On the Performance of Battery-Assisted PS-SWIPT Enabled DF Relaying



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The static PS scheme for the battery-assisted SWIPT DF relaying is studied. In particular, for a given static PS ratio, we derive the expressions of the outage and ergodic capacities based on the statistical CSI. Using the derived results, we can determine the optimal static PS ratios that maximize the outage and ergodic capacities, respectively.
- We develop a dynamic PS scheme for the battery-assisted SWIPT DF relaying. We first derive the optimal dynamic PS ratio to maximize the outage and ergodic capacities simultaneously at each transmission slot. Using the optimal dynamic PS ratio, the expressions for the maximum outage and ergodic capacities are obtained.
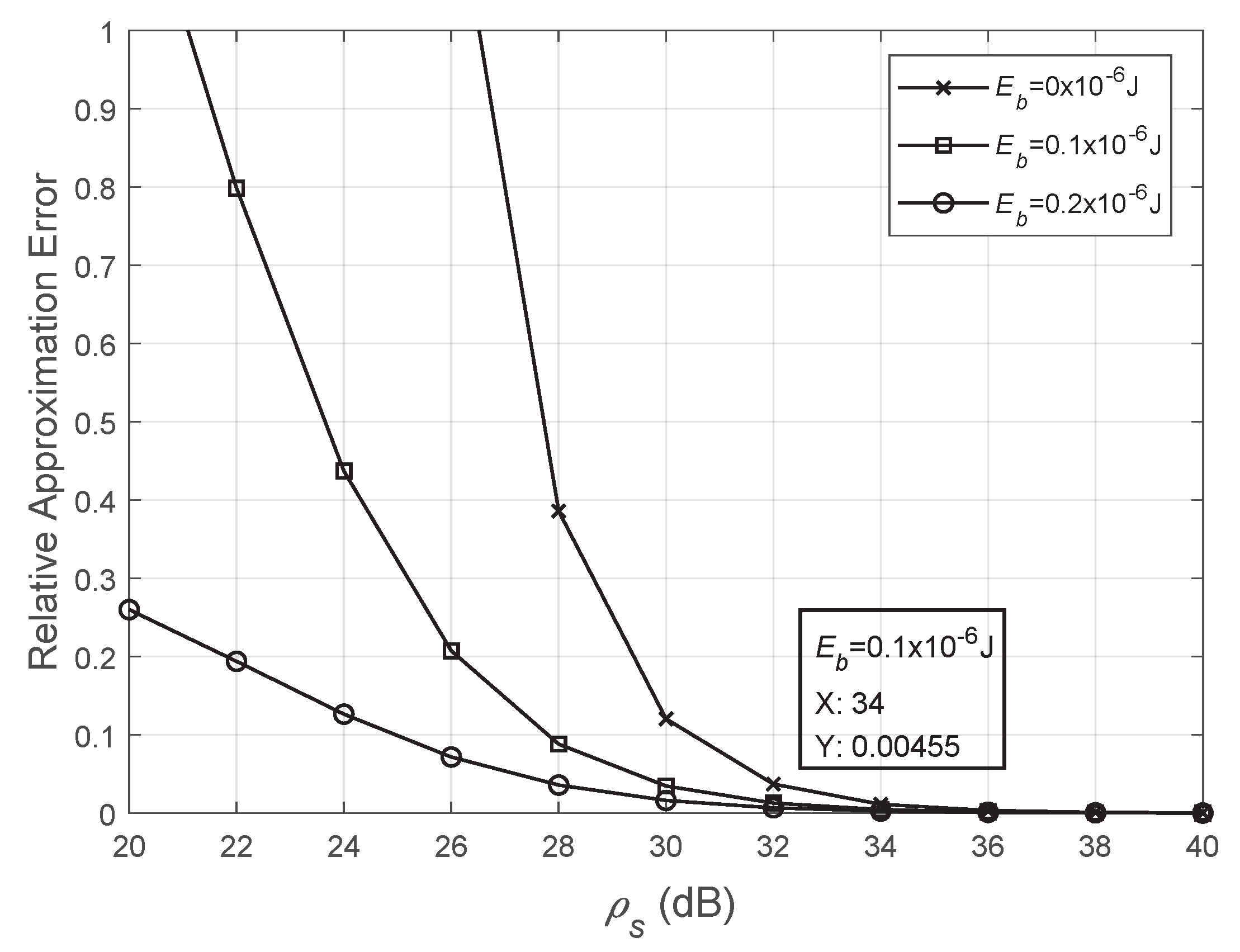
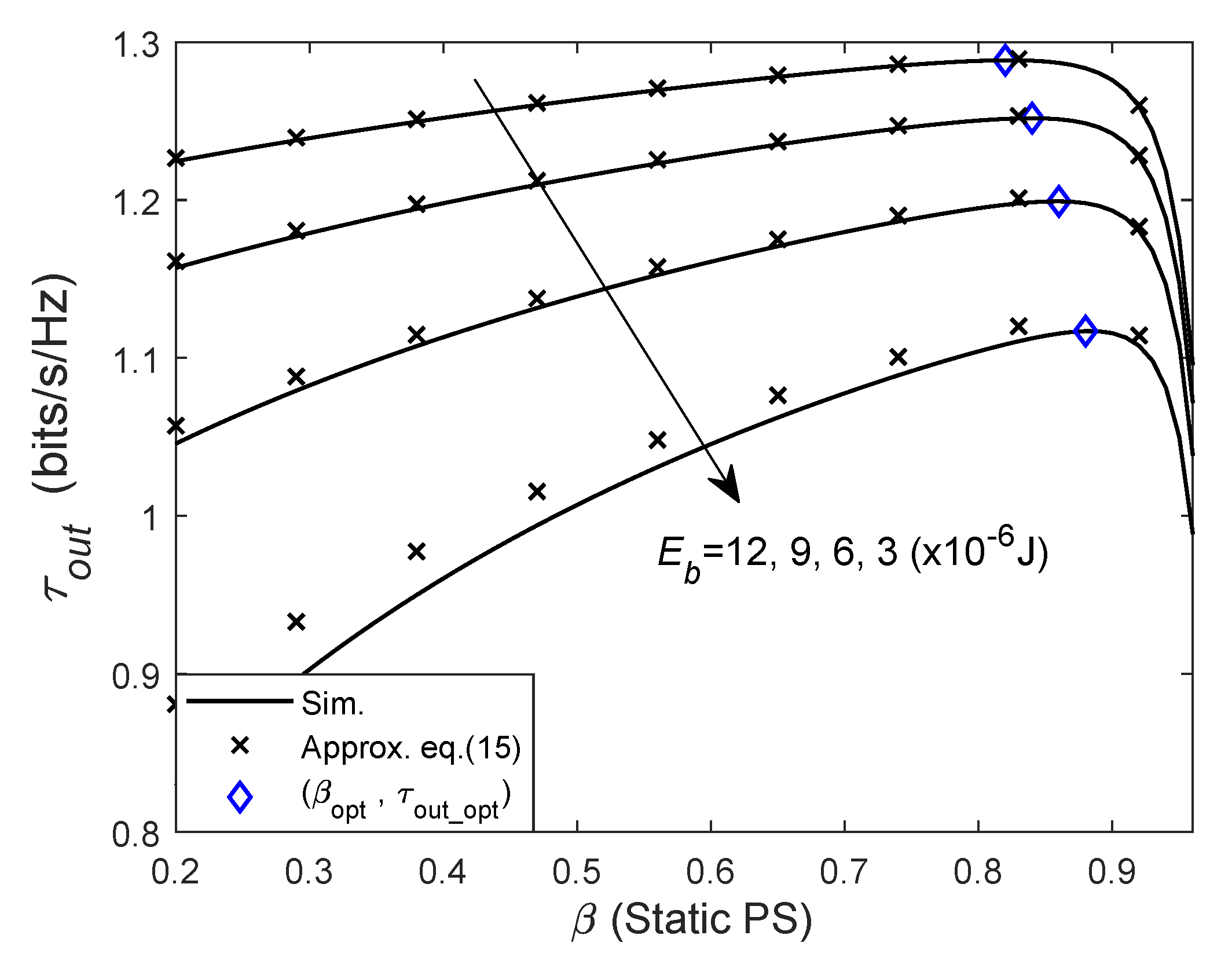
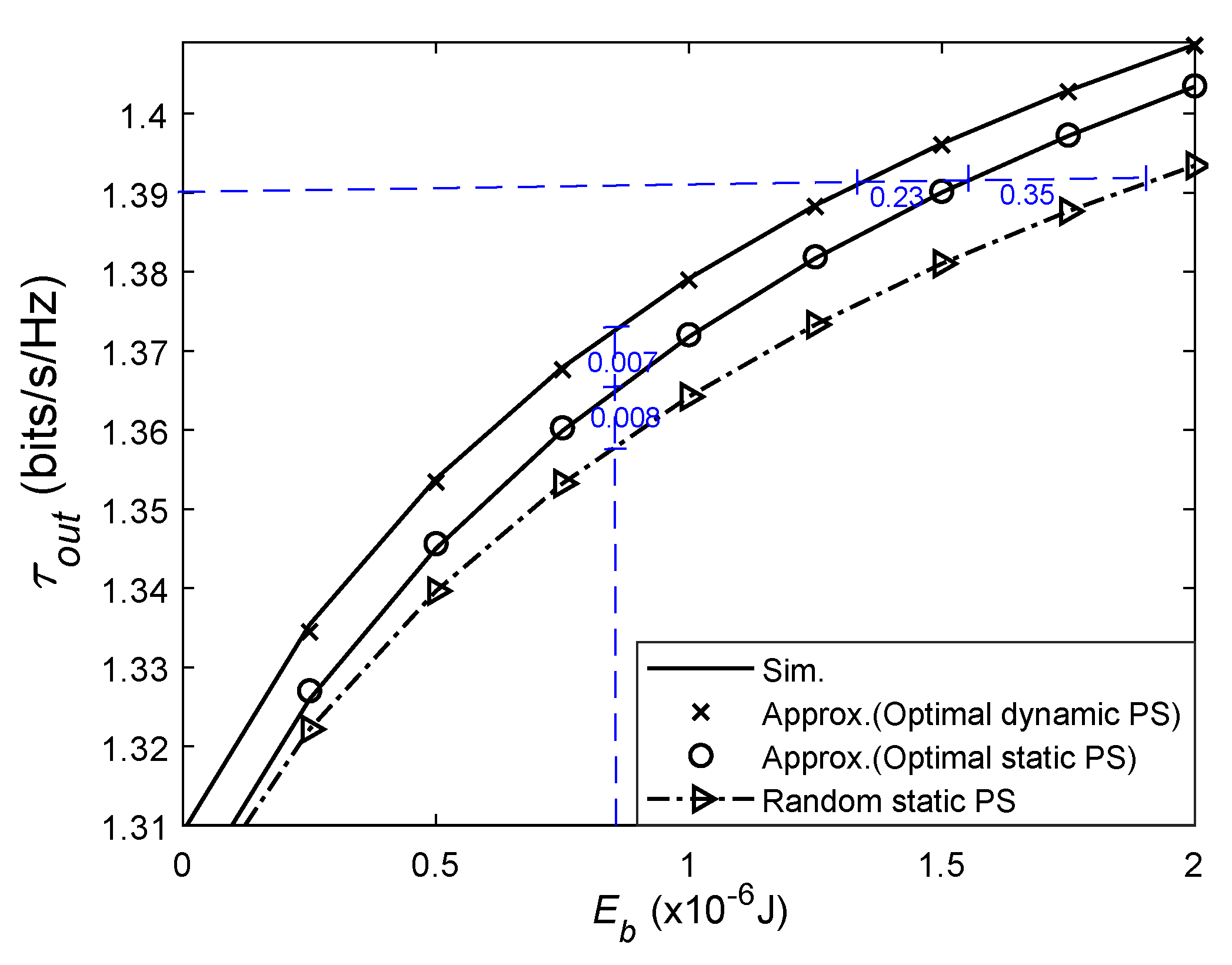
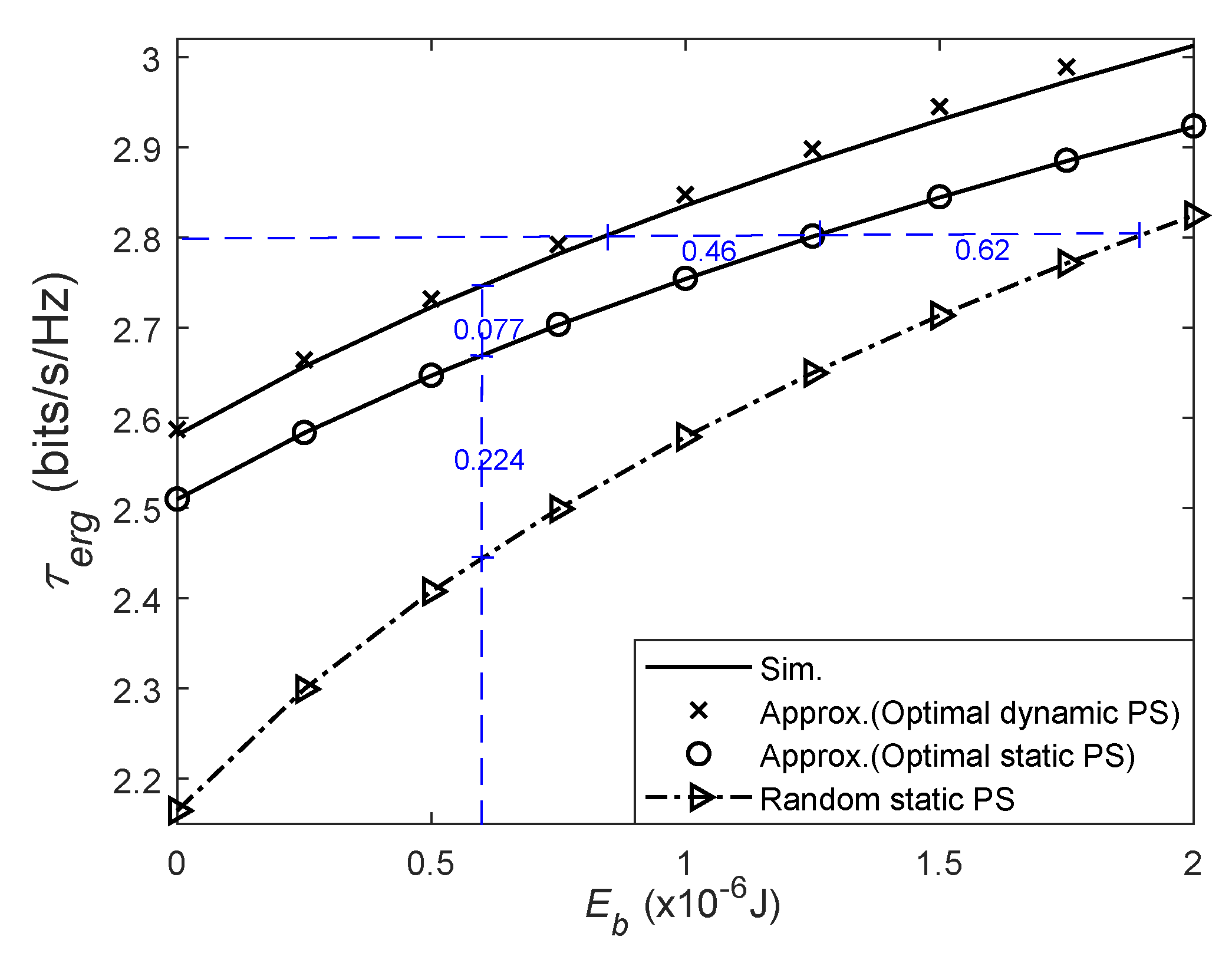
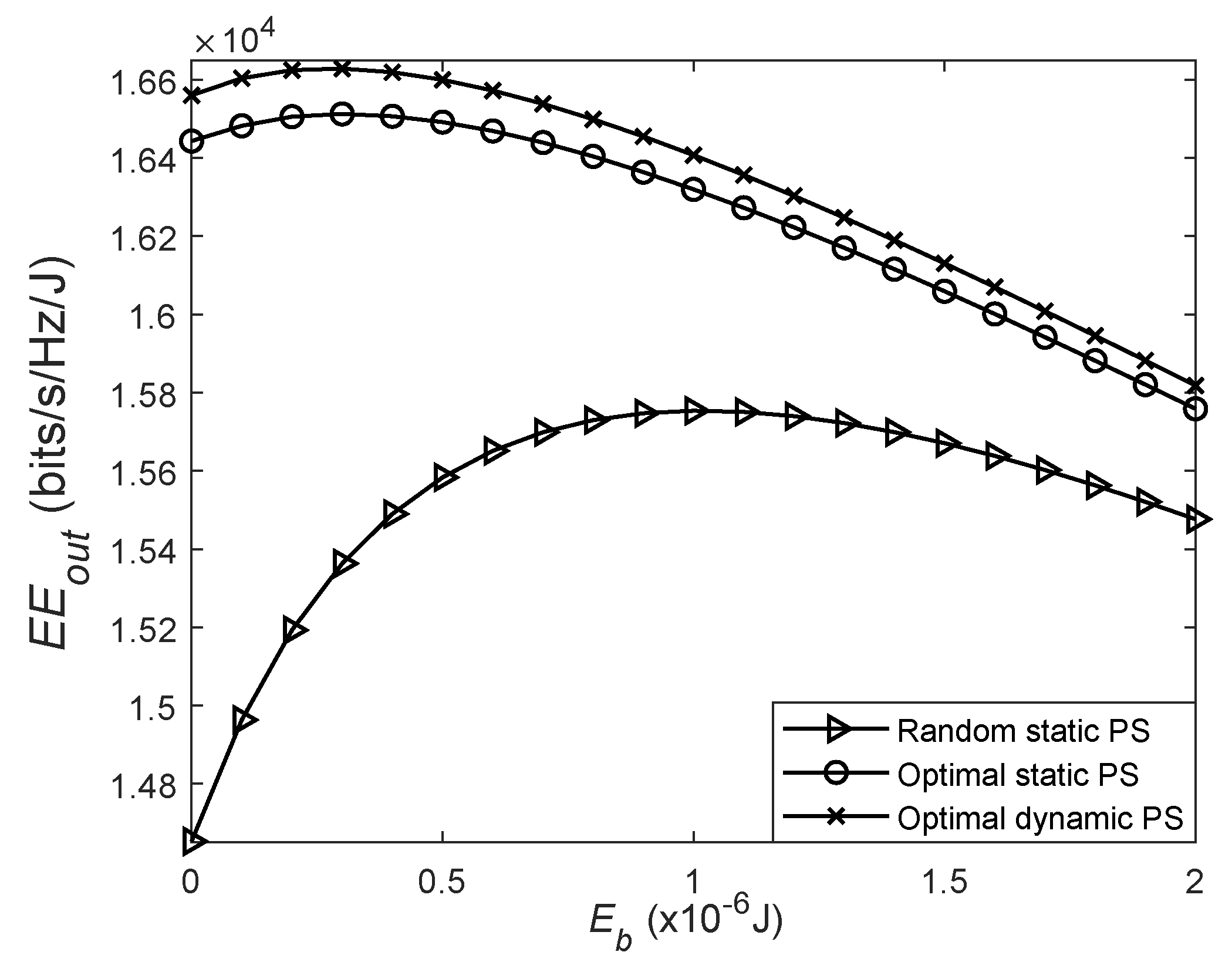
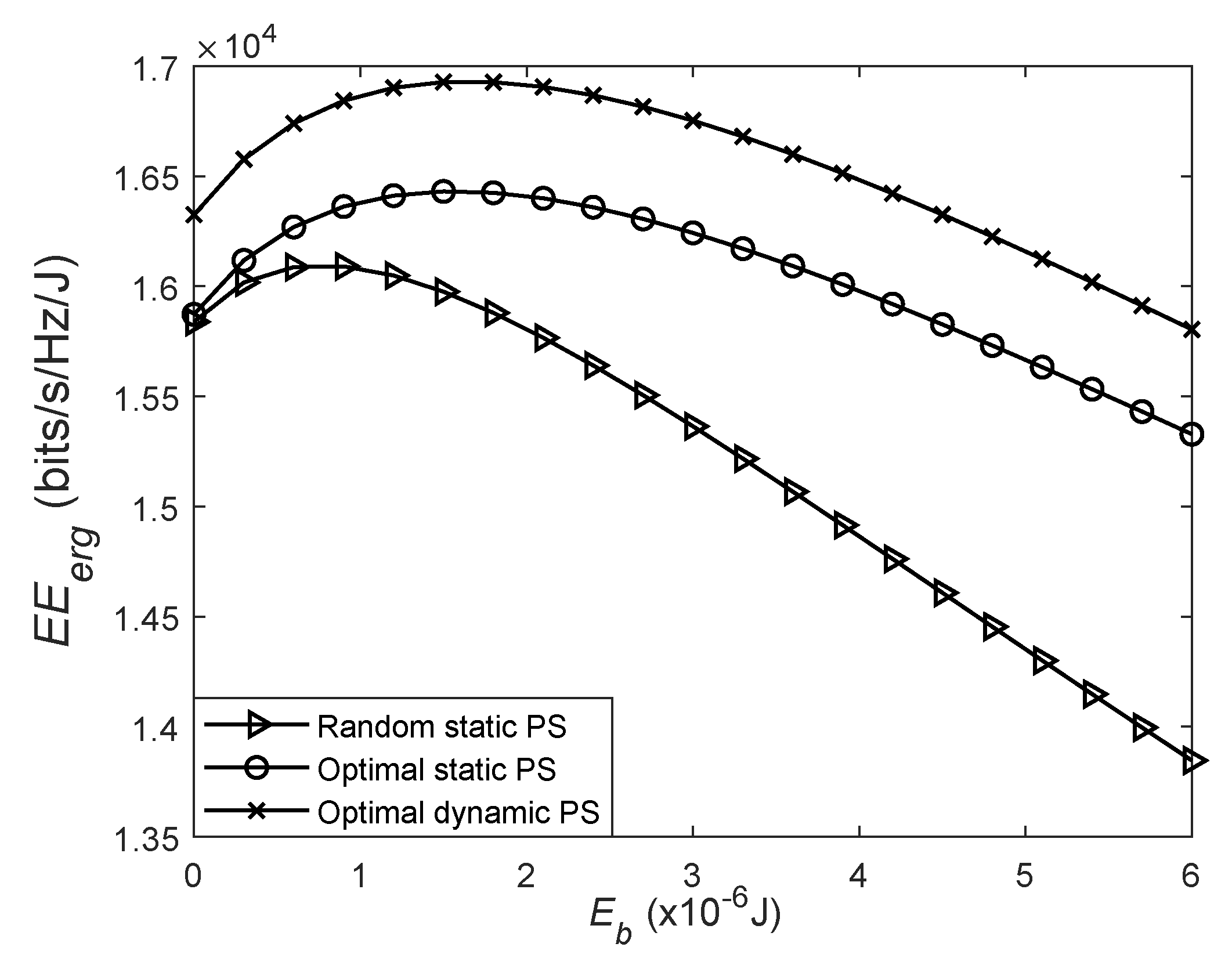
- Simulation results are provided to verify our analytical results, and to compare the static and dynamic PS schemes from the following perspectives. One is to study the performance gaps (in terms of the outage and ergodic capacities) between the static and the dynamic PS schemes for a given amount of assisted energy from the relay’s battery, and the other is to see how much battery energy consumption the dynamic PS scheme could save while maintaining the same performance as the static PS scheme. In addition, we compare the achievable energy efficiency between the static and dynamic PS schemes and show how the assisted energy affects on the energy efficiency.
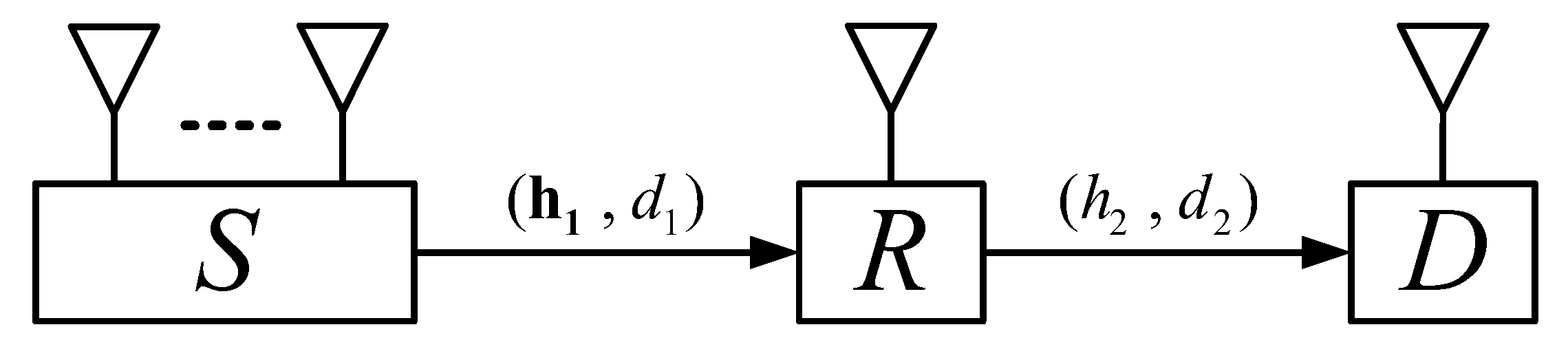
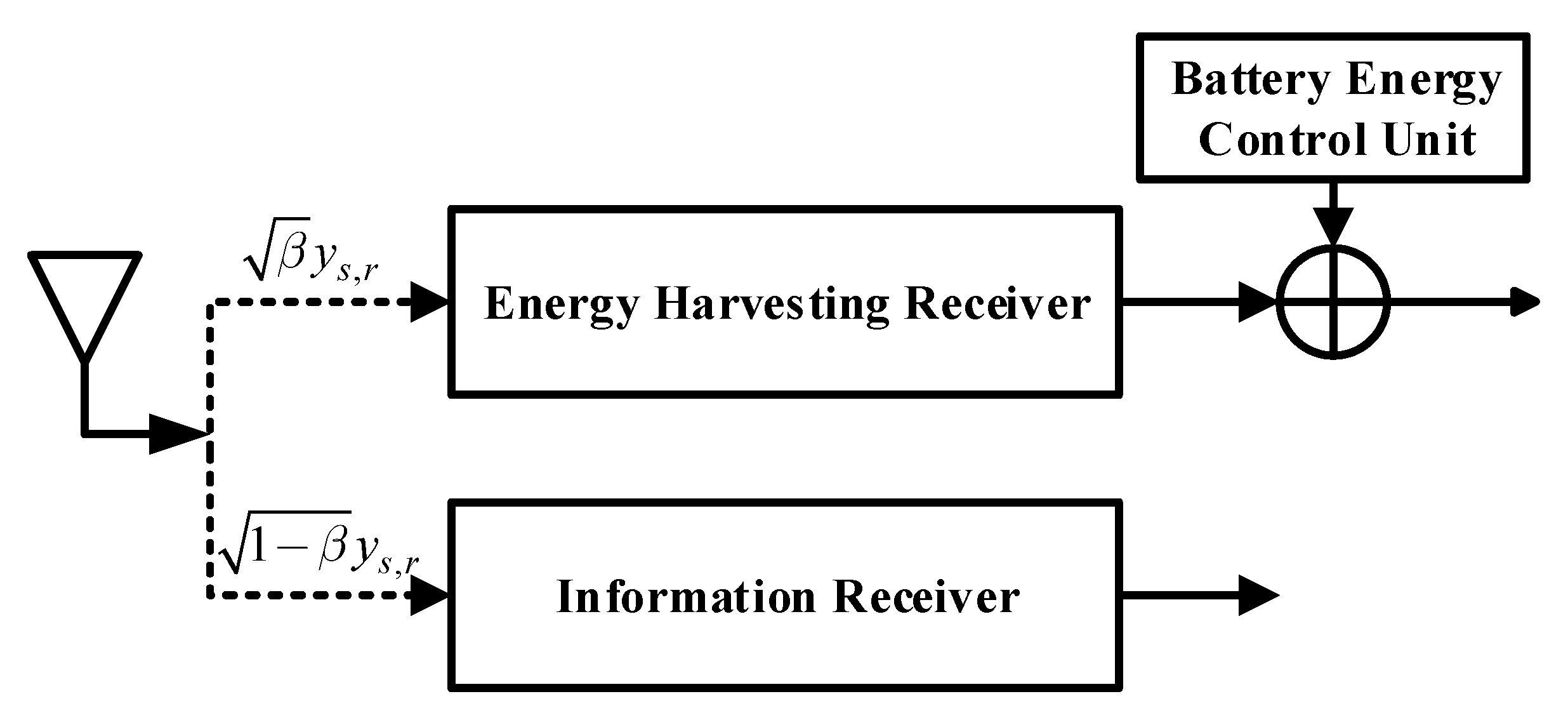
2. System Model
3. Static Power Splitting Scheme
3.1. Outage Capacity
3.2. Ergodic Capacity
4. Dynamic Power Splitting Scheme
4.1. Outage Capacity for the Optimal Dynamic PS
4.1.1.
4.1.2.
4.2. Ergodic Capacity for the Optimal Dynamic PS
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, C.; Yang, H.J.; Sun, F.; Cioffi, J.M.; Yang, L. Multiuser overhearing for cooperative two-way multiantenna relays. IEEE Trans. Veh. Technol. 2016, 65, 3796–3802. [Google Scholar] [CrossRef]
- Li, C.; Zhang, S.; Liu, P.; Sun, F.; Cioffi, J.M.; Yang, L. Overhearing protocol design exploiting intercell interference in cooperative green networks. IEEE Trans. Veh. Technol. 2016, 65, 441–446. [Google Scholar] [CrossRef]
- Liu, K.; Lin, P. Toward self-sustainable cooperative relays: state of the art and the future. IEEE Commun. Mag. 2015, 53, 56–62. [Google Scholar] [CrossRef]
- Jiao, W.; Liu, G.; Wu, H. Queue performance of energy harvesting cognitive radio sensor networks with cooperative spectrum sharing. IEEE Access 2018, 6, 73548–73560. [Google Scholar] [CrossRef]
- Nasir, A.A.; Zhou, X.; Durrani, S.; Kennedy, R.A. Relaying protocols for wireless energy harvesting and information processing. IEEE Trans. Wirel. Commun. 2013, 12, 3622–3636. [Google Scholar] [CrossRef] [Green Version]
- Ghosh, S.; Tamaghna, A.; Maity, S. On outage minimization in rf energy harvesting relay assisted bidirectional communication. Wirel. Netw. 2019, 25, 1. [Google Scholar] [CrossRef]
- Song, K.; Ji, B.; Li, C.; Luxi, Y. Outage analysis for simultaneous wireless information and power transfer in dual-hop relaying networks. Wirel. Netw. 2017, 25, 11. [Google Scholar] [CrossRef]
- Ashraf, M.; Jang, J.W.; Han, J.K.; Lee, K.G. Capacity maximizing adaptive power splitting protocol for cooperative energy harvesting communication systems. IEEE Commun. Lett. 2018, 22, 902–905. [Google Scholar] [CrossRef]
- Sheng, X.; Lu, G.; Shi, L.; Ye, Y. Performance Analysis of Hybrid Protocol Based AF EH Relaying over Asymmetric Fading Channels. Information 2019, 10, 50. [Google Scholar] [CrossRef] [Green Version]
- Gu, Y.; Assa, S. RF-based energy harvesting in decode-and-forward relaying systems: Ergodic and outage capacities. IEEE Trans. Wirel. Commun. 2015, 14, 6425–6434. [Google Scholar] [CrossRef]
- Ye, Y.; Li, Y.; Zhou, F.; Al-Dhahir, N.; Zhang, H. Power splitting-based SWIPT with dual-hop DF relaying in the presence of a direct link. IEEE Syst. J. 2019, 13, 1316–1319. [Google Scholar] [CrossRef]
- Ye, Y.; Shi, L.; Chu, X.; Zhang, H.; Lu, G. On the outage performance of SWIPT-based three-step two-way DF relay networks. IEEE Trans. Veh. Technol. 2019, 68, 3016–3021. [Google Scholar] [CrossRef] [Green Version]
- Do, T.P.; Jeong, Y.; Kim, Y.H. Rate Optimization of Two-Way Relaying with Wireless Information and Power Transfer. Information 2017, 8, 141. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Chen, H.H.; Gu, Y.; Li, Y.; Vucetic, B. Accumulate then forward: An opportunistic relaying protocol for wireless-powered cooperative communications. In Proceedings of the 24th European Signal Processing Conference (EUSIPCO), Budapest, Hungary, 29 August–2 September 2016; pp. 813–817. [Google Scholar]
- Pilanawithana, B.; Atapattu, S.; Evans, J. Energy allocation and energy harvesting in wireless relay networks with hybrid protocol. In Proceedings of the 2017 IEEE Global Communications Conference GLOBECOM, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Modem, S.; Prakriya, S. Optimization of two-way relaying networks with battery-assisted EH relays. IEEE Trans. Commun. 2018, 66, 4414–4430. [Google Scholar] [CrossRef]
- Modem, S.; Prakriya, S. Performance of EH protocols in two-hop networks with a battery-assisted EH relay. IEEE Trans. Veh. Technol. 2018, 67, 10022–10026. [Google Scholar] [CrossRef]
- Modem, S.; Prakriya, S. Optimization of links with a battery-assisted time-switching wireless energy harvesting relay. IEEE Syst. J. 2018, 12, 3044–3051. [Google Scholar] [CrossRef]
- Agrawal, K.; Prakriya, S. Optimization of time splitting based SWIPT in battery-assisted full duplex relays. In Proceedings of the IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–5. [Google Scholar]
- Gradshteyb, I.S.; Ryzhik, I.M. Table of Integrals, Series, and Products, 7th ed.; Academic: New York, NY, USA, 2007. [Google Scholar]
- Liu, Y.; Ding, Z.; Elkashlan, M.; Poor, H.V. Cooperative non-orthogonal multiple access with simultaneous wireless information and power transfer. IEEE J. Sel. Areas Comm. 2016, 34, 938–953. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Ge, J.; Li, J.; Rui, Y.; Guizani, M. A unified approach for calculating the outage performance of two-way af relaying over fading channels. IEEE Trans. Veh. Technol. 2015, 64, 1218–1229. [Google Scholar] [CrossRef]










© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Lu, G.; Ye, Y.; Shi, L. On the Performance of Battery-Assisted PS-SWIPT Enabled DF Relaying. Information 2020, 11, 165. https://doi.org/10.3390/info11030165
Liu Z, Lu G, Ye Y, Shi L. On the Performance of Battery-Assisted PS-SWIPT Enabled DF Relaying. Information. 2020; 11(3):165. https://doi.org/10.3390/info11030165
Chicago/Turabian StyleLiu, Zhipeng, Guangyue Lu, Yinghui Ye, and Liqin Shi. 2020. "On the Performance of Battery-Assisted PS-SWIPT Enabled DF Relaying" Information 11, no. 3: 165. https://doi.org/10.3390/info11030165
APA StyleLiu, Z., Lu, G., Ye, Y., & Shi, L. (2020). On the Performance of Battery-Assisted PS-SWIPT Enabled DF Relaying. Information, 11(3), 165. https://doi.org/10.3390/info11030165