An Improved Traffic Congestion Monitoring System Based on Federated Learning

Abstract
:1. Introduction
- The high-resolution remote sensing data are classified—they cannot be processed using the usual deep learning methods which may lead to data leakage, and data privacy is one of the major concerns of this system.
- There are many causes of road traffic congestion such as traffic accidents, traffic control, and some emergencies, which lead to difficulties in determining current traffic situations.
- How to select appropriate remote sensing images as training samples is another problem. Remote sensing images need to cover road areas and make the vehicle targets clear enough.
- Choosing a suitable neural network model based on the characteristics of targets in remote sensing images is also a problem.
- This system uses remote sensing data as a data source for congestion analysis, which solves the problem of the inadequate coverage of the traffic monitoring system.
- Due to the huge amount of data processing, the system uses the MobileNet convolutional neural network to solve the problem that each picture needs to have multiple targets that need to be detected.
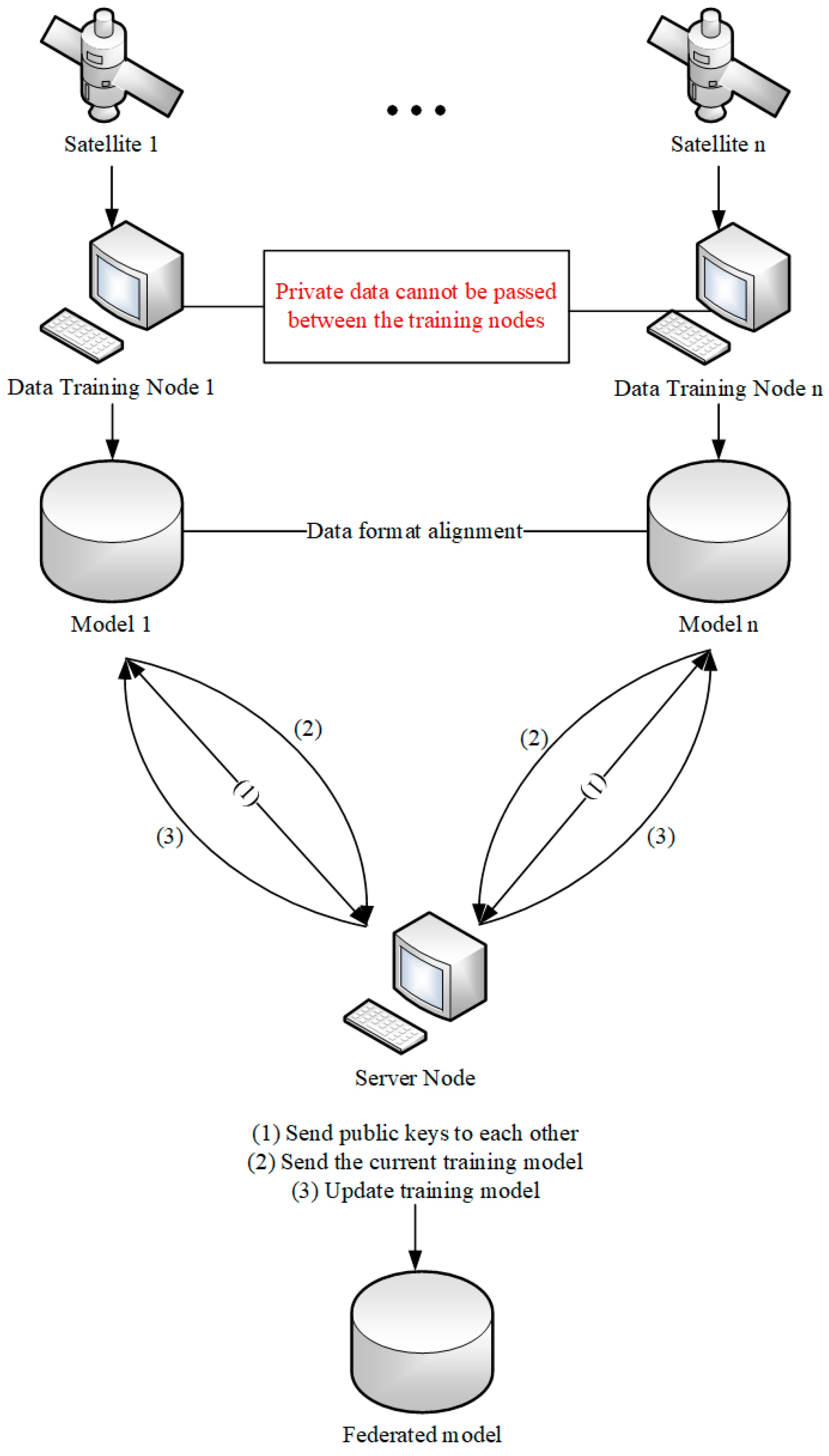
- The system proposes federated learning on the basis of deep learning to solve the data protection problem, which is an implicit but high-risk problem. The node data model generated by federated learning solves the problems of the inaccurate training results of single-node remote sensing data and slow training speed.
2. Related Work
2.1. Application of Target Detection and Deep Learning in Remote Sensing
2.2. Implemented Traffic Congestion Monitoring
- The traffic congestion monitoring system implemented by hardware is mainly due to the high cost of hardware [13,15,19,20], and it is difficult to cover the vast economically underdeveloped areas, resulting in a limited monitoring range. Take the most commonly used road video surveillance system [13] as an example—even if there are multiple cameras at an intersection, each camera has a limited view and a limited visual distance. If the views of multiple cameras are spliced together, the results are not necessarily continuous. Therefore, the deployment of video surveillance systems in real life often fails to achieve ideal results, and there will always be blind corners.
- Compared with the congestion monitoring algorithm implemented by software, the study highlights the characteristics of the wide coverage of remote sensing data and high accuracy of the target detection algorithm.
- Compared with the hardware implementation method, the study only uses remote sensing images, and the cost is much lower than that of the hardware equipment.
- Compared with the general deep learning methods based on remote sensing images, the study highlights the use of federated learning to solve the data security problem of remote sensing data training.
3. Methods
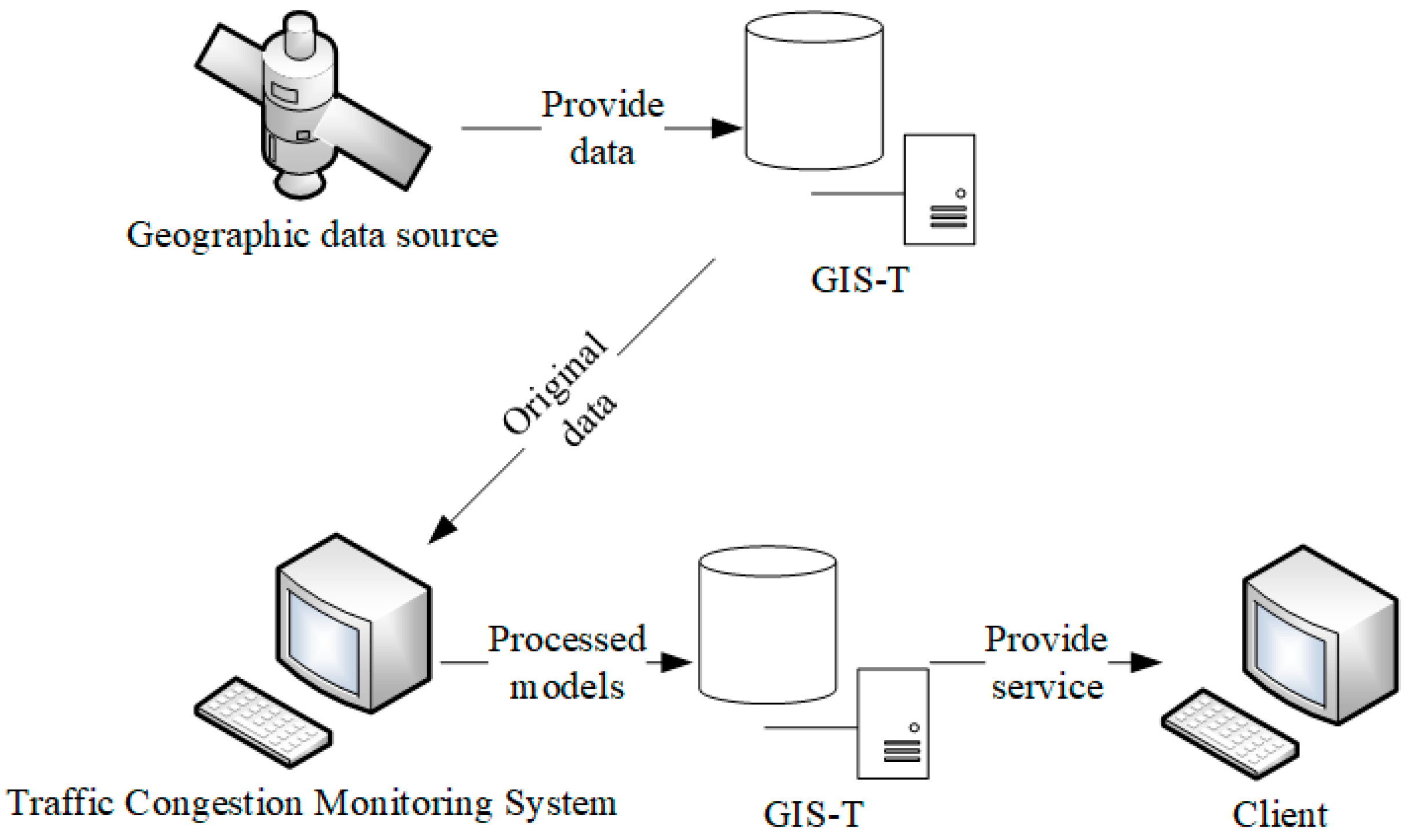
3.1. Geographic Information System for Transportation
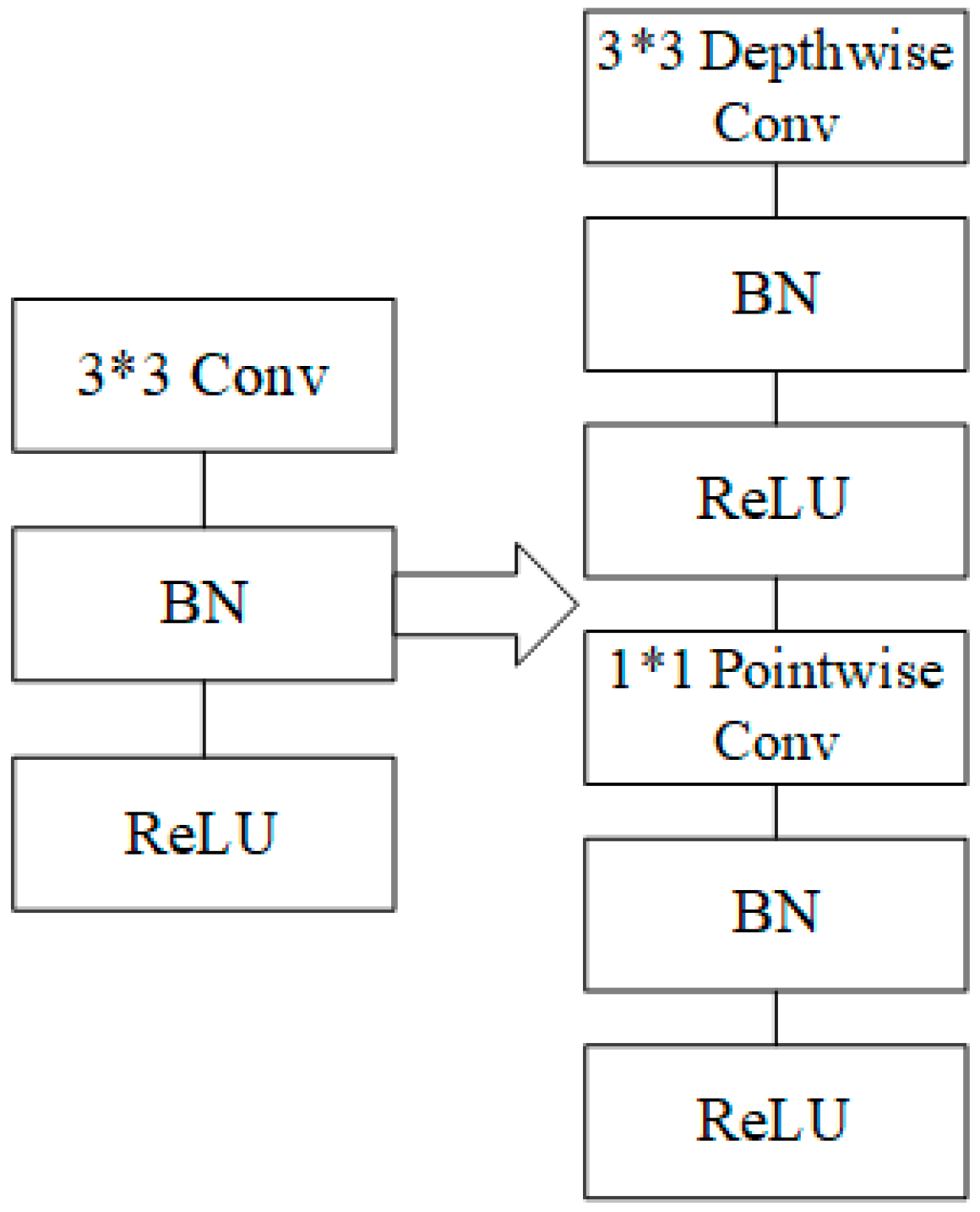
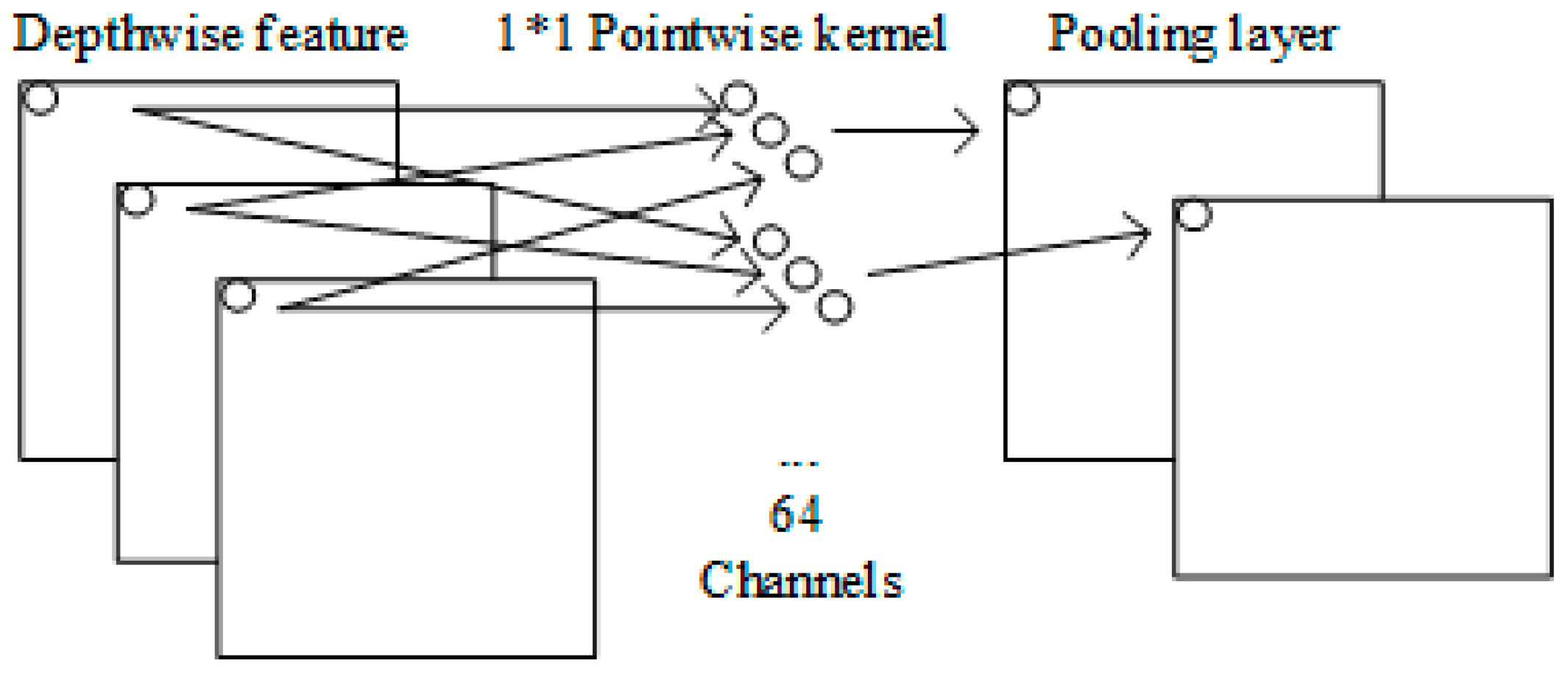
3.2. Convolutional Neural Network
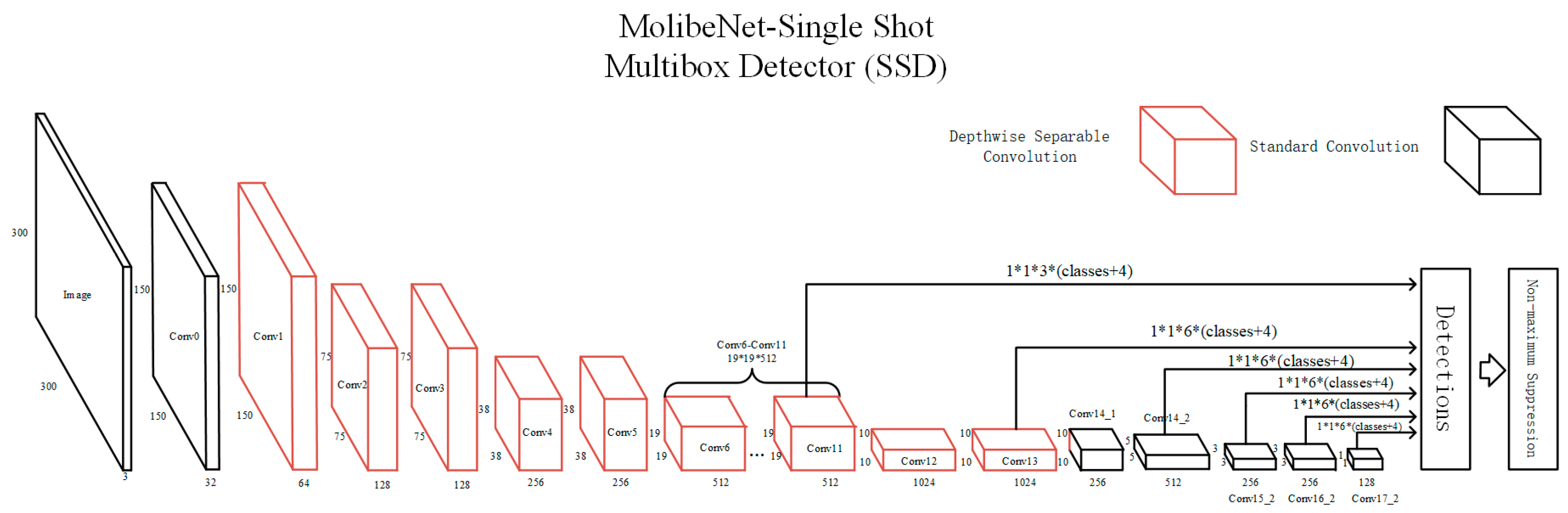
3.3. Single Shot Multibox Detector
3.4. Federated Learning
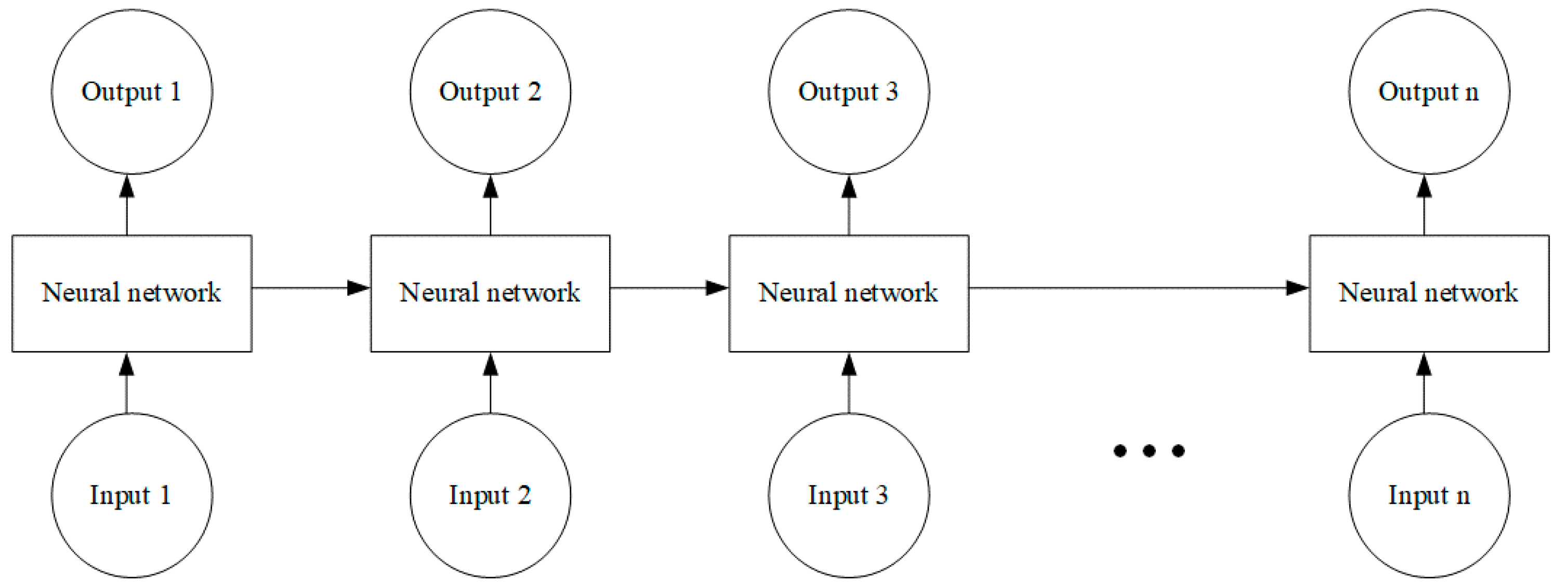
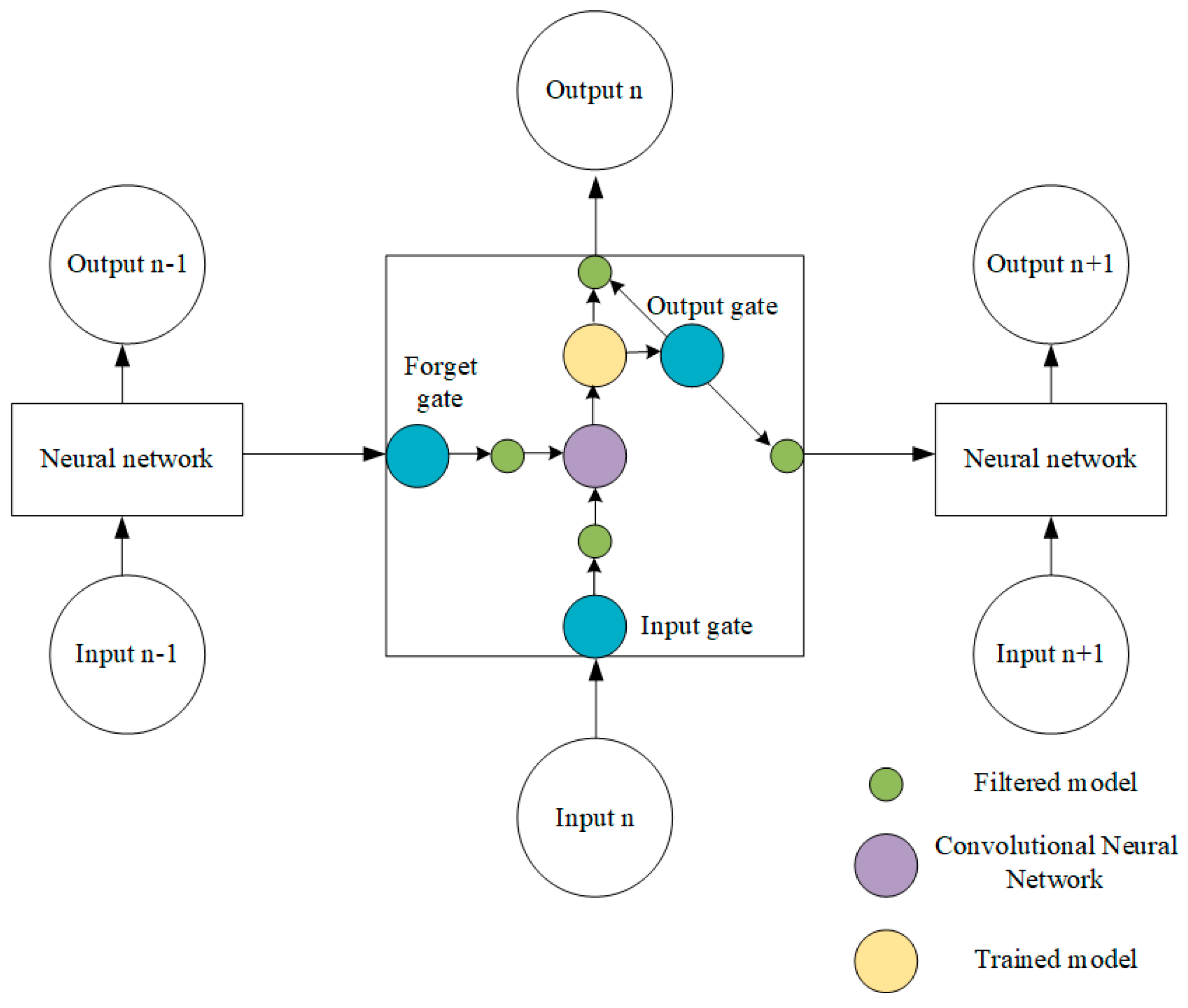
3.5. Long Short-Term Memory Neural Network
4. System Implementation
4.1. Remote Sensing Data
4.2. PaddlePaddle Framework
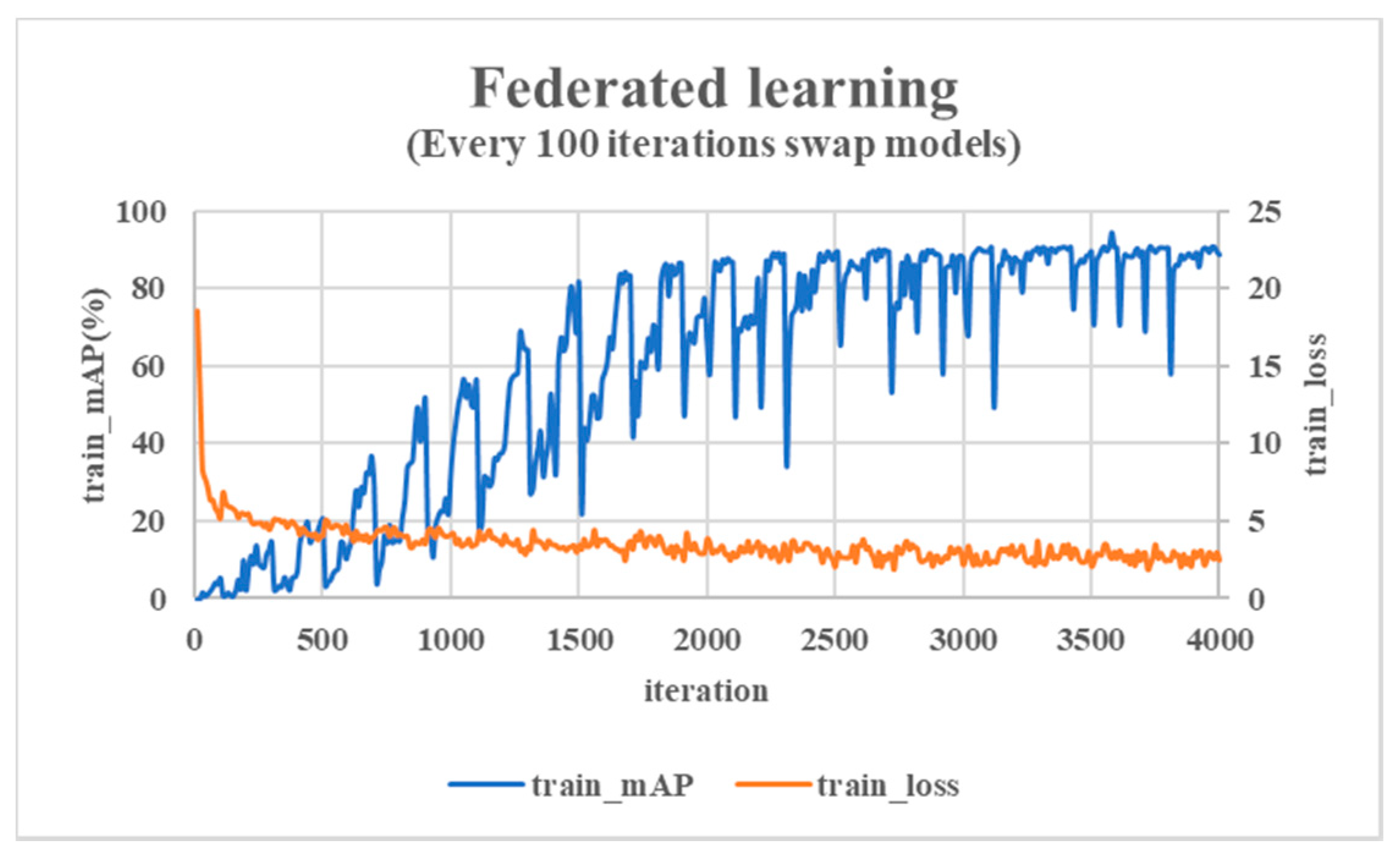
4.3. Federated Learning Simulation Training Process
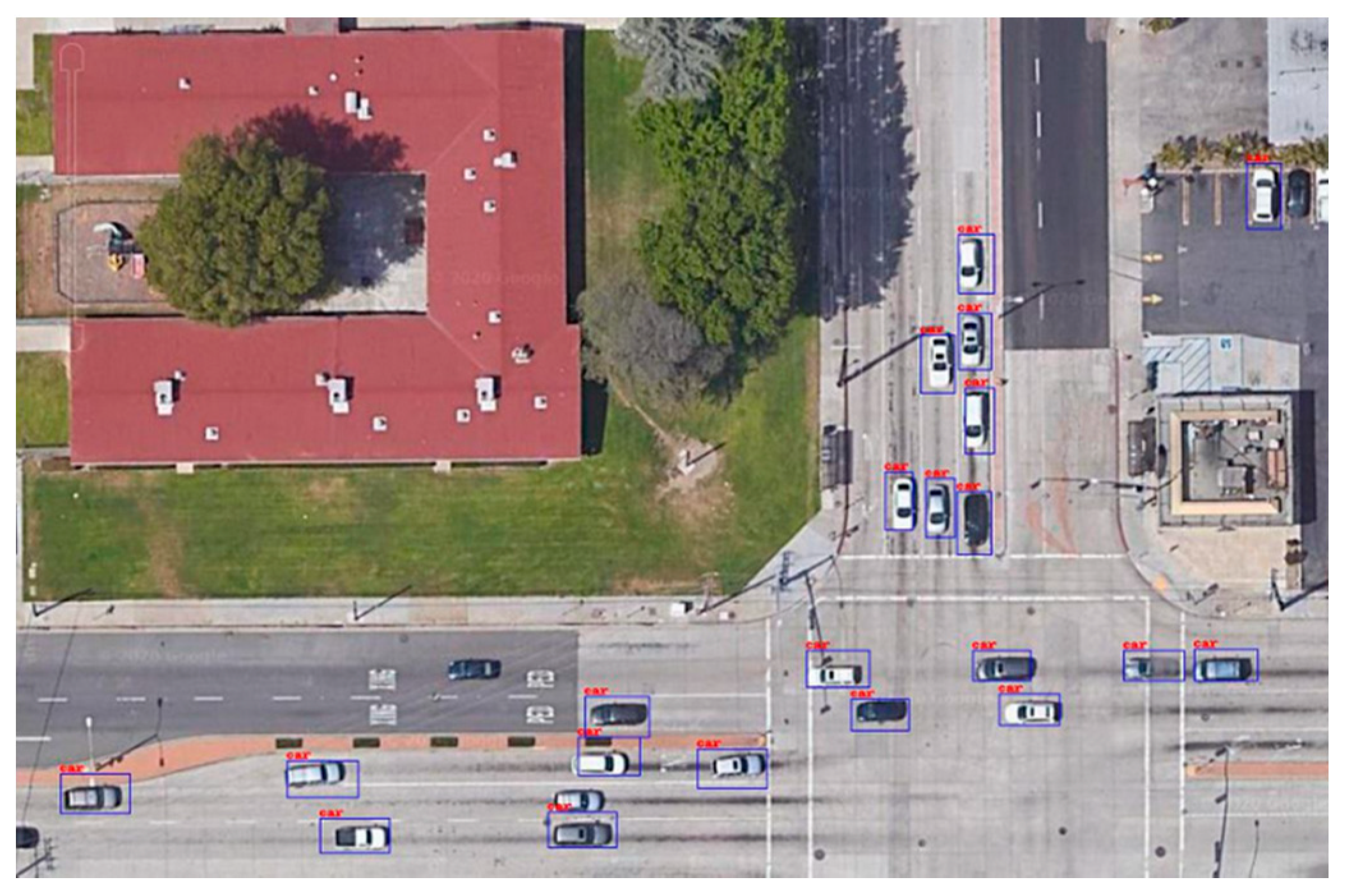
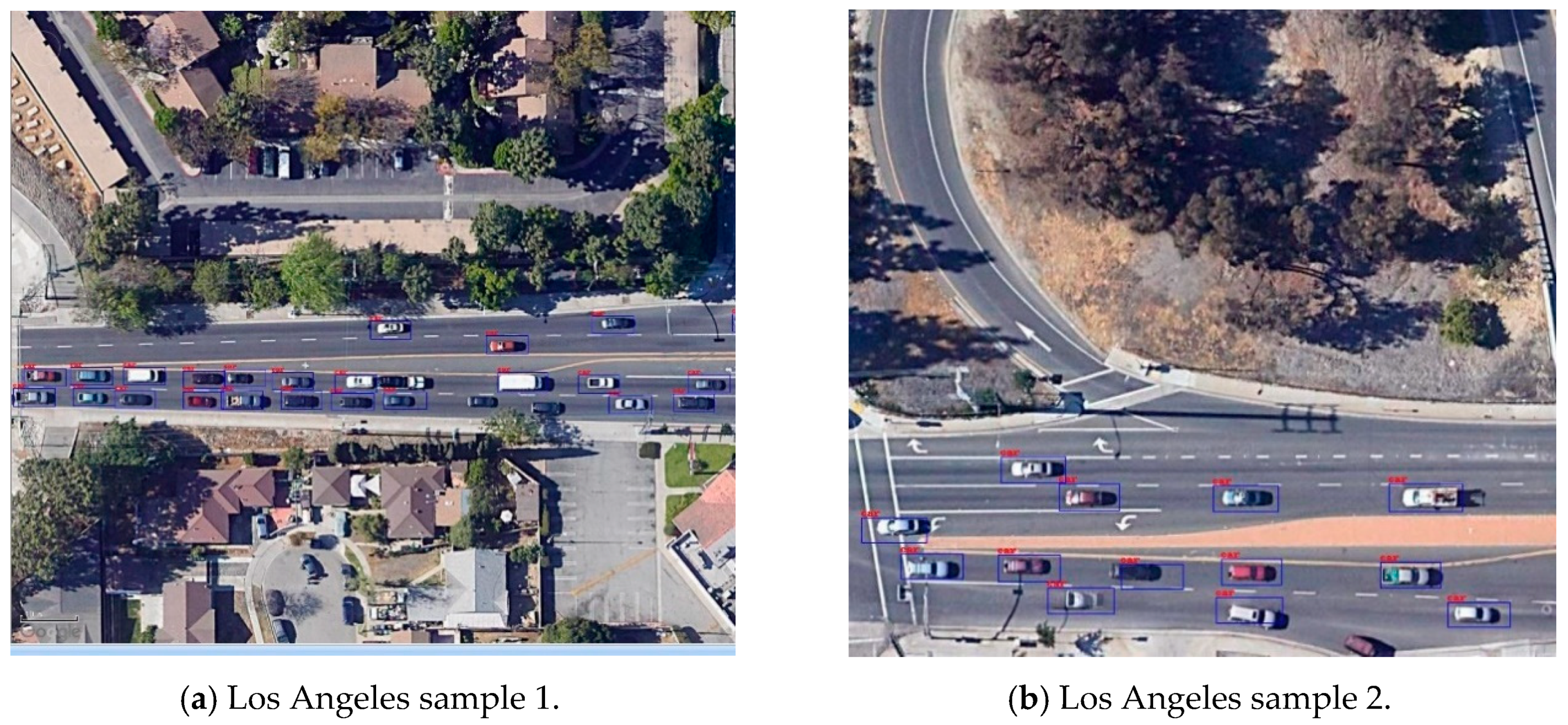
4.4. Prediction
5. Experimental Result
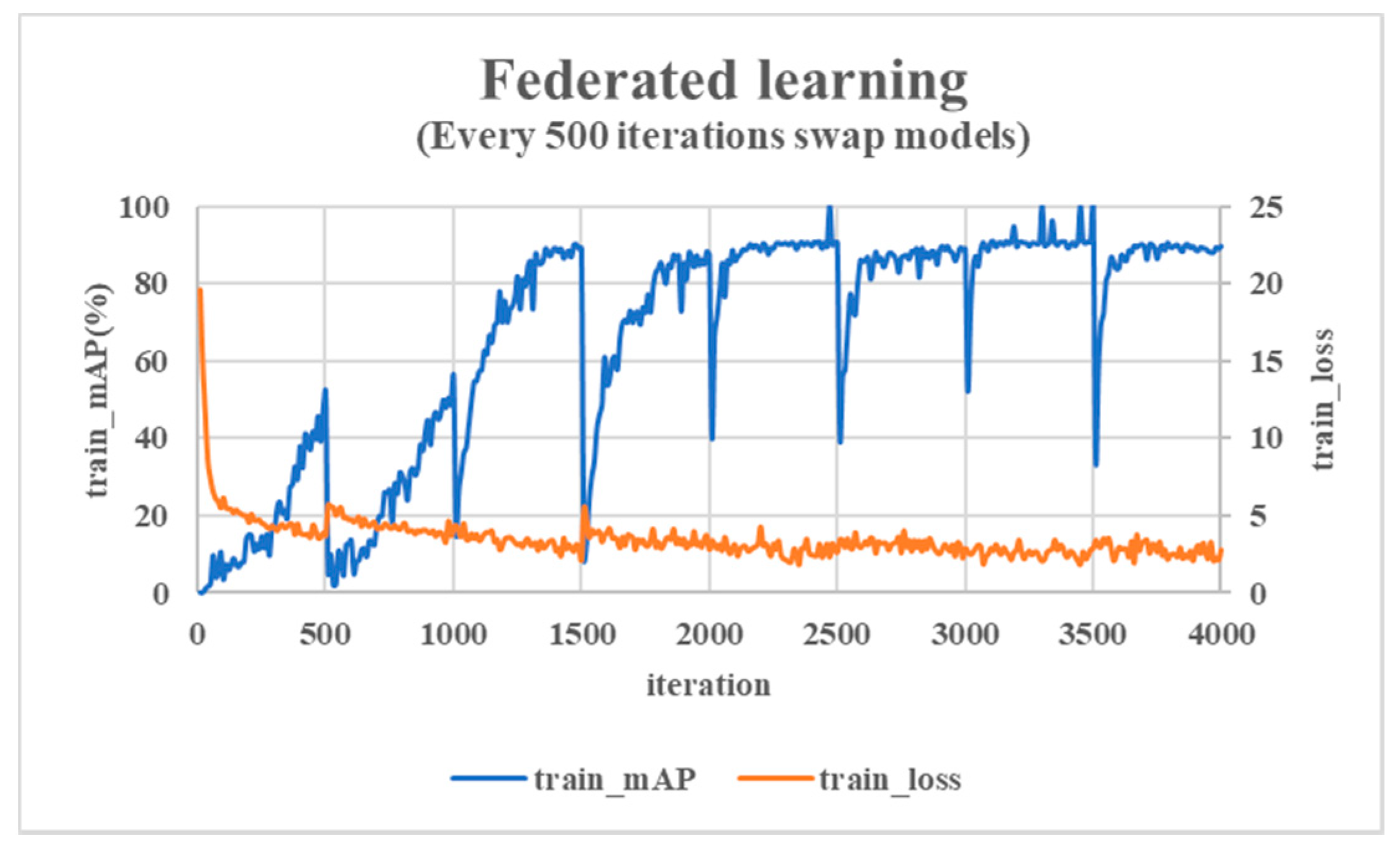
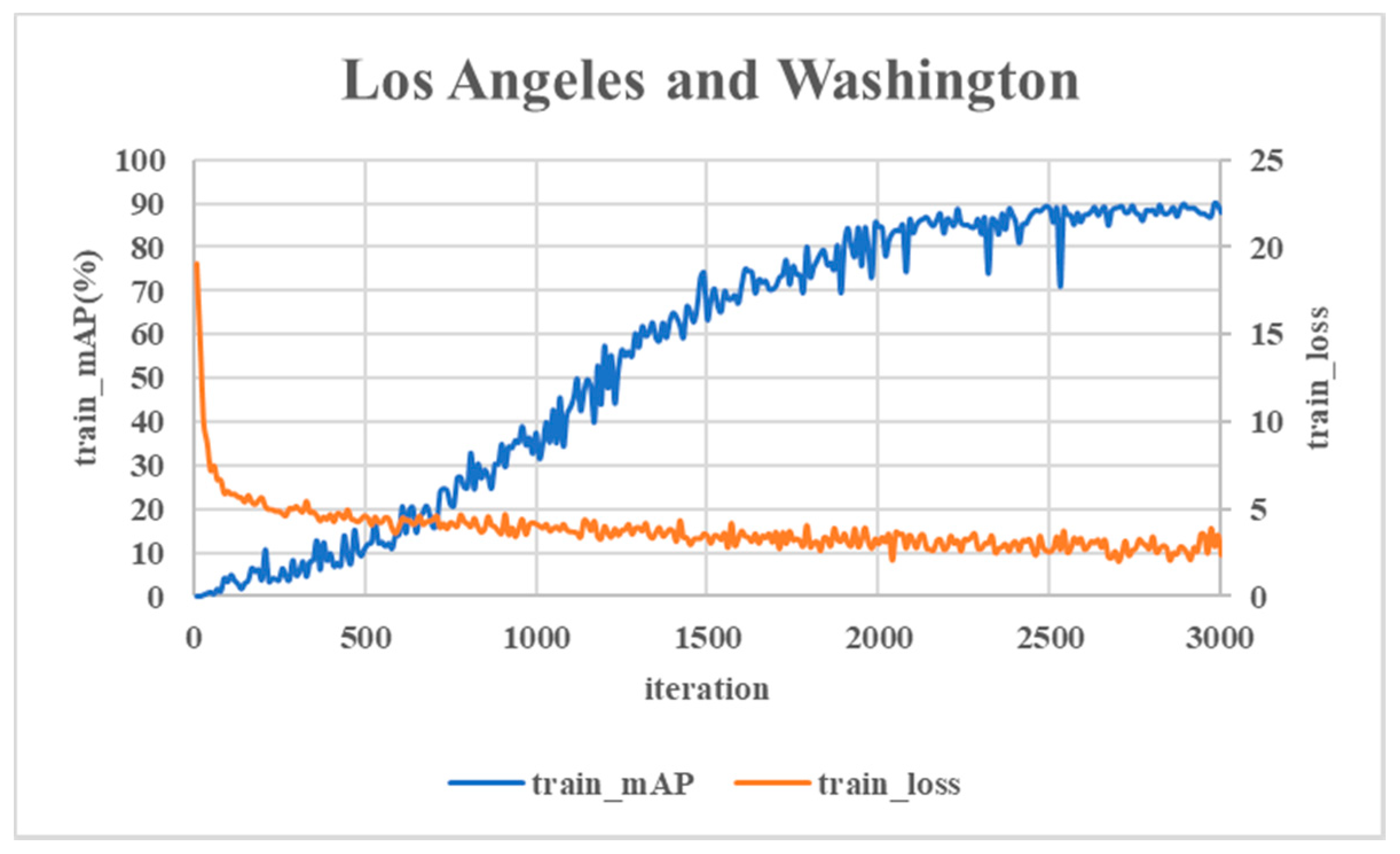
5.1. Experimental Result
5.2. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- INRIX 2019 Global Traffic Scorecard. Available online: https://inrix.com/scorecard/ (accessed on 20 March 2020).
- Qureshi, K.N.; Abdullah, A.H.; Altameem, A. Road aware geographical routing protocol coupled with distance, direction and traffic density metrics for urban vehicular ad hoc networks. Wirel. Pers. Commun. 2017, 92, 1251–1270. [Google Scholar] [CrossRef]
- United States Infrared Satellite. Available online: https://www.wunderground.com/maps/satellite/regional-infrared (accessed on 20 February 2020).
- Zambanini, S.; Loghin, A.M.; Pfeifer, N.; Màrmol Soley, E.; Sablatnig, R. Detection of parking cars in stereo satellite images. Remote Sens. 2020, 12, 2170. [Google Scholar] [CrossRef]
- Scholtz, R.; Prentice, J.; Tang, Y.; Twidwell, D. Improving on MODIS MCD64A1 burned area estimates in grassland systems: A case study in kansas flint hills tall grass prairie. Remote Sens. 2020, 12, 2168. [Google Scholar] [CrossRef]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine learning in geosciences and remote sensing. Geosci. Front. 2016, 7, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Pelletier, C.; Valero, S.; Inglada, J.; Champion, N.; Gérard, D. Assessing the robustness of random forests to map land cover with high resolution satellite image time series over large areas. Remote Sens. Environ. 2016, 187, 156–168. [Google Scholar] [CrossRef]
- Boulze, H.; Korosov, A.; Brajard, J. Classification of sea ice types in Sentinel-1 SAR data using convolutional neural networks. Remote Sens. 2020, 12, 2165. [Google Scholar] [CrossRef]
- Daniel, L.; Lang, N.; van Doorn, N.S.; Aodha, O.M.; Perona, P.; Wegner, J.D. Geocoding of trees from street addresses and street-level images. arXiv 2020, arXiv:2002.01708. [Google Scholar]
- Jie, C.; Huang, H.; Peng, J.; Zhu, J.; Chen, L.; Li, W.; Sun, B.; Li, H. Convolution neural network architecture learning for remote sensing scene classification. arXiv 2020, arXiv:2001.09614. [Google Scholar]
- Alhichri, H.; Alajlan, N.; Bazi, Y.; Rabczuk, T. Multi-scale convolutional neural network for remote sensing scene classification. In Proceedings of the 2018 IEEE International Conference on Electro/Information Technology (EIT), Rochester, MI, USA, 3–5 May 2018; pp. 1–5. [Google Scholar]
- ENVI. Available online: https://www.harrisgeospatial.com/Software-Technology/ENVI (accessed on 10 November 2019).
- Wang, H. Research on Traffic Congestion Discrimination Method Based on Road Surveillance Video. Ph.D. Thesis, Nanjing University of Posts and Telecommunications, Jiangsu, China, 2015. [Google Scholar]
- Zhang, X.; Hu, S.; Zhang, H.; Hu, X. A real-time multiple vehicle tracking method for traffic congestion identification. KSII Trans. Internet Inf. Syst. 2016, 10, 2483–2503. [Google Scholar]
- Chen, Y. OBD-based traffic congestion operation monitoring and optimization technology for urban road intersections. Intell. Build. Smart City 2019, 8. Available online: http://www.doc88.com/p-14259454201308.html (accessed on 15 July 2020).
- Shenzhen institute of advanced technology. A Method for Determining Urban Traffic Congestion. C.N. Patent 201310684462.5, 9 April 2014.
- Sen, R.; Siriah, P.; Raman, B. RoadSoundSense: Acoustic sensing based road congestion monitoring in developing regions. In Proceedings of the 2011 8th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, Salt Lake City, UT, USA, 27–30 January 2011; pp. 125–133. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.; Chen, F.; Qian, Z. Road traffic congestion monitoring in social media with hinge-loss markov random fields. In Proceedings of the 2014 IEEE International Conference on Data Mining, Shenzhen, China, 14–17 December 2014; pp. 80–89. [Google Scholar] [CrossRef]
- Del Arco, E.; Morgado, E.; Ramiro-Bargueño, J.; Mora-Jiménez, I.; Caamaño, A.J. Vehicular Sensor Networks in congested traffic: Linking STV field reconstruction and communications channel. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 606–613. [Google Scholar] [CrossRef]
- Mandal, K.; Sen, A.; Chakraborty, A.; Roy, S.; Batabyal, S.; Bandyopadhyay, S. Road traffic congestion monitoring and measurement using active RFID and GSM technology. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1375–1379. [Google Scholar] [CrossRef]
- Ober-Sundermeier, A.; Zackor, H. Prediction of congestion due to road works on freeways, ITSC 2001. In Proceedings of the 2001 IEEE Intelligent Transportation Systems. Proceedings (Cat. No.01TH8585), Oakland, CA, USA, 25–29 August 2001; pp. 240–244. [Google Scholar] [CrossRef]
- Athanasios, Z.K.; Waller, S.T. An Internet-based geographic information system that integrates data, models and users for transportation applications. Transp. Res. Part C 2000, 8, 427–444. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, X.; Wang, G. Learning fine-grained features via a CNN tree for large-scale classification. Neurocomputing 2018, 275, 1231–1240. [Google Scholar] [CrossRef] [Green Version]
- Shao, H.; Liu, K.; Lin, C.; Lu, J. DotFAN: A domain-transferred face augmentation network for pose and illumination invariant face recognition. arXiv 2020, arXiv:2002.09859. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Wei, L.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.E.; Fu, C.; Berg, A.C. SSD: Single shot multibox detector. In Proceedings of the 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar]
- Qiang, Y.; Liu, Y.; Chen, T.; Tong, Y. Federated Machine Learning: Concept and Applications. arXiv 2019, arXiv:1902.04885. [Google Scholar]
- TensorFlow Federated. Available online: https://www.tensorflow.org/federated/ (accessed on 8 February 2020).
- Taniar, D.; Safar, M.; Tran, Q.T.; Rahayu, W.; Park, J.H. Spatial network RNN queries in GIS. Comput. J. 2011, 54, 617–627. [Google Scholar] [CrossRef]
- Sundermeyer, M.; Schlüter, R.; Ney, H. LSTM neural networks for language modeling. Interspeech 2012, in press. [Google Scholar] [CrossRef]
- Toon, B.; Antonio, M.; Juan, A.; Enrique, O.; Peter, H. A graph CNN-LSTM neural network for short and long-term traffic forecasting based on trajectory data. Transp. Res. Part C Emerg. Technol. 2020, 112, 62–77. [Google Scholar] [CrossRef]
- Google Earth. Available online: https://earth.google.com/ (accessed on 8 February 2020).
- Maxar. Available online: https://www.maxar.com/products (accessed on 10 November 2019).
- PaddlePaddle. Available online: https://www.paddlepaddle.org.cn/ (accessed on 7 January 2020).
- RMSProp. Available online: http://www.cs.toronto.edu/~tijmen/csc321/slides/lecture_slides_lec6.pdf (accessed on 10 March 2020).
- Hao, N.; Feng, Y.; Zhang, K.; Tian, G.; Zhang, L.; Jia, H. Evaluation of traffic congestion degree: An integrated approach. Int. J. Distrib. Sens. Netw. 2017, 13, 155014771772316. [Google Scholar] [CrossRef] [Green Version]
- Beijing Local Standard. Indices System of Urban Road Traffic Congestion Evaluation. DB11/T 785-2011. Beijing Municipal Bureau of Quality and Technical Supervision. Available online: https://wenku.baidu.com/view/0aca73d128ea81c758f57856.html (accessed on 25 March 2020).























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Clear | Basically Clear | Mild Congestion | Moderate Congestion | Severe Congestion |
|---|---|---|---|---|---|
| Fast road | V > 65 | 50 < V ≤ 65 | 35 < V ≤ 50 | 20 < V ≤ 35 | V ≤ 20 |
| Arterial road | V > 40 | 30 < V ≤ 40 | 20 < V ≤ 30 | 15 < V ≤ 20 | V ≤ 15 |
| Minor arterial road | V > 35 | 25 < V ≤ 35 | 15 < V ≤ 25 | 10 < V ≤ 15 | V ≤ 10 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, C.; Mao, Y. An Improved Traffic Congestion Monitoring System Based on Federated Learning. Information 2020, 11, 365. https://doi.org/10.3390/info11070365
Xu C, Mao Y. An Improved Traffic Congestion Monitoring System Based on Federated Learning. Information. 2020; 11(7):365. https://doi.org/10.3390/info11070365
Chicago/Turabian StyleXu, Chenming, and Yunlong Mao. 2020. "An Improved Traffic Congestion Monitoring System Based on Federated Learning" Information 11, no. 7: 365. https://doi.org/10.3390/info11070365
APA StyleXu, C., & Mao, Y. (2020). An Improved Traffic Congestion Monitoring System Based on Federated Learning. Information, 11(7), 365. https://doi.org/10.3390/info11070365