1. Introduction
For the initial stages of ship design, accurate and reliable predictions of ship hydrodynamic analysis and motions in waves are essential. Various numerical methods are required to be developed for ship seakeeping analysis. For the wave-ship interaction problem with large size, the potential flow theory is much more efficient than RANS (Reynolds-averaged Navier-Stokes) simulation [
1], which is widely applied to a practical engineering problem.
In the early researches, ship hydrodynamic analysis is developed based on two-dimensional strip theories. Ogilvie and Tuck [
2], Tasai [
3], and Salvesen et al. [
4] proposed a new strip theory, rational strip theory, and STF, method respectively. The STF strip method is most widely used in ship motion calculation and structure design. Fonseca and Guedes Soares [
5,
6] formulated the ship hydrodynamic analysis in the time domain. Tavakoli et al. [
7] investigated unsteady planning motion in waves using towing tank tests, Computational Fluid Dynamics (CFD), and the 2D+t model. These two-dimensional methods have been applied in the ship hydrodynamic and motion analysis for a long time. However, for the strip theories, the flow is assumed to be constrained in two-dimensional sections. Accurate hydrodynamic analysis can only be carried out for slender ships, and high frequency and low-speed assumptions are also required.
The shortcomings of strip theory can be overcome by 3D panel methods. Nakos [
8] used the Rankine panel method to study the ship seakeeping problem in the frequency domain. Kring [
9] and Chen [
10] applied the Rankine panel method to ship hydrodynamic analysis in the time domain. The Rankine panel methods employ the Green function
as a fundamental solution of the Laplace equation; the evaluation of
integration over the boundaries is easy to be carried out. However, the Rankine Green function
does not satisfy any boundary conditions, and many more panels are required for mesh discretization of the free surface, which would greatly reduce computational efficiency.
The problems caused by the Rankine panel method can be avoided by using the 3D free surface Green function method, which employs the 3D free surface Green function as the fundamental solution of the Laplace equation. The 3D free surface Green function method only requires the discretization of the ship wetted hull surface, but the evaluation of the 3D free surface Green function is quite complex. Wehausen and Laitone [
11] deduced expressions for 3D free surface Green function in arbitrary water depth, which laid the foundation of solving the hydrodynamic problem by 3D free surface Green function method. Blandeau and Francois [
12] solved the radiation and diffraction problem for FPSOs by using the HydroSTAR software, in which the original codes were developed by the frequency domain Green function method. Furthermore, Wu and Eatock Taylor [
13] solved the hydrodynamic problem for practical ships by using the frequency domain Green function with speed. When the frequency domain Green function method is used to solve the ship hydrodynamic problems with speed, the numerical calculation of the frequency domain Green function is much more complex and time-consuming. Although the numerical results are close to the experimental values, there are still some problems in the treatment of waterline integral terms, which hinders its wide application. It’s easy to formulate and solve ship hydrodynamic problems and motion problems in the three-dimensional time domain. Liapis [
14] applied the transient free surface Green function (TFSGF) to solve the linear radiation problem for a ship with constant forward speed. King [
15] further extended to the linear diffraction problem for ships, and the Froude–Krylov (F–K) forces were evaluated by Gaussian quadrature. However, the F–K forces near the mean free surface may not be accurately evaluated due to wave volatility. Rodrigues and Guedes Soares [
16] evaluated the Froude–Krylov forces by analytical exact pressure integration expressions, allowing for considerably coarse meshes with no loss of accuracy. However, radiation and diffraction forces are kept linear by the indirect time-domain method, which is difficult to calculate the hydrodynamic coefficients in the high-frequency range. Zhang et al. [
17] studied the influences of the water line integral terms on the wave diffraction force of a moving floating body and pointed out that the influences of the water line integral terms on the first-order force could be ignored. Sun [
18] developed a 3D time-domain program based on the TFSGF method, which can be used to solve the ship hydrodynamic problems in waves. Singh and Sen [
19] studied seakeeping problems under different nonlinear levels, and computations were carried out for a Wigley hull and an S175 hull in waves. Datta et al. [
20] carried out modifications for three fishing vessels and presented a variety of calculated motion results for different wave angles. Lin [
21,
22] proposed a three-dimensional time-domain approach to study the ship’s large-amplitude motions in a seaway and developed the software LAMP (Large Amplitude Motion Program) for ship hydrodynamic analysis and wave loads calculation.
The accurate and efficient evaluation of TFSGF is essential for the ship hydrodynamic analysis in the time domain. According to the oscillating properties of the wave part of TFSGF, King [
15] and Shan [
23] divided the time computation domain into different regions to evaluate the TFSGF and its derivatives, and series expansions and asymptotic expansions were applied to the small time computation domain and large time computation domain, respectively. Clement [
24] firstly found that the TFSGF and its derivatives are the solutions of the ordinary differential equations (ODEs). Shen et al. [
25] solved the ODEs by using the fourth-order Runge–Kutta method (RK44), in which the numerical instability would occur after a long time simulation even with a very small time step size. Based on the precise integration method (PIM) proposed by Zhong [
26], Li et al. [
27] solved the ODEs, which could greatly improve the numerical stability even with a quite large time step size. However, it can be very time-consuming due to the quite high order of the coefficient matrix.
Within the linear potential theory, the main objective of this paper is to develop a three-dimensional time-domain panel method to study the ship’s hydrodynamic analysis and motions. Analytical integration expressions for F–K force formulations over the quadrilateral panels can be derived by using Green’s theorem, which can avoid computational errors by numerical integration methods. To improve the accuracy and numerical stability of TFSGF evaluation, a numerical method is developed to solve the TFSGF by using a precise integration method with varying parameter settings. Based on the impulse response function method, the ship radiation problem and diffraction problem are solved by using TFSGF. The Wigley I hull is taken as a study case; convergence studies for ship hydrodynamic analysis and motions are conducted with respect to time step size and hull discretization. The computed hydrodynamic coefficients, wave exciting forces, and motions for the ship are compared to other solutions, such as Magee’s method [
28], previous literature experimental data [
29], and so on. Thus, the three-dimensional time-domain panel method proposed in this paper is validated.
4. Results and Discussions
4.1. The Numerical Results of TFSGF
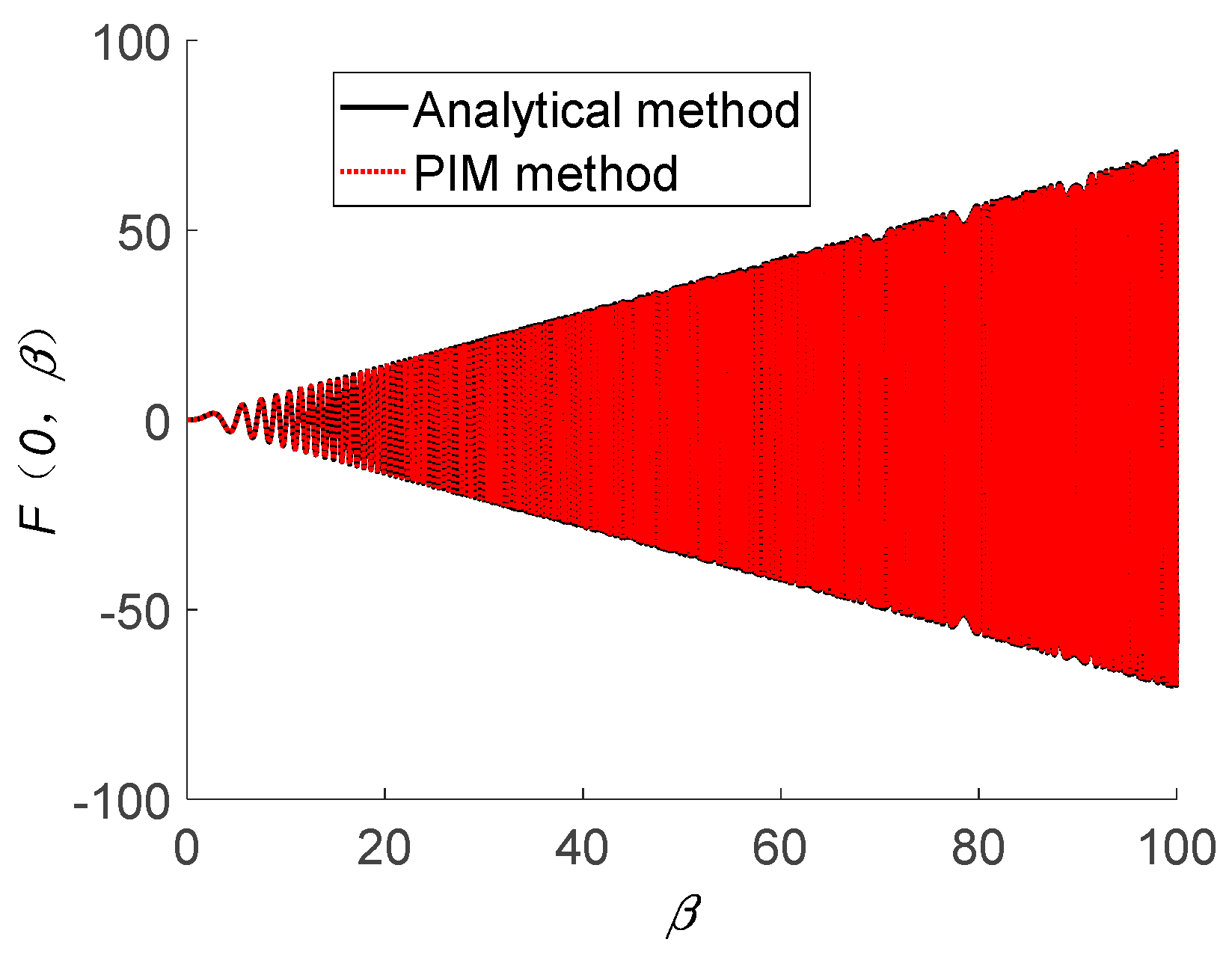
In
Figure 3, the “analytical method” denotes the solutions obtained by the analytical expression for TFSGF when
(presented in Equation (40)).
Figure 3 shows the solutions obtained by the “PIM method”, with constant
m = 50 for
[
27].
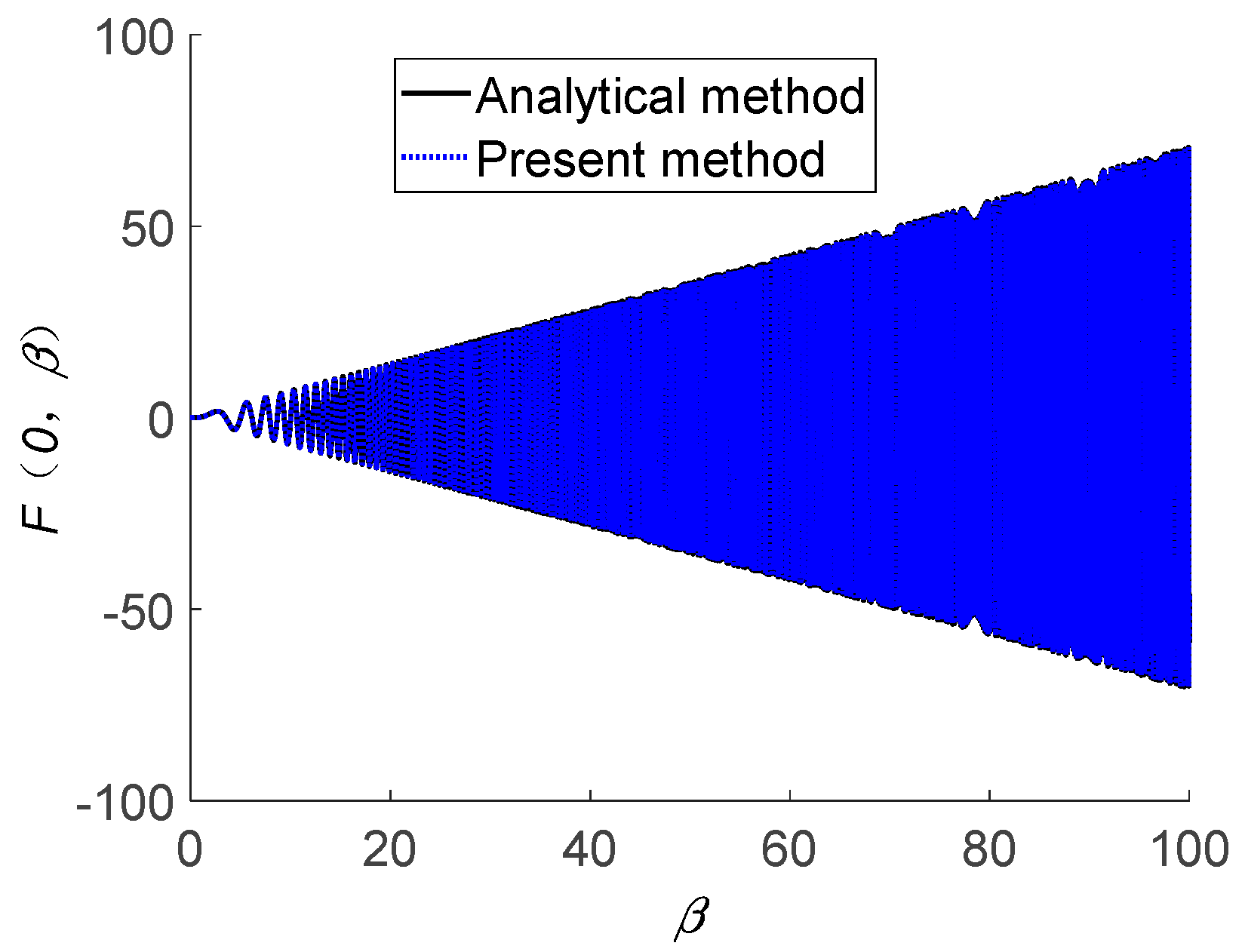
In
Figure 4, “present method” denotes solutions of TFSGF solved by PIM method, with variable
m for
; in the present study,
m = 30 for
,
m = 40 for
, and
m = 50 for
, respectively.
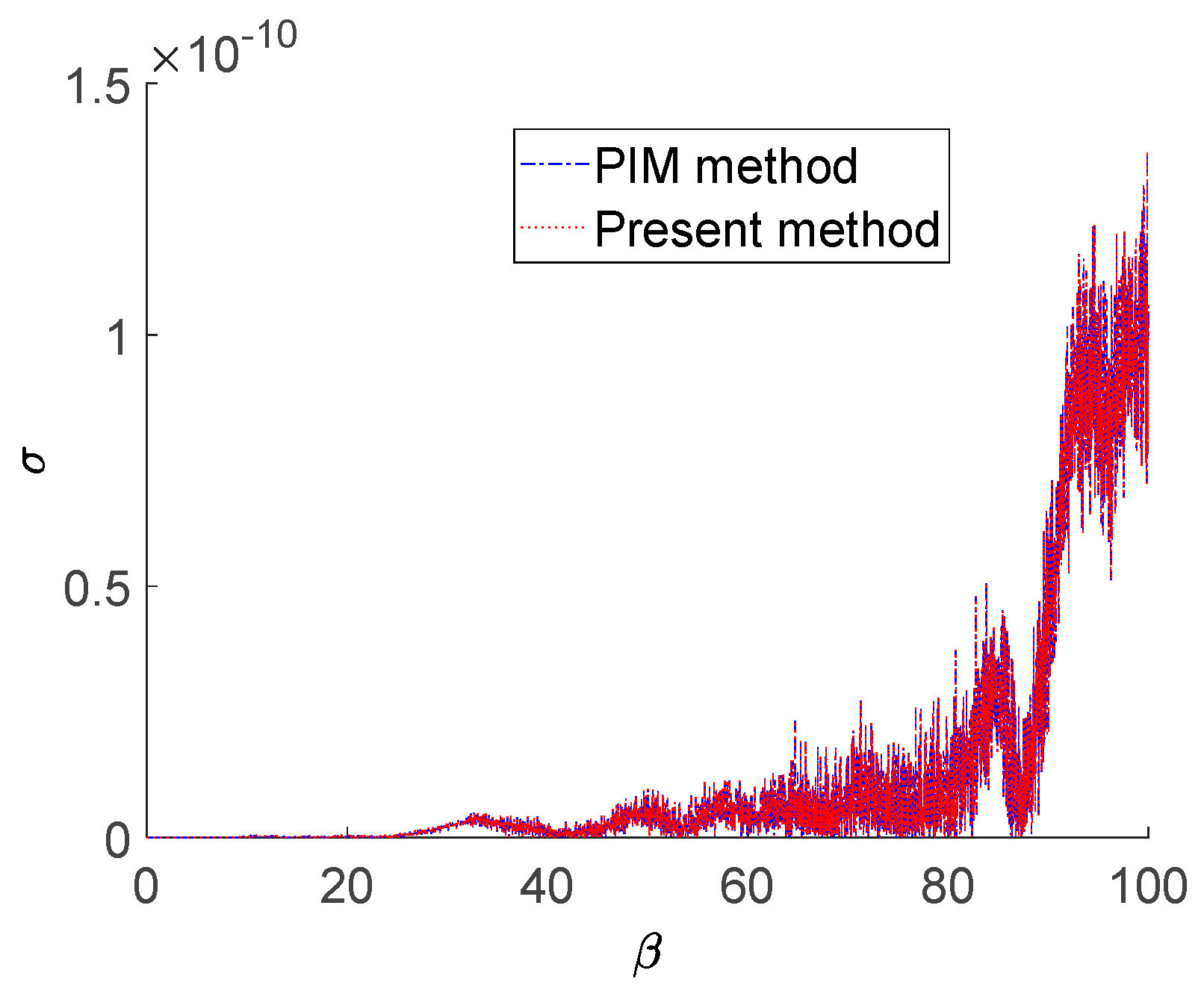
Figure 5 shows absolute errors computed by “PIM method” and “present method”, with variable
m for
; in the present study,
m = 30 for
,
m = 40 for
, and
m = 50 for
, respectively.
In the present study, all computations are carried out on the platform Intel(R) Core (TM) i7700HQ CPU 2.80 GHz. From
Figure 3,
Figure 4 and
Figure 5, the “PIM method” takes about 236.38 s to generate TFSGF at
sets of
for
at
, while the “present method” only takes about 85.8 s. The absolute errors of both “present method” and “PIM method” are within
. Thus, the “present method” shows better evaluation efficiency than the “PIM method”.
4.2. The Study Case and Parameter Setting
The hull form of Wigley I hull can be defined as in the reference [
29]
where
is the length of the ship;
is the width of the ship;
is the draft of the ship.
The main particulars of the Wigley I hull are given in
Table 2;
denotes the pitch inertia radius of the ship, and
denotes the displacement volume of the ship.
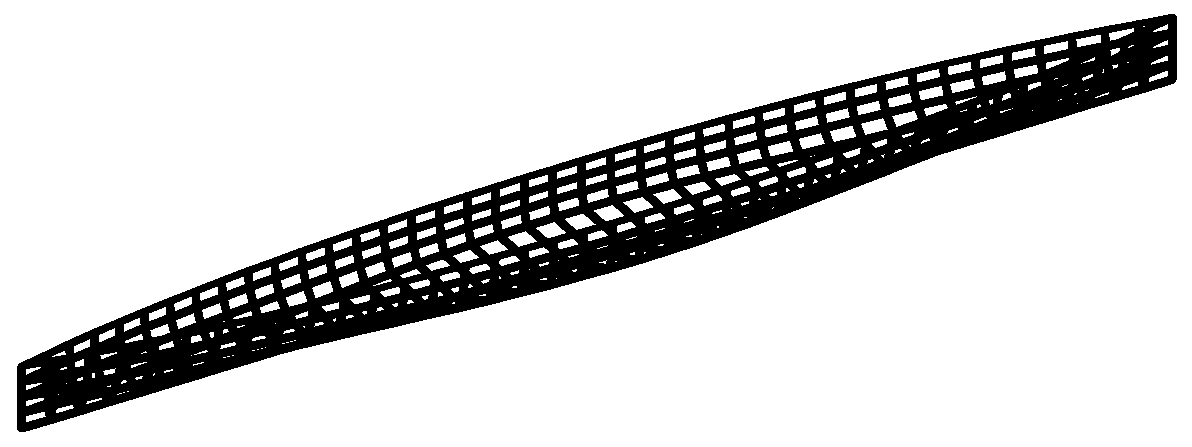
The meshes of the ship’s hull are illustrated in
Figure 6.
Non-dimensional forms of hydrodynamic coefficient, memory function, wave exciting forces, and motion response are given below.
The non-dimensional added mass coefficients are defined as and , respectively.
The non-dimensional damping coefficients are defined as and , respectively.
The heave memory function and pitch memory function are defined as and , respectively.
The non-dimensional wave exciting forces are defined as and , respectively.
The non-dimensional heave and pitch motion are defined as and , respectively.
The non-dimensional frequency is defined as , the non-dimensional wave number is defined as , and the non-dimensional frequency is defined as ( is encounter period).
4.3. The Convergence Study on Panel Number N and Time Step
The panel number N and the time step have influences on the numerical results of ship hydrodynamic analysis and ship motion. The convergence of the two parameters is verified by taking the Wigley I hull as a study case. The error of 0.1% is adopted to test convergence. Wigley I hull is studied at Fn = 0.2 (Fn denotes Froude number, ) in head seas (, m).
The
Gaussian quadrature [
15] can be used to compute the F–K forces and hydrodynamic forces acting on the panel. As shown in
Figure 7, the square panel can be progressively subdivided until the prescribed precision is reached.
The four different panel numbers of the Wigley I hull surface discretization with constant time step
are carried out (
Table 3).
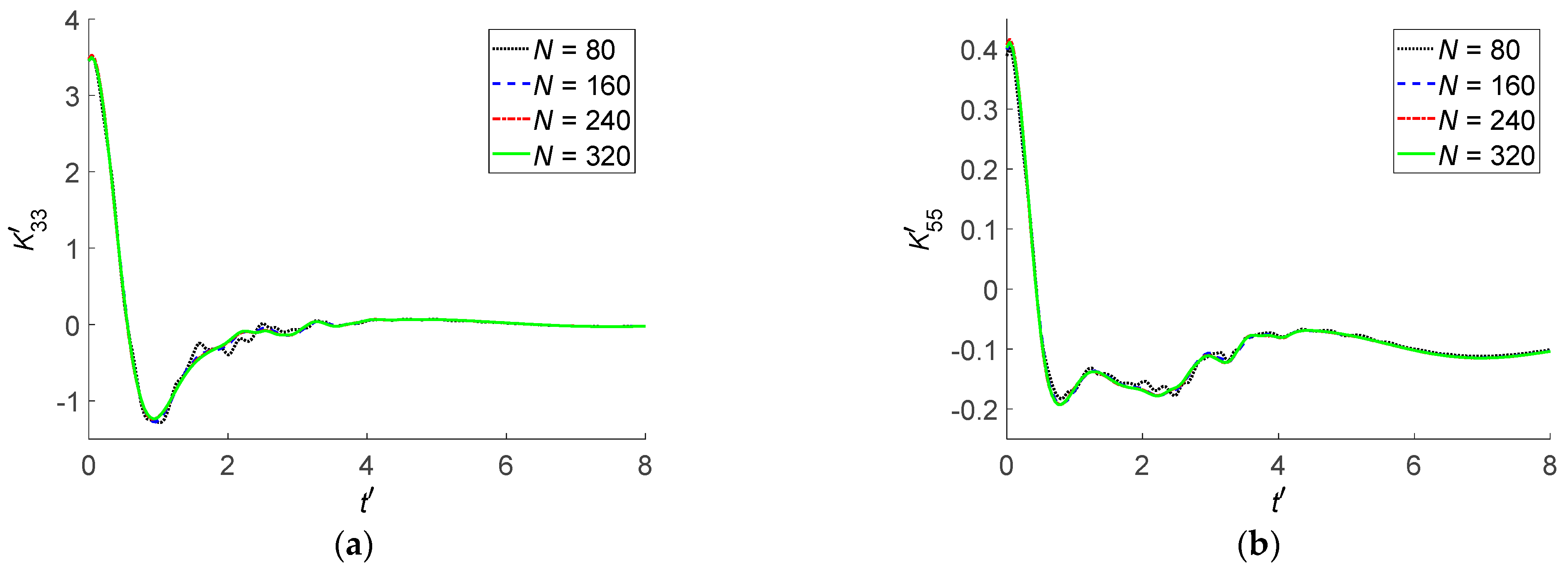
Figure 8 illustrates the time history of the heave memory function and pitch memory function.
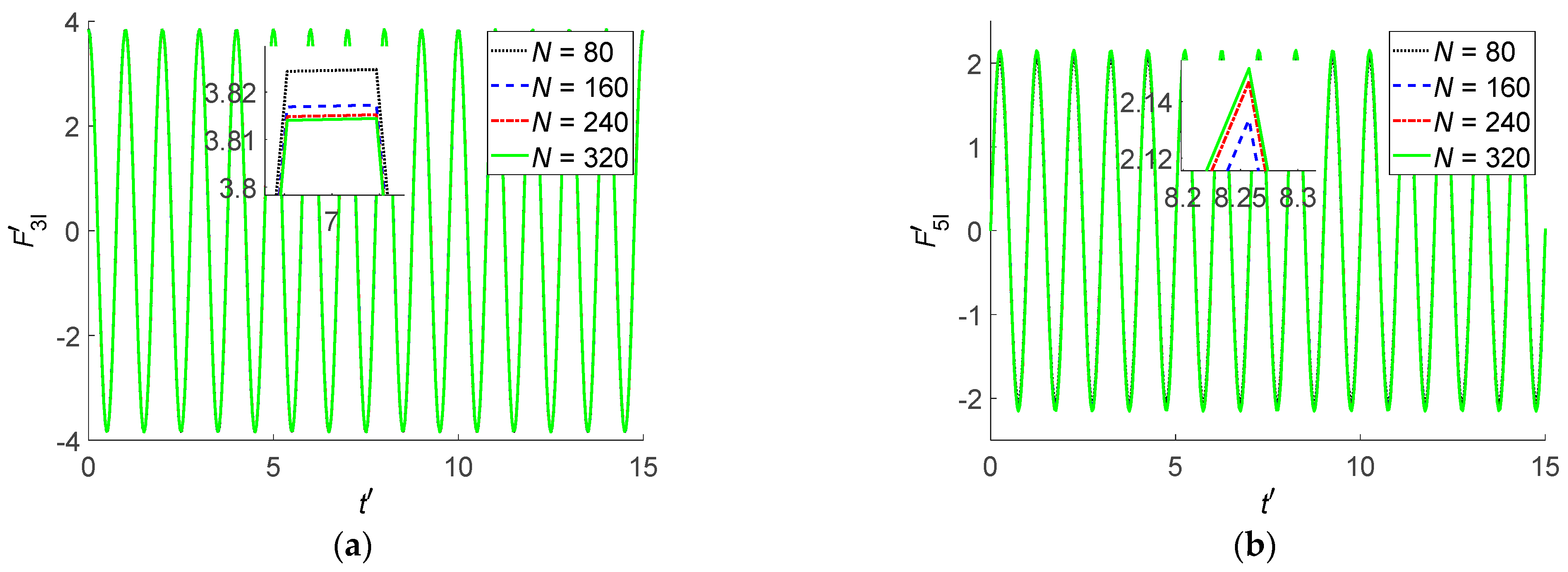
Figure 9 shows the time history of the non-dimensional F–K forces. The Wigley I hull advances in head regular waves at
Fn = 0.2, and the wavelength to ship length is
. F–K forces can be obtained by the Gaussian quadrature method.
As shown in
Figure 8 and
Figure 9, the numerical results tend to be convergent when
, and the relative error between
and
is within 0.1%. Thus, panel number
N = 320 is selected for ship hydrodynamic analysis and ship motion in the present study.
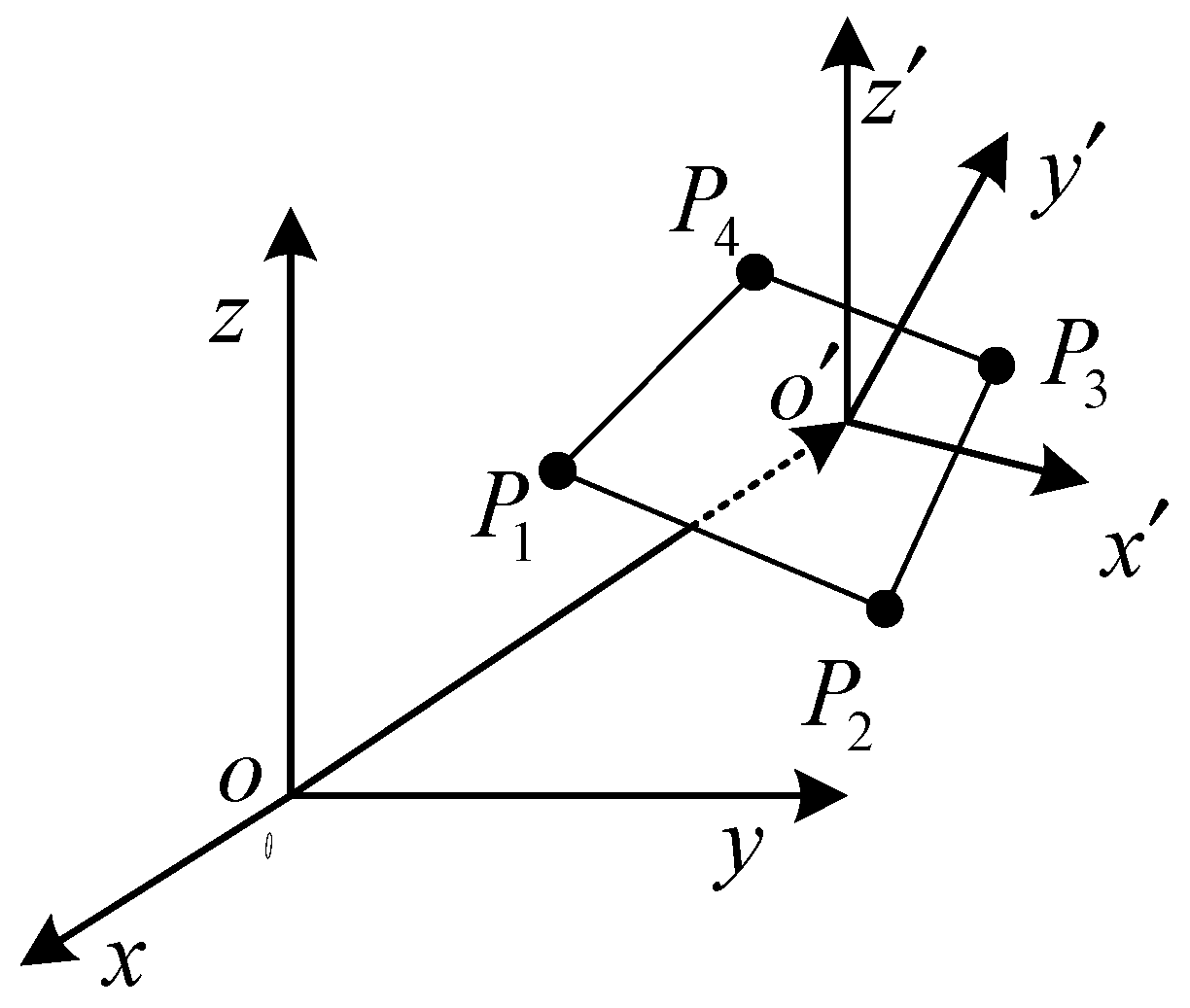
In the system , a square panel is adopted as a study case advancing in head regular waves, whose four vertices are , , , and , respectively. The square panel advances in head regular waves at Fn = 0.2, and the wavelength to ship length is 1.5, and the wave steepness is 0.024.
At t = 0, the F–K force acting on the square panel by the analytical integration method is 179.6193 N (the calculation accuracy can be set to 0.0001 N).
From
Table 4, as the subdivision time is 4, the square panel can be subdivided into 256 smaller subpanels, as shown in
Figure 7. However, the computational results of the Gauss integration method and the analytical integration method are the same. For simple geometry of the ship’s hull, the magnitude of panel number for hull mesh generation can be as low as
O(10), such as barge vessel [
16]. The analytical integration method can improve the F–K forces evaluation accuracy with no loss of accuracy.
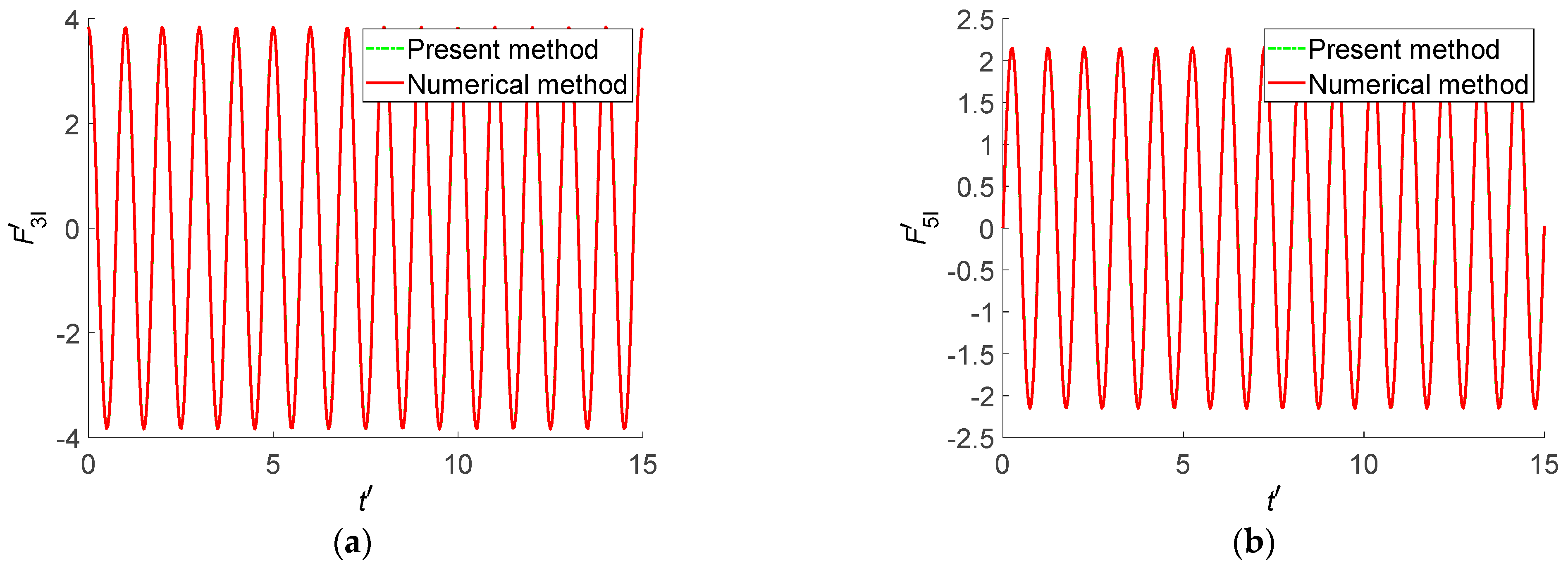
Figure 10 shows the time history of the non-dimensional F–K forces in head regular waves at
Fn = 0.2 obtained by “numerical method” and “present method”, respectively. The Wigley I hull surface is discretized and processed into
N = 320 quadrilateral panels. “numerical method” denotes the numerical results of F–K forces obtained by
Gaussian quadrature, and “present method” denotes the results of F–K forces obtained by the analytical method.
From
Figure 10, the F–K forces obtained by “numerical method” and “present method” are almost the same, and the relative error between the “numerical method” and “present method” is 0.1%. The CPU time consumption for the “numerical method” is about 35.4 s, while the CPU time consumption for the “present method” is about 27.8 s. The “present method” is more efficient than the “numerical method”. The efficiency and accuracy of the “present method” can be validated.
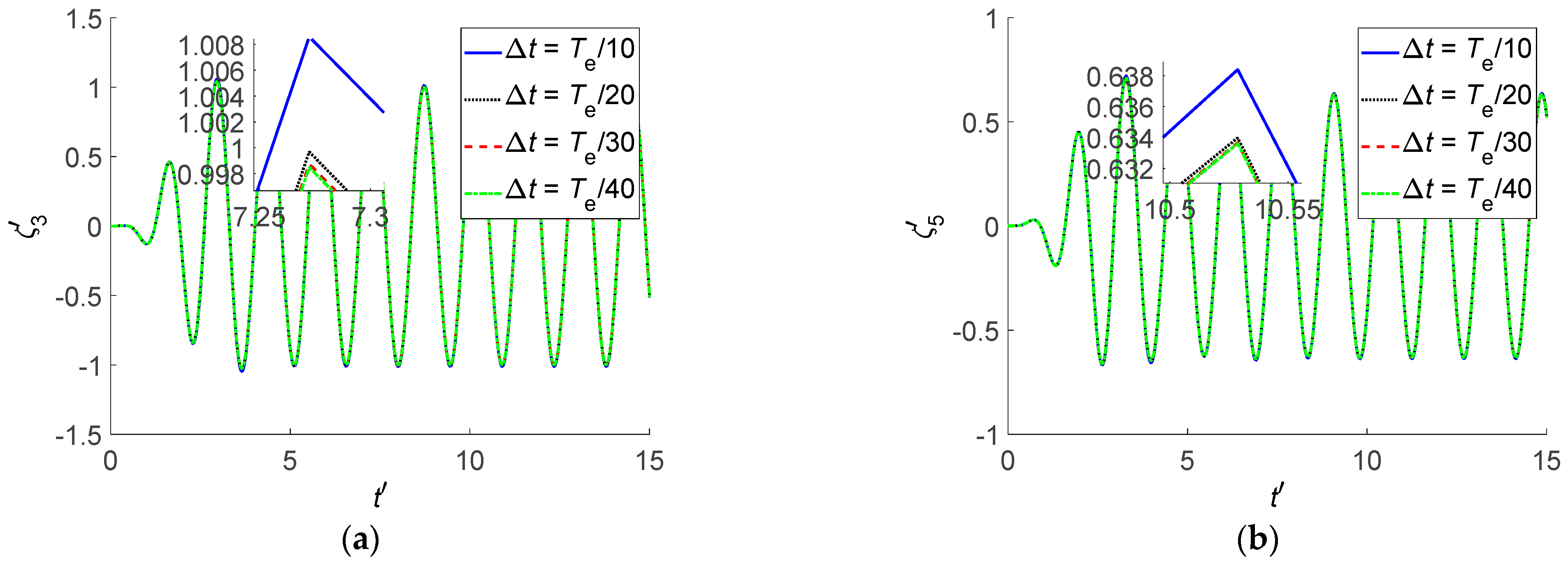
Figure 11 illustrates the time history of heave motion and pitch motion of Wigley I hull with four different time steps, which are
,
,
, and
, respectively.
In
Figure 11, as time step
decreases, a convergent trend can be obtained, and the relative error between
and
is within 0.1%. The time step
is selected for the subsequent ship hydrodynamic analysis and ship motions.
4.4. Added Mass and Damping Coefficient
Since the hydrodynamic coefficients on the main diagonal have a significant influence on ship hydrodynamic analysis and motion, the non-dimensional coefficients , , , and are selected for detailed numerical analysis.
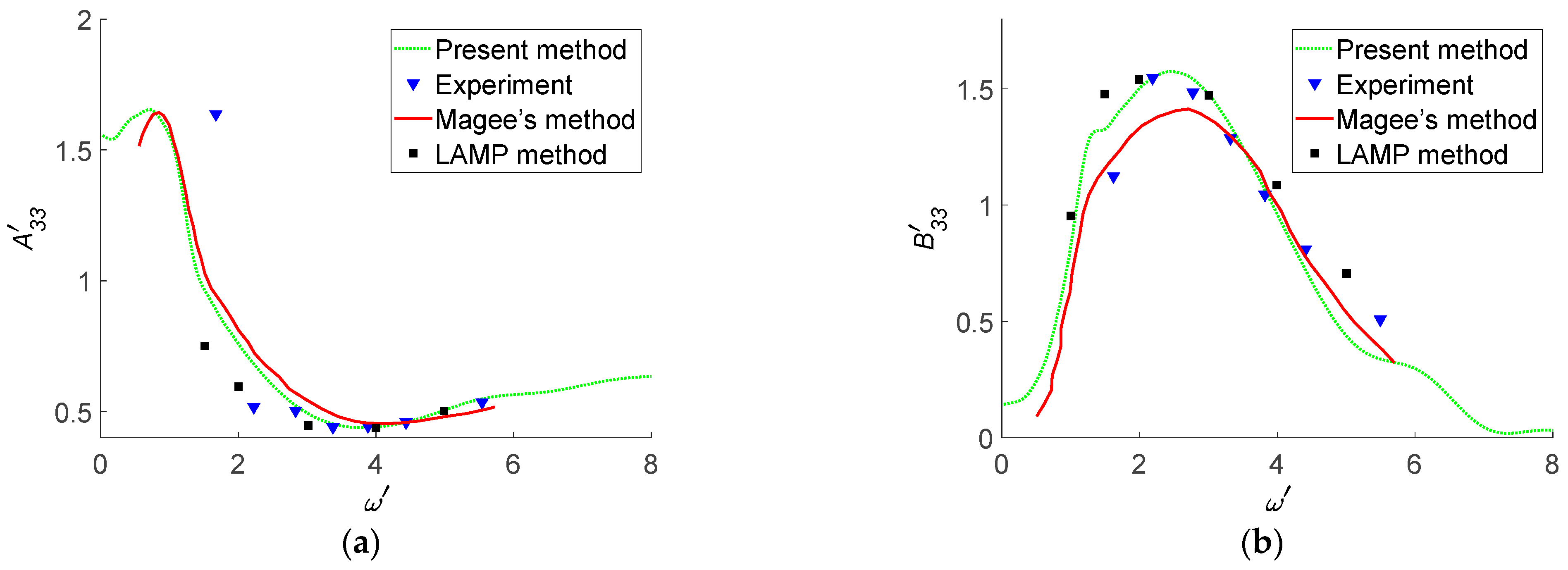
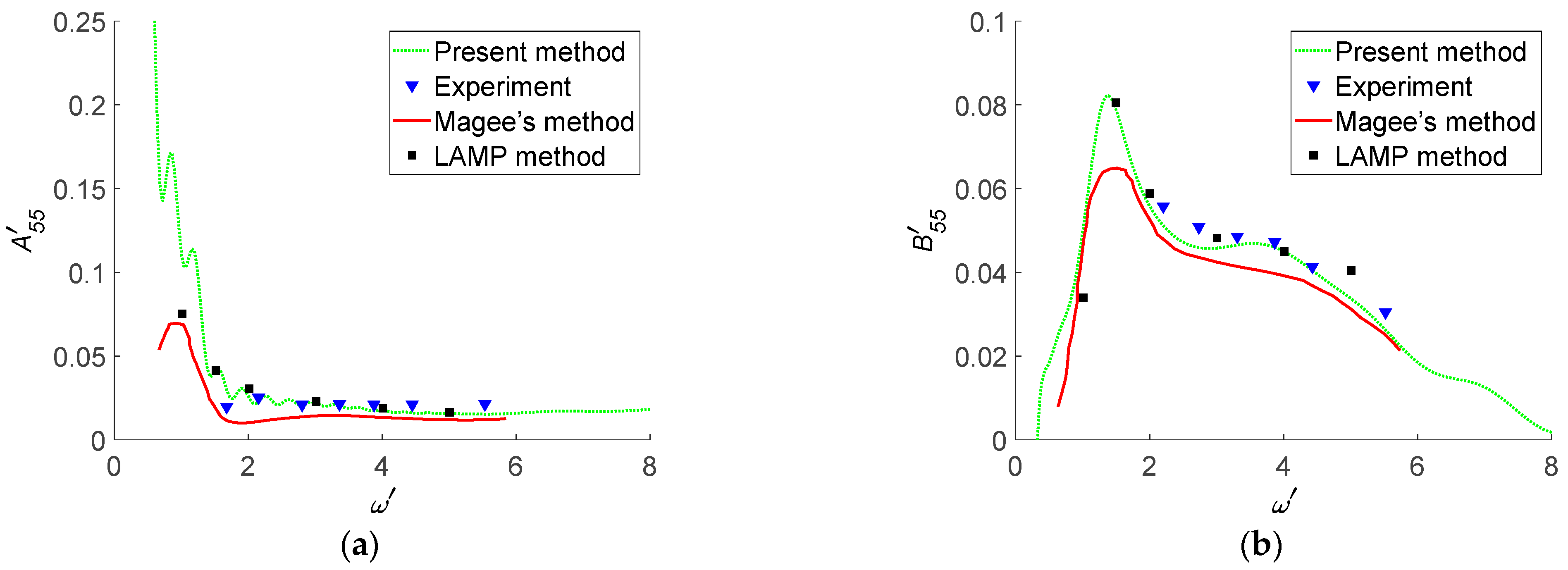
For the Wigley I hull at
Fn = 0.2,
Figure 12 presents the comparisons of the non-dimensional heave-heave added masses and damping coefficients, and
Figure 13 presents the comparisons of the non-dimensional pitch-pitch added masses and damping coefficients. In the legend of
Figure 12 and
Figure 13, “present method” denotes numerical results obtained by the TFSGF method without waterline terms in Equation (5). “experiment” denotes previous literature experimental data [
29] obtained by Journée, and the experiments were carried out in the Shiphydromechanics Laboratory of the Delft University of Technology. The experimental data on hydrodynamic coefficients, wave loads, and added resistance for heave and pitch motions in head waves of Wigley I hull are sufficient. “Magee’s method” denotes numerical results obtained by the TFSGF method [
28] in which the waterline integral terms of boundary integral equations are included. “LAMP method” denotes numerical results obtained by LAMP software [
21], in which the body nonlinear method was adopted where the perturbation potential was computed on the instantaneous wetted hull under the mean free surface.
Table 5,
Table 6,
Table 7 and
Table 8 present absolute relative errors of hydrodynamic coefficients for Wigley I hull by “present method” and “Magee’s method”, which are compared with previous literature experimental data [
29]. The absolute relative error can be written as
(
denotes absolute relative error,
denotes numerical results obtained by various models, and
denotes a value for previous literature experimental data [
29]).
From
Figure 12 and
Figure 13, resonance occurs around the non-dimensional frequency
, and there is a larger deviation between numerical results and previous literature experimental data [
29]. As the non-dimensional frequency increases, hydrodynamic coefficients obtained from “present method”, “Magee’s method”, and “LAMP method” show a similar change trend. From
Table 5,
Table 6,
Table 7 and
Table 8, the numerical results obtained by the “present method” are in better agreement with the previous literature experimental data [
29] than those obtained by “Magee’s method”. Based on the potential flow assumption, the viscosity of a fluid is ignored. When both the field point and source point are on the mean free surface, the amplitude and oscillating frequency of TFSGF increase rapidly with time parameter
, and there will be a larger numerical error if waterline integral terms of boundary integral equations are included. The accuracy for hydrodynamic coefficient evaluation can be improved by the present method with waterline integral terms excluded.
4.5. The Wave Exciting Forces
The Wigley I hull advances in head regular waves at
Fn = 0.2. The wave exciting forces are composed of F–K forces and diffraction forces in the frequency domain, and diffraction forces in the frequency domain can be obtained by Fourier transformation [
15].
Figure 14 shows the numerical results of amplitudes of the non-dimensional wave exciting forces obtained by various methods. ”SAMP method” denotes numerical results obtained by a transient free surface Green function method in the linear time domain [
21].
From
Figure 14, the maximum relative error between “present method” and “experiment” is within 10.0%, and the non-dimensional wave exciting forces obtained from “present method”, “Magee’s method” and ”SAMP method” show a similar change trend. Thus, the reliability of analytical expression for F–K forces evaluation is verified.
4.6. The Motion Responses
Figure 15 shows the time history of motions of Wigley I hull at
Fn = 0.2 in head regular waves (
).
From
Figure 15, the instantaneous influences of the initial disturbance on the time history of motion disappear after about 3~5 wave periods. Thus, the three-dimensional linear time-domain simulation program developed in the present study is numerically stable.
Figure 16 shows heave response amplitude operators (Raos) and pitch response amplitude operators for ship motions in head regular waves at
Fn = 0.2. The response amplitude of heave motion can be defined as
, and
is the amplitude of ship heave motions. The response amplitude of pitch motion can be defined as
, and
is the amplitude of ship pitch motions. In
Figure 16, “Kim’s method” denotes the numerical results obtained by a three-dimensional Rankine panel method in the linear time domain [
35].
From
Figure 16, for ship heave motion responses, both “present method” and “Kim’s method” can be in good agreement with previous literature experimental data [
29]; for ship pitch motion responses, the numerical results obtained by “present method” are closer to previous literature experimental data [
29] than those obtained by “Kim’s method”. When
approaches 1.80, the numerical results of the pitch motion responses show non-ignorable errors compared with the previous literature experimental data [
29]. As
approaches 1.80, the wave encounter frequency is nearly equal to the natural frequency of pitch motion. Thus, the resonance can take place, and the previous literature experimental data [
29] is quite larger than the numerical results. In the present study, the TFSGF method is adopted to solve ship motion problems. The TFSGF can automatically satisfy the free surface boundary condition, and the numerical errors involved in radiation boundary conditions can be reduced. Thus, the numerical results obtained by the “present method” can be in better agreement with previous literature experimental data [
29] than “Kim’s method”.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}