Model and Experimental Characteristics of a Pneumatic Linear Peristaltic Actuator


 ,
,
Abstract
:1. Introduction
2. Experimental Setup
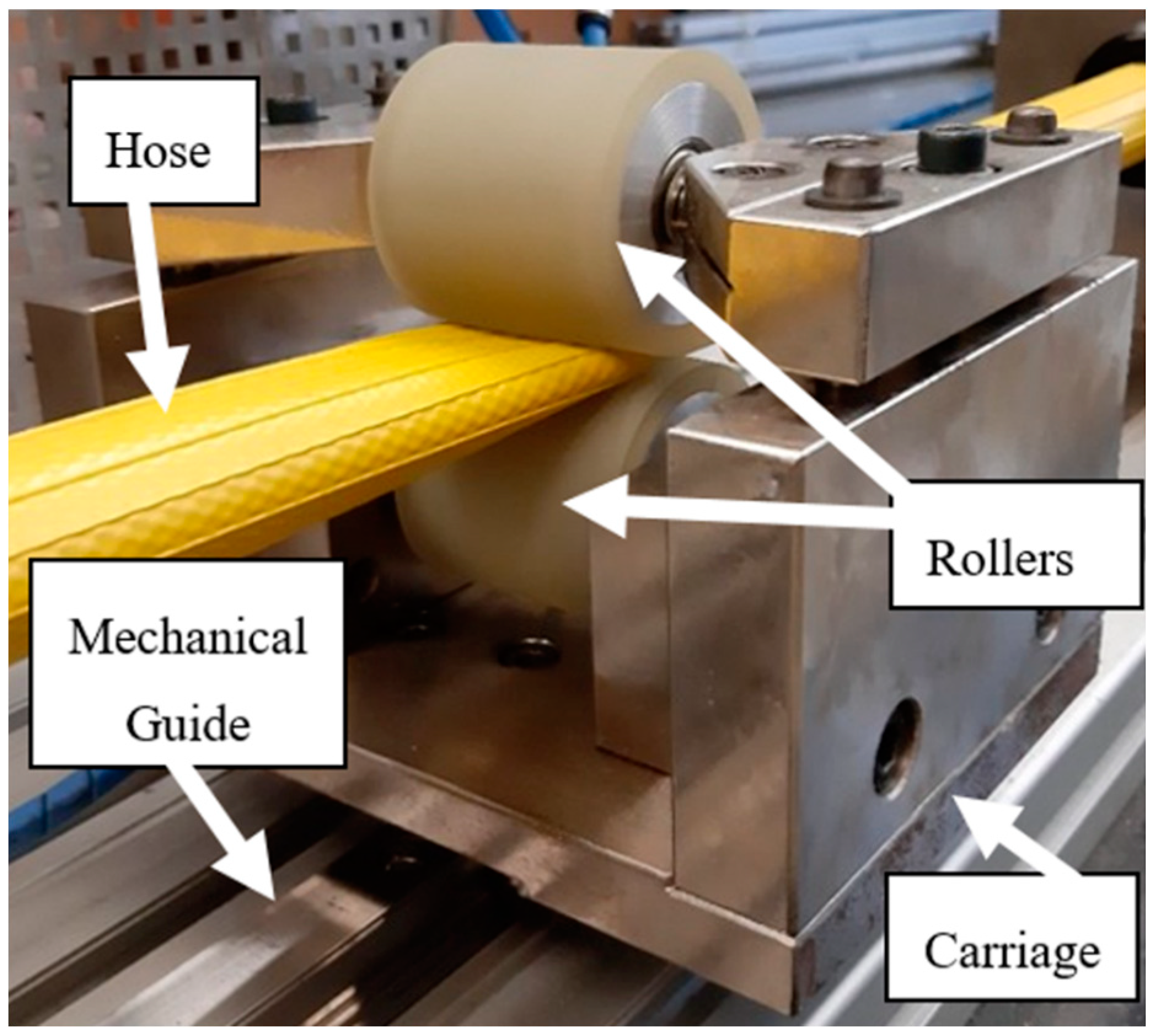
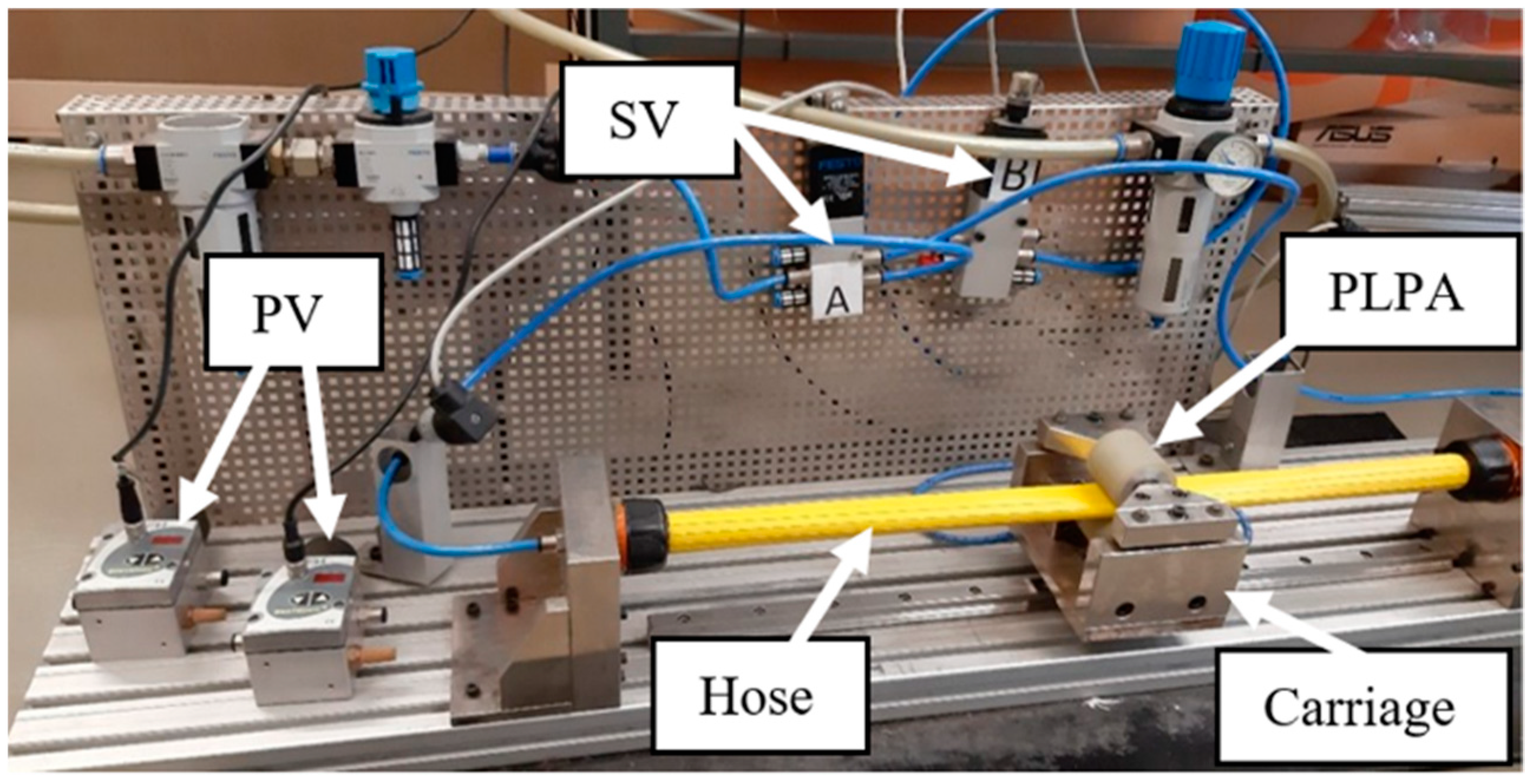
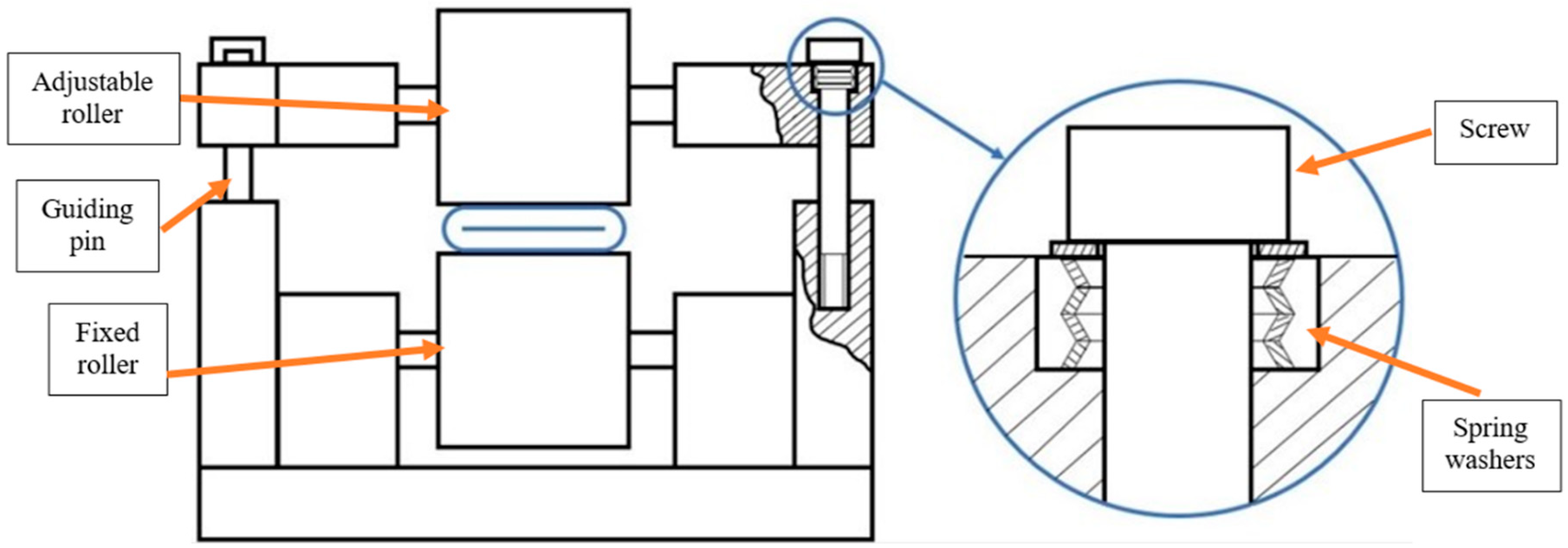
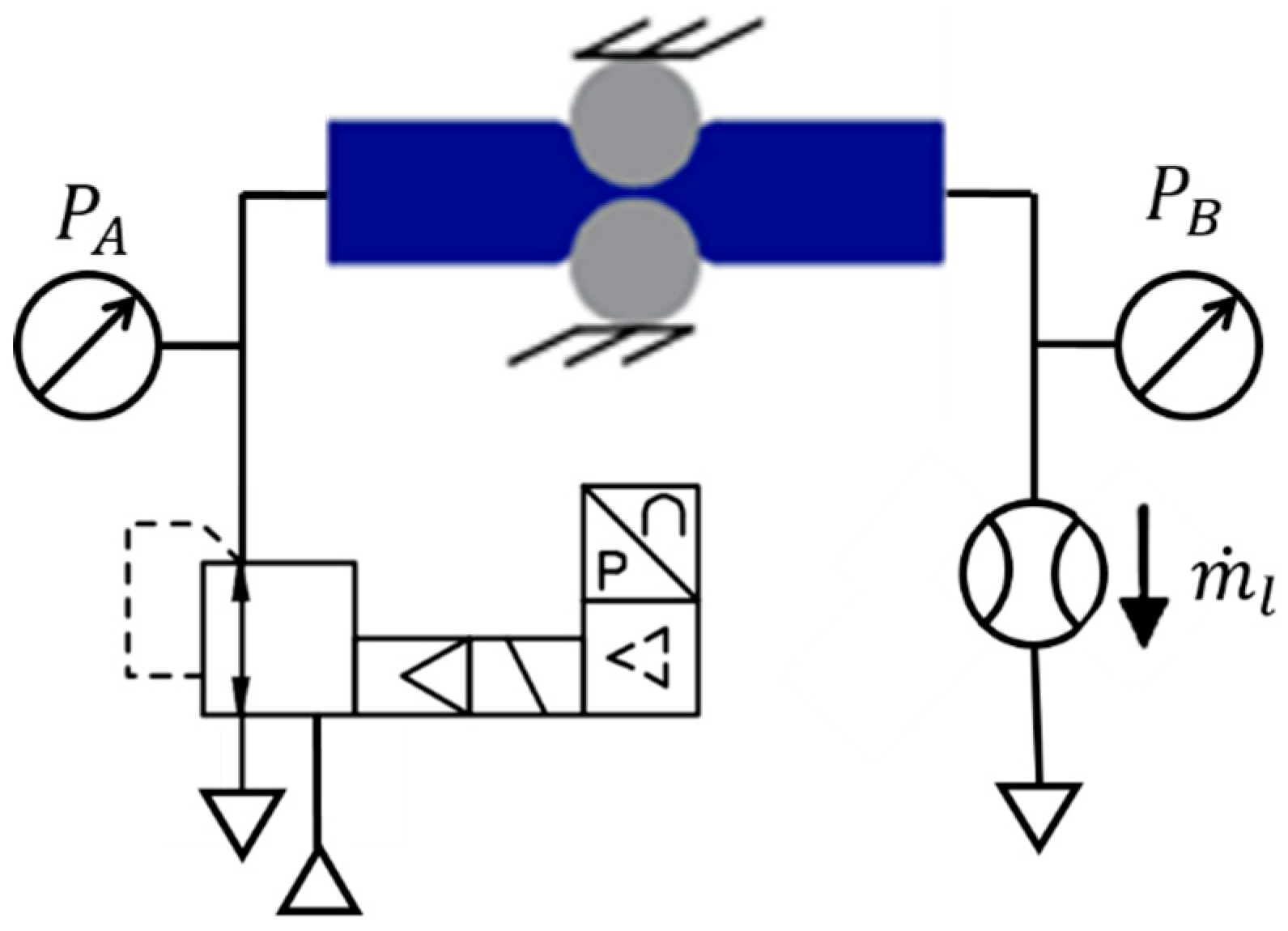
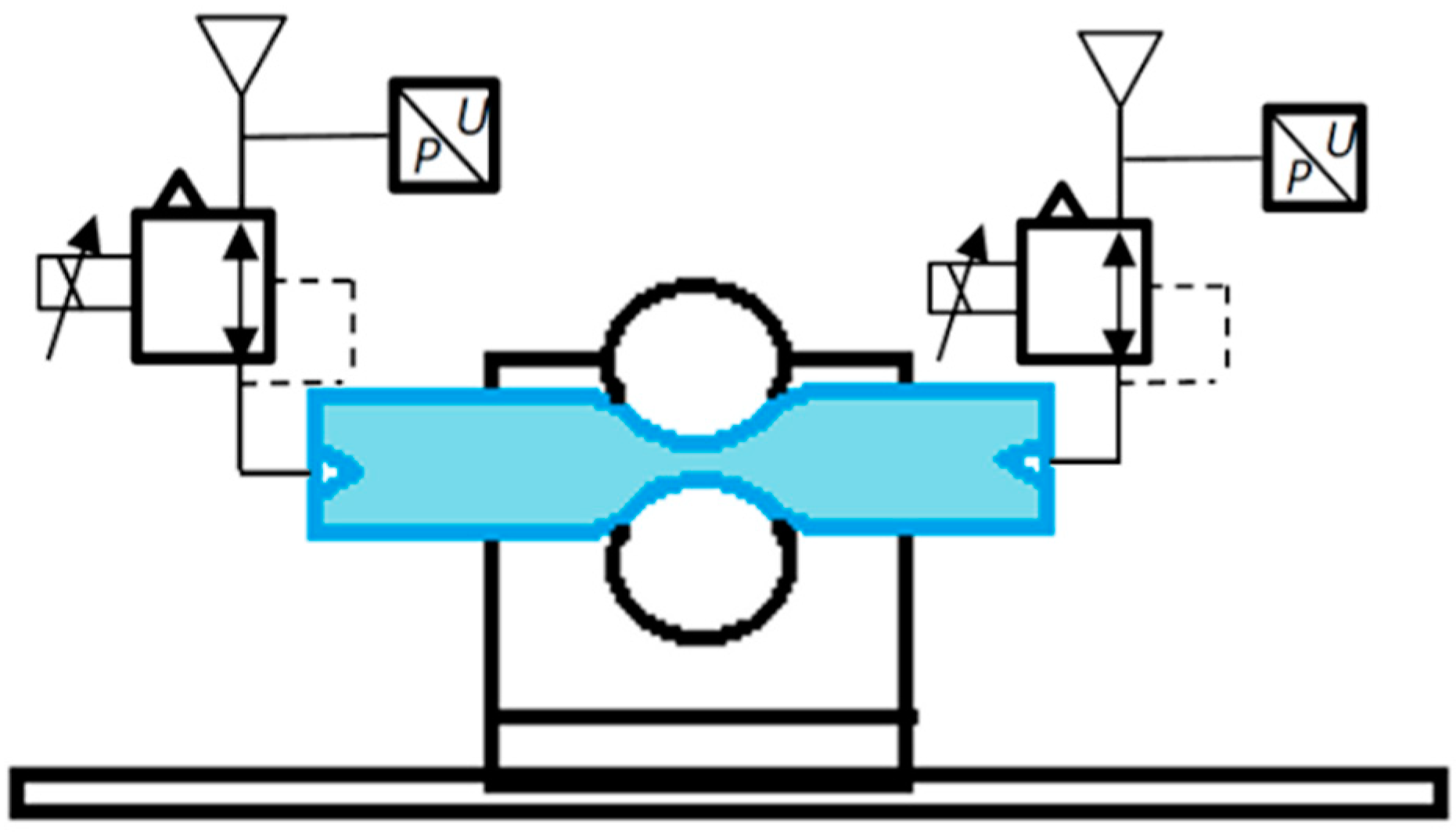
2.1. Overall Description
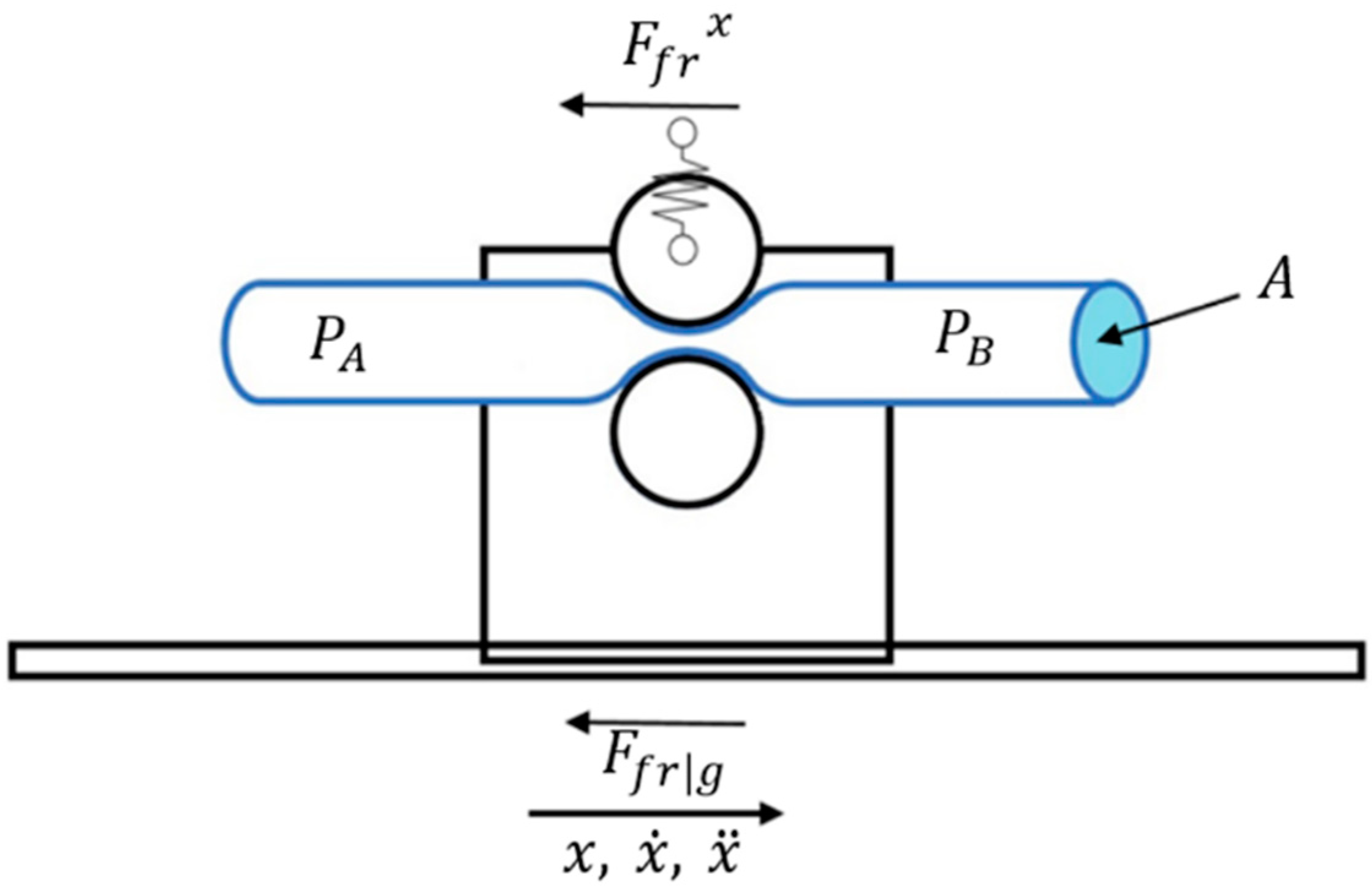
2.2. System Model
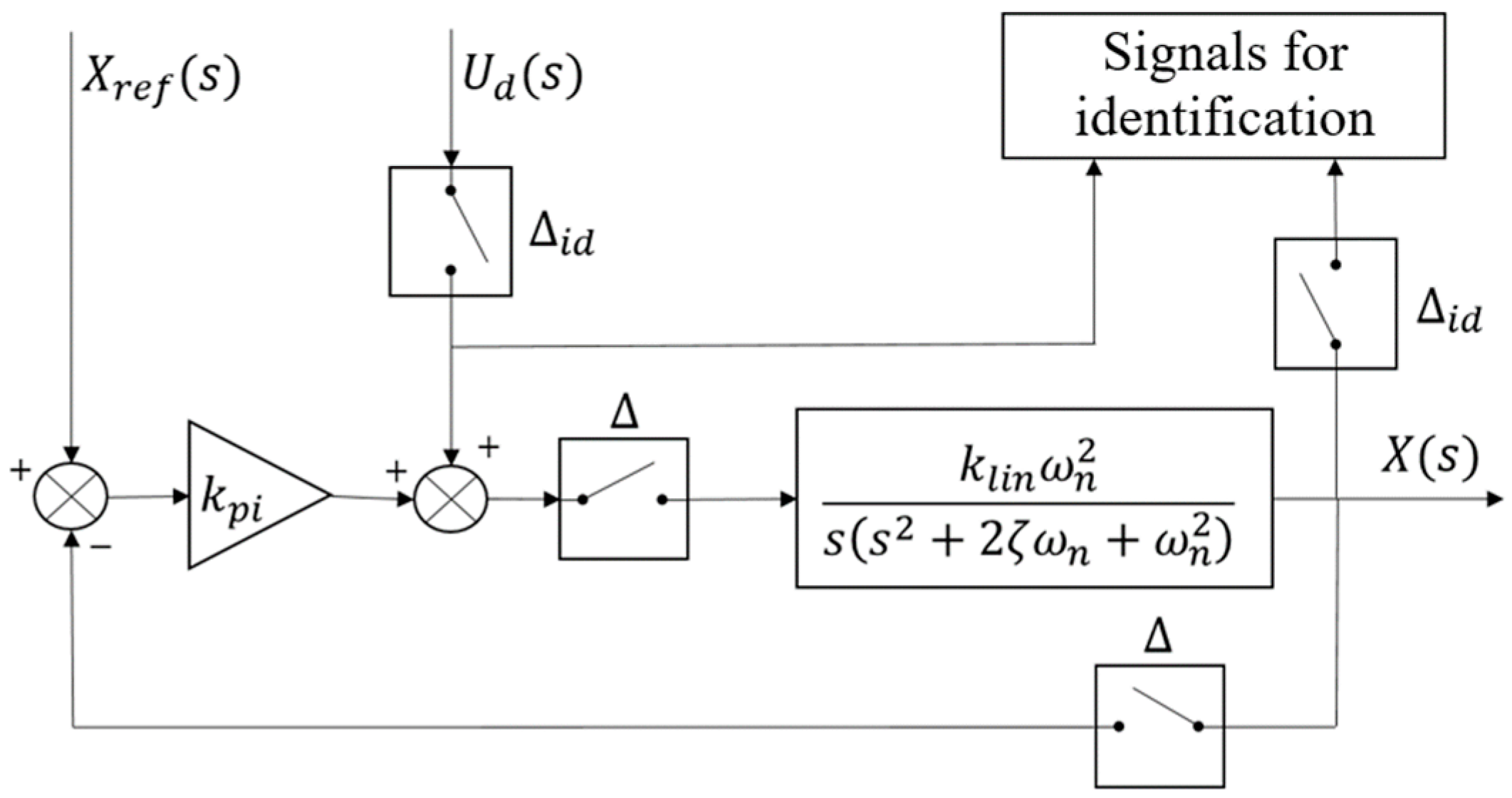
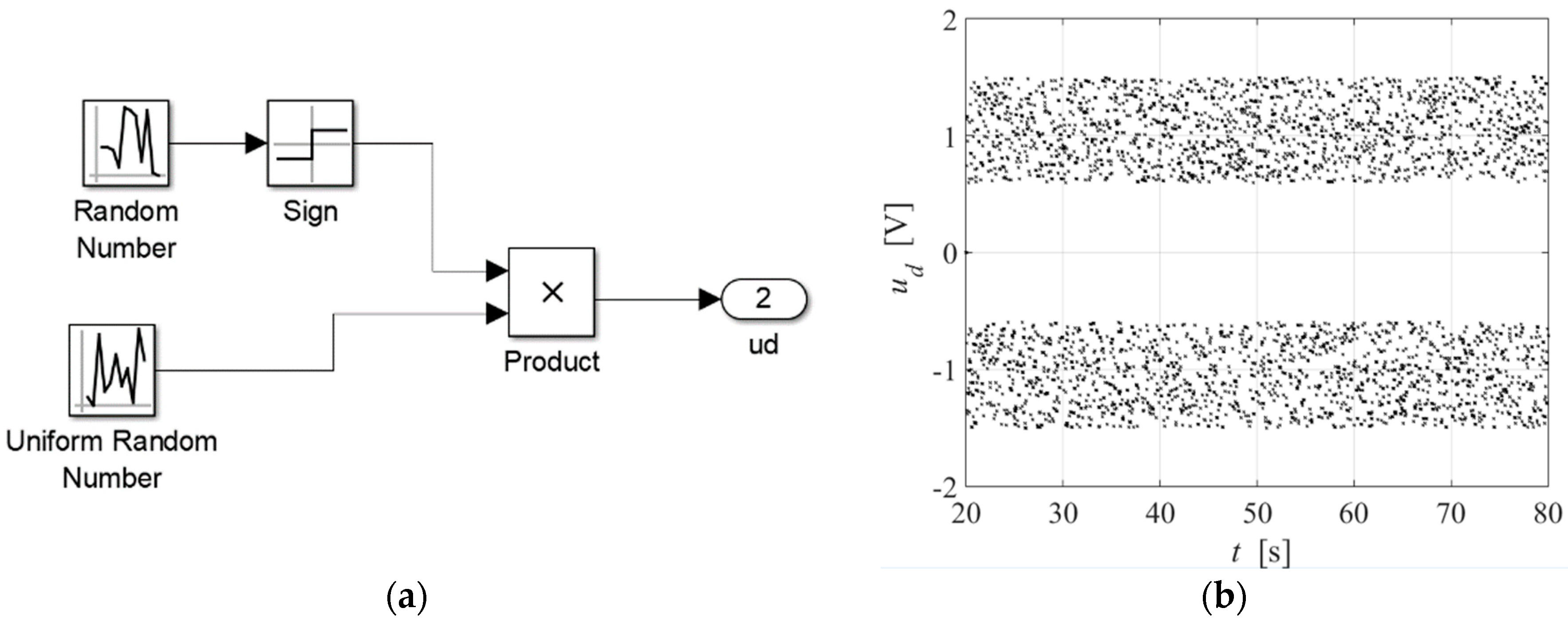
2.3. System Identification
3. Experimental Characterization
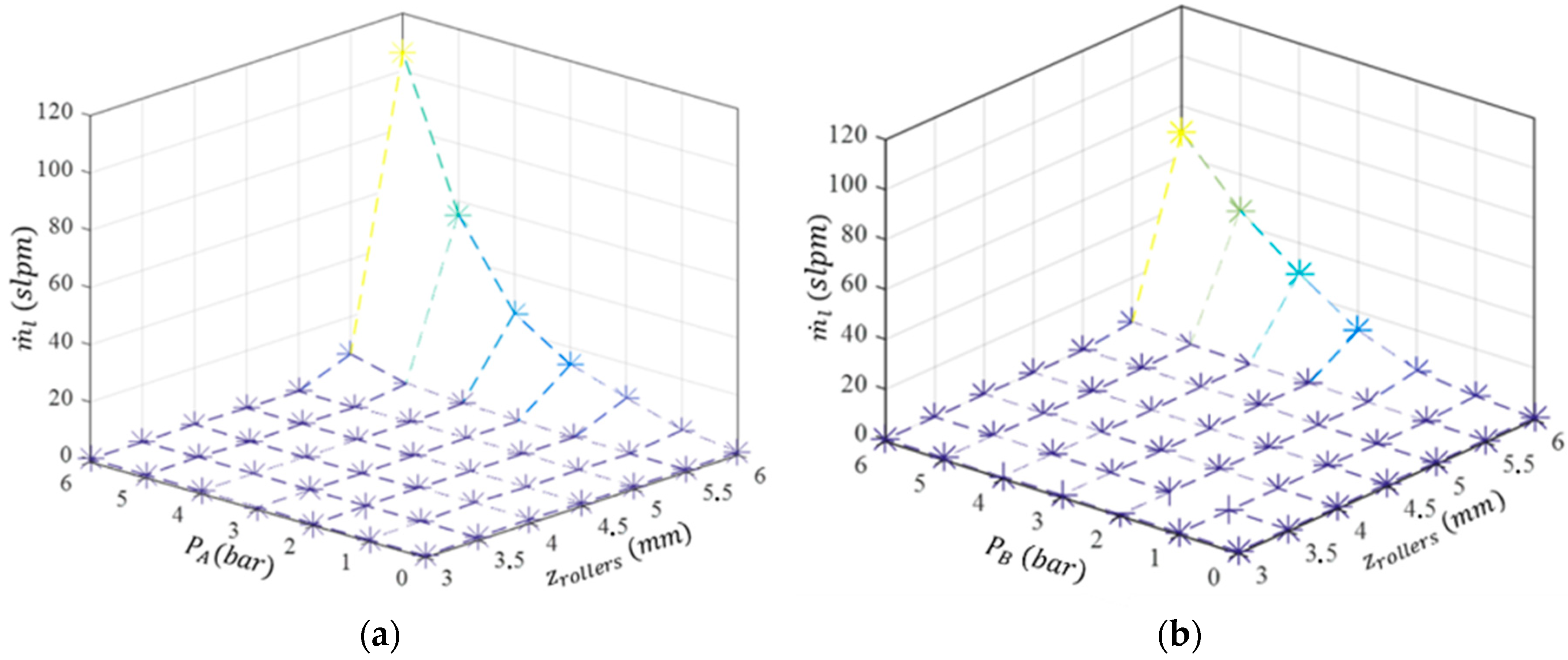
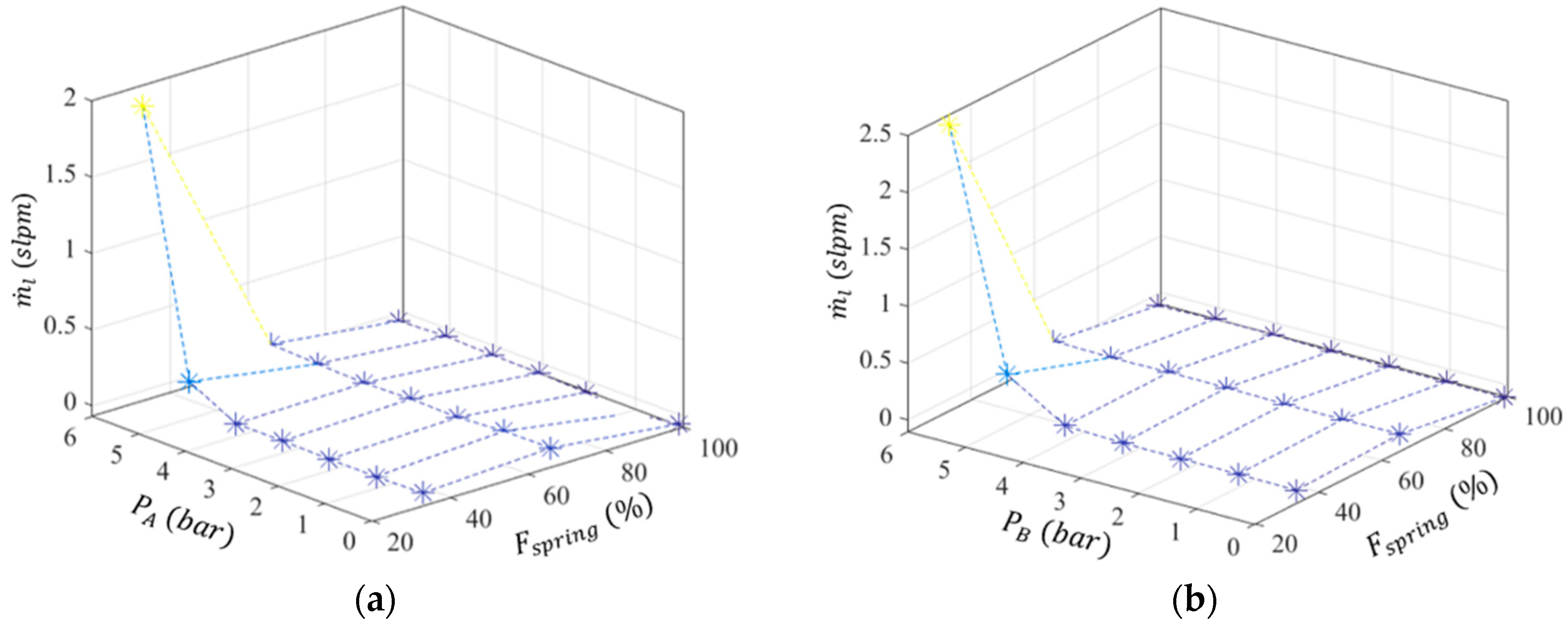
3.1. Leakage Measurements
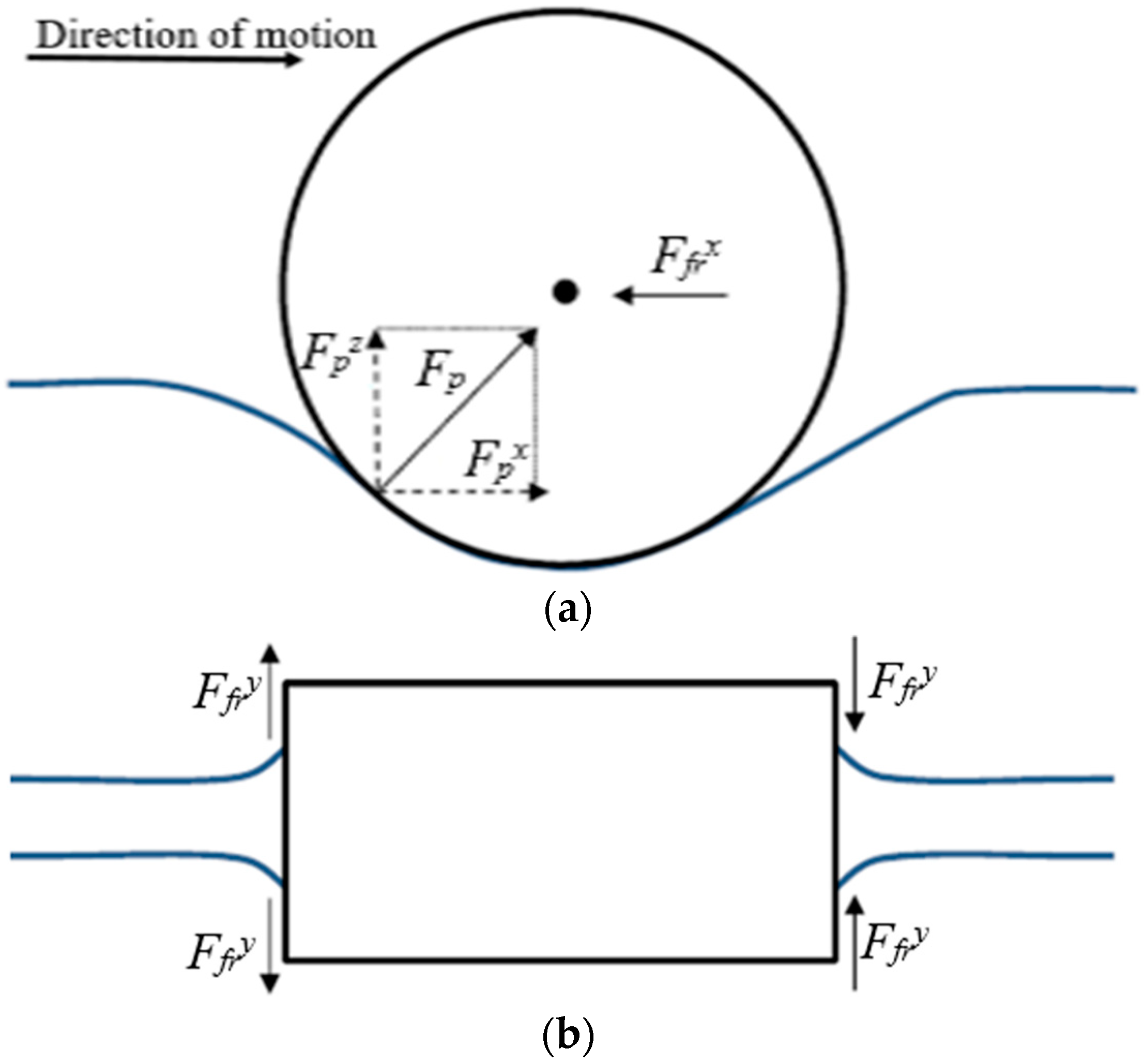
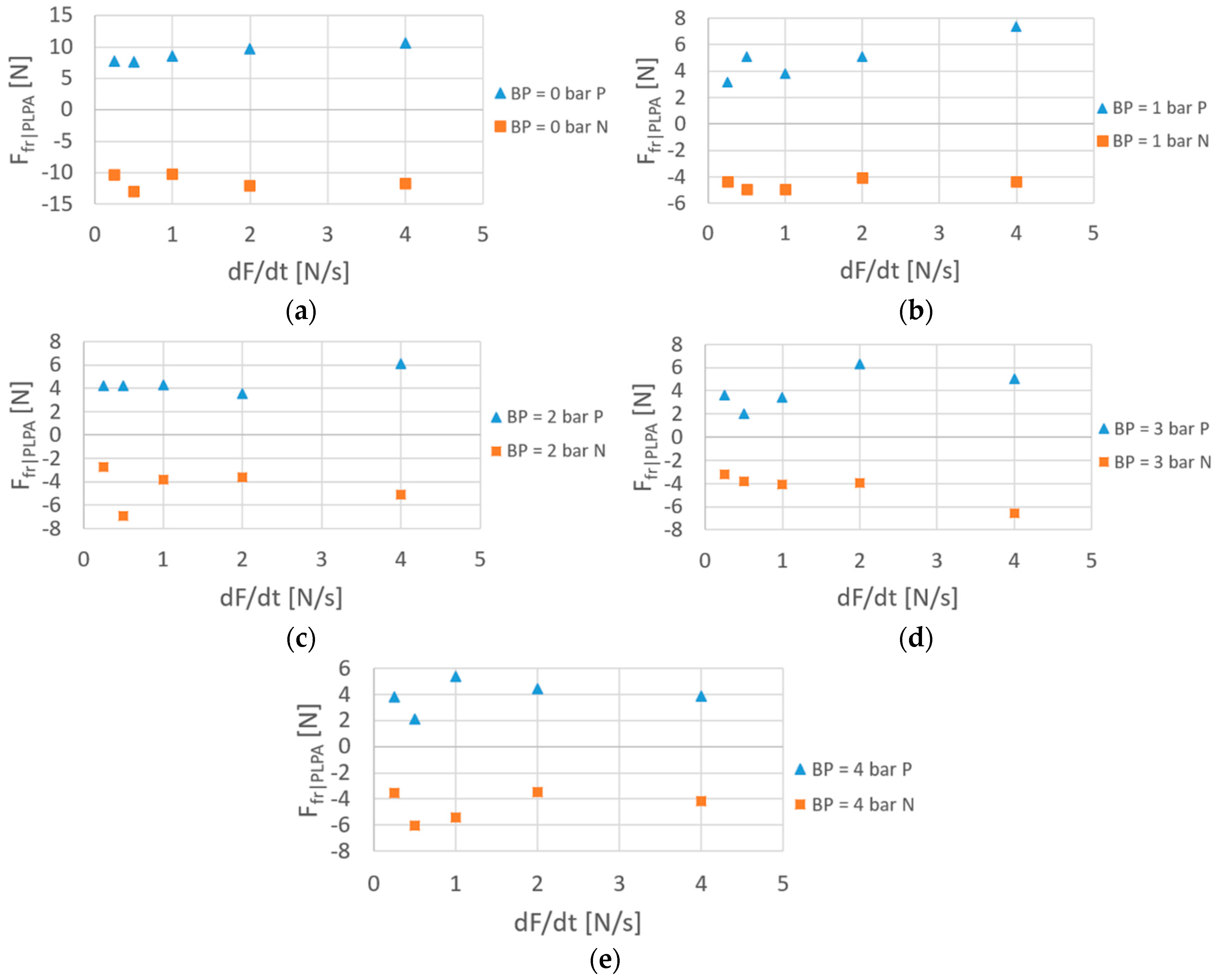
3.2. Friction Measurements
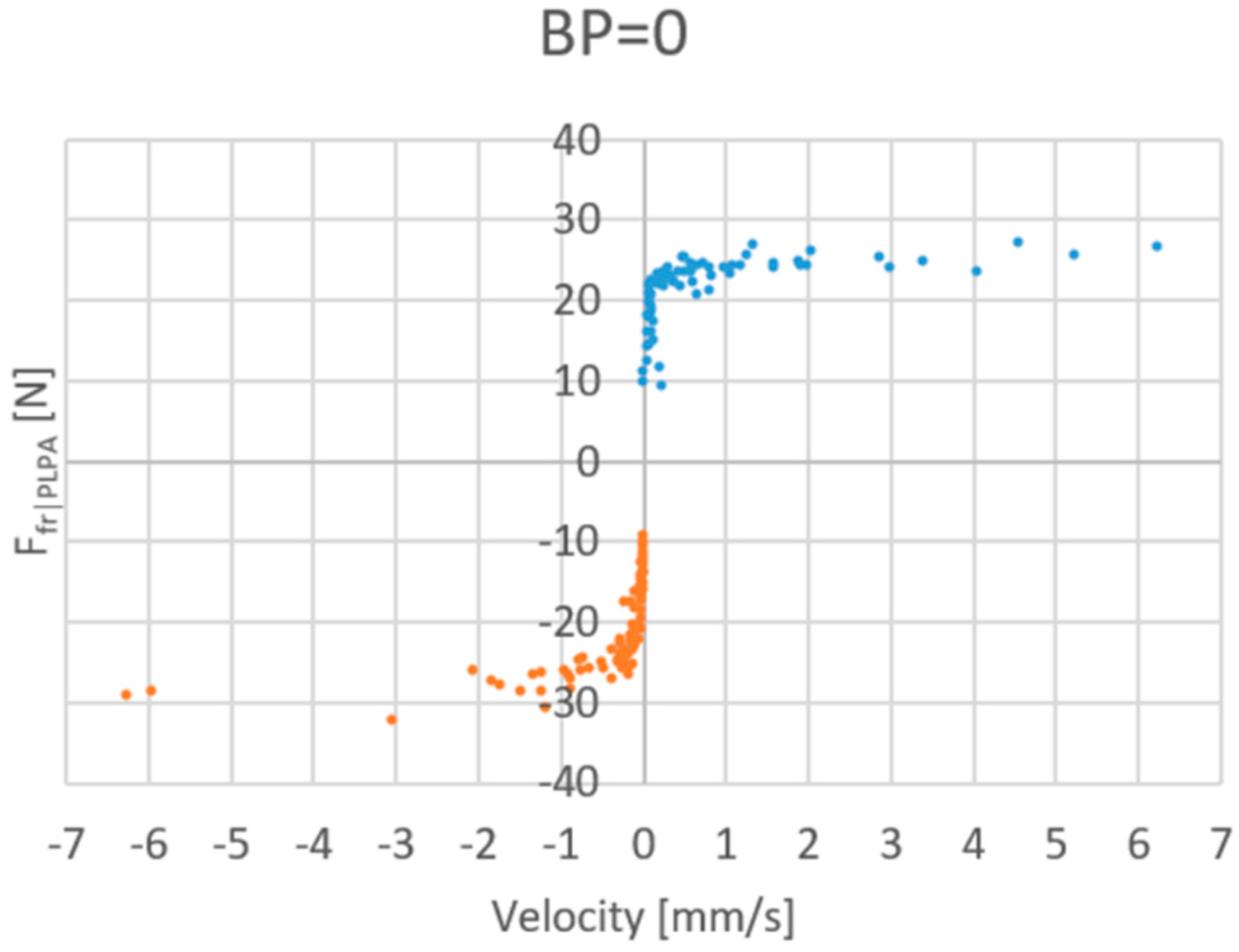
3.2.1. Static Friction
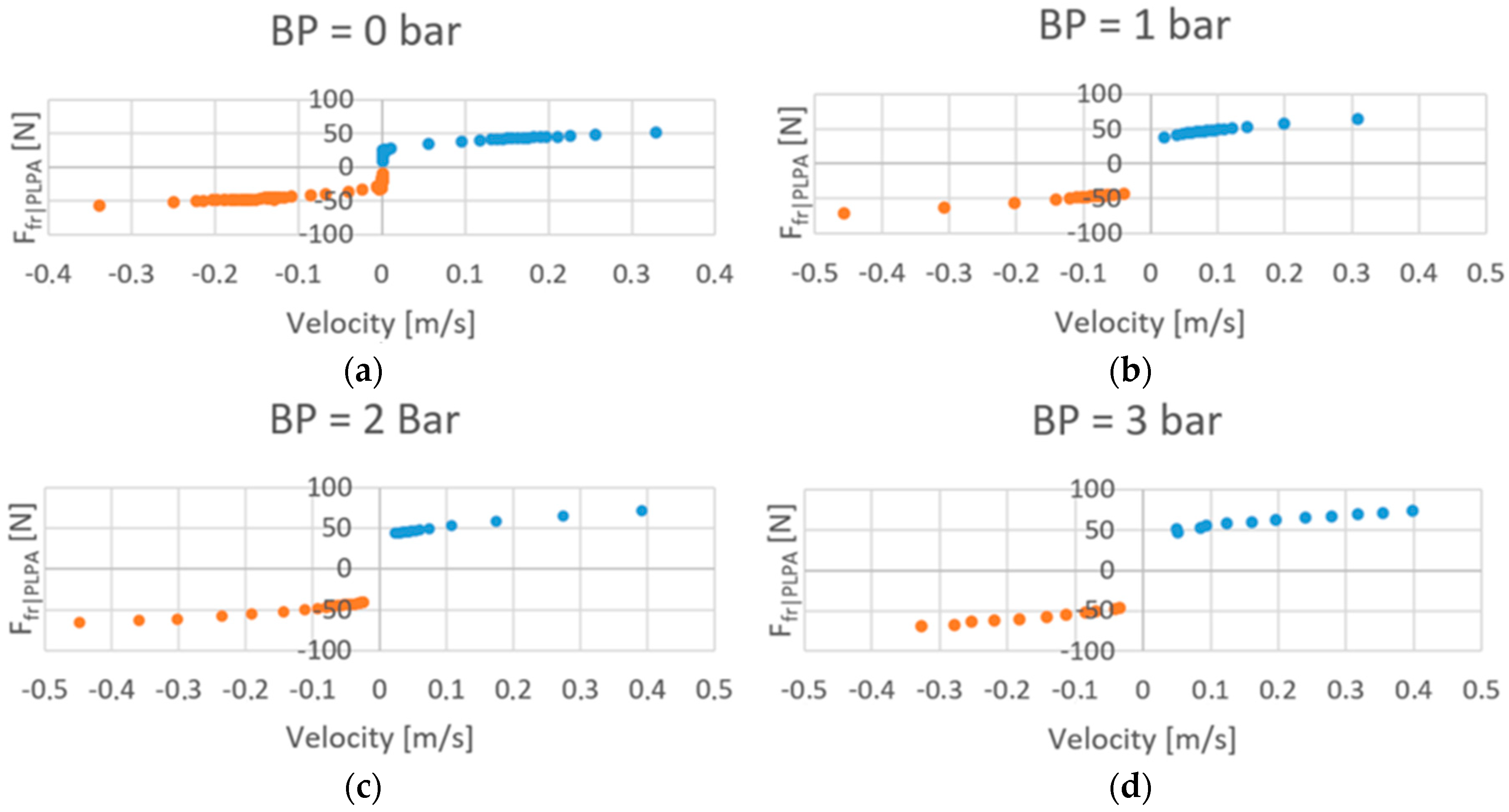
3.2.2. Viscous Friction
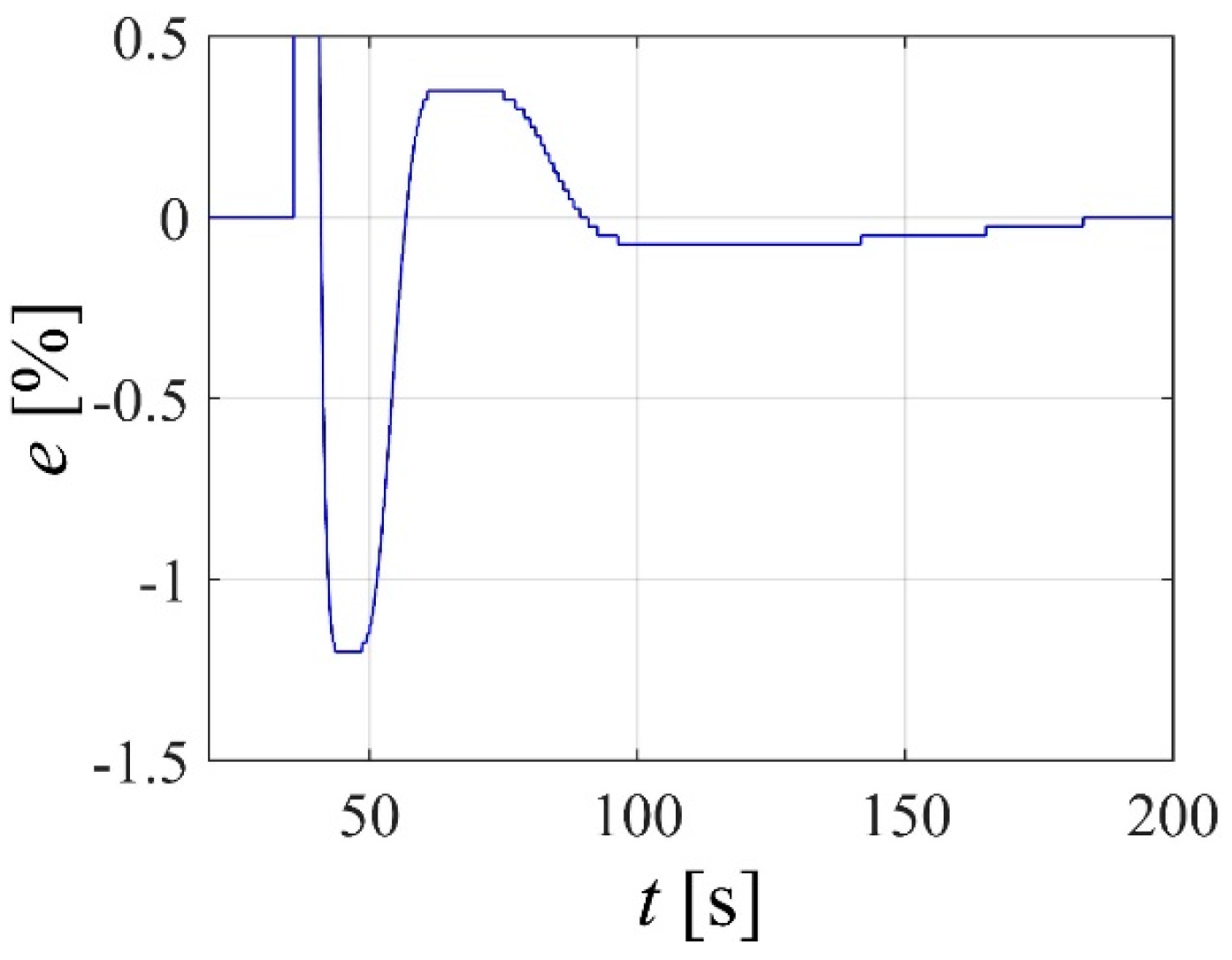
4. PID Type Control
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Carneiro, J.F.; Almeida, F.G. Accurate motion control of a servopneumatic system using integral sliding mode control. Int. J. Adv. Manuf. Technol. 2014, 77, 1533–1548. [Google Scholar] [CrossRef]
- Carneiro, J.F.; Almeida, F.G. Micro tracking and positioning using off-the-shelf servopneumatics. Robot. Comput. Integr. Manuf. 2014, 30, 244–255. [Google Scholar] [CrossRef]
- Carneiro, J.F.; Almeida, F.G. A macro-micro motion servopneumatic device. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2012, 226, 775–786. [Google Scholar] [CrossRef]
- Merkelbach, S.; Murrenhoff, I.H.; Fey, I.M.; Eßer, B. Pneumatic or electromechanical drives—A comparison regarding their exergy efficiency. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016. [Google Scholar]
- Gauchel, W.; Haag, S. Servopneumatic Clamping System for the Assembly of Battery Cells in the Area of Electromobility. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016. [Google Scholar]
- Pinto, J.B. Desenvolvimento de Controlador de Movimento para Cilindro Pneumático de Baixo Atrito. In Departamento de Engenharia Mecânica; Faculdade de Engenharia da Universidade do Porto: Porto, Portugal, 2017. [Google Scholar]
- Rakova, E.; Hepke, J.; Weber, J. EXonomy analysis for the Inter-domain comparison of electromechanical and pneumatic drives. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016. [Google Scholar]
- Li, S.; Vogt, D.M.; Bartlett, N.W.; Rus, D.; Wood, R.J. Tension Pistons: Amplifying Piston Force Using Fluid-Induced Tension in Flexible Materials. Adv. Funct. Mater. 2019, 29, 1901419. [Google Scholar] [CrossRef]
- Mirvakili, S.M.; Hunter, I.W. Artificial Muscles: Mechanisms, Applications, and Challenges. Adv. Mater. 2018, 30, 1704407. [Google Scholar] [CrossRef] [PubMed]
- Pillsbury, T.E.; Wereley, N.M.; Guan, Q. Comparison of contractile and extensile pneumatic artificial muscles. Smart Mater. Struct. 2017, 26, 095034. [Google Scholar] [CrossRef]
- Falcão Carneiro, J.; Gomes de Almeida, F. Experimental characteristics of a linear peristaltic actuator. In Proceedings of the IFK 2018, 11th International Fluid Power Conference, Aachen, Germany, 19–21 March 2018. [Google Scholar]
- Falcão Carneiro, J.; Gomes de Almeida, F. Friction characteristics and servo control of a linear peristaltic actuator. Int. J. Adv. Manuf. Technol. 2018, 96, 23. [Google Scholar]
- Carneiro, J.F.; de Almeida, F.G.; Pinto, J.B. Endurance tests of a linear peristaltic actuator. Int. J. Adv. Manuf. Technol. 2019, 100, 2103–2114. [Google Scholar] [CrossRef]
- Carneiro, J.F.; Almeida, F.G. Undesired oscillations in pneumatic systems. In Nonlinear Science and Complexity; Machado, J.A.T., Luo, A.C.J., Barbosa, R.S., Silva, M.F., Figueiredo, L.B., Eds.; Springer: London, UK, 2011; pp. 229–243. [Google Scholar]
- Carneiro, J.F.; Almeida, F.G. Reduced order thermodynamic models for servopneumatic actuator chambers. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2006, 220, 301–314. [Google Scholar] [CrossRef] [Green Version]
- Carneiro, J.F.; Almeida, F.G. Pneumatic servo valve models based on artificial neural networks. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2011, 225, 393–411. [Google Scholar]
- Carneiro, J.F.; Almeida, F.G. A Neural Network Based Nonlinear Model of a Servopneumatic System. Asme J. Dyn. Syst. Meas. Control 2012, 134, 024502. [Google Scholar] [CrossRef]
- Varga, Z.; Honkola, P.-K. Mathematical model of pneumatic proportional valve. J. Appl. Sci. Thermodyn. Fluid Mech. 2012, 1, 1. [Google Scholar]
- ISO 6358 Standard, Pneumatic Fluid Power—Components Using Compressible Fluids—Determination of Flow-Rate Characteristics; International Organization for Standardization: Geneva, Switzerland, 1989; p. 14.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Random Number Generators | Gaussian Distribution | Uniform Distribution |
|---|---|---|
| Seed | 251 | 0 |
| Sampling time [s] | 0.02 | 0.02 |
| Mean [V] | 0 | - |
| Variance [V2] | 0.25 | - |
| Minimum [V] | - | 0.6 |
| Maximum [V] | - | 1.5 |
| System Parameter | Value | Unit |
|---|---|---|
| 16.7 | [rad/s] | |
| 0.51 | - | |
| 0.82 | [m/(Vs)] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Falcão Carneiro, J.; Pinto, J.B.; Gomes de Almeida, F.; Fateri, M. Model and Experimental Characteristics of a Pneumatic Linear Peristaltic Actuator. Information 2020, 11, 76. https://doi.org/10.3390/info11020076
Falcão Carneiro J, Pinto JB, Gomes de Almeida F, Fateri M. Model and Experimental Characteristics of a Pneumatic Linear Peristaltic Actuator. Information. 2020; 11(2):76. https://doi.org/10.3390/info11020076
Chicago/Turabian StyleFalcão Carneiro, João, João Bravo Pinto, Fernando Gomes de Almeida, and Miranda Fateri. 2020. "Model and Experimental Characteristics of a Pneumatic Linear Peristaltic Actuator" Information 11, no. 2: 76. https://doi.org/10.3390/info11020076
APA StyleFalcão Carneiro, J., Pinto, J. B., Gomes de Almeida, F., & Fateri, M. (2020). Model and Experimental Characteristics of a Pneumatic Linear Peristaltic Actuator. Information, 11(2), 76. https://doi.org/10.3390/info11020076