Let us consider a simple example of modeling a system’s change due to its environmental change. The example consists of a system environment model, which produces possible vectors of states required by the environment and the probabilities (possibilities) for such vectors to be demanded (required) by the environment. One of these vectors shall be realized as a result of environment functioning. Such vectors and probabilities of their realization can be represented as random vectors. Each possible vector required by the system’s environmental states leads to a separate model of system functioning under changing conditions. It describes the functioning and changes of the system, including transition operations. Such functioning and system changes (transitions) correspond to the chosen vector of required states. Transition realization requires information operations. The system model allows the effects of operations to be estimated, including transition operations and information operations and their correspondence to environmental requirements, according to the chosen vector of required states. Such a measure is a probabilistic measure estimated for each required state of the vector and can be represented as a discrete vector of correspondences (each correspondence is an element of a vector of probabilistic measures). All possible measures of correspondence (for all required environmental vectors of states) can be represented as a multidimensional random vector or its characteristics — for example, mean, mode, and median. Such a random vector or its characteristics may serve as a system’s potential indicator. The indicator varies depending on the capabilities and technologies used to react to the system’s environmental changes. IT is one (and necessary required) among such technologies. A measure of the distance between a system’s potential indicator value for nondigital (“old”) IT used and digital (“new”) IT used as a result of digitalization can serve as a digitalization performance indicator.
Complex Technical System Functioning Model
The possible result of using the CTS model are sets
of possible CTS states
for
. In addition, the result of model use are measures
and possibilities
for CTS states
to be realized at
. Measures
for CTS environment requirements and CTS states correspond according to
at
, that is -
at the same moment
(
) when
is counted. Here “∼” shall take the form of one of the inequality/equality operations, i.e., “>,=,<” and their combinations. The example model
of the CTS is calculated for one vector
of required states and one set
of possible information operation characteristics from the set of possible characteristics of technological information operations
depending on one of
A IT used.
is taken from the set of possible sequences of states
, required by the environment. This vector is
in the example shown:
; It means that during the first information operation at moment
system functioning must be adapted (conversion of the system shall be performed) to achieve goal
. Next, at moment
conversion of the system shall be performed to achieve goal
. The system will stop functioning at moment
. Because
q varies, a separate CTS and its functioning model are built for each
q but only one model is considered in the example. We need all models (
). Furthermore, we need to measure
depending on the possible IT characteristics used to perform
and so depending on this information, technological operations characteristics are used to create appropriate prescriptions for conversion and further target operations. These IT characteristics are
. Depending on
and
different models
are built, and as a result, different
are realized. So once all these models are built, we will add
q and
a indexes to the results of the modeling and will get a multidimensional array (tensor)
which allows obtaining
for each
in
and
in
:
Dimensions of (
1) are evaluated based on computations of partial network fragment states. The computations are made based on the functional dependencies between the states caused by the execution of network operations. They can be represented as, for example, computation graphs allowing the computation of the dimensions of (
1). The example of a complex technical system’s model used to estimate (
1) is shown in
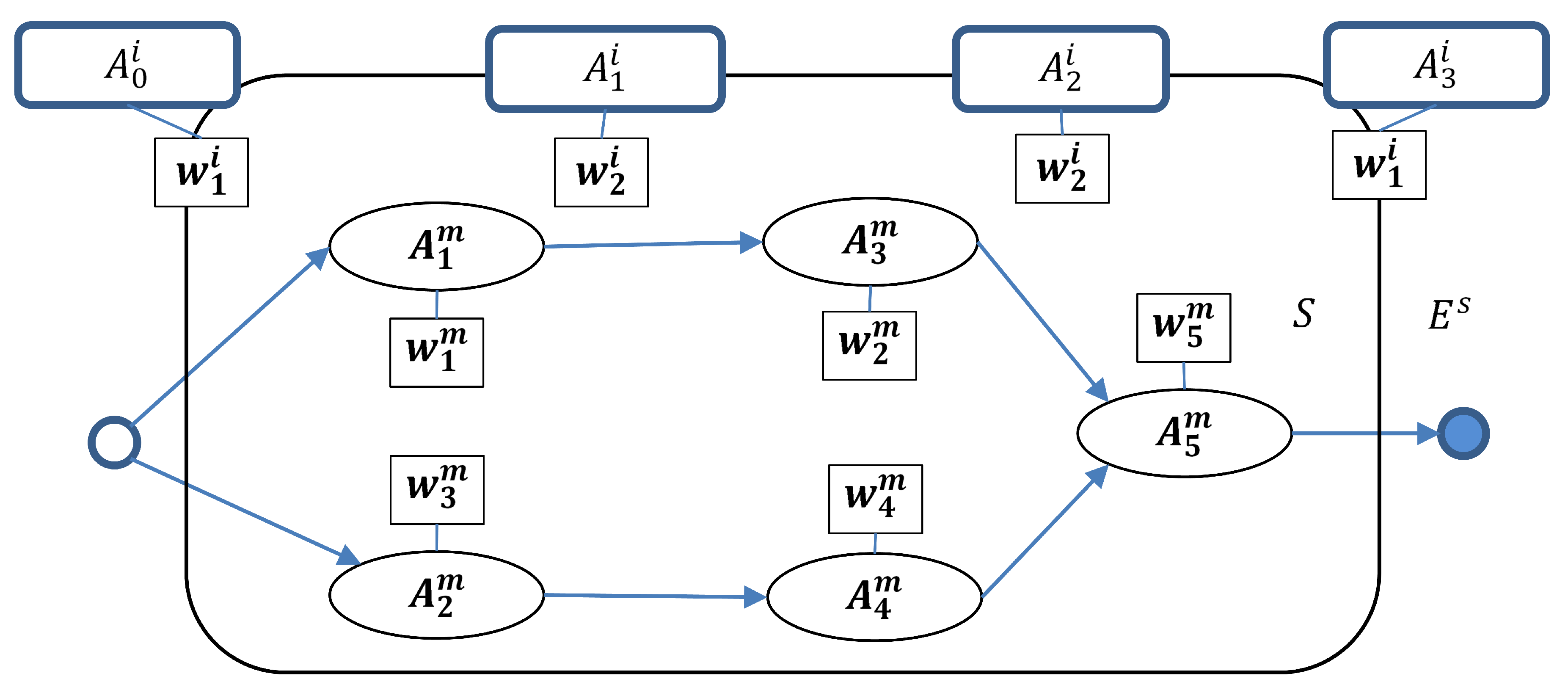
Figure 1.
In this Figure,
are workplaces to perform the technological noninformation operations (TNIO or material technological operations);
are workplaces to perform technological information operations (TIO);
are technological noninformation operations;
are technological information operations;
S is the system;
is the environment of the system; and
is a random value
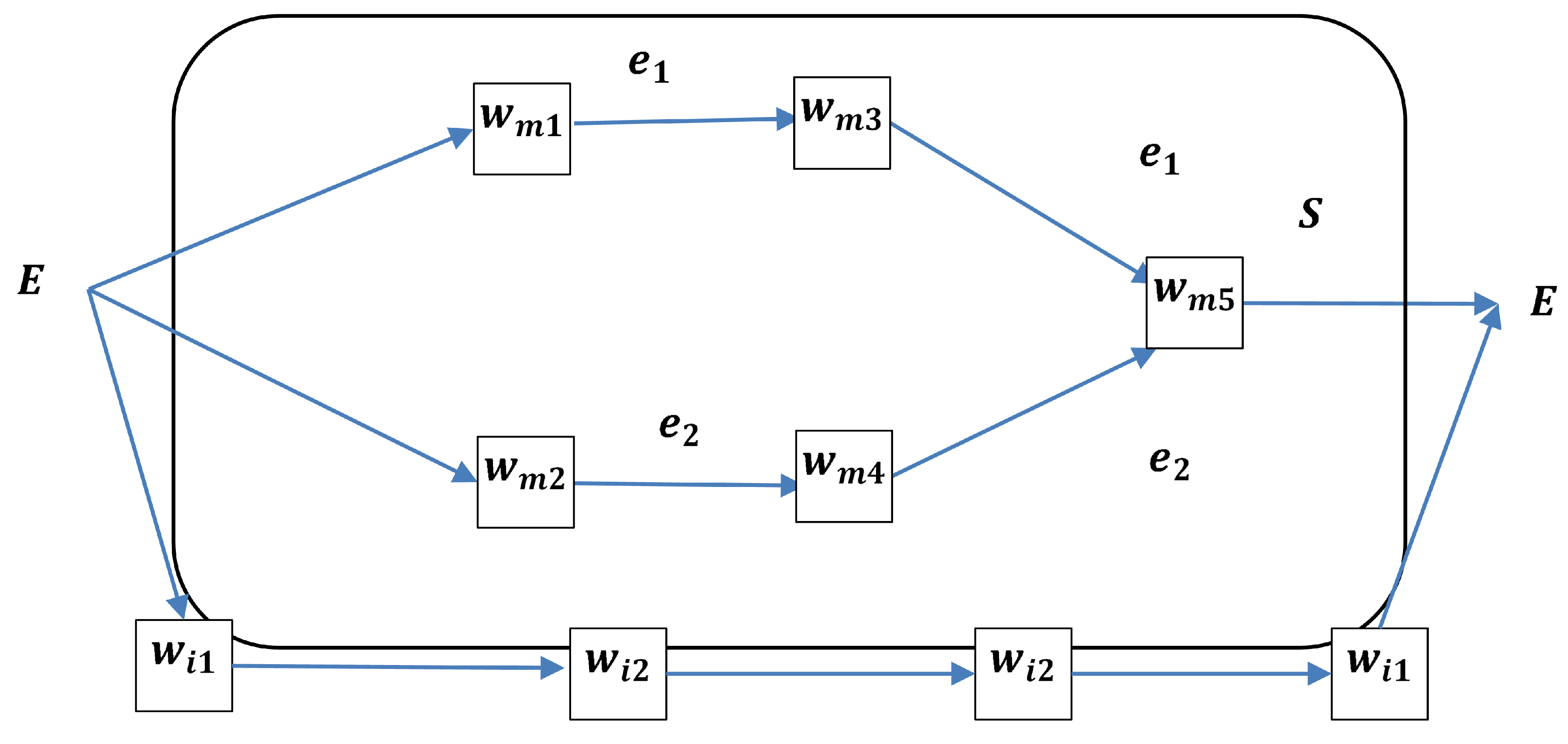
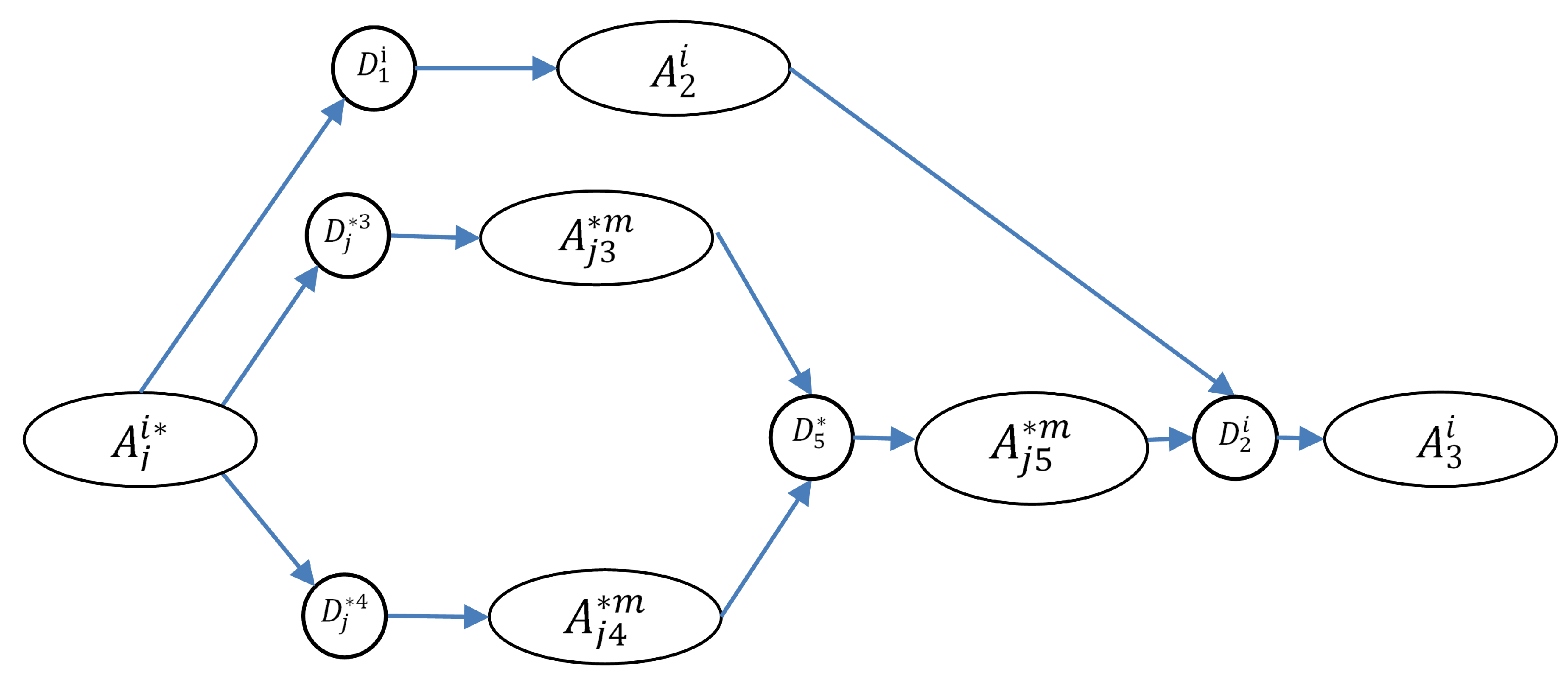
t. Routes used to move elements through CTS’s workplaces are shown in
Figure 2. In the example routes are similar to the technological operations sequences because of one technological operation allowed on each workplace.
The parameters of the information technological operations (designated by the upper index
i), are characterized by the left and right margins of the respective random values, so they represented as vectors of random values parameters:
The calendar schedule of the technological noninformation operations has a matrix form:
Here,
is the calendar moment of the
beginning. The technological route shown in
Figure 2 has the form of one information route
and two noninformation route chains: The route chain
is to produce and assemble part 1, and the route chain
is to produce and assemble part 2. The parts are assembled at workplace number 5 (
). The required states of the
sequence, for which the complex technical system model was built, are as follows:
the initial state checked at
- first state checked at
After checking, the goal is changed to
, so the planned conversion and the required states are changed accordingly.
is the second state checked at
After checking, the goal is changed to
, and the planned conversion and the required states are changed accordingly.
is the third state checked at
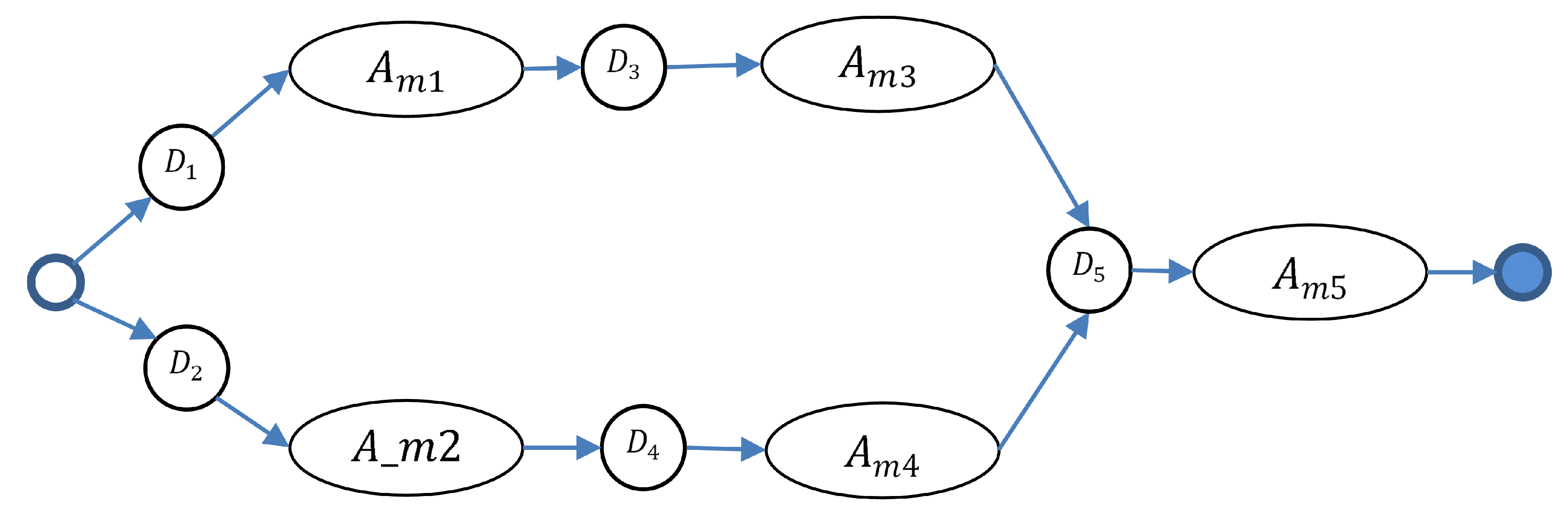
A network of technological noninformation (material) operations with delays is shown in
Figure 3.
This is a typical representation of operations—for example, for project management—but expanded. More precisely, the model of CTS functioning is expanded with the use of waiting operations
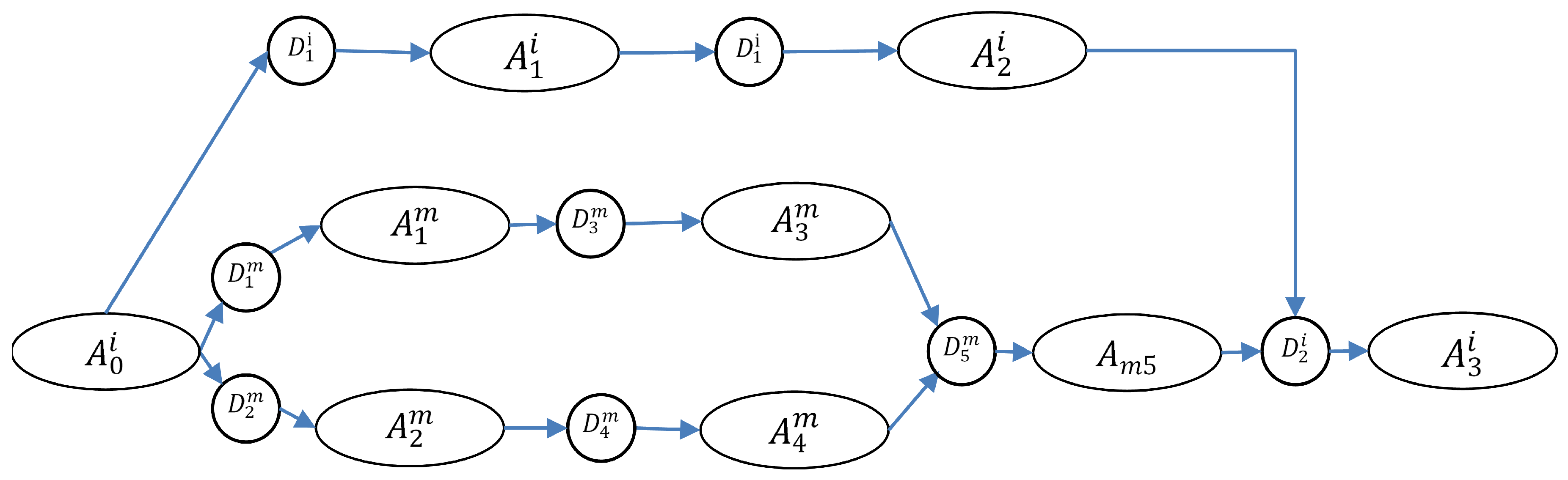
. Waiting operations are used, particularly, to account for calendar plan fulfillment and to represent possible waits (delays) and states of workplaces during each moment of CTS functioning. Next, this model is expanded with a chain of technological information operations in the network specified. The technological information operations are performed in workplaces
. Workplace
is used to receive and send reports from/to the environment and is not capable of altering CTS functioning, but workplace
is capable of altering CTS functioning and is not used to receive/send reports to/from the environment. A network of technological information and noninformation operations with waits is shown in
Figure 4.
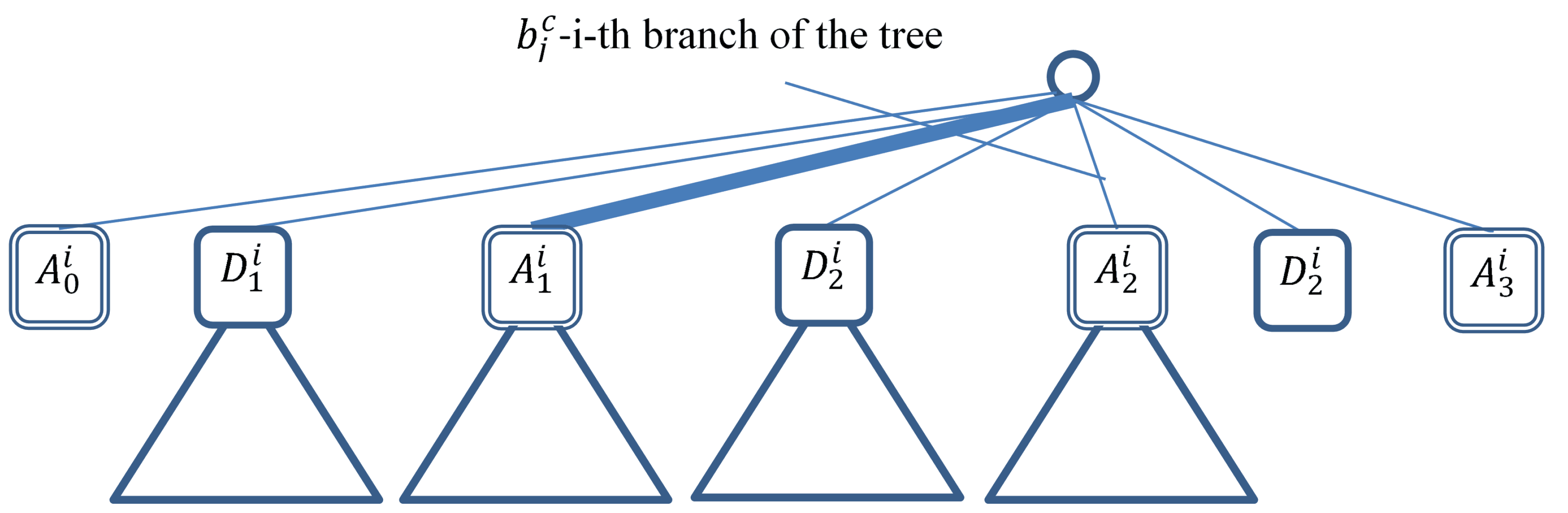
The CTS model created allows the specification of
which is the fixed set of possible CTS states under condition vector
of states, required by the CTS environment at
. Each CTS state is associated with the
th branch at tree
of possible branches of simultaneously performing technological operations. It is created for fixed
. Each branch
is associated with a set of
U information and noninformation technological operations and waits for operations,
, each one performed (or delayed) at workplace
. This allows the computation of the states of CTS, which correspond to
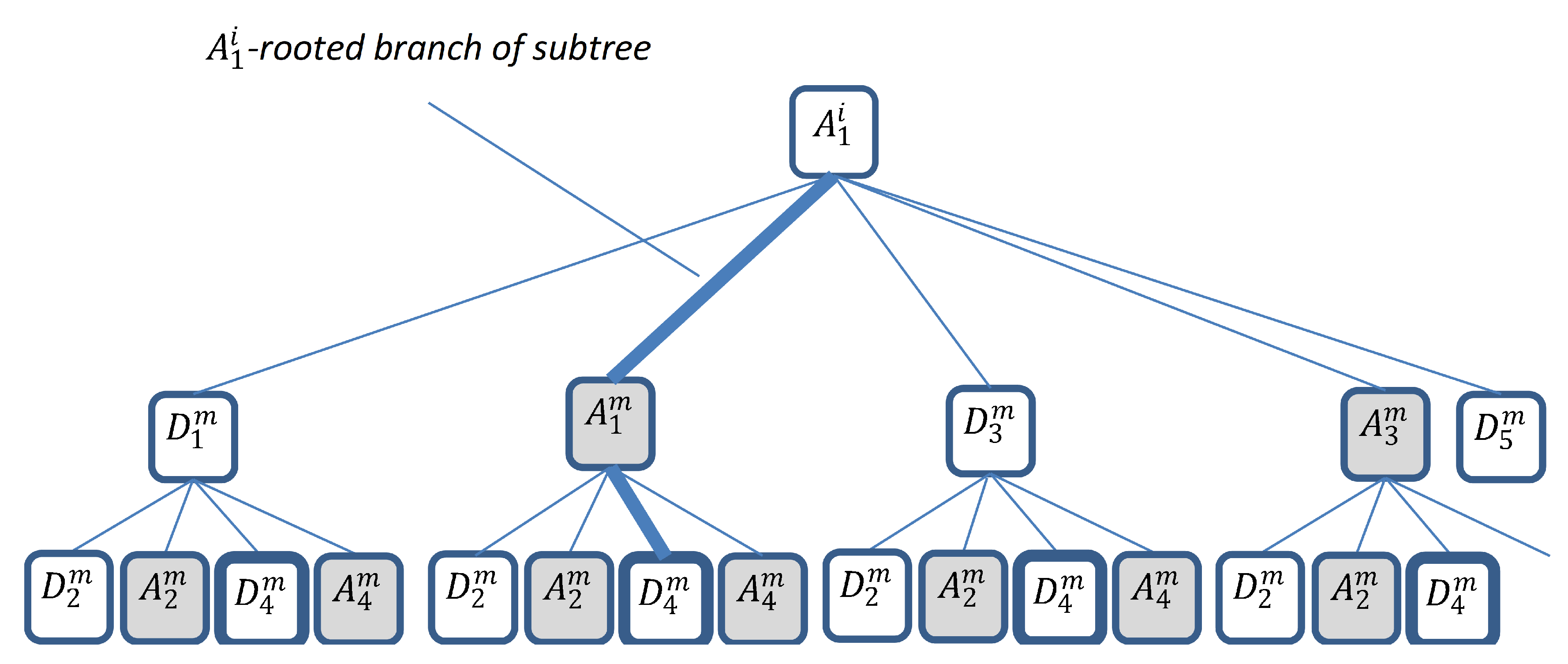
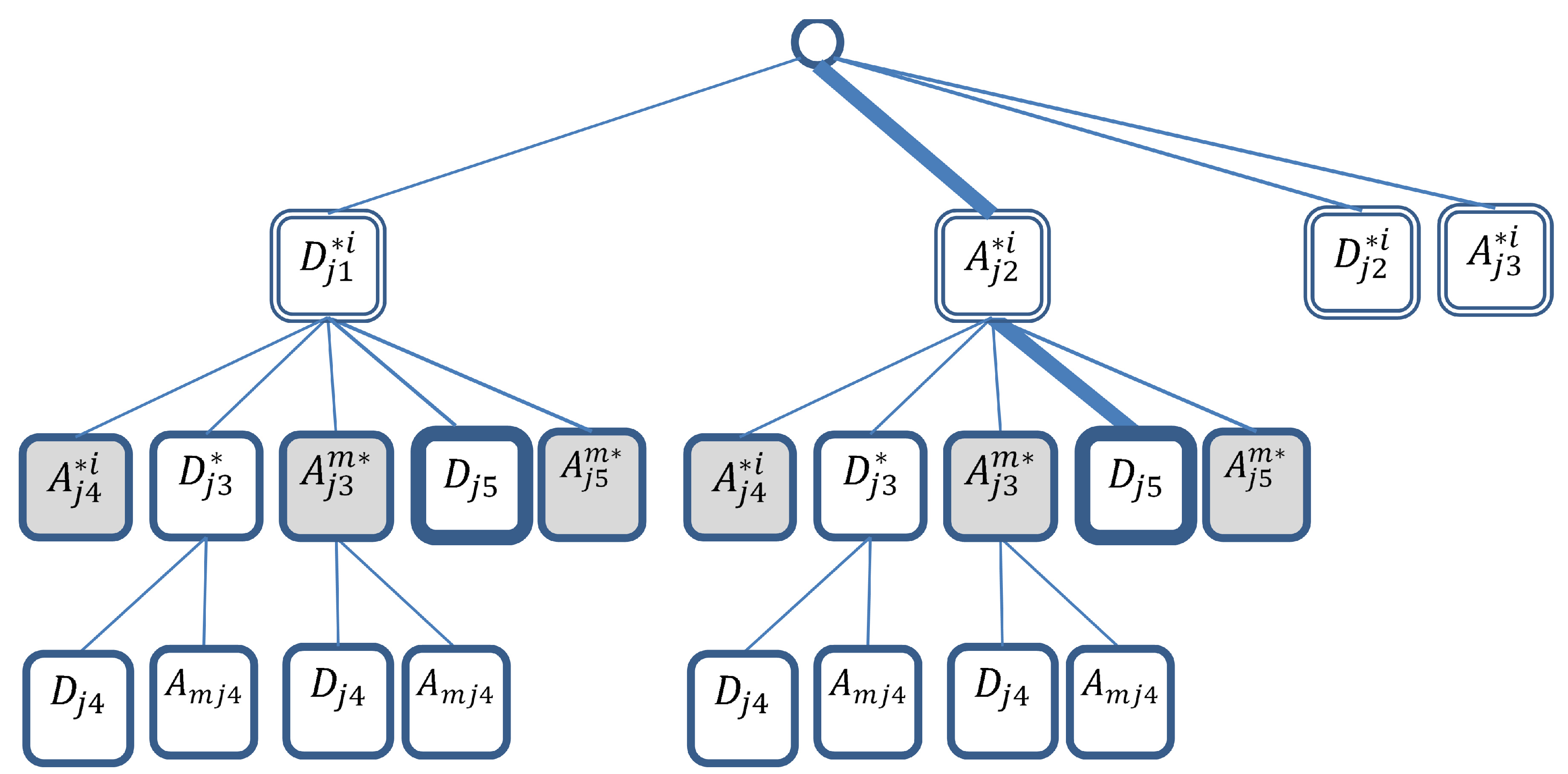
Such a tree
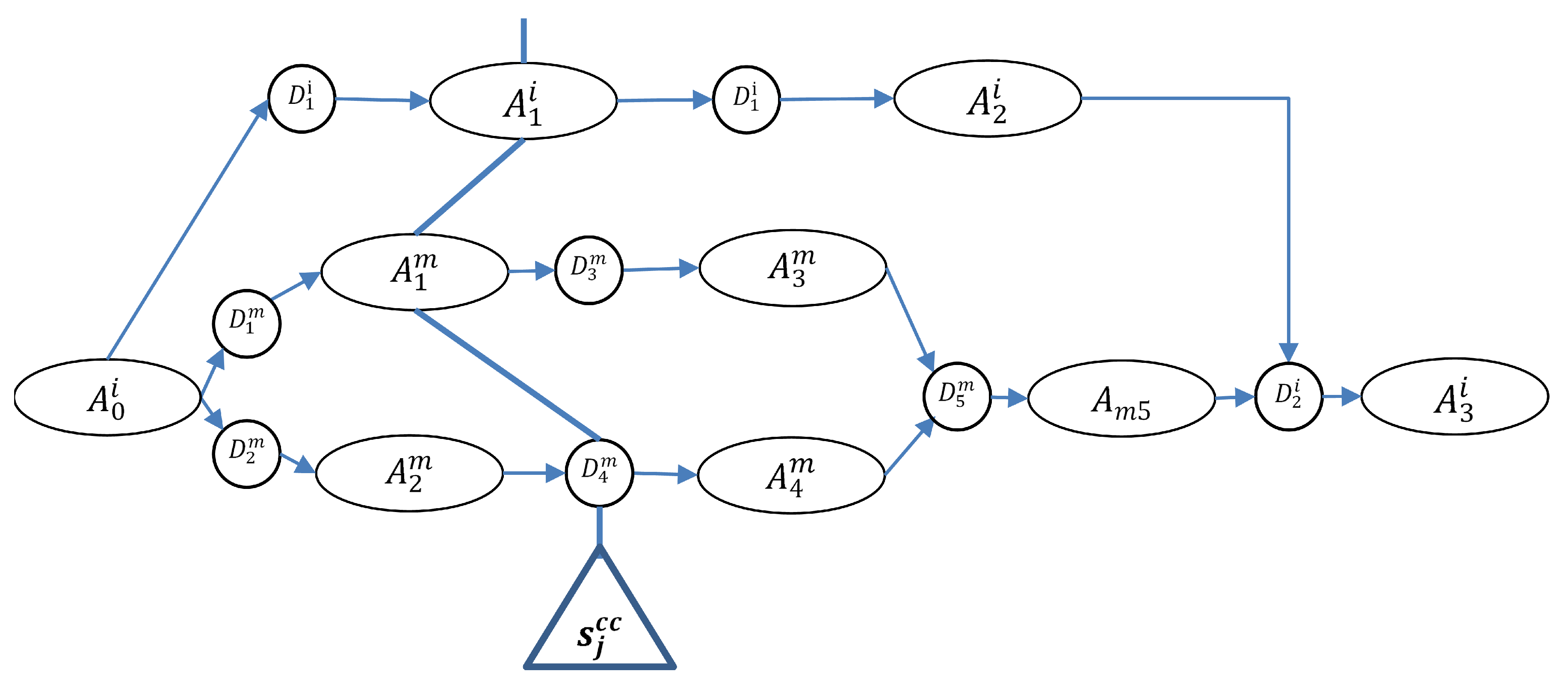
fragment is shown in
Figure 5. The fragment is built under the condition that the technological information operation is performed. Other fragments have the same structure and correspond to cases in which other technological information operations are performed. As a result, a complex tree is built based on its fragments formed. It is shown in
Figure 6.
The trees built allow the specification and subsequent computation of the possible states of CTS during its functioning to reach the requirements specified by
. The computation is performed based on the ability to form states of CTS based on the states of
Let us designate such a state of CTS as
Furthermore, the models of possible states allow us to generate correct conversion technological operations and further technological operations in case the requirements were changed. More precisely, the conversion operations depend on state
and the states required by the environment when CTS is in this state. One partial state of the example of a partial tree is shown in bold in
Figure 5. The corresponding complex tree (built with partial ones) is shown in
Figure 6. The example state corresponds to the implementation of the
wait and
operation at the start of checking the compliance of the system with the environmental states and the
wait to start
technological noninformation operation. In this case, the conversion measures consist of bringing workplace
to its original state and then to execute the conversion (readjustment) of
to reach the new requirements according to the new goal
. For
, it is necessary to perform a readjustment. The information technological operation
for the purpose of conversion must return as a result of information about the network of conversion technological operations to perform and a calendar plan for their implementation, as well as a network of further technological operations to reach
(“target” operations) and a calendar plan for their implementation. Such a situation of alternating functioning due to environmental change, corresponding information operation results, and further conversion and a target operation start is named cutting. An example is shown in
Figure 7.
For simplicity, conversion technological operations cannot be interrupted. In addition, it is supposed that before a new network of operations will be performed, all conversion operations shall end. After the information technological operation
has finished and the required information obtained the conversion, target operations should start on the third and fourth workplaces according to the specified calendar plan. These target technological operations can also be interrupted when the next state check is performed at
. The corresponding example of conversion technological operations is shown in
Figure 8. They end with technological information operation
which checks a new state of workplaces and starts “target” technological operations. The corresponding network of technological information and noninformation operations with waits is shown in
Figure 9. Please note that this network is generated under a few conditions: first, under the condition of
fixed with
and
, next, under the condition of
fixed; as a result,
is fixed, which is built for
and so under the condition of
the
characteristics are fixed. This fixation causes an appropriate
and, next, networks of conversion and target technological operations.
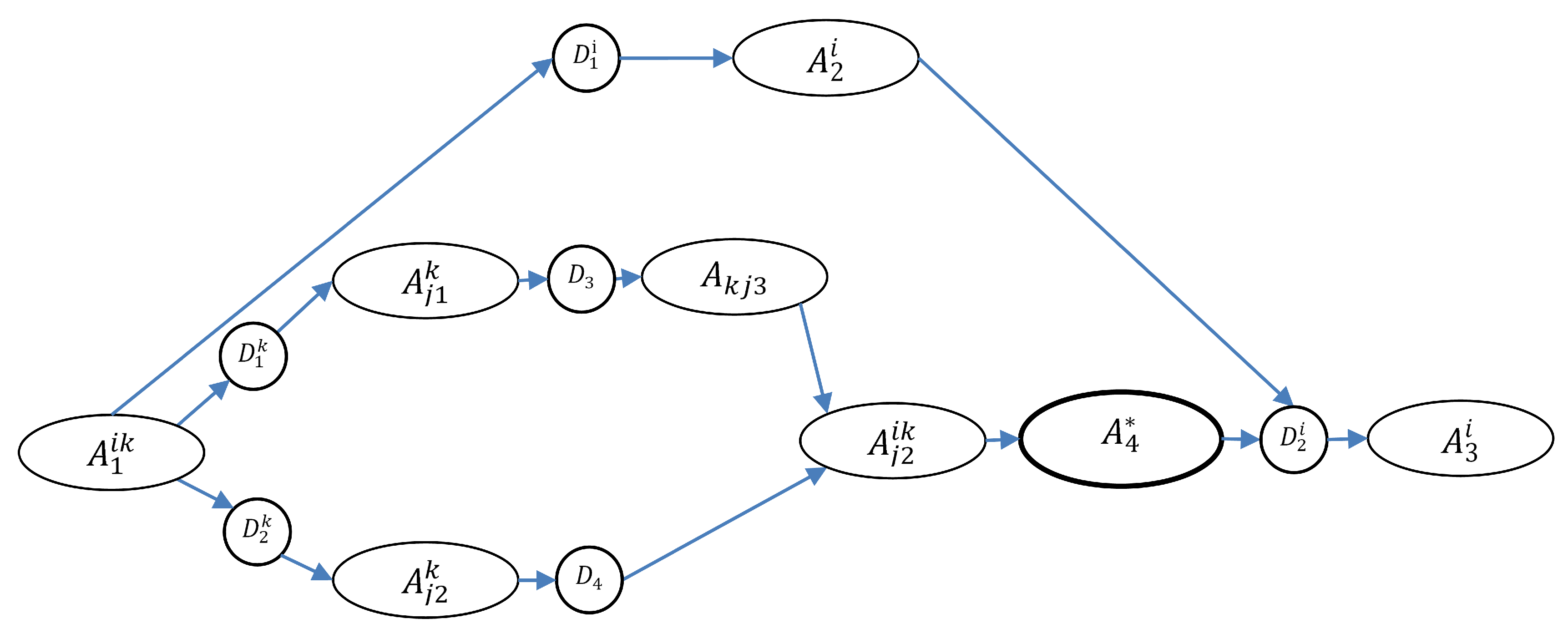
The fulfillment of the new target network of technological operations, according to the required states
is interrupted again at
. Let us consider an example corresponding to the implementation of the CTS state
from the set of possible states
. Such states are again obtained by the same routine to build an appropriate tree of possible technological operations and waits at CTS functioning after the interruption in specified conditions of the CTS environment
and after the technological information operation with characteristics defined by the specified IT
. The set of possible states is determined by such operation results, i.e., these are prescriptions (plans, orders) assigned for execution when
has finished, which depends on the state of CTS during the performing of technological information operations. So, the states of CTS during alternated functioning depend on the previous states of the CTS, as well as on the states of the environment. The appropriate tree of possible branches of simultaneously performing technological operations after the first interruption is shown in
Figure 10.
The example case of the second interruption at
(shown in bold) corresponds to the implementation (at moment
when the system and environmental states are checked for compliance) of the following technological operations: waiting
for the start of the assembly of the
technological operation (the last technological noninformation operation in the calendar plan). It is assumed that in this case, conversion technological operations are not needed; i.e., the set of conversion technological operations is empty. That is because the technological operation on the fifth workplace
has not started yet, and the remaining places have already been restored to their original state. Therefore,
are supposed to be no longer needed to achieve the new goal
. In this case, the information operation
for the purpose of conversion should immediately return an empty set after its start; next, it shall call the information operation
which prepares the beginning of the target technological operations. The
information operation should end immediately (since the state did not change), and the
(new, according to goal
) product assembly technological operation should start (probably, with wait
) on the fifth workplace
. It is assumed that this technological operation is no longer interrupted. After it has completed the final information technological operation
it starts without waiting. The appropriate (final) network of technological operations is shown in
Figure 11.
As a result, of the series of conditional states and their changes due to the effects of information and noninformation technological operations, i.e., random moments
of the realization of states
, the costs
) spent to realize states
and the numbers
of the parts produced can be computed. Next, the
random variables and the random vector
of the produced items can be computed for each CTS functioning, represented by
. Such a computation is made based on the assumption that
are distributed according to a beta distribution and that
distributed is distributed according to a binomial distribution. It is further assumed that for large enough networks, the distribution of the resulting effects form a Gauss distribution for
and a binomial distribution for
. As a result, the
values can be computed. A pair of models,
is obtained. Next, based on this pair of models, the model
of CTS states and states of its environmental correspondence is created. It depends on the functioning of the CTS environment according to
and IT
used. The number of such pairs corresponds to
. Next, a multidimensional array (
1) of
values can be evaluated. The values of
are determined by the model of the CTS environment. It is worth noticing that the environment model may vary for the IT used and the type of environments (e.g., combat environments, information attack environments, supportive environments), but that is not modeled in this example. This model as a multidimensional array can serve as a comprehensive indicator of the CTS potential regarding the IT
used. This array, in fact, sets a multidimensional discrete random vector distribution. The vector elements are probabilities
of the compliance of the random effects with the changing requirements of the CTS environment. Furthermore, this discrete random vector distribution may solve the comprehensive indicator of capabilities, organizational capabilities, and dynamic capabilities of the CTS. However, to solve the practical problems of CTS potential research based on mathematical models (e.g., mathematical programming or operation research models), scalar indicator preferable. It is possible to use many or a few characteristics of this multidimensional discrete random vector or some kind of probabilistic mix as a scalar CTS potential indicator
as a function of IT
. For example,
where
in (
2) are taken from
in (
1). Alternatively, the CTS potential indicator
can be computed as guaranteed (pessimistic) value:
In any case, information technology
performance indicator
can be compared to a basic—for example, not digital—IT
and can be estimated as a difference:
Equations (
1)–(
4) can be used, similarly, to estimate indicators of capabilities, organizational capabilities, and dynamic capabilities for CTS functioning in changing environments.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










