
Identification of Driving Safety Profiles in Vehicle to Vehicle Communication System Based on Vehicle OBD Information

 ,
,  ,
,  , ,
, ,  and
and 
Abstract
:1. Introduction
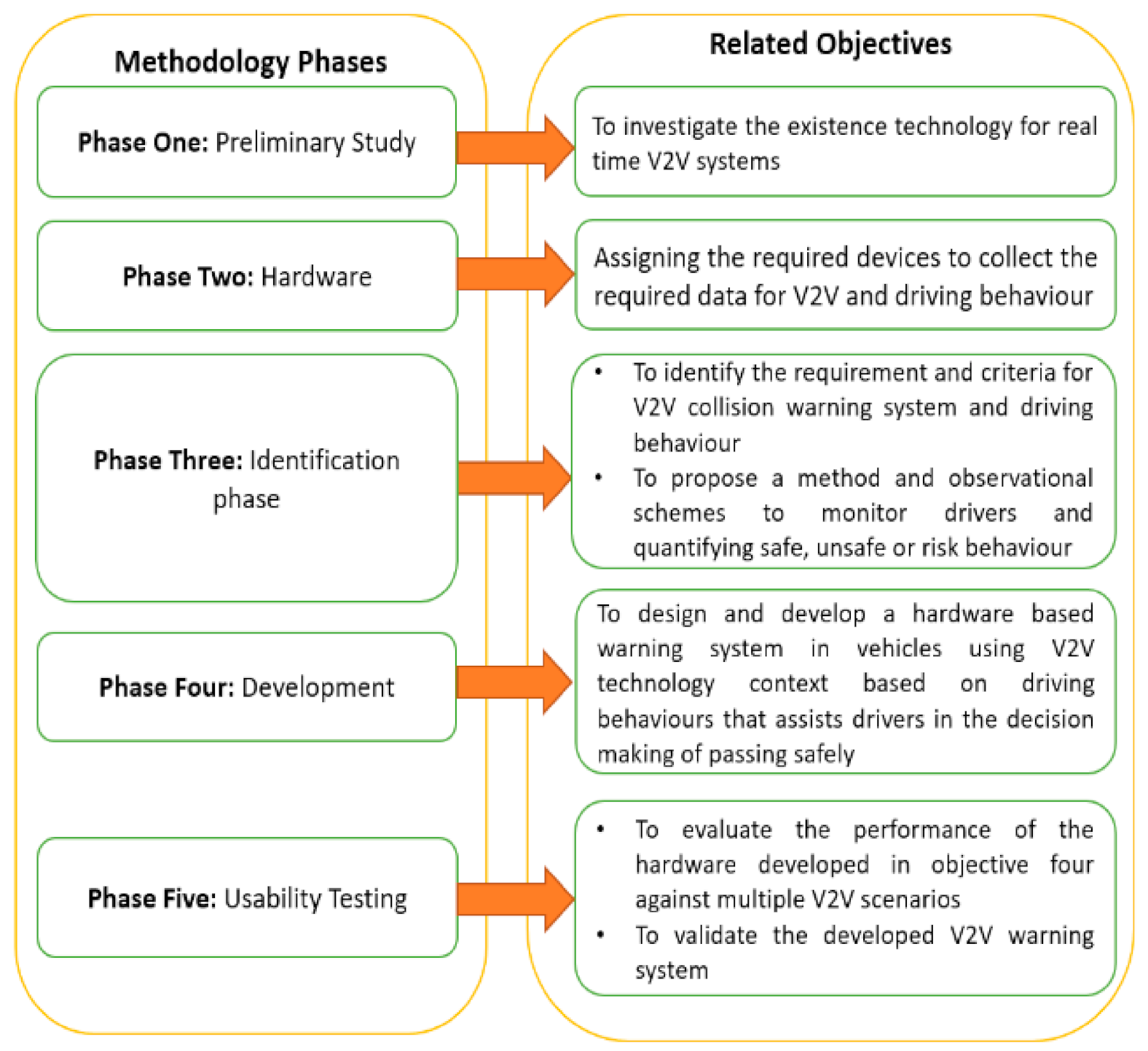
- To determine and collect all the requirements for the V2V and driving behavior experiments during acceleration/deceleration phases;
- To statistically classify then develop a method and observational schemes to quantifying safe or at-risk behavior based on driving behavior data collection;
- Monitoring and evaluating hardware-based warning systems in vehicles using V2V technology context based on driving behaviors that assist drivers in the decision-making of passing safely.
2. Related Work
3. Methodology
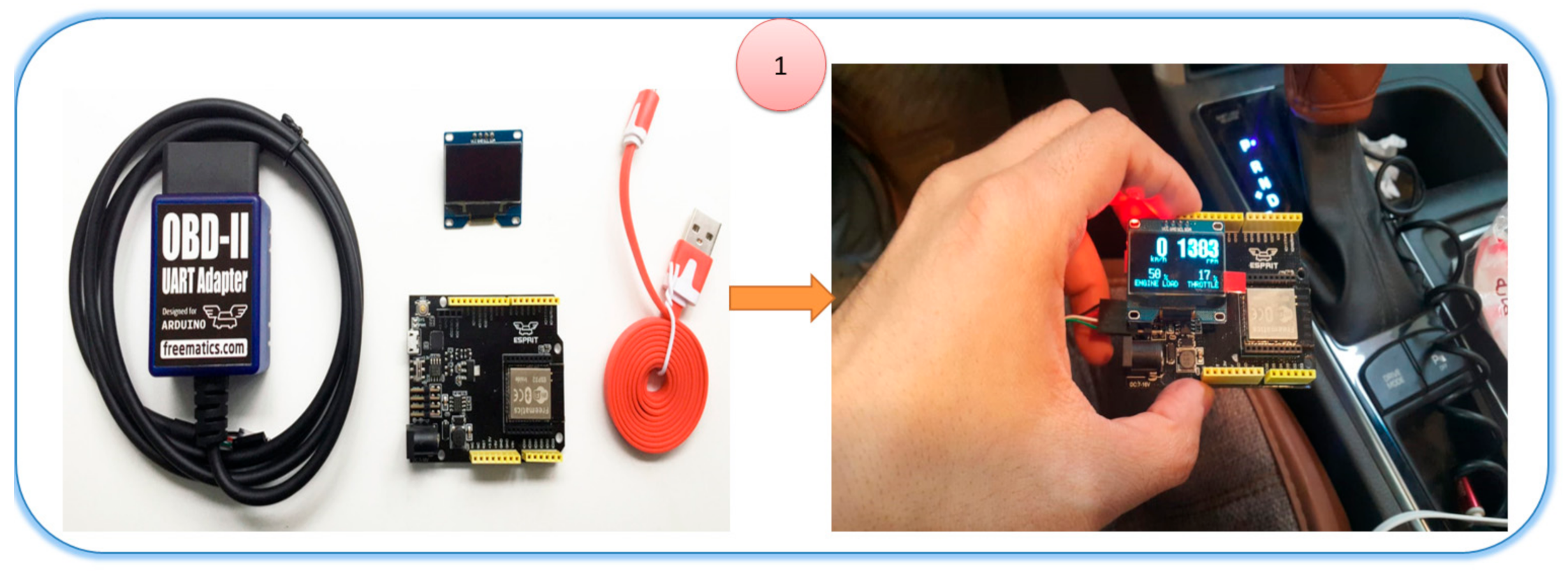
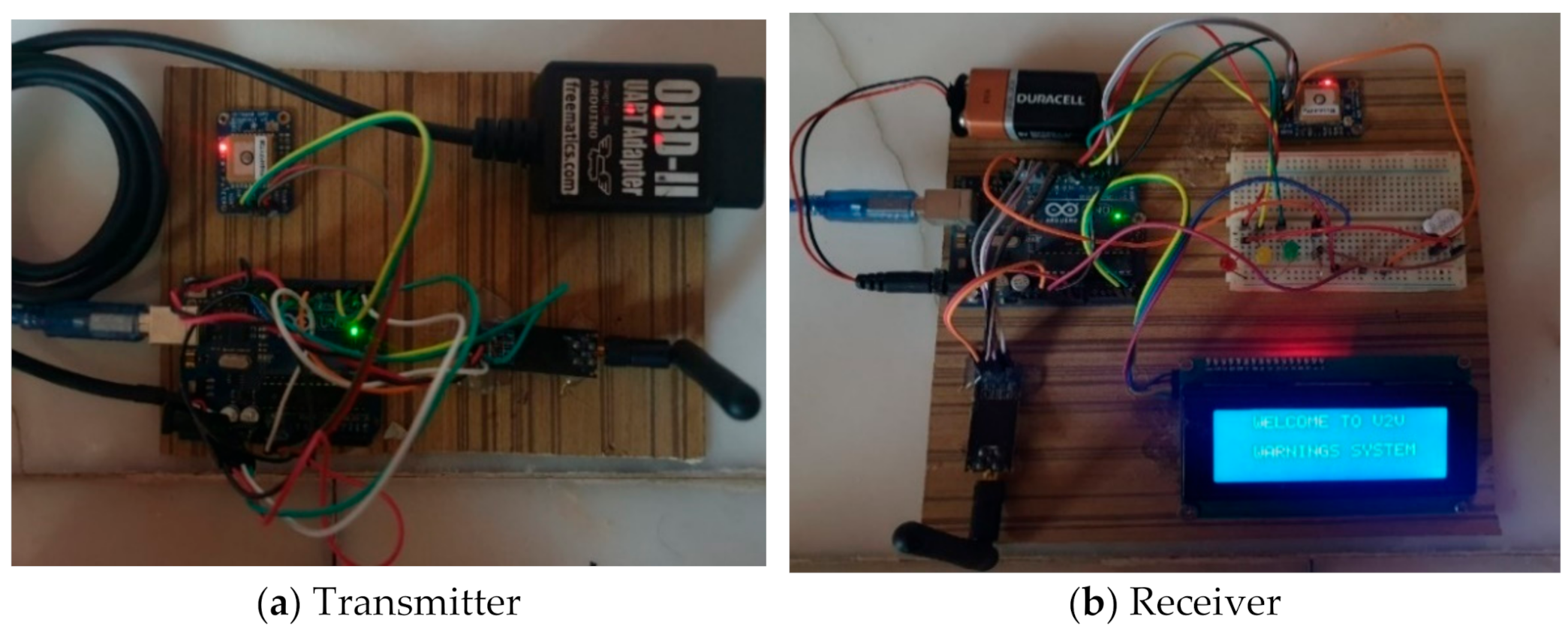
3.1. Hardware-Based Phase
3.2. Identification Phase
3.3. Development Phase
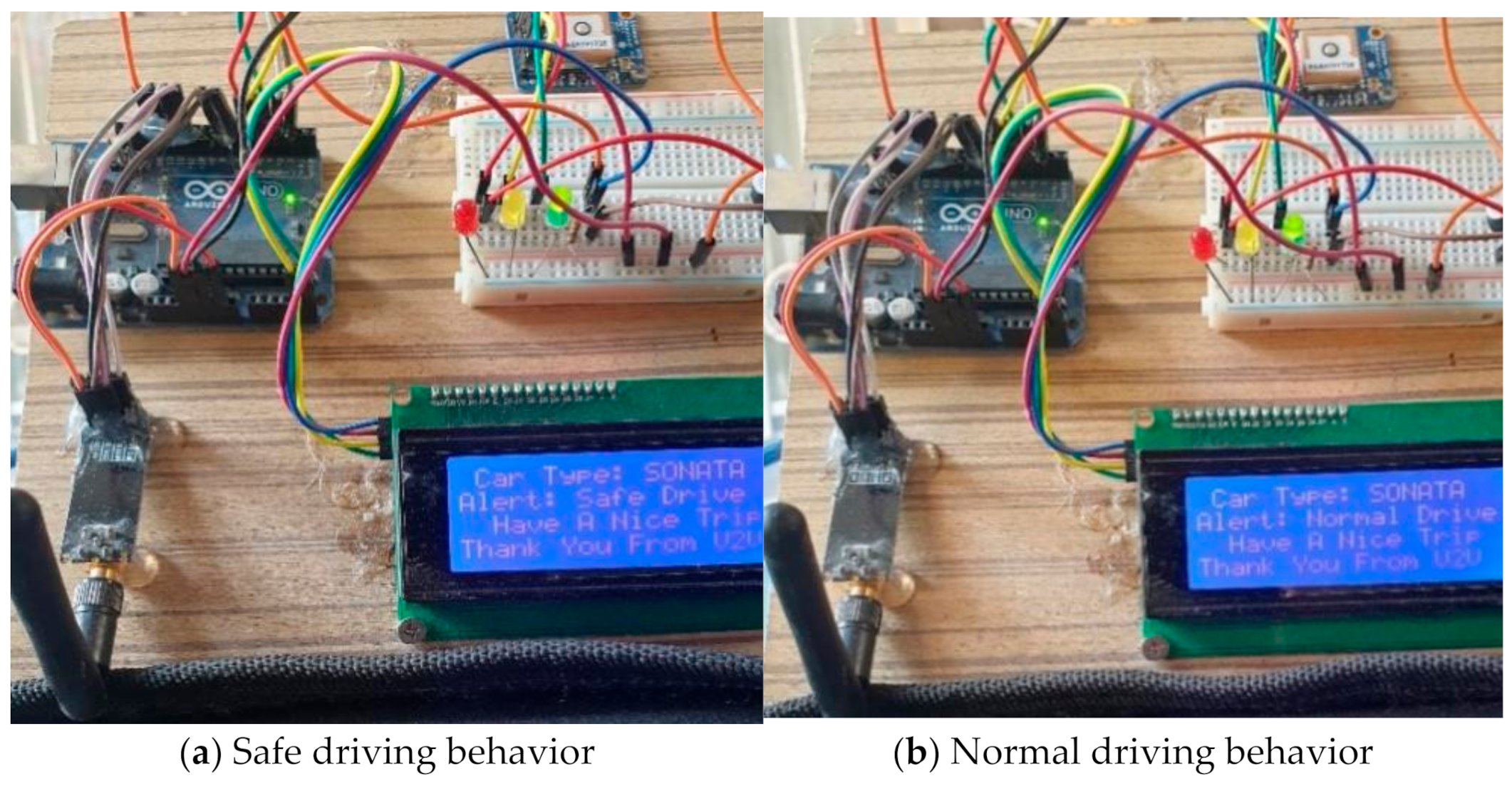
3.4. Validation Phase
4. Proposed System Algorithms
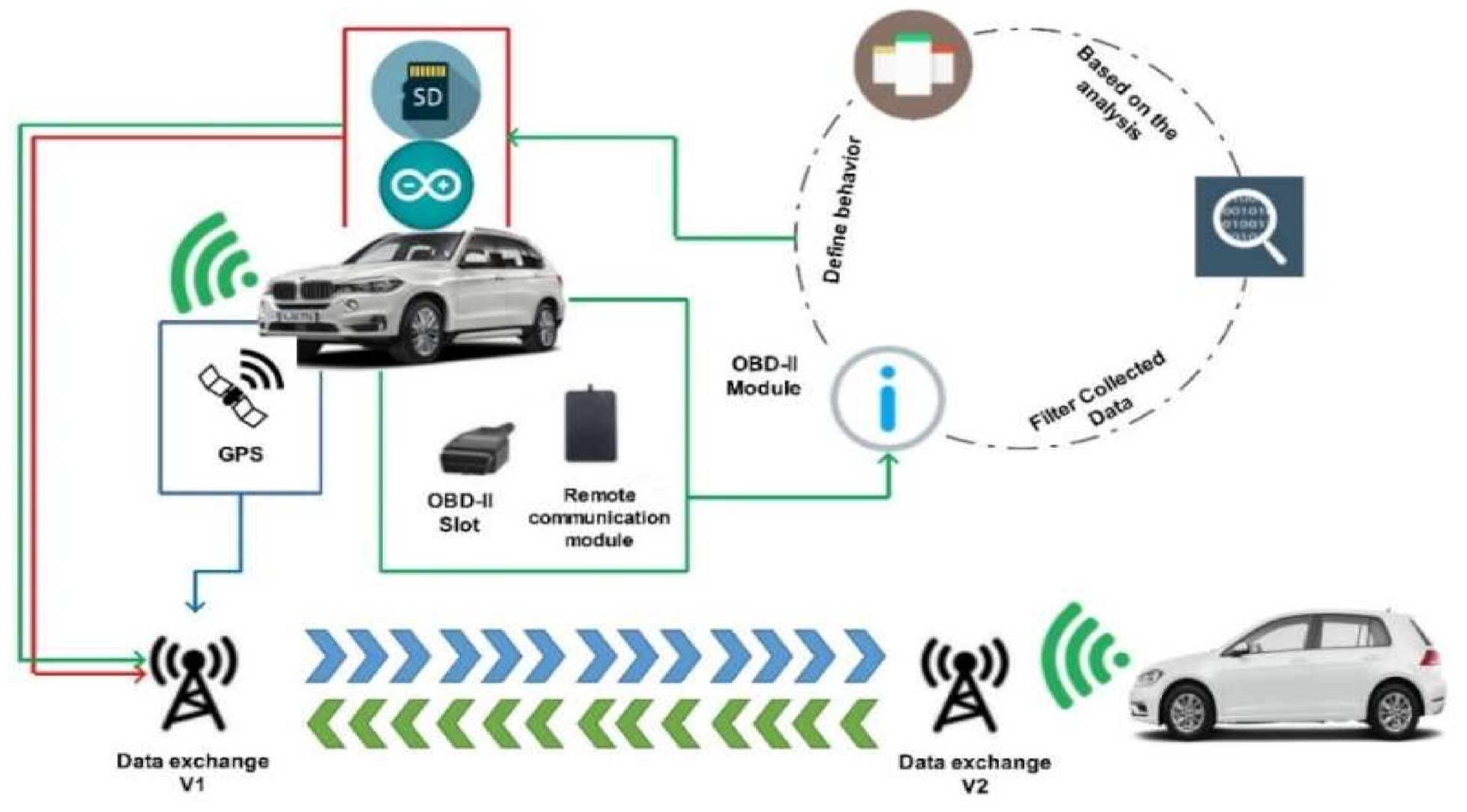
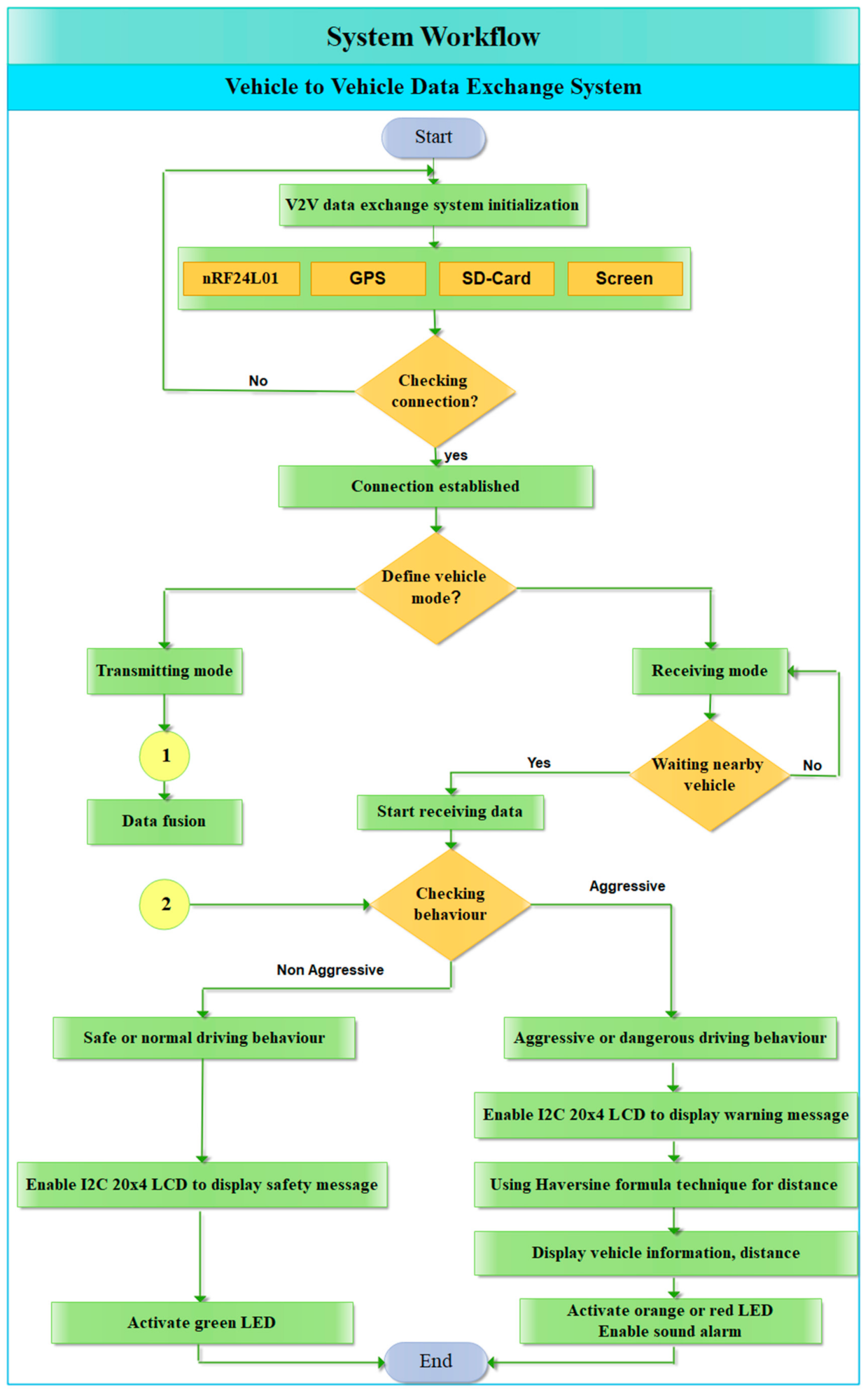
4.1. Algorithmic Procedures of the V2V Data Exchange
- The system defines the vehicle mode, whether in receiving or transmitting mode. In receiving, the nRF24L01 continues searching for vehicles within the selected vehicle’s coverage range. If one of any vehicles with abnormal behavior enters the field, the system automatically displays a warning message for the driver. The message can be auditory, visual, haptic, or a combination of any of these. The message does not deactivate until the algorithm confirms that a safe pass is possible.
- The system can estimate the location and the time required for each detected vehicle to reach the conflict point using a previously presented methodology using a haversine formula.
- The algorithm can recognize multiple vehicles, and the procedures outlined above are followed for each passing vehicle.
- In the case of transmitting mode, the system moves directly to the second stage of transmission. The method in each vehicle calculates and defines driving behavior. If any abnormal behavior is found in the vehicle, send reports about vehicle position and speed, route direction, traffic, and road conditions. The information is added to the network and serves as a safety warning for the other vehicles. Based on the four cases mentioned above, the V2V data exchange algorithm is described in Algorithm 1.
| Algorithm 1: V2V Data Exchange |
| begin |
| for V2V data exchange system do |
| 1. Initialize the nRF24L01 + PA/LNA transceiver module. |
| 2. Access the Adafruit Ultimate GPS Breakout System pre-conditions. |
| 3. Enable SD-Card every remaining plan, estimate its required resources. |
| 4. Initialize 20 × 4 I2C character LCD. |
| end for; |
| if (connection established successfully to the vehicle) then |
| while (vehicle in receiving mode) { |
| receiving data from vehicle in range = 1 |
| radio.openReadingPipe // enable V2V pipe using nRF24L01 + PA/LNA |
| radio.startListening(); // start receiving data |
| check received flag to define behaviour of the driving |
| while (flag= aggressive) { |
| 1. Calculate distance between vehicles. |
| Δlon = ; Δlat = ; |
| 2. Display vehicle information → (vehicle type) |
| Display warning message → (ATTENTION!!!) |
| Type of driver → (aggressive or dangerous) |
| Enable LED → (orange or red) |
| 3. Rinse the alarm to warn the driver. |
| end while; |
| } |
| while (flag= non-aggressive) { |
| Display type of driver → (safe or normal) |
| Enable LED → (green) |
| end while; |
| } |
| receiving data from the vehicle in range = 0 |
| break; |
| } |
| for each (vehicle in transmitting mode) do |
| enable data fusion |
| end for; |
| end if; |
| end; |
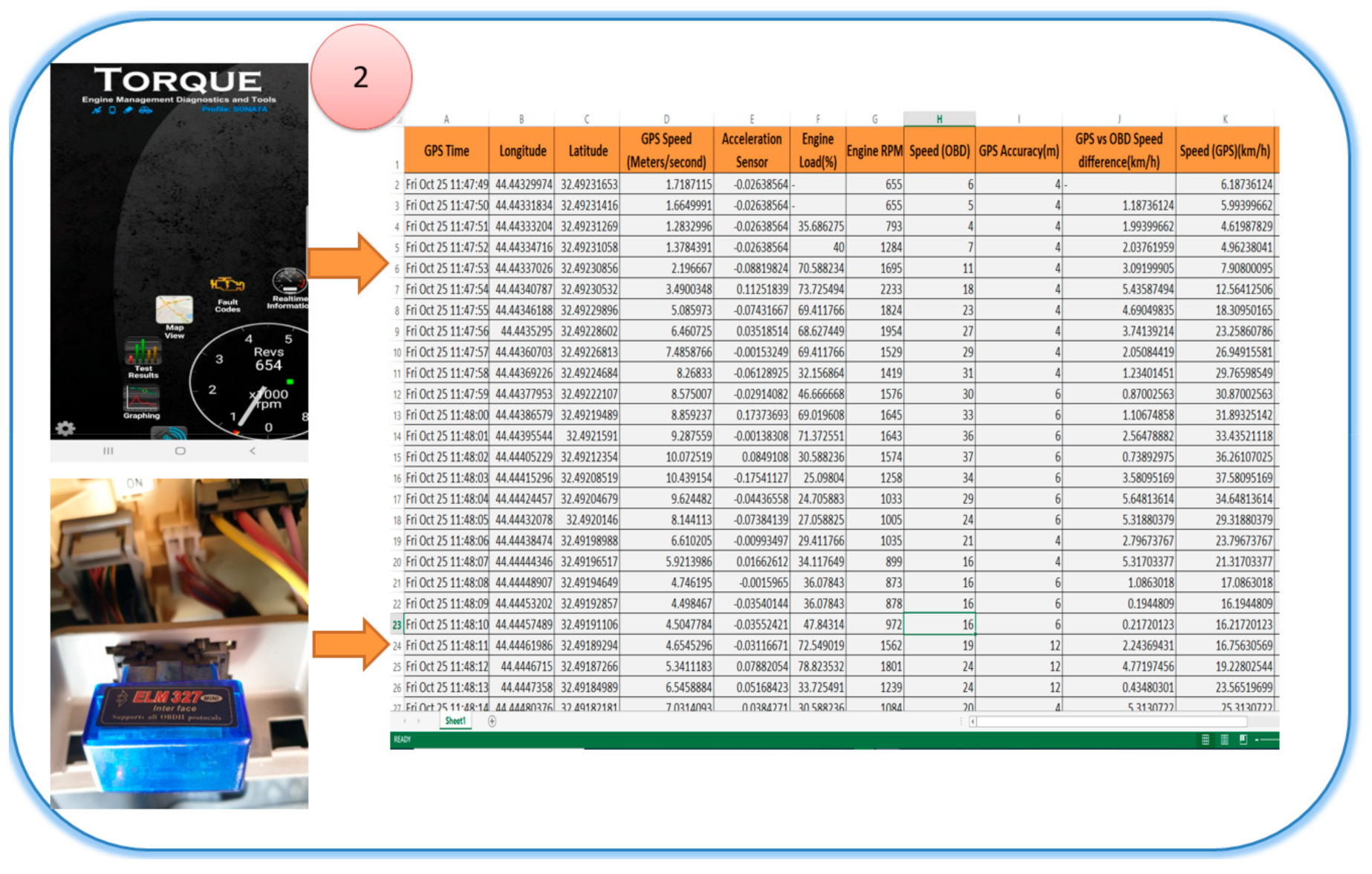
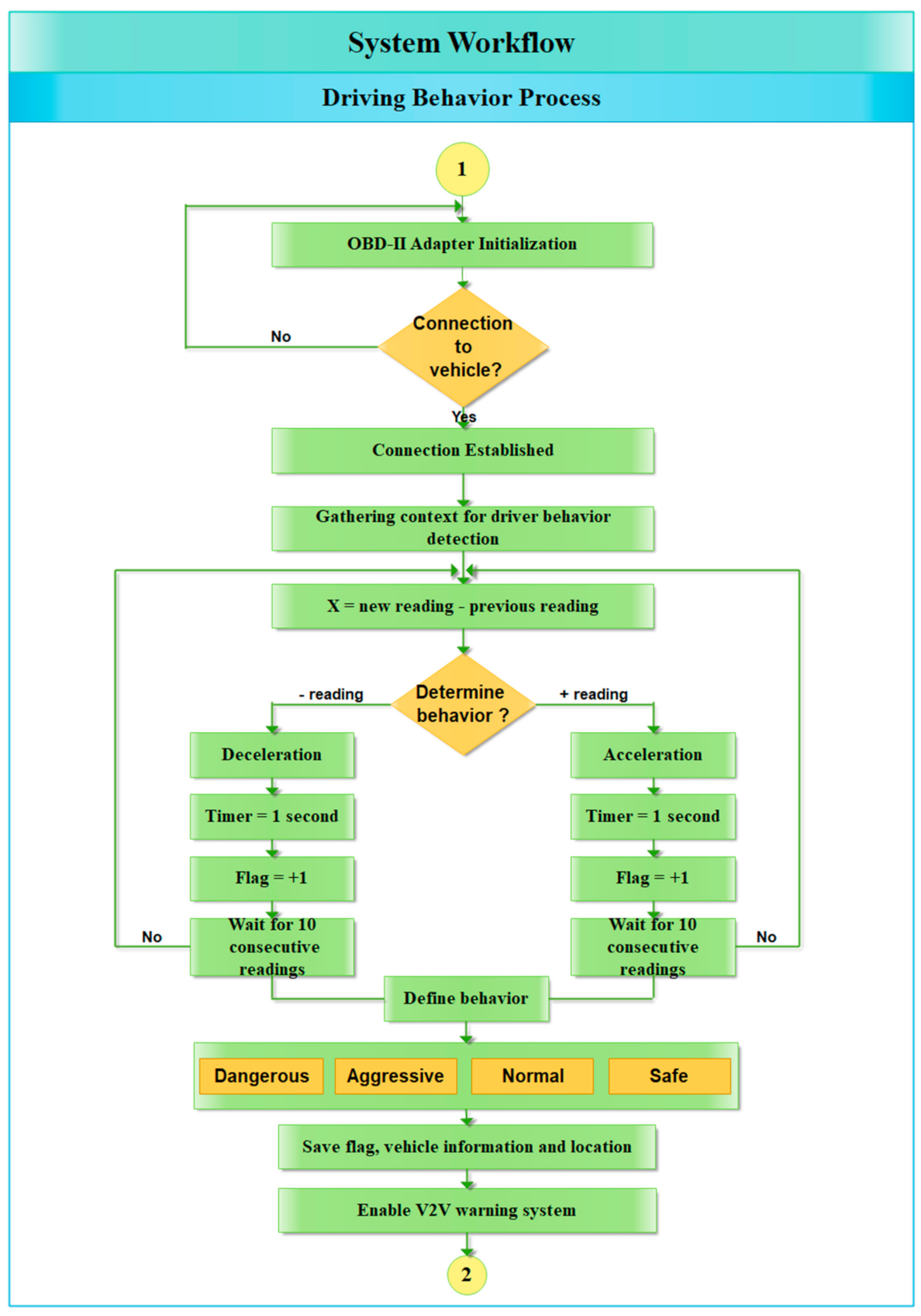
4.2. Algorithmic Procedures of the Driving Behaviors
| Algorithm 2: Define and Calculate Driving Behavior |
| begin |
| for Generic behaviour data do |
| Initialize the OBD-II adapter. |
| end for; |
| if (connection established successfully to the vehicle ECU) then |
| 1. Get current vehicle speed in (km/h). |
| 2. Access to the vehicle run time in (sec). |
| 3. Enable total distance traveled in (km). |
| while access (vehicle speed (km/h) and time in (sec)) do |
| calculate velocity (v) = Δd/Δt → v = / |
| calculate acceleration (a) = Δv/Δt → a = align="left" valign="middle"> / |
| end while; |
| for each (a) data do |
| Δa = → determine whether vehicle in acceleration or deceleration mode |
| current state ← Δa |
| delay (1 s); |
| if (Δa >= 0 m/s2 && Δa <= 2 m/s2) { |
| current state = 0; //safe behaviour |
| } |
| else if (Δa > 2 m/s2 && Δa < = 4 m/s2) { |
| current state = 1; //normal behaviour |
| } |
| else if (Δa > 4 m/s2 && Δa <= 7 m/s2) { |
| current state = 2; //aggressive behaviour |
| } |
| else if (Δa > 7 m/s2) { |
| current state = 3; //dangerous behaviour |
| } |
| Wait for 10 consecutive readings |
| Flag_register [index] = current state; |
| index += 1; |
| if (index == 10) { |
| final flag data= safe or normal or aggressive or dangerous |
| } |
| end if; |
| read data from the GPS in the ‘main loop’; |
| if (GPS.fix) { |
| latitude of the Tx vehicle = GPS.latitudeDegrees; |
| longitude of the Tx vehicle = GPS.longitudeDegrees; |
| } |
| end if; |
| end for; |
| if (final flag data = aggressive) { |
| send vehicle information, vehicle location and type of flag |
| radio.openReadingPipe//enable V2V using nRF24L01+PA/LNA transceiver |
| radio.setPALevel(RF24_PA_MIN); |
| } |
| end if; |
| end if; |
| end; |
5. Study Sites and Research Participants
6. Numerical Results and Discussions
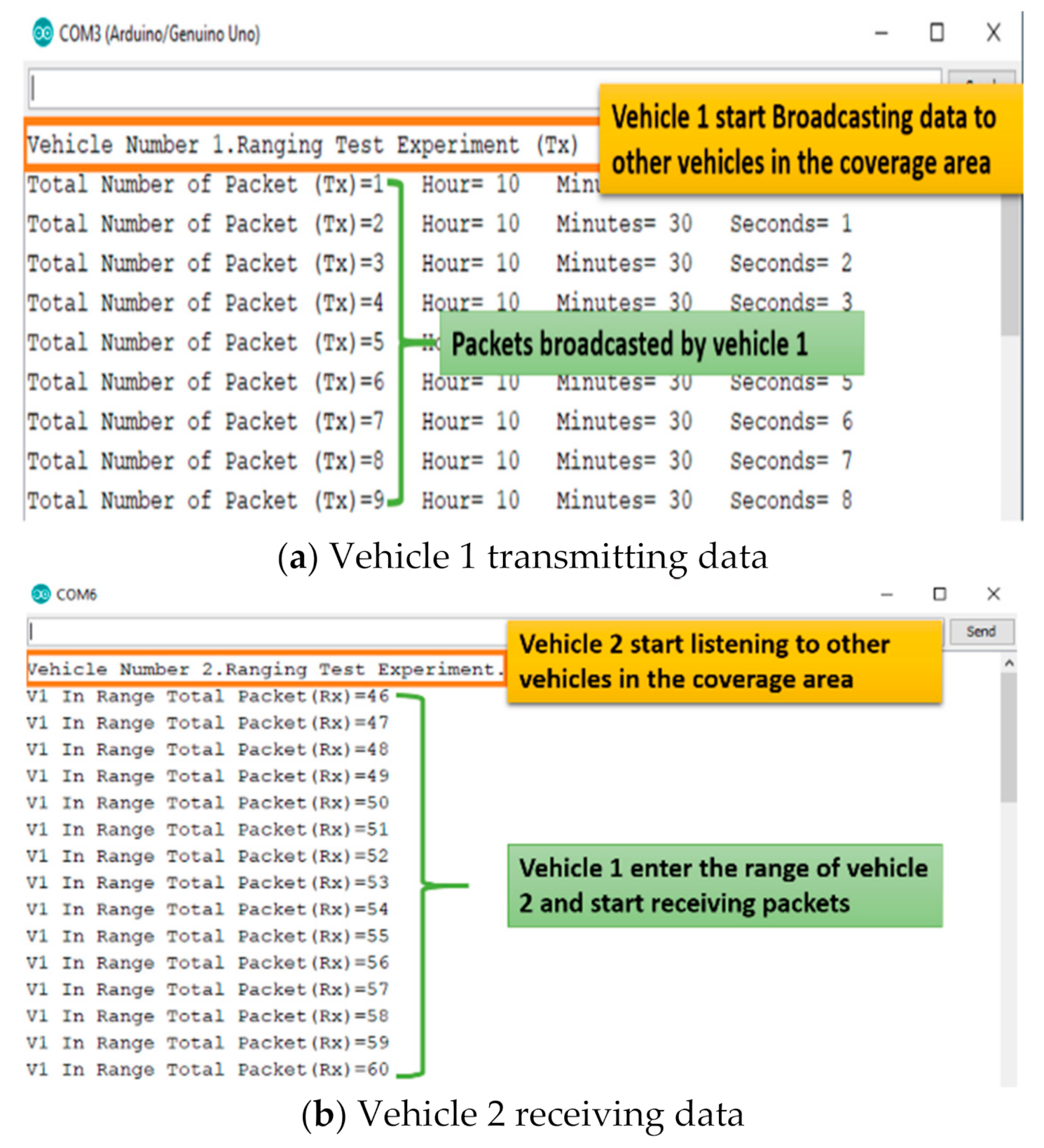
6.1. Packet Delivery Ratio (PDR) of the nRF24L01 + PA/LNA Antenna
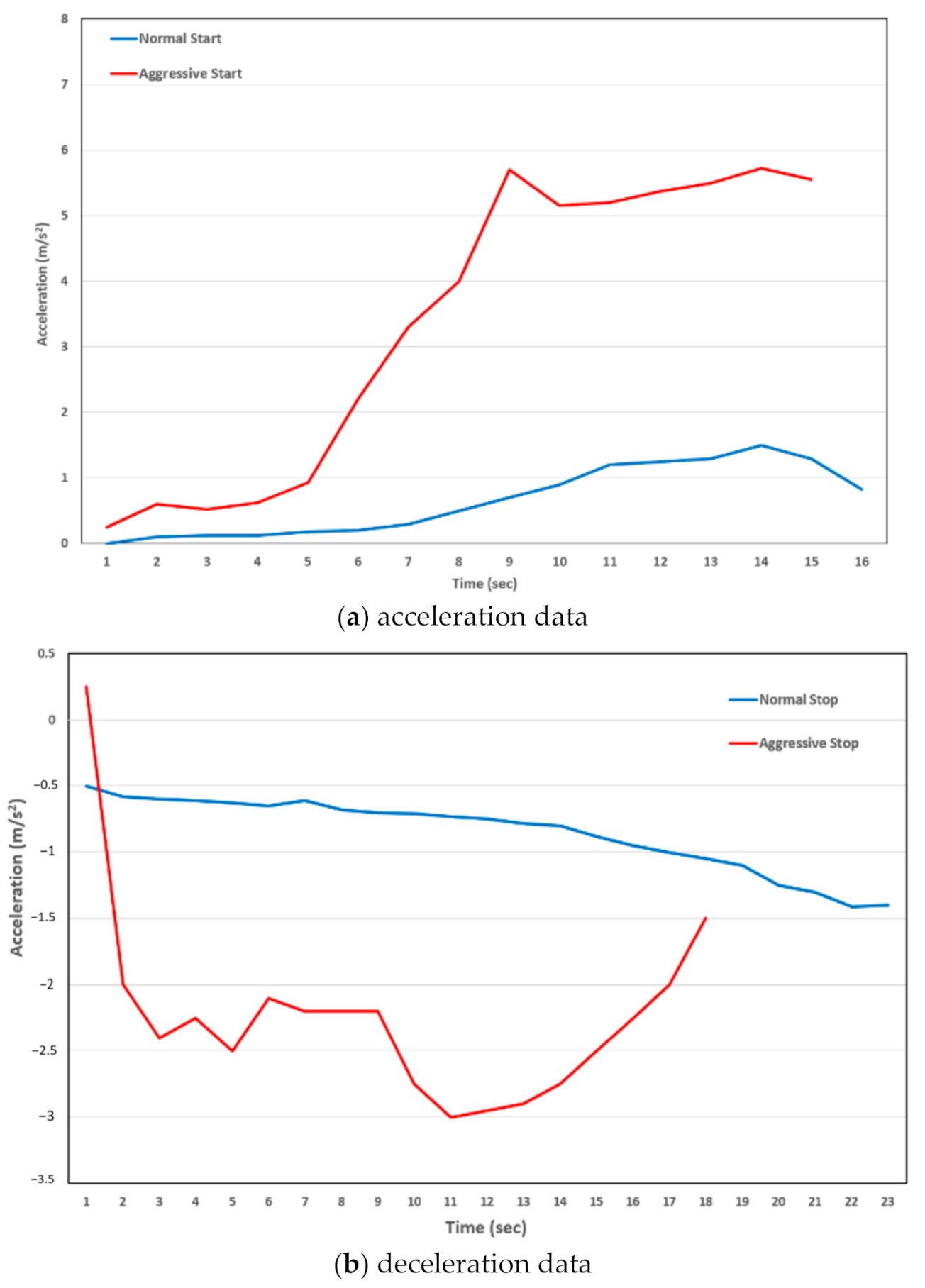
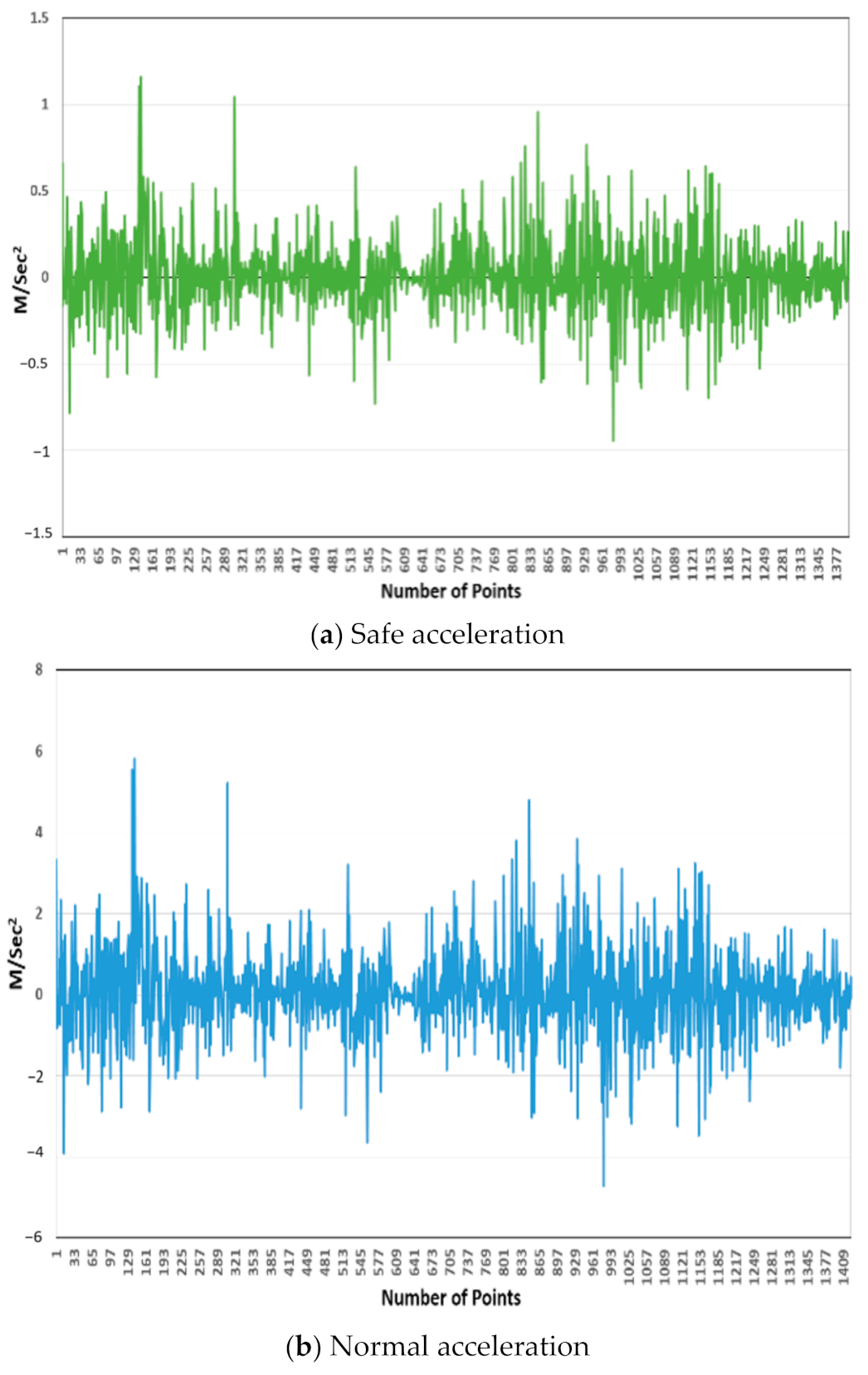
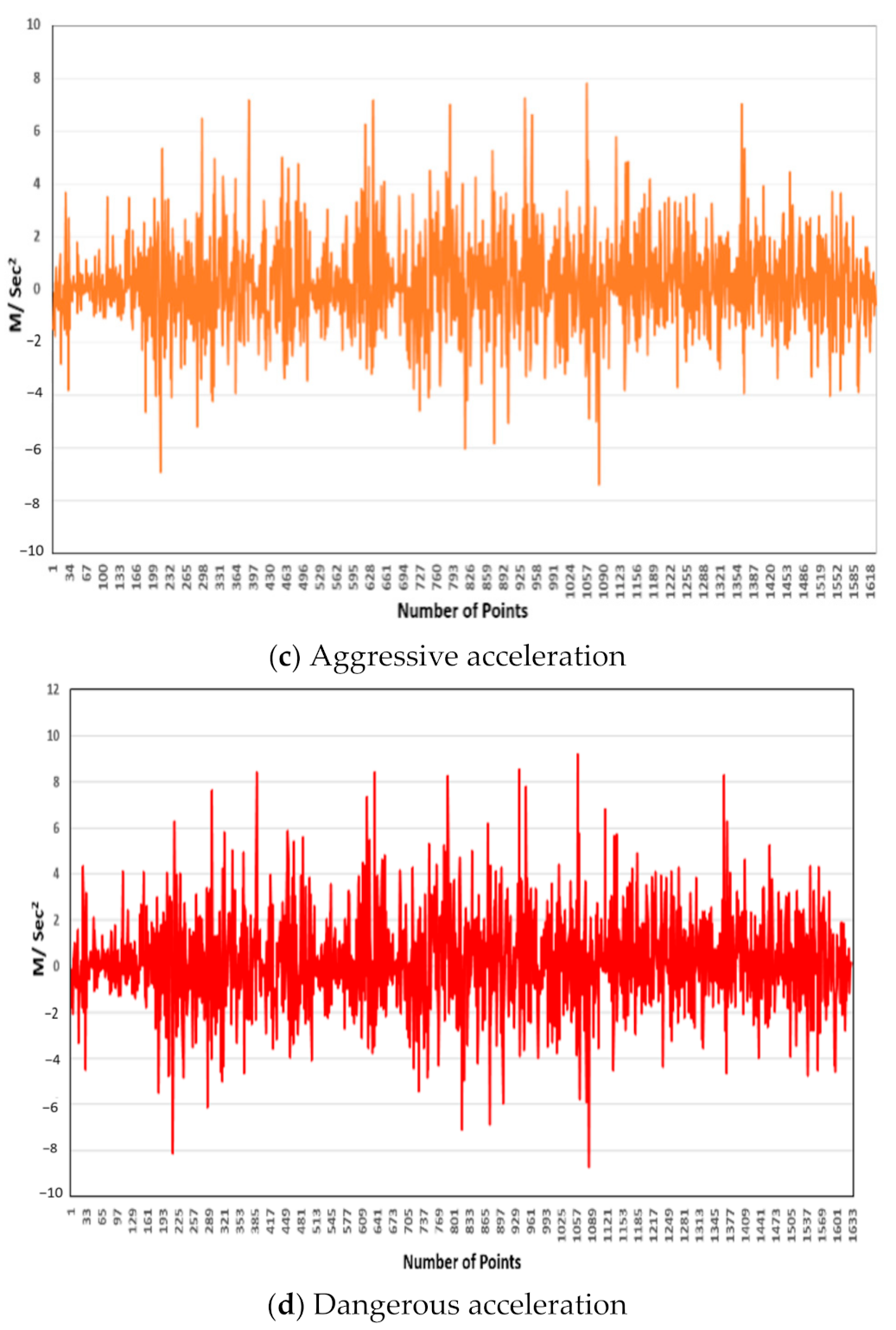
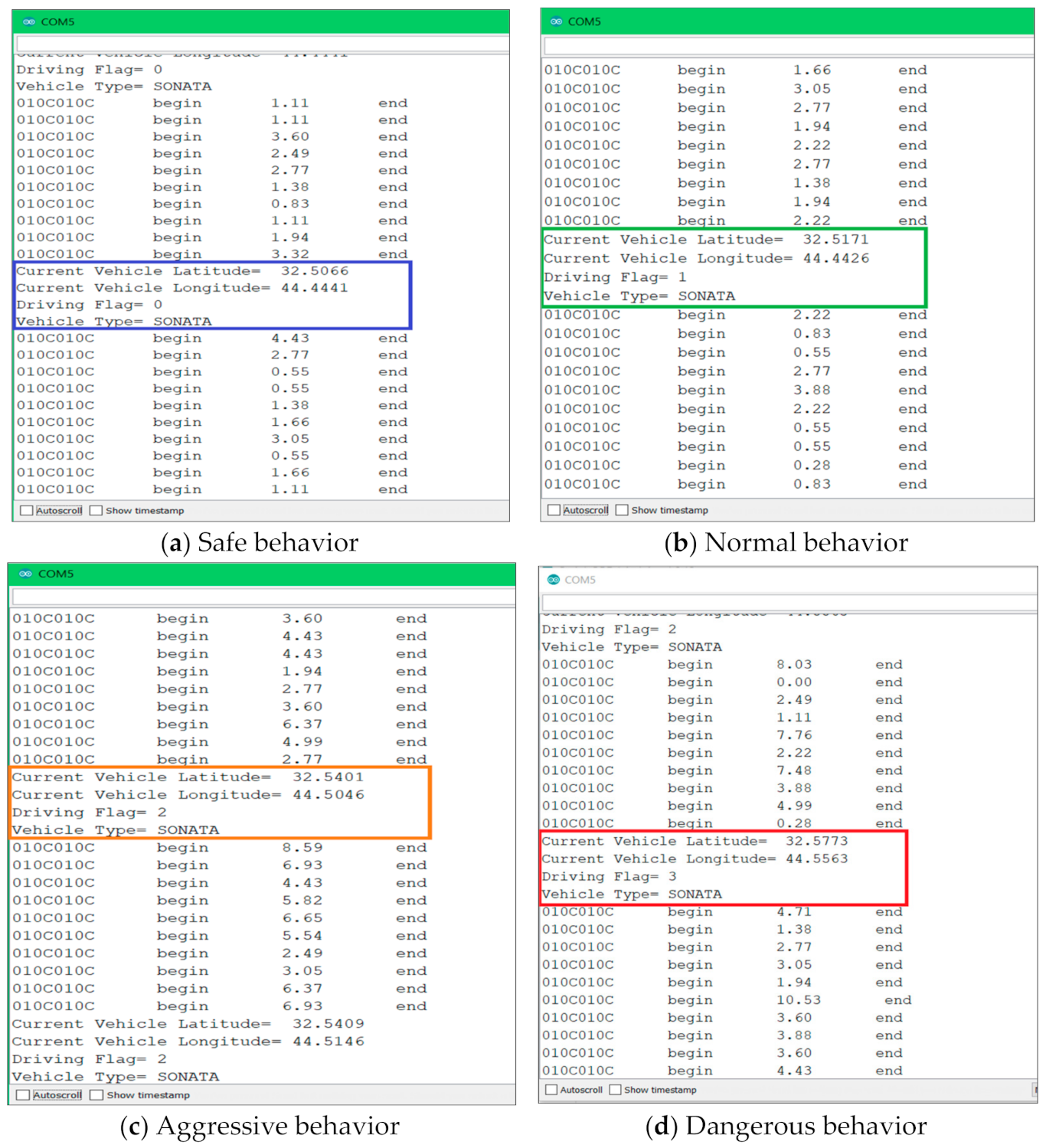
6.2. Driving Behavior Acceleration Data Recognition
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Memon, A.; Shaikh, F.K.; Felemban, E. Experimental evaluation of vehicle-to-vehicle based data transfer. In Proceedings of the 2015 International Conference on Information and Communication Technology Research (ICTRC), Abu Dhabi, United Arab Emirates, 17–19 May 2015; pp. 274–277. [Google Scholar]
- Cardoso, F.; Serrador, A.; Canas, T. Algorithms for Road Safety Based on GPS and Communications Systems WAVE. Procedia Technol. 2014, 17, 640–649. [Google Scholar] [CrossRef] [Green Version]
- Alghamdi, W.; Shakshuki, E.; Sheltami, T.R. Context-Aware Driver Assistance System. Procedia Comput. Sci. 2012, 10, 785–794. [Google Scholar] [CrossRef] [Green Version]
- Liao, C.; Chang, J.; Lee, I.; Venkatasubramanian, K.K. A trust model for vehicular network-based incident reports. In Proceedings of the 2013 IEEE 5th International Symposium on Wireless Vehicular Communications (WiVeC), Dresden, Germany, 2–3 June 2013; pp. 1–5. [Google Scholar]
- Farooq, D.; Moslem, S.; Tufail, R.F.; Ghorbanzadeh, O.; Duleba, S.; Maqsoom, A.; Blaschke, T. Analyzing the Importance of Driver Behavior Criteria Related to Road Safety for Different Driving Cultures. Int. J. Environ. Res. Public Health 2020, 17, 1893. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zinchenko, T. Reliability Assessment of Vehicle-to-Vehicle Communication. Ph.D. Thesis, Technical University of Braunschweig, Braunschweig, Germany, 2015. [Google Scholar]
- Ma, Y.; Zhang, Z.; Chen, S.; Yu, Y.; Tang, K. A Comparative Study of Aggressive Driving Behavior Recognition Algorithms Based on Vehicle Motion Data. IEEE Access 2018, 7, 8028–8038. [Google Scholar] [CrossRef]
- Zardosht, B.; Beauchemin, S.S.; Bauer, M.A. A predictive accident-duration based decision-making module for rerouting in environments with V2V communication. J. Traffic Transp. Eng. (Engl. Ed.) 2017, 4, 535–544. [Google Scholar] [CrossRef]
- Jiménez, F.; Naranjo, J.E.; Anaya, J.J.; García, F.; Ponz, A.; Armingol, J.M. Advanced Driver Assistance System for Road Environments to Improve Safety and Efficiency. Transp. Res. Procedia 2016, 14, 2245–2254. [Google Scholar] [CrossRef] [Green Version]
- Milanes, V.; Alonso, L.; Villagra, J.; Godoy, J.; De Pedro, T.; Oria, J.P. Traffic jam driving with NMV avoidance. Mech. Syst. Signal. Process. 2012, 31, 332–344. [Google Scholar] [CrossRef] [Green Version]
- Motamedidehkordi, N.; Margreiter, M.; Benz, T. Shockwave Suppression by Vehicle-to-Vehicle Communication. Transp. Res. Procedia 2016, 15, 471–482. [Google Scholar] [CrossRef] [Green Version]
- Dorn, L. Driver Behaviour and Training; Routledge: London, UK, 2017. [Google Scholar]
- Jasinski, M.G.; Baldo, F. A Method to Identify Aggressive Driver Behaviour Based on Enriched GPS Data Analysis. In Proceedings of the GEO Processing 2017: The Ninth International Conference on Advanced Geographic Information Systems, Applications, and Services, Nice, France, 19–23 March 2017. [Google Scholar]
- Ogle, J.H. Quantitative Assessment of Driver Speeding Behavior Using Instrumented Vehicles. Ph.D. Thesis, Civil Engineering, Georgia Institute of Technology, Georgia, GA, USA, 2005. [Google Scholar]
- Ellison, A.B.; Greaves, S.P.; Bliemer, M.C. Driver behaviour profiles for road safety analysis. Accid. Anal. Prev. 2015, 76, 118–132. [Google Scholar] [CrossRef]
- Mantouka, E.G.; Barmpounakis, E.N.; Vlahogianni, E.I. Identifying driving safety profiles from smartphone data using unsupervised learning. Saf. Sci. 2019, 119, 84–90. [Google Scholar] [CrossRef]
- Bagdadi, O.; Várhelyi, A. Jerky driving—An indicator of accident proneness? Accid. Anal. Prev. 2011, 43, 1359–1363. [Google Scholar] [CrossRef]
- Carboni, E.M.; Bogorny, V. Inferring Drivers Behavior through Trajectory Analysis; Springer International Publishing: Cham, Switzerland, 2015; pp. 837–848. [Google Scholar]
- Raz, O.; Fleishman, H.; Mulchadsky, I. System and Method for Vehicle Driver Behavior Analysis and Evaluation. U.S. Patent No. 7,389,178, 17 June 2008. [Google Scholar]
- Tango, F.; Botta, M. Real-Time Detection System of Driver Distraction Using Machine Learning. IEEE Trans. Intell. Transp. Syst. 2013, 14, 894–905. [Google Scholar] [CrossRef] [Green Version]
- Aksjonov, A.; Nedoma, P.; Vodovozov, V.; Petlenkov, E.; Herrmann, M. A Novel Driver Performance Model Based on Machine Learning. IFAC-PapersOnLine 2018, 51, 267–272. [Google Scholar] [CrossRef]
- Agarwal, Y.; Jain, K.; Karabasoglu, O. Smart vehicle monitoring and assistance using cloud computing in vehicular Ad Hoc networks. Int. J. Transp. Sci. Technol. 2018, 7, 60–73. [Google Scholar] [CrossRef]
- Eckelmann, S.; Trautmann, T.; Ußler, H.; Reichelt, B.; Michler, O. V2V-Communication, LiDAR System and Positioning Sensors for Future Fusion Algorithms in Connected Vehicles. Transp. Res. Procedia 2017, 27, 69–76. [Google Scholar] [CrossRef]
- Meseguer, J.E.; Calafate, C.T.; Cano, J.C.; Manzoni, P. DrivingStyles: A smartphone application to assess driver behavior. In Proceedings of the 2013 IEEE Symposium on Computers and Communications (ISCC), Split, Croatia, 7–10 July 2013; pp. 535–540. [Google Scholar]
- Lee, S.H.; Lee, S.; Kim, M.H. Development of a Driving Behavior-Based Collision Warning System Using a Neural Network. Int. J. Automot. Technol. 2018, 19, 837–844. [Google Scholar] [CrossRef]
- Tang, A.; Yip, A. Collision avoidance timing analysis of DSRC-based vehicles. Accid. Anal. Prev. 2010, 42, 182–195. [Google Scholar] [CrossRef] [PubMed]
- Pothirasan, N.; Rajasekaran, M.P. Automatic vehicle to vehicle communication and vehicle to infrastructure communication using NRF24L01 module. In Proceedings of the 2016 International Conference on Control, Instrumentation, Communication and Computational Technologies (ICCICCT), Kumaracoil, India, 16–17 December 2016; pp. 400–405. [Google Scholar]
- Saha, H.; Mandal, S.; Mitra, S.; Banerjee, S.; Saha, U. Comparative Performance Analysis between nRF24L01+ and XBEE ZB Module Based Wireless Ad-hoc Networks. Int. J. Comput. Netw. Inf. Secur. 2017, 9, 36–44. [Google Scholar] [CrossRef] [Green Version]
- Ameen, H.A.; Zaidan, R.A.; Mohammed, A.; Mahamad, A.K.; Zaidan, B.B.; Zaidan, A.A.; Saon, S.; Nor, D.M.; Malik, R.Q.; Kareem, Z.H.; et al. A Deep Review and Analysis of Data Exchange in Vehicle-to-Vehicle Communications Systems: Coherent Taxonomy, Challenges, Motivations, Recommendations, Substantial Analysis and Future Directions. IEEE Access 2019, 7, 158349–158378. [Google Scholar] [CrossRef]
- Chen, S.-H.; Pan, J.-S.; Lu, K. Driving behavior analysis based on vehicle OBD information and adaboost algorithms. In Proceedings of the International Multiconference of Engineers and Computer Scientists, Hong Kong, China, 18–20 March 2015; Volume 1, pp. 18–20. [Google Scholar]
- Sassi, A.; Elhillali, Y.; Charfi, F. Evaluating Experimental Measurements of the IEEE 802.11p Communication Using ARADA LocoMate OBU Device Compared to the Theoretical Simulation Results. Wirel. Pers. Commun. 2017, 97, 3861–3874. [Google Scholar] [CrossRef]
- Ahrems, J. Appraisal of Feasibility of Using Vehicle-to-Vehicle Communications for Safe Passage of Unsignalled Road Intersection under Varying Conditions. IFAC Proc. Vol. 2013, 46, 84–89. [Google Scholar] [CrossRef]
- Zaldivar, J.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Providing accident detection in vehicular networks through OBD-II devices and Android-based smartphones. In Proceedings of the 2011 IEEE 36th Conference on Local Computer Networks, Bonn, Germany, 4–7 October 2011; pp. 813–819. [Google Scholar]
- Freematics. Freematics ESP32 OBD Kit. 2017. Available online: https://freematics.com/store/index.php?route=product/product&product_id=87 (accessed on 20 October 2020).
- Klauer, S.G.; Dingus, T.A.; Neale, V.L.; Sudweeks, J.D.; Ramsey, D.J. The Impact of Driver Inattention on Near-Crash/Crash Risk: An Analysis Using the 100-Car Naturalistic Driving Study Data; National Highway Traffic Safety Administration: Washington, DC, USA, 2006. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Brief Description | Used Criteria | Technique | Dataset Used |
|---|---|---|---|---|
| [31] | This study tested the transmission range effects on V2V communications on different roads, urban and rural roads using two vehicles employed moving in opposite directions. | Connectivity and distance | V2V data | Hardware |
| [22] | This study proposed an intelligent traffic monitoring system based on cloud computing, mobile apps, and roadside unit (RSU). | RSU-to-RSU delay and speed | V2I data | Hardware |
| [32] | This study proposed an approach for safe passage of an un-signaled intersection using V2V (static and moving vehicle) in the area with low development density and multi-story buildings with extreme development density area | Connectivity | V2V data | Hardware |
| [27] | This study presented a new approach for intelligent transportation systems (ITS) to manage traffic flow modeled as to nearby “stop and move”, based on an ultrasonic sensor for distance measurement using the nRF24L01 module wireless data, vehicle-controlled by the mobile application and connecting to the Bluetooth (HC-05). | Connectivity and distance | V2V data | Hardware |
| [33] | This study combined vehicles with smartphones through wireless OBD-II interfaces to monitor the vehicle and trigger automated warning using Android application, OBD-II, and 3G communication. The propose is to estimates the G force experienced by the passengers in case of a frontal collision used with airbag triggers to detect accidents and send details through e-mail or SMS. | Data collection and analysis | Driving behavior data | Hardware |
| [25] | This research suggests a collision warning system (CWS) based on an individual’s driving behavior, which uses an artificial neural network learning algorithm to calculate the collision probability based on the driver’s driving characteristics. Radar, OBD-II, the VN5610 network interface, and the controller area network (CAN). | Connectivity, distance, data collection, analysis, and warning | V2V and driving behavior data | Simulation in V2V Hardware in driving behavior |
| [30] | Driving behavior analysis system focused on vehicle OBD data to gather vehicle activity data; vehicle speed, engine RPM, throttle location, and measured engine load. Thus, construct a driving behavior classification model to assess if current driving behavior is safe or not. | Data collection and analysis | Driving behavior data | Hardware |
| Type of Driving | Acceleration Data (m/s2) |
|---|---|
| Safe | 0 to 2 |
| Normal | 2 to 4 |
| Aggressive | 4 to 7 |
| Dangerous | More than 7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ameen, H.A.; Mahamad, A.K.; Saon, S.; Malik, R.Q.; Kareem, Z.H.; Bin Ahmadon, M.A.; Yamaguchi, S. Identification of Driving Safety Profiles in Vehicle to Vehicle Communication System Based on Vehicle OBD Information. Information 2021, 12, 194. https://doi.org/10.3390/info12050194
Ameen HA, Mahamad AK, Saon S, Malik RQ, Kareem ZH, Bin Ahmadon MA, Yamaguchi S. Identification of Driving Safety Profiles in Vehicle to Vehicle Communication System Based on Vehicle OBD Information. Information. 2021; 12(5):194. https://doi.org/10.3390/info12050194
Chicago/Turabian StyleAmeen, Hussein Ali, Abd Kadir Mahamad, Sharifah Saon, Rami Qays Malik, Zahraa Hashim Kareem, Mohd Anuaruddin Bin Ahmadon, and Shingo Yamaguchi. 2021. "Identification of Driving Safety Profiles in Vehicle to Vehicle Communication System Based on Vehicle OBD Information" Information 12, no. 5: 194. https://doi.org/10.3390/info12050194
APA StyleAmeen, H. A., Mahamad, A. K., Saon, S., Malik, R. Q., Kareem, Z. H., Bin Ahmadon, M. A., & Yamaguchi, S. (2021). Identification of Driving Safety Profiles in Vehicle to Vehicle Communication System Based on Vehicle OBD Information. Information, 12(5), 194. https://doi.org/10.3390/info12050194