Opportunistic Multi-Technology Cooperative Scheme and UAV Relaying for Network Disaster Recovery



Abstract
:1. Introduction
- −
- It formally characterizes the creation of a multi-tier communication infrastructure of mobile devices with multiple radio interfaces. It then derives a heuristic for clustering nodes based on their local connectivity and available energy.
- −
- It evaluates the performance of smartphones in terms of network interfaces (based on energy consumption and transmission range) and clock synchronization.
- −
- It introduces a scheme for drone-based data collection that minimizes the total flying path, while still ensuring a sufficient time to collect data. In particular, it derives the locations that a hovering drone needs to reach and stop at to collect data from mobile devices based on a multi-tier network structure.
2. Related works
3. Multi-Technology Cooperative Communication and Drone Data Relaying
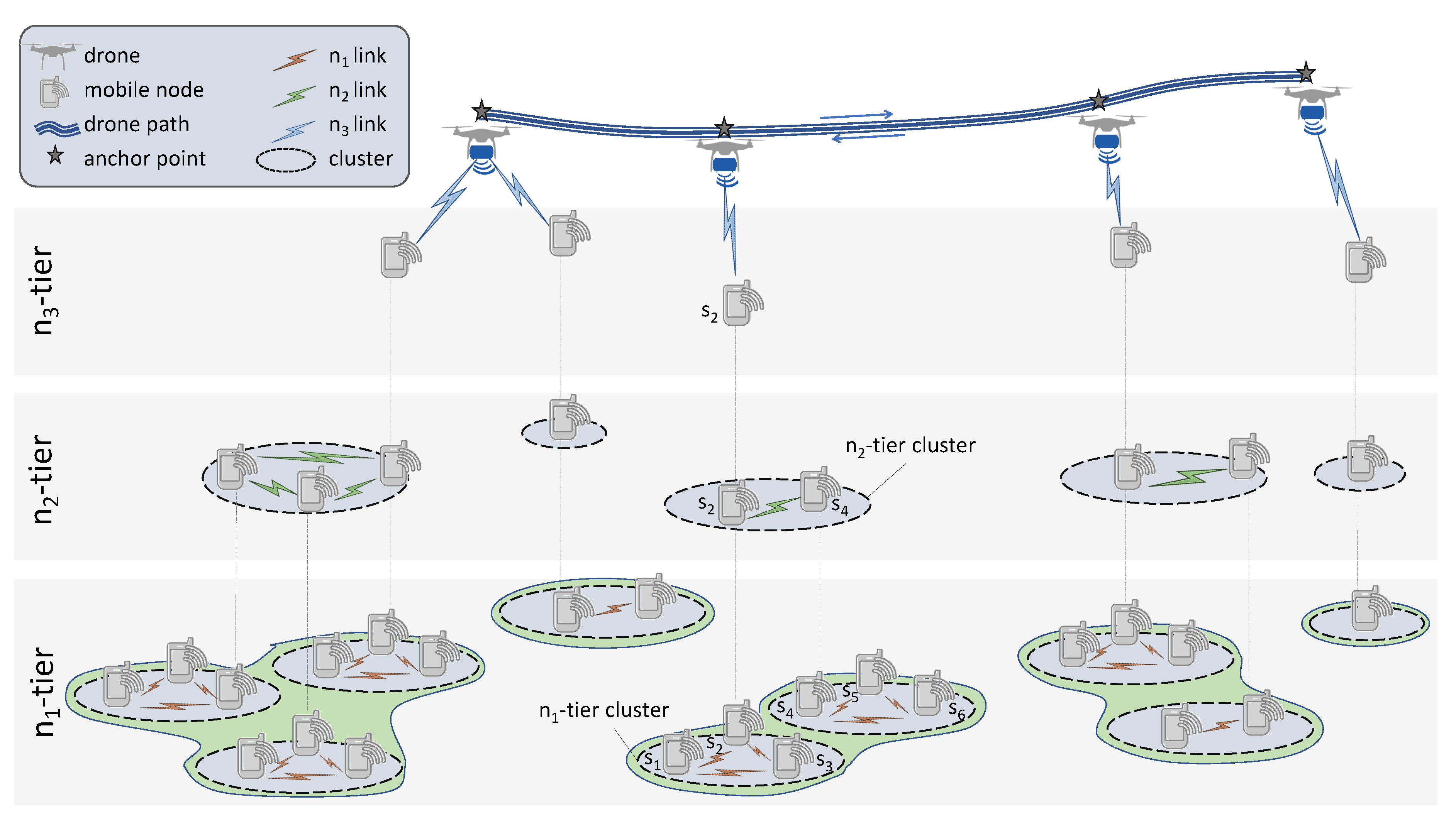
3.1. Multi-Technology Network Architecture
3.2. System Model
3.3. Multi-Technology Communication Algorithm
| Algorithm 1: Dynamic CH selection run at each node m. |
 |
4. Mobile Devices Performances: Smartphone Use Case
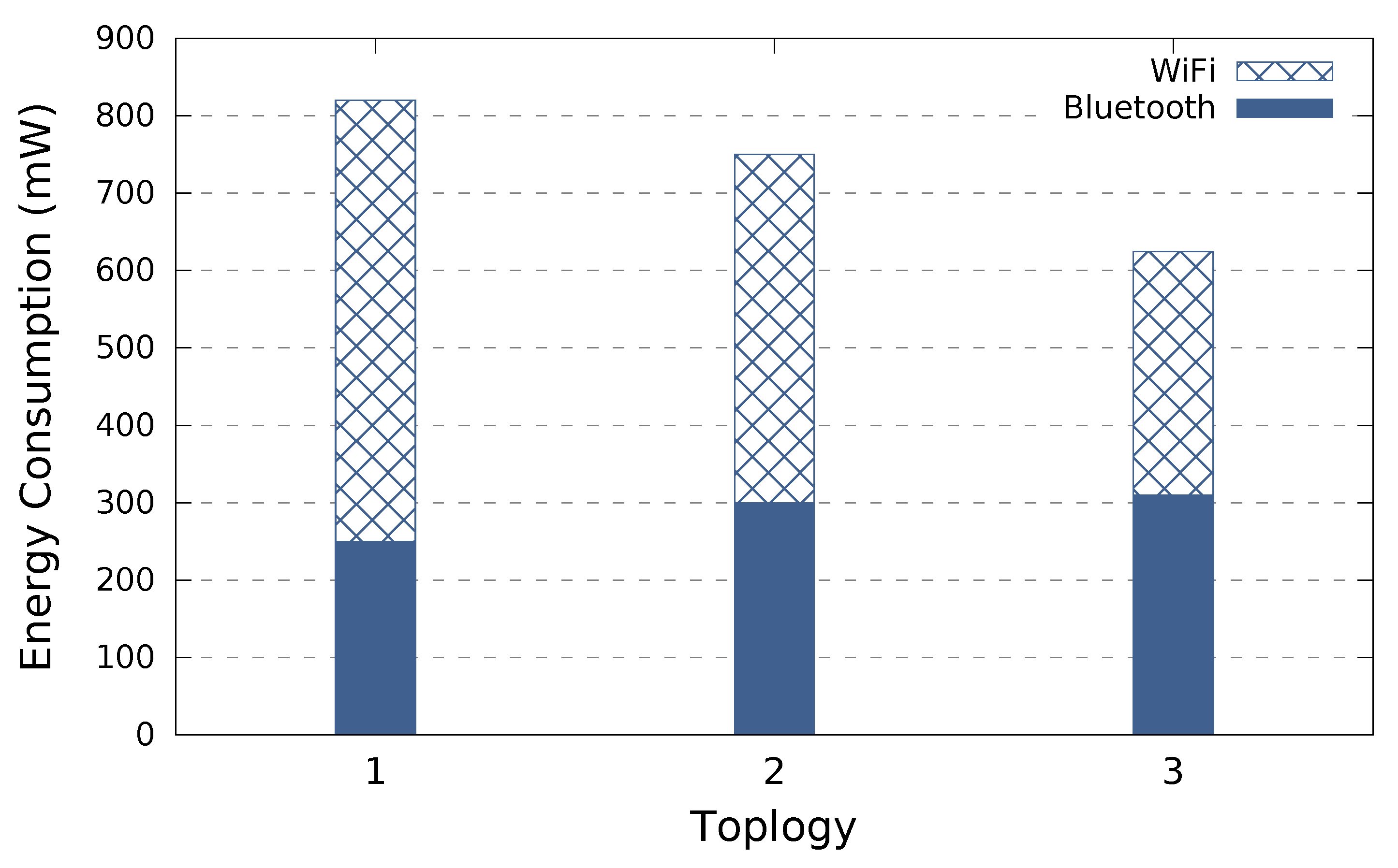
4.1. Energy Consumption and Transmission Range
- a non-cooperative communication scheme considering only one node that operates individually; i.e., nodes switch on their network interfaces (Bluetooth and WiFi direct) for communication
- a cooperative communication scheme (i.e., COPE) considering two and three nodes respectively; i.e., nodes form groups based on the Bluetooth, then, periodically only one node turn on its WiFi interface at the same time to communicate
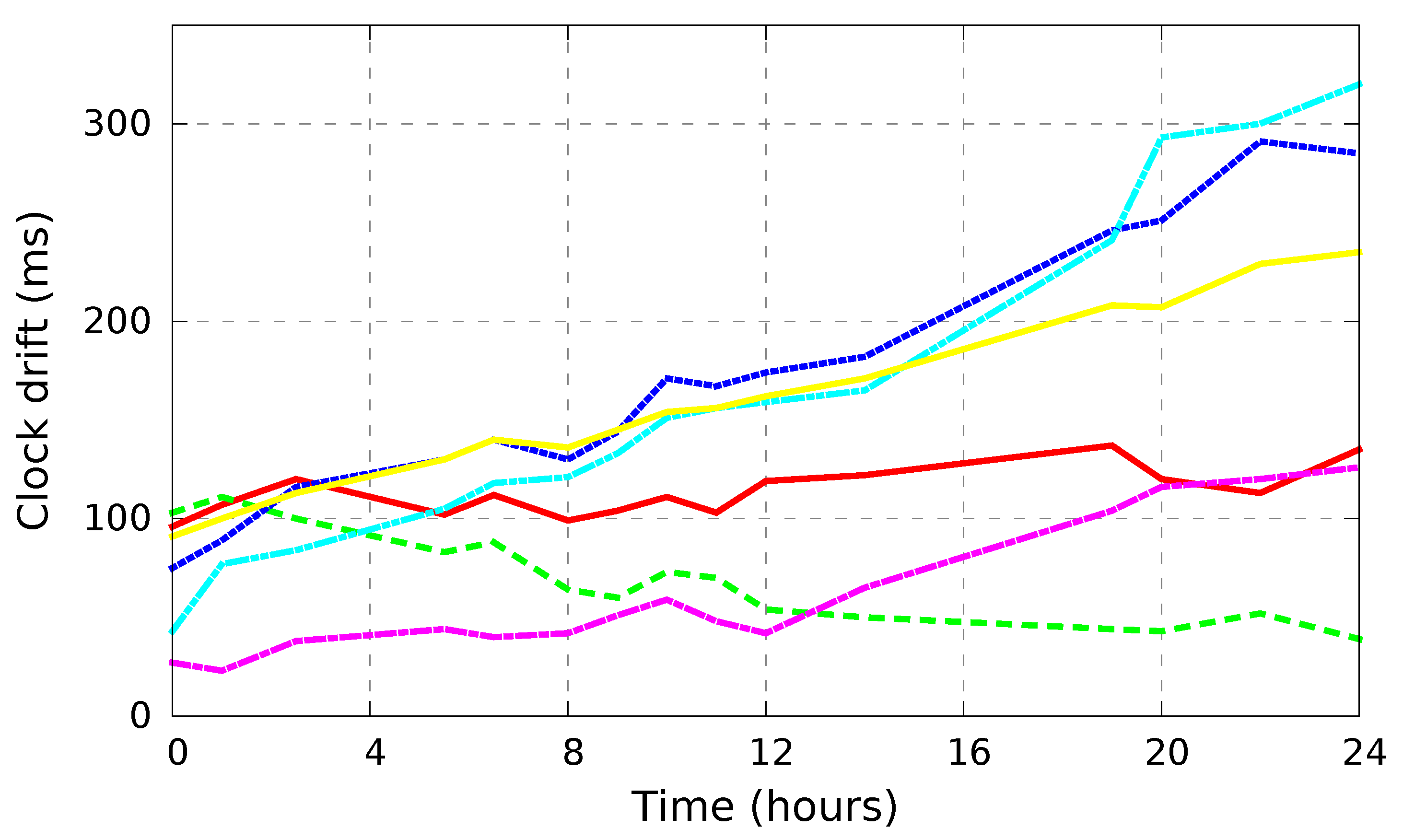
4.2. Clock Drift
5. UAV Data Relaying
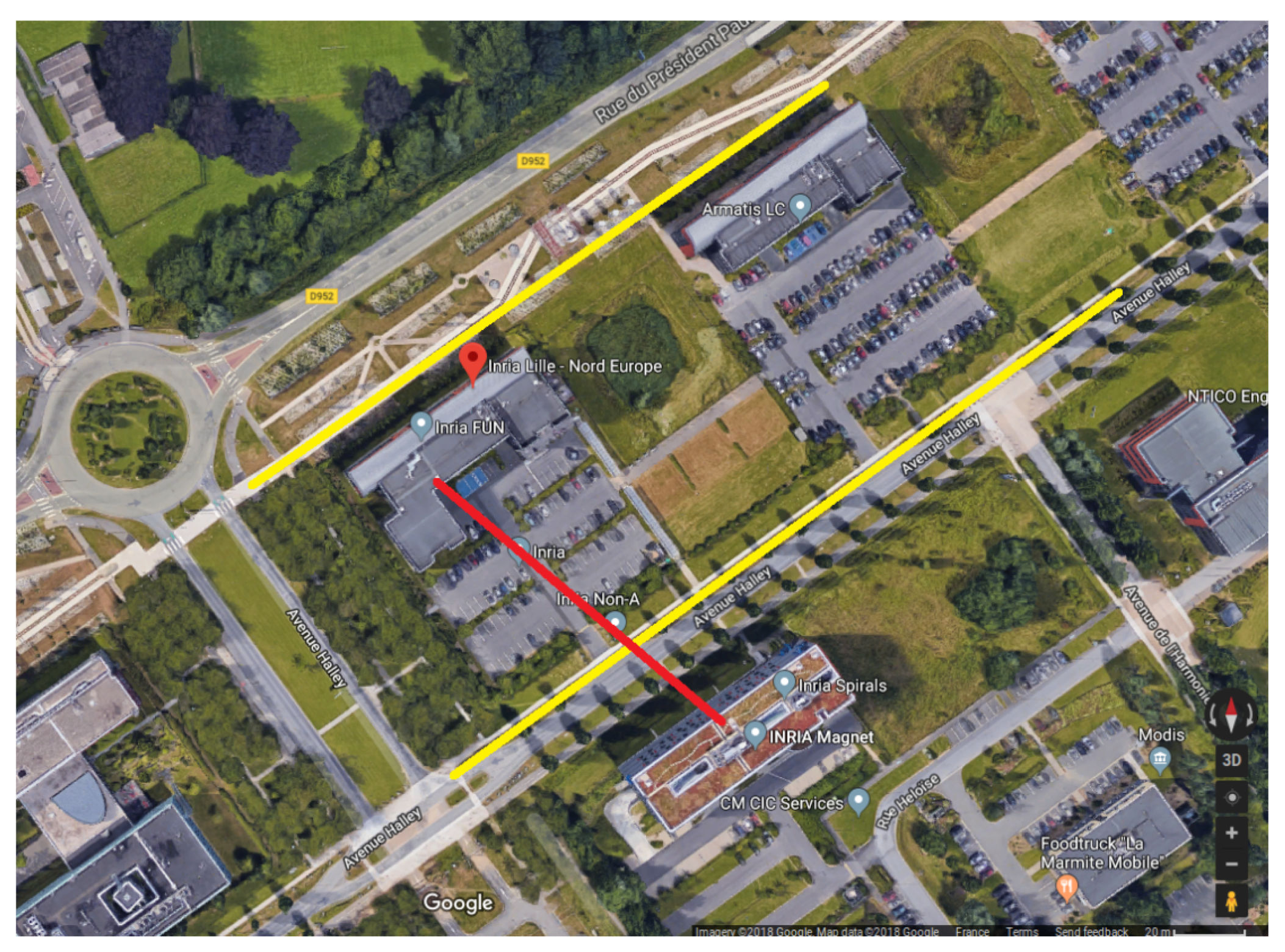
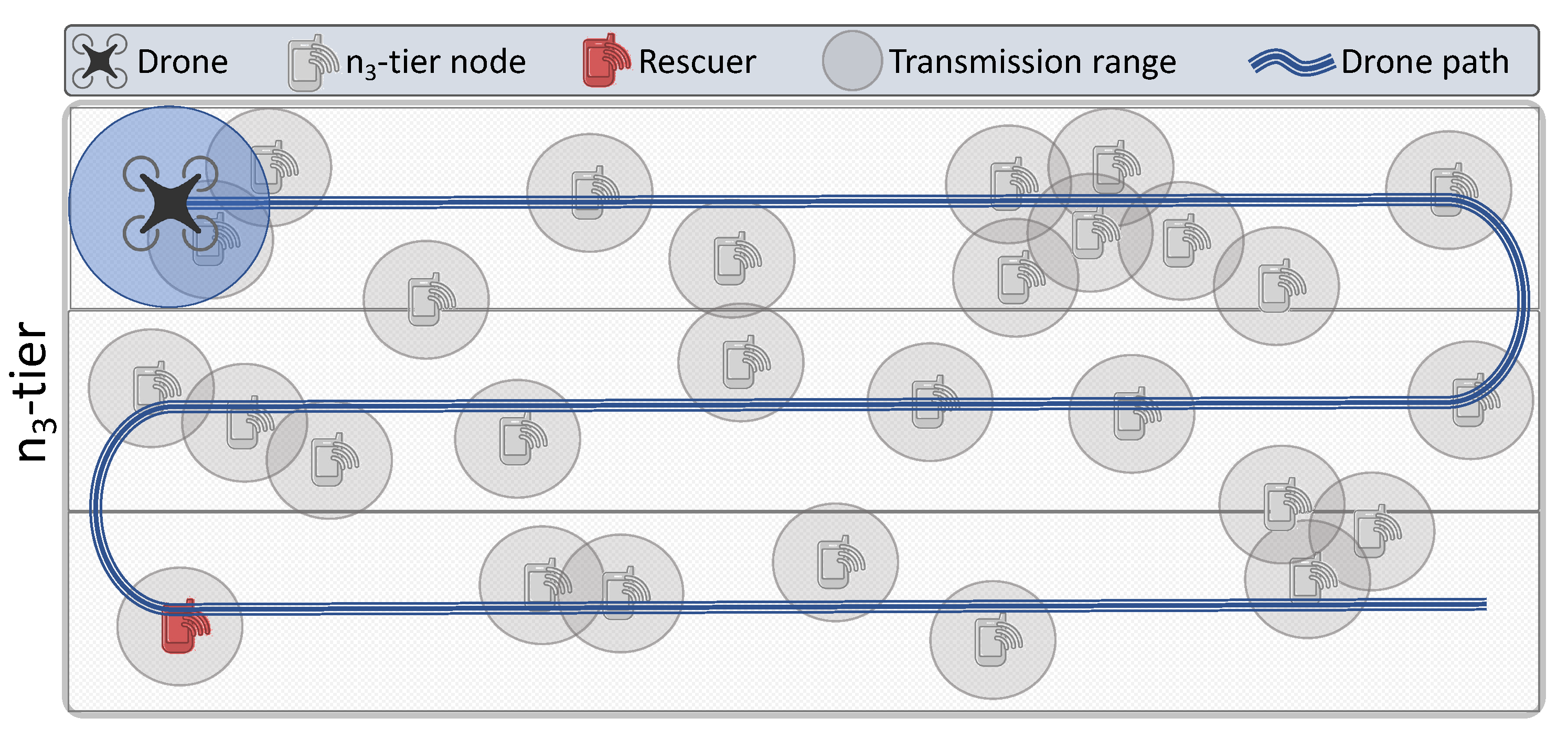
- Search. A drone flies over the area affected by the disaster so as to discover nodes and store their location. The drone follows an S-shaped route, whose curvature guarantees that all nodes can be discovered (see Figure 5).
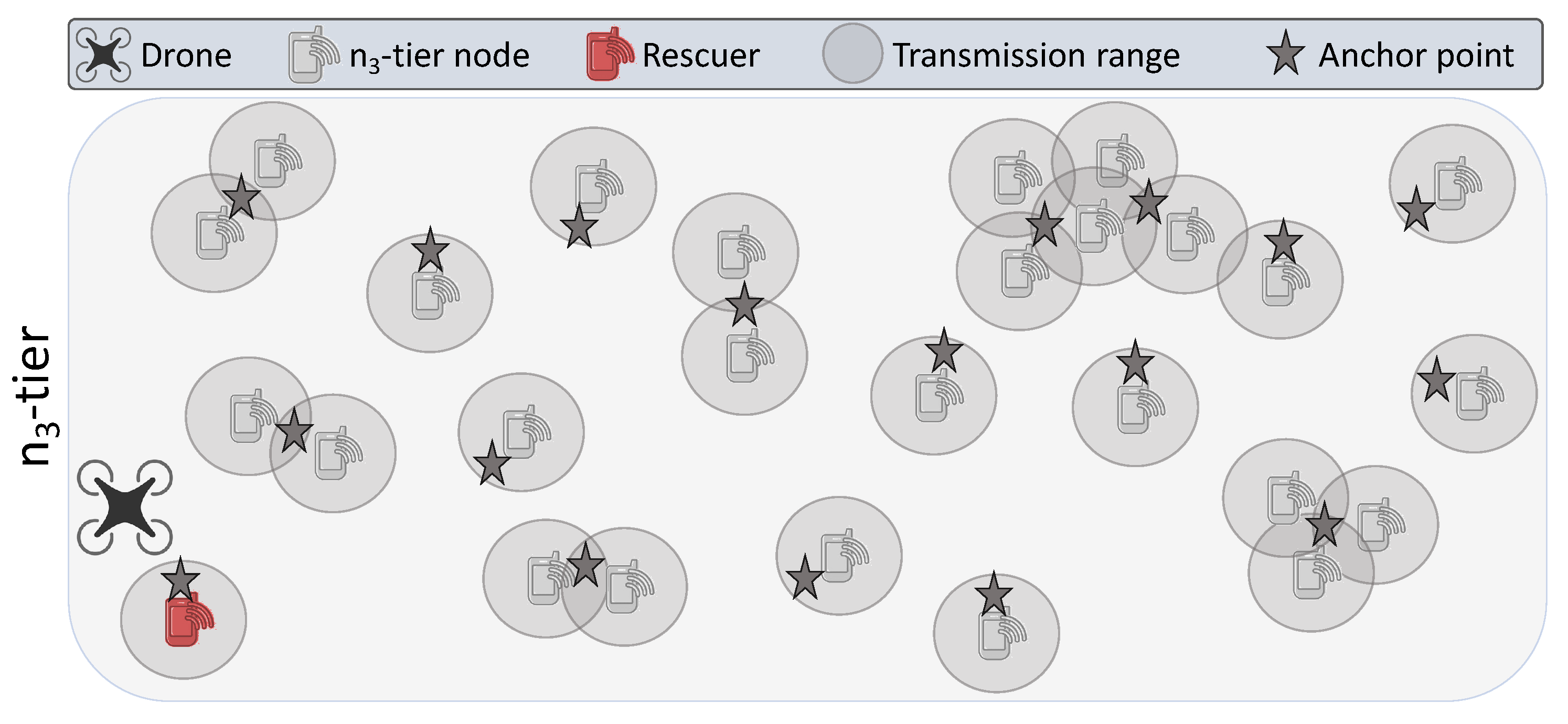
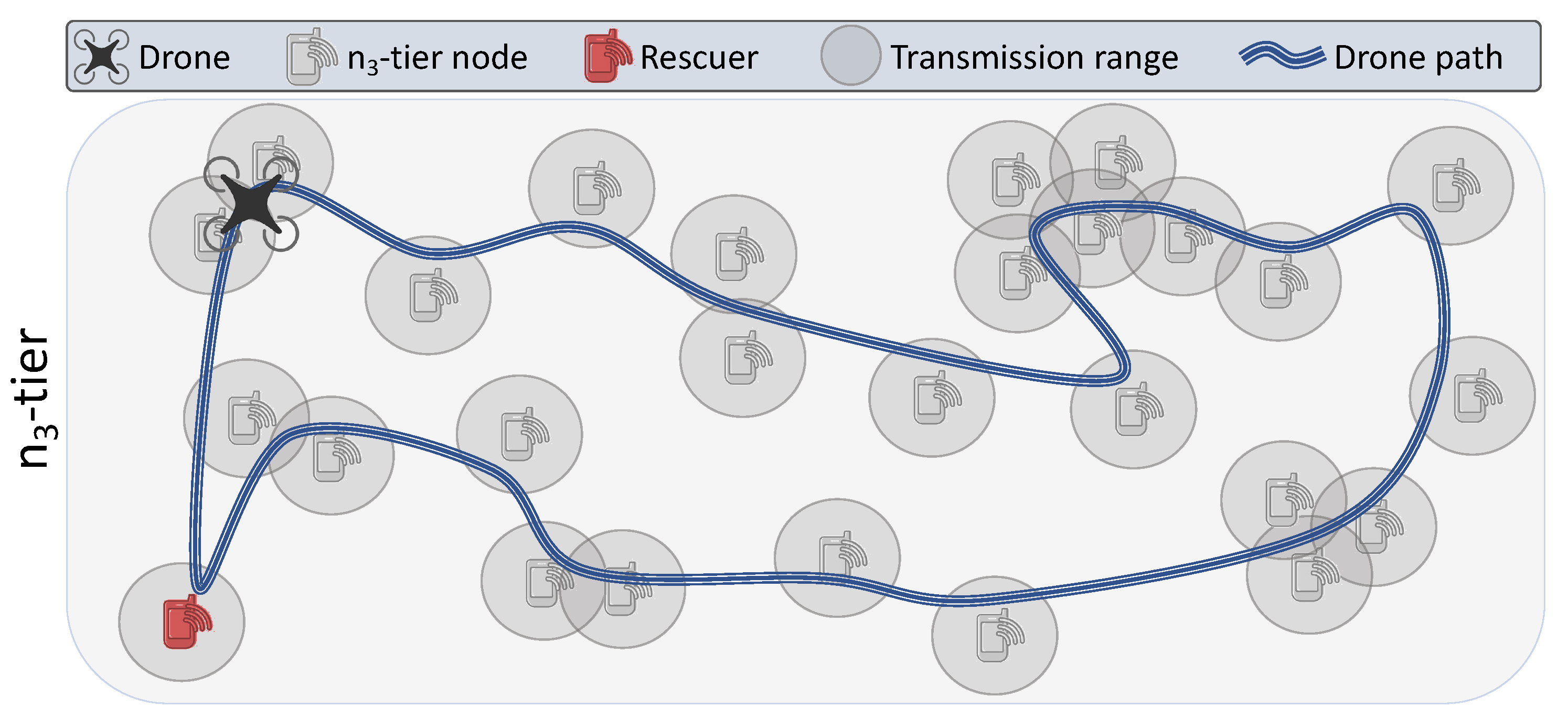
- Anchor points derivation and path planning. Once the nodes are discovered, anchor points are then derived. Anchor points can be either tier nodes or locations from which a drone can reach multiple tier nodes, if possible. That is, an anchor point can be anywhere in between the tier nodes it serves (Figure 6). Hence, there is no need for the drone to hover above each tier node—hovering above the (fewer) anchor points suffices to serve all tier nodes. Consequently, given such anchor points as an input to a path planning algorithm, the shortest path that visits all these points is then constructed. The drone then follows such a path and collects data (Figure 7).
6. Performance Evaluation
6.1. Cooperative Multi-Tier Data Relaying
6.1.1. Methodology and Setup
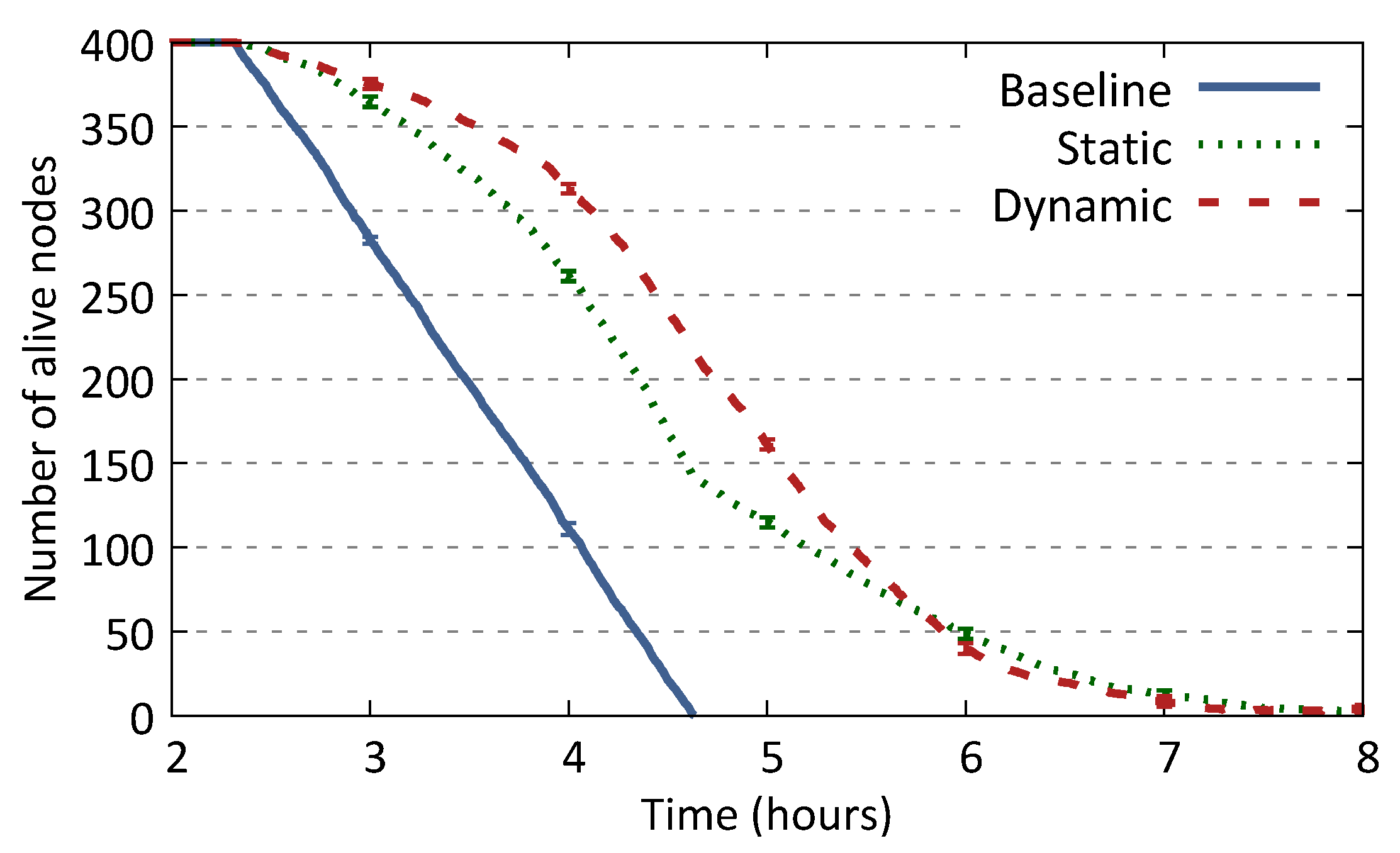
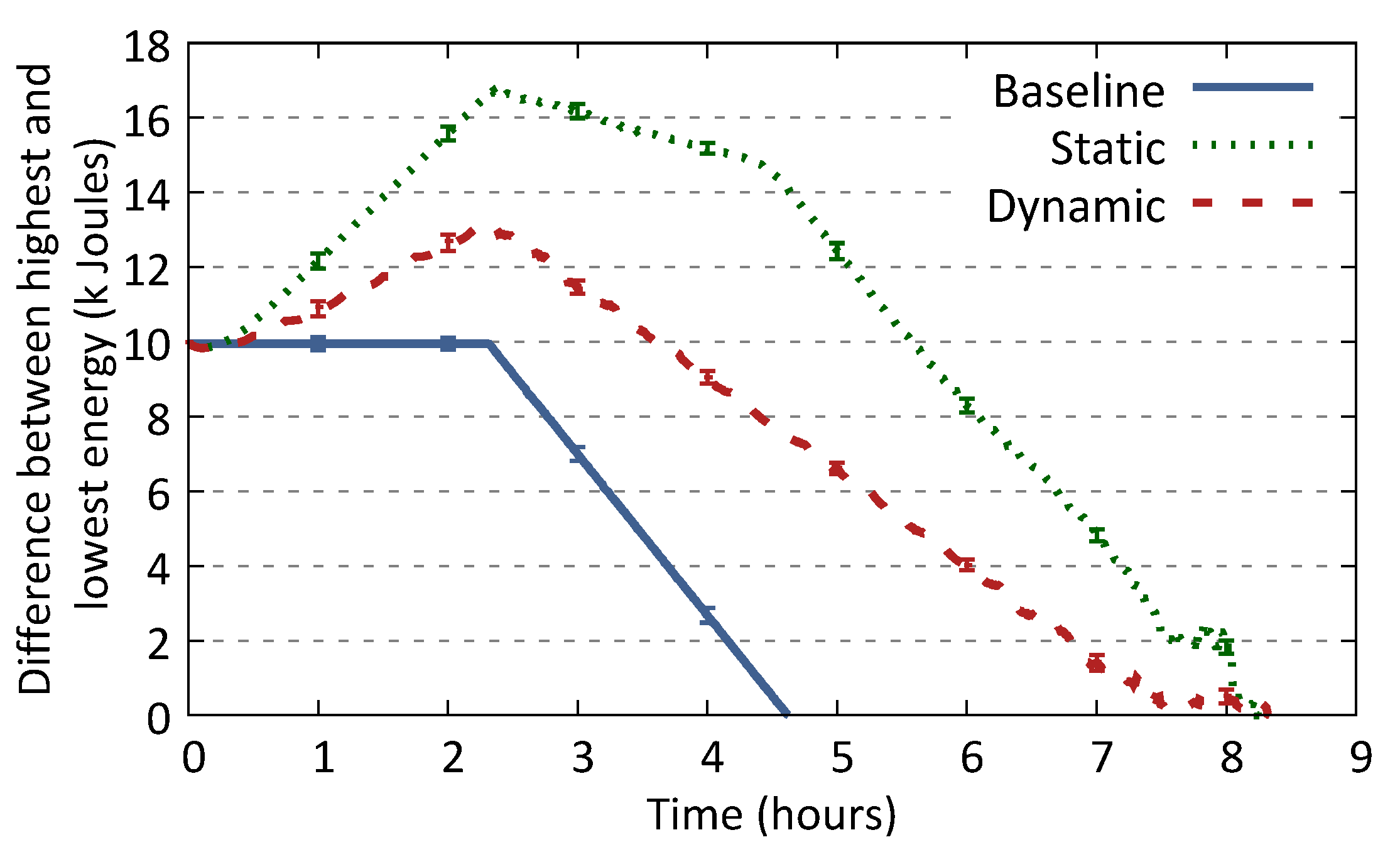
- Baseline approach. It considers every node as a cluster, namely, each node is responsible to switch on all the necessary network interfaces to transmit its own data. Such a scheme provides no collaboration among nodes. In fact, all nodes are exposed to a maximum energy expenditure, which leads to fast battery depletion. Consequently, the chances of a node to keep in contact with search and rescue teams for long periods of time are subject to such a limitation.
- Static approach. The nodes collaborate among each other to relay their data through the tiers. For such a purpose, in the and tier, nodes are organized into clusters and only one responsible node per cluster relays data to the upper tier. Consequently, the other cluster members do not need to switch on the next communication interface, hence mitigating their energy consumption. The CHs are selected based on the initial information on the energy budget of the nodes: the node with the highest available energy level in the cluster becomes the head. Such a node is then responsible to transmit the data of all the cluster members to the next tier. The status of such a node remains invariant over time until its energy fully depletes, which leads to selecting a new CH. Although the static approach provides collaboration among the nodes, it puts the energy expenditure burden on the static CHs only.
6.1.2. Obtained Results
6.2. Cooperative Data Relaying with UAVs
6.2.1. Methodology and Setup
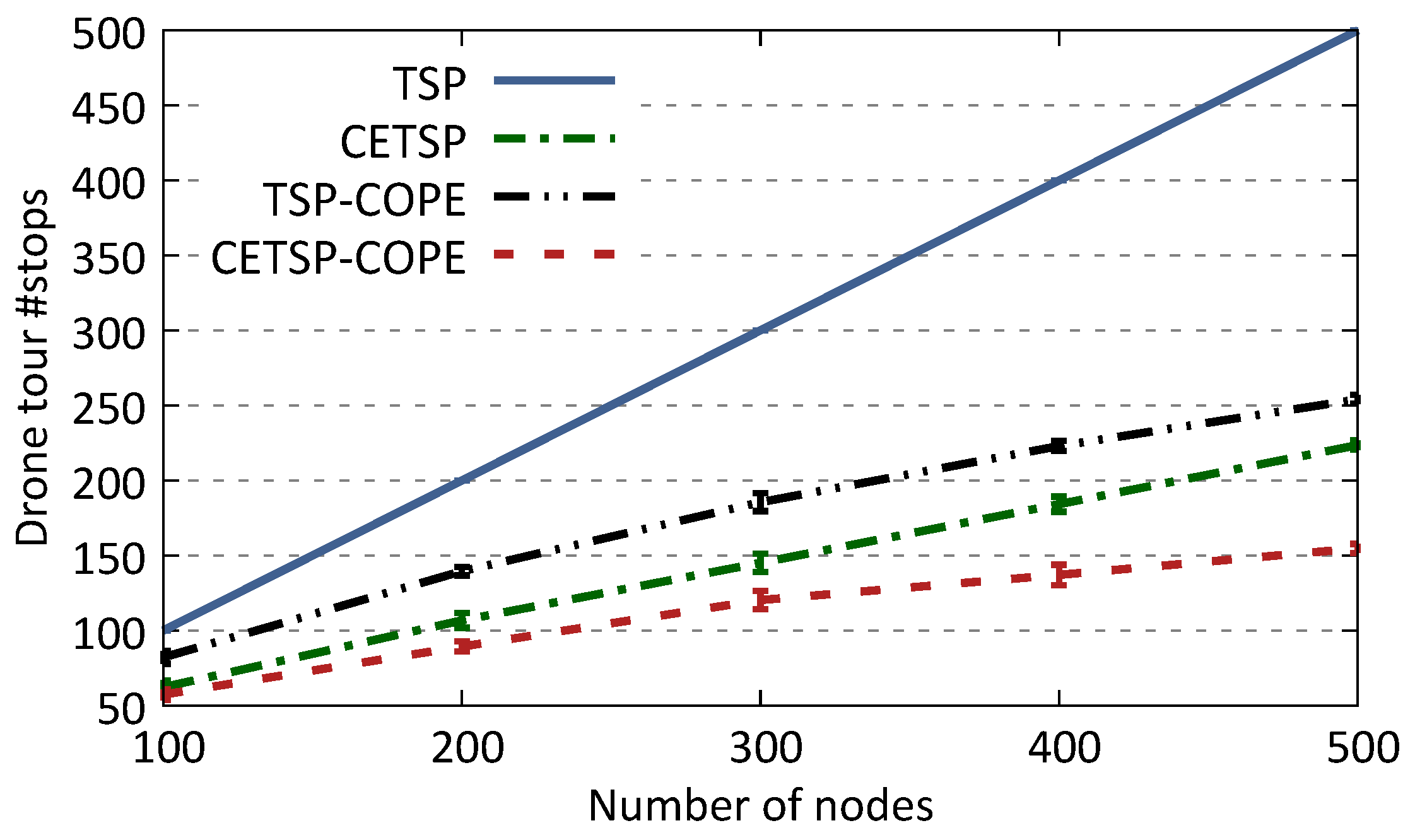
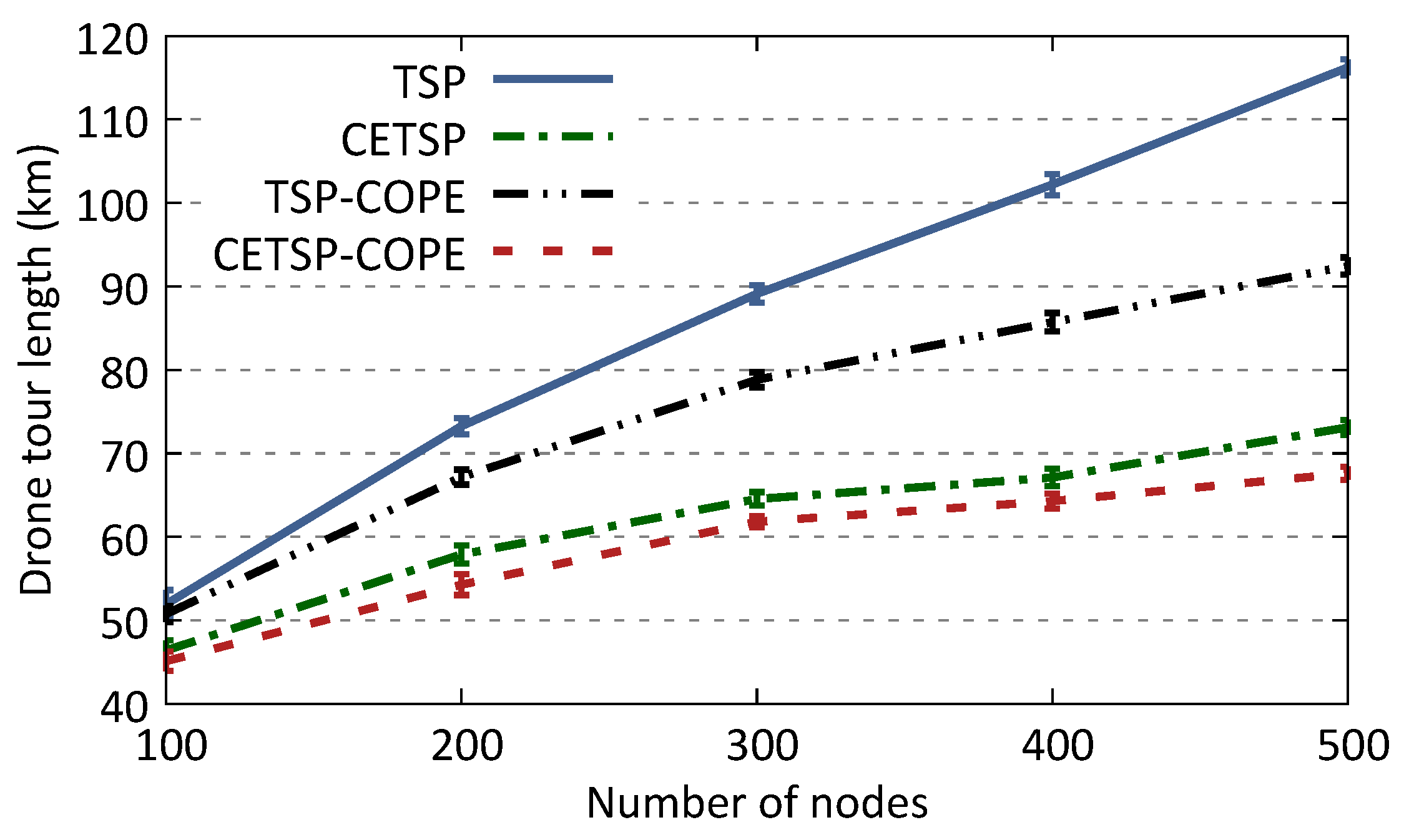
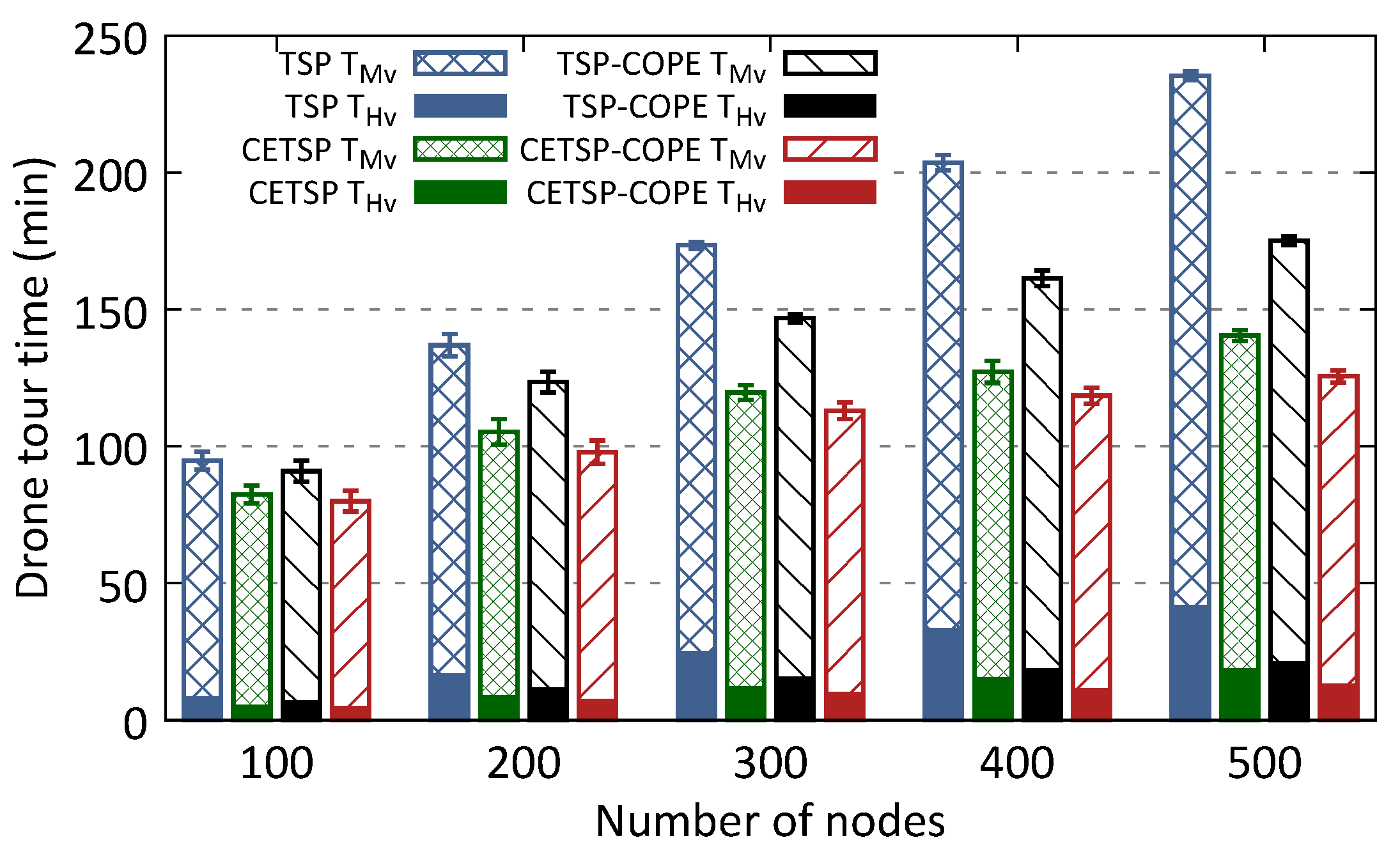
- TSP: finds the optimal route that visits each node in the network; there is no cooperation among the nodes to relay data among each other.
- CETSP: determines the minimum number of stops from which the drone can still communicate with all nodes without having to stop at each of them, and further constructs the shortest path that visits all such stops.
- TSP-COPE: similar to TSP, where node cooperation is supported; the optimal route is calculated based on the tier nodes.
- CETSP-COPE: similar to CETSP, where node cooperation is supported; the optimal route is calculated based on the anchor points obtained from the tier nodes.
6.2.2. Obtained Results
7. Open Challenges and Future Directions
7.1. Survivor and Rescuer MOBILITY
7.2. Belonging to Multiple Cliques
7.3. Devices Heterogeneity
7.4. Unavailability of Some Communication Interfaces
7.5. Multi-Drones
7.6. Dynamic 3D Drones Path Planning
7.7. Users Devices Recharged by Drones
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Unmanned aerial vehicle with underlaid device-to-device communications: Performance and tradeoffs. IEEE Trans. Wirel. Commun. 2016, 15, 3949–3963. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Martín-Campillo, A.; Crowcroft, J.; Yoneki, E.; MartĂ, R. Evaluating opportunistic networks in disaster scenarios. J. Netw. Comput. Appl. 2013, 36, 870–880. [Google Scholar] [CrossRef]
- Quispe, L.E.; Galan, L.M. Behavior of Ad Hoc routing protocols, analyzed for emergency and rescue scenarios, on a real urban area. Expert Syst. Appl. 2014, 41, 2565–2573. [Google Scholar] [CrossRef] [Green Version]
- Yuan, P.; Fan, L.; Liu, P.; Tang, S. Recent progress in routing protocols of mobile opportunistic networks: A clear taxonomy, analysis and evaluation. J. Netw. Comput. Appl. 2016, 62, 163–170. [Google Scholar] [CrossRef]
- Lu, Z.; Cao, G.; La Porta, T. TeamPhone: Networking Smartphones for Disaster Recovery. IEEE Trans. Mob. Comput. 2017, 16, 3554–3567. [Google Scholar] [CrossRef] [Green Version]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement optimization of UAV-mounted mobile base stations. IEEE Commun. Lett. 2017, 21, 604–607. [Google Scholar] [CrossRef] [Green Version]
- Lyu, J.; Zeng, Y.; Zhang, R. Cyclical multiple access in UAV-aided communications: A throughput-delay tradeoff. IEEE Wirel. Commun. Lett. 2016, 5, 600–603. [Google Scholar] [CrossRef] [Green Version]
- Wex, F.; Schryen, G.; Feuerriegel, S.; Neumann, D. Emergency response in natural disaster management: Allocation and scheduling of rescue units. Eur. J. Oper. Res. 2014, 235, 697–708. [Google Scholar] [CrossRef]
- Ochoa, S.F.; Santos, R. Human-centric wireless sensor networks to improve information availability during urban search and rescue activities. Inf. Fusion 2015, 22, 71–84. [Google Scholar] [CrossRef]
- Chakchouk, N. A survey on opportunistic routing in wireless communication networks. IEEE Commun. Surv. Tutor. 2015, 17, 2214–2241. [Google Scholar] [CrossRef]
- Nishiyama, H.; Ito, M.; Kato, N. Relay-by-smartphone: Realizing multihop device-to-device communications. IEEE Commun. Mag. 2014, 52, 56–65. [Google Scholar] [CrossRef]
- Ramchurn, S.D.; Wu, F.; Jiang, W.; Fischer, J.E.; Reece, S.; Roberts, S.; Rodden, T.; Greenhalgh, C.; Jennings, N.R. Human—Agent collaboration for disaster response. Auton. Agents Multi-Agent Syst. 2016, 30, 82–111. [Google Scholar] [CrossRef] [Green Version]
- Bekmezci, I.; Sahingoz, O.K.; Temel, Ş. Flying ad-hoc networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Mezghani, F.; Mitton, N. Alternative opportunistic alert diffusion to support infrastructure failure during disasters. Sensors 2017, 17, 2370. [Google Scholar] [CrossRef] [Green Version]
- Namuduri, K. When Disaster Strikes, Flying Cell Towers Could Aid Search and Rescue. IEEE Spectrum 2017, 54, 38. [Google Scholar] [CrossRef]
- Singh, R.; Thompson, M.; Mathews, S.A.; Agbogidi, O.; Bhadane, K.; Namuduri, K. Aerial Base Stations for Enabling Cellular Communications during Emergency Situation. In Proceedings of the 2017 International Conference on Vision, Image and Signal Processing (ICVISP), Osaka, Japan, 22–24 September 2017. [Google Scholar]
- Merwaday, A.; Guvenc, I. UAV assisted heterogeneous networks for public safety communications. In Proceedings of the Wireless Communications and Networking Conference Workshops (WCNCW), New Orleans, LA, USA, 9–12 March 2015. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Drone small cells in the clouds: Design, deployment and performance analysis. In Proceedings of the Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015. [Google Scholar]
- Bertier, C.; Dias De Amorim, M.; Benbadis, F.; Conan, V. Modeling Realistic Bit Rates of D2D Communications between Android Devices. In Proceedings of the ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems (MSWiM), Miami Beach, FL, USA, 25–29 November 2019. [Google Scholar]
- Gulczynski, D.J.; Heath, J.W.; Price, C.C. The close enough traveling salesman problem: A discussion of several heuristics. In Perspectives in Operations Research; Springer: Boston, MA, USA, 2006; pp. 271–283. [Google Scholar]
- Gendreau, M.; Laporte, G.; Semet, F. The covering tour problem. Oper. Res. 1997, 45, 568–576. [Google Scholar] [CrossRef]
- Putra, G.D.; Pratama, A.R.; Lazovik, A.; Aiello, M. Comparison of energy consumption in Wi-Fi and bluetooth communication in a Smart Building. In Proceedings of the Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 9–11 January 2017. [Google Scholar]
- Perrucci, G.P.; Fitzek, F.H.; Widmer, J. Survey on energy consumption entities on the smartphone platform. In Proceedings of the 73rd Vehicular Technology Conference (VTC Spring), Budapest, Hungary, 15–18 May 2011. [Google Scholar]
- Di Franco, C.; Buttazzo, G. Energy-aware coverage path planning of UAVs. In Proceedings of the 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, Vila Real, Portugal, 8–10 April 2015. [Google Scholar]
- Mezghani, F.; Mitton, N. Benchmarking smartphone performances for cooperative disaster alert diffusion. In Proceedings of the International Conference on Ad-Hoc Networks and Wireless, Cairns, Australia, 20–23 September 2018. [Google Scholar]
- Razafindralambo, T.; Mitton, N.; Carneiro Viana, A.; Dias De Amorim, M.; Obraczka, K. Adaptive Deployment for Pervasive Data Gathering in Connectivity-Challenged Environments. In Proceedings of the 2010 IEEE International Conference on Pervasive Computing and Communications (PerCom), Mannheim, Germany, 29 March–2 April 2010; IEEE: Mannheim, Germany, 2010; pp. 51–59. [Google Scholar]
- Zorbas, D.; Pugliese, L.D.P.; Razafindralambo, T.; Guerriero, F. Optimal drone placement and cost-efficient target coverage. J. Netw. Comput. Appl. 2016, 75, 16–31. [Google Scholar] [CrossRef] [Green Version]
- Mezghani, F.; Mitton, N. Open problem: Energy-and time-efficient dynamic drone path planning for post-disaster network servicing. In Proceedings of the ODS 2018—International Conference on Optimization and Decision Science, Taormina, Italy, 10–13 September 2018. [Google Scholar]
- Li, Z.; Chen, M.; Pan, C.; Huang, N.; Yang, Z.; Nallanathan, A. Joint Trajectory and Communication Design for Secure UAV Networks. IEEE Commun. Lett. 2019, 4, 636–639. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, W.; Shikh-Bahaei, M. Energy Efficient UAV Communication with Energy Harvesting. IEEE Trans. Veh. Technol. 2019. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Pan, C.; Wang, K.; Shikh-Bahaei, M. Energy Efficient Resource Allocation in UAV-Enabled Mobile Edge Computing Networks. IEEE Trans. Wirel. Commun. 2019, 18, 4576–4589. [Google Scholar] [CrossRef]
- Yang, Z.; Pan, C.; Shikh-Bahaei, M.; Xu, W.; Chen, M.; Elkashlan, M.; Nallanathan, A. Joint Altitude, Beamwidth, Location, and Bandwidth Optimization for UAV-Enabled Communications. IEEE Commun. Lett. 2018, 22, 1716–1719. [Google Scholar] [CrossRef] [Green Version]
- Salmerón, J.; Apte, A. Stochastic optimization for natural disaster asset prepositioning. Prod. Oper. Manag. 2010, 19, 561–574. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Smartphone Model | Wiko Tommy 2 |
|---|---|
| OS | Android 7.1 (Nougat) |
| Battery | Li-Po 2500 mAh 9.5 Wh |
| Bluetooth | 4.1, A2DP, LE |
| WiFi | WiFi Direct |
| Bluetooth | Wi-Fi Direct | |
|---|---|---|
| Indoor | 35 m | ≥100 m |
| Outdoor | 50 m | ≥100 m |
| Parameter | Value |
|---|---|
| Disaster area | 10 km × 5 km |
| Drone speed | 10 m/s |
| Minimum hovering time | 5 s |
| Drone- tier node data exchange time | 2 s |
| Bluetooth tx range/power consumption | 100 m/50 mW |
| WiFi tx range/power consumption | 200 m/70 mW |
| Cell tx range/power consumption | 500 m/120 mW |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mezghani, F.; Mitton, N. Opportunistic Multi-Technology Cooperative Scheme and UAV Relaying for Network Disaster Recovery. Information 2020, 11, 37. https://doi.org/10.3390/info11010037
Mezghani F, Mitton N. Opportunistic Multi-Technology Cooperative Scheme and UAV Relaying for Network Disaster Recovery. Information. 2020; 11(1):37. https://doi.org/10.3390/info11010037
Chicago/Turabian StyleMezghani, Farouk, and Nathalie Mitton. 2020. "Opportunistic Multi-Technology Cooperative Scheme and UAV Relaying for Network Disaster Recovery" Information 11, no. 1: 37. https://doi.org/10.3390/info11010037
APA StyleMezghani, F., & Mitton, N. (2020). Opportunistic Multi-Technology Cooperative Scheme and UAV Relaying for Network Disaster Recovery. Information, 11(1), 37. https://doi.org/10.3390/info11010037