Checklist for Expert Evaluation of HMIs of Automated Vehicles—Discussions on Its Value and Adaptions of the Method within an Expert Workshop



 ,
,  , ,
, , 

Abstract
:1. Background
- Functioning properly;
- Engaged in automated driving mode;
- Currently ‘unavailable’ for use;
- Experiencing a malfunction; and/or
- Requesting a control transition from ADS to the operator.
2. Content and Usage of the Checklist
2.1. Checklist Items
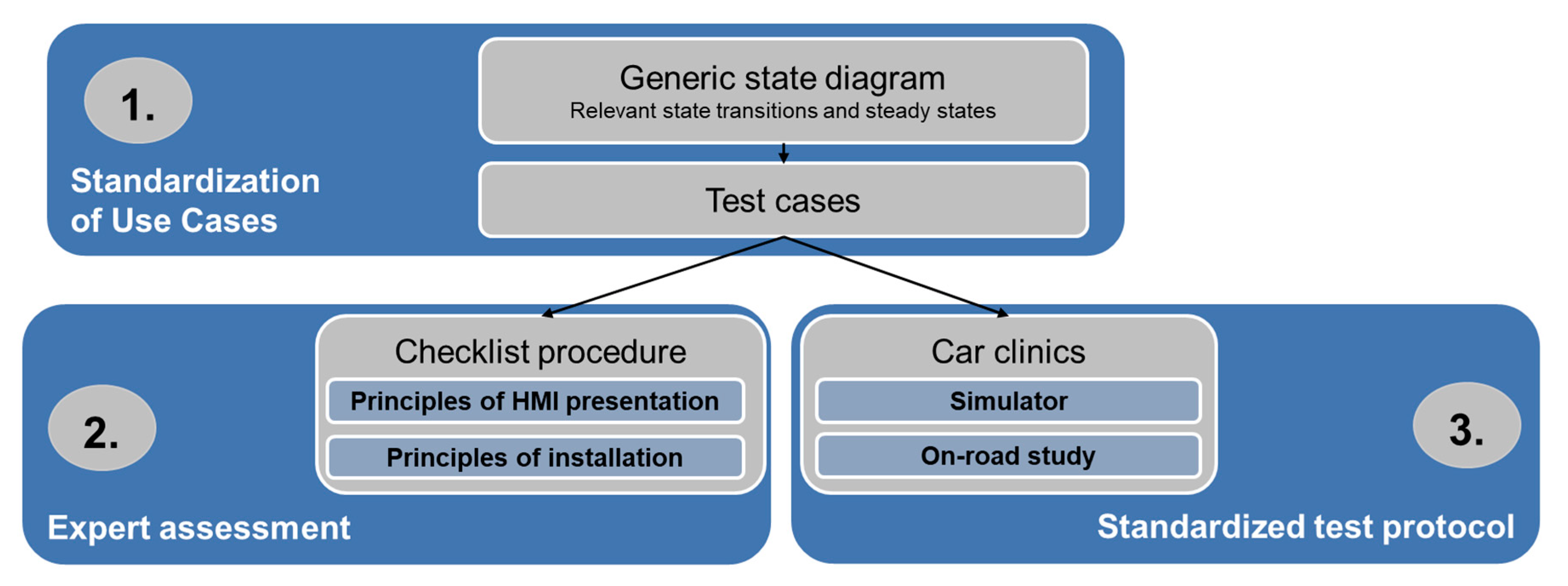
2.2. Method Description
- For the minimum HMI requirements to be fulfilled, each of the use cases should be reflected in a mode indicator or the change of a mode indicator that must be present in the in-vehicle HMI. At minimum, a persistent mode indicator should be presented visually. In addition, auditory, tactile, or kinaesthetic cues for mode transitions are recommended.
- The design of the respective mode indicator should be in accordance with the common HMI standards and best practices that are the basis of the checklist.
- “major concerns”: non-compliance with guideline;
- “minor concerns”: partial fulfilment of guideline, but some aspects of the HMI are non-compliant;
- “no concerns”: compliance of all HMI aspects with guideline;
- “measurement necessary”/”subject to verification”: no definite conclusion can be given on the basis of the checklist and empirical testing is needed. This category should be chosen if highly innovative designs are used that are not covered by current standards and best practices. An example would be the use of other communication channels than the above-mentioned (e.g., olfactory cues);
- “not applicable”: respective design recommendation not applicable to the system under investigation (e.g., HMI without vibrotactile output).
2.3. Application Domain of the Method
3. Intention of the Workshop
4. Evaluation Procedure during the Workshop
- The activation of the system;
- Driving with active L2 for a longer time interval (i.e., 4–5 min);
- Experiencing the driver monitoring system, which required a take-over in case the driver did not react to it;
- The deactivation of the system;
- Short-term standby modes, for example, in the case of non-detection of lane markings or lane changes;
- Planned system limits when exiting the interstate.
5. Description of the Evaluated Systems
5.1. The GM Supercruise System
5.2. The Tesla Autopilot
6. Methodological Issues Discussed during the Workshop
6.1. Design Issues of the Checklist
6.2. Missing and Redundant Items
- Displaying HMI elements close to the line of sight (part of item 4);
- Checking color contrast (item 7);
- Checking text size (character height and stroke width, item 8);
- Design of auditory or vibrotactile feedback with regard to length, loudness, and frequency (item 17).
- Visual demands that result from the design of the visual displays, including content and arrangement;
- Motoric demands that result from the number and arrangement of the operational devices;
- Cognitive demands that result from the system logic and the difficulty in understanding the various system modes and the conditions for the transitions between them;
- In addition, temporal demands, meaning the requirements on the reaction to hazards play an important role and are influenced by the design of warning messages and the take-over request.
- Identification of the hazard;
- Identification of a means to avoid the hazard;
- The consequences of not avoiding the hazard.
6.3. Human Factors Aspects to be Considered by Other Methods
6.4. Test Procedure
- Search for common published standards;
- If 1 does not apply, evaluate the system by extrapolating those concepts from the checklist that seems to be transferable to the innovative HMI;
- If 1 and 2 do not apply, conduct empirical testing.
6.5. General Value of the Checklist
7. Conclusions and Outlook
- The structure of the checklist will be revised in order to achieve a better usability for the experts. This will mainly refer to a re-arrangement of the items into more global categories and underlying subcategories.
- Items regarding measurable aspects such as text sizes, line of sight, or colour contrasts will remain in the checklist to be assessed subjectively by the experts (as confirmation from a user perspective based on technical tests that will be conducted later in the design process). Absolute measurable numbers will be removed from the examples list.
- A new category of perceived complexity will be included in the checklist. This category will comprise several items/examples, which still have to be defined. Issues that should be considered are
- ○
- the visual demands of the HMI in general;
- ○
- the cognitive demands resulting from the complexity of the system’s logic;
- ○
- the motoric demands resulting from the number, positioning, and arrangement of operational devices;
- ○
- the ease of learning the interaction with the system.
- The following new items will be included in the checklist
- ○
- An item on the appropriate design of other display elements;
- ○
- An item on the content of a warning/take-over request.
- The test procedure itself will remain in the proposed manner with two experts experiencing the system to be evaluated within a defined set of use cases in real drives, first separately filling out the checklist, and finally give a global rating based on a joint discussion.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | Unintentional activation and deactivation should be prevented. | Assessment |
| + System design ensures driver readiness before transfer of control (e.g., pushing of two buttons simultaneously, need to have both hands on the steering wheel, need to have eyes on the road) - Surprising or inexplicable driver-initiated activation/deactivation during regular use | o major concerns o minor concerns o no concerns o measurement necessary | |
| 2 | The system mode should be displayed continuously. | |
| + Minimum set of mode indicators present (1) functioning properly (2) currently engaged in an automated driving mode (3) currently unavailable for automated driving (4) experiencing a malfunction (5) requesting a control transition from the automated driving system to the operator - Indicators missing - Indicators not distinguishable from each other - Indicators only displayed for short periods of time - Mode indication discontinued (e.g., through pop-ups) | o major concerns o minor concerns o no concerns o measurement necessary | |
| 3 | System state changes should be effectively communicated. | |
| + Recognizable change of pictorial indicator + Auditory/haptic feedback + Communication of responsibility (e.g., by disclaimer) + Pop-up messages + Error messages are provided in case (e.g., failed activation) + Delayed reaction to control input displayed in HMI | o major concerns o minor concerns o no concerns o measurement necessary | |
| 4 | Visual interfaces used to communicate system states should be mounted to a suitable position and distance. High-priority information should be presented close to the driver’s expected line of sight. | |
| + Important information displayed in 30° cone about normal line of sight + Safety-critical information displayed in 20° cone about normal line of sight + Peripheral displays support noticing of mode changes (e.g., movement or size of displays) + Status information mirrored on NDRT device | o major concerns o minor concerns o no concerns o measurement necessary | |
| 5 | HMI elements should be grouped together according to their function to support the perception of mode indicators. | |
| - Unnecessary glances to retrieve information from display (e.g., to interpret a symbol and perceive accompanying text) + Indicators pertaining to the automation are grouped together + High priority messages are easily distinguished from low-priority messages | o major concerns o minor concerns o no concerns o measurement necessary | |
| 6 | Time-critical interactions with the system should not afford continuous attention. | |
| - Important information is displayed too shortly (e.g., only for a few seconds) - While the driver is responsible for the DDT, sustained attention (longer than 1.5 s) is needed to accomplish an interaction | o major concerns o minor concerns o no concerns o measurement necessary | |
| 7 | The visual interface should have a sufficient contrast in luminance and/or color between foreground and background. | |
| + Sufficient color and/or luminance contrast to identify different automation modes | o major concerns o minor concerns o no concerns o measurement necessary | |
| 8 | Texts (e.g., font types and size of characters) and symbols should be easily readable from the permitted seating position. | |
| + Displayed text and symbols are big enough to be easily readable + Display resolution is good enough to be easily readable + Character width and stroke width appear to be appropriate + Text-fonts are easily readable | o major concerns o minor concerns o no concerns o measurement necessary | |
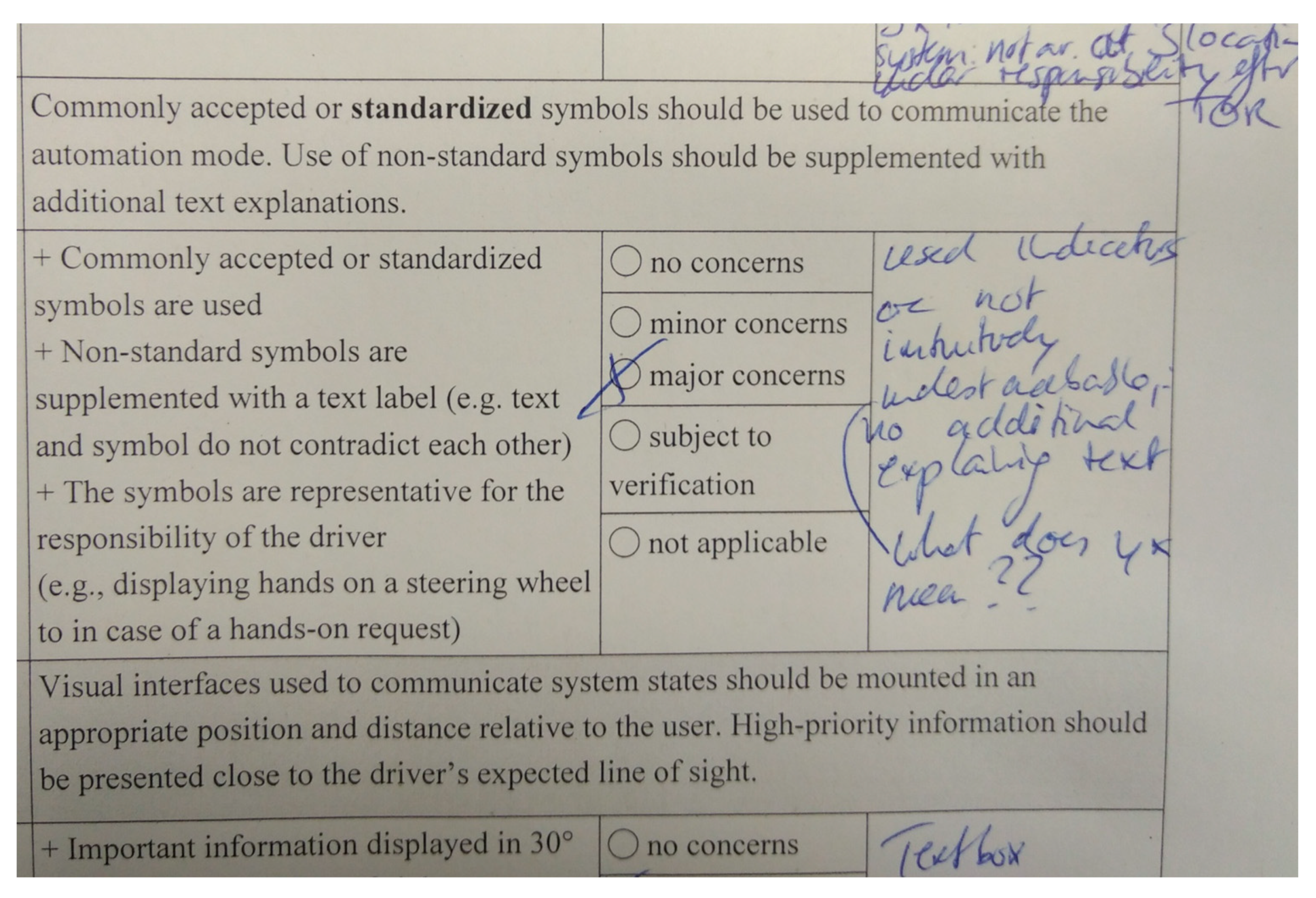
| 9 | Commonly accepted or standardized symbols should be used to communicate the automation mode. Use of non-standard symbols should be supplemented by additional text explanations. | |
| + Commonly accepted or standardized symbols are used + Non-standard symbols are supplemented with a text label + The symbols are representative for the responsibility of the driver (e.g., displaying hands on a steering wheel to in case of a hands-on request) | o major concerns o minor concerns o no concerns o measurement necessary | |
| 10 | The semantic of a message should be in accordance with its urgency. | |
| + Use of notification-style to present non-critical information + Use of command-style to present critical information + Wording in accordance with criticality of the situation (e.g., “caution”, “danger”, “warning”) | o major concerns o minor concerns o no concerns o measurement necessary | |
| 11 | Messages should be conveyed using the language of the users (e.g., national language, avoidance of technical language, use of common syntax). | |
| + Use of national language + Use of simple language + Avoidance of abbreviations + Displaying functionality rather than SAE/NHTSA/BASt-level | o major concerns o minor concerns o no concerns o measurement necessary | |
| 12 | Text messages should be as short as possible. | |
| + Messages are as short as possible + Not more than four chunks of information are displayed | o major concerns o minor concerns o no concerns o measurement necessary | |
| 13 | Not more than five colors should be consistently used to code system states (excluding white and black). | |
| + Colors are used consistently throughout an automated driving mode + Not more than five colors are used | o major concerns o minor concerns o no concerns o measurement necessary | |
| 14 | The colors used to communicate system states should be in accordance with common conventions and stereotypes. | |
| + Colors are in accordance with common stereotypes of the user population + Red = imminent danger, yellow/amber = caution, green = hazard-free operating state | o major concerns o minor concerns o no concerns o measurement necessary | |
| 15 | Design for color-blindness by redundant coding and avoidance of red/green and blue/yellow combinations. | |
| + green/red and yellow/blue combinations are avoided + system states are redundantly coded in a suitable way | o major concerns o minor concerns o no concerns o measurement necessary | |
| 16 | Auditory output should raise the attention of the driver without startling her/him or causing pain. | |
| Generic auditory output + suitable length (100 ms–500 ms) + suitable loudness (50 dB–90 dB, should be 15 dB above background noise) + frequencies between 500 and 4000 Hz | o major concerns o minor concerns o no concerns o measurement necessary | |
| Vibrotactile output + suitable length (50 ms–200 ms) + comfortable stimuli 15–20 dB above threshold + frequencies between 150 and 300 Hz | o major concerns o minor concerns o no concerns o measurement necessary | |
| 17 | Auditory and vibrotactile output should be adapted to the urgency of the message. | |
| Generic auditory output + Auditory output of varying urgency is distinguishably different by pulse rate, frequency, or loudness + Low-priority information is either unobtrusive or without auditory output | o major concerns o minor concerns o no concerns o measurement necessary | |
| Vibrotactile output + urgency is coded through a variation of location and timing, not frequency and amplitude | o major concerns o minor concerns o no concerns o measurement necessary | |
| 18 | High-priority messages should be multimodal. | |
| + high priority information is presented in more than one modality + auditory or vibrotactile stimuli are also visually presented | o major concerns o minor concerns o no concerns o measurement necessary | |
| 19 | Warning messages should orient the user towards the source of danger. | |
| + warning messages lead to an orienting response to the source of danger, causing the driver to look in the direction of the hazard + warning messages to not focus the driver’s attention to a display | o major concerns o minor concerns o no concerns o measurement necessary | |
| 20 | In case of sensor failures, their consequences and required operator steps should be displayed. | |
| + unavailability of sub-systems because of sensor degradation is displayed + consequences of sensor degradation are displayed + required operator behavior is displayed | o major concerns o minor concerns o no concerns o measurement necessary | |
References
- National Highway Traffic Safety Administration. Automated Driving Systems 2.0: A Vision for Safety; NHTSA: Washington, DC, USA, 2017.
- Naujoks, F.; Hergeth, S.; Wiedemann, K.; Schömig, N.; Forster, Y.; Keinath, A. Test procedure for evaluating the human–machine interface of vehicles with automated driving systems. Traffic Inj. Prev. 2019, 20, 146–151. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Naujoks, F.; Hergeth, S.; Wiedemann, K.; Schömig, N.; Keinath, A. Use cases for assessing, testing, and validating the human machine interface of automated driving systems. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Philadelphia, PA, USA, 1–5 October 2018. [Google Scholar]
- Nielsen, J. Usability Engineering; Academic Press: Boston, MA, USA, 1993. [Google Scholar]
- Naujoks, F.; Wiedemann, K.; Schömig, N.; Hergeth, S.; Keinath, A. Towards guidelines and verification methods for automated vehicle HMIs. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 121–136. [Google Scholar] [CrossRef]
- Naujoks, F.; Hergeth, S.; Keinath, A.; Wiedemann, K.; Schömig, N. Development and application of an expert based assessment for evaluating the usability of SAE Level 3 ADS HMIs. In Proceedings of the ESV Conference 2019, Eindhoven, The Netherlands, 10–13 June 2019. [Google Scholar]
- RESPONSE Consortium. Code of Practice for the Design and Evaluation of ADAS; RESPONSE 3: A PReVENT Project; 2006. Available online: https://www.acea.be/uploads/publications/20090831_Code_of_Practice_ADAS.pdf (accessed on 21 April 2020).
- ISO 26262. Road Vehicles Functional Safety; International Organization for Standardization: Geneva, Switzerland, 2008. [Google Scholar]
- UN ECE R79: Uniform Provisions Concerning the Approval of Vehicles with Regard to Steering Equipment. 2017. Available online: https://www.unece.org/fileadmin/DAM/trans/main/wp29/wp29regs/2017/R079r3e.pdf (accessed on 21 April 2020).
- Hoff, K.A.; Bashir, M. Trust in Automation: Integrating Empirical Evidence on Factors That Influence Trust. Hum. Factors 2015, 57, 407–434. [Google Scholar] [CrossRef] [PubMed]
- Wickens, C.D. Processing resources in attention. In Varieties of Attention; Parasuraman, R., Davies, R., Eds.; Academic Press: New York, NY, USA, 1984; pp. 63–101. [Google Scholar]
- UNECE. Uniform Provisions Concerning the Approval of Vehicles with Regard to Automated Lane Keeping System. Informal Document ACSF-25-03. Available online: https://wiki.unece.org/download/attachments/92013066/ACSF-25-23%20%28Chairs%29%20Draft%20UN%20Regulation%20for%20ALKS%20for%20GRVA.pdf?api=v2 (accessed on 18 February 2020).
- Linja-aho, M. Creating a framework for improving the learnability of a complex system. Hum. Technol. 2006, 2, 202–224. [Google Scholar] [CrossRef]
- Borojeni, S.S.; Chuang, L.; Heuten, W.; Boll, S. Assisting Drivers with Ambient Take-Over Requests in Highly Automated Driving. In Automotive’ UI: Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications; Association for Computing Machinery: New York, NY, USA, 2016; pp. 237–244. [Google Scholar]
- ANSI Z535.4-2011 (R2017). American National Standard for Product Safety Signs and Labels. Available online: https://webstore.ansi.org/preview-pages/NEMA/preview_ANSI+Z535.4-2011+(R2017).pdf (accessed on 18 February 2020).





| # | Item |
|---|---|
| 1 | Unintentional activation and deactivation should be prevented |
| 2 | The system mode should be displayed continuously |
| 3 | Mode changes should be effectively communicated |
| 4 | Visual interfaces used to communicate system states should be mounted to a suitable position and distance. High-priority information should be presented close to the driver’s expected line of sight |
| 5 | HMI elements should be grouped together according to their function to support the perception of mode indicators |
| 6 | Time-critical interactions with the system should not afford continuous attention |
| 7 | The visual interface should have a sufficient contrast in luminance and/or color between foreground and background |
| 8 | Texts (e.g., font types and size of characters) and symbols should be easily readable from the permitted seating position |
| 9 | Commonly accepted or standardized symbols should be used to communicate the automation mode. Use of non-standard symbols should be supplemented by additional text explanations |
| 10 | The semantic of a message should be in accordance with its urgency |
| 11 | Messages should be conveyed using the language of the users (e.g., national language, avoidance of technical language, use of common syntax) |
| 12 | Text messages should be as short as possible |
| 13 | Not more than five colors should be consistently used to code system states (excluding white and black) |
| 14 | The colors used to communicate system states should be in accordance with common conventions and stereotypes |
| 15 | Design for color-blindness by redundant coding and avoidance of red/green and blue/yellow combinations |
| 16 | Auditory output should raise the attention of the driver without startling her/him or causing pain |
| 17 | Auditory and vibrotactile output should be adapted to the urgency of the message |
| 18 | High-priority messages should be multimodal |
| 19 | Warning messages should orient the user towards the source of danger |
| 20 | In case of sensor failures, their consequences and required operator steps should be displayed |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schömig, N.; Wiedemann, K.; Hergeth, S.; Forster, Y.; Muttart, J.; Eriksson, A.; Mitropoulos-Rundus, D.; Grove, K.; Krems, J.; Keinath, A.; et al. Checklist for Expert Evaluation of HMIs of Automated Vehicles—Discussions on Its Value and Adaptions of the Method within an Expert Workshop. Information 2020, 11, 233. https://doi.org/10.3390/info11040233
Schömig N, Wiedemann K, Hergeth S, Forster Y, Muttart J, Eriksson A, Mitropoulos-Rundus D, Grove K, Krems J, Keinath A, et al. Checklist for Expert Evaluation of HMIs of Automated Vehicles—Discussions on Its Value and Adaptions of the Method within an Expert Workshop. Information. 2020; 11(4):233. https://doi.org/10.3390/info11040233
Chicago/Turabian StyleSchömig, Nadja, Katharina Wiedemann, Sebastian Hergeth, Yannick Forster, Jeffrey Muttart, Alexander Eriksson, David Mitropoulos-Rundus, Kevin Grove, Josef Krems, Andreas Keinath, and et al. 2020. "Checklist for Expert Evaluation of HMIs of Automated Vehicles—Discussions on Its Value and Adaptions of the Method within an Expert Workshop" Information 11, no. 4: 233. https://doi.org/10.3390/info11040233
APA StyleSchömig, N., Wiedemann, K., Hergeth, S., Forster, Y., Muttart, J., Eriksson, A., Mitropoulos-Rundus, D., Grove, K., Krems, J., Keinath, A., Neukum, A., & Naujoks, F. (2020). Checklist for Expert Evaluation of HMIs of Automated Vehicles—Discussions on Its Value and Adaptions of the Method within an Expert Workshop. Information, 11(4), 233. https://doi.org/10.3390/info11040233