
A Review and Meta-Analysis of Underwater Noise Radiated by Small (<25 m Length) Vessels



Abstract
:1. Introduction
2. Definitions and Scope
- Radiated noise levels (abbreviation: RNL; symbol: LRN), defined as the level of the product of the distance d from a ship reference point of a sound source and the far-field root mean-square sound pressure prms at that distance for a specified reference value. The RNL is computed as:
- 2.
- Monopole source levels (abbreviation: MSL; symbol: LSL), defined as the mean-square sound pressure level at a distance of 1 m from a hypothetical monopole source, placed in a hypothetical infinite lossless medium. The MSL is determined by adding the propagation loss NPL to the mean-square sound pressure level Lp2 measured at some range d:
- The propagation loss NPL is determined through modelling (e.g., a parabolic equation model), accounting for the effects of the local environment at the time.
- 3.
- Environment-affected source levels (abbreviation: ASL; symbol: LASL), defined as the mean-square sound pressure level at a distance of 1 m in a natural environment (i.e., with existing surface boundaries) and thus affected by the local environment at the time. The ASL is determined by linear regression of the mean-square sound pressure level measured at a series of ranges.
3. Objectives
- Identify studies that provide broadband source level estimates for individual small vessels, together with appropriate vessel specifications, operations and environmental data.
- Access supplementary data from these studies (i.e., additional recordings of vessels that were available but not included in the publication, but meet the same standards of quality as those reported).
- Collate data from (1) and (2) to identify potentially influential common factors that were reported alongside the estimated source levels and produce a dataset from which a statistical model can be developed to identify their contribution to variance in those estimates. This is not a model to predict noise from small vessels, but to tease out the drivers of variation in the available reported data.
- Compare and characterise the inter-study variability in methodologies and reported source levels.
- Review and describe the various factors that are known to contribute to variations in the vessel spectra and estimated source levels and, where data are available, quantify their contribution to the variance.
4. Materials and Methods
- Conducted a literature review using Google Scholar and Scopus to search for papers that included “vessel” or “boat” AND “source level” OR “sound signature” OR “acoustic signature” OR “noise signature” OR “radiated noise” in the title or keywords;
- Assessed citations found within these publications to see if they met the required criteria for inclusion in the dataset (described below) even though they were missed in the original search;
- Included data from publications that provided a broadband source level estimate in the dataset;
- Only included reported values of individual vessel passes and not aggregated assessments of the source levels in the dataset for statistical modelling;
- Examined previous reports authored by the investigators of this study that met the criteria below for additional recordings that were not included in the original publication, but were collected under the same standard and protocols as those in the publication. Available data were added to the overall dataset.
- Vessel Type, Length and Hull Type displayed collinearity. Source level displayed a relationship with speed that appeared to vary with vessel type. Further, hull type was reduced to two levels after accounting for missing values. As a result, vessel type was chosen over length and hull type.
- Water Depth and Hydrophone Depth were highly collinear. Water Depth provided a greater range of values to describe variation than Hydrophone Depth. Additionally, the Closest Point of Approach (CPA) was often significantly large with respect to the Hydrophone Depth, and therefore provided a variable that describes the impact of the largest interference pattern, the Lloyd’s mirror effect, on source level that could otherwise be explained by hydrophone depth. Therefore, Water Depth was retained for the model and Hydrophone Depth was discarded.
- Propagation Model showed collinearity with Vessel Type, Water Depth and Engine Power and was not included in the model.
- Engine Power and/or CPA was not reported for 226 data points, which were excluded, removing all data from the Military and Cargo Vessel Types.
- Fishing and Tug Vessel Types only contained 16 and 8 measurements, respectively, that had data on Engine Power, whereas Landing Craft originally only included 8 data points, thus these Vessel Types were not included in the model.
- Data exploration showed that the Vessel Speed and CPA data collected for Electric and Sailing vessels were skewed (e.g., only one electric vessel, recorded multiple times at one speed and one CPA). Therefore, these two levels, with <23 data points each, did not contain enough information to produce sensible smoothers and were not included in the model.
- Several studies reported only one or two measurements for individual vessels (e.g., Veirs and Veirs [3]) and had to be removed.
- In the remaining datasets, a total of 64 data points were present for vessels that were recorded less than three times and were not included in the final dataset.
- Additionally, four CPA outliers, which appeared to be influential data points, were also removed, two from Monohulls and two from RHIB vessel types.
4.1. Model Validation
4.2. Within Study Assessments
4.2.1. Applied Frequency Band
4.2.2. Propagation Model and Equipment Configuration
5. Results
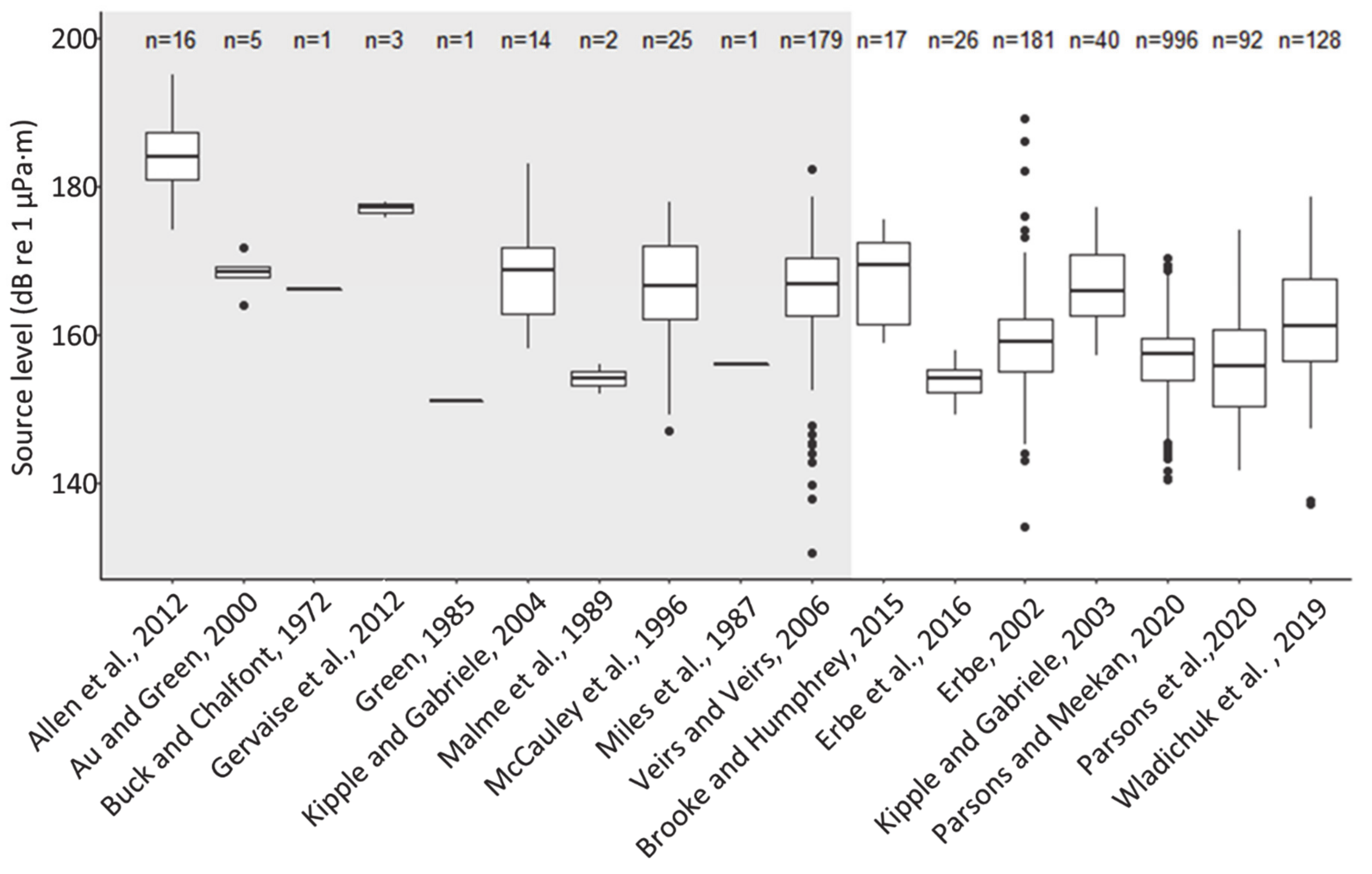
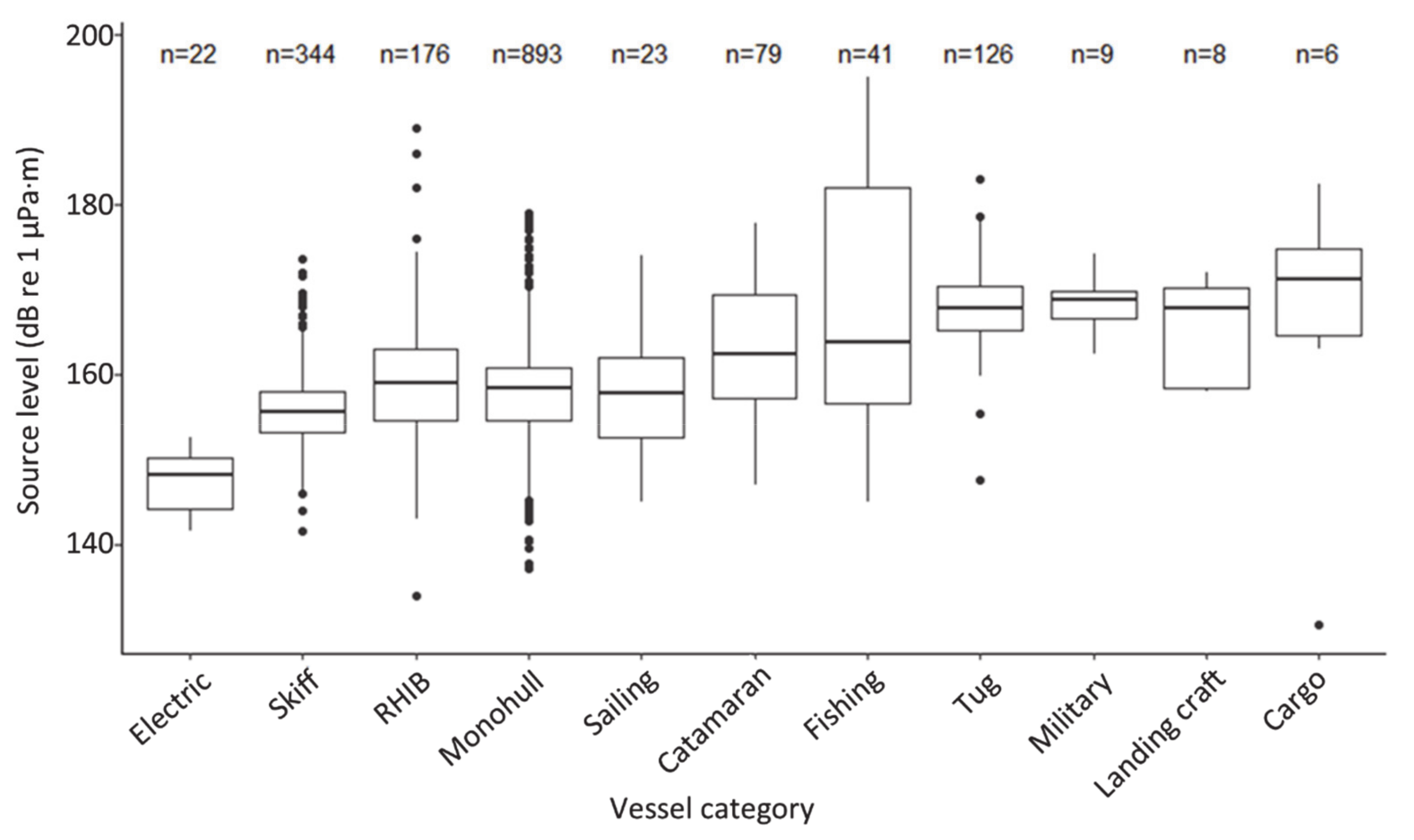
5.1. Characterisation of Estimates from Selected Studies
Model
5.2. Within Study Assessments
5.2.1. Frequency Band
5.2.2. Propagation Model
5.2.3. Hydrophone Depth
6. Discussion: Variation in Small Vessel Source Levels
6.1. Research Objective
6.2. Factors That Drive Acoustic Output and Estimated Source Levels within Vessel Types
6.2.1. Intrinsic Factors
Speed
Size and Weight
Propeller Specifications
Engine Power and Type
Onboard Machinery
Directionality
6.2.2. Extrinsic Factors
Closest Point of Approach
- The vessel types that produced higher source levels were generally recorded at a greater range than the quieter vessel types.
- The small vessel recordings were predominantly taken at shorter ranges than in the Chion et al. [19] study. Therefore, inaccurate propagation models would have less distance to impact the source level estimates.
- For a near-surface source, the slant angle to the receiver affects the received level (due to the Lloyd’s mirror effect), and received levels decrease with decreasing hydrophone depth (i.e., when the hydrophone is closer to the sea surface and the slant angle is smaller). Gassman et al. [75] provided an example where source level estimates (0.02–1 kHz band) made using spreading laws for an angle to the hydrophone of 0.2° were 5–10 dB lower than those made at a 10° angle. This was reduced to 3–7 dB by applying a surface reflection correction, but not removed entirely [19]. The CPA and hydrophone depths applied in the small vessel studies analysed here were such that ≈85% of recordings were made at >8° and ≈77% at >10°.
Propagation Loss Model Used in Analysis
Frequency Band
Hydrophone Depth
System Response
Environmental Conditions
Environmental Impacts
7. Conclusions
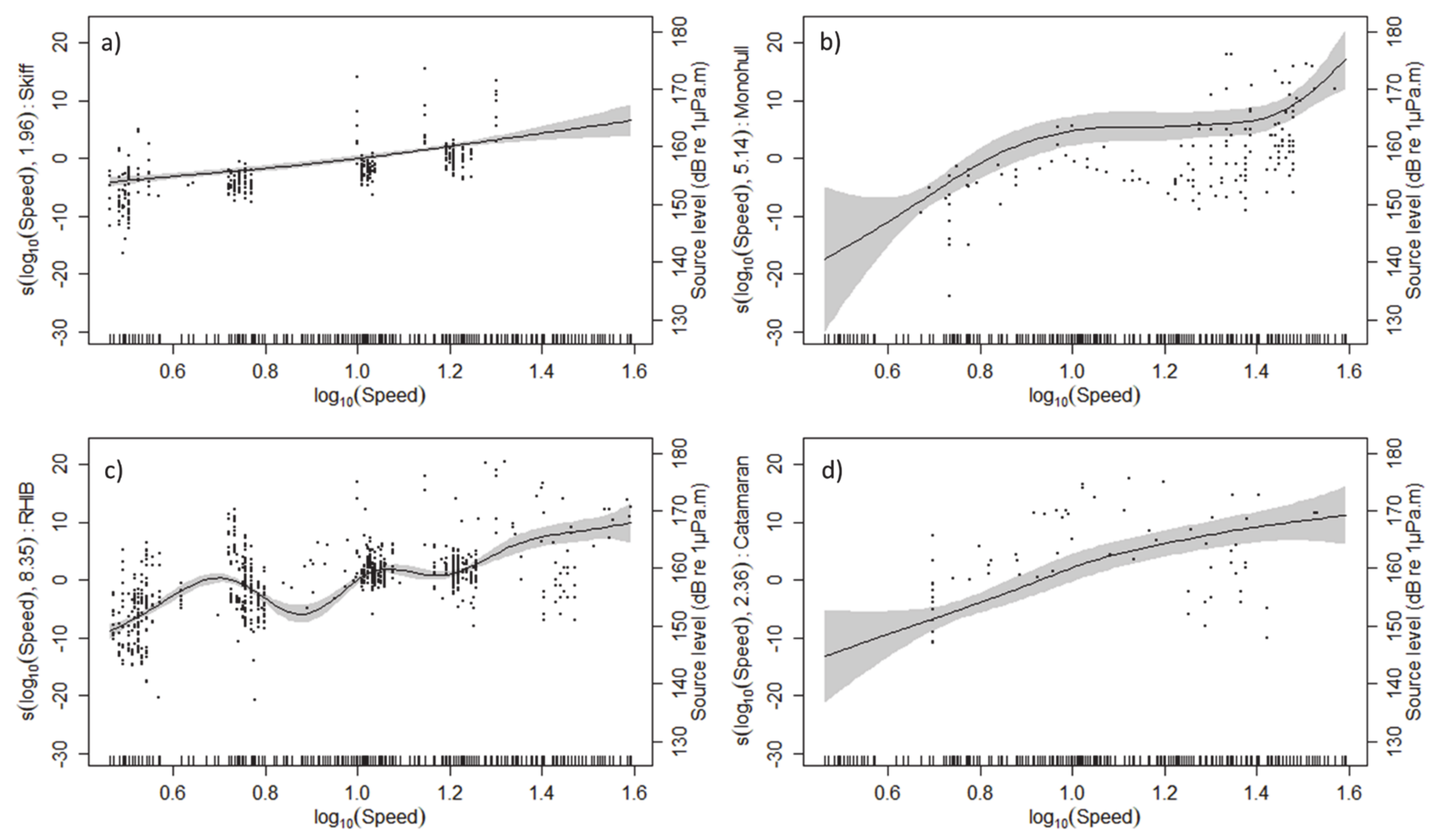
- There is little available published data on small (<25 length) vessels’ source levels. Our dataset revealed a high level of variation among studies, vessel designs and within vessel types (up to 20 dB difference, even for the same vessel at the same speed). The lowest estimated source levels were emitted by electric vessels and these levels broadly increased as vessel designs moved from planing to displacement hulls. Our analysis revealed a significant positive relationship between small vessel speed-over-ground and estimated source level, generalised as speed coefficient Cv values of 8 to 16, among the four vessel types tested. These support the consensus that regulating speed is a viable method of reducing instantaneous noise levels and their potential impact on marine fauna, with consideration for the additional exposure time from slower travel.
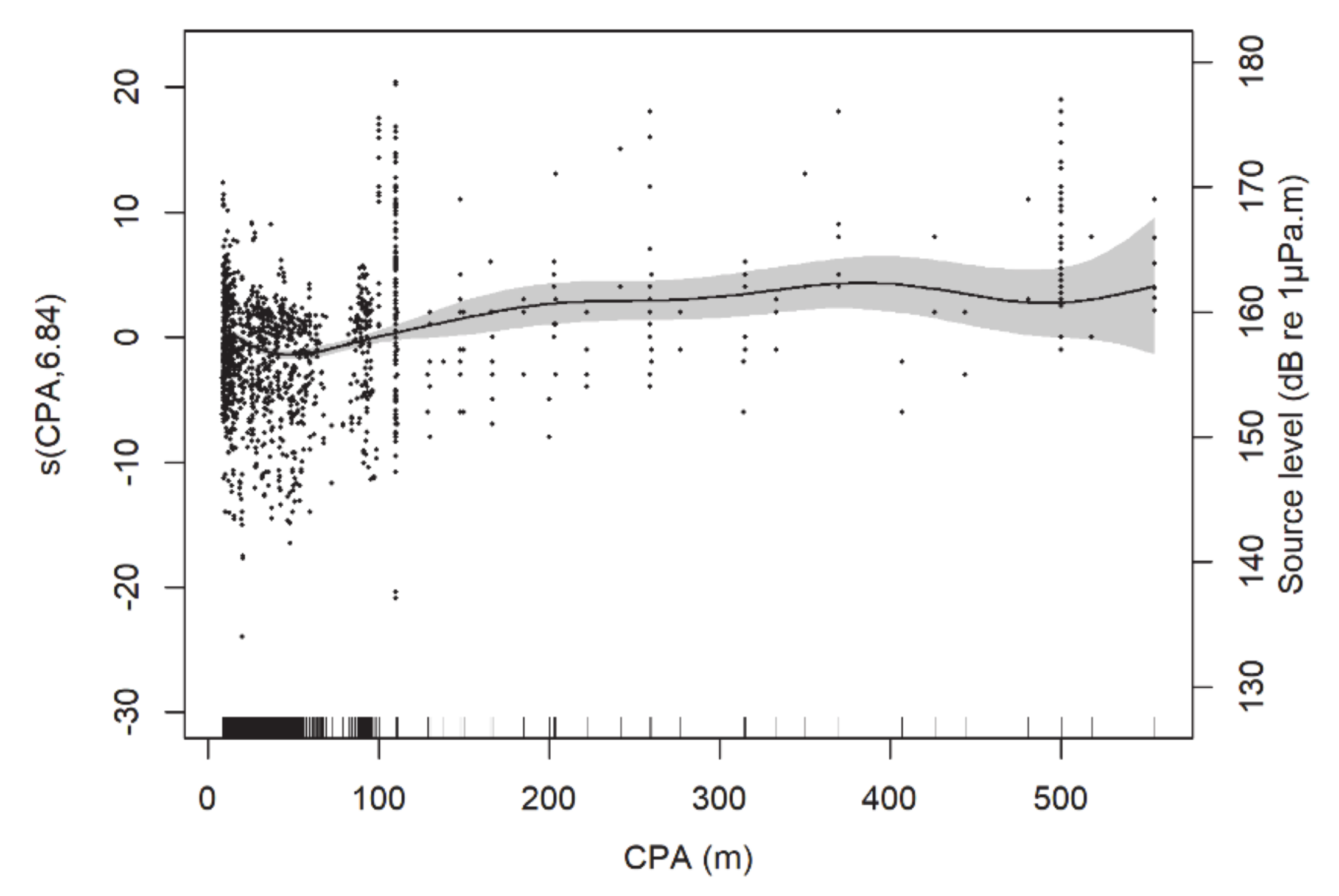
- We have shown that data acquisition and analysis protocols for opportunistic estimates of vessel source level contribute to variability between studies. This was confirmed by the inclusion of CPA as a statistically significant explanatory variable in the final GAMM, and by the demonstrated difference in estimates caused by changing the lower frequency of the analysed bandwidth and the difference in low frequency energy observed between MSL and RNL and between ASL and RNL estimates.
- Few studies provide enough measures to assess confidence limits in the estimates, enough supplementary information in intrinsic and extrinsic factors associated with the recordings to create a dataset of a size needed to tease out the significant drivers of acoustic characteristics, or a breakdown of the vessel source spectra to assess how the signal would be perceived by different marine taxa.
- Vessels emit significant low-frequency acoustic energy. For small vessels, this is particularly true at slow speeds. Studies that omit low-frequency energy (e.g., report a broadband level that starts at 50 or 100 Hz) may underestimate source level. Similarly, estimates of source spectra using geometrical spreading or propagation models that do not accurately reflect seabed geophysical characteristics may also underestimate low-frequency energy. Inadequately calibrated recording systems have also been shown to underestimate low-frequency received levels. The effect these factors have on the estimated broadband source level are dependent on the vessel source spectra and therefore, errors are vessel-, speed- and system-specific and may be synergistic. Any management protocols developed using such estimated source levels would be applicable to species with good low-frequency (<100 Hz) hearing sensitivity. These are typically fish and invertebrates, many of which are the sessile, site-attached or low-mobility animals that are most likely to experience noise from vessels at short range when vessels pass near or directly above fauna in shallow coastal waters. Any regulations designed to mitigate the impact of noise on these animals therefore need accurate estimates of low-frequency source levels.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Nomenclature
| Abbreviation | Symbol | Full Name |
| AIC | Akaike’s information criterion | |
| ASL | LASL | Affected source level |
| CPA | Closest Point of Approach | |
| GAM | Generalised additive model | |
| GAMM | Generalised additive mixed model | |
| ISO | International Standards Organisation | |
| RHIB | Rigid hull inflatable boat | |
| RNL | LRN | Radiated noise level |
| MSL | LSL | Monopole source level |
| s.d. | Standard deviation | |
| SL | Source level | |
| VIF | Variance inflation factors | |
| Cv | Velocity coefficient | |
| d | Depth | |
| Lp | Sound pressure level | |
| prms | Root mean-square sound pressure | |
| NPL | Propagation loss | |
| SLivr | Estimated source level reported for observation i, for vessel v and reported by reference r | |
| v | Vessel velocity | |
| vr | Reference velocity | |
| σ2 | variance |
References
- Duarte, C.M.; Chapuis, L.; Collin, S.P.; Costa, D.P.; Devassy, R.P.; Eguiluz, V.M.; Erbe, C.; Gordon, T.A.C.; Halpern, B.S.; Harding, H.R.; et al. The Ocean Soundscape of the Anthropocene. Science 2021, 371, 581. [Google Scholar] [CrossRef]
- Mooney, T.A.; Di Iorio, L.; Lammers, M.; Lin, T.H.; Nedelec, S.L.; Parsons, M.J.G.; Radford, C.A.; Urban, E.; Stanley, J. Listening forward: Approaching marine biodiversity assessments using acoustic methods. R. Soc. Open Sci. 2020, 7, 201287. [Google Scholar] [CrossRef] [PubMed]
- Veirs, S.; Veirs, V. Vessel noise measurements underwater in the Haro Strait, WA. J. Acoust. Soc. Am. 2006, 120, 3382. [Google Scholar] [CrossRef]
- Frisk, G. Noiseonomics: The relationship between ambient noise levels in the sea and global economic trends. Sci. Rep. 2012, 2, 437. [Google Scholar] [CrossRef] [Green Version]
- Hatch, L.; Clark, C.W.; Merrick, R.; Van Parijs, S.M.; Ponirakis, D.; Schwehr, K.; Thompson, M.; Wiley, D. Characterizing the relative contributions of large vessels to total ocean noise fields: A case study using the Gerry E. Studds Stellwagen Bank National Marine Sanctuary. Environ. Man. 2008, 42, 735–752. [Google Scholar]
- Stanley, J.A.; Van Parijs, S.M.; Hatch, L.T. Underwater sound from vessel traffic reduces the effective communication range in Atlantic cod and haddock. Sci. Rep. 2017, 7, 14633. [Google Scholar] [CrossRef] [Green Version]
- Blane, J.; Jaakson, R. The impact of ecotourism boats on the St. Lawrence beluga whales. Environ. Cons. 1994, 21, 267–269. [Google Scholar] [CrossRef]
- Graham, A.L.; Cooke, S.J. The effects of noise disturbance from various recreational boating activities common to inland waters on the cardiac physiology of a freshwater fish, the largemouth bass (Micropterus salmoides). Aquat. Cons. Mar. Fresh. Ecosyst. 2008, 18, 1315–1324. [Google Scholar] [CrossRef]
- Williams, R.; Wright, A.J.; Ashe, E.; Blight, L.K.; Bruintjes, R.; Canessa, R.; Clark, C.W.; Cullis-Suzuki, S.; Dakin, D.T.; Erbe, C.; et al. Impacts of anthropogenic noise on marine life: Publication patterns, new discoveries, and future directions in research and management. Ocean Coast. Man. 2015, 115, 17–24. [Google Scholar] [CrossRef] [Green Version]
- Erbe, C.; Reichmuth, C.; Cunningham, K.; Lucke, K.; Dooling, R. Communication masking in marine mammals: A review and research strategy. Mar. Pollut. Bull. 2016, 103, 15–38. [Google Scholar] [CrossRef]
- Erbe, C.; Marley, S.; Schoeman, R.; Smith, J.N.; Trigg, L.; Embling, C.B. The effects of ship noise on marine mammals—A review. Front. Mar. Sci. 2019, 6, 606. [Google Scholar] [CrossRef] [Green Version]
- Southall, B.L.; Finneran, J.J.; Recihmuth, C.; Nachtigall, P.E.; Ketten, D.R.; Bowles, A.E.; Ellison, W.T.; Nowacek, D.P.; Tyack, P.L. Marine Mammal noise exposure criteria: Updated scientific recommendations for residual hearing effects. Aquat. Mam. 2019, 45, 125–232. [Google Scholar] [CrossRef]
- Nedelec, S.L.; Radford, A.N.; Pearl, L.; Nedelec, B.; McCormick, M.I.; Meekan, M.G.; Simpson, S.D. Motorboat noise impacts parental behaviour and offspring survival in a reef fish. Proc. R. Soc. B 2017, 284, 20170143. [Google Scholar] [CrossRef] [Green Version]
- Nedelec, S.L.; Mills, S.C.; Lecchini, D.; Nedelec, B.; Simpson, S.D.; Radford, A.N. Repeated exposure to noise increases tolerance in a coral reef fish. Environ. Pollut. 2016, 216, 428–436. [Google Scholar] [CrossRef]
- Nedelec, S.L.; Mills, S.C.; Radford, A.N.; Belade, R.; Simpson, S.D.; Nedelec, B.; Côté, I.M. Motorboat noise disrupts co-operative interspecific interactions. Sci. Rep. 2017, 7, 6987. [Google Scholar] [CrossRef]
- Harding, H.R.; Gordon, T.A.C.; Havlik, M.N.; Predragovic, M.; Devassy, R.P.; Radford, A.N.; Simpson, S.D.; Duarte, C.M. A systematic literature assessment on the effects of human-altered soundscapes on marine life [Dataset]. Zenodo 2020. [Google Scholar] [CrossRef]
- Mensinger, A.F.; Putland, R.L.; Radford, C.A. The effect of motorboat sound on Australian snapper Pagrus auratus inside and outside a marine reserve. Ecol. Evol. 2018, 8, 6438–6448. [Google Scholar] [CrossRef] [PubMed]
- Carlton, J.S. 10 Propeller noise. In Marine Propellers and Propulsion, 2nd ed.; Carlton, J.S., Ed.; Butterworth Heinemann: Oxford, UK, 1994; 584p. [Google Scholar]
- Chion, C.; Lagrois, D.; Dupras, J. A meta-analysis to understand the variability in reported source levels of noise radiated by ships from opportunistic studies. Front. Mar. Sci. 2019, 6, 714. [Google Scholar] [CrossRef] [Green Version]
- MacGillivray, A.O.; Li, Z.; Hannay, D.E.; Trounce, K.B.; Robinson, O.M. Slowing deep-sea commercial vessels reduces underwater radiated noise. J. Acoust. Soc. Am. 2019, 146, 340–351. [Google Scholar] [CrossRef] [Green Version]
- McKenna, M.F.; Wiggins, S.M.; Hildebrand, J.A. Relationship between container ship underwater noise levels and ship design, operational and oceanographic conditions. Sci. Rep. 2013, 3, 1760. [Google Scholar] [CrossRef] [Green Version]
- Ross, D. Mechanics of Underwater Noise; Pergamon Press: New York, NY, USA, 1976. [Google Scholar]
- Simpson, S.; Radford, A.; Nedelec, S.; Ferrari, M.C.O.; Chivers, D.P.; McCormick, M.I.; Meekan, M.G. Anthropogenic noise increases fish mortality by predation. Nat. Comm. 2016, 7, 10544. [Google Scholar] [CrossRef] [Green Version]
- Simpson, S.D.; Radford, A.N.; Holles, S.; Ferarri, M.C.O.; Chivers, D.P.; McCormick, M.I.; Meekan, M.G. Small-Boat Noise Impacts Natural Settlement Behavior of Coral Reef Fish Larvae. In The Effects of Noise on Aquatic Life II. Advances in Experimental Medicine and Biology; Popper, A., Hawkins, A., Eds.; Springer: New York, NY, USA, 2016; Volume 875, pp. 1041–1048. [Google Scholar]
- Erbe, C. Underwater noise of small personal watercraft (jet skis). J. Acoust. Soc. Am. 2013, 133, EL326–EL330. [Google Scholar] [CrossRef] [Green Version]
- Erbe, C.; Parsons, M.J.G.; Duncan, A.J.; Allen, K. Underwater acoustic signatures of recreational swimmers, divers, surfers and kayakers. Acoust. Aust. 2016, 44, 333–341. [Google Scholar] [CrossRef] [Green Version]
- Erbe, C.; Parsons, M.J.G.; Duncan, A.J.; Osterrieder, S.K.; Allen, K. Aerial and underwater sound of unmanned aerial vehicles (UAV). J. Unman. Veh. Sys. 2017, 5, 92–101. [Google Scholar] [CrossRef]
- Erbe, C.; Williams, R.; Parsons, M.J.G.; Parsons, S.K.; Hendrawan, I.G.; Dewantama, D. Underwater noise from airplanes: An overlooked source of ocean noise. Mar. Pollut. Bull. 2018, 137, 656–661. [Google Scholar] [CrossRef]
- McLean, D.L.; Parsons, M.J.G.; Gates, A.R.; Benfield, M.C.; Bond, T.; Booth, D.J.; Bunce, M.; Fowler, A.M.; Harvey, E.S.; Macreadie, P.I.; et al. Enhancing the Scientific Value of Industry Remotely Operated Vehicles (ROVs) in Our Oceans. Front. Mar. Sci. 2020, 7, 02200. [Google Scholar] [CrossRef] [Green Version]
- Marley, S.A.; Erbe, C.; Salgado-Kent, C.P.; Parsons, M.J.G.; Parnum, I.M. Spatial and Temporal Variation in the Acoustic Habitat of Bottlenose Dolphins (Tursiops aduncus) within a Highly Urbanized Estuary. Front. Mar. Sci. 2017, 4, 197. [Google Scholar] [CrossRef] [Green Version]
- Parsons, M.J.G.; Meekan, M.G. Acoustic Characteristics of Small Research Vessels. J. Mar. Sc. Eng. 2020, 8, 970. [Google Scholar] [CrossRef]
- International Organization for Standardization. Underwater Acoustics—Quantities and Procedures for Description and Measurement of Underwater Sound from Ships—Part 1: Requirements for Precision Measurements in Deep Water Used for Comparison Purposes (ISO 17208-1); International Organization for Standardization: Geneva, Switzerland, 2016; 20p. [Google Scholar]
- International Organization for Standardization. Underwater Acoustics—Quantities and Procedures for Description and Measurement of Underwater Sound from Ships—Part 2: Determination of Source Levels from Deep Water Measurements (ISO 17208-2); International Organization for Standardization: Geneva, Switzerland, 2019; 13p. [Google Scholar]
- McCauley, R.D.; Cato, D.H.; Jeffrey, A.F. A Study of Impacts of the Impacts of Vessel Noise on Humpback Whales in Hervey Bay; Report to the Queensland Department of Environment and Heritage, Maryborough Branch; Queensland Department of Environment and Heritage: Maryborough, QSL, Australia, 1996; 163p. [Google Scholar]
- Zuur, A.F.; Ieno, E.N.; Smith, G.M. Analysing Ecological Data; Springer: New York, NY, USA, 2007; 672p. [Google Scholar]
- Erbe, C. Underwater noise of whale-watching boats and potential effects on killer whales (Orcinus orca), based on an acoustic impact model. Mar. Mamm. Sci. 2002, 18, 394–418. [Google Scholar] [CrossRef]
- Zuur, A.F.; leno, E.N.; Walker, N.J.; Saveliev, A.A.; Smith, G.M. Mixed Effects Models and Extensions in Ecology with R; Springer: New York, NY, USA, 2009; 574p. [Google Scholar]
- Erbe, C.; Liong, S.; Koessler, M.W.; Duncan, A.J.; and Gourlay, T. Underwater sound of rigid-hulled inflatable boats. J. Acoust. Soc. Am. 2016, 139, EL223–EL227. [Google Scholar] [CrossRef] [Green Version]
- Gloza, I. Identification methods of underwater noise sources generated by small ships. Acoust. Biomed. Engin. 2011, 119, 961–965. [Google Scholar] [CrossRef]
- Malinowski, S.J.; Gloza, I. Underwater noise characteristics of small ships. Acta Acust. United Acust. 2002, 88, 718–721. [Google Scholar]
- Urick, R.J. Principles of Underwater Sound, 3rd ed.; McGraw Hill: New York, NY, USA, 1983. [Google Scholar]
- McCauley, R.D.; Thomas, F.; Parsons, M.J.G.; Erbe, C.; Cato, D.H.; Duncan, A.J.; Gavrilov, A.N.; Parnum, I.M.; Salgado-Kent, C.M. Developing an Underwater Sound Recorder: The Long and Short (Time) of It. Acoust. Aust. 2017, 45, 301–311. [Google Scholar] [CrossRef]
- McKenna, M.F.; Ross, D.; Wiggins, S.M.; Hildebrand, J.A. Underwater radiated noise from modern commercial ships. J. Acoust. Soc. Am. 2012, 131, 92–103. [Google Scholar] [CrossRef] [Green Version]
- Harrell, F.E., Jr. Regression Modeling Strategies; Springer: New York, NY, USA, 2001; 582p. [Google Scholar]
- Wood, S.; Scheipl, F. gamm4: Generalized Additive Mixed Models Using ‘mgcv’ and ‘lme4’. R Package Version 0.2-6. 2020. Available online: https://CRAN.R-project.org/package=gamm4 (accessed on 24 May 2021).
- Flom, P.L.; Cassell, D.L. Stopping stepwise: Why stepwise and similar selection methods are bad, and what you should use. In Proceedings of the NorthEast SAS Users Group 20th Annual Conference, Baltimore, MD, USA, 11–14 November 2007. [Google Scholar]
- Zuur, A.F.; Saveliev, A.A.; Ieno, E.N. A Beginner’s Guide to Additive Mixed Models with R; Highland Statistics Ltd.: Newburgh, UK, 2014. [Google Scholar]
- Burnham, K.P.; Anderson, D.R. Model Selection and Multimodel Inference: A Practical Information-Theoretic Approach; Springer: New York, NY, USA, 2002. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2020; Available online: https://www.R-project.org/ (accessed on 24 May 2021).
- Wladichuk, J.L.; Hannay, D.E.; MacGillivray, A.O.; Li, Z.; Thornton, S.J. Systematic source level measurements of whale watching vessels and other small boats. J. Ocean. Technol. 2019, 14, 110–126. [Google Scholar]
- Wladichuk, J.L.; Hannay, D.E.; MacGillivray, A.O.; Li, Z. Whale Watch and Small Vessel Underwater Noise Measurement Study: Final Report; Document 01522, V. 3.0. Technical Report by JASCO Applied Sciences for Vancouver FraserPort Authority ECHO Program; JASCO Applied Sciences (Canada) Ltd.: Victoria, BC, Canada, 2019; 110p. [Google Scholar]
- Parsons, M.J.G.; Duncan, A.J.; Parsons, S.K.; Erbe, C. Reducing vessel noise: An example of a solar-electric passenger ferry. J. Acoust. Soc. Am. 2020, 147, 3575–3583. [Google Scholar] [CrossRef]
- Richardson, W.J.; Green, C.R.; Malme, C.I.; Thomson, D.H. Marine Mammals and Noise; Academic Press: New York, NY, USA, 1995; 294p. [Google Scholar]
- Buck, B.M.; Chalfant, D.A. Deep Water Narrowband Radiated Noise Measurement of Merchant Ships; Delco TR72-28. Rep. from Delco Electronics; Delco Electronics: Dayton, OH, USA, 1972. [Google Scholar]
- Miles, P.R.; Malme, C.I.; Richardson, W.J. Prediction of Drilling Sit Specific Interaction of Industrial Acoustic Stimuli and Endangered Whales in the Alaskan Beaufort Sea; BBN Rep. 6509; OCS Study MMS 87-0084; BBN Labs Inc.: Cambridge, MA, USA; LGL Ltd.: King City, ON, Canada; U.S. Minerals Manage. Serv.: Anchorage, AK, USA, 1987; 341p. [Google Scholar]
- Malme, C.I.; Miles, P.R.; Miller, G.W.; Richardson, W.J.; Roseneau, D.G.; Thomson, D.H.; Greene, C.R., Jr. Analysis and Ranking of the Acoustic Disturbance Potential of Petroleum Industry Activities and Other Sources of Noise in the Environment of Marine Mammals in Alaska; BBN Rep. 6945; OCS Study MMS 89-0006. Rep; BBN Systems & Technol. Corp.: Cambridge, MA, USA; U.S. Minerals Manage. Serv.: Anchorage, AK, USA, 1989. [Google Scholar]
- Greene, C.R. Characteristics of waterborne industrial noise, 1980–84. In Behavior, Disturbance Responses and Distribution of Bowhead Whales Balaena mysticetus in the Eastern Beaufort Sea, 1980–84; OCS Study MMS 85-0034. Rep; Rjchardson, W.J., Ed.; LGL Ecol. Res. Assoc. Inc.: Bryan, TX, USA; U.S. Minerals Manage. Serv.: Reston, VA, USA, 1985; pp. 197–253. 306p. [Google Scholar]
- Allen, J.K.; Peterson, M.L.; Sharrad, G.V.; Wright, D.L.; Todd, S.K. Radiated noise from commercial ships in the Gulf of Maine: Implications for whale/vessel collisions. J. Acoust. Soc. Am. 2012, 132, EL229–EL235. [Google Scholar] [CrossRef] [Green Version]
- Au, W.W.L.; Green, M. Acoustics interaction of humpback whales and whale-watching boats. Mar. Environ. Res. 2000, 49, 469–481. [Google Scholar] [CrossRef]
- Gervaise, C.; Simard, Y.; Roy, N.; Kinda, B.; Menard, N. Shipping noise in whale habitat: Characteristics, sources, budget, and impact on belugas in Saguenay–St. Lawrence Marine Park hub. J. Acoust. Soc. Am. 2012, 132, 76–89. [Google Scholar] [CrossRef] [Green Version]
- Kipple, B.M.; Gabriele, C.M. Glacier Bay Watercraft Noise–Noise Characterization for Tour, Charter, Private, and Government Vessels; Naval Surface Warfare Center Technical Report NSWCCD-71-TR-2004/545; Naval Surface Warfare Center: Bremerton, WA, USA, 2004. [Google Scholar]
- Brooker, A.; Humphrey, V. Measurement of radiated underwater noise from a small research vessel in shallow water. Ocean Eng. 2015, 120, 182–189. [Google Scholar] [CrossRef] [Green Version]
- Kipple, B.M.; Gabriele, C.M. Glacier Bay Watercraft Noise; Naval Surface Warfare Center Technical Report NSWCCD-71-TR-2003/522; Naval Surface Warfare Center: Bremerton, WA, USA, 2003. [Google Scholar]
- Buckstaff, K.C. Effects of watercraft noise on the acoustic behaviour of bottlenose dolphins Tursiops truncates in Sarasota Bay, Florida. Mar. Mam. Sci. 2004, 20, 709–725. [Google Scholar] [CrossRef]
- Malinowski, S.J.; Gloza, I.; Domagalski, J. The character of underwater noise radiated by small vessels. Hydroacoustics 2001, 4, 161–164. [Google Scholar]
- Rudd, A.B.; Richlen, M.F.; Stimpert, A.K.; Au, W.W.L. Underwater sound measurements of a high-speed jet-propelled marine craft: Implications for large whales. Pac. Sci. 2015, 69, 155–164. [Google Scholar] [CrossRef]
- Schevill, W.E. Quiet Power Whaleboat. J. Acoust. Soc. Am. 1968, 44, 1157. [Google Scholar] [CrossRef]
- Park, C.; Kim, G.D.; Yim, G.T.; Park, Y.; Moon, I. A validation study of the model test method for propeller cavitation. Ocean Eng. 2020, 213, 107655. [Google Scholar] [CrossRef]
- Atlar, M.; Fitzsimmons, P.; Zoet, P.; Troll, M.; Stark, C.; Sezen, S.; Shi, W.; Aktas, B.; Sasaki, N.; Turkmen, S.; et al. Underwater Noise Measurements with a Ship retrofitted with PressurePoresTM Noise Mitigation Technology and Using HyDroneTM System. 2021. Available online: https://strathprints.strath.ac.uk/76550/ (accessed on 28 July 2021).
- Sharma, S.D.; Mani, K.; Arakeri, V.H. Cavitation noise studies on marine propellers. J. Sound Vib. 1990, 138, 255–283. [Google Scholar] [CrossRef]
- Kellett, P.; Turan, O.; Incecik, A. A study of numerical ship underwater noise prediction. Ocean Eng. 2013, 66, 113–120. [Google Scholar] [CrossRef]
- Tani, G.; Viviani, M.; Hallander, J.; Johansson, T.; Rizzuto, E. Propeller underwater radiated noise: A comparison between model scale measurements in two different facilities and full scale measurements. Appl. Ocean Res. 2016, 56, 48–66. [Google Scholar] [CrossRef]
- Wittekind, D.; Schuster, M. Propeller cavitation noise and background noise in the sea. Ocean. Eng. 2016, 120, 116–121. [Google Scholar] [CrossRef]
- Arveson, P.T.; Vendittis, D.J. Radiated noise characteristics of a modern cargo ship. J. Acoust. Soc. Am. 2000, 107, 118–129. [Google Scholar] [CrossRef]
- Gassmann, M.; Wiggins, S.M.; Hildebrand, J.A. Deep-water measurements of container ship radiated noise signatures and directionality. J. Acoust. Soc. Am. 2017, 142, 1563–1574. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lush, P.A.; Angell, B. Correlation of Cavitation Erosion and Sound Pressure Level. J. Fluids Eng. 1984, 106, 347–351. [Google Scholar] [CrossRef]
- Young, R.W.; Miller, C.N. Noise data for two outboard motors in air and in water. Noise Cont. 1960, 6, 22–25. [Google Scholar] [CrossRef]
- Holmes, L.J.; McWilliam, J.N.; Ferrari, M.C.O.; McCormick, M.I. Juvenile damselfish are affected but desensitize to small motor boat noise. J. Exp. Mar. Bio. Eco. 2017, 494, 63–68. [Google Scholar] [CrossRef]
- Heine, J.C.; Gray, L.M. Merchant Ship Radiated Noise Model, Bolt, Beranek, and Newman Inc. Report 3020; Bolt, Beranek, and Newman Inc.: Cambridge, MA, USA, 1976. [Google Scholar]
- Erbe, C. Underwater Acoustics: Noise and the Effects on Marine Mammals, a Pocket Handbook, 3rd ed.; JASCO Applied Sciences: Victoria, BC, Canada, 2013. [Google Scholar]
- Popper, A.N.; Hawkins, A.; Halvorsen, M. Anthropogenic Sound and Fishes; Report by ICF for Washington State Department of Transportation, Research Office, Report No. WA-RD 891.1; Washington State Department of Transportation: Olympia, WA, USA, 2019; 170p.
- Farcas, A.; Thompson, P.M.; Merchant, N.D. Underwater noise modelling for environmental impact assessment. Environ. Impact Assess. Rev. 2016, 57, 114–122. [Google Scholar] [CrossRef] [Green Version]
- Thilges, K.; Potty, G.; Freeman, S.; Freeman, L.; Van Uffelen, H. Measurements and models of acoustic transmission loss on two Hawaiian coral reefs. Proc. Meet. Acoust. 2019, 39, 070005. [Google Scholar] [CrossRef]
- Erbe, C.; MacGillivray, A.O.; Williams, R. Mapping cumulative noise from shipping to inform marine spatial planning. J. Acoust. Soc. Am. 2012, 132, EL423–EL428. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Erbe, C.; Williams, R.; Sandilands, D.; Ashe, E. Identifying modeled ship noise hotspots for marine mammals of Canadas’ Pacific Region. PLoS ONE 2014, 9, e89820. [Google Scholar] [CrossRef]
- Merchant, N.D.; Pirotta, E.; Barton, T.R.; Thompson, P.M. Monitoring ship noise to assess the impact of coastal developments on marine mammals. Mar. Pollut. Bull. 2014, 78, 85–95. [Google Scholar] [CrossRef] [Green Version]
- Sigray, P.; Mathias Andersson, M.; Pajala, J.; Laanearu, J.; Klauson, A.; Tegowski, J.; Boethling, M.; Fischer, J.; Tougaard, J.; Wahlberg, M.; et al. BIAS: A Regional Management of Underwater Sound in the Baltic Sea. In The Effects of Noise on Aquatic Life II; Advances in Experimental Medicine and, Biology; Popper, A., Hawkins, A., Eds.; Springer: New York, NY, USA, 2016; Volume 875, pp. 1015–1023. [Google Scholar] [CrossRef]
- McCauley, R.D.; Meekan, N.G.; Parsons, M.J.G. Acoustic measurements of a 2600 cubic inch seismic airgun array source and the relationship between acoustic pressure, particle motion and induced ground motion. J. Mar. Sci. Eng. 2021, 9, 571. [Google Scholar] [CrossRef]
- McCloskey, K.P.; Chapman, K.E.; Chapuis, L.; McCormick, M.I.; Radford, A.N.; Simpson, S.D. Assessing and mitigating impacts of motorboat noise on nesting damselfish. Environ. Poll. 2020, 266, 115376. [Google Scholar] [CrossRef] [PubMed]
- Borelli, D. Maritime Airborne Noise: Ships and Harbours. Int. J. Acoust. Vib. 2019, 24, 631. [Google Scholar] [CrossRef]
- Borelli, D.; Gaggero, T.; Rizzuto, E.; Schenone, C. Holistic control of ship noise emissions. Noise Mapp. 2016, 3, 1. [Google Scholar] [CrossRef]
- Fredianelli, L.; Nastasi, M.; Bernardini, M.; Fidecaro, F.; Licitra, G. Pass-by Characterization of Noise Emitted by Different Categories of Seagoing Ships in Ports. Sustainability 2020, 12, 1740. [Google Scholar] [CrossRef] [Green Version]
- Badino, A.; Borelli, D.; Gaggero, T.; Rizzuto, E.; Schenone, C. Airborne noise emissions from ships: Experimental characterization of the source and propagation over land. App. Acoust. 2016, 104, 158–171. [Google Scholar] [CrossRef]
- Lambert, D.R. Airborne Noise Levels on Merchant Ships. A Compilation of Data; Technical Report ADA079356; Naval Ocean Systems Centre: San Diego, CA, USA, 1979; 35p. [Google Scholar]
- Nastasi, M.; Fredianelli, L.; Bernardini, M.; Teti, L.; Fidecaro, F.; Licitra, G. Parameters Affecting Noise Emitted by Ships Moving in Port Areas. Sustainability 2020, 12, 8742. [Google Scholar] [CrossRef]
- Bernardini, M.; Fredianelli, L.; Fidecaro, F.; Gagliardi, P.; Nastasi, M.; Licitra, G. Noise Assessment of Small Vessels for Action Planning in Canal Cities. Environments 2019, 6, 31. [Google Scholar] [CrossRef] [Green Version]
- Badino, A.; Borelli, D.; Gaggero, T.; Rizzuto, E.; Schenone, C. Normative framework for ship noise: Present and situation and future trends. Noise Control Eng. J. 2012, 60, 740–762. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vessel Category | Vessel Type | Description | Hull Type | Lengths in Dataset (m) |
|---|---|---|---|---|
| 1 | Skiff | Single person or small crew, flat bottom, a pointed bow, and a square stern with tiller steering. Typically <10 m length | Planing | 4.3–10 |
| 2 | RHIB | Rigid hull inflatable boat. Typically, centre console, occasionally stern tiller <10 m length | Planing | 5–9.5 |
| 3 | Monohull | Single hull craft without further categorisation. Changes from displacement to planing condition as speed increases. Speed at which change between ploughing and planing occurs is vessel specific. | Semi- displacement | 3.4–24 |
| 4 | Tug | Small, powerful vessel designed particularly to tow or push barges and large ships. | Displacement | 15–25 |
| 5 | Landing craft | Any naval craft designed for conveying troops and equipment from a transport to a beach in an amphibious assault. Typically includes flattened front. | Displacement | 6.4–7.9 |
| 6 | Catamaran | Equivalent of a monohull vessels, but with two separated slender hulls | Semi- displacement | 8.2–25 |
| 7 | Fishing boat | Commercial vessel designed with sufficient power to trawl or pull nets. Changes from displacement to planing hull as speed increases. Speed at which change between ploughing and planing occurs is vessel specific. | Semi- displacement | 10.4–25 |
| 8 | Sailing boat | Monohulled vessel | Displacement | 9–19.8 |
| 9 | Electric | Any vessel powered by an electric motor, often limited in speed. Data recorded at ploughing speeds. | Displacement | 10 |
| 10 | Cargo | Monohull vessel used to transfer cargo. No further information provided. | Displacement | 24–25 |
| 11 | Military | Monohull vessel used for naval procedures. No further information provided. | Displacement | 22 |
| Factor | Justification | Example Citation | Considered | |
|---|---|---|---|---|
| Intrinsic characteristics | ||||
| Vessel type | Vessels designs are task-specific, thus type can impact acoustic signature | [21] | Yes | |
| Hull type | Affects the amount of water displaced and therefore the power required to propel the vessel | [38] | Yes | |
| Vessel length | Larger vessels require additional power (and thus noise) to move through water | [22] | Yes | |
| Beam | [3] | No | ||
| Engine power | Larger powered engines are associated with increased noise levels | [19] | Yes | |
| Engine type | Whether the engines are inboard or outboard may affect the position of the exhaust and noise radiated into the water | [19] | No | |
| Waterline angle | Angle of the hull to the waterline affects the propeller load and vessel drag, thus power and noise | [31] | No | |
| Draft | Affects the amount of water displaced by vessel and thus power required | [34] | No | |
| Propeller | Size | Propeller size, number of blades, gear ratio and propeller revolution rate dictate the frequency of acoustic tones | [22,38] | No |
| No. blades | No | |||
| Speed (rpm) | No | |||
| Gear ratio | No | |||
| Blade angle | No | |||
| Propeller (source) depth | Source depth affects signal propagation. However, in small vessels there is minimal difference in propeller depth between vessels | [31] | No | |
| Onboard machinery | Provides additional sources of noise. The number, size, power and condition of this machinery affects the noise emitted | [39,40] | No | |
| Speed | Source level shown to increase with increasing speed in large vessels | [22] | Yes | |
| Displacement | Increased load and resulting displacement requires additional power to attain the same speed | [34] | No | |
| Extrinsic factors | ||||
| Water depth | Water depth affects the propagation of an acoustic signal | [41] | Yes | |
| Closest point of approach (CPA) | The relationship between range and hydrophone depth can affect the Lloyd mirror pattern and therefore the received level and estimated noise levels | [19] | Yes | |
| Hydrophone depth | [19] | Yes | ||
| Type of propagation model applied | Whether a monopole or dipole source is considered and whether this is considered in the propagation model (RNL or MSL) affects the source estimate. | [19] | Yes | |
| Model source depth | Position of the source in the propagation model affects the received levels and may not always exactly reflect the actual propeller depth | [31] | No | |
| Hydrophone type and system frequency response | Sensitivity is often considered flat over all frequencies even though calibrations are often only conducted at a single frequency (typically 250 Hz). If frequency response is poor at low frequencies, energy is underestimated and thus so is the source level | [42] | No * | |
| Frequency band | If vessel energy is broadband and includes low-frequency energy, an increase in the lower frequency of the reported band can omit energy from the estimate | [43] | No † | |
| Environment conditions | Sea states/currents affect power required to achieve given speed and direction | [22] | No | |
| Variable | Data Type | Overall Sample Size (No. Levels) | Available No. Levels after Data Exploration |
|---|---|---|---|
| Vessel ID | Categorical | 1719 (224) | 49 |
| Vessel Type | Categorical | 1719 (11) | 4 |
| Hull Type | Categorical | 1719 (3) | 2 |
| Length | Continuous | 1719 | |
| Speed | Continuous | 1715 | |
| Engine Power | Continuous | 1519 | |
| Water depth | Continuous | 1714 | |
| Hydrophone depth | Continuous | 1714 | |
| Closest Point of Approach | Continuous | 1689 | |
| Propagation Model | Categorical | 1719 (3) | 3 |
| Reference | Categorical | 1719 (15) | 8 |
| Protocol | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sample Size (n) | ||||||||||||
| From Reference Study | In Statistical Model | |||||||||||
| Article | Year | Location | Water Column (m) | Recordings | Vessels | Recordings | Vessels | Standard | CPA (km) | |||
| Allen et al. [58] | 2011 | Bar Harbour, ME, USA | 30–62 | 16 | 16 | 0 | 0 | x | 0.2–2.1 | |||
| Au and Green [59] | 1999 | Maui, HI, USA | 15–30 | 5 | 5 | 0 | 0 | x | 0.091 | |||
| Brooker and Humphrey [62] | 2014 | Tyneside, UK | 100 | 17 | 1 | 17 | 1 | x | 0.1 | |||
| Erbe [36] | 1999 | Haro Strait, BC, CAN and WA, USA | 70 | 181 | 17 | 157 | 14 | x | 0.01–1.85 | |||
| Erbe et al. [38] | 2016 | Cockburn Sound, WA, AUS | 8 | 26 | 1 | 26 | 1 | x | 0.008–0.018 | |||
| Gervaise et al. [60] | 2009 | Saguenay Fjord, QC, CAN | 170 | 3 | 3 | 0 | 3 | x | 0.214 | |||
| Kipple and Gabriele [61] | 2000, 2002 | Glacier Bay, AK, USA | 55–61 | 39 | 14 | 36 | 12 | x | 0.5 | |||
| Kipple and Gabriele [63] | 2003 | Glacier Bay, AK, USA. | 55 | 14 | 9 | 0 | 0 | x | 0.5 | |||
| McCauley et al. [34] | 1996 | Hervey Bay, QLD, AUS | 20 | 26 | 12 | 0 | 0 | x | Undefined | |||
| Parsons and Meekan [31] | 2019 | Lizard Island, QLD, AUS | 10 | 996 | 3 | 996 | 3 | x | 0.01–0.1 | |||
| Parsons et al. [52] | 2018 | Swan River, WA, AUS | 4 | 34 | 2 | 0 | 1 | x | 0.015–0.05 | |||
| Parsons et al. [52] * | 2018 | Swan River, WA, AUS | 4 | 58 | 51 | 0 | 0 | x | 0.015 | |||
| Wladichuk et al. [50,51] | 2017 | Haro Strait, BC, CAN and WA, USA | 200 | 128 | 25 | 111 | 15 | x | 0.11 | |||
| Veirs et al. [3] | 2011 | Haro Strait, BC, CAN and WA, USA | 70 | 179 | 66 | 0 | 0 | x | 1–3 | |||
| Total | 1727 | 230 | 1355 | 49 | ||||||||
| Hydrophones | ||||||||||||
| Article | Manufacturer | Hydrophone | No. Devices | Depth (m) | Sensitivity with Pre-Amp (dB re 1 V µPa−1) | Bandwidth Applied (kHz) | ||||||
| Allen et al. [58] | Cetacean Research | C54XRS | 3 | 5, 10, 25 | −20 | 0.001–2.5 | ||||||
| Au and Green [59] | Int. Trans. Corp. US Navy U.S.R.D. | TC-1032 and H-52 | 2 | 7.6 | Not given | 0.1–6 | ||||||
| Brooker and Humphrey [62] | Reson | TC4032 | 3 | 50 | −170 | 0.1–10 | ||||||
| Erbe [36] | International Transducer Corp. | TC-4123 | 1 | 5,10 | −145 | 0.01–22 | ||||||
| Erbe et al. [38] | High Tech, Inc. | 92WB | 1 | 8 | −160 | 0.01–40 | ||||||
| Gervaise et al. [60] | High Tech, Inc. | 96 MIN | 4 | 30–140 | −165 | 0.01–20 | ||||||
| Kipple and Gabriele [61] | Not given | Not given | 1 | 30, 50 | Not given | 0.01–35 | ||||||
| Kipple and Gabriele [63] | Not given | Not given | 1 | 30 | Not given | 0.01–35 | ||||||
| McCauley et al. [34] | Massa and Clevite | 1025-C and CH17 | 4 | 20 | −195 and −196 | 0.016–12.5 | ||||||
| Parsons and Meekan [31] | OceanInstruments | SoundTrap ST300 STD | 9 | 8.5 | −169 to −176 | 0.08–20 | ||||||
| Parsons et al. [52] | OceanInstruments | SoundTrap ST300 STD | 1 | 4 | −173.6 | 0.1–20 | ||||||
| Parsons et al. [52] * | OceanInstruments | SoundTrap ST300 STD | 1 | 4 | −173.6 | 0.1–20 | ||||||
| Wladichuk et al. [50,51] | Geospectrum Technologies Inc. | M36 | 2 | 197 | −165 ± 3 | 0.02–100 | ||||||
| Veirs et al. [3] | Reson | TC4032 | 1 | 10 | −164 | 0.012–40 | ||||||
| Data Processing | ||||||||||||
| Article | Propagation Loss * | Surface-Image Correction | Source Approximation | Source Depth | Source Level Type | Vessel Type Reported | ||||||
| Allen et al. [58] | HG | x | Dipole | x | RNL | 7 | ||||||
| Au and Green [59] | SG | x | Dipole | x | RNL | 2,3,6 | ||||||
| Brooker and Humphrey [62] | SG | x | Dipole | x | RNL | 6 | ||||||
| Erbe [36] | SG, RAMGeo, RAY | x✓✓ | Dipole | x | RNL and MSL | 2,3,6,8 | ||||||
| Erbe et al. [38] | SG, RAMGeo | x✓ | Dipole and Monopole | x | RNL and MSL | 2 | ||||||
| Gervaise et al. [60] | SG | x | Dipole | x | RNL | Undefined | ||||||
| Kipple and Gabriele [61] | SG | x | Dipole | x | RNL | 1,3,4,5,8 | ||||||
| Kipple and Gabriele [63] | SG | x | Dipole | x | RNL | 1,3,4,6,7 | ||||||
| McCauley et al. [34] | Linear regression | x | Dipole | x | RNL and ASL | 1,3,8,6 | ||||||
| Parsons and Meekan [31] | Linear regression | x | Dipole | x | RNL and ASL | 1,3 | ||||||
| Parsons et al. [52] | SG, RAMGeo | x✓ | Dipole and Monopole | ✓ | RNL and MSL | 3,9 | ||||||
| Parsons et al. [52] * | SG | x | Dipole | x | RNL | 1,2,3 | ||||||
| Wladichuk et al. [50,51] | SG and RAY | x✓ | Dipole and Monopole | x | RNL and MSL | 1,2,3,5,6,8 | ||||||
| Veirs et al. [3] | HG | x | Dipole | x | RNL | 1,2,3,4,7,10,11 | ||||||
| Parametric Terms | ||||||
|---|---|---|---|---|---|---|
| Fixed Effects | Estimate | SE | t-Value | edf | F | p-Value |
| Intercept α | 157.99 | 2.23 | 70.74 | <2 × 10−16 | ||
| s(CPA) | −2.78 | 2.65 | −1.05 | 6.84 | 13.41 | <2 × 10−16 |
| s(Speed)skiff | 2.76 | 0.79 | 3.47 | 1.96 | 89.4 | <2 × 10−16 |
| s(Speed)RHIB | 18.36 | 7.06 | 2.6 | 5.15 | 36.87 | <2 × 10−16 |
| s(Speed)monohull | 7.86 | 3.84 | 2.05 | 8.35 | 110.22 | <2 × 10−16 |
| s(Speed)catamaran | 5.58 | 3.35 | 1.67 | 2.36 | 28.57 | 4.58 × 10−14 |
| Random effects | Variance | SE | ||||
| Vessel ID | 15.09 | 3.89 | ||||
| Reference | 30.32 | 5.51 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parsons, M.J.G.; Erbe, C.; Meekan, M.G.; Parsons, S.K. A Review and Meta-Analysis of Underwater Noise Radiated by Small (<25 m Length) Vessels. J. Mar. Sci. Eng. 2021, 9, 827. https://doi.org/10.3390/jmse9080827
Parsons MJG, Erbe C, Meekan MG, Parsons SK. A Review and Meta-Analysis of Underwater Noise Radiated by Small (<25 m Length) Vessels. Journal of Marine Science and Engineering. 2021; 9(8):827. https://doi.org/10.3390/jmse9080827
Chicago/Turabian StyleParsons, Miles J. G., Christine Erbe, Mark G. Meekan, and Sylvia K. Parsons. 2021. "A Review and Meta-Analysis of Underwater Noise Radiated by Small (<25 m Length) Vessels" Journal of Marine Science and Engineering 9, no. 8: 827. https://doi.org/10.3390/jmse9080827
APA StyleParsons, M. J. G., Erbe, C., Meekan, M. G., & Parsons, S. K. (2021). A Review and Meta-Analysis of Underwater Noise Radiated by Small (<25 m Length) Vessels. Journal of Marine Science and Engineering, 9(8), 827. https://doi.org/10.3390/jmse9080827