
Underwater Image Enhancement Based on Local Contrast Correction and Multi-Scale Fusion


Abstract
:1. Introduction
2. Local Contrast Correction and Fusion Algorithm
2.1. Underwater Image White Balance Based on Red Channel Compensation
2.2. Improved Local Contrast Correction Method
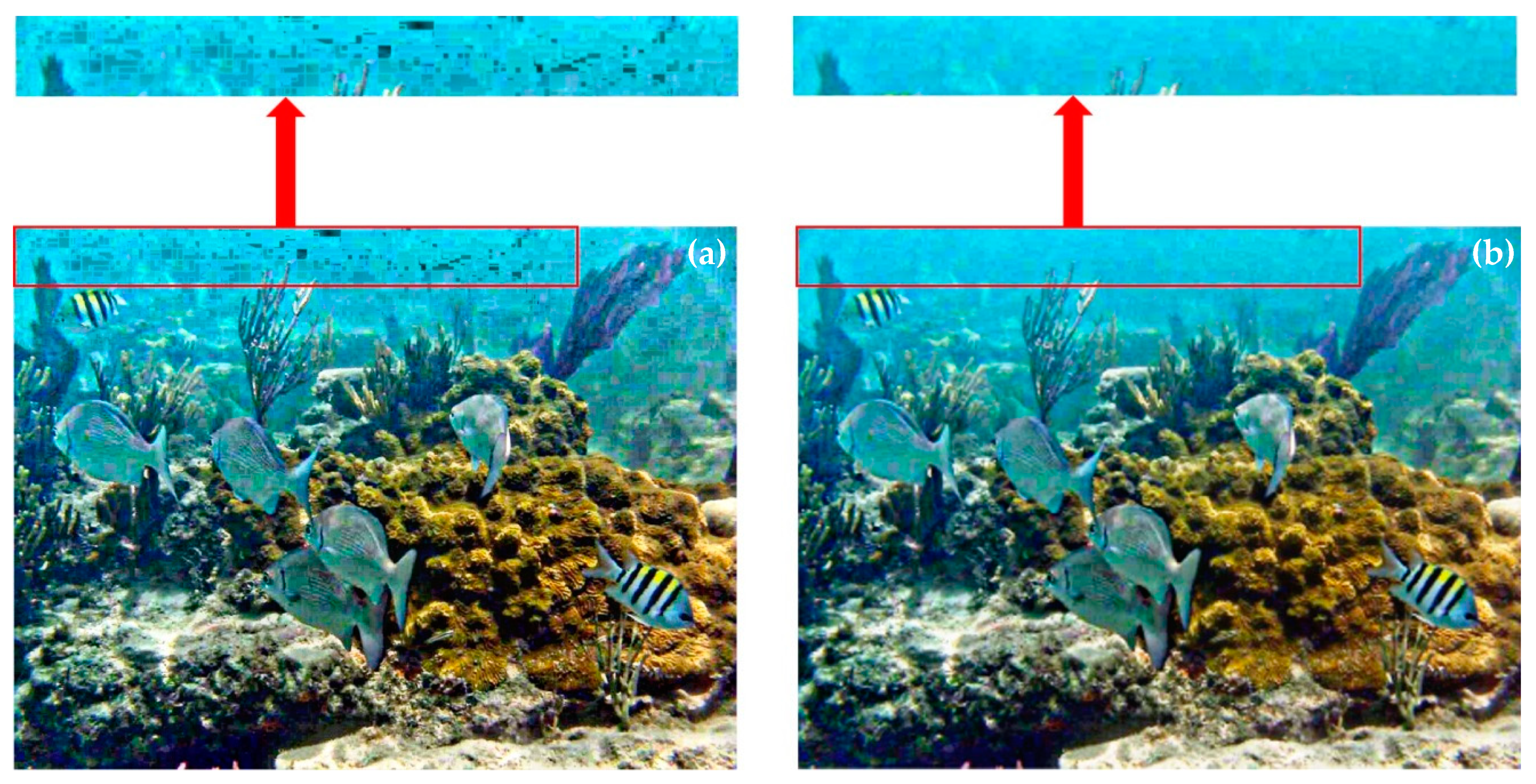
2.3. Image Sharpening
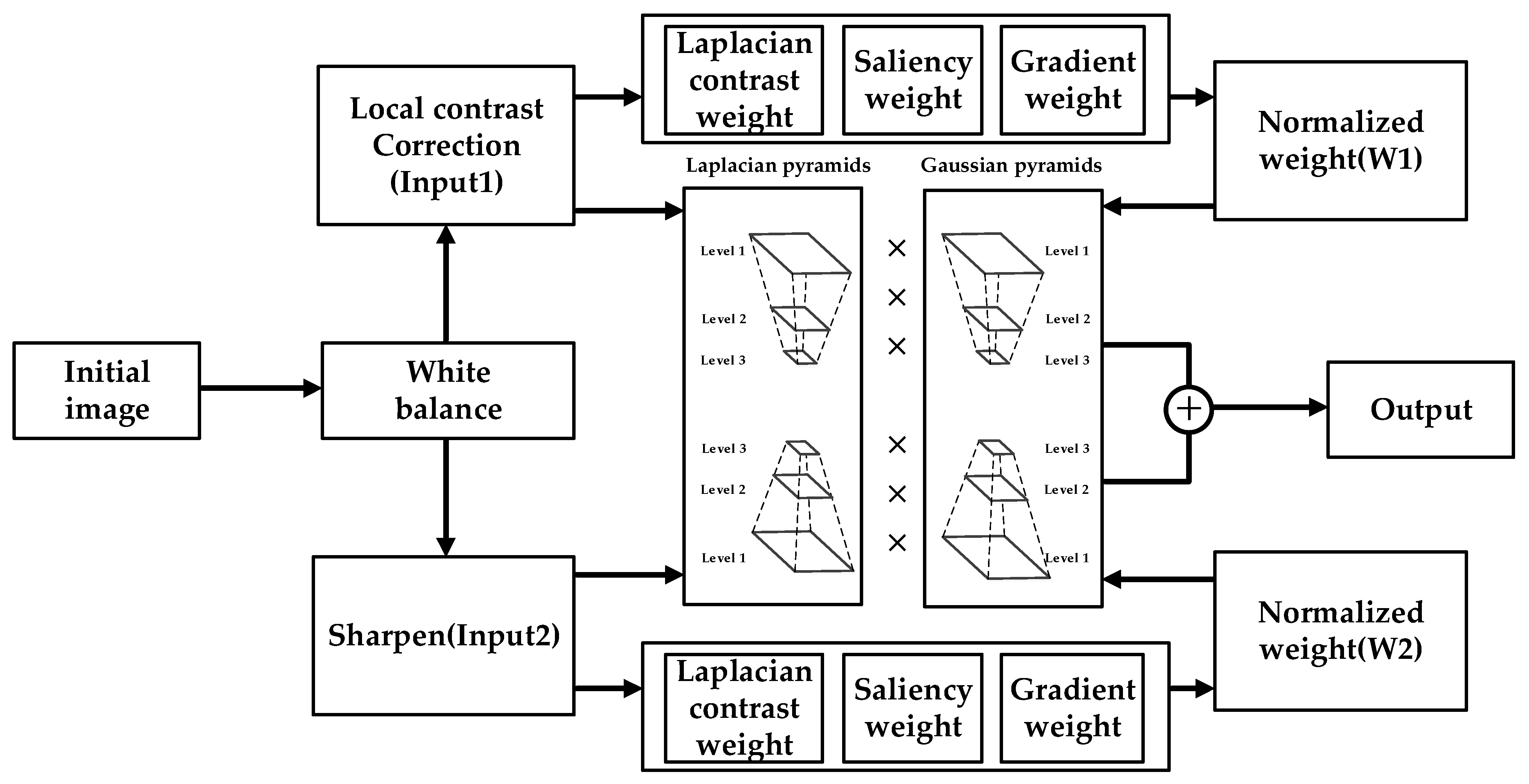
2.4. Multi-Scale Fusion
2.4.1. Selection of Weights
2.4.2. Multi-Scale Fusion
2.5. Underwater Image Quality Evaluation Metric
3. Results and Discussion
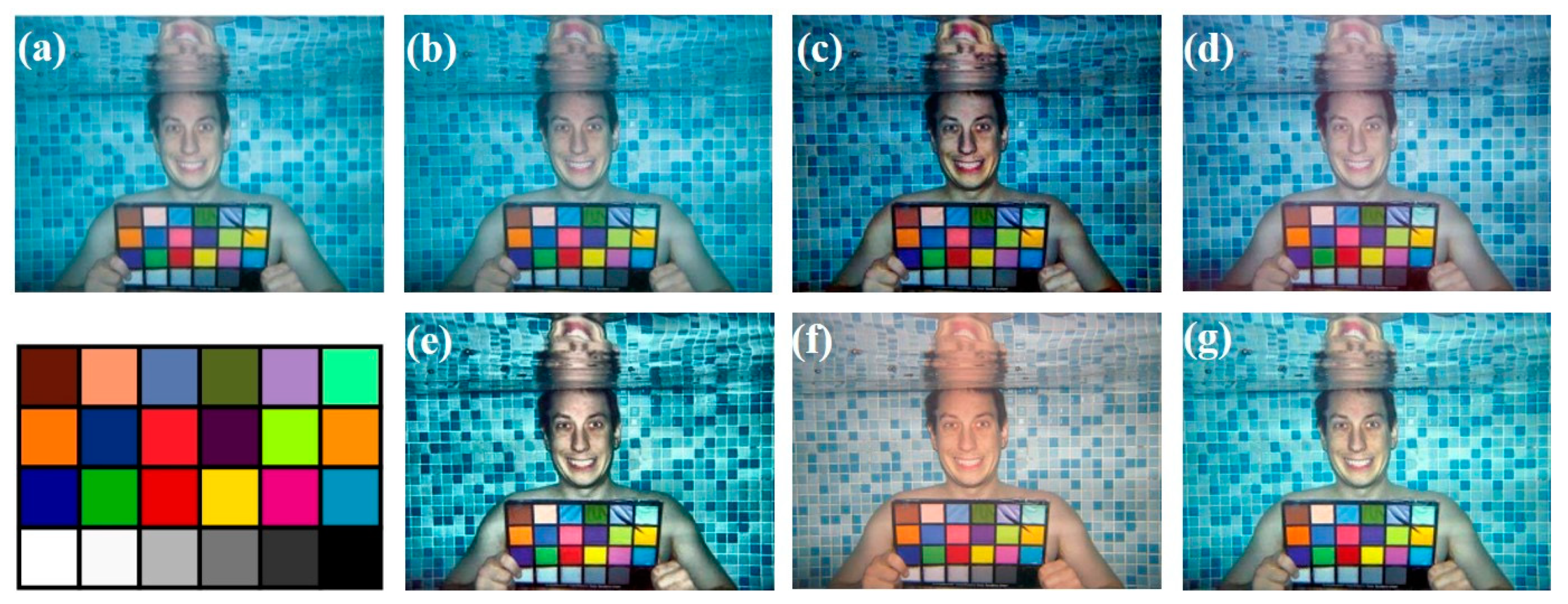
3.1. Color Restoration Experiment
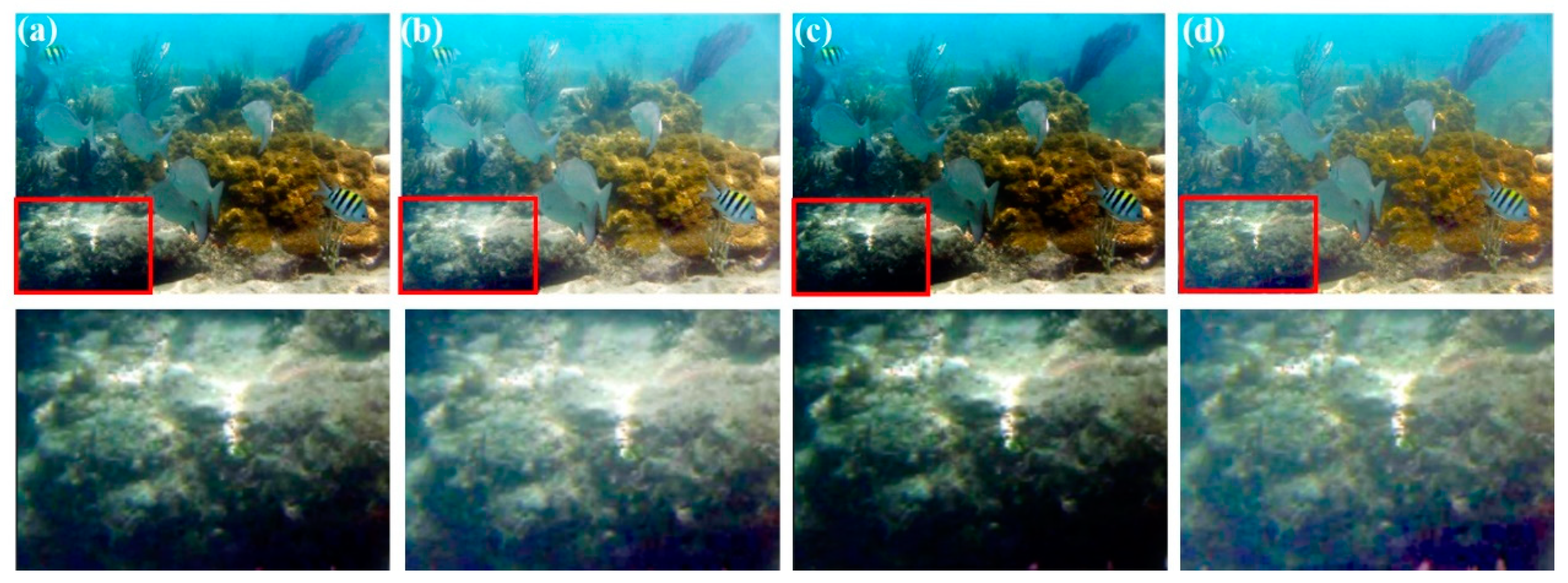
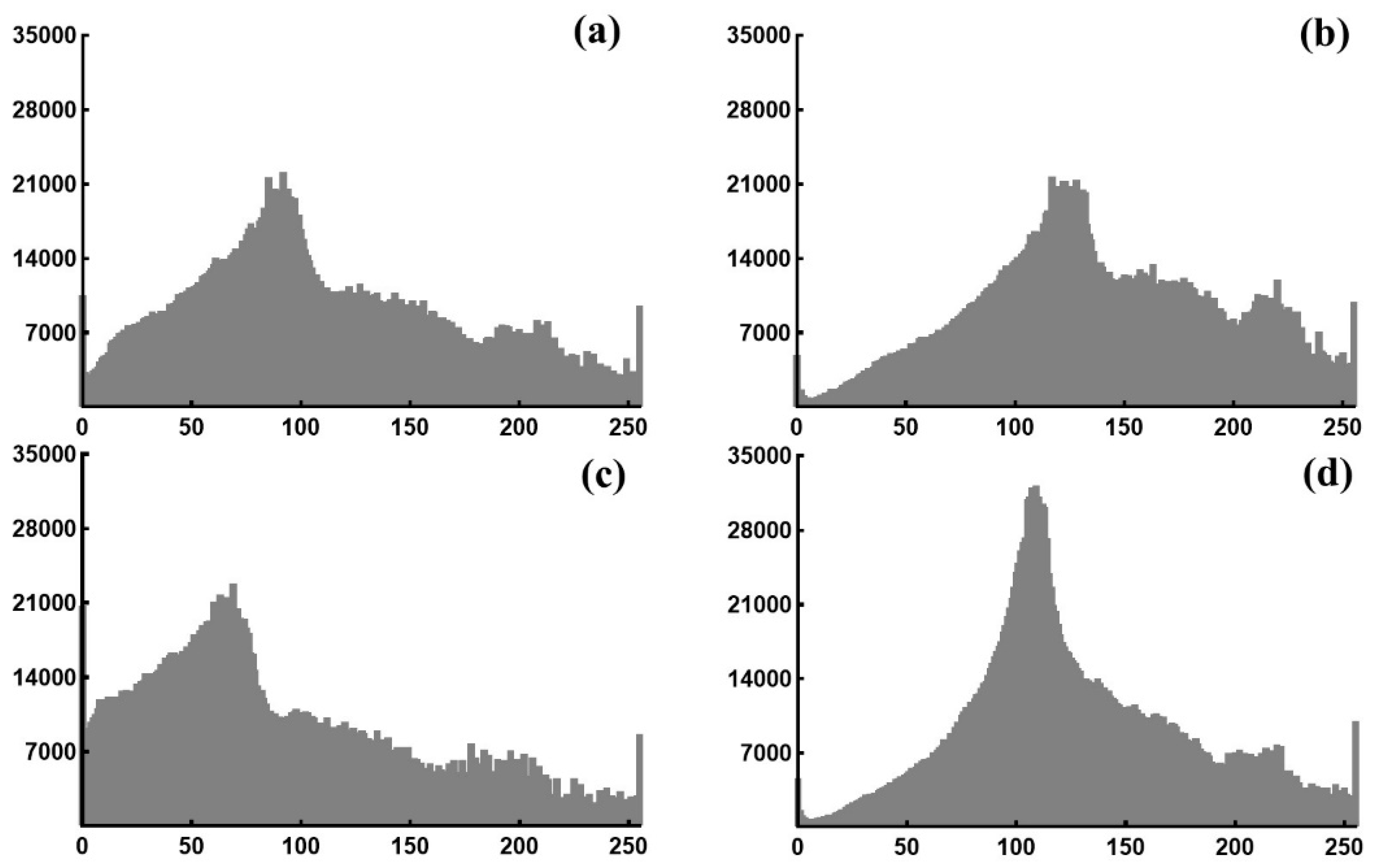
3.2. Contrast Correction Experiment
3.3. Comparison of Simple Weighted Fusion and Multi-Scale Fusion
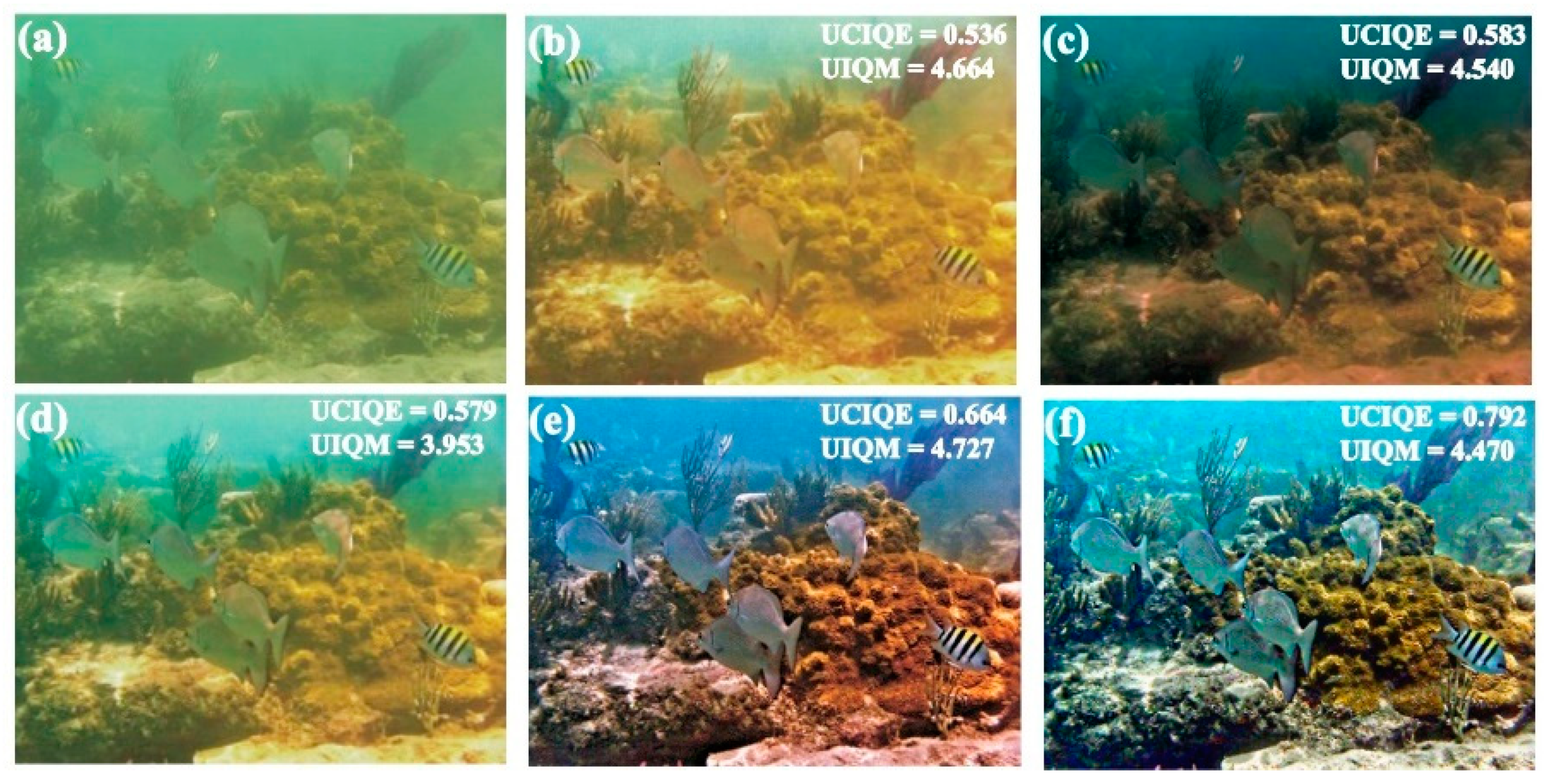
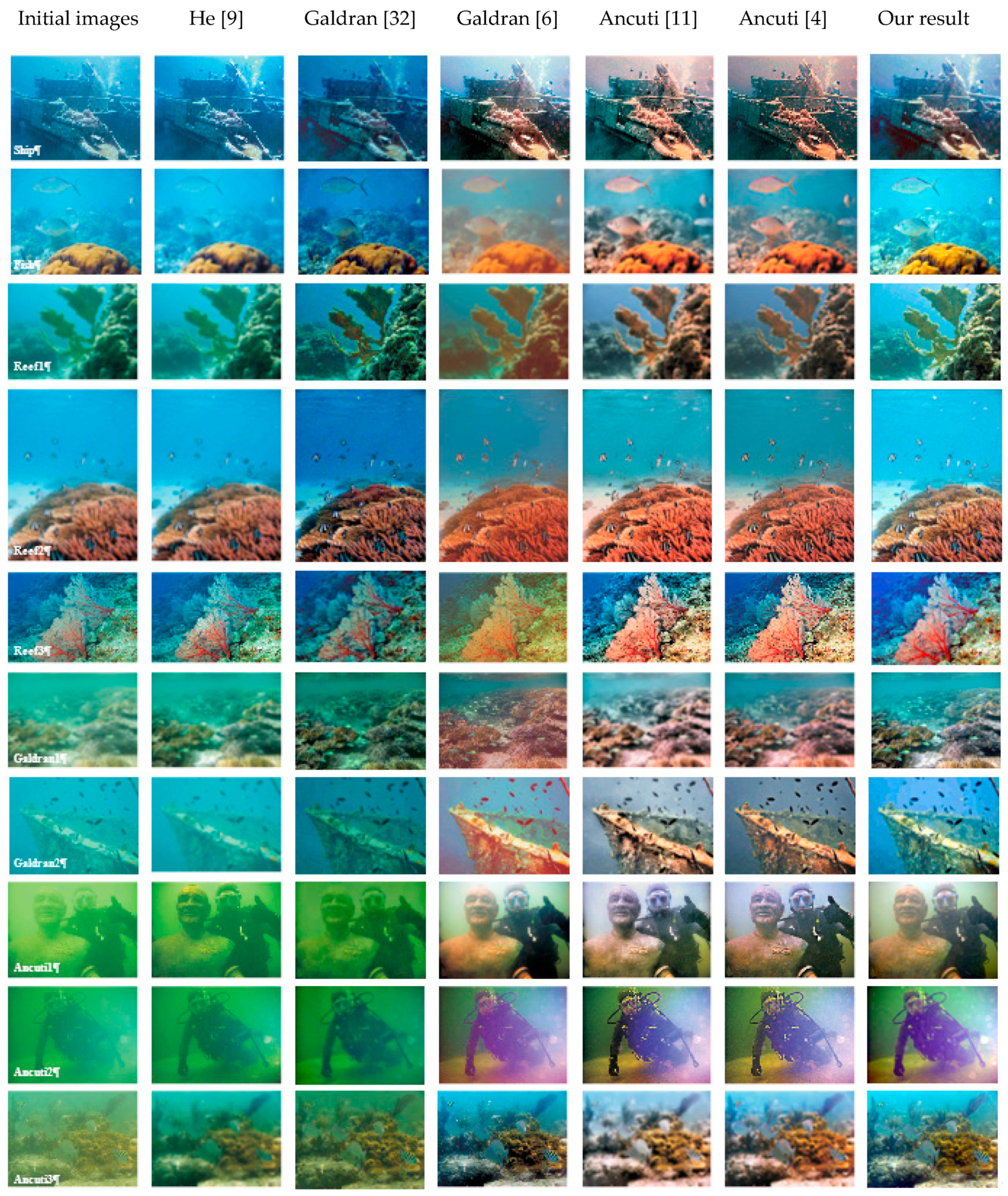
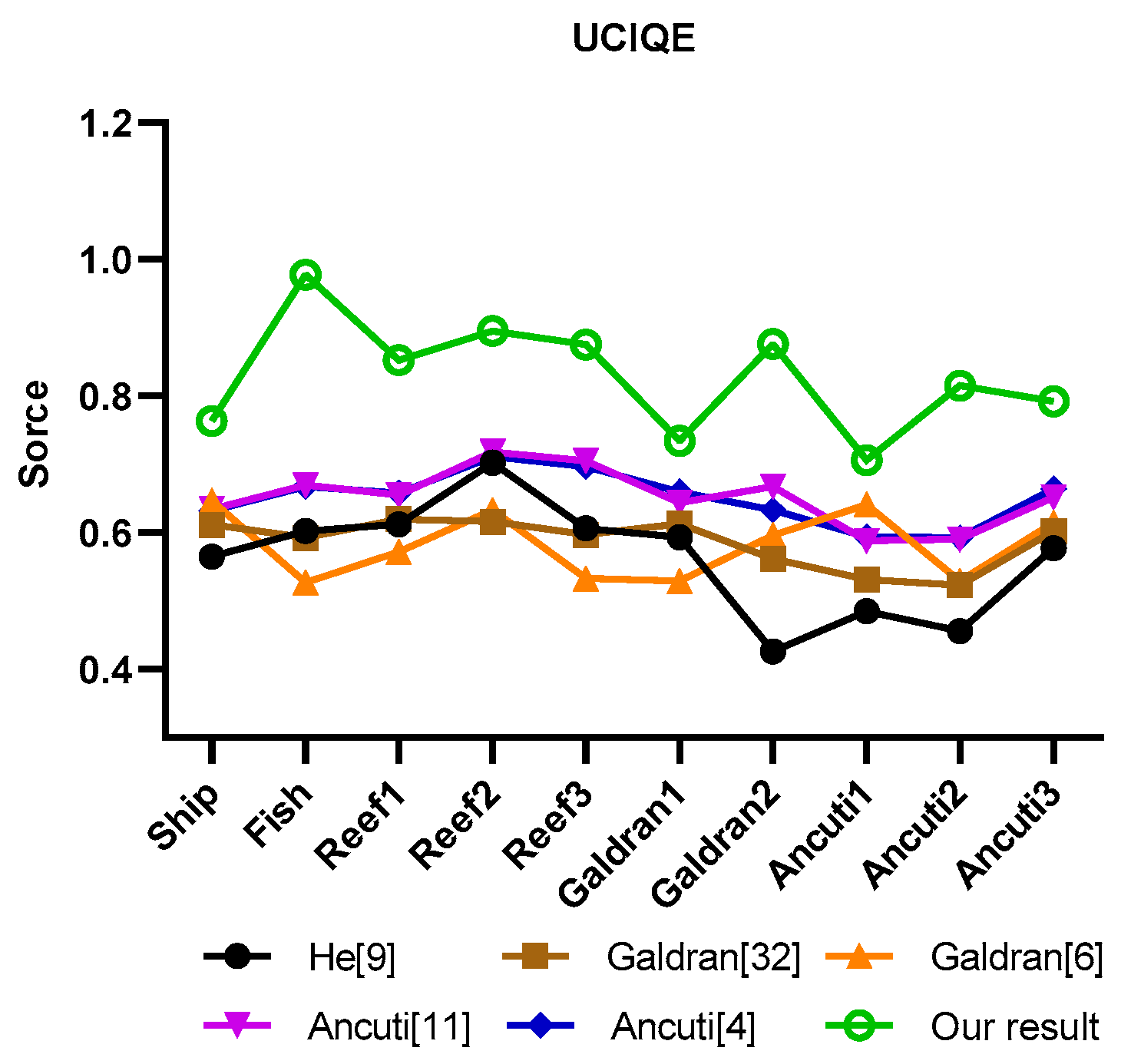
3.4. Image Qulity Evaluation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, M.; Sowmya, A. An underwater color image quality evaluation metric. IEEE Trans. Image Process. 2015, 24, 6062–6071. [Google Scholar] [CrossRef] [PubMed]
- Wang, N.; Zheng, H.; Zheng, B. Underwater image restoration via maximum attenuation identification. IEEE Access 2017, 5, 18941–18952. [Google Scholar] [CrossRef]
- Wang, Y.; Song, W.; Fortino, G.; Qi, L.-Z.; Zhang, W.; Liotta, A. An experimental-based review of image enhancement and image restoration methods for underwater imaging. IEEE Access 2019, 7, 140233–140251. [Google Scholar] [CrossRef]
- Ancuti, C.O.; Ancuti, C.; De Vleeschouwer, C.; Bekaert, P. Color balance and fusion for underwater image enhancement. IEEE Trans. Image Process. 2017, 27, 379–393. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, H.; Li, Y.; Zhang, L.; Serikawa, S. Contrast enhancement for images in turbid water. J. Opt. Soc. Am. A 2015, 32, 886–893. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Galdran, A.; Pardo, D.; Picón, A.; Alvarez-Gila, A. Automatic red-channel underwater image restoration. J. Vis. Commun. Image Represent. 2015, 26, 132–145. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Qu, Y.; Hong, M. Underwater-GAN: Underwater Image Restoration via Conditional Generative Adversarial Network. In ICPR 2018: Pattern Recognition and Information Forensics; Springer: Cham, Switzerland, 2018; pp. 66–75. [Google Scholar]
- Hou, G.; Pan, Z.; Wang, G.; Yang, H.; Duan, J. An efficient nonlocal variational method with application to underwater image restoration. Neurocomputing 2019, 369, 106–121. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 2341–2353. [Google Scholar]
- Chiang, J.Y.; Chen, Y.-C. Underwater image enhancement by wavelength compensation and dehazing. IEEE Trans. Image Process. 2011, 21, 1756–1769. [Google Scholar] [CrossRef]
- Ancuti, C.; Ancuti, C.O.; Haber, T.; Bekaert, P. Enhancing underwater images and videos by fusion. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 81–88. [Google Scholar]
- Li, C.; Guo, J.; Guo, C. Emerging from water: Underwater image color correction based on weakly supervised color transfer. IEEE Signal Process. Lett. 2018, 25, 323–327. [Google Scholar] [CrossRef] [Green Version]
- Buchsbaum, G. A spatial processor model for object colour perception. J. Frankl. Inst. 1980, 310, 1–26. [Google Scholar] [CrossRef]
- Land, E.H. The retinex theory of color vision. Sci. Am. 1977, 237, 108–129. [Google Scholar] [CrossRef]
- Ebner, M. Color Constancy; John Wiley & Sons: Hoboken, NJ, USA, 2007; Volume 7. [Google Scholar]
- Finlayson, G.D.; Trezzi, E. Shades of gray and colour constancy. In Proceedings of the Twelfth Color Imaging Conference: Color Science and Engineering Systems, Technologies, Applications, Scottsdale, AZ, USA, 9–12 November 2004; pp. 37–41. [Google Scholar]
- Van De Weijer, J.; Gevers, T.; Gijsenij, A. Edge-based color constancy. IEEE Trans. Image Process. 2007, 16, 2207–2214. [Google Scholar] [CrossRef] [Green Version]
- Gijsenij, A.; Gevers, T. Color constancy using natural image statistics and scene semantics. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 687–698. [Google Scholar] [CrossRef]
- Sethi, R.; Indu, S. Fusion of underwater image enhancement and restoration. Int. J. Pattern Recognit. Artif. Intell. 2020, 34, 2054007. [Google Scholar] [CrossRef]
- Ju, M.; Ding, C.; Guo, Y.J.; Zhang, D. Idgcp: Image dehazing based on gamma correction prior. IEEE Trans. Image Process. 2019, 29, 3104–3118. [Google Scholar] [CrossRef]
- Schettini, R.; Gasparini, F.; Corchs, S.; Marini, F.; Capra, A.; Castorina, A. Contrast image correction method. J. Electron Imaging 2010, 19, 023005. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Guided image filtering. In Computer Vision—ECCV 2010; Springer: Berlin/Heidelberg, Germany, 2012; pp. 1–14. [Google Scholar]
- Moroney, N. Local color correction using non-linear masking. In 8th Color and Imaging Conference Final Program and Proceedings, Proceedings of the 8th Color and Imaging Conference, Scottsdale, AZ, USA, 7–10 November 2000; Society for Imaging Science and Technology: Springfield, VA, USA, 2000; pp. 108–111. [Google Scholar]
- Nandhini, R.; Sivasakthi, T. Underwater image detection using laplacian and gaussian technique. In Proceedings of the 2020 7th International Conference on Smart Structures and Systems (ICSSS), Chennai, India, 23–24 July 2020; pp. 1–5. [Google Scholar]
- Cheng, M.-M.; Mitra, N.J.; Huang, X.; Torr, P.H.; Hu, S.-M. Global contrast based salient region detection. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 37, 569–582. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhai, Y.; Shah, M. Visual attention detection in video sequences using spatiotemporal cues. In Proceedings of the 14th ACM International Conference on Multimedia, Santa Barbara, CA, USA, 23–27 October 2006; pp. 815–824. [Google Scholar]
- Burt, P.; Adelson, E. The Laplacian pyramid as a compact image code. IEEE Trans. Commun. 1983, 31, 532–540. [Google Scholar] [CrossRef]
- Panetta, K.; Gao, C.; Agaian, S. Human-Visual-System-Inspired Underwater Image Quality Measures. IEEE J. Ocean. Eng. 2016, 41, 541–551. [Google Scholar] [CrossRef]
- Fattal, R. Dehazing using color-lines. ACM Trans. Graph. 2014, 34, 1–14. [Google Scholar] [CrossRef]
- Carlevaris-Bianco, N.; Mohan, A.; Eustice, R.M. Initial results in underwater single image dehazing. In Proceedings of the Oceans 2010 Mts/IEEE Seattle, Seattle, WA, USA, 20–23 September 2010; pp. 1–8. [Google Scholar]
- Anwar, S.; Li, C. Diving deeper into underwater image enhancement: A survey. Signal Process. Image Commun. 2020, 89, 115978. [Google Scholar] [CrossRef]
- Galdran, A. Image dehazing by artificial multiple-exposure image fusion. Signal Process. 2018, 149, 135–147. [Google Scholar] [CrossRef]
- Gibson, K.B.; Vo, D.T.; Nguyen, T.Q. An investigation of dehazing effects on image and video coding. IEEE Trans. Image Process. 2011, 21, 662–673. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Guo, C.; Ren, W.; Cong, R.; Hou, J.; Kwong, S.; Tao, D. An underwater image enhancement benchmark dataset and beyond. IEEE Trans. Image Process. 2019, 29, 4376–4389. [Google Scholar] [CrossRef] [PubMed] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UICM | ||||||
|---|---|---|---|---|---|---|
| (a) Initial image | (b) He [9] | (c) Galdran [32] | (d) Galdran [6] | (e) Ancuti [11] | (f) Ancuti [4] | (g) Our result |
| 0.0122 | 0.0121 | 0.0143 | 0.0149 | 0.0163 | 0.0151 | 0.0156 |
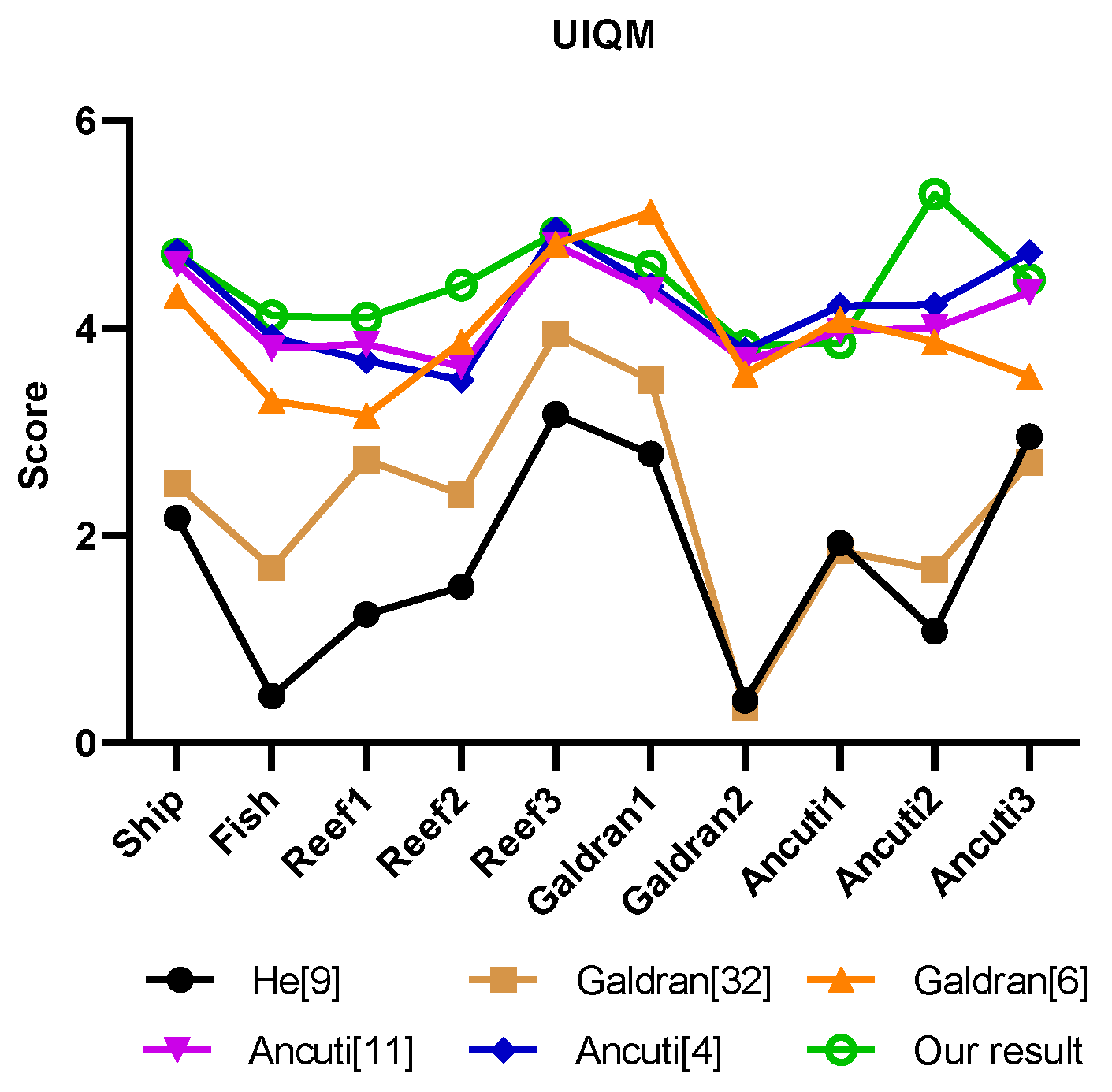
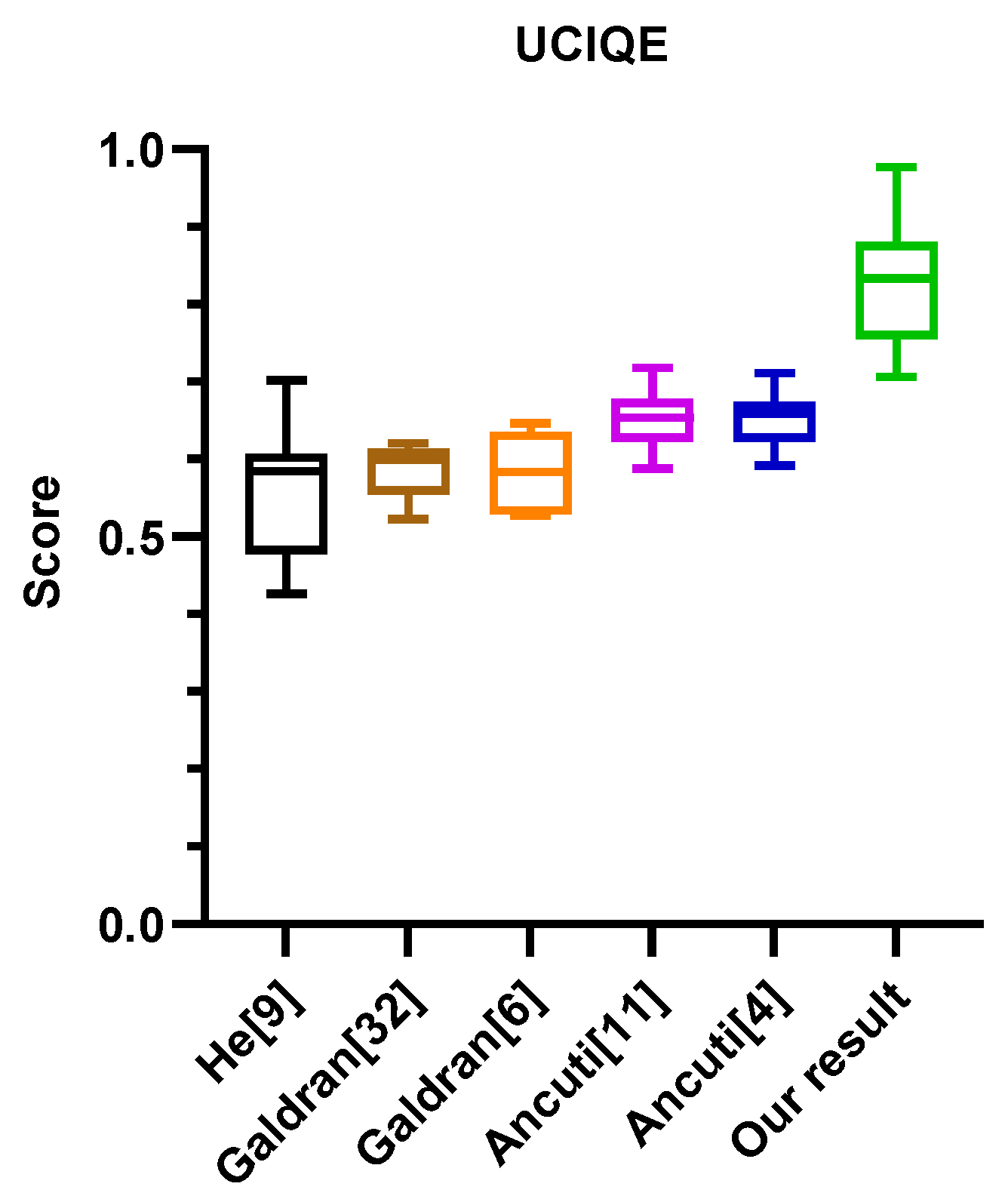
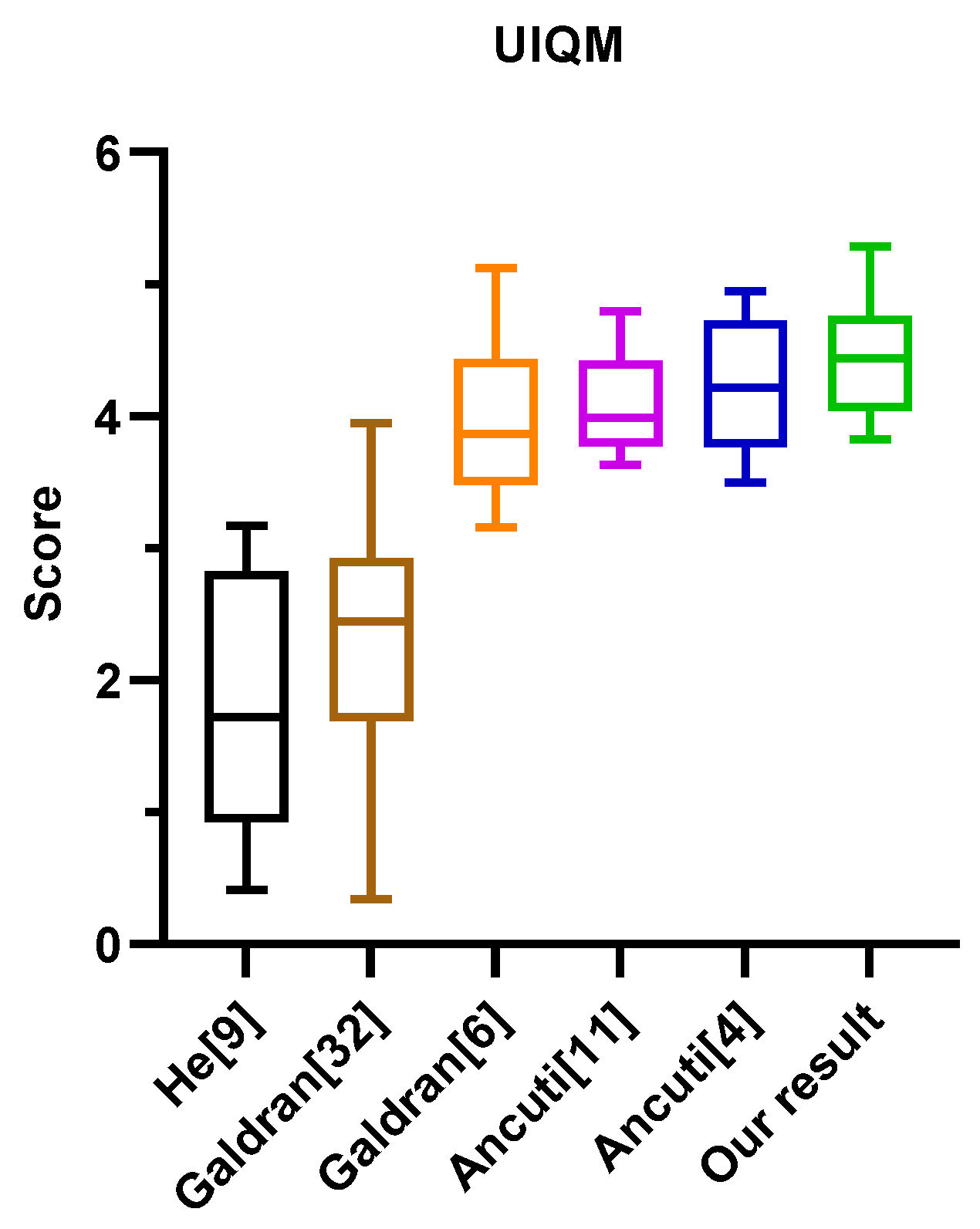
| He [9] | Galdran [32] | Galdran [6] | Ancuti [11] | Ancuti [4] | Our Result | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| UCIQE | UIQM | UCIQE | UIQM | UCIQE | UIQM | UCIQE | UIQM | UCIQE | UIQM | UCIQE | UIQM | |
| Ship | 0.565 | 2.171 | 0.611 | 2.499 | 0.646 | 4.309 | 0.634 | 4.616 | 0.632 | 4.738 | 0.763 | 4.714 |
| Fish | 0.602 | 0.453 | 0.592 | 1.690 | 0.527 | 3.301 | 0.669 | 3.802 | 0.667 | 3.916 | 0.977 | 4.119 |
| Reef1 | 0.612 | 1.240 | 0.620 | 2.732 | 0.572 | 3.155 | 0.655 | 3.845 | 0.658 | 3.685 | 0.852 | 5.145 |
| Reef2 | 0.702 | 1.508 | 0.616 | 2.396 | 0.633 | 3.868 | 0.718 | 3.630 | 0.711 | 3.496 | 0.895 | 4.099 |
| Reef3 | 0.606 | 3.169 | 0.597 | 3.946 | 0.533 | 4.811 | 0.705 | 4.798 | 0.697 | 4.948 | 0.875 | 5.095 |
| Galdran1 | 0.593 | 2.785 | 0.613 | 3.499 | 0.529 | 5.120 | 0.643 | 4.356 | 0.659 | 4.401 | 0.734 | 4.599 |
| Galdran2 | 0.426 | 0.412 | 0.562 | 0.344 | 0.596 | 3.558 | 0.667 | 3.679 | 0.633 | 3.788 | 0.876 | 3.828 |
| Ancuti1 | 0.485 | 1.927 | 0.531 | 1.853 | 0.641 | 4.082 | 0.588 | 3.971 | 0.594 | 4.215 | 0.706 | 3.853 |
| Ancuti2 | 0.456 | 1.081 | 0.523 | 1.672 | 0.529 | 3.871 | 0.590 | 4.003 | 0.592 | 4.223 | 0.815 | 5.289 |
| Ancuti3 | 0.577 | 2.954 | 0.602 | 2.704 | 0.614 | 3.534 | 0.652 | 4.347 | 0.664 | 4.727 | 0.792 | 4.470 |
| Average | 0.562 | 1.770 | 0.587 | 2.333 | 0.582 | 3.961 | 0.652 | 4.105 | 0.651 | 4.213 | 0.829 | 4.521 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, F.; Wang, K.; Yang, Z.; Wang, Y.; Zhang, Q. Underwater Image Enhancement Based on Local Contrast Correction and Multi-Scale Fusion. J. Mar. Sci. Eng. 2021, 9, 225. https://doi.org/10.3390/jmse9020225
Gao F, Wang K, Yang Z, Wang Y, Zhang Q. Underwater Image Enhancement Based on Local Contrast Correction and Multi-Scale Fusion. Journal of Marine Science and Engineering. 2021; 9(2):225. https://doi.org/10.3390/jmse9020225
Chicago/Turabian StyleGao, Farong, Kai Wang, Zhangyi Yang, Yejian Wang, and Qizhong Zhang. 2021. "Underwater Image Enhancement Based on Local Contrast Correction and Multi-Scale Fusion" Journal of Marine Science and Engineering 9, no. 2: 225. https://doi.org/10.3390/jmse9020225
APA StyleGao, F., Wang, K., Yang, Z., Wang, Y., & Zhang, Q. (2021). Underwater Image Enhancement Based on Local Contrast Correction and Multi-Scale Fusion. Journal of Marine Science and Engineering, 9(2), 225. https://doi.org/10.3390/jmse9020225