
A Novel Continuous Nonsingular Finite–Time Control for Underwater Robot Manipulators



Abstract
:1. Introduction
2. Problem Formulation
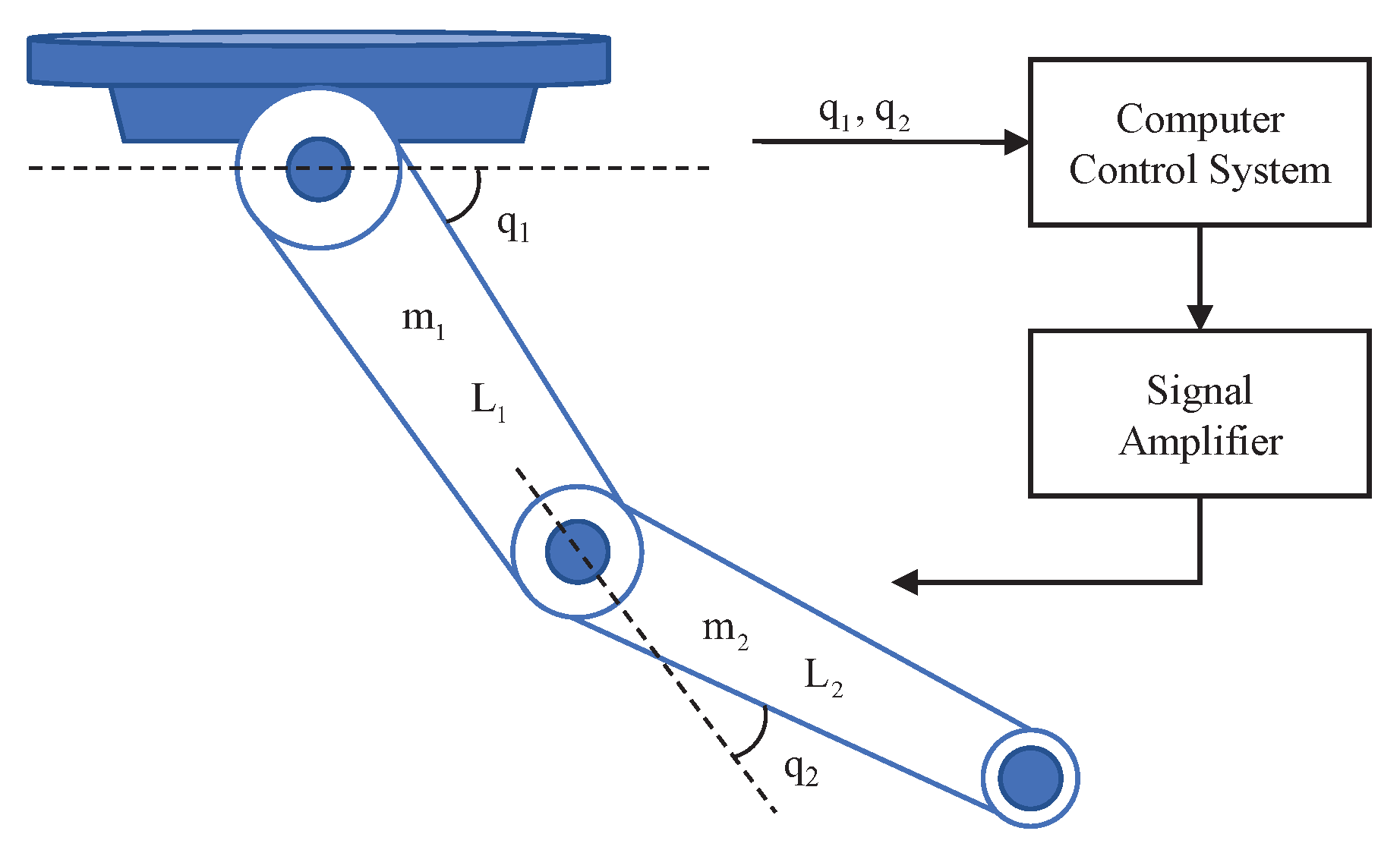
2.1. Underwater Robot Manipulator Model and Properties
2.2. Fundamental Facts
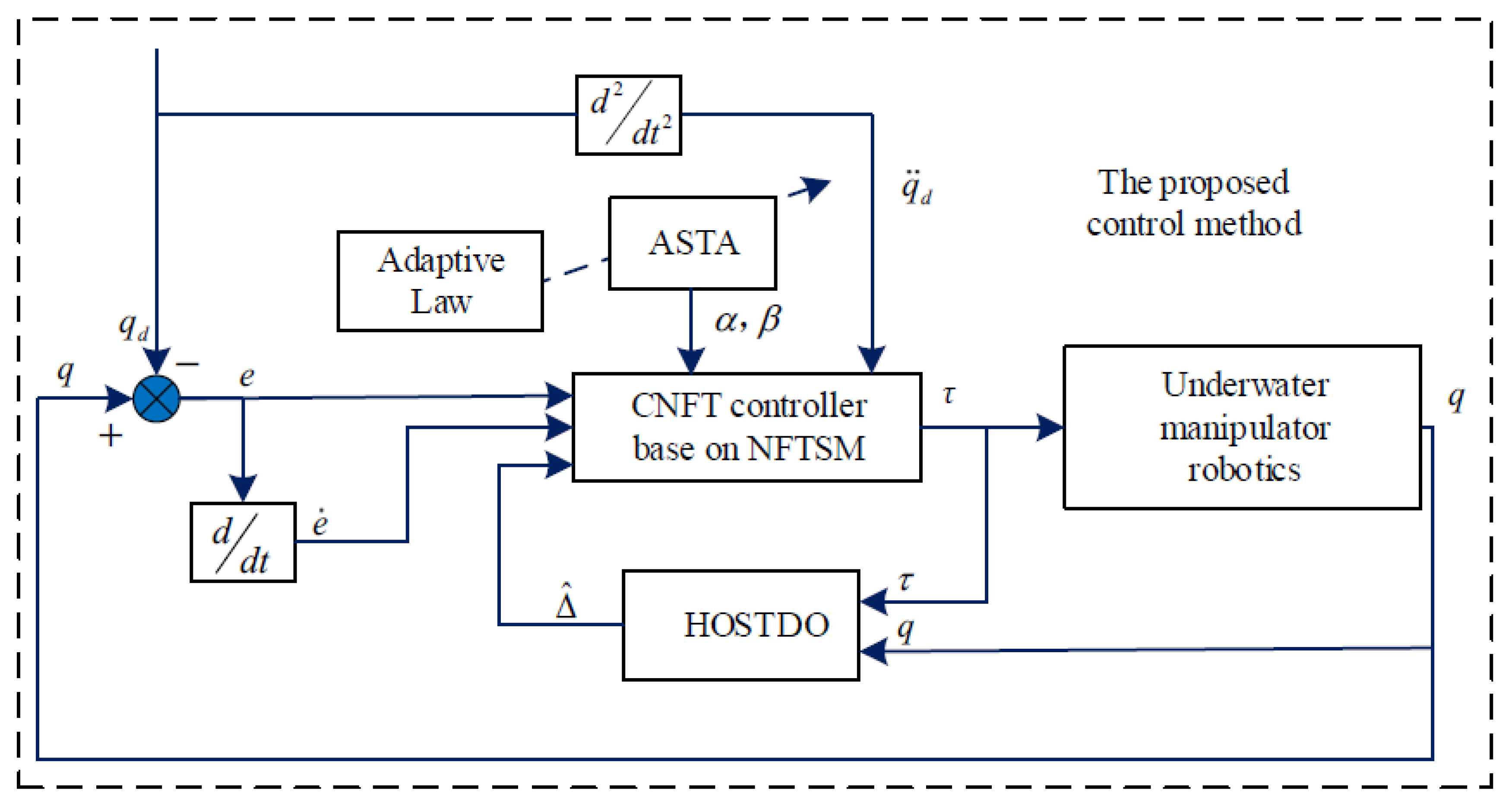
3. The Design of CNFT Control Based on HOSTDO and ASTA
3.1. The Design of HOSTDO
3.2. HOSTDO Based CNFT Control Design with ASTA Method and Time–Varying Gain Matrix
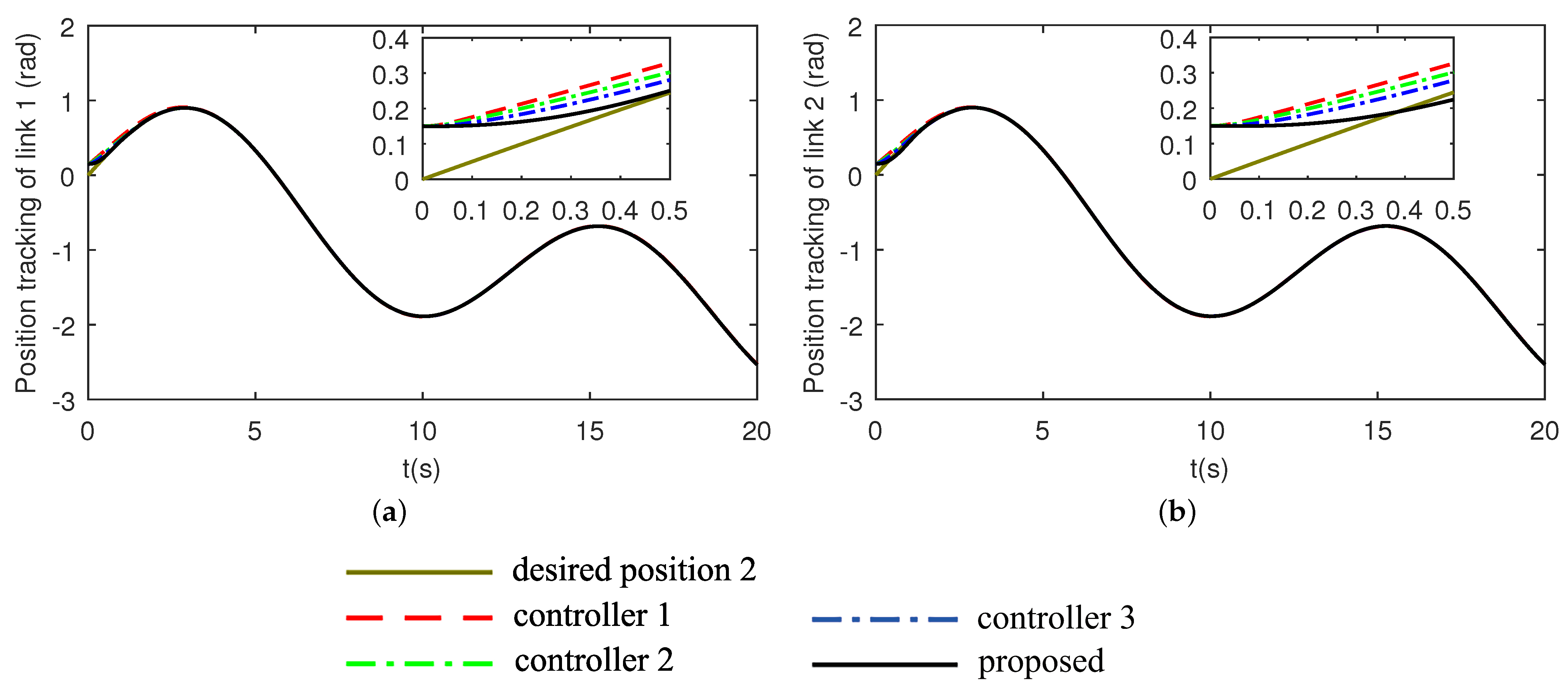
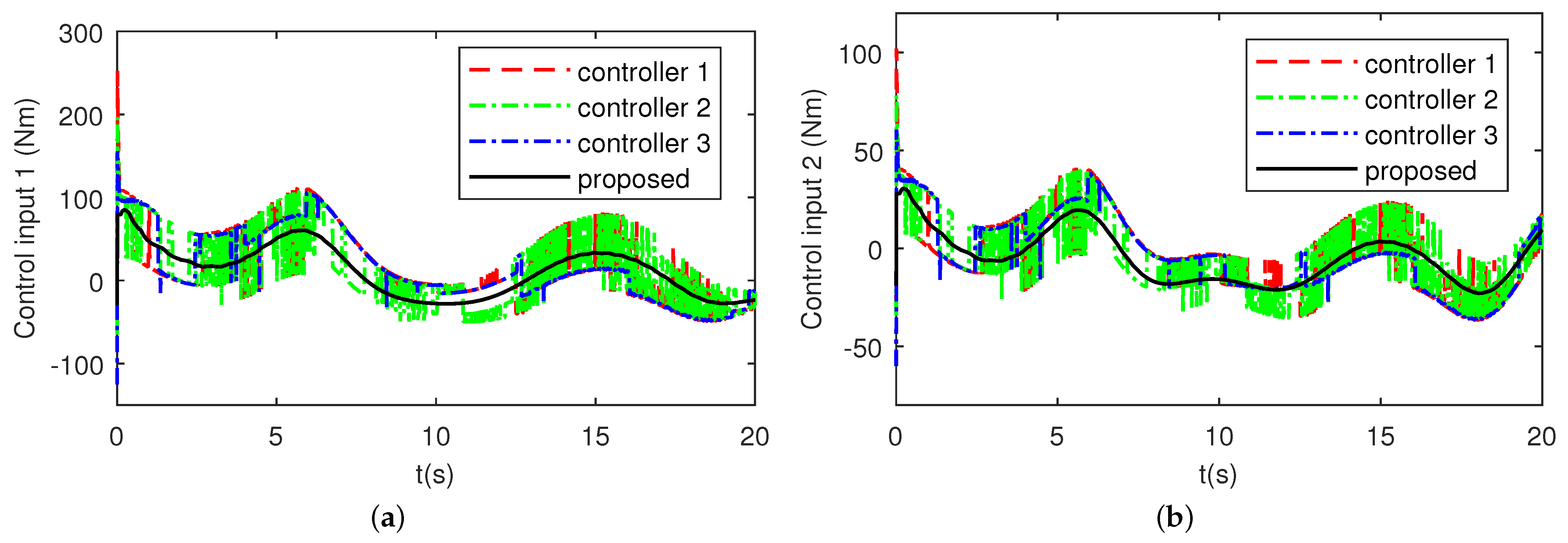
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Qiao, L.; Zhang, W. Double–loop integral terminal sliding mode tracking control for UUVs with adaptive dynamic compensation of uncertainties and disturbances. IEEE J. Ocean. Eng. 2019, 44, 29–53. [Google Scholar] [CrossRef]
- Leabourne, K.N.; Rock, S.M. Model development of an underwater manipulator for coordinated arm–vehicle control. In Proceedings of the OCEANS’98, Nice, France, 28 September–1 October 1998; Volume 2, pp. 941–946. [Google Scholar]
- Ioi, K.; Itoh, K. Modelling and simulation of an underwater manipulator. Adv. Robot. 1989, 4, 303–317. [Google Scholar] [CrossRef]
- Zhang, M.; Liu, X.; Tian, Y. Modeling Analysis and Simulation of Viscous Hydrodynamic Model of Single–DOF Manipulator. J. Mar. Sci. Eng. 2019, 7, 261. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; You, Z.; Song, W.; Zhu, S. Dynamic Analysis of an Underwater Cable–Driven Manipulator with a Fluid–Power Buoyancy Regulation System. Micromachines 2020, 11, 1042. [Google Scholar] [CrossRef] [PubMed]
- Tang, J.; Zhang, Y.; Huang, F. Design and Kinematic Control of the Cable–Driven Hyper–Redundant Manipulator for Potential Underwater Applications. Appl. Sci. 2019, 9, 1142. [Google Scholar] [CrossRef] [Green Version]
- Yao, J.; Wang, C. Model reference adaptive control for a hydraulic underwater manipulator. J. Vib. Control 2012, 18, 893–902. [Google Scholar] [CrossRef]
- Barbalata, C.; Dunnigan, M.W.; Petillot, Y. Coupled and Decoupled Force/Motion Controllers for an Underwater Vehicle–Manipulator System. J. Mar. Sci. Eng. 2018, 6, 96. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Tang, G.; Huang, H.; Han, L.; Xu, R. Adaptive nonsingular fast terminal sliding mode control for underwater manipulator robotics with asymmetric saturation actuators. Control Theory Technol. 2020, 18, 81–91. [Google Scholar] [CrossRef]
- Yang, C.; Yao, F.; Zhang, M.; Zhang, Z.; Wu, Z.; Dan, P. Adaptive Sliding Mode PID Control for Underwater Manipulator Based on Legendre Polynomial Function Approximation and Its Experimental Evaluation. Appl. Sci. 2020, 10, 1728. [Google Scholar] [CrossRef] [Green Version]
- Xu, R.; Tang, G.; Han, L.; Huang, H.; Xie, D. Robust finite–time attitude tracking control of a CMG–based AUV with unknown disturbances and input saturation. IEEE Access 2019, 7, 56409–56422. [Google Scholar] [CrossRef]
- Le, T.H.; Thanh, H.L.N.N.; Huynh, T.T.; Van, M.; Hoang, Q.D.; Do, T.D. Robust Position Control of an Over–actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors 2021, 21, 747. [Google Scholar]
- Thanh, H.L.N.N.; Vu, M.T.; Mung, N.X.; Nguyen, N.P.; Phuong, N.T. Perturbation Observer–Based Robust Control Using a Multiple Sliding Surfaces for Nonlinear Systems with Influences of Matched and Unmatched Uncertainties. Mathematics 2020, 8, 1371. [Google Scholar] [CrossRef]
- Vu, M.T.; Thang, H.T.T.L.; Thang, Q.; Duc, T.; Hoang, Q.D.; Le, T.H. Station–Keeping Control of a Hovering Over–Actuated Autonomous Underwater Vehicle Under Ocean Current Effects and Model Uncertainties in Horizontal Plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J. Nonsingular fast terminal sliding–mode control for nonlinear dynamical systems. Int. J. Robust Nonlinear Control 2011, 21, 1865–1879. [Google Scholar] [CrossRef]
- Zhao, L.; Jia, Y. Decentralized adaptive attitude synchronization control for spacecraft formation using nonsingular fast terminal sliding mode. Nonlinear Dyn. 2014, 78, 2779–2794. [Google Scholar] [CrossRef]
- Xu, S.S.; Chen, C.; Wu, Z. Study of nonsingular fast terminal sliding–mode fault–tolerant control. IEEE Trans. Ind. Electron. 2015, 62, 3906–3913. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, L.; Wang, Z.; Xia, Y. Continuous finite–time control for uncertain robot manipulators with integral sliding mode. IET Control Theory Appl. 2018, 12, 1621–1627. [Google Scholar] [CrossRef]
- Van, M.; Kang, H.J.; Suh, Y.S. Second order sliding mode–based output feedback tracking control for uncertain robot manipulators. Int. J. Adv. Robot. Syst. 2013, 10, 16. [Google Scholar] [CrossRef] [Green Version]
- Levant, A.; Alelishvili, L. Integral high–order sliding modes. IEEE Trans. Autom. Control 2007, 52, 1278–1282. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Yu, X.; Han, Q. Stability analysis of second–order sliding mode control systems with input–delay using poincaré map. IEEE Trans. Autom. Control 2013, 58, 2410–2415. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Q.; Yan, X.; Spurgeon, S.K. Integral sliding mode control for Markovian jump T–S fuzzy descriptor systems based on the super–twisting algorithm. IET Control Theory Appl. 2017, 11, 1134–1143. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Gu, H.; Zhang, J.; Ding, G. Terminal sliding mode control based on super–twisting algorithm. J. Syst. Eng. Electron. 2017, 28, 145–150. [Google Scholar] [CrossRef]
- Rehman, F.U.; Mufti, M.R.; Din, S.U.; Afzal, H.; Qureshi, M.I.; Khan, D.M. Adaptive Smooth Super–Twisting Sliding Mode Control of Nonlinear Systems With Unmatched Uncertainty. IEEE Access 2020, 8, 177932–177940. [Google Scholar] [CrossRef]
- Shtessel, Y.; Taleb, M.; Plestan, F. A novel adaptive–gain supertwisting sliding mode controller: Methodology and application. Automatica 2012, 48, 759–769. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S.; Ren, H. Finite time fault tolerant control for robot manipulators using time delay estimation and continuous nonsingular fast terminal sliding mode control. IEEE T. Cybern. 2017, 47, 1681–1693. [Google Scholar] [CrossRef]
- Wang, Y.; Yan, F.; Ju, F.; Chen, B.; Wu, H. Optimal nonsingular terminal sliding mode control of cable–driven manipulators using super–twisting algorithm and time–delay estimation. IEEE Access 2018, 6, 61039–61049. [Google Scholar] [CrossRef]
- Lin, C.; Sun, S.; Walker, P.; Zhang, N. Accelerated adaptive second order super–twisting sliding mode observer. IEEE Access 2019, 7, 25232–25238. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. A Lyapunov approach to second–order sliding mode controllers and observers. In Proceedings of the Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 2856–2861. [Google Scholar]
- Kumar, P.R.; Behera, A.K. Bandyopadhyay, B. Robust finite–time tracking of Stewart platform: A super–twisting like observer–based forward kinematics solution. IEEE Trans. Ind. Electron. 2017, 64, 3776–3785. [Google Scholar] [CrossRef]
- Cuong, P.V.; Nan, W.Y. Adaptive trajectory tracking neural network control with robust compensator for robot manipulators. Neural Comput. Appl. 2016, 27, 525–536. [Google Scholar] [CrossRef]
- Jia, P. Reach on Grasp Planning and Optimization of Grasping Forces for Robotic Dexterous Hands. Ph.D. Thesis, Mechanical and Electronic Engineering, Harbin Engineering University, Harbin, China, 2011. (In Chinese). [Google Scholar]
- Hong, Y.; Huang, J.; Xu, Y. On an output feedback finite–time stabilization problem. IEEE Trans. Autom. Control 2001, 46, 305–309. [Google Scholar] [CrossRef] [Green Version]
- Angulo, M.T.; Moreno, J.A.; Fridman, L. Robust exact uniformly convergent arbitrary order differentiator. Automatica 2013, 49, 2489–2495. [Google Scholar] [CrossRef]
- Han, Y.; Liu, X. Continuous higher–order sliding mode control with time–varying gain for a class of uncertain nonlinear systems. ISA Trans. 2016, 62, 193–201. [Google Scholar] [CrossRef] [PubMed]
- Capisani, L.M.; Ferrara, A.; Ferreira, A.; Fridman, L. Higher order sliding mode observers for actuator faults diagnosis in robot manipulators. In Proceedings of the IEEE ISIE, Bari, Italy, 4–7 July 2010; pp. 2103–2108. [Google Scholar]
- Vidal, P.V.N.M.; Nunes, E.V.L.; Hsu, L. Output–feedback multivariable global variable gain super–twisting algorithm. IEEE Trans. Autom. Control 2017, 62, 2999–3005. [Google Scholar] [CrossRef]
- Wang, Y.; Yan, F.; Chen, J.; Chen, B. Continuous nonsingular fast terminal sliding mode control of cable–driven manipulators with super–twisting algorithm. IEEE Access 2018, 6, 49626–49636. [Google Scholar] [CrossRef]
- Song, H.; Zhang, T. Fast Robust Integrated Guidance and Control Design of Interceptors. IEEE Trans. Control. Syst. Technol. 2016, 24, 349–356. [Google Scholar] [CrossRef]
- Plestan, F.; Shtessel, Y.; Brégeault, V.; Poznyak, A. New methodologies for adaptive sliding mode control. Int. J. Control 2010, 83, 1907–1919. [Google Scholar] [CrossRef] [Green Version]
- Mondal, S.; Mahanta, C. Adaptive second order terminal sliding mode controller for robotic manipulators. J. Franklin Inst. Eng. Appl. Math. 2014, 351, 2356–2377. [Google Scholar] [CrossRef]
- Skogestad, S. Simple analytic rules for model reduction and PID controller tuning. J. Process Control 2003, 13, 291–309. [Google Scholar] [CrossRef] [Green Version]
- Islam, S.; Liu, X.P. Robust sliding mode control for robot manipulators. IEEE Trans. Ind. Electron. 2011, 58, 2444–2453. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous finite–time control for robotic manipulators with terminal sliding mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| Parameters of the manipulator system | |||||
| 3.39 kg | 0.04 m | 1 m | |||
| 3.39 kg | 0.04 m | 1 m | |||
| 1000 kg/m | 0.6 | g | 9.8 m/s | ||
| 2700 kg/m | |||||
| Parameters of the model simulation comparison | |||||
| Parameters of SM surfaces | 1 | 1 | |||
| 1 | 1 | ||||
| l | 7 | 7 | |||
| p | 9 | 9 | |||
| 1.3 | |||||
| Gains of SM reaching laws | 20 | 20 | |||
| 20 | 0.1 | ||||
| 0.1 | 0.1 | ||||
| 2 | 2 | ||||
| 2 | 0.1 | ||||
| Parameters of the ASTA | 15 | 0.1 | |||
| 5 | 2 | ||||
| 0.5 | 0.5 | ||||
| 0.05 | 0.5 | ||||
| Parameters of the HOSTDO | 8 | 22 | |||
| 8 | 2 | ||||
| Type of Controller | Link | IAE | RMSE | ECI |
|---|---|---|---|---|
| Controller 1 | 1 | 18.120 | 0.022718 | 4.1162 |
| 2 | 15.813 | 0.021560 | 7.4115 | |
| Controller 2 | 1 | 7.7463 | 0.016877 | 4.5057 |
| 2 | 7.7831 | 0.016592 | 8.1977 | |
| Controller 3 | 1 | 5.7875 | 0.014082 | 4.2817 |
| 2 | 5.5934 | 0.013763 | 7.5878 | |
| Proposed | 1 | 3.4521 | 0.011636 | 2.0673 |
| 2 | 5.2355 | 0.012449 | 3.9025 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Tang, G.; Xu, R.; Han, L.; Cheng, M. A Novel Continuous Nonsingular Finite–Time Control for Underwater Robot Manipulators. J. Mar. Sci. Eng. 2021, 9, 269. https://doi.org/10.3390/jmse9030269
Zhou Z, Tang G, Xu R, Han L, Cheng M. A Novel Continuous Nonsingular Finite–Time Control for Underwater Robot Manipulators. Journal of Marine Science and Engineering. 2021; 9(3):269. https://doi.org/10.3390/jmse9030269
Chicago/Turabian StyleZhou, Zengcheng, Guoyuan Tang, Ruikun Xu, Lijun Han, and Maolin Cheng. 2021. "A Novel Continuous Nonsingular Finite–Time Control for Underwater Robot Manipulators" Journal of Marine Science and Engineering 9, no. 3: 269. https://doi.org/10.3390/jmse9030269
APA StyleZhou, Z., Tang, G., Xu, R., Han, L., & Cheng, M. (2021). A Novel Continuous Nonsingular Finite–Time Control for Underwater Robot Manipulators. Journal of Marine Science and Engineering, 9(3), 269. https://doi.org/10.3390/jmse9030269