Verification Method for Accumulative Event Relation of Message Passing Behavior with Process Tree for IoT Systems †



Abstract
:1. Introduction
2. Verification Method of Message Passing Behavior in an IoT System
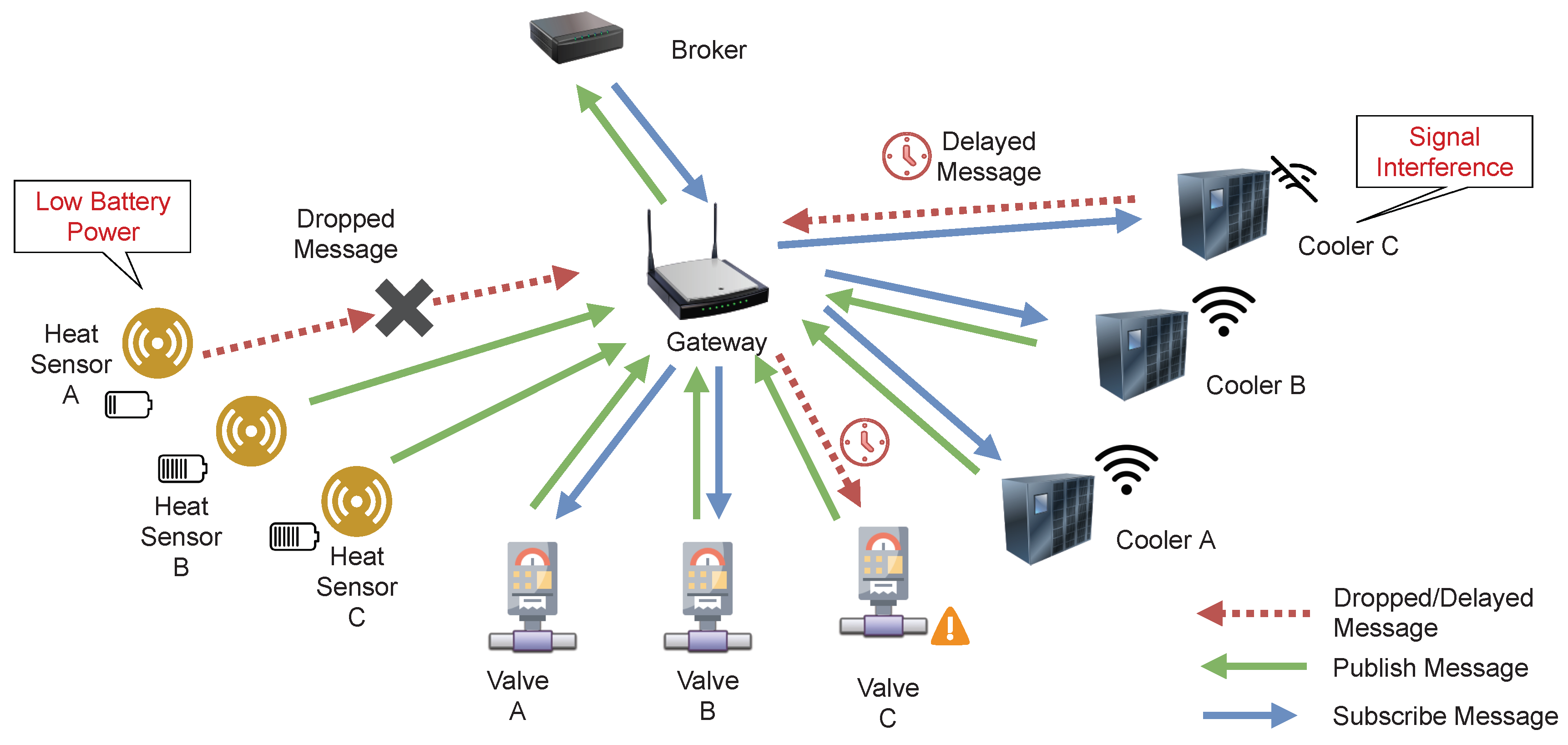
2.1. Message Passing Behavior Verification Problem
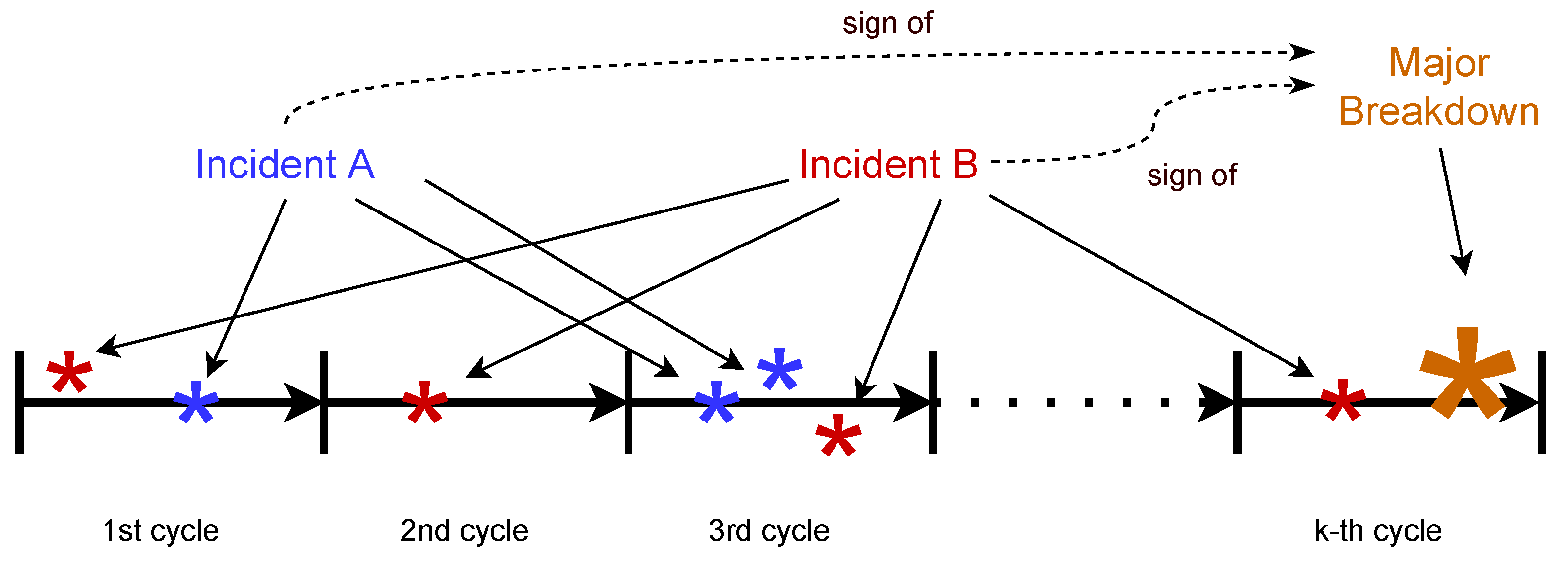
- Fluctuation: Infrequent dropped message due to broken sensor, low sensor battery, or weak network signal in IoT devices.
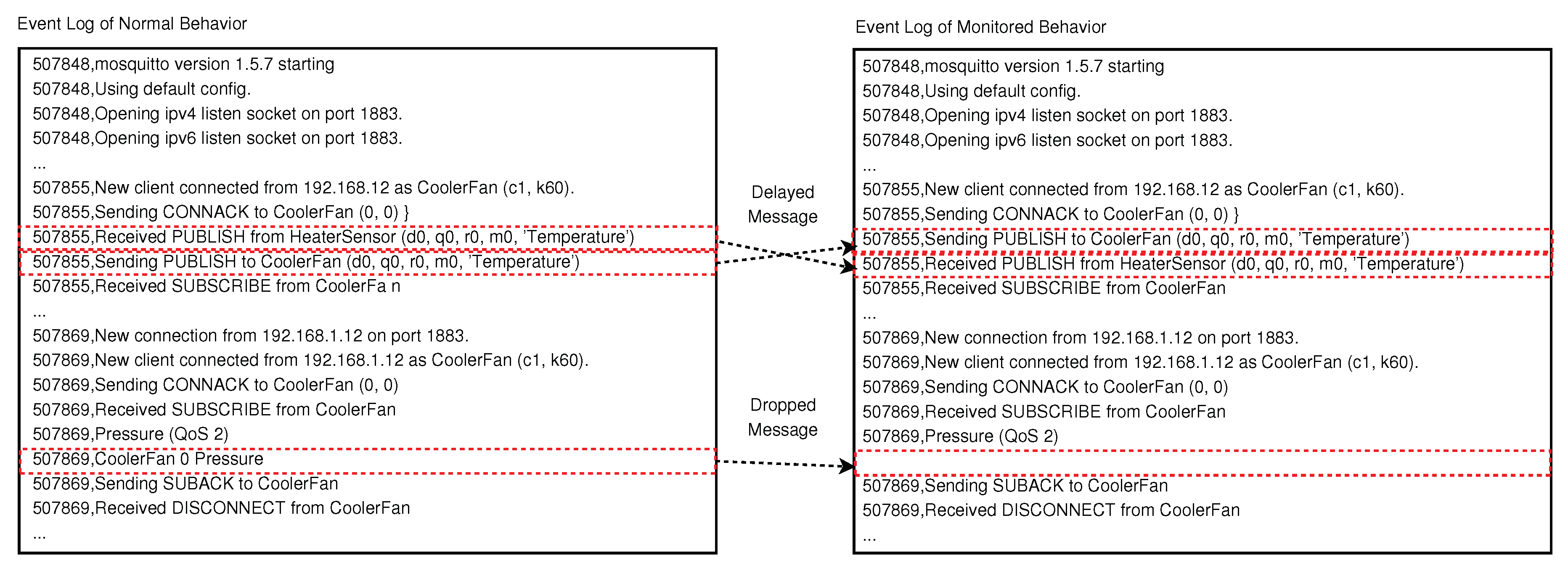
- Delay: Invalid order of message passing due to delay in sending and receiving messages.
2.2. Message Passing Behavior Verification Method
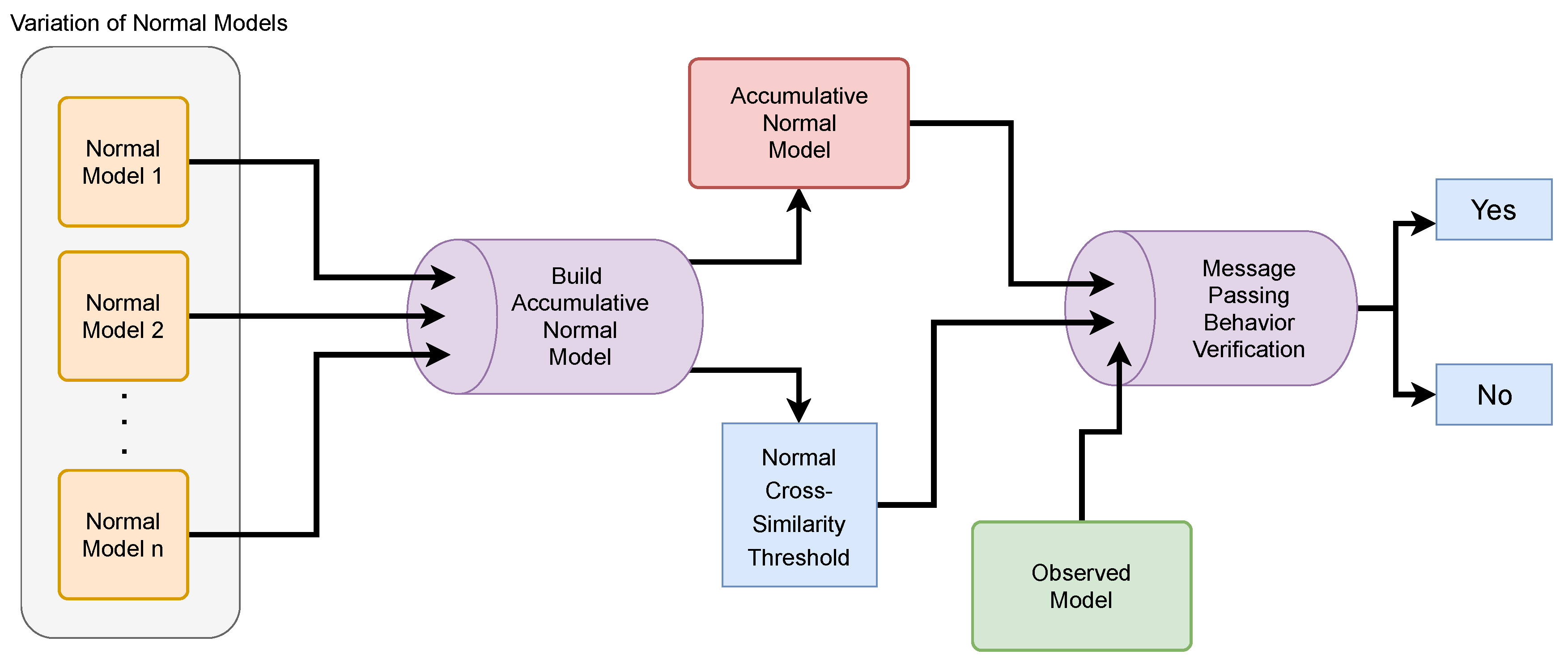
- 1
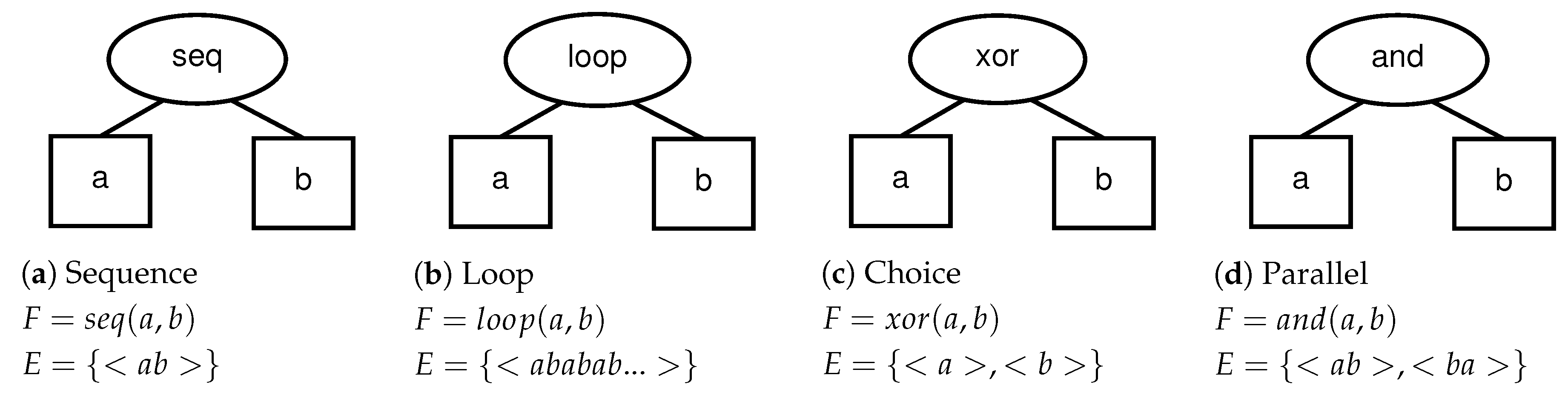
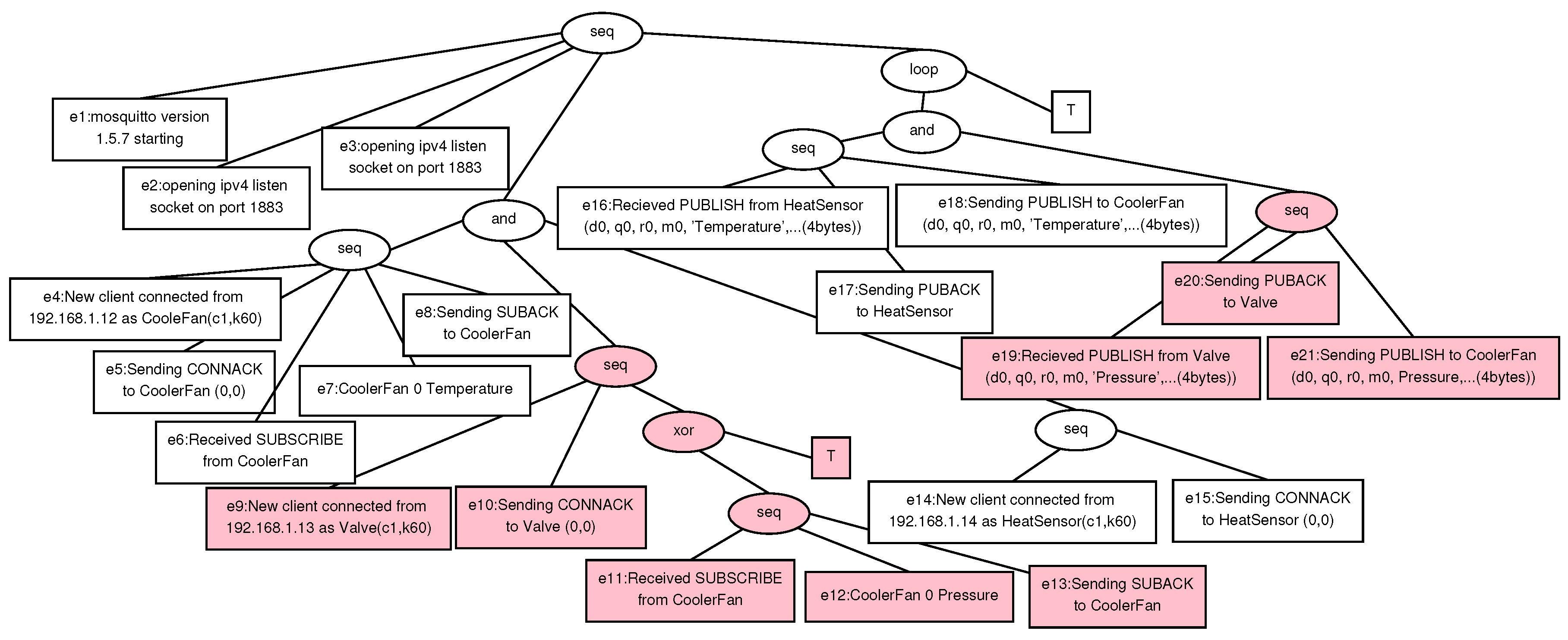
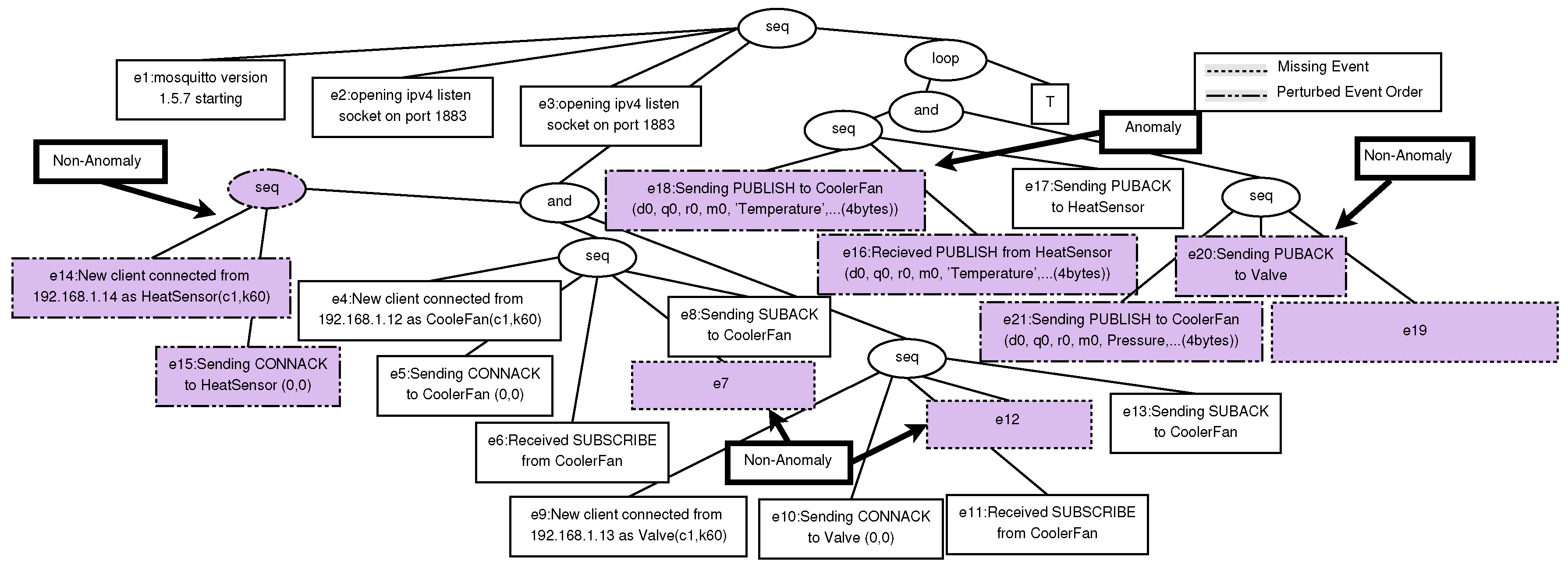
- Extract process tree from using inductive miner [2].
- 2
- Build accumulative normal model by marking and adding nodes with Levenshtein distance more than 1 between .
- 3
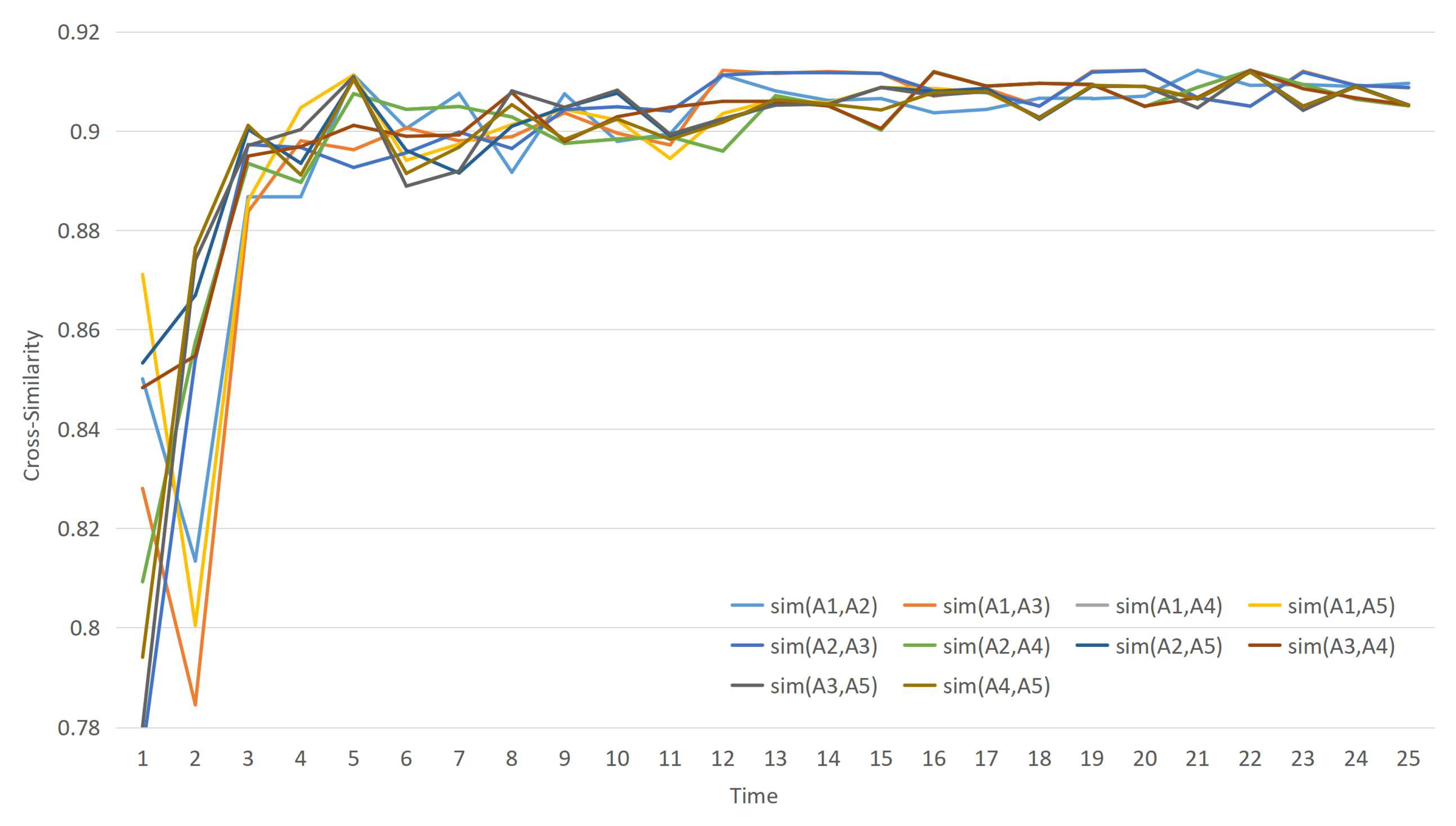
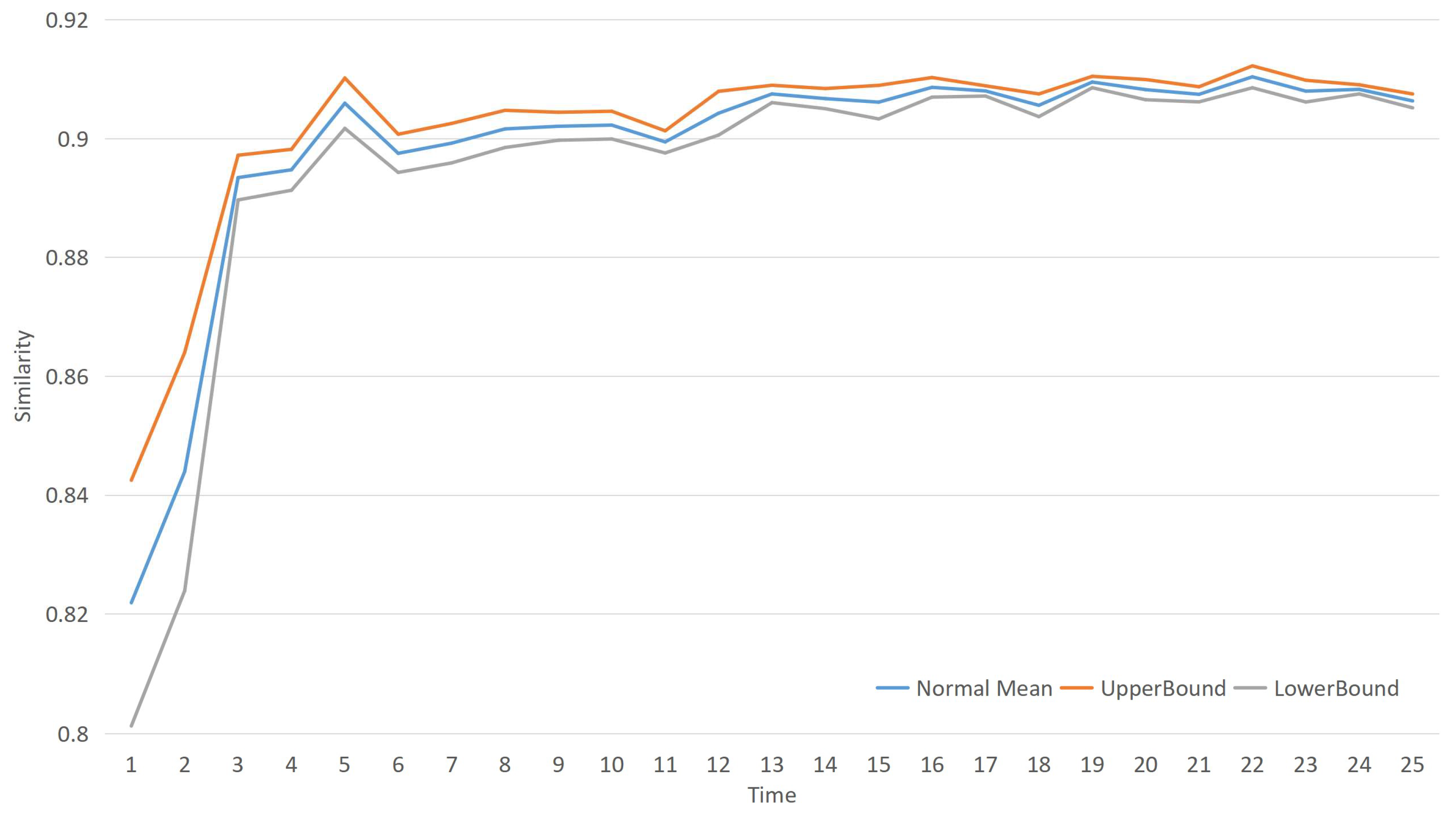
- Calculate the cross-similarity where . Obtain the lower bound normal threshold from the standard deviation of cross-similarity.
- 4
- Calculate the similarity between and . If , then output “No” and stop.
- 5
- Output “Yes” if and stop.
- Process Mining: The process mining takes less than 2 s to be computed using IM [26] algorithm for event log with around 3000 traces. The complexity of IM is discussed in Ref. [29,30], which shows that compared to other process discovery methods, IM is simpler and can be performed in real-time for large event logs.
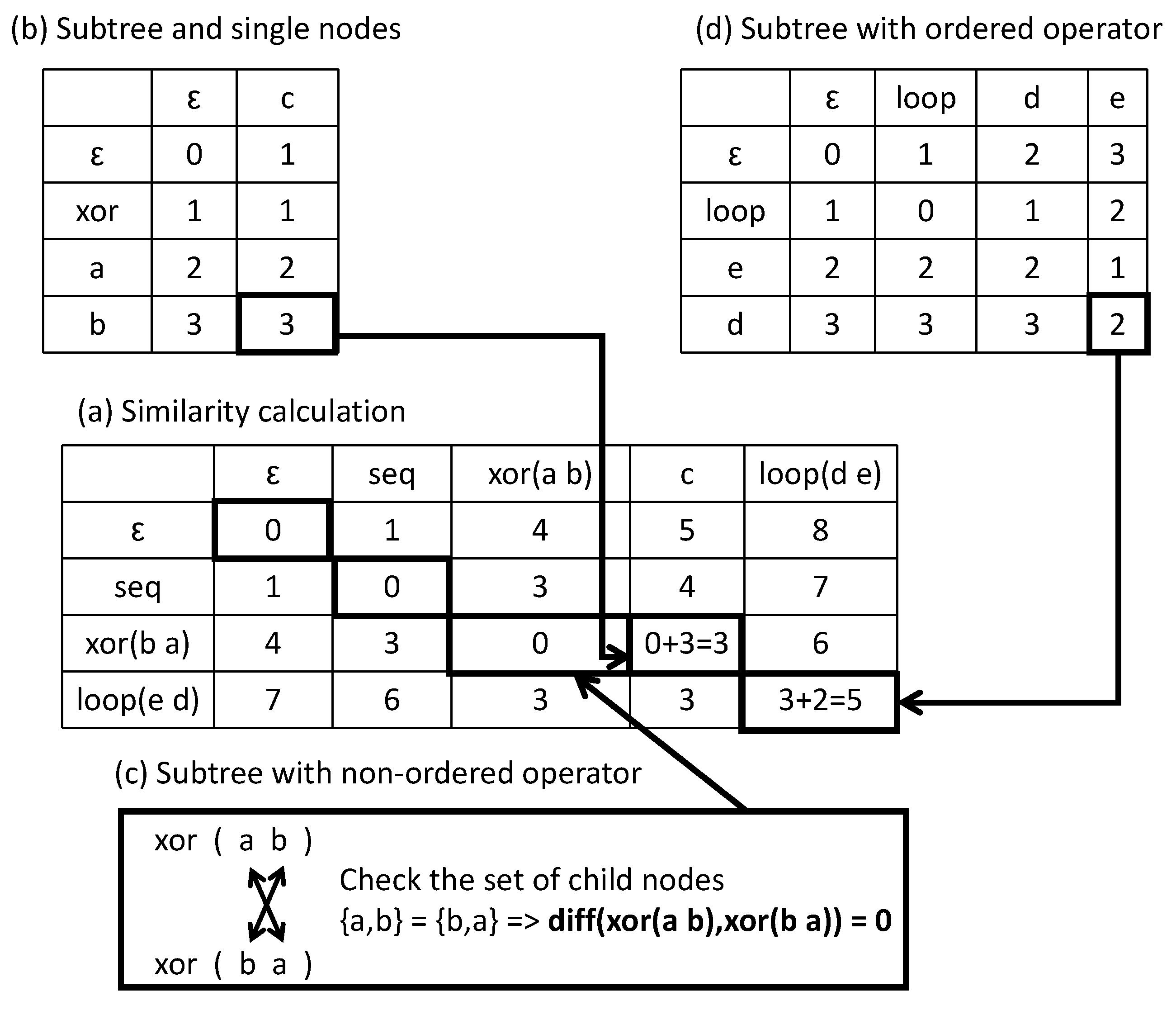
- Similarity Check: The similarity check is based on the recursive version of Levenshtein distance, which uses an iterative matrix to hold the distance of each subtree. Distance is usually computed with dynamic-programming procedure. Computation of two process tree formula takes time and space. However, since the process tree formula can be decomposed into subtree formulas, we can obtain shorter strings and it can be computed in parallel [31] to achieve shorter computation time. In the implementation, we computed 200 events at most in 24 s using parallel processing technique.
- Storage: The storage for 1000 traces took around 152 kb. If we take 100 cycles that produce 10,000 traces, it will take around 1.5 MB per log file. However, we recorded the log in the broker who has hardware performance more than enough to capture the message log and execute the verification procedure.
3. Results
3.1. Experimental Setup
3.2. Reliability of Normal Process Tree Models
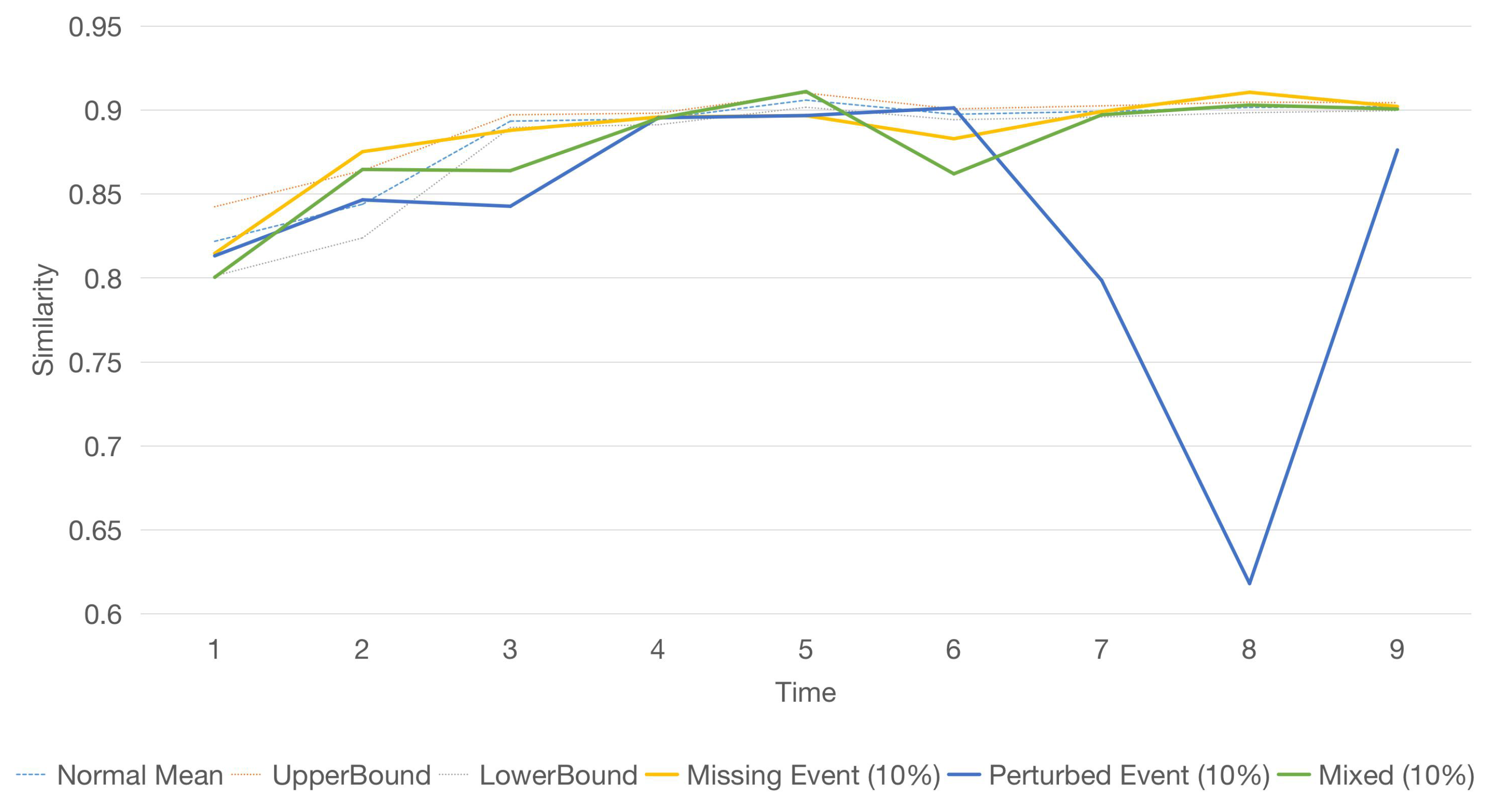
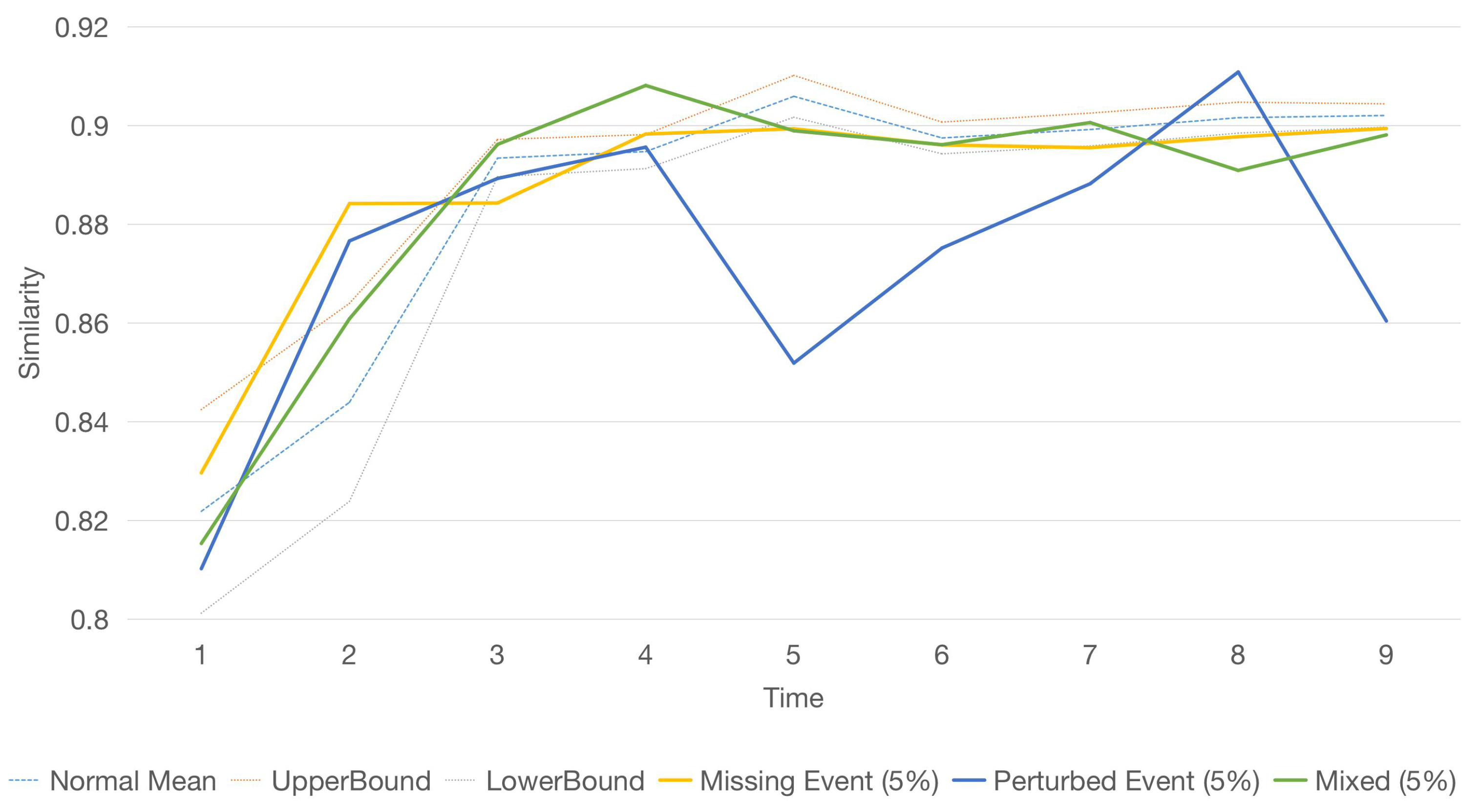
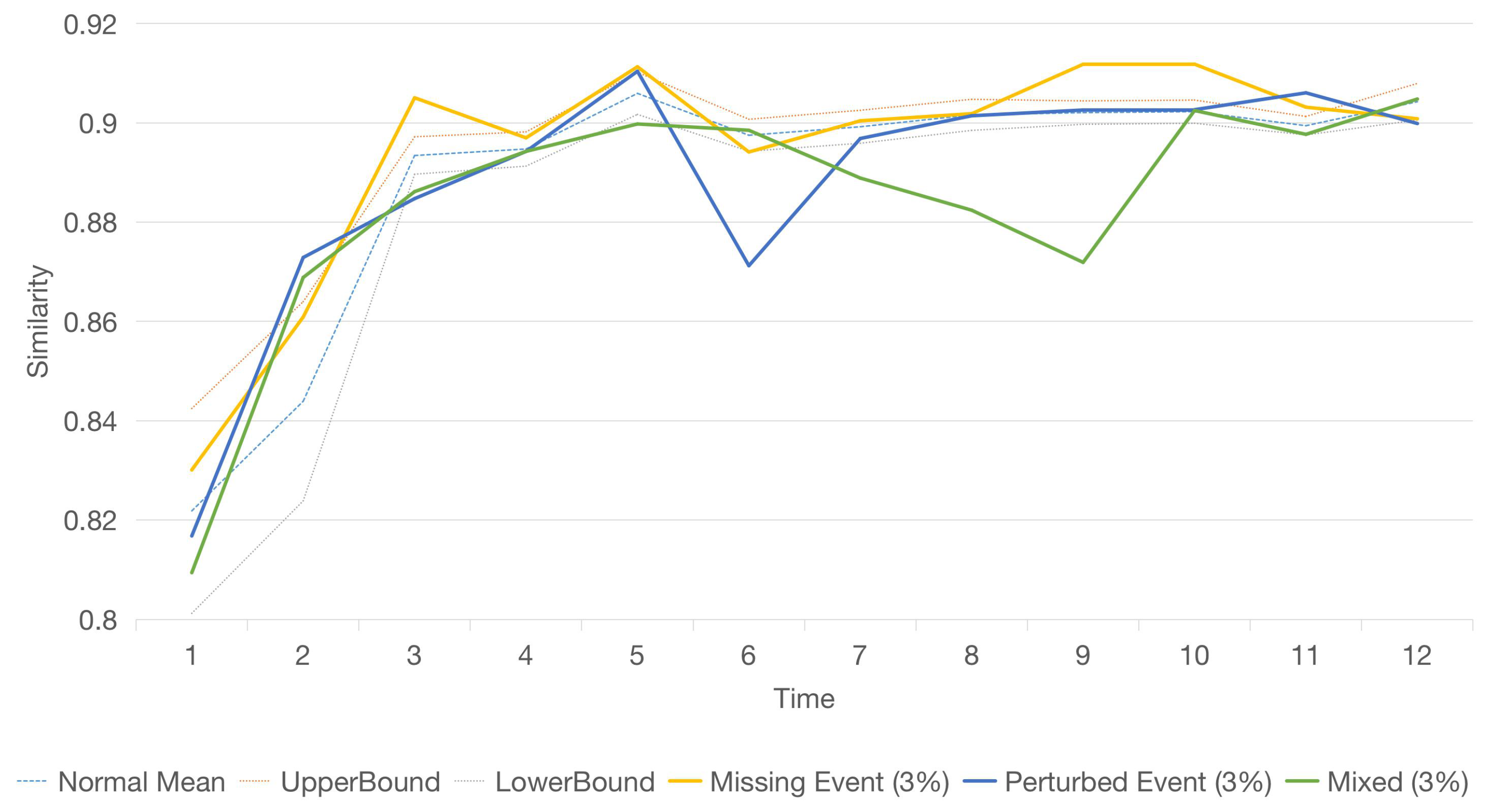
3.3. Detection Capability
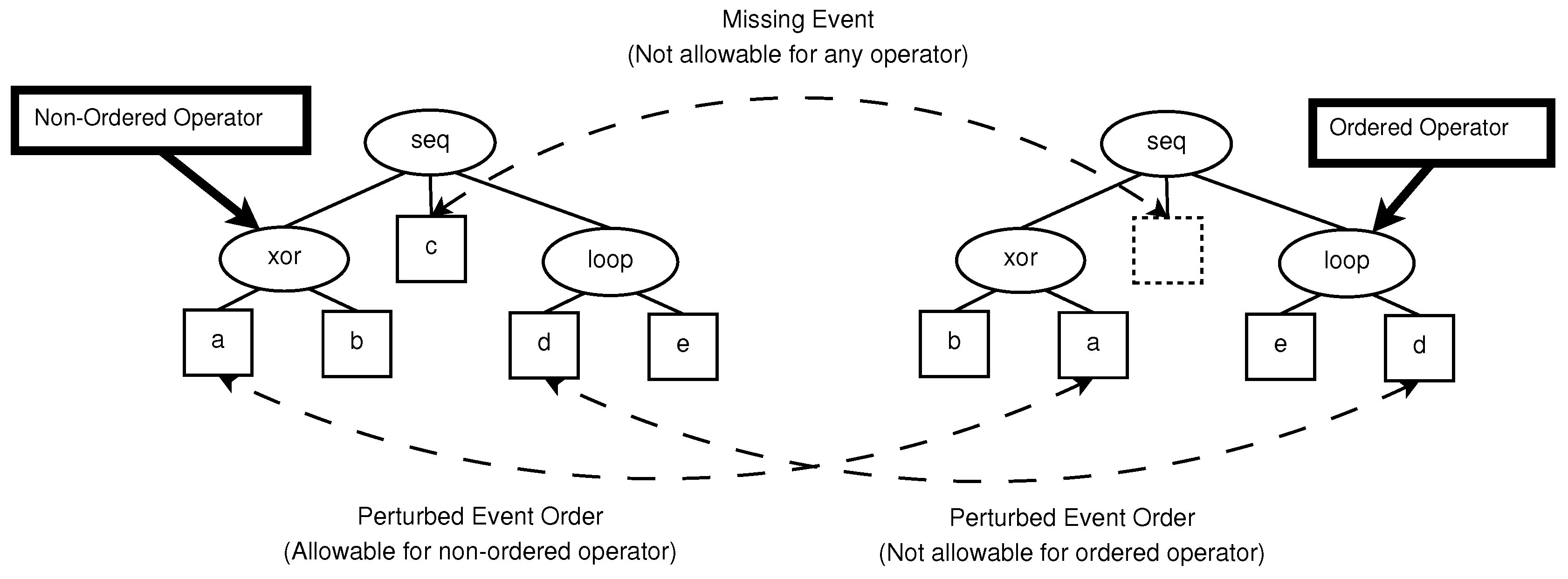
- Missing Event Episode: Events that are missing from traces, i.e., change of to . In real situations, the anomaly is due to a broken sensor or dropped message packet.
- Perturbed Event Order: Event order are not in normal order i.e., change of to . This anomaly might be caused by delay in MQTT message passing or invalid control-flow execution.
- Mixed: Anomaly that contains both of the above.
4. Discussion
5. Related Work
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| NCS | Network Control System |
| ICS | Industrial Control System |
| SCADA | Supervisory Control and Data Acquisition |
| DCS | Distributed Control Systems |
| IoT | Internet of Things |
| MQTT | Message Queuing Telemetry Transport |
| XMPP | Extensible Messaging and Presence Protocol |
| RESTFUL | Representational State Transfer |
| CoAP | Constrained Application Protocol |
| DDoS | Distributed Denial-of-Service |
| RNN | Recurrent Neural Network |
| LRA | Logistic Regression Analysis |
| IM | Inductive Miner |
| WSN | Wireless Sensor Network |
References
- Casado-Vara, R.; Vale, Z.; Prieto, J.; Corchado, J.M. Fault-Tolerant Temperature Control Algorithm for IoT Networks in Smart Buildings. Energies 2018, 11, 3430. [Google Scholar] [CrossRef] [Green Version]
- Wain, A.; Reiff-Marganiec, S.; Jones, K.; Janicke, H. Towards a distributed runtime monitor for ICS/SCADA systems. In Proceedings of the 4th International Symposium for ICS & SCADA Cyber Security Research 2016 (ICS-CSR), Belfast, UK, 23–25 August 2016; pp. 1–10. [Google Scholar]
- Delgado, R.; Park, J.; Choi, B.W. Open Embedded Real-time Controllers for Industrial Distributed Control Systems. Electronics 2019, 8, 223. [Google Scholar] [CrossRef] [Green Version]
- Carli, R.; Cavone, G.; Ben Othman, S.; Dotoli, M. IoT Based Architecture for Model Predictive Control of HVAC Systems in Smart Buildings. Sensors 2020, 20, 781. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, E.; Seo, Y.-D.; Kim, Y.-G. Self-Adaptive Framework Based on MAPE Loop for Internet of Things. Sensors 2019, 19, 2996. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mallikarjuna, B. Feedback-Based Fuzzy Resource Management in IoT-Based-Cloud. Int. J. Fog Comput. 2020, 3, 1–21. [Google Scholar] [CrossRef]
- Sato, K.; Kawamoto, Y.; Nishiyama, H.; Kato, N.; Shimizu, Y. A modeling technique utilizing feedback control theory for performance evaluation of IoT system in real-time. In Proceedings of the 2015 International Conference on Wireless Communications & Signal Processing (WCSP), Nanjing, China, 15–17 October 2015; pp. 1–5. [Google Scholar]
- Lin, Y.-B.; Lin, Y.-W.; Lin, J.-Y.; Hung, H.-N. SensorTalk: An IoT Device Failure Detection and Calibration Mechanism for Smart Farming. Sensors 2019, 19, 4788. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eriş, Ç.; Güngör, V.Ç.; Bölük, P.S. Analysis of battery-powered sensor node lifetime for smart grid applications. In Proceedings of the 2016 24th Signal Processing and Communication Application Conference (SIU), Zonguldak, Turkey, 16–19 May 2016; pp. 2117–2120. [Google Scholar] [CrossRef]
- Celaya-Echarri, M.; Azpilicueta, L.; López-Iturri, P.; Aguirre, E.; Falcone, F. Performance Evaluation and Interference Characterization of Wireless Sensor Networks for Complex High-Node Density Scenarios. Sensors 2019, 19, 3516. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- IoT developer Survey 2019 Results. Available online: https://iot.eclipse.org/community/iot-surveys/ (accessed on 21 April 2020).
- MQTT Communication Protocol. Available online: https://mqtt.org/ (accessed on 21 April 2020).
- XMPP Protocol. Available online: https://xmpp.org/ (accessed on 21 April 2020).
- REST. Available online: https://restfulapi.net/ (accessed on 21 April 2020).
- CoAP. Available online: https://coap.technology/ (accessed on 21 April 2020).
- Wressnegger, C.; Schwenk, G.; Arp, D.; Rieck, K. A Close Look on n-Grams in Intrusion Detection: Anomaly Detection vs. Classification. In Proceedings of the ACM Conference on Computer and Communications Security, Berlin, Germany, 4–8 November 2013; pp. 67–76. [Google Scholar]
- Goh, J.; Adepu, S.; Tan, M.; Lee, Z.S. Anomaly Detection in Cyber Physical Systems Using Recurrent Neural Networks. In Proceedings of the IEEE 18th International Symposium on High Assurance Systems Engineering (HASE), Singapore, 12–14 January 2017; pp. 140–145. [Google Scholar]
- Noureen, S.S.; Bayne, S.B.; Shaffer, E.; Porschet, D.; Berman, M. Anomaly Detection in IoT System using Logistic Regression Analysis. In Proceedings of the 2019 IEEE TPEC, Anaheim, CA, USA, 17–21 March 2019; pp. 1–6. [Google Scholar]
- Haripriya, A.P.; Kulothungan, K. Secure-MQTT: An efficient fuzzy logic-based approach to detect DoS attack in MQTT protocol for internet of things. EURASIP J. Wirel. Comm. Netw. 2019, 2019, 90. [Google Scholar]
- Myers, D.; Suriadi, S.; Radke, K.; Foo, E. Anomaly Detection for Industrial Control Systems using Process Mining. Comput. Secur. 2018, 78, 103–125. [Google Scholar] [CrossRef]
- Kiyoshi, K.; Hiroyuki, M.; Tomoya, S.; Mayumi, T. Big Data Analytics in the Cloud-System Invariant Analysis Technology Pierces the Anomaly. NEC Tech. J. 2015, 9, 85–89. [Google Scholar]
- Gou, Z.; Ahmadon, M.A.B.; Yamaguchi, S.; Gupta, B.B. A Petri net-based framework of intrusion detection systems. In Proceedings of the IEEE 4th Global Conference on Consumer Electronics (GCCE), Osaka, Japan, 27–30 October 2015; pp. 579–583. [Google Scholar]
- Ushida, S. Control performance improvements due to fluctuations in dynamics of stochastic control systems. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 1430–1436. [Google Scholar]
- Ahmadon, M.A.B.; Yamaguchi, S. State Number Calculation Problem of Workflow Nets. IEICE Trans. Inf. Syst. 2015, 98, 1128–1136. [Google Scholar] [CrossRef] [Green Version]
- Van der Aalst, W.M.P. On the Representational Bias in Process Mining. In Proceedings of the 2011 IEEE 20th International Workshops on Enabling Technologies: Infrastructure for Collaborative Enterprises, Paris, France, 27–29 June 2011; pp. 2–7. [Google Scholar]
- Leemans, S.J.J.; Fahland, D.; van der Aalst, W.M.P. Discovering Block-Structured Process Models from Incomplete Event Logs. In International Conference on Applications and Theory of Petri Nets and Concurrency; Springer: Cham, Switzerland, 2014; pp. 91–110. [Google Scholar]
- Process Mining Tool (ProM). Available online: http://promtools.org/ (accessed on 21 April 2020).
- Gusfield, D. Algorithms on Strings, Trees, and Sequences; Cambridge University Press: Cambridge, UK, 1997; ISBN 0-521-58519-8. [Google Scholar]
- Ghawi, R. Process Discovery using Inductive Miner and Decomposition. arXiv 2016, arXiv:1610.07989. [Google Scholar]
- Dijkman, R.; Gao, J.; Syamsiyah, A.; van Dongen, B.; Grefen, P.; ter Hofstede, A. Enabling efficient process mining on large data sets: Realizing an in-database process mining operator. Distrib. Parallel Databases 2020, 38, 227–253. [Google Scholar] [CrossRef] [Green Version]
- Boroujeni, M.; Ehsani, S.; Ghodsi, M.; HajiAghayi, M.T.; Seddighin, S. Approximating Edit Distance in Truly Subquadratic Time: Quantum and MapReduce. In Proceedings of the 2018 Annual ACM-SIAM Symposium on Discrete Algorithms, New Orleans, LA, USA, 7–10 January 2018. [Google Scholar]
- Process Tree Based Anomaly Detection Program. Available online: https://github.com/anuaruddin/processs-tree-based-anomaly-detection (accessed on 4 April 2020).
- Ray Multi-Processing Library. Available online: https://ray.readthedocs.io/en/latest/multiprocessing.html (accessed on 4 April 2020).
- Mitchell, R.; Chen, I.R. A survey of intrusion detection techniques for cyber-physical Systems. ACM Comput. Surv. 2014, 46, 1–29. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Lin, H.; Jiang, H. Trajectory-based multi-dimensional outlier detection in wireless sensor networks using Hidden Markov Models. Wirel. Netw. 2014, 20, 2409–2418. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Protocol | MQTT vs. 5.0 (TCP/IP) |
|---|---|
| Broker | HP ProLiant ML150 G6 4-core 2.5 GHz and 16 GB RAM |
| Operating System | Linux Ubuntu Desktop 19.10 with Contiki Cooja 3.0 |
| MQTT Broker | Eclipse Mosquitto 1.6.9 |
| MQTT Client | MQTT Clients 1.4.12 |
| Node Startup Delay | 1000 ms |
| Anomaly Type | Deviation Range | First Detection (3%) | First Detection (5%) | First Detection (10%) |
|---|---|---|---|---|
| Missing Event | Low (10–20%) | 15 min | 3 min | 3 min |
| Perturbed Order | High (>60%) | 3 min | 3 min | 3 min |
| Mixed | Medium (20–60%) | 3 min | 8 min | 3 min |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bin Ahmadon, M.A.; Yamaguchi, S. Verification Method for Accumulative Event Relation of Message Passing Behavior with Process Tree for IoT Systems. Information 2020, 11, 232. https://doi.org/10.3390/info11040232
Bin Ahmadon MA, Yamaguchi S. Verification Method for Accumulative Event Relation of Message Passing Behavior with Process Tree for IoT Systems. Information. 2020; 11(4):232. https://doi.org/10.3390/info11040232
Chicago/Turabian StyleBin Ahmadon, Mohd Anuaruddin, and Shingo Yamaguchi. 2020. "Verification Method for Accumulative Event Relation of Message Passing Behavior with Process Tree for IoT Systems" Information 11, no. 4: 232. https://doi.org/10.3390/info11040232
APA StyleBin Ahmadon, M. A., & Yamaguchi, S. (2020). Verification Method for Accumulative Event Relation of Message Passing Behavior with Process Tree for IoT Systems. Information, 11(4), 232. https://doi.org/10.3390/info11040232