Wave Energy Converter Power Take-Off System Scaling and Physical Modelling


 ,
,  , ,
, , 

Abstract
:1. Introduction
2. State-Of-The-Art
2.1. Types of PTO Systems
2.2. Scaling Laws
2.3. Experimental Scale Selection
3. Common Practices
3.1. Experimental Set-Ups
- Minimize unwanted friction;
- Minimize inertia of PTO components;
- Minimize tolerances between components;
- Use high quality industrial experimental equipment;
- Ensure rigidity of fixed components, unless flexibility/deformation is assessed;
- Use parts that are machine built and, eventually, are made of mechanically advantageous materials such as carbon fibre, aluminium or stainless steel;
- Reduce complexities.
3.2. Calibration Procedures
- Explore target PTO force values and velocities ranges;
- Apart from linear velocity, PTO’s oscillation motion should be assessed;
- Perform as many as feasible repetitions;
- Test, disassemble, reassemble and re-test;
- Keep the PTO rig unchanged when it is needed to be transferred from a dry-test facility to the wave tank;
- Possibly, daily re-check of sensors’ calibration (during actual tests in water).
3.3. Experimental Errors Evaluation
- For reducing Type A uncertainty, as many repetitions as feasible of calibration and actual tests should be done;
- For reducing Type B uncertainty, experimental set-up and equipment need to be improved or upgraded before carrying-out calibration;
- The evaluation of Type B uncertainty can be done by gathering detailed specifications of the equipment used and/or regression analysis;
- To assess uncertainties related to the PTO, typically, the combined uncertainty (), should be obtained. Following recognized formal practices, a specific formulation needs to be derived;
- For allowing the smallest expanded uncertainty value (), a certain minimum number of tests are required. It is recommended to choose a coverage factor in advance so to better plan the number of repetitions required during calibration and actual tests.
4. Case Studies
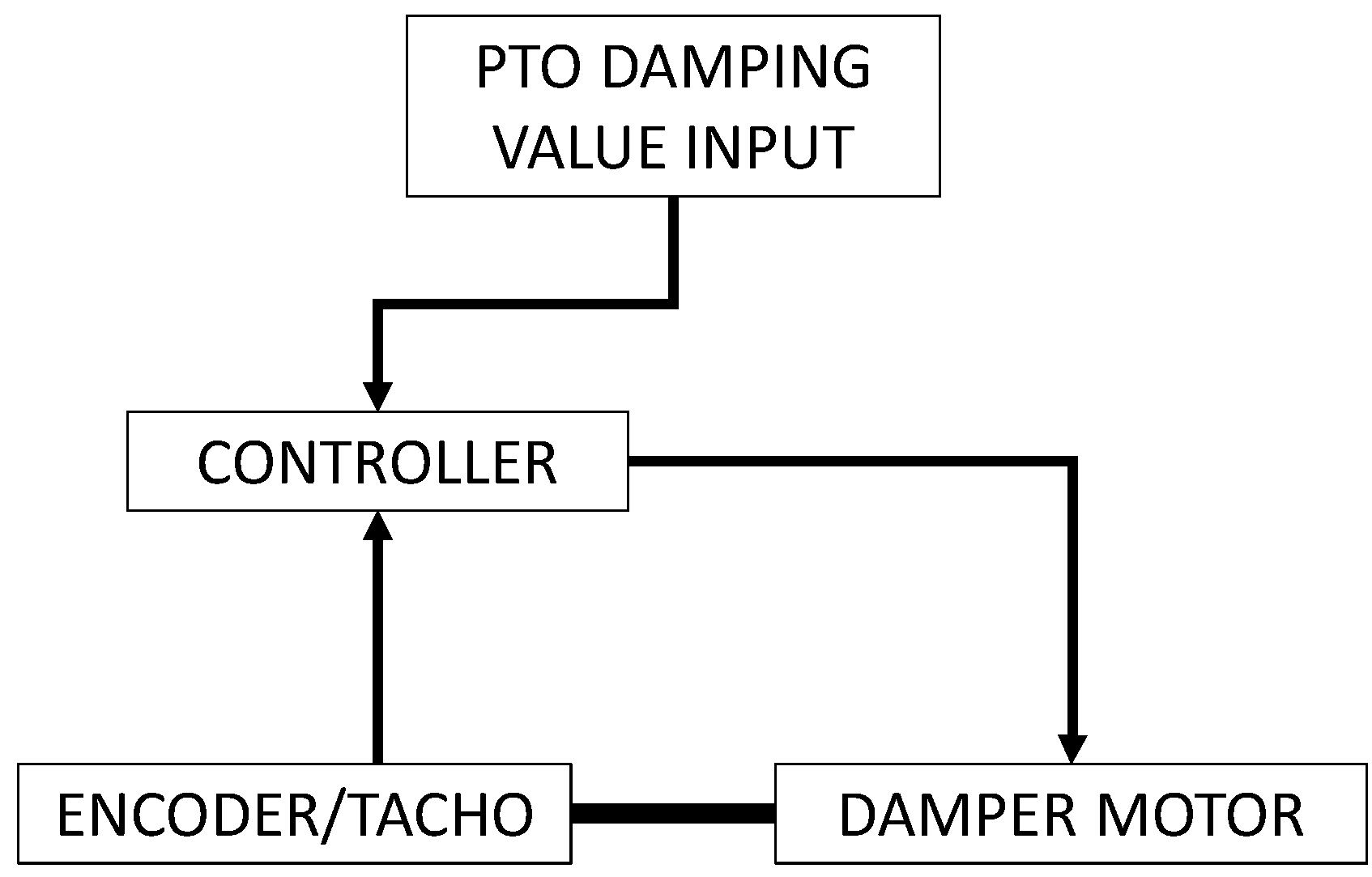
4.1. Case Study 1: Closed Control Loop PTO
4.2. Case Study 2: Eddy Current Based Electromagnetic PTOs
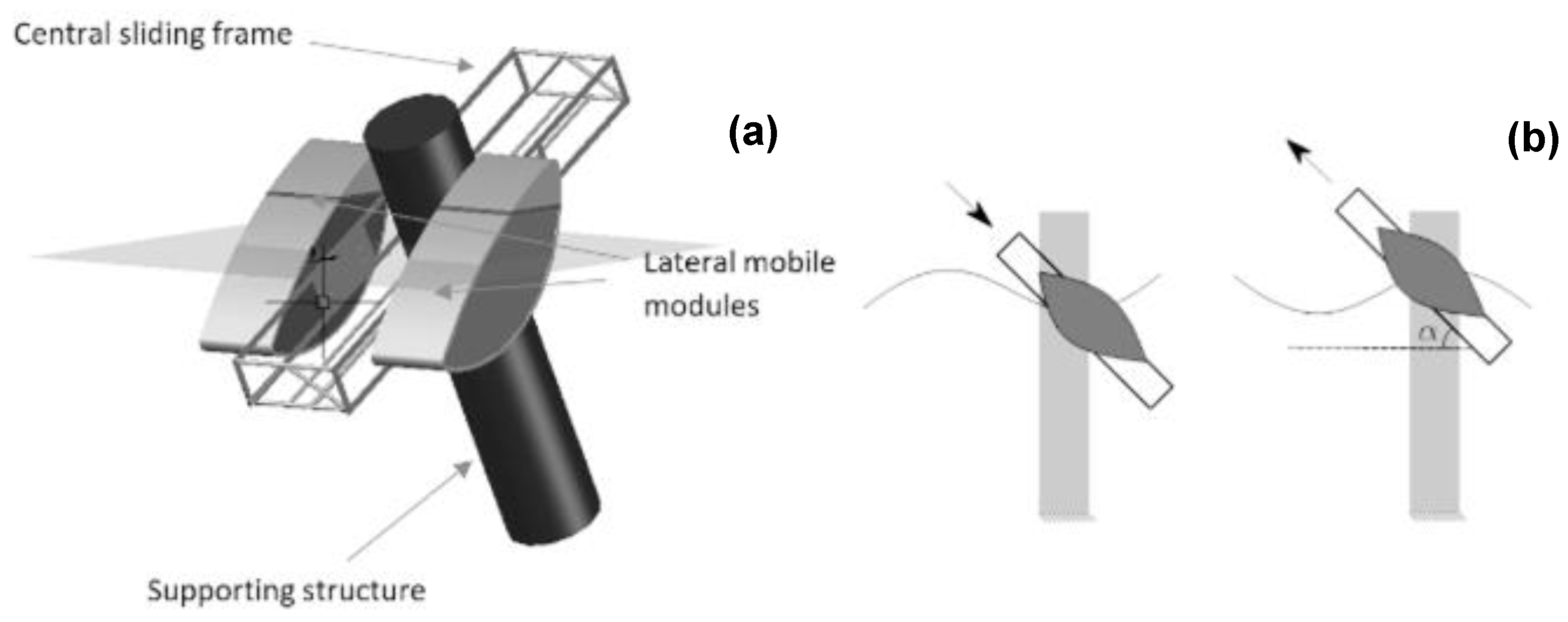
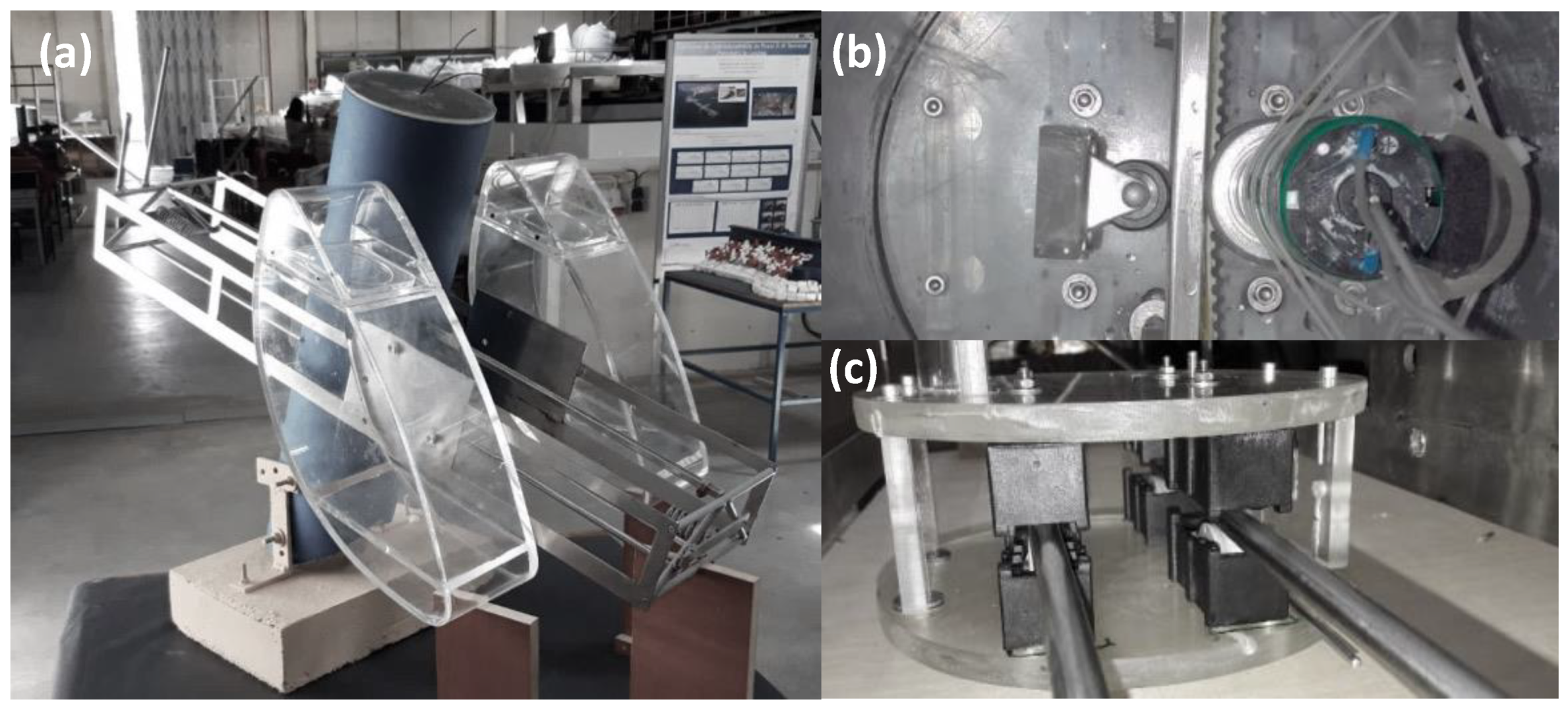
4.3. Case Study 3: CECO Experimental PTO Physical Model
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- De O. Falcão, A.F. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Cruz, J. Ocean Wave Energy Current Status and Future Perspectives; Springer Science & Business Media: Bristol, UK, 2008. [Google Scholar]
- Sheng, W.; Alcorn, R.; Lewis, T. Physical modelling of wave energy converters. Ocean Eng. 2014, 84, 29–36. [Google Scholar] [CrossRef]
- Beatty, S.; Ferri, F.; Bocking, B.; Kofoed, P.J.; Buckham, B. Power Take-Off Simulation for Scale Model Testing of Wave Energy Converters. Energies 2017, 10, 973. [Google Scholar] [CrossRef] [Green Version]
- International Towing Tank Conference. Uncertainty Analysis, Instrument Calibration. Available online: https://www.ittc.info/media/7979/75-01-03-01.pdf (accessed on 24 March 2020).
- International Towing Tank Conference. Testing and Extrapolation Methods Resistance Test. Available online: https://ittc.info/media/2019/75-02-02-01.pdf (accessed on 24 March 2020).
- Marine Renewables Infrastructure Network. WP2: Marine Energy System Testing—Standardisation and Best Practice Deliverable 2.11 Best Practice Manual for PTO Testing. 2015. Available online: http://www.marinet2.eu/wp-content/uploads/2017/04/D2.11-best-practice-manual-for-PTO-testing.pdf (accessed on 24 March 2020).
- Payne, G. Guidance for the Experimental Tank Testing of Wave Energy Converters. Available online: https://www.supergen-marine.org.uk/sites/supergen-marine.org.uk/files/publications/WEC_tank_testing.pdf (accessed on 24 March 2020).
- International Towing Tank Conference. Uncertainty Analysis for a Wave Energy Converter. Available online: https://www.ittc.info/media/8135/75-02-07-0312.pdf (accessed on 24 March 2020).
- European Marine Energy Cetre. Tank Testing on Wave Energy Conversion Systems. 2009. Available online: http://www.emec.org.uk/ (accessed on 2 March 2020).
- Viviano, A.; Naty, S.; Foti, E. Scale effects in physical modelling of a generalized OWC. Ocean Eng. 2018, 162, 248–258. [Google Scholar] [CrossRef] [Green Version]
- Falcão, A.F.O.; Henriques, J.C.C. Model-prototype similarity of oscillating-water-column wave energy converters. Int. J. Mar. Energy 2014, 6, 18–34. [Google Scholar] [CrossRef]
- Benreguig, P.; Murphy, J. Modelling Air Compressibility in OWC Devices with Deformable Air Chambers. J. Mar. Sci. Eng. 2019, 7, 268. [Google Scholar] [CrossRef] [Green Version]
- Falcão, A.F.O.; Henriques, J.C.C. Oscillating-water-column wave energy converters and air turbines: A review. Renew. Energy 2016, 85, 1391–1424. [Google Scholar] [CrossRef]
- Fleming, A.; Macfarlane, G. In-situ orifice calibration for reversing oscillating flow and improved performance prediction for oscillating water column model test experiments. Int. J. Mar. Energy 2017, 17, 147–155. [Google Scholar] [CrossRef]
- Xia, J.; Durfee, W.K. Analysis of Small-Scale Hydraulic Actuation Systems. J. Mech. Des. 2013, 135, 091001. [Google Scholar] [CrossRef] [Green Version]
- Jin, S.; Patton, R.J.; Guo, B. Viscosity effect on a point absorber wave energy converter hydrodynamics validated by simulation and experiment. Renew. Energy 2018, 129, 500–512. [Google Scholar] [CrossRef]
- Hinostroza, M.A.; Xu, H.T.; Guedes Soares, C. Manouvring test for a self-running ship model in various water depth conditions. In Proceedings of the 18th International Congress of the Maritme Association of the Mediterranean (IMAM 2019), Varna, Bulgaria, 9–11 September 2019. [Google Scholar]
- Payne, G.S.; Taylor, J.R.M.; Bruce, T.; Parkin, P. Assessment of boundary-element method for modelling a free-floating sloped wave energy device. Part 2: Experimental validation. Ocean Eng. 2008, 35, 342–357. [Google Scholar] [CrossRef] [Green Version]
- Beatty, S.J.; Hall, M.; Buckham, B.J.; Wild, P.; Bocking, B. Experimental and numerical comparisons of self-reacting point absorber wave energy converters in regular waves. Ocean Eng. 2015, 104, 370–386. [Google Scholar] [CrossRef]
- Ruehl, K.; Forbush, D.D.; Yu, Y.-H.; Tom, N. Experimental and numerical comparisons of a dual-flap floating oscillating surge wave energy converter in regular waves. Ocean Eng. 2020, 196, 106575. [Google Scholar] [CrossRef]
- Zurkinden, A.S.; Ferri, F.; Beatty, S.; Kofoed, J.P.; Kramer, M.M. Non-linear numerical modeling and experimental testing of a point absorber wave energy converter. Ocean Eng. 2014, 78, 11–21. [Google Scholar] [CrossRef]
- Vijayakrishna Rapaka, E.; Natarajan, R.; Neelamani, S. Experimental investigation on the dynamic response of a moored wave energy device under regular sea waves. Ocean Eng. 2004, 31, 725–743. [Google Scholar] [CrossRef]
- Chaplin, R.V. Seaweaver: A new surge-resonant wave energy converter. Renew. Energy 2013, 57, 662–670. [Google Scholar] [CrossRef]
- Neill, S.P.; Hashemi, M.R. Chapter 1-Introduction. In Fundamentals of Ocean Renewable Energy; Neill, S.P., Hashemi, M.R., Eds.; Academic Press: London, UK, 2018; pp. 1–30. ISBN 978-0-12-810448-4. [Google Scholar] [CrossRef]
- Giannini, G. Mooring Analysis and Design for Wave Energy Converters; University of Strathclyde Online Library: Glasgow, UK, 2018. [Google Scholar]
- Taylor, J.R.M.; Mackay, I. The Design of an Eddy Current Dynamometer for a Free-Floating Sloped IPS Buoy. Available online: https://pdfs.semanticscholar.org/4cb4/8aa54cd7bfb8583245e3f3d05cefd36d84a1.pdf (accessed on 24 July 2020).
- Lopes, M.F.P.; Henriques, J.C.C.; Lopes, M.C.; Gato, L.M.C.; Dente, A. Design of a non-linear power take-off simulator for model testing of rotating wave energy devices. In Proceedings of the 8th European Wave and Tidal Energy Conference (EWTEC), Uppsala, Sweden, 7–10 September 2009. [Google Scholar]
- Troch, P.; Stratigaki, V.; Stallard, T.; Forehand, D.; Folley, M.; Kofoed, J.P.; Benoit, M.; Babarit, A.; Gallach-Sánchez, D.; De Bosscher, L.; et al. Physical Modelling of an Array of 25 Heaving Wave Energy Converters to Quantify Variation of Response and Wave Conditions. In Proceedings of the 10th European Wave and Tidal Energy Conference, Aalborg, Denmark, 2–5 September 2013. [Google Scholar]
- Stratigaki, V.; Troch, P.; Stallard, T.; Forehand, D.; Kofoed, P.J.; Folley, M.; Benoit, M.; Babarit, A.; Kirkegaard, J. Wave Basin Experiments with Large Wave Energy Converter Arrays to Study Interactions between the Converters and Effects on Other Users in the Sea and the Coastal Area. Energies 2014, 7, 701–734. [Google Scholar] [CrossRef]
- EquiMar. Equitable Testing and Evaluation of Marine Energy Extraction Devices in terms of Performance, Cost and Environmental Impact. Available online: https://tethys.pnnl.gov/publications/equitable-testing-evaluation-marine-energy-extraction-devices-terms-performance-cost (accessed on 24 July 2020).
- Beyer, W. Handbook of Tables for Probability and Statistics, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Shahroozi, Z.; Eriksson, M.; Göteman, M.; Engström, J. Design and evaluation of linear and rotational generator scale models for wave tank testing. In Proceedings of the 4th International Conference on Renewable Energies Offshore (RENEW), Lisbon, Portugal, 12–15 October 2020. [Google Scholar]
- Sodano, H.A.; Bae, J.-S. Eddy Current Damping in Structures. Shock Vib. Dig. 2004, 36, 469. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez, C.A.; Rosa-Santos, P.; Taveira-Pinto, F. Hydrodynamic optimization of the geometry of a sloped-motion wave energy converter. Ocean Eng. 2020, 199, 1070468. [Google Scholar] [CrossRef]
- Rodríguez, C.A.; Rosa-Santos, P.; Taveira-Pinto, F. Experimental Assessment of the Performance of CECO Wave Energy Converter in Irregular Waves. J. Offshore Mech. Arct. Eng. 2019, 141. [Google Scholar] [CrossRef]
- Rosa-Santos, P.; Taveira-Pinto, F.; Teixeira, L.; Ribeiro, J. CECO wave energy converter: Experimental proof of concept. J. Renew. Sustain. Energy 2015, 7, 061704. [Google Scholar] [CrossRef]
- Marinheiro, J.; Rosa-Santos, P.; Taveira-Pinto, F.; Ribeiro, J. Feasibility study of the CECO wave energy converter. In Maritime Technology and Engineering; Informa UK Limited: London, UK, 2014; pp. 1259–1267. ISBN 978-1-138-02727-5. [Google Scholar] [CrossRef]
- Giannini, G.; Rosa-Santos, P.; Ramos, V.; Taveira-Pinto, F. On the Development of an Offshore Version of the CECO Wave Energy Converter. Energies 2020, 13, 1036. [Google Scholar] [CrossRef] [Green Version]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Scaling Law |
|---|---|
| Linear displacement | |
| Angular displacement | |
| Translational velocity | |
| Angular velocity | |
| Translational acceleration | |
| Angular acceleration | |
| Mass | |
| Force | |
| Torque | |
| Power | |
| Linear stiffness | |
| Angular stiffness | |
| Linear damping | |
| Angular damping | |
| Wave height and length | |
| Wave period | |
| Wave frequency | |
| Power density |
| Phase 1 Validation Model | Phase 2 Design Model | Phase 3 Process Model | Phase 4 Prototype | Phase 5 Full Size | |||
|---|---|---|---|---|---|---|---|
| Scale ( | 1:25–100 | 1:10–25 | 1:3–10 | 1:2 | 1:1 | ||
| Technology readiness level (TRL) | 1–3 | 4–5 | 6–7 | 8–9 | |||
| Testing environment | 2D flume and 3D wave tanks | 3D basin | Sheltered sea site (benign) | Exposed sea site | Open sea location | ||
| Duration of tests including analysis | 1–3 weeks | 1–3 months | 1–3 months | 6–12 months | 6–18 months | 12–36 months | 1–5 years |
| Typical no. of tests | 50–500 | 250–500 | 100–250 | 100–250 | 50–250 | continuous | statistical sample |
| Indicative budget (€,000) | 1–5 | 25–75 | 25–50 | 50–250 | 1000–2500 | 5000–10,000 | 2500–7500 |
| Conditions to test | Regular waves Up to 5 irregular sea states tests (unidirectional) | Irregular sea states (short and log crested, multidirectional sea states) | Pilot site sea spectra Long and short crested classical seas (multidirectional sea states) | Extended test at sea to ensure all seaways are included | Full evaluation | Full evaluation | |
| PTO system | PTO simulator | Miniaturized PTO | Real PTO | Certified PTO | |||
| Recommendation or Approach | Case Study 1 | Case Study 2 | Case Study 3 | |
|---|---|---|---|---|
| Experimental set-up | Minimize friction | V | V | V |
| Minimize inertia of PTO components | Na | Na | V | |
| Use of industrial-grade equipment | V | V | Na | |
| Ensure rigidity | V | Na | Na | |
| Use machined parts and advanced materials | V | V | V | |
| Reduce complexities | V | V | Na | |
| Calibration | Explore target PTO force and velocities values | V | V | V |
| PTO oscillation tests | V | Na | Na | |
| Test, disassemble, reassemble, and re-test | V | Na | V | |
| Keep the PTO rig as it is when moving in the wave tank | V | Na | V | |
| Errors estimat. | Informal error estimation | Na | Na | V |
| Formal uncertainty analysis methods | V | Na | Na |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giannini, G.; Temiz, I.; Rosa-Santos, P.; Shahroozi, Z.; Ramos, V.; Göteman, M.; Engström, J.; Day, S.; Taveira-Pinto, F. Wave Energy Converter Power Take-Off System Scaling and Physical Modelling. J. Mar. Sci. Eng. 2020, 8, 632. https://doi.org/10.3390/jmse8090632
Giannini G, Temiz I, Rosa-Santos P, Shahroozi Z, Ramos V, Göteman M, Engström J, Day S, Taveira-Pinto F. Wave Energy Converter Power Take-Off System Scaling and Physical Modelling. Journal of Marine Science and Engineering. 2020; 8(9):632. https://doi.org/10.3390/jmse8090632
Chicago/Turabian StyleGiannini, Gianmaria, Irina Temiz, Paulo Rosa-Santos, Zahra Shahroozi, Victor Ramos, Malin Göteman, Jens Engström, Sandy Day, and Francisco Taveira-Pinto. 2020. "Wave Energy Converter Power Take-Off System Scaling and Physical Modelling" Journal of Marine Science and Engineering 8, no. 9: 632. https://doi.org/10.3390/jmse8090632
APA StyleGiannini, G., Temiz, I., Rosa-Santos, P., Shahroozi, Z., Ramos, V., Göteman, M., Engström, J., Day, S., & Taveira-Pinto, F. (2020). Wave Energy Converter Power Take-Off System Scaling and Physical Modelling. Journal of Marine Science and Engineering, 8(9), 632. https://doi.org/10.3390/jmse8090632