
Adaptive Digital Disturbance Rejection Controller Design for Underwater Thermal Vehicles


Abstract
:1. Introduction
- At the current stage, the development of control strategies for underwater vehicles is mainly focused on the traditional analog controller design. Although the accuracy of analog controllers is relatively high, the structure is very complex. It is not suitable for underwater vehicles. With breakthroughs in digital computer technology, digital controllers have excellent performance and low cost-effectiveness. Compared with analog controllers, this paper’s digital controller has a simple structure, strong anti-interference ability, and a more straightforward control structure, making it easier to implement in hardware;
- A robust digital controller is designed. When the disturbance signal is known, the low-order disturbance can be well rejected by the simple parameterized controller. When the disturbance signal is unknown, the unknown frequency and amplitude can be accurately and quickly identified by the system identification algorithm, thus achieving a perfect estimation of the disturbance signal. On this basis, the parameterized controller can then be used for disturbance rejection. Compared to adaptive frequency estimators [19,37,38,39] and adaptive observers [40,41,42], the robust digital controller approach based on parameter identification is easier to deal with random signals and un-modeled dynamics in real-time for multiple frequencies. It can be applied in the application of underwater vehicle disturbances rejection.
2. Working Principle and Mathematical Model
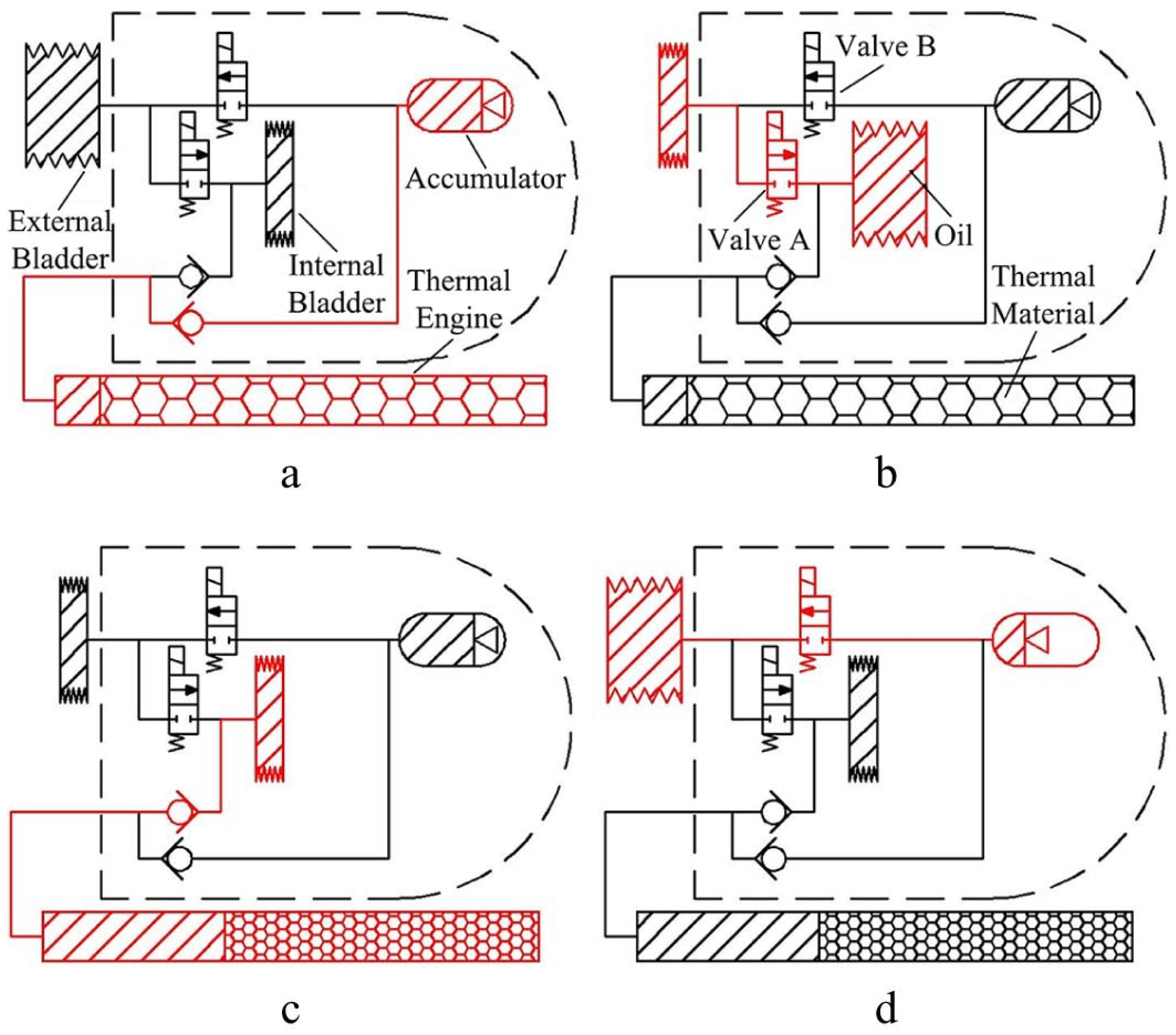
2.1. Working Principle
- The vehicle initially drift on the sea surface, as shown in Figure 2a. Because of the high temperature of seawater, the PCM in the thermal machine is in liquid state. At this stage the working fluid is stored in the external bladder.
- When the vehicle is prepared to dive, as shown in Figure 2b. The solenoid valve is opened, and the working fluid flows from the external bladder to the internal bladder. The volume of the vehicle is reduced, resulting in less buoyancy than gravity, and the vehicle sails to the deep ocean. When the vehicle sails to the deep sea, as shown in Figure 2c, the PCM solidifies and shrinks, causing a negative pressure in the thermal engine. Then the transfer fluid in the internal bladder flows into the thermal engine under this pressure difference.
- When the vehicle is ready to ascend from the deep sea to the surface of the ocean, the channel in the solenoid valve that connects the accumulator to the external bladder is opened, as shown in Figure 2d. The working fluid stored in the accumulator flows into the external bladder. As a result, the volume of the vehicle increases, which causes the buoyancy force to be higher than gravity, and the vehicle sails upward.
- When the vehicle dives up to warmer waters, the temperature around it gets higher. As a consequence, the PCM transforms from solid into liquid and expands. The working fluid in the thermal engine is then compressed into the accumulator for energy storage. When the PCM is completely melted, the thermal vehicle will return to the initial state shown in Figure 2a for the next cycle.
2.2. Mathematical Model
- The center of buoyancy in a thermal vehicle can be considered to be constant. Buoyancy can be alternately reduced or increased by its buoyancy adjustment system while maintaining a nearly constant overall vehicle mass. The system decreases or increases the buoyancy to achieve a descending or ascending motion of the vehicle in the ocean;
- The change of mass distribution in the vehicle caused by the actuator motion is neglected. The mass of the center of gravity adjustment is very small, and it can be neglected compared to the total mass and length of the thermal vehicle;
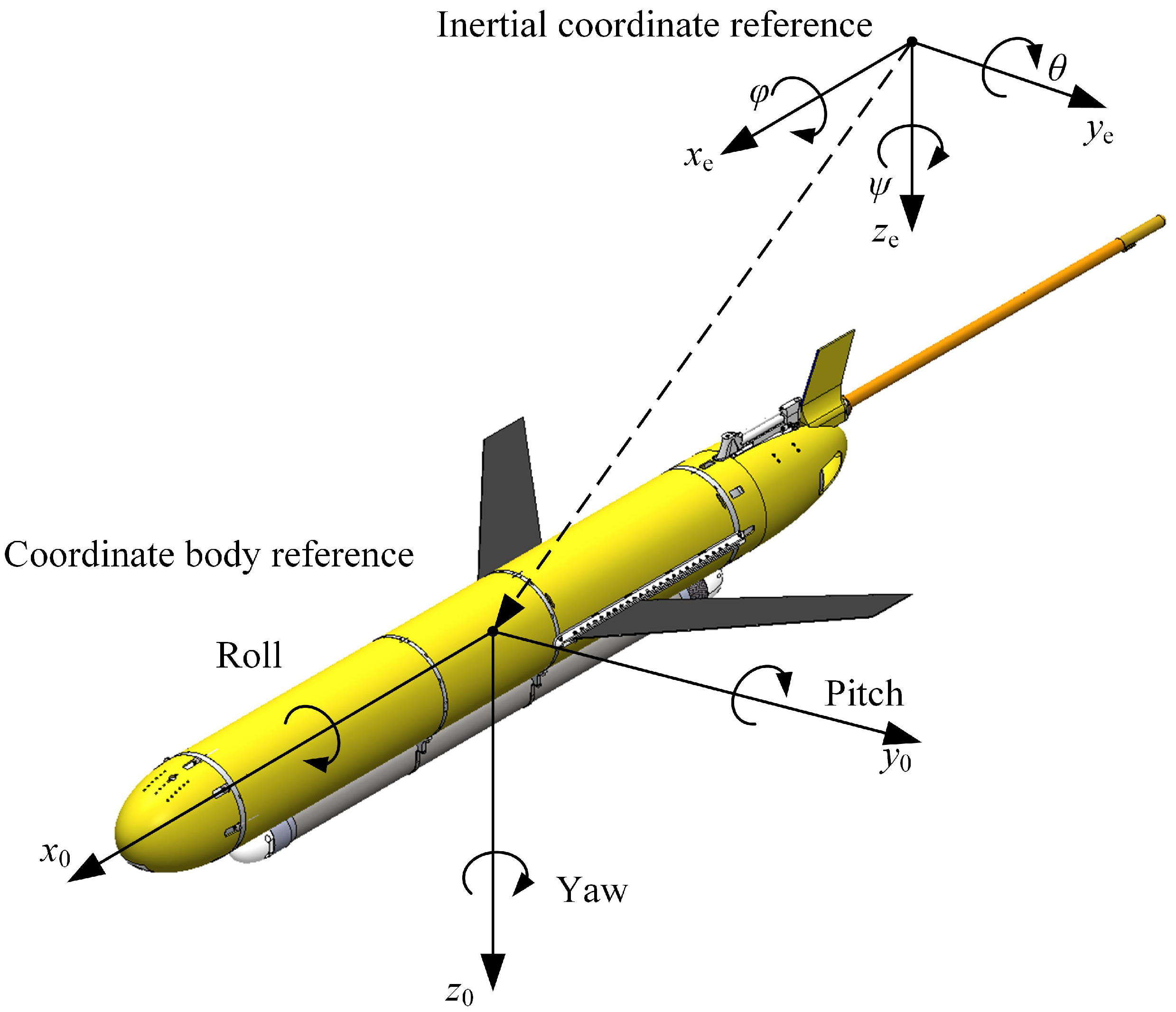
- Since the underwater vehicle is rarely adjusted in the roll and yaw directions. Therefore, only considering the motion of the underwater vehicle in the vertical plane;
- Pitching angle range from to .
3. Controller Design
3.1. Linearization of the Mathematical Model
3.2. Controller Design for Disturbances with Known Parameters
3.2.1. RS Controller Structure
3.2.2. Pole Assignment
3.2.3. Disturbance Suppression Controller Design
3.3. Controller Design for Disturbances with Unknown Parameters
- (1)
- Solve , by the pre-set poles , utilizing Equation (54).
- (2)
- Obtain by outputting ,applying control , via Equation (62).
- (3)
- Estimate the related perturbation parameters (i.e., the parameters of the polynomial ) with the parameter estimation Equation (64).
- (4)
- The control parameter can be obtained by solving the equation of the dropfan diagram by bringing obtained in the previous step into Equation (55).
- (5)
- Bring the and obtained from the first step and the obtained from the fourth step into Equations (51) and (52), and then the controller parameters can be solved.
4. Simulation Results and Discussion
5. Conclusions
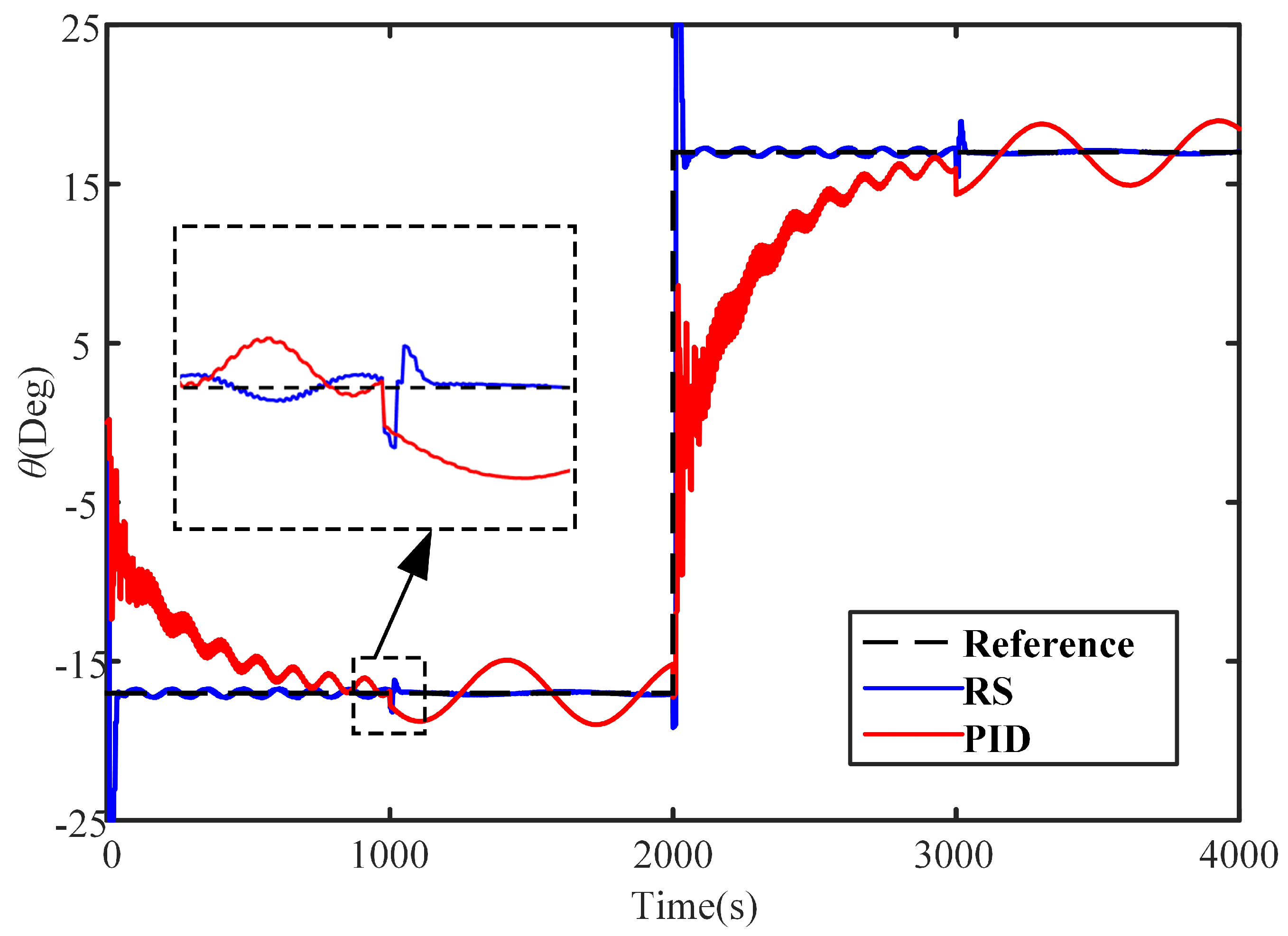
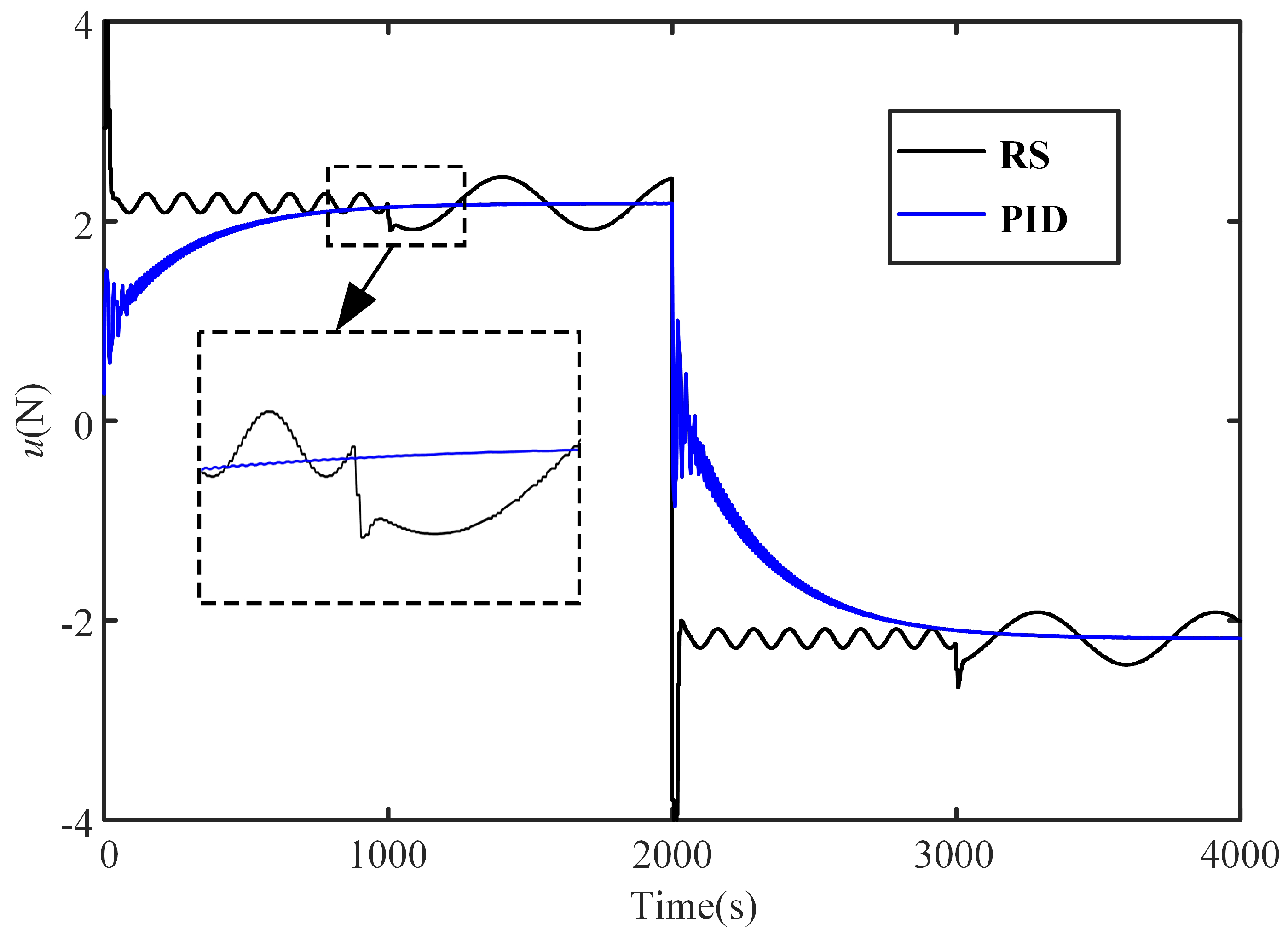
- For known parameters and bounded external disturbance, this controller could compensate the disturbance by pre-setting the control parameters using the internal model principle and parameterization method. The simulation results showed that this approach was particularly effective in low and medium frequency bands;
- In the case where the parameters of perturbation were unknown, in this paper, firstly, we used the parameter identification method to estimate the environmental disturbances. This approach could transform the disturbance with unknown parameters into a known one, which the type controller could then suppress. Simulation analysis with unknown parameters and time-varying wave signals as disturbances showed that the proposed strategy was effective.
- When the vehicle needs to reach a location quickly or when the trial area’s sea conditions are good, this controller will be turned off, and only the PID will be used to control the pitch angle;
- When the environmental disturbances (such as currents, waves, etc.) are significant, which significantly affects the vehicle’s observation in the focused region, this controller can be turned on to reduce the impact of environmental disturbances on it. The controller can be turned on to minimize the effect of environmental disturbances on the vehicle and make the vehicle sail more smoothly, thus achieving high accuracy observation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wakita, N.; Hirokawa, K.; Ichikawa, T.; Yamauchi, Y. Development of autonomous underwater vehicle (AUV) for exploring deep sea marine mineral resources. Mitsubishi Heavy Indu. Tech. Rev. 2010, 47, 73–80. [Google Scholar]
- Fernández-Perdomo, E.; Cabrera-Gámez, J.; Hernández-Sosa, D.; Isern-González, J.; Domínguez-Brito, A.C.; Redondo, A.; Coca, J.; Ramos, A.G.; Fanjul, E.Á.; García, M. Path planning for gliders using Regional Ocean Models: Application of Pinzón path planner with the ESEOAT model and the RU27 trans-Atlantic flight data. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–10. [Google Scholar]
- Fernández, D.C.; Hollinger, G.A. Model predictive control for underwater robots in ocean waves. IEEE Robot. Automat. Lett. 2017, 2, 88–95. [Google Scholar] [CrossRef]
- Wang, G.; Yang, Y.; Wang, S.; Zhang, H.; Wang, Y. Efficiency analysis and experimental validation of the ocean thermal energy conversion with phase change material for underwater vehicle. Appl. Energy 2019, 248, 475–488. [Google Scholar] [CrossRef]
- Wang, G.; Yang, Y.; Wang, S. Ocean thermal energy application technologies for unmanned underwater vehicles: A comprehensive review. Appl. Energy 2020, 278, 115752. [Google Scholar] [CrossRef]
- Singh, Y.; Bhattacharyya, S.; Idichandy, V. CFD approach to steady state analysis of an underwater glider. In Proceedings of the 2014 Oceans-St. John’s, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–5. [Google Scholar]
- Singh, Y.; Bhattacharyya, S.; Idichandy, V. CFD approach to modelling, hydrodynamic analysis and motion characteristics of a laboratory underwater glider with experimental results. J. Ocean Eng. Sci. 2017, 2, 90–119. [Google Scholar] [CrossRef]
- Yang, C.; Peng, S.; Fan, S.; Zhang, S.; Wang, P.; Chen, Y. Study on docking guidance algorithm for hybrid underwater glider in currents. Ocean Eng. 2016, 125, 170–181. [Google Scholar] [CrossRef]
- Sitaba, A.I.; Trilaksono, B.R.; Hidayat, E.M.I.; Sagala, M.F. Communication system and visualization of sensory data and HILs in autonomous underwater glider. In Proceedings of the 6th International Conference on Electrical Engineering and Informatics (ICEEI), Langkawi, Malaysia, 25–27 November 2017; pp. 1–6. [Google Scholar]
- Mina, T.; Singh, Y.; Min, B.C. Maneuvering Ability-Based Weighted Potential Field Framework for Multi-USV Navigation, Guidance, and Control. Mar. Technol. Soc. J. 2020, 54, 40–58. [Google Scholar] [CrossRef]
- Xue, D.Y.; Wu, Z.L.; Wang, Y.H.; Wang, S.X. Coordinate control, motion optimization and sea experiment of a fleet of Petrel-II gliders. Chin. J. Mech. Eng. 2018, 31, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Leonard, N.E.; Paley, D.A.; Lekien, F.; Sepulchre, R.; Fratantoni, D.M.; Davis, R.E. Collective motion, sensor networks, and ocean sampling. Proc. IEEE 2007, 95, 48–74. [Google Scholar] [CrossRef] [Green Version]
- Chocron, O.; Vega, E.; Benbouzid, M. Evolutionary dynamic reconfiguration of AUVs for underwater maintenance. In Marine Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2018; pp. 137–178. [Google Scholar]
- Webb, D.C.; Simonetti, P.J.; Jones, C.P. SLOCUM: An underwater glider propelled by environmental energy. IEEE J. Ocean. Eng. 2001, 26, 447–452. [Google Scholar] [CrossRef]
- Huang, Z.; Liu, Y.; Zheng, H.; Wang, S.; Ma, J.; Liu, Y. A self-searching optimal ADRC for the pitch angle control of an underwater thermal glider in the vertical plane motion. Ocean Eng. 2018, 159, 98–111. [Google Scholar] [CrossRef]
- Joe, H.; Kim, M.; Yu, S.C. Second-order sliding-mode controller for autonomous underwater vehicle in the presence of unknown disturbances. Nonlinear Dyn. 2014, 78, 183–196. [Google Scholar] [CrossRef]
- Mohan, S.; Kim, J. Indirect adaptive control of an autonomous underwater vehicle-manipulator system for underwater manipulation tasks. Ocean Eng. 2012, 54, 233–243. [Google Scholar] [CrossRef]
- Li, J.H.; Lee, P.M. Design of an adaptive nonlinear controller for depth control of an autonomous underwater vehicle. Ocean Eng. 2005, 32, 2165–2181. [Google Scholar] [CrossRef]
- Antonelli, G.; Caccavale, F.; Chiaverini, S.; Fusco, G. A novel adaptive control law for underwater vehicles. IEEE Trans. Control Syst. Technol. 2003, 11, 221–232. [Google Scholar] [CrossRef]
- Do, K.D.; Pan, J.; Jiang, Z.P. Robust and adaptive path following for underactuated autonomous underwater vehicles. Ocean Eng. 2004, 31, 1967–1997. [Google Scholar] [CrossRef]
- Wang, X.; Yao, X.; Zhang, L. Path Planning under Constraints and Path Following Control of Autonomous Underwater Vehicle with Dynamical Uncertainties and Wave Disturbances. J. Intell. Robot. Syst. 2020, 99, 1–18. [Google Scholar] [CrossRef]
- Dai, Y.; Yu, S.; Yan, Y.; Yu, X. An EKF-based fast tube MPC scheme for moving target tracking of a redundant underwater vehicle-manipulator system. IEEE/ASME Trans. Mechatron. 2019, 24, 2803–2814. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, X.; Luo, M.; Yang, C. MPC-based 3-D trajectory tracking for an autonomous underwater vehicle with constraints in complex ocean environments. Ocean Eng. 2019, 189, 106309. [Google Scholar] [CrossRef]
- Kim, W.; Kim, H.; Chung, C.C.; Tomizuka, M. Adaptive output regulation for the rejection of a periodic disturbance with an unknown frequency. IEEE Trans. Control Syst. Technol. 2011, 19, 1296–1304. [Google Scholar] [CrossRef]
- Basturk, H.I.; Krstic, M. State derivative feedback for adaptive cancellation of unmatched disturbances in unknown strict-feedback LTI systems. Automatica 2014, 50, 2539–2545. [Google Scholar] [CrossRef]
- Jafari, S.; Ioannou, P.A. Robust adaptive attenuation of unknown periodic disturbances in uncertain multi-input multi-output systems. Automatica 2016, 70, 32–42. [Google Scholar] [CrossRef]
- Tijani, I.B.; Budiyono, A. Control of an Unmmaned Underwater Vehicles using an Optimized LQR Method. Mar. Underw. Sci. Technol. ISIUS 2016, 1, 41–48. [Google Scholar]
- Ullah, B.; Ovinis, M.; Baharom, M.; Ali, S.; Javaid, M. Pitch and depth control of underwater glider using LQG and LQR via Kalman filter. Int. J. Veh. Struct. Syst. 2018, 10, 137–141. [Google Scholar] [CrossRef]
- Feng, Z.; Allen, R. Reduced order H∞ control of an autonomous underwater vehicle. Control Eng. Prac. 2004, 12, 1511–1520. [Google Scholar] [CrossRef]
- Vu, M.T.; Le, T.H.; Thanh, H.L.N.N.; Huynh, T.T.; Van, M.; Hoang, Q.D.; Do, T.D. Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors 2021, 21, 747. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Vu, M.T.; Mung, N.X.; Nguyen, N.P.; Phuong, N.T. Perturbation Observer-Based Robust Control Using a Multiple Sliding Surfaces for Nonlinear Systems with Influences of Matched and Unmatched Uncertainties. Mathematics 2020, 8, 1371. [Google Scholar] [CrossRef]
- Vu, M.T.; Le Thanh, H.N.N.; Huynh, T.T.; Thang, Q.; Duc, T.; Hoang, Q.D.; Le, T.H. Station-Keeping Control of a Hovering Over-Actuated Autonomous Underwater Vehicle Under Ocean Current Effects and Model Uncertainties in Horizontal Plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Cui, R.; Chen, L.; Yang, C.; Chen, M. Extended state observer-based integral sliding mode control for an underwater robot with unknown disturbances and uncertain nonlinearities. IEEE Trans. Ind. Electron. 2017, 64, 6785–6795. [Google Scholar] [CrossRef] [Green Version]
- Zhou, H.; Wei, Z.; Zeng, Z.; Yu, C.; Yao, B.; Lian, L. Adaptive robust sliding mode control of autonomous underwater glider with input constraints for persistent virtual mooring. Appl. Ocean Res. 2020, 95, 102027. [Google Scholar] [CrossRef]
- Wu, H.X.; Shen, S.P. Basis of theory and applications on PID control. Control Eng. China 2003, 10, 37–42. [Google Scholar]
- Paine, T.M.; Whitcomb, L.L. Adaptive Parameter Identification of Underactuated Unmanned Underwater Vehicles: A Preliminary Simulation Study. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–6. [Google Scholar]
- Martin, S.C.; Whitcomb, L.L. Nonlinear model-based tracking control of underwater vehicles with three degree-of-freedom fully coupled dynamical plant models: Theory and experimental evaluation. IEEE Trans. Control Syst. Technol. 2018, 26, 404–414. [Google Scholar] [CrossRef]
- Xiang, X.; Yu, C.; Zhang, Q. Robust fuzzy 3D path following for autonomous underwater vehicle subject to uncertainties. Comput. Operat. Res. 2017, 84, 165–177. [Google Scholar] [CrossRef]
- Landau, I.D.; Airimitoaie, T.B.; Castellanos-Silva, A.; Constantinescu, A. Robust Controller Design for Feedback Attenuation of Narrow-Band Disturbances. In Adaptive and Robust Active Vibration Control; Springer: Berlin/Heidelberg, Germany, 2017; pp. 213–224. [Google Scholar]
- Chen, Y.; Zhang, R.; Zhao, X.; Gao, J. Adaptive fuzzy inverse trajectory tracking control of underactuated underwater vehicle with uncertainties. Ocean Eng. 2016, 121, 123–133. [Google Scholar] [CrossRef]
- Chen, Y.; Yan, W.; Gao, J.; Du, L. Adaptive integral backstep-ping control for vertical pitch motion of underwater gliders. Acta Armamentarii 2011, 32, 981–985. [Google Scholar]
- Landau, I.D.; Constantinescu, A.; Rey, D. Adaptive narrow band disturbance rejection applied to an active suspension-an internal model principle approach. Automatica 2005, 41, 563–574. [Google Scholar] [CrossRef]
- Xia, Q.; Chen, Y.; Yang, C.; Chen, B.; Muhammad, G.; Ma, X. Maximum efficiency point tracking for an ocean thermal energy harvesting system. Int. J. Energy Res. 2020, 44, 2693–2703. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, Y.; Ma, Z.; Wang, S. A thermal engine for underwater glider driven by ocean thermal energy. Applied Thermal Engineering 2016, 99, 455–464. [Google Scholar] [CrossRef]
- Fossen, T. Marine Control Systems: Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002; Volume 28. [Google Scholar]
- Woolsey, C.; Leonard, N. Moving mass control for underwater vehicles. In Proceedings of the 2002 American Control Conference (IEEE Cat. No. CH37301), Anchorage, AK, USA, 8–10 May 2002; Volume 4, pp. 2824–2829. [Google Scholar]
- Smallwood, D.A.; Whitcomb, L.L. Model-based dynamic positioning of underwater robotic vehicles: Theory and experiment. IEEE J. Ocean. Eng. 2004, 29, 169–186. [Google Scholar] [CrossRef]
- Leonard, N.E.; Fiorelli, E. Virtual leaders, artificial potentials and coordinated control of groups. In Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No. 01CH37228), Orlando, FL, USA, 4–7 December 2001; Volume 3, pp. 2968–2973. [Google Scholar]
- Landau, I.D.; Zito, G. Digital Control Systems: Design, Identification and Implementation; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Landau, I.D.; Lozano, R.; M’Saad, M.; Karimi, A. Adaptive control: Algorithms, Analysis and Applications; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Anderson, E.W. Customer satisfaction and word of mouth. J. Serv. Res. 1998, 1, 5–17. [Google Scholar] [CrossRef]
- Landau, I.D.; Constantinescu, A.; Alma, M. Adaptive regulation-Rejection of unknown multiple narrow band disturbances. In Proceedings of the 2009 17th Mediterranean Conference on Control and Automation, Thessaloniki, Greece, 24–26 June 2009; pp. 1056–1065. [Google Scholar]
- Paleologu, C.; Benesty, J.; Ciochina, S. A robust variable forgetting factor recursive least-squares algorithm for system identification. IEEE Signal Process. Lett. 2008, 15, 597–600. [Google Scholar] [CrossRef]
- Wu, H.; Niu, W.; Wang, S.; Yan, S. An analysis method and a compensation strategy of motion accuracy for underwater glider considering uncertain current. Ocean Eng. 2021, 226, 108877. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 12 kg·m2 | 5 kg | ||
| r | 0.05 m | 0.26 m × s | |
| 40 kg | 70 kg | ||
| ±0.08 m × s | |||
| kg | 61.92 kg |
| Frequency | RS | PID | ||
|---|---|---|---|---|
| (s) | (Deg) | (s) | (Deg) | |
| 0.01 Hz | 56 | 0.06 | 1115 | 0.76 |
| 0.05 Hz | 55 | 0.53 | 783 | 0.93 |
| 0.10 Hz | 42 | 2.26 | 645 | 1.14 |
| 1.00 Hz | 40 | 3.45 | 930 | 1.07 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Yang, Y.; Wang, S. Adaptive Digital Disturbance Rejection Controller Design for Underwater Thermal Vehicles. J. Mar. Sci. Eng. 2021, 9, 406. https://doi.org/10.3390/jmse9040406
Wang G, Yang Y, Wang S. Adaptive Digital Disturbance Rejection Controller Design for Underwater Thermal Vehicles. Journal of Marine Science and Engineering. 2021; 9(4):406. https://doi.org/10.3390/jmse9040406
Chicago/Turabian StyleWang, Guohui, Yanan Yang, and Shuxin Wang. 2021. "Adaptive Digital Disturbance Rejection Controller Design for Underwater Thermal Vehicles" Journal of Marine Science and Engineering 9, no. 4: 406. https://doi.org/10.3390/jmse9040406
APA StyleWang, G., Yang, Y., & Wang, S. (2021). Adaptive Digital Disturbance Rejection Controller Design for Underwater Thermal Vehicles. Journal of Marine Science and Engineering, 9(4), 406. https://doi.org/10.3390/jmse9040406