
A Survey on Old and New Approximations to the Function ϕ(x) Involved in LDPC Codes Density Evolution Analysis Using a Gaussian Approximation

 ,
,  , and
, and
Abstract
:1. Introduction
- is not piecewise defined in the definition interval i.e., it is defined through a unique mathematical expression,
- is explicitly invertible,
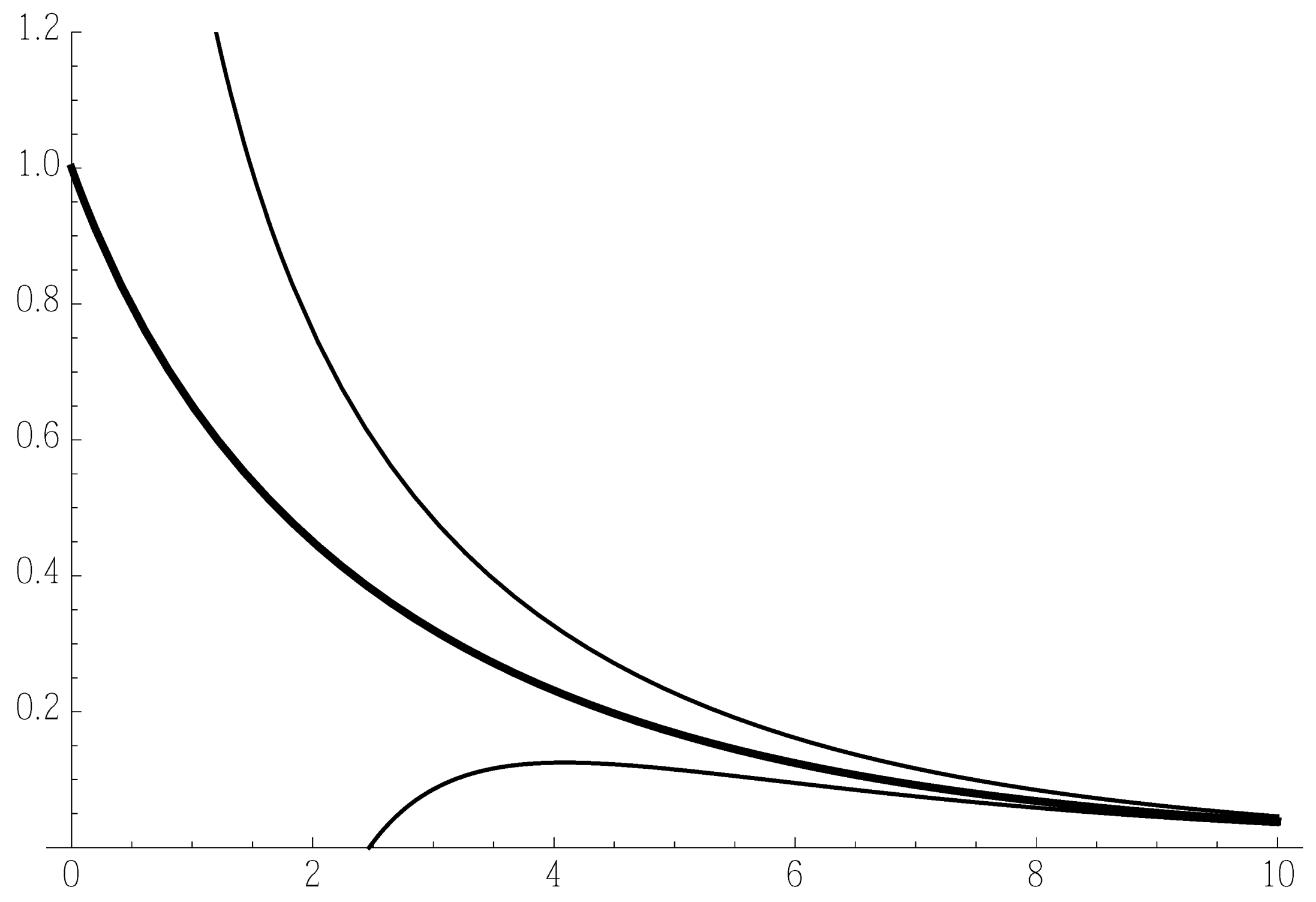
- remains between the two above said tighter bounds of [3] in the domain of interest,
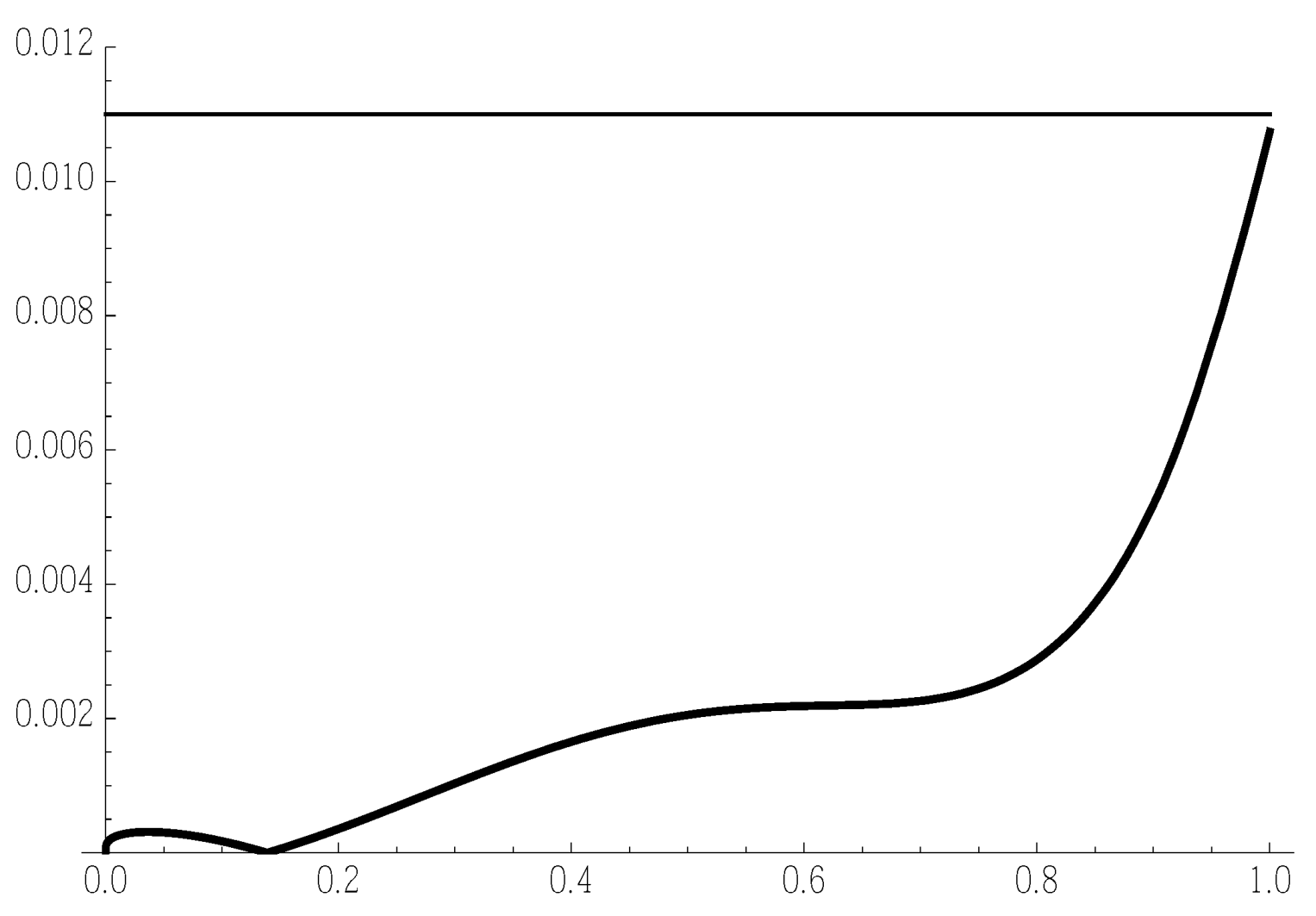
- and has less relative error for any value of x than most of the other approximations, when the error is evaluated by computing numerically through a Mathematica® statement published in [11].
2. Gaussian Approximation for Irregular LDPC Codes
3. Valuable Merits of an Approximation
- to be defined by a single expression, i.e., not piecewise defined;
- its simplicity;
- to be expressed in closed form, without integrals and series and continuous fractions (and limits) by means of:
- -
- elementary functions with standard names used in mathematics;
- -
- the abovementioned elementary functions and the Lambert -function (Notice that the principal branch of the real Lambert -function (which is the inverse of for [10]), at least for , is very classic, with a standard name used in mathematics, has well known and published series expansions, is explicitly invertible by means of elementary functions with standard names used in mathematics, but is not an elementary function;)
- to be appreciable on a wide domain: the better would be , subordinately , then with , and, finally, with ;
- to present a low absolute error (on some domain);
- to present a low relative error in absolute value (on some domain);
- to be explicitly invertible (see Section 6).
- To avoid an infinite relative error, has to present a finite value in , otherwise it diverges in 0.
- To avoid an infinite absolute relative error (defined in (9)), the inverse of the approximation has to be such that exactly, because .
4. Notes on Absolute and Relative Errors
5. The Function : Review of Its Principal Approximations
6. Approximating the Function through an Explicitly Invertible Approximation
6.1. Example of Explicit Invertibility
- substitute or thus obtaining
- substitute or getting
- substitute or thus giving
- expand
- define the constant obtaining
- and rewrite the last, yielding the following:
- Finally, recalling that for (see, e.g., [5]) invert the last obtaining this function (of the variable y)
- and then make the aforementioned substitutions:
- yieldingand
- Thus, the explicit inverse of the starting function can be expressed as
6.2. Explicit Inverse of the Approximation
7. Numeric Results Concerning the Computation of the GA Thresholds and Discussion
8. Conclusions
Funding
Conflicts of Interest
References
- Tanner, R.M. A recursive approach to low complexity codes. IEEE Trans. Inf. Theory 1981, 27, 533–547. [Google Scholar] [CrossRef] [Green Version]
- Chung, S.-Y.; Richardson, T.J.; Urbanke, R. Analysis of sum-product decoding of low-density parity-check codes using a Gaussian approximation. IEEE Trans. Inf. Theory 2001, 47, 657–670. [Google Scholar] [CrossRef] [Green Version]
- Vatta, F.; Soranzo, A.; Babich, F. More accurate analysis of sum-product decoding of LDPC codes using a Gaussian approximation. IEEE Commun. Lett. 2019, 23, 230–233. [Google Scholar] [CrossRef] [Green Version]
- Vatta, F.; Soranzo, A.; Comisso, M.; Buttazzoni, G.; Babich, F. Performance study of a class of irregular LDPC codes through low complexity bounds on their belief-propagation decoding thresholds. In Proceedings of the 2019 AEIT International Annual Conference, AEIT 2019, Florence, Italy, 18–20 September 2019. [Google Scholar]
- Vatta, F.; Soranzo, A.; Babich, F. Low-Complexity bound on irregular LDPC belief-propagation decoding thresholds using a Gaussian approximation. Electron. Lett. 2018, 54, 1038–1040. [Google Scholar] [CrossRef] [Green Version]
- Ha, J.; Kim, J.; McLaughlin, S.W. Rate-compatible puncturing of low-density parity-check codes. IEEE Trans. Inf. Theory 2004, 50, 2824–2836. [Google Scholar] [CrossRef]
- Babich, F.; Noschese, M.; Soranzo, A.; Vatta, F. Low complexity rate compatible puncturing patterns design for LDPC codes. J. Commun. Softw. Syst. (JCOMSS) 2018, 14, 350–358. [Google Scholar] [CrossRef]
- Tan, B.S.; Li, K.H.; Teh, K.C. Bit-error rate analysis of low-density parity- check codes with generalised selection combining over a Rayleigh-fading channel using Gaussian approximation. IET Commun. 2012, 6, 90–96. [Google Scholar] [CrossRef]
- Chen, X.; Lau, F.C.M. Optimization of LDPC codes with deterministic unequal error protection properties. IET Commun. 2011, 5, 1560–1565. [Google Scholar] [CrossRef]
- Vatta, F.; Soranzo, A.; Comisso, M.; Buttazzoni, G.; Babich, F. New explicitly invertible approximation of the function involved in LDPC codes density evolution analysis using a Gaussian approximation. Electron. Lett. 2019, 55, 1183–1186. [Google Scholar] [CrossRef]
- Babich, F.; Noschese, M.; Soranzo, A.; Vatta, F. Low complexity rate compatible puncturing patterns design for LDPC codes. In Proceedings of the 2017 International Conference on Software, Telecommunications and Computer Networks, SoftCOM’17, Split, Croatia, 21–23 September 2017. [Google Scholar]
- Richardson, T.J.; Shokrollahi, A.; Urbanke, R. Design of capacity-approaching irregular low-density parity-check codes. IEEE Trans. Inf. Theory 2001, 47, 619–637. [Google Scholar] [CrossRef] [Green Version]
- Vatta, F.; Babich, F.; Ellero, F.; Noschese, M.; Buttazzoni, G.; Comisso, M. Role of the product λ′(0)ρ′(1) in determining LDPC code performance. Electronics 2019, 8, 1515. [Google Scholar] [CrossRef] [Green Version]
- Vatta, F.; Babich, F.; Ellero, F.; Noschese, M.; Buttazzoni, G.; Comisso, M. Performance study of a class of irregular LDPC codes based on their weight distribution analysis. In Proceedings of the 2019 International Conference on Software, Telecommunications and Computer Networks, SoftCOM’19, Split, Croatia, 19–21 September 2019. [Google Scholar]
- Babich, F.; Soranzo, A.; Vatta, F. Useful mathematical tools for capacity approaching codes design. IEEE Commun. Lett. 2017, 21, 1949–1952. [Google Scholar] [CrossRef]
- Hale, J.; Koçak, H. Dynamics and Bifurcations; Springer: Berlin, Germany, 1991. [Google Scholar]
- Olabiyi, O.; Annamalai, A. Invertible exponential-type approximations for the Gaussian probability integral Q(x) with applications. IEEE Wirel. Commun. Lett. 2012, 1, 544–547. [Google Scholar] [CrossRef]
- Borjesson, P.O.; Sundberg, C.-E.W. Simple approximations of the error function Q(x) for communications applications. IEEE Trans. Commun. 1979, 27, 639–643. [Google Scholar] [CrossRef]
- Chiani, M.; Dardari, D.; Simon, M.K. New exponential bounds and approximations for the computation of error probability in fading channels. IEEE Trans. Wirel. Commun. 2003, 2, 840–845. [Google Scholar] [CrossRef] [Green Version]
- Shi, Q.; Karasawa, Y. An accurate and efficient approximation to the Gaussian Q-function and its applications in performance analysis in Nakagami-m fading. IEEE Commun. Lett. 2011, 15, 479–481. [Google Scholar]
- Benitez, M.; Casadevall, F. Versatile, accurate, and analytically tractable approximation for the Gaussian Q-function. IEEE Trans. Commun. 2011, 59, 917–922. [Google Scholar] [CrossRef] [Green Version]
- Soranzo, A.; Vatta, F.; Comisso, M.; Buttazzoni, G.; Babich, F. New very simply explicitly invertible approximation of the Gaussian Q-function. In Proceedings of the 2019 International Conference on Software, Telecommunications and Computer Networks, SoftCOM’19, Split, Croatia, 19–21 September 2019. [Google Scholar]
- Luby, M.G.; Mitzenmacher, M.; Shokrollahi, M.A.; Spielman, D.A. Improved low-density parity-check codes using irregular graphs. IEEE Trans. Inf. Theory 2001, 47, 585–598. [Google Scholar] [CrossRef] [Green Version]
- Richardson, T.J.; Urbanke, R. The capacity of low-density parity-check codes under message-passing decoding. IEEE Trans. Inf. Theory 2001, 47, 599–618. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Eq. | First Author (Year) [Ref.] | Parts | Domain | for the Inverse | |
|---|---|---|---|---|---|
| (13a) | Chung (2001) [2] | 1 | |||
| (14a) | Vatta (2019) [3] | 1 | |||
| (15a) | Ha (2004) [6] | 1 | |||
| (13b) | Chung (2001) [2] | 1 | |||
| (14b) | Vatta (2019) [3] | 1 | |||
| (13) | Chung (2001) [2] | 2 | |||
| (14) | Vatta (2019) [3] | 2 | |||
| (15) | Ha (2004) [6] | 3 | |||
| (16) | Vatta (2019) | 1 | 0.14% | 1.1% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vatta, F.; Soranzo, A.; Comisso, M.; Buttazzoni, G.; Babich, F. A Survey on Old and New Approximations to the Function ϕ(x) Involved in LDPC Codes Density Evolution Analysis Using a Gaussian Approximation. Information 2021, 12, 212. https://doi.org/10.3390/info12050212
Vatta F, Soranzo A, Comisso M, Buttazzoni G, Babich F. A Survey on Old and New Approximations to the Function ϕ(x) Involved in LDPC Codes Density Evolution Analysis Using a Gaussian Approximation. Information. 2021; 12(5):212. https://doi.org/10.3390/info12050212
Chicago/Turabian StyleVatta, Francesca, Alessandro Soranzo, Massimiliano Comisso, Giulia Buttazzoni, and Fulvio Babich. 2021. "A Survey on Old and New Approximations to the Function ϕ(x) Involved in LDPC Codes Density Evolution Analysis Using a Gaussian Approximation" Information 12, no. 5: 212. https://doi.org/10.3390/info12050212
APA StyleVatta, F., Soranzo, A., Comisso, M., Buttazzoni, G., & Babich, F. (2021). A Survey on Old and New Approximations to the Function ϕ(x) Involved in LDPC Codes Density Evolution Analysis Using a Gaussian Approximation. Information, 12(5), 212. https://doi.org/10.3390/info12050212