1. Introduction
Decision-making and responsiveness are the navigator’s primary activities in avoiding collisions at sea. Due to the reduced number of the crew on the bridge, the amount of information required per person has increased, which adds a burden to the decision-making process. The decision is also influenced by the traffic situation, weather conditions, and, finally, the navigator’s experience. Vessel avoidance has additional peculiarity as the navigator has extensive knowledge of his vessel and limited information of the vessels in the vicinity, which means that he/she makes decisions in an uncertain environment [
1]. The automation of navigation devices has brought a new approach to maritime safety in maritime affairs and, at the same time, changed the nature of human error [
2]. An essential cognitive aspect of the problem of automation is: How does the human brain process certain information? How much data is a person able to receive at one time? How should the information be displayed so that a person can receive it in the correct form and use it for further decision-making?
The improvement of maritime safety in the 1970s was mainly due to the upgrade of navigation radar with the Automatic Radar Plotting Aid (ARPA), a support decision-making tool for collision avoidance at sea. Above all, it shortened the time of collision risk assessment and increased the navigator’s situation awareness. Although ARPA contains a lot of information about vessels in the area and a Trial Manoeuvre tool to simulate collision avoidance using a time delay command, there are standard limitations and errors that radars have, especially regarding the processing time of the received signal [
3]. According to the International Maritime Organization (IMO) requirements, the ARPA radar must display, in one minute and with 95% accuracy, the relative motion (relative course and speed) and DCPA (Distance to Closest Point of Approach) of the target vessel; within three minutes, record the overall trend of the target vessel—relative and true course, relative and true speed, DCPA, and TCPA (Time to Closest Point of Approach). Therefore, it is advisable to use these data from the Automatic Identification System (AIS) device since they are updated, on average, every 30 s (depending on the vessels’ speed and course change). Both ARPA radar and AIS are currently integrated into the Electronic Chart Display and Information System (ECDIS) and the navigator has a lot of information available on a single screen. However, the Trial Manoeuvre tool for planning collision avoidance at sea still requires manual adjustments which, in turn, means extending decision-making time in a situation that requires a dynamic decision-making process. There are also no integrated COLREG rules in the system itself, and their application is left to the knowledge of the person steering the vessel.
To relieve the navigator of the glut of information of today’s technology used onboard vessels, in 2009, IMO issued a Strategy for the Development and Implementation of E-Navigation (MSC85-Report, Annexes 20 and 21). The goal of E-Navigation development is to improve maritime safety by integrating existing and new navigation devices in a structured manner, simplifying processes to prevent information overload and increase safety by aggregating information into those which are genuinely relevant for the navigator [
4]. The task of the navigation decision system, besides its information function, is to supply solutions—determination of safe vessel trajectories in the process of collision avoidance. Decision systems consist of several components, including components for collision risk assessment and avoidance manoeuvre calculation. Quantitative methods of calculating the collision risk could primarily include the calculation of the CPA point. As it represents the distance to the closest point of approach, it is the first indicator of the possibility of a collision or entry into the area of the safe vessel’s domain. A vessel’s safety domain is the sea area around the vessel, which must remain free from other vessels and fixed installations. In some ARPA radars, the PAD method (Predicted Area of Danger) can also be found to show the collision estimate, which, unlike the CPA method, also takes into account the dimensions of both vessels, course, and speed [
5,
6]. Most of the early vessel’s safety domain developments were created by statistical and analytical methods, and oval and elliptical shapes predominated. In recent times, however, we find models that change dynamically according to different navigation situations: vessel size, traffic density, relative speed, type of navigation situation, weather conditions, visibility, etc. [
7,
8]. According to Cockcroft [
9], the size of a vessel’s domain cannot be quantified, but it is suggested that in degraded visibility, this is limited to 2 M. However, it may be lower at low speeds in heavy traffic, in an overtaking situation, or when the observed vessel is expected to sail aft. In practice, this area is determined subjectively by the navigator, or it is determined by the shipowner or another person/institution responsible for it. If there is a risk that another vessel will enter the vessel’s domain, an appropriate collision avoidance manoeuvre is required in accordance with the COLREG rules.
Many researchers are engaged in the development of the collision avoidance systems. Models of research may be divided into three main categories: mathematical models and algorithms, soft computing (the evolutionary algorithms, neural networks, fuzzy logic, and expert systems), and a combination of all—a hybrid navigation system [
10]. The decision model, which determines the appropriate collision avoidance manoeuvre based on fuzzy logic, was introduced by several authors, among them Perera [
6], who primarily shed light on situations occurring on the high seas when a vessel is in a critical position in relation to another vessel and must perform the collision avoidance manoeuvre. The simulation was tested using MATLAB’s Fuzzy Logic Toolbox using the Mamdani fuzzy inference system. In setting rules (144 rules in total), the author specified five input parameters: the region where the target vessel is located; the relative course of the target; the level of encounter risk; the distance to the target, and the relative speed of approach. Based on these parameters, the model decided on the need to change course or speed based on COLREG rules 13, 14, and 15. In the following article [
11], they tried to solve the problem of avoiding multiple vessels by combining fuzzy logic and the graphical probability model—Bayesian networks. Later, fewer input parameters were used to find the appropriate avoidance manoeuvre for the fuzzy inference system: distance to the target vessel, azimuth, relative course, and speed of approach [
12]. Selection of the navigation strategy in traffic separation scheme, using a decision model based on a fuzzy logic algorithm was proposed by Wu [
13], who analysed the dynamic characteristics of the navigation process. With a similar fuzzy logic approach the risk of collision with static and moving objects was calculated [
14,
15]. Zhuo et al. [
16] calculated, in their model, the start time of the manoeuvre by altering the course by 30° in relation to the target vessel at 0.8 nautical miles (M). A similar approach to collision avoidance was taken by Su et al. [
17] who calculated the position of own vessel to initiate avoidance for different rudder deviations. An attempt to find the optimal avoidance path was presented by Pietrzykowski [
18], where an optimal control method was used for vessel motion: a multi-stage fuzzy control in combination with the Dijkstra algorithm for determining the shortest path. Using a combination of fuzzy logic and neural networks, Liu [
19] calculated the direction and magnitude of own vessel course change and the time at which the alteration began. In doing so, they used input parameters with different navigation situations (COLREG rules 13, 14, and 15) and the speed ratio between the own and the target vessel. The vessel’s trajectory in collision avoidance situations was also the basis for research by Szłapczyński [
20], who used the technique of evolutionary algorithms that allow the navigator to predict the trajectory of the target vessel and thus plan its manoeuvre. In a congested traffic area, this method would also allow the VTS (Vessel Traffic System) operator to coordinate the movements of all vessels. More complex hybrid systems for autonomous navigation were presented by Lee et al. [
21] and Hu [
22]. They, in addition to using fuzzy logic, also introduced a Virtual Force Field (VFF) known in the field of mobile robotics.
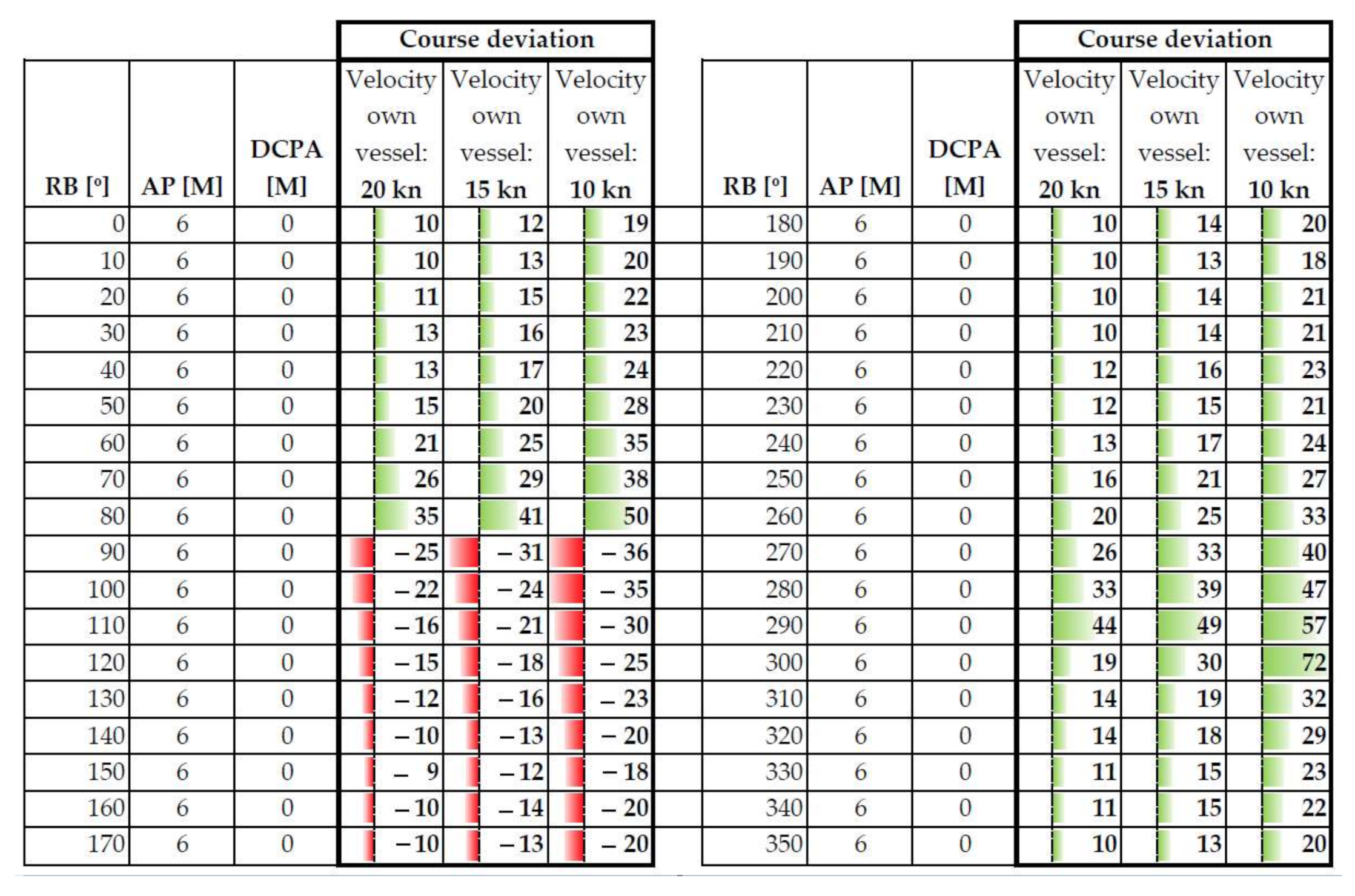
In this paper, a collision avoidance decision model is proposed, based on fuzzy logic which calculates course alteration using four parameters. The model is considered as an upgrade of the current Trial Manoeuvre tool in ARPA radar, which is used to plan collision avoidance manoeuvres. The model structure and the rule-based system are built using a database of correct solutions, obtained by manual radar plotting method. This presents a novel approach in determining fuzzy parameters and rules. Additionally, two important segments of collision avoidance are considered in the model:
the direction of avoidance (in compliance with COLREG rules 8 and 19), and
the minimum course alteration (in compliance with COLREG rule 8).
The quality of the execution of the avoidance manoeuvre is, thus, not only in achieving a safe distance for the passage of vessels but also in the process of manoeuvring.
The paper is structured as follows.
Section 2 provides a brief introduction to the methodology of fuzzy logic;
Section 3 describes the design of the decision model in a two-step sequence, which also represents the originality of this study. Each step is described in more detail in sub-sections defining input parameters, the fuzzy inference system with its fuzzy rules and the output decision of the decision model.
Section 3 presents six selected case studies that simulate different navigation situation encounters. In
Section 4, the presented case studies are discussed, followed by the conclusion.
2. Fuzzy Logic Methodology
The literature review presented several methods for calculating the collision avoidance manoeuvre. The proposed decision model uses fuzzy logic, which belongs to the techniques of artificial intelligence. The advantage of fuzzy logic is that decisions can be made based on inaccurate data that cannot be described in mathematical notation because they are expressed in words. Zadeh [
23] justified the numerical methods of fuzzy logic by claiming that humans perceive events in their environment inaccurately and without a precise distribution law. Fuzzy logic thus imitates the human way of thinking, which can solve complex tasks, although they may also contain a great deal of uncertainty. Other advantages to using fuzzy logic for a decision model are its ease of use and transparency, which were two essential features when choosing this technique. Fuzzy computing has also proven to be a very widespread technique in other areas of transport; some such examples were cited by Teodorović [
24]: solving the problem of vehicle routing, route selection or timetable optimisation in various transport industries, regulation of traffic lights, etc.
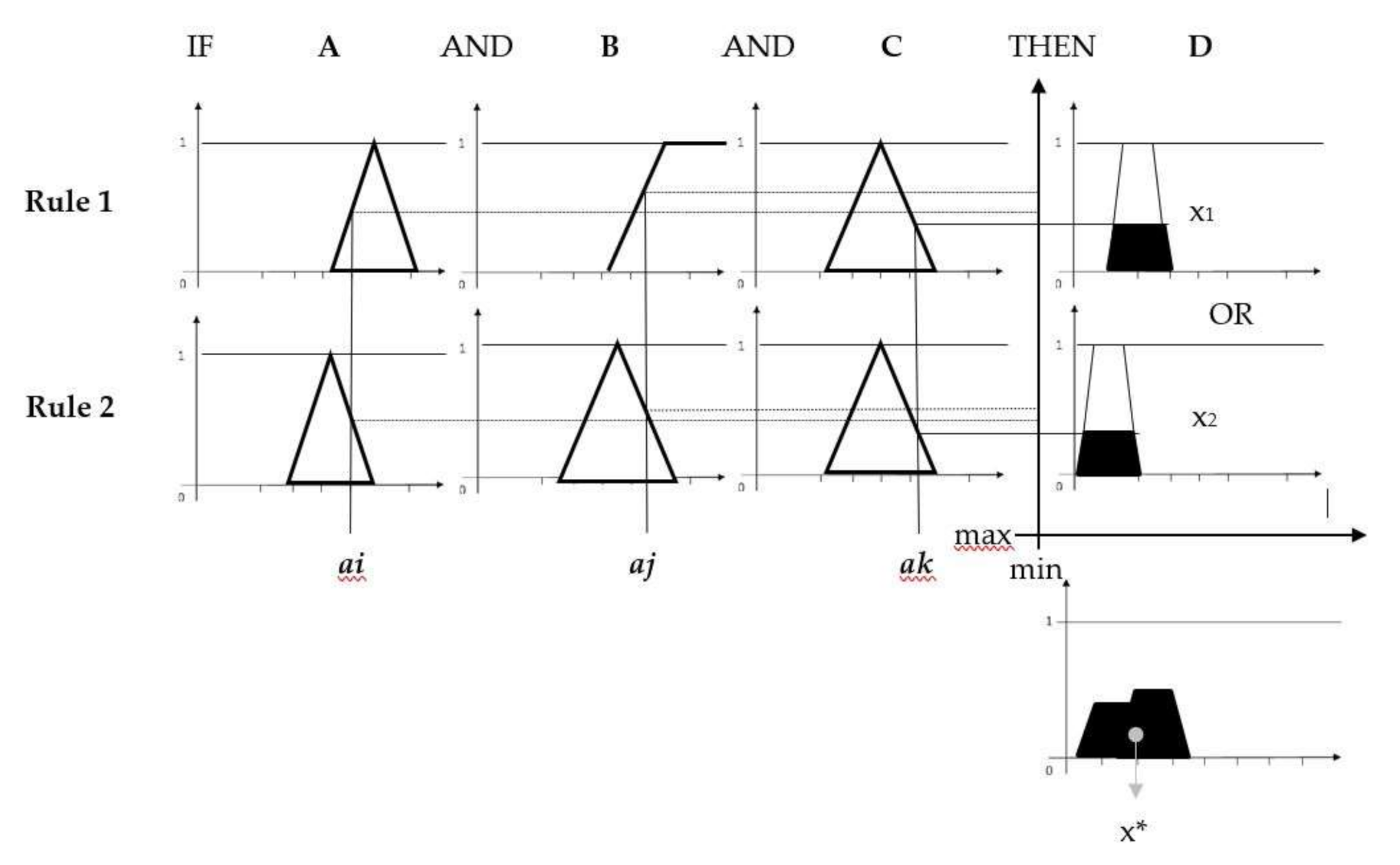
Fuzzy inference system (FIS) is the process of formulating the mapping from a given input to output using fuzzy logic. It is one of the main elements of the fuzzy logic system. The FIS type in this paper is “Mamdani”. The use of the IF-THEN rules is organised with the “AND (min)” and “OR (max)” operators. Therefore, the basic tasks of the fuzzy inference system (FIS) are fuzzification, fuzzy reasoning and defuzzification. Fuzzification is a procedure in which the input data is placed in an appropriate set, which is at the same time a linguistic variable, and the grade of membership is determined. The mathematical logic theory assumes only correct and incorrect statements; in fuzzy logic, however, an element belongs to a set with a certain grade of membership (µ
x). Fuzzy sets have different shapes; in the literature, triangular and trapezoidal are commonly used, represented by mathematical notation:
Fuzzy reasoning or the process of mapping input data to output decision is performed with a base of rules formed by IF–THEN conditional statements. Defuzzification is the last step in FIS and is a conversion of fuzzy output quantities into a crisp output quantity. For each unit of input and output data, a degree of membership in the corresponding fuzzy set is assigned. A common mapping is multiple inputs to one output, but there can also be multiple outputs. The greater their number, the greater the number of fuzzy rules in the system which, unfortunately, also affects its transparency. The decision model uses the Mamdani fuzzy inference type. A characteristic of this type is that both inputs and outputs are interpreted with linguistic variables connected by the fuzzy operators “min” and “max”. The value of a linguistic variable is also called fuzzy value, which describes belonging to a certain fuzzy set [
25]. Fuzzy logical operators are defined as follows:
AND (“min”)—fuzzy cross section or conjunction,
OR (“max”)—fuzzy union or disjunction,
NOT—fuzzy complement.
The membership function of the output data D has a form (
Figure 1):
which means that the input data are combined with the “min” function:
and the output data is combined with the “max” function:
The latter calculates the sum of all outputs, thus obtaining a shape representing a fuzzy set of all output data. A commonly used data sharpening method is the “centre of gravity” method, which is calculated by
The input parameters and the output decision, the composition of the fuzzy membership functions for each input and output, and the fuzzy rules that perform the process of fuzzy reasoning are presented in the following sections.
4. Simulations
The simulations’ aim is to demonstrate the quality of the operation of a multi-parametric collision avoidance decision model. There are countless possible situations of encounters at sea; Perera [
6] presented, in his article, simulations of encountering a single vessel from different relative bearings: 63, 30, 106, 1, and 296° at distances between 7 and 14 M. This covered all three navigation situations according to the COLREG rules—crossing, overtaking, and head-on. A similar simulation was presented by Ni [
32], using multiple generic algorithms and a linear extension algorithm for trajectory planning for different navigation situations on the open sea, and Nguyen [
33], in constrained waters in a multi-encounter vessel situation. Zhuo [
16] simulated an encounter with three vessels simultaneously located at relative bearings 50, 325, and 2° in a crossing and head-on situation. A similar situation is simulated by Pietrzykowski [
18]. Lee et al. [
21] considered crossings from the starboard side direction, concerning its own vessel (approach from the direction of relative bearing 30–50° and 90–140°), from portside direction (approach from the direction of relative bearing 300–330° and 220–270°), and overtaking situation.
Another important aspect of collision avoidance at sea is the vessel’s safety domain. The authors, who solved the problem of avoiding collisions at sea comprehensively, mostly used a simple radar circle in the model for a safety domain: Zhang [
34] determined the radius of the 1500 m (0.8 M) circle for the safe ship domain, while Pietrzykowski [
35] and Szłapczyński [
36] used a 1 M circle in the simulations. Zhuo [
16] also considered the dimensions of his own and observed ship in the size of the circle. Some authors used simple ellipses, where the size of the large strip was determined by the length of the ship (2× the length of the ship) and the small strip by the width of the ship, 2–4× the breadth of the ship [
33,
37]. Many authors did not specifically define domain size in decision models, among them Hwang [
38], Perera [
6], and Hu [
39], or they chose the minimum encounter distance [
8,
40,
41,
42]. Based on those findings, the minimum vessel’s safety domain in the presented model is assumed to be 1 nautical mile.
The validation was made using the six selected cases, which simulate encounters with the target vessel on the open sea from different angles in any visibility: head-on, crossing, and overtaking situations and different right of way. Observed criterion simulations are collision avoiding in accordance with COLREG and minimum vessel’s safety domain. Moreover, since the simulations are focused on the vessel’s navigation on the open sea, the influence of the navigational behaviour and environmental impacts (wind and currents) are ignored in the modelling process.
4.1. Application of the Proposed Model, Case Study 1 (Overtaking Encounter)
Following is a detailed explanation of decision model calculation (
Table 2,
Table 3,
Table 4 and
Table 5). The simulation tests the fuzzy inference system for the encounter situation with target vessel. This situation is governed by COLREG rule 14, the “Head-on situation”, rule 8 “Action to avoid collision”, and rule 19 “Conduct of vessels in restricted visibility”. Both vessels are power-driven. It is assumed that the target vessel keeps her course and speed.
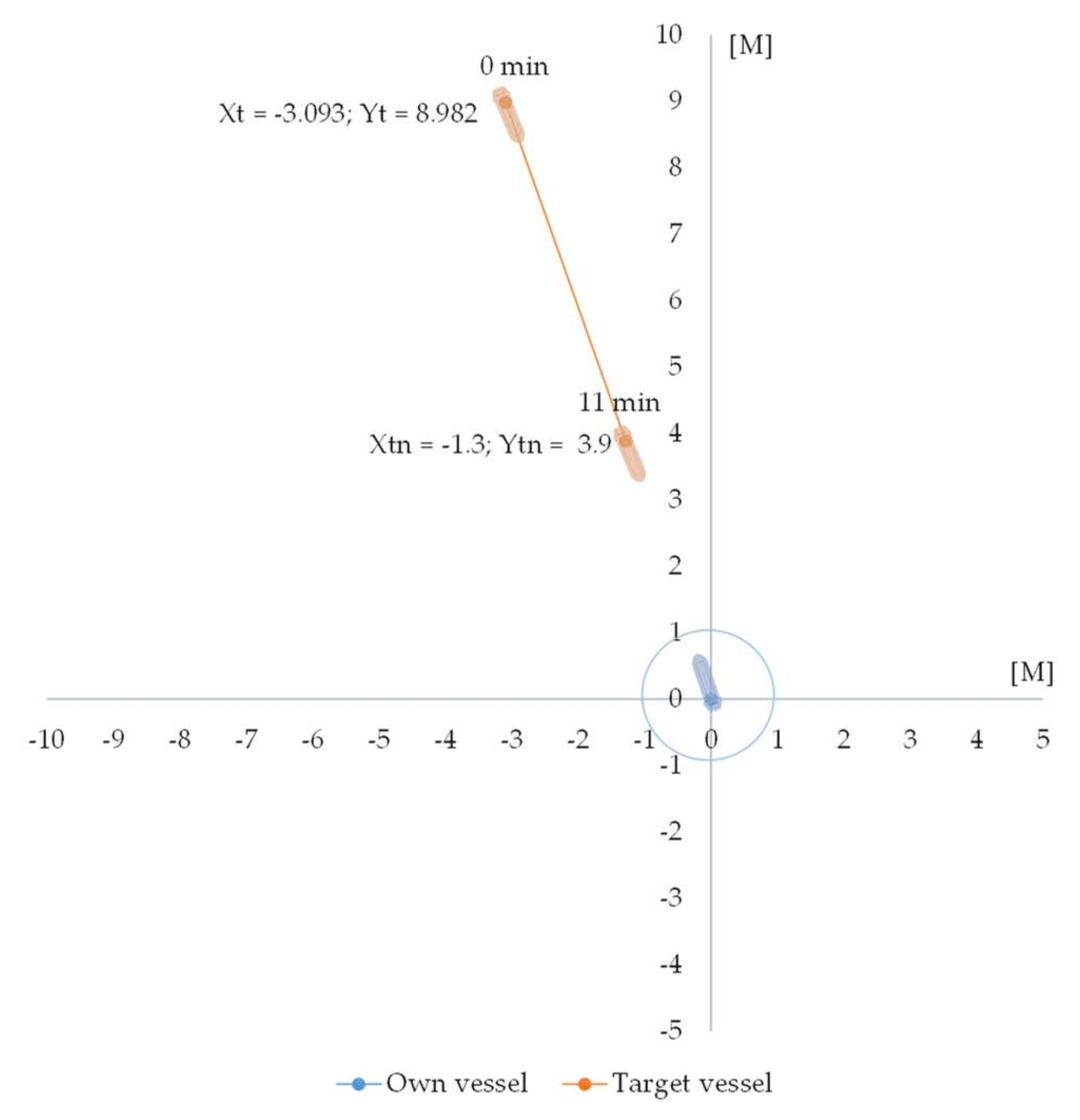
Figure 7 shows a relative movement of the target vessel in a time delay. The next task is to classify the input parameters into fuzzy sets and calculate the grade of membership. This process is called fuzzification:
Explanation: DCPA +0.09 M belongs to the fuzzy set »Centre« with grade of membership 1.
Explanation: Distance to target vessel 4.09 M belongs to the fuzzy set »Near«, with grade of membership 0.91, and fuzzy set »Middle«, with grade of membership 1.
Explanation: RB 1.739° belongs to the fuzzy set »Stbd Bow« with grade of membership 1.
Explanation: Own vessel’s velocity 16.5 kn belongs to the fuzzy set »Normal« with grade of membership 0.875 and fuzzy set »High« with grade of membership 1.
The second task is the activation of the FIS based on fuzzy rules (
Table 6). Since input parameters
AP and
V belong to two fuzzy sets, respectively, four fuzzy rules (R
n) are activated:
The following is the calculation of the value of each fuzzy rule output with the intersection of the fuzzy sets DCPA ∩ AP ∩ RB ∩ V:
The union of all outputs is
All outputs belong to the fuzzy set »Mid to Stbd«.
The following is the last task in the process, known as defuzzification. It is a process of calculation of the crisp output, i.e. course alteration. The defuzzification method used is a centroid method.
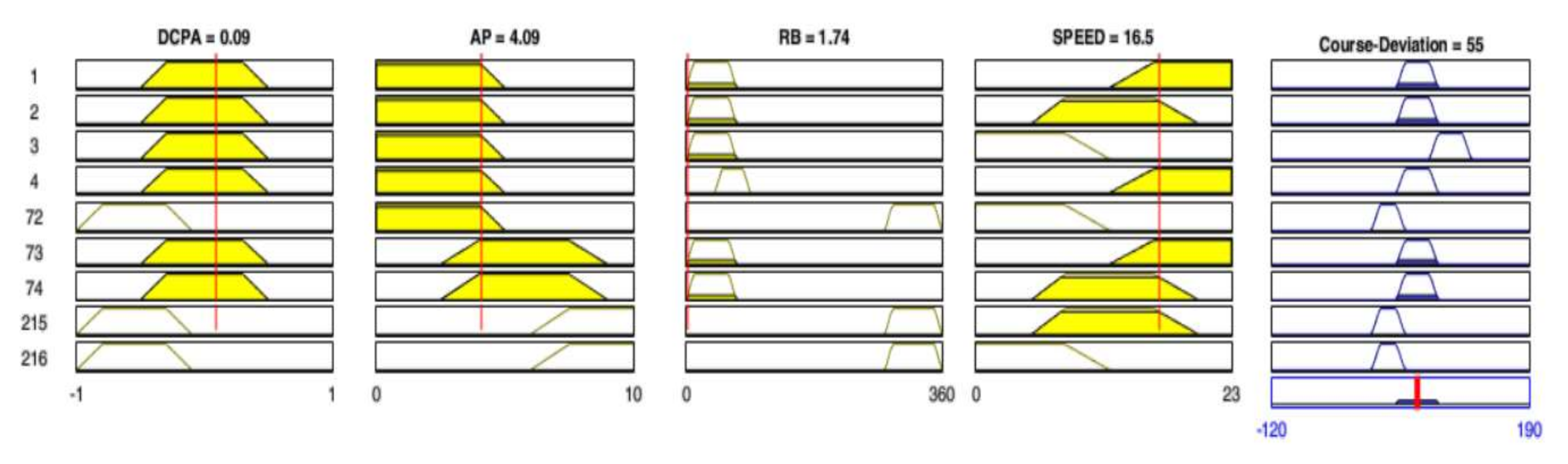
Figure 8 shows excerpt of mapping input data into output decision using MATLAB Fuzzy Logic Toolbox.
Explanation: The decision model calculates course alteration x* = 55°, and the new course for collision avoidance is 35°.
Figure 9 shows a relative movement of the target vessel after course alteration.
Analysis: Case study 1 shows an encounter with a target vessel approaching from opposite directions. The decision model assesses the risk of collision by calculating a DCPA value which is less than the safe ship domain of 1 M according to initial data. With a time delay of the navigational situation for 11 min, the model calculates the input parameters of the fuzzy inference system RB and AP. Based on the input parameters, the fuzzy inference system calculates the course alteration and reassess the risk of a collision. The model graphically plots the planned trajectory of the target vessel. The new DCPA of the encounter after course alteration confirms the quality of the calculated avoidance manoeuvre as it is greater than 1 M (
Table 7).
4.2. Case Studies
The functionality of the decision model was tested on different cases; the results of the simulations are shown in the following tables (
Table 8,
Table 9,
Table 10,
Table 11,
Table 12 and
Table 13). In all cases, the own vessel is in a give-way position: case 2 simulates a crossing situation with a target vessel approaching from starboard bow, case 3 simulates the situation where a target vessel acts as give-way vessel but violates rule 16 “Action by give-way vessel”, and the own vessel as a stand-on vessel must perform an action to avoid the collision. Case study 4 simulates the approach situation with the target vessel from RB 274°. The target, in this case, is a stand-on vessel (constrained by the draft), the own vessel is a give-way vessel. The simulation shows the avoidance at about 4 M, the fuzzy logic with the input parameters calculates a larger course alteration, thus ensuring a meeting at 3.8 M. Case study 5 tests the response of the fuzzy inference system for the approach situation according to COLREG rule 13. Case 6 simulates the approach situation with an RB value between 90 and 112.5°. The simulation observes the compliance of the model, which considers COLREG rules 8 and 19, which require that the vessel which detects the presence of another vessel by radar alone must avoid alteration of course towards the target vessel abeam or abaft the beam [
29]. The graphical representation of the relative movement of the target vessel for each case study is shown in
Figure 10.
5. Discussion
The simulations show the collision avoidance of a target vessel in three different navigation situations: head-on, crossing, and overtaking, whereby the own vessel has a give-way obligation. The simulations do not consider the manoeuvring characteristics of the vessels and are performed in a weather-free environment, eliding, for instance, wind and ocean currents. The results of the simulations show the decision at a subjectively determined time delay, but in real-time situations, the officer of the watch (OOW) usually has a certain timeframe to perform a collision avoidance manoeuvre that meets the desired safety criteria. For this reason, the quality of the model was also evaluated for different time delays to determine whether the decision meets the initial requirement of a DCPA value. We compared the timeframe of correct decisions with TCPA and obtained the percentage of time the model was still calculating course changes correctly and in accordance with the boundary conditions.
Case study 1: Course alteration is satisfactorily calculated in a timeframe of 15 min (see
Table 14). After a 15 min time delay, the target vessel is at the distance less than 2 M, which is also the distance at which the decision model no longer operates according to the initial conditions.
The graph (
Figure 11) represents the DCPA value at different time delays. The figure shows that the model calculates the proper decisions in the timeframe of 15 min, which is 77% of the total time available from the beginning of the observed situation when TCPA was calculated, which in simulation case study 1, was 19 min.
Case study 2:
Table 15 shows the course alteration decision at different time delays. The safety condition DCPA (
Figure 12) proves that the FIS calculates correct decisions in a timeframe between 2 and 16 min. With the time delay of 18 min, the course deviation is less than 30°, which according to Cockcroft [
9], is not considered an appropriate course deviation. In 22 min, the AP of a target vessel is 1 M, and avoidance at this distance poses a high risk of vessel collision because the DCPA is less than 1 M. The model calculates the correct decisions in 67% of the total time available from the beginning of the observed situation.
Case study 3: In this case, the target vessel is a give-way vessel which violates the COLREG rules. The result of the avoidance manoeuvre shows that the fuzzy inference system responds well even in emergencies (
Table 16).
Figure 13 represents the DCPA value at different time delays. The model responds well up to 7 min of the time delay, any alteration of course afterwards would jeopardize the safety of vessels.
Avoiding a dangerous vessel that violates the COLREG rules is performed in accordance with rules 8 and 19, thus changing the course to the side where there is no target vessel, in this case, the starboard side. The minimum DCPA condition is not met from 8 min on when the target vessel is at 2.1 M. The calculated change of course does not meet the criteria of minimum DCPA, so this condition is only partially confirmed. The model calculates the proper decisions in only 35% of the total time available from the beginning of the observed situation.
Case study 4: Example of a vessel encounter from the port side. As the target vessel is a vessel constrained by draft, the own vessel is obliged to avoid it. According to COLREG rule 8, the model proposed alteration of course to starboard side. The manoeuvre change is large enough to be detected on the radar.
Table 17 shows the course alteration at different time delays, and
Figure 14 shows the DCPA value at different time delays. The results show that the model responds well from the 2 to the 24 min. In the 24th min of observation, the distance of the observed vessel is 1.05 M. The model calculates the proper decisions in 89% of the total time available from the beginning of the observed situation.
Case study 5: In this case, the own vessel is in the position to overtake the target vessel. According to COLREG rule 13, overtaking is possible in both directions. The model offers the avoidance decision to starboard.
Table 18 shows the calculated course alteration for different time delays.
The observed DCPA condition demonstrates that fuzzy reasoning responds appropriately in the timeframe between 2 and 28 min. At 28 min (
Figure 15), the vessel is at a distance of 1.1 M, and the model calculates the change of course as 95.3°, but due to the distance being too short, the manoeuvre does not reach a safe distance of approach as the calculated DCPA is 0.9372 M. The appropriate avoidance interval is between 2 and 27 min of time lag. The model calculates the proper decisions in 80% of the total time available from the beginning of the observed situation.
Case study 6: The case deals with a meeting situation from abeam. In this case, the alteration in course towards the target vessel is dangerous.
Table 19 shows the calculated course change to port side at different time delays. The decision is satisfactorily calculated within the timeframe of 2 to 17 min, as shown in
Figure 16. The condition of the vessel’s safety domain is met at all distances except for less than 1.7 M in the 18th min. The model calculates the proper decisions in 66% of the total time available from the beginning of the observed situation.
When planning a collision avoidance manoeuvre, course alteration is the most common and effective measure to avoid a close quarters situation, especially on the high seas. According to COLREG rules, the manoeuvre must be made in good time and should be clearly visible to other vessels in the vicinity. However, the distance at which vessels should begin the avoidance manoeuvre, particularly in adverse weather conditions or in restricted areas, is not quantified, leaving the decision to each individual OOW (officer of the watch).
An important factor to consider is vessel’s manoeuvrability, where the vessel type, size, and loading condition will affect its turning ability. In addition, external influences, such as the wind and local currents with their direction and force, affect the movement of the vessel and, hence, the course alteration, as they can make it difficult for the vessel to achieve the desired change of direction in the planned time. In particular, a large trim by the stern can change the vessel’s wind handling characteristics quite significantly. Local currents also cause the vessel to drift or affect its speed, and their influence depends on the vessel’s underwater surface exposed to the currents and their direction. In shallow waters, the turning circles become larger, but the ability to maintain course is better unless the low speed further affects the vessel’s responsiveness to course alterations. Therefore, when planning a course alteration, the OOW must consider all effects on the vessel’s manoeuvrability in order to make an effective and safe manoeuvre in good time and at a safe distance from the target vessel.
6. Conclusions
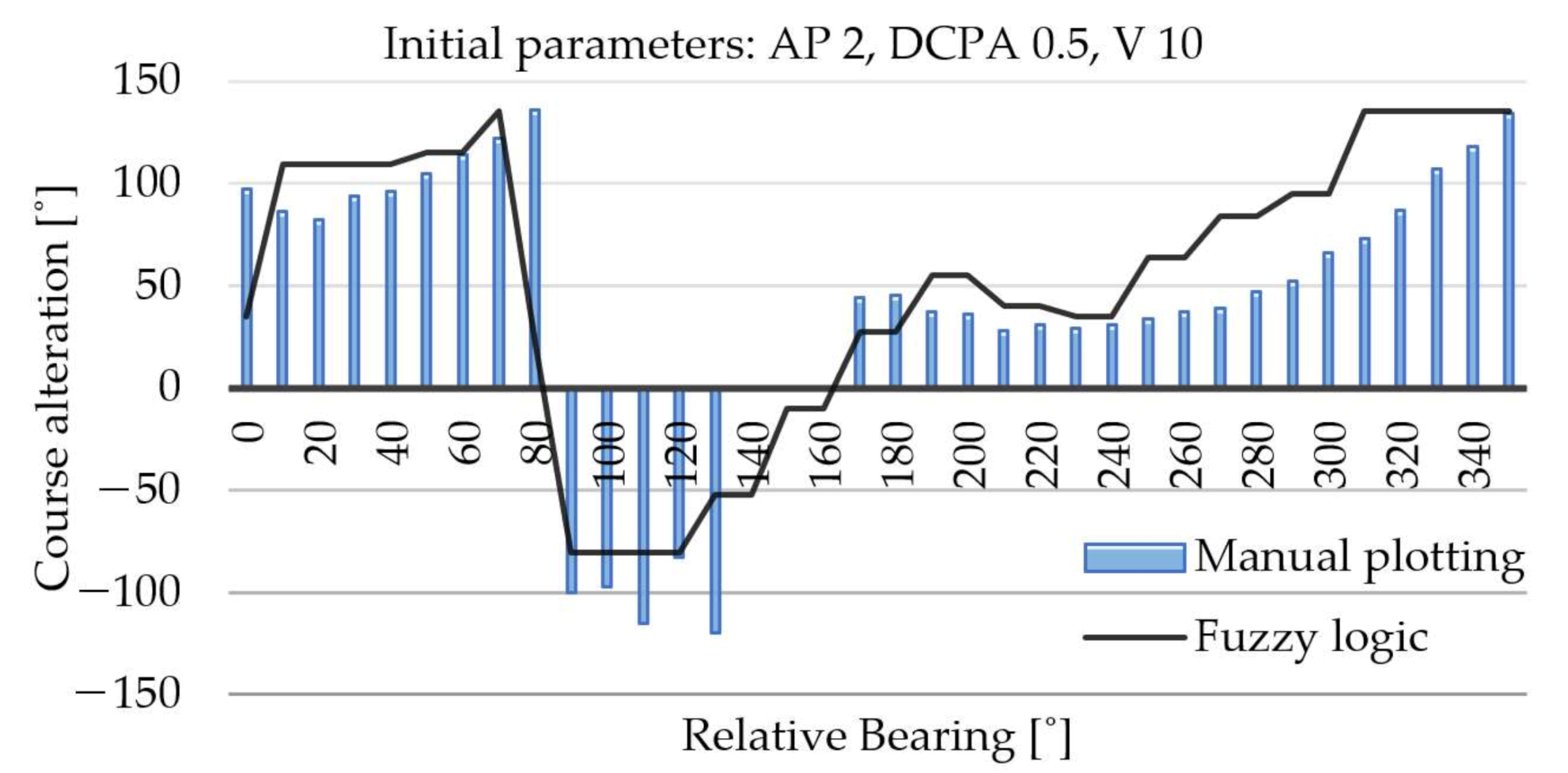
The article presents computer predictions of collision avoidance at sea by combining the traditional method of manual radar plotting with an artificial intelligence method—fuzzy logic. The advantage of fuzzy logic is in generating decisions based on inaccurate data that cannot be described by mathematical notation as they are expressed linguistically. Fuzzy logic thus imitates the human way of thinking, capable of solving complex tasks, although they may also contain a great deal of uncertainty. The peculiarity of the decision model is its tuning with the results of the database of correct solutions obtained by the traditional method of manual radar plotting. Based on them, the fuzzy sets and fuzzy rules were formed.
However, there were some shortcomings in model validation: in areas where decisions change from positive to negative and vice versa, greater errors can occur, and additional fuzzy sets must be created to reduce these errors. In addition, the validation process of the fuzzy inference system (fuzzy sets and fuzzy rules) takes a long time before it is able to make useful decisions.
The multi-parametric collision avoidance decision model uses parameters obtained based on approaching vessels without considering the vessel’s manoeuvrability and meteorological and oceanographic parameters that may additionally influence the choice of avoidance manoeuvre or the degree of deviation (change of course and/or speed of own vessel). The simulations also use the marine environment without vertical and/or horizontal constraints (coast, depth); the latter can further influence the choice of avoidance manoeuvre, especially the direction of avoidance. Further research will focus on avoidance using vessel speed and a combination of speed change and the course of own vessel as well as collision avoidance in a multi-vessel situation.
An important segment of further research and testing represents the integration decision model for all vessels that are included in the navigation situation and, thereby, to reduce the likelihood of violating the rules of avoidance between participating vessels.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}