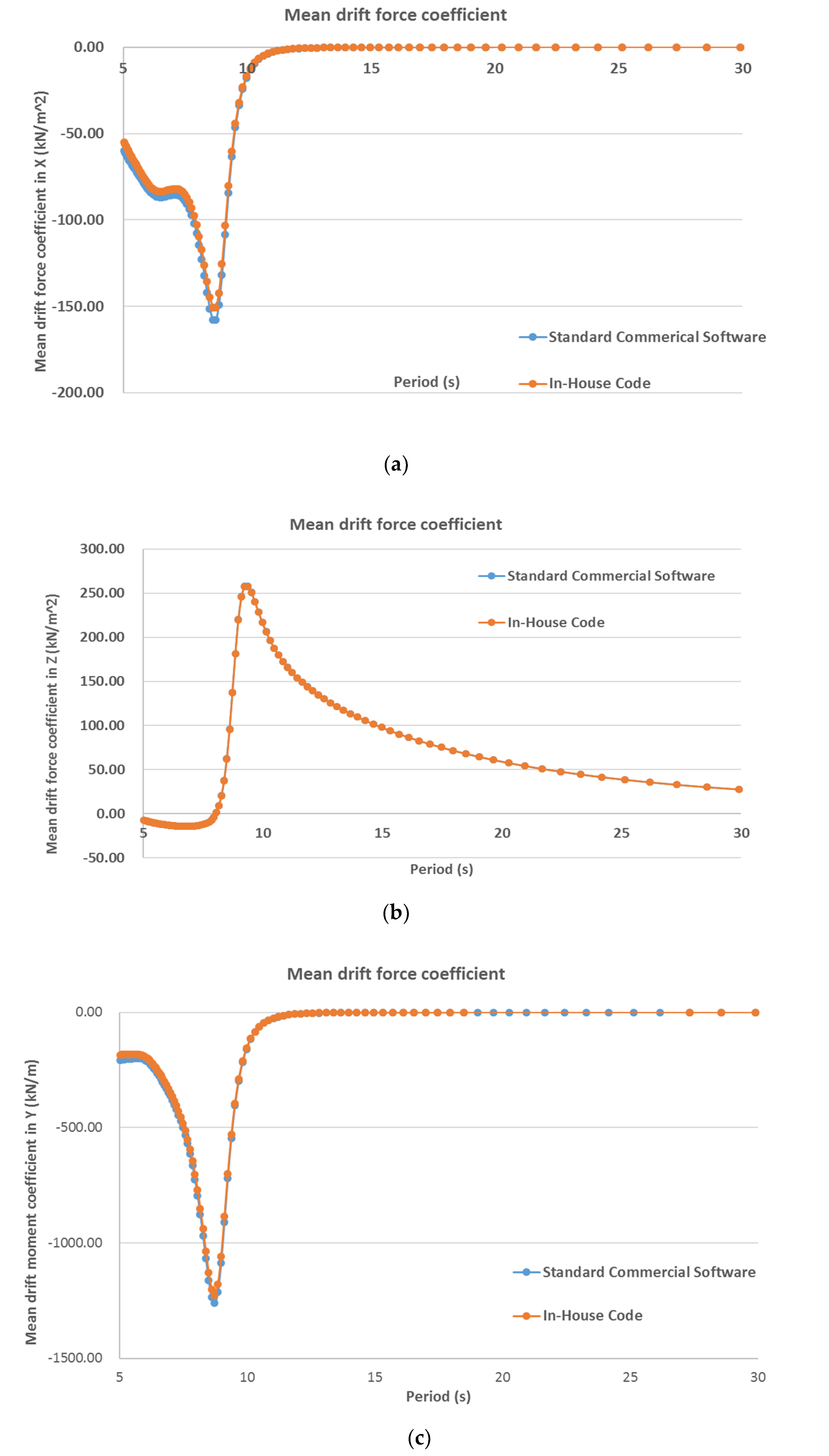
The research herein introduces and explains the theoretical derivations and the framework of coupling the seakeeping and maneuvering modules to numerically model maneuvering vessel in waves involving the second-order wave loads. The work of seakeeping problems herein is based upon our original and systematic perturbation approach to derive the hydrodynamic forces acting upon the hull of a floating body in waves. This approach has been validated for zero speed through a comparison to the industry standard commercial code WAMIT [
15]. The Neumann-Kelvin linearization method has been applied to consider the vessel forward speed’s effect in the seakeeping problem and then coupled with the maneuvering problems in the two-time scale method [
25]. Moreover, this approach has been applied to the KVLCC and KCS models as an example and compared to available experimental results of maneuvering in waves. Through the comparison with the model tests, this framework herein has been found to be an accurate and efficient approach to study maneuvering of ships in waves. The current work will provide a meaningful numerical basis for our ongoing projects of seakeeping and maneuvering in waves. Furthermore, this research can be also undertaken to expand its range of applicability, including the minimum powering requirements for ships in adverse conditions [
26].
3. The Neumann-Kelvin and Double-Body Linearization
A well-known linearization scheme in ship hydrodynamics is the Neumann-Kelvin linearization with respect to the forward speed
U, whose assumption is that the radiation potential caused by the floating body is less significant than the uniform flow [
23]. Moreover, the Kelvin ship waves effects on the free surface and the impact on the flow potential due to the floating body’s shape are negligible, which simplifies the boundary conditions. Therefore, it is also called uniform-flow linearization and applicable for a slender floating body, whose total potential can be expressed as:
where:
In this scenario, denotes the wave potential, ηi denotes the vessel’s motions in 6 degrees of freedom, denotes the wave frequency while is the encounter frequency. denotes the radiation wave potential, and is the wave direction with respect to the vessel-fixed coordinate.
The double-body flow linearization was introduced by Dawson [
28], who considers both the forward speed U and the shape of the ship hull. The steady potential on the hull through the Double-Body is calculated by assuming the symmetry of the ship hull with respect to the free surface at z = 0 [
23]. In the previous research, the numerically estimated added resistances through these two methodologies show discrepancies, due to the radiation components from different body-boundary conditions.
The total potential:
where
Φ is the steady base flow that is of
O(1) and
is the perturbation potential, which is of
O(ε).
The linearized boundary condition for the perturbation potential in the Neumann-Kelvin linearization can be expressed as:
The linearized boundary condition for the perturbation potential in double-body flow linearization can be expressed as:
where
= (U − )i + (V + )j, where
U and
V are the vessel’s forward and lateral speed, respectively;
is the vessel’s yaw’s angular speed;
is the wave elevation on the free surface.
is the m-term containing the interaction between the steady and unsteady solutions. In Neumann-Kelvin linearization with only forward speed
U for example: (
m1,
m2,
m3,
m4,
m5,
m6) = (0, 0, 0, 0,
Un3, −
Un2); with only lateral speed
V for example: (
m1,
m2,
m3,
m4,
m5,
m6) = (0, 0, 0, −
Vn3, 0,
Vn1). On the other hand, in the double-body flow linearization, the m-terms can be expressed as:
More details of the corresponding our forward speed derivations can be found in
Appendix B.
4. The 3D Maneuvering Mathematical Model
The mathematical model of the maneuvering motions of ships is now well established. Linear equations of motions will be considered in this scenario, in motion modes of surge, sway, and yaw, while the motions of roll, pitch, and heave are often neglected and not considered in such analysis. Eulerian or vessel fixed coordinate systems with axes at the mid-point of the vessel hull can be applied to describe the ship motions. The hydrodynamic forces and the modes of vessel motions can be expressed as:
where
u and
v are the longitudinal and lateral velocities and
r is the yaw rate.
Iz is the moment of inertia with respect to the vertical axis going through the midship point, therefore the horizontal distance between the center of gravity and the midship point is
xG. The above hydrodynamics forces and moments acting on the ship can be developed through perturbations, where the hydrodynamic loads are proportional to the perturbation quantities.
Xdrift stands for the longitudinal wave drift loads in the seakeeping problem.
Combing the above sets of equations sets with only the linear terms, the linearized equations of maneuvering ship’s motion can be expressed as follows.
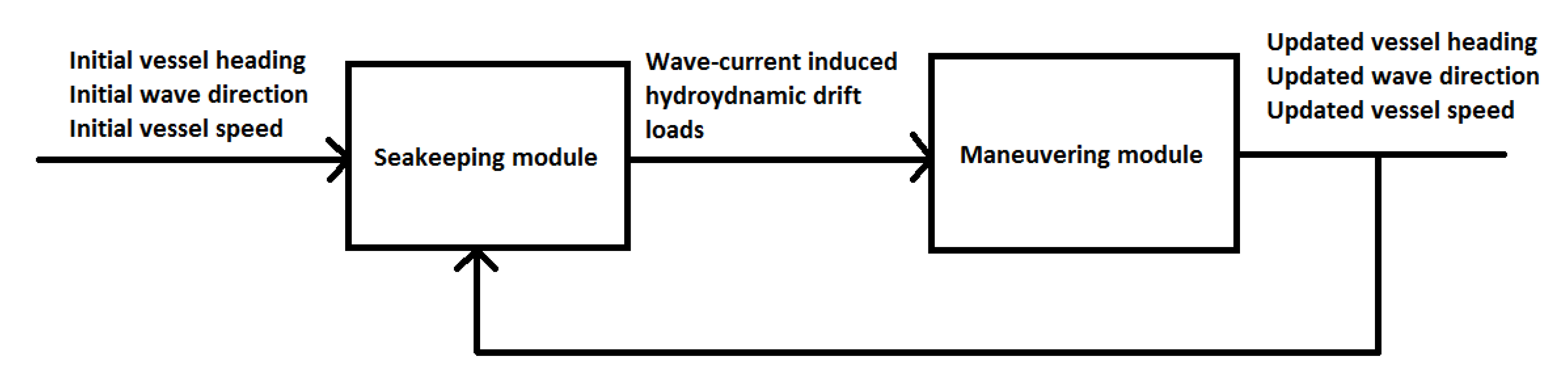
While numerically evaluating a maneuvering ship in waves, there are two modules, namely the seakeeping module and the maneuvering module in each time step, which take the current environmental parameters such as the vessel speed, vessel heading, and wave direction as the input and output the updated input for the next time step. The numerically evaluated hydrodynamic coefficients including the vessel hull, rudder induced loads and the drift loads considering the wave drift damping are all considered as the internal parameters in these two modules. The flow chart of the coupling effect of the seakeeping and maneuvering analysis in terms of slowly varying mean second wave loads that also change the ship speed and wave heading is be presented in
Figure 4.
5. Simulation of Maneuvering in Waves
In this study, two vessels were selected, a KVLCC model and KCS model. For the KVLCC model: the Lpp is 320 m, the draught is 20.8 m, and the displacement is 312,622 m
3. Four regular waves have been selected, whose ratios of the wave length and the vessel length are 1.25, 1, 0.75 and 0.5, respectively. The vessel’s starting speed is 9.3 knots. Both the turning circle trajectory and zig-zag test time series were numerically evaluated. For the KCS model: the Lpp is 230 m; the draught is 10.8 m; the displacement is 52,030 m
3. The experimental maneuvering results carried out by Hiroshima University [
29] were chosen as the reference for the turning circle trajectory in both the calm water and regular wave with wave direction of 180 degrees, whose wave length is equal to the vessel length. The vessel’s starting speed in both the calm water and wave tests is Fn = 0.16 (corresponding to a full scale 14.5 knots). In the wave test, the regular wave’s height is 3.61 m in the full scale with a full scale wave period of 12.14 s.
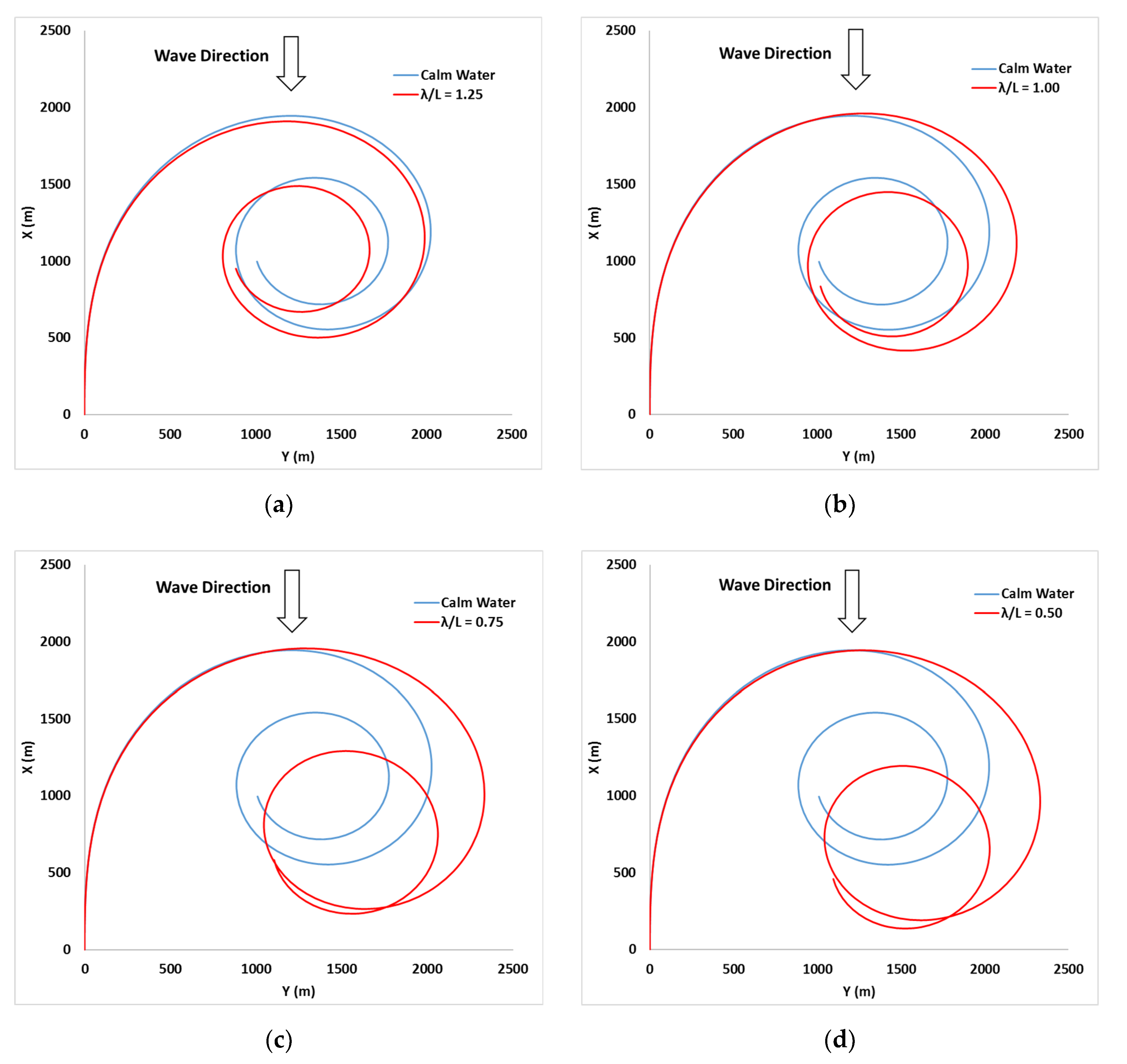
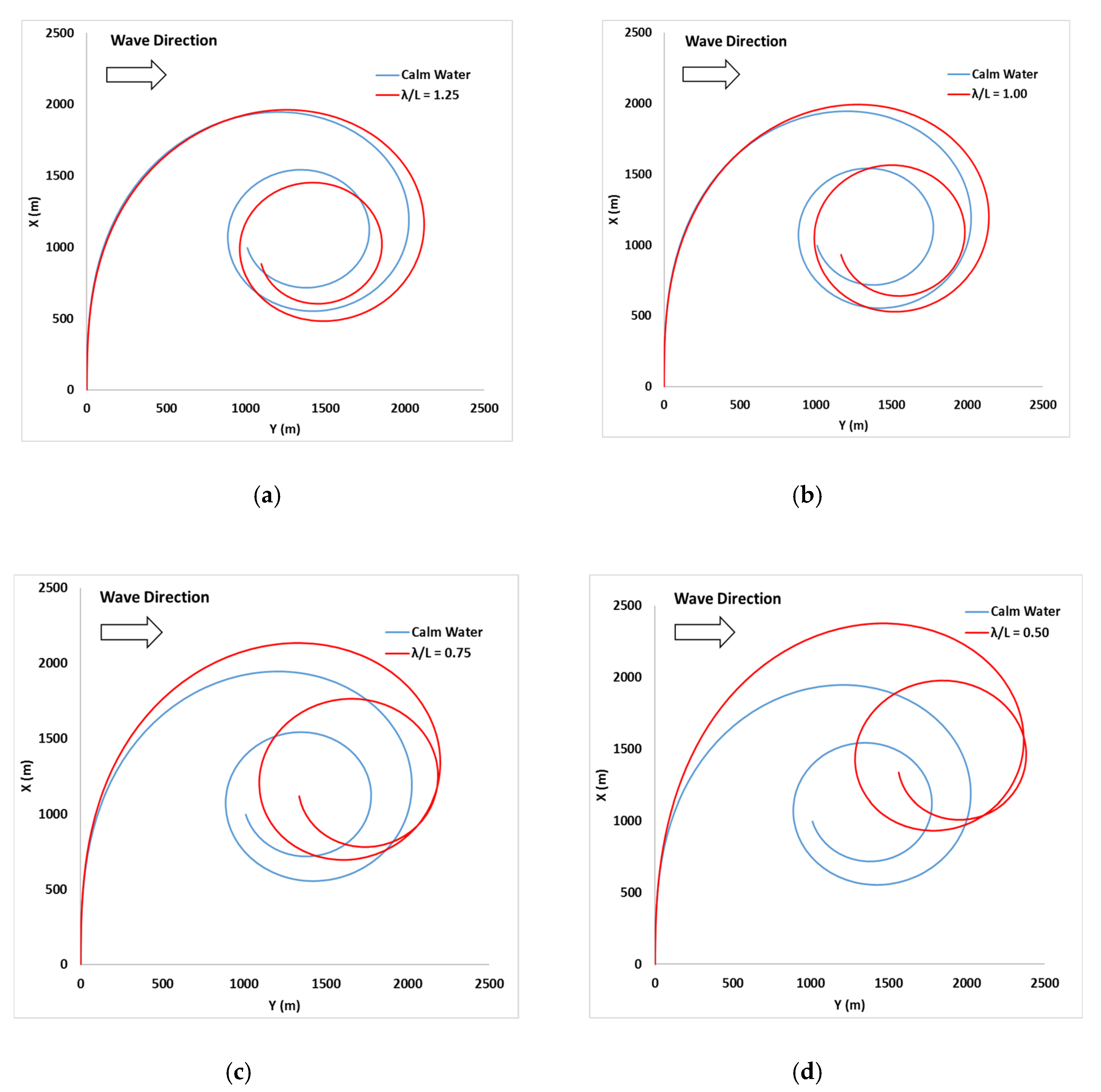
Figure 5 and
Figure 6 present the KVLCC’s turning trajectories in regular waves with starboard rudder of 35 degrees. In calm water, the turning trajectory will converge to a stable circle after continuous turning. Compared with the turning trajectories in the calm water, the wave drift loads coupled with wave drift damping drives the vessel turning trajectories to present a horizontal shift path, instead of the stable converged circle. It can be seen that as the wave length decreases, this drifting path is more obvious.
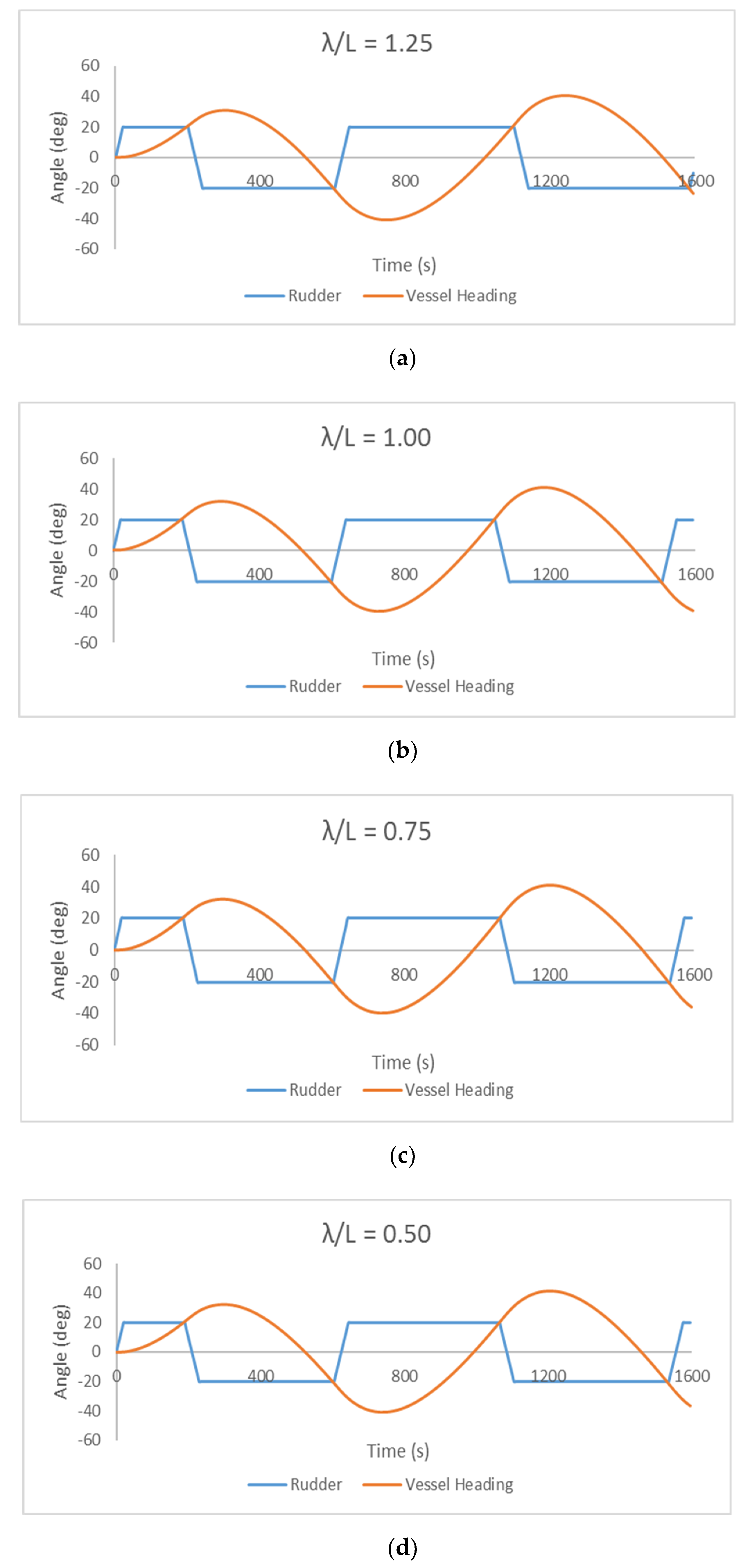
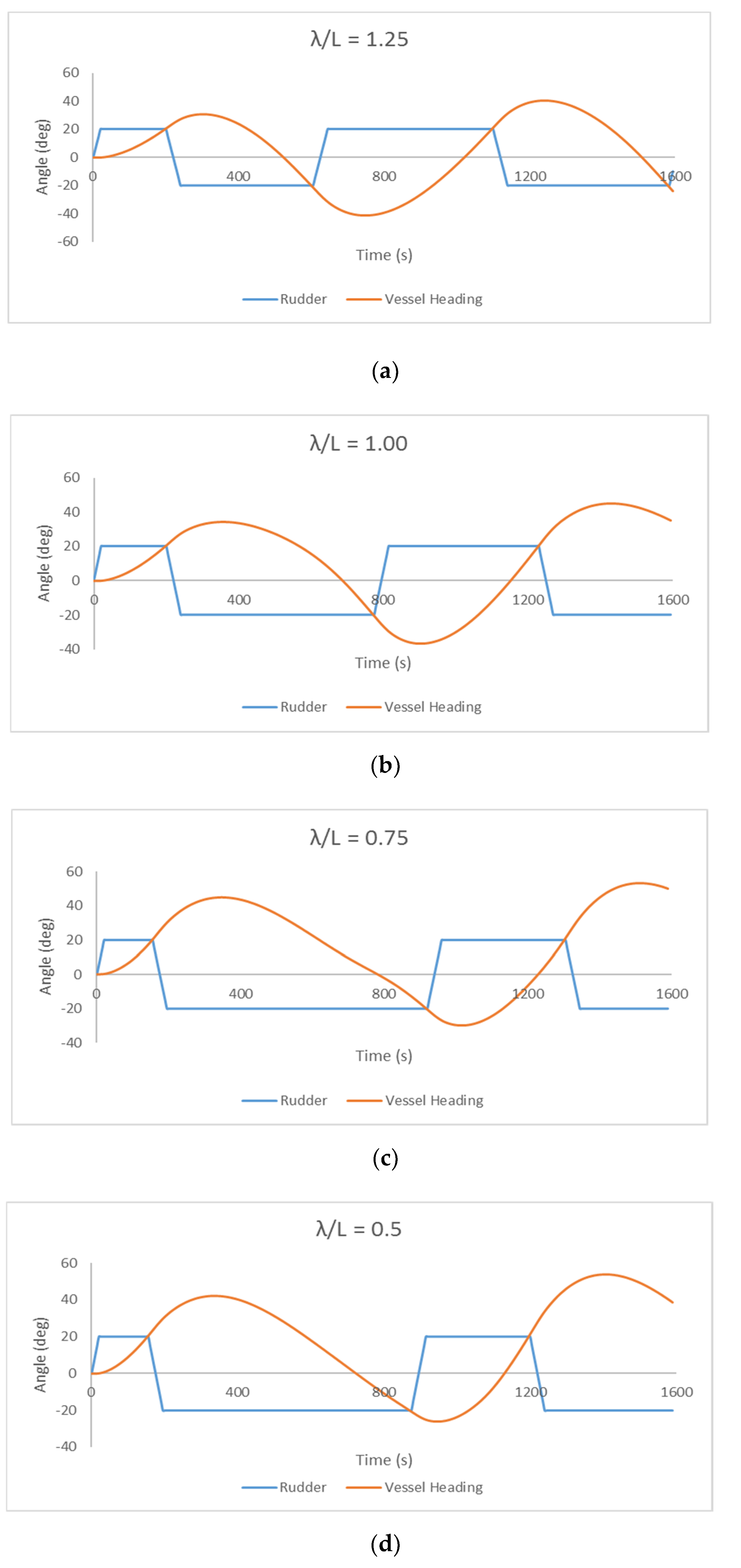
Figure 7 and
Figure 8 present the 20/20 deg zig-zag turning test in regular waves with various wave lengths. Compared with the cases in heading sea at the beginning point where the vessel heading presents symmetry characteristic about positive and negative headings, the vessel heading in the cases of beam sea at the starting point presents asymmetric characteristic. In
Figure 7, it can be observed that the period of the rudder angle fixed at the 20 deg presents an increasing trend with the zig-zag round. When the wave length is equal to the vessel length in
Figure 7b, the vessel turning rate is higher than the cases with other wave lengths. In
Figure 8, as the wave length decreases in beam sea, the period of the fixed rudder angle is unbalanced about the positive and negative sides, presenting an asymmetric characteristic.
As shown in
Figure 9,
Figure 10,
Figure 11,
Figure 12 and
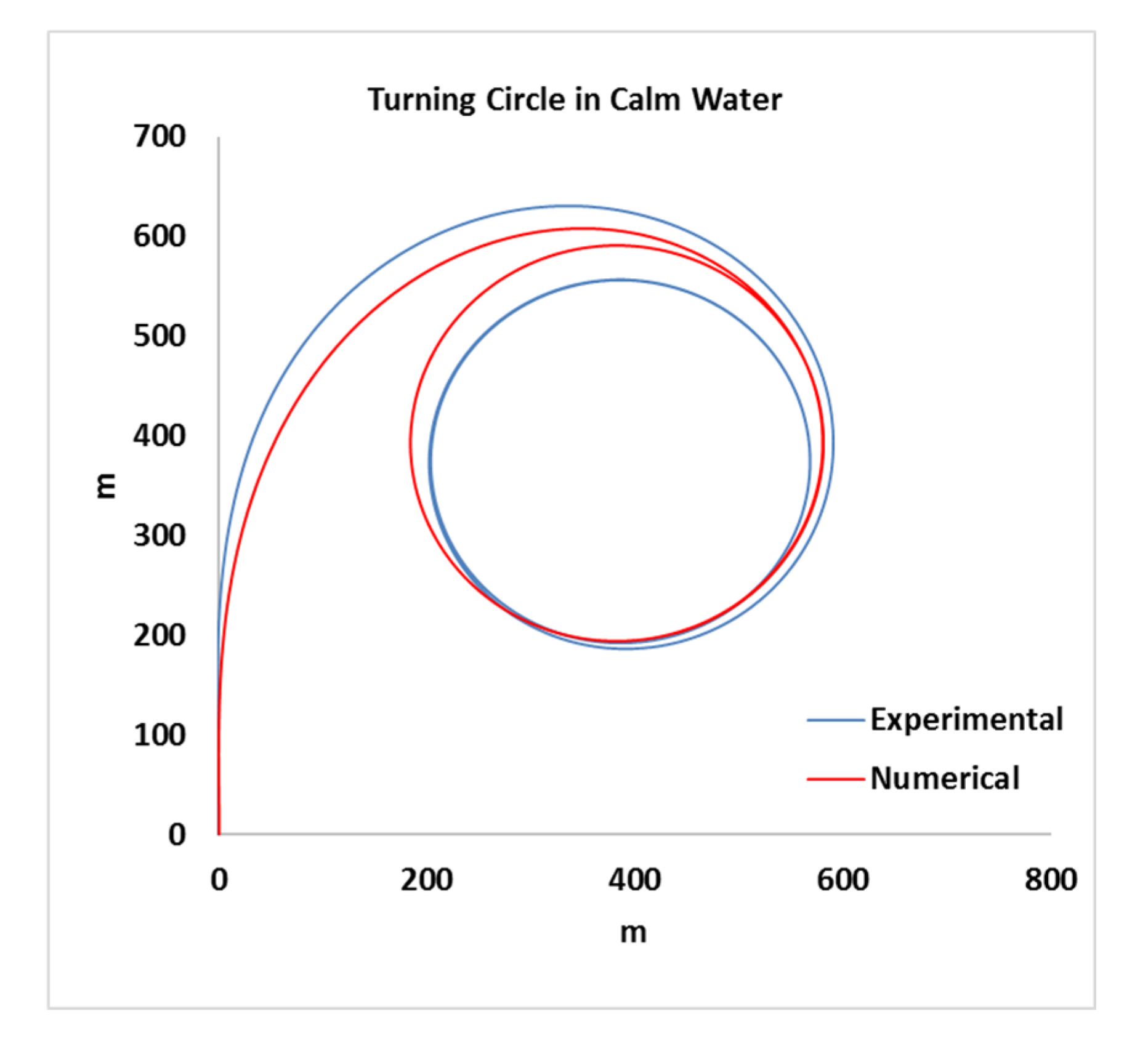
Figure 13, the numerically simulated turning trajectories for the KCS vessel have been presented and compared with the model test results in both calm water and regular waves.
In calm water, as can be seen in
Figure 9, the numerically simulated turning trajectory shows an excellent match with the experimental results, providing a convincing comparison basis: the diameter of the turning circle through the numerical simulation is 397.3 m, only 8.64% higher than that of the model test, which is 365.7 m.
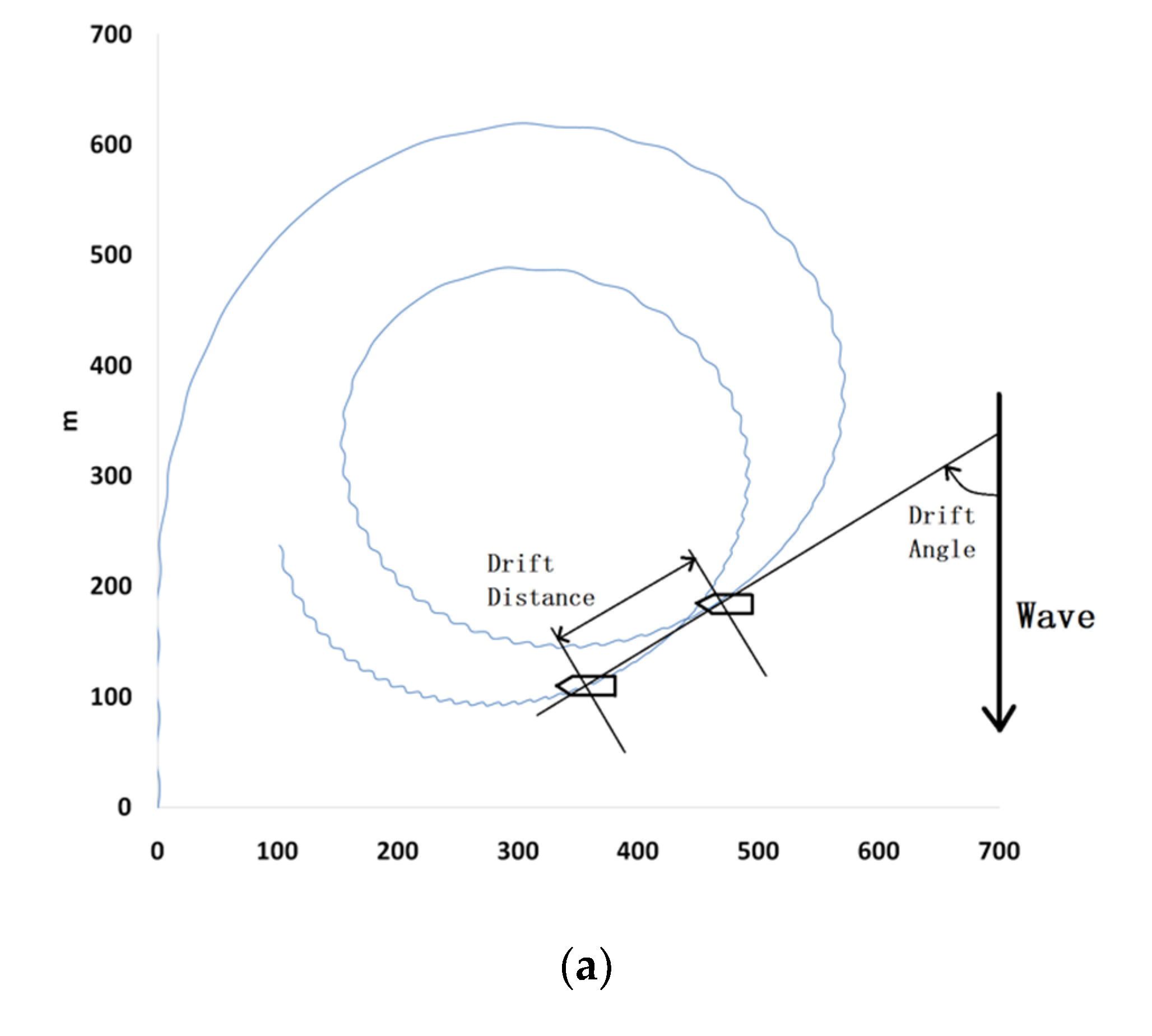
To precisely describe the turning trajectories in waves, multiple parameters including the diameter, the drift angle and the drift distance have been selected in present study. The drift angle is defined as the angle between wave propagating direction and vessel traveling direction in which the wave encounter angle is −90 deg, while the drift distance is defined by successive positions with a wave encounter angle of −90 deg [
2]. Two measures of diameter have been considered, namely the diameter measured along with the wave direction (V1 and V2) and the diameter measured perpendicular to the wave direction (H1, H2). These parameters are illustrated in
Figure 10.
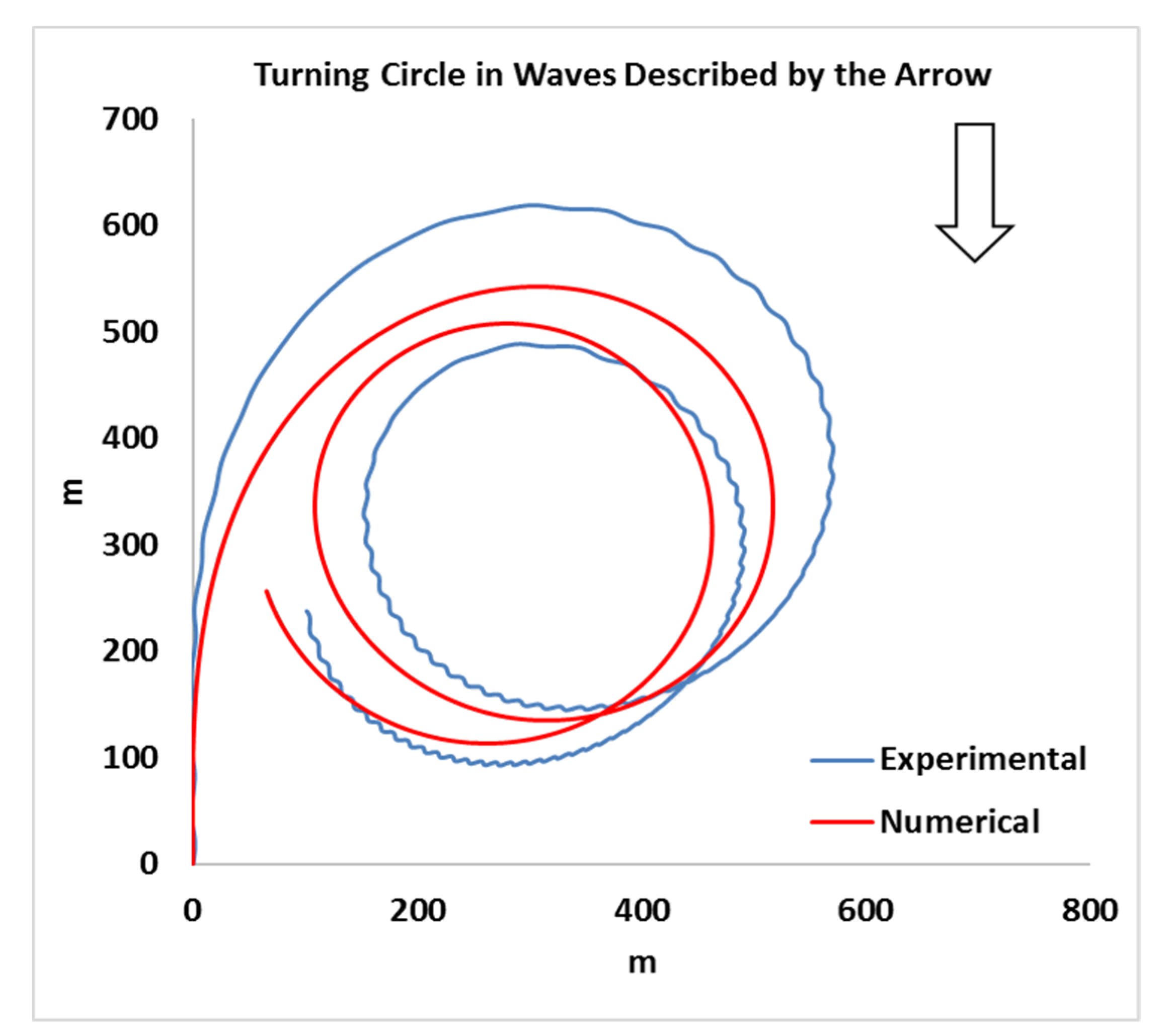
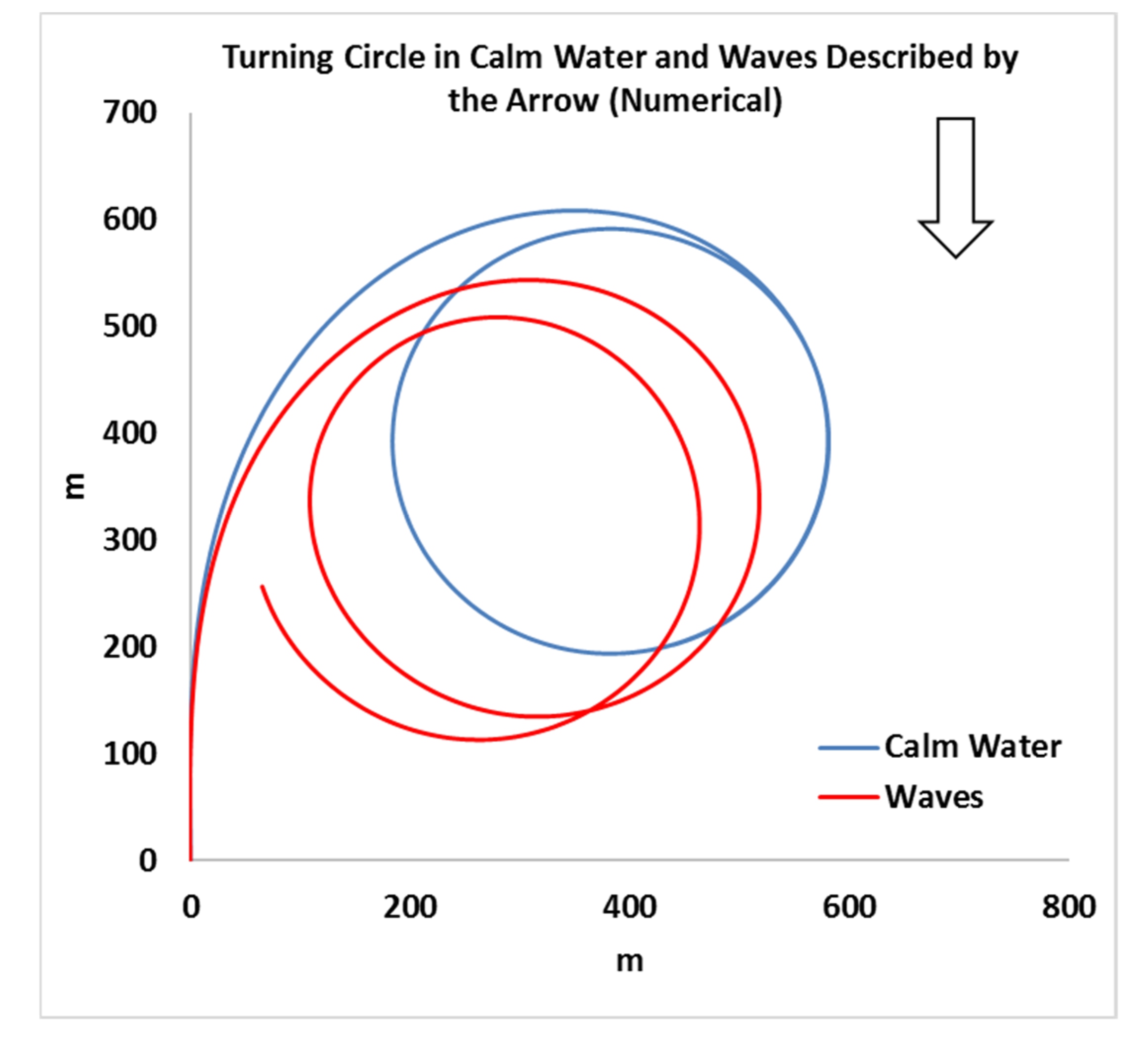
In
Figure 11,
Figure 12 and
Figure 13, a turning trajectory that presents a horizontal shift path due to the waves is observed in the KVLCC model and can also be observed in both the KCS model’s numerical and experimental results. It can be seen in
Figure 11 that there is a relatively obvious trajectory shift at the early stage between the numerical and experimental results, which leads to the difference of the corresponding drift angle and drift distance. A similar shift between these two methods can be also found in the calm water results as shown in
Figure 9. One reason for this phenomenon is the physical model’s sensitivity to the rudder, which contributes to the discrepancy of the horizontal hydrodynamic loads due to the rudder perturbations, and leads to a shift between the numerical and experimental trajectories. Another reason is the variance of the wake fraction being dependent on the propeller side-wash angle [
30], which thus changes the propeller surge force in the model test, while this component was considered as a constant value in the numerical simulation.
Similar discrepancies between the model tests and numerical simulations can also be found in Zhang’s research [
7], as well as Lee and Kim’s research [
13] through the double-body linearization results with and without a vortex sheet. Also, this is the case in Chillcce and Moctar’s work [
14] who applied a RANS computer code to obtain calm water forces and a 3D RANKINE source method to consider the second-order wave forces. It should also be noted that the discrepancies between the numerical and experimental results in most recent research also increase in the later stage of the turning trajectory. As is the case in the present study, after the early stage of the turning trajectory, the numerical simulation matches well with the experimental data, accurately capturing the main turning trajectory’s drifting path. Moreover, the numerically simulated turning trajectory’s diameters have shown a good match with the model test within a 7% discrepancy as presented in
Table 1: the H1, V1, H2, and V2 present −2.47%, 6.94%, 0.65%, and −3.48% discrepancies from the model test, respectively.
Therefore, the current framework of coupling the seakeeping and maneuvering modules provides a practical and accurate numerical methodology through the experimental validation, to predict the unconstrained vessel’s maneuvering in waves. Compared with the most recent research [
7,
13,
14], this framework presents a comparatively accurate prediction of the later stage of the turning trajectory in waves. Moreover, with a thorough physical model and explanation of the second-order wave loads through the potential flow theory, this framework is numerically efficient, especially considering CFD’s current large requirement of computational resources [
4,
5,
6]. In the future research, the sensitivity of the physical model in this framework to various hydrodynamic and wave parameters can be conducted and extended for the design of vessels [
26,
31].
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}