

Leveraging Satisfiability Modulo Theory Solvers for Verification of Neural Networks in Predictive Maintenance Applications


Abstract
:1. Introduction
2. Preliminaries
2.1. Neural Networks
2.1.1. Fully Connected Layers
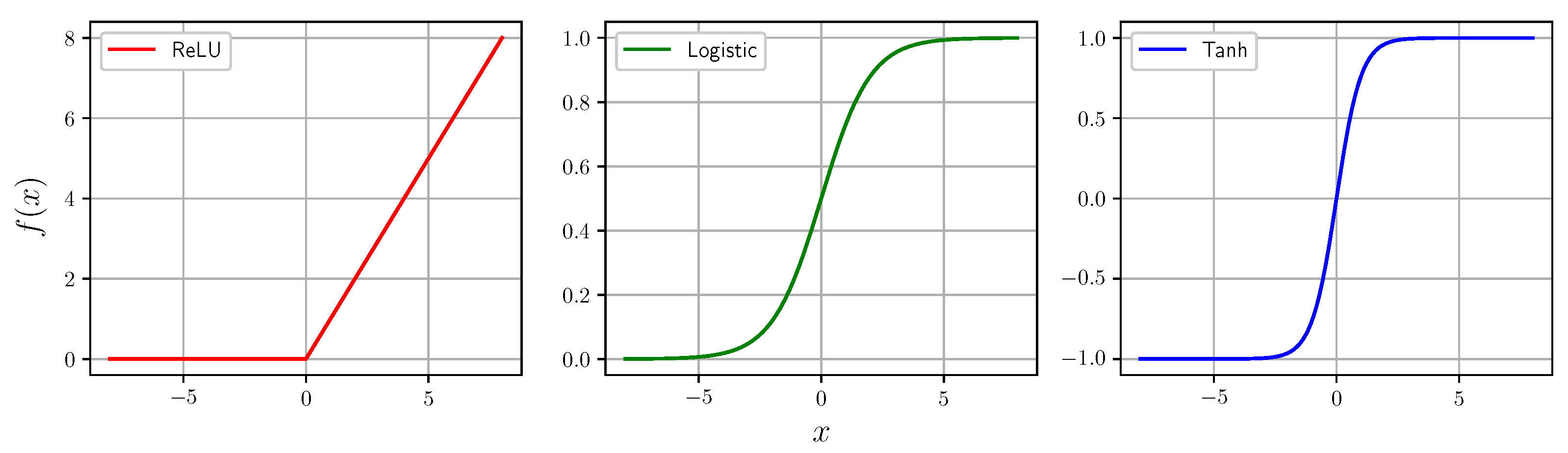
2.1.2. Activation Layers

2.2. Satisfiability Modulo Theory
2.3. Verification
3. Materials and Methods
| Listing 1. SMT-LIB code for the definition of the activation functions of interest. |
| ;; --- RELU DEFINITION --- (define-fun max ((x Real) (y Real)) Real (ite (< x y) y x)) ;; --- LOGI DEFINITION --- (define-fun sigmoid ((x Real)) Real (/ 1 (+ (exp (− x)) 1))) ;; --- TANH DEFINITION --- (define-fun tanh ((x Real)) Real (/ (− (exp x) (exp (− x))) (+ (exp x) (exp (− x))))) |
| Listing 2. SMT-LIB code for the declaration of the classifier input and output variables. |
| ;; --- INPUT VARIABLES --- (declare-fun X_0 () Real) (declare-fun X_1 () Real) … (declare-fun X_8 () Real) ;; --- OUTPUT VARIABLES --- (declare-fun Y_0 () Real) (declare-fun Y_1 () Real) (declare-fun Y_2 () Real) |
| Listing 3. SMT-LIB code for the definition of the precondition on the input and post-condition on the output. |
| ;; --- INPUT CONSTRAINTS --- (assert (>= X_0 0.01)) (assert (<= X_0 0.21)) … (assert (<= X_8 0.1)) ;; --- OUTPUT CONSTRAINTS --- (assert (or (<= Y_0 0.10) (>= Y_0 0.30) … (<= Y_2 0.40) (>= Y_2 0.70))) |
4. Experimental Evaluation
4.1. Setup
4.1.1. Dataset
- u_d: Voltage d-component measurement in dq-coordinates, expressed in volts (V);
- u_q: Voltage q-component measurement in dq-coordinates (V);
- i_d: Current d-component measurement in dq-coordinates, expressed in amperes (A);
- i_q: Current q-component measurement in dq-coordinates (A);
- coolant: Coolant temperature, expressed in Celsius (°C);
- ambient: Ambient temperature (°C);
- motor_speed: Motor speed, expressed in rotations per minute (rpms);
- pm: Permanent magnet temperature (°C), measured with thermocouples;
- stator_winding: Stator winding temperature (°C), measured with thermocouples;
- stator_tooth: Stator tooth temperature (°C), measured with thermocouples;
- stator_yoke: Stator yoke temperature (°C), measured with thermocouples;
- torque: Motor torque, expressed in Newton-meter.
4.1.2. Network Architectures
4.1.3. Training Parameters
4.1.4. Solvers
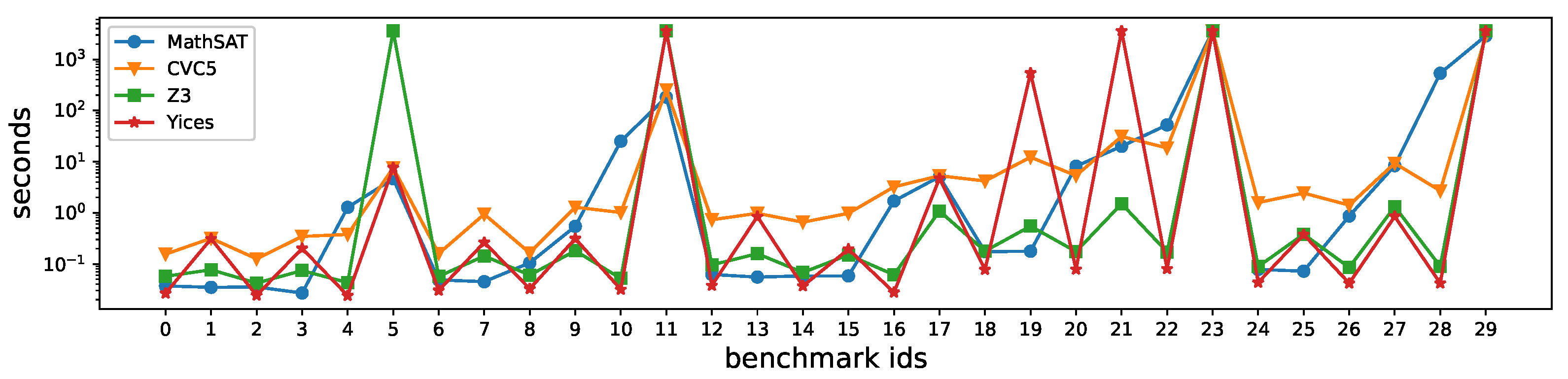
4.2. Results
5. Related Works
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Giunchiglia, E.; Nemchenko, A.; van der Schaar, M. RNN-SURV: A Deep Recurrent Model for Survival Analysis. In Proceedings of the Artificial Neural Networks and Machine Learning—ICANN 2018—27th International Conference on Artificial Neural Networks, Rhodes, Greece, 4–7 October 2018; Springer: Berlin/Heidelberg, Germany, 2018; Volume 11141, pp. 23–32. [Google Scholar]
- Liu, W.; Wang, Z.; Liu, X.; Zeng, N.; Liu, Y.; Alsaadi, F.E. A survey of deep neural network architectures and their applications. Neurocomputing 2017, 234, 11–26. [Google Scholar] [CrossRef]
- Arrieta, A.B.; Rodríguez, N.D.; Ser, J.D.; Bennetot, A.; Tabik, S.; Barbado, A.; García, S.; Gil-Lopez, S.; Molina, D.; Benjamins, R.; et al. Explainable Artificial Intelligence (XAI): Concepts, taxonomies, opportunities and challenges toward responsible AI. Inf. Fusion 2020, 58, 82–115. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Zhu, S. Visual interpretability for deep learning: A survey. Frontiers Inf. Technol. Electron. Eng. 2018, 19, 27–39. [Google Scholar] [CrossRef] [Green Version]
- Samek, W.; Montavon, G.; Lapuschkin, S.; Anders, C.J.; Müller, K. Explaining Deep Neural Networks and Beyond: A Review of Methods and Applications. Proc. IEEE 2021, 109, 247–278. [Google Scholar] [CrossRef]
- Ferrari, C.; Müller, M.N.; Jovanovic, N.; Vechev, M.T. Complete Verification via Multi-Neuron Relaxation Guided Branch-and-Bound. In Proceedings of the Tenth International Conference on Learning Representations, ICLR 2022, Virtual Event, 25–29 April 2022. [Google Scholar]
- Demarchi, S.; Guidotti, D.; Pitto, A.; Tacchella, A. Formal Verification Of Neural Networks: A Case Study About Adaptive Cruise Control. In Proceedings of the 36th ECMS International Conference on Modelling and Simulation, ECMS 2022, Ålesund, Norway, 30 May–3 June 2022; pp. 310–316. [Google Scholar]
- Wang, S.; Zhang, H.; Xu, K.; Lin, X.; Jana, S.; Hsieh, C.; Kolter, J.Z. Beta-CROWN: Efficient Bound Propagation with Per-neuron Split Constraints for Neural Network Robustness Verification. In Proceedings of the Advances in Neural Information Processing Systems 34: Annual Conference on Neural Information Processing Systems 2021, NeurIPS 2021, Virtual, 6–14 December 2021; Curran Associates, Inc.: Red Hook, NY, USA, 2021; pp. 29909–29921. [Google Scholar]
- Guidotti, D. Safety Analysis of Deep Neural Networks. In Proceedings of the Thirtieth International Joint Conference on Artificial Intelligence, IJCAI 2021, Montreal, QC, Canada, 19–27 August 2021; pp. 4887–4888. [Google Scholar]
- Katz, G.; Huang, D.A.; Ibeling, D.; Julian, K.; Lazarus, C.; Lim, R.; Shah, P.; Thakoor, S.; Wu, H.; Zeljic, A.; et al. The Marabou Framework for Verification and Analysis of Deep Neural Networks. In Proceedings of the Computer Aided Verification—31st International Conference, CAV 2019, New York, NY, USA, 15–18 July 2019; Volume 11561, pp. 443–452. [Google Scholar]
- Guidotti, D. Enhancing Neural Networks through Formal Verification. In Proceedings of the Discussion and Doctoral Consortium papers of AI*IA 2019—18th International Conference of the Italian Association for Artificial Intelligence, Rende, Italy, 19–22 November 2019; Volume 2495, pp. 107–112. [Google Scholar]
- Bak, S.; Tran, H.; Hobbs, K.; Johnson, T.T. Improved Geometric Path Enumeration for Verifying ReLU Neural Networks. In Proceedings of the Computer Aided Verification—32nd International Conference, CAV 2020, Los Angeles, CA, USA, 21–24 July 2020; Springer: Berlin/Heidelberg, Germany, 2020; Volume 12224, pp. 66–96. [Google Scholar]
- Kouvaros, P.; Kyono, T.; Leofante, F.; Lomuscio, A.; Margineantu, D.D.; Osipychev, D.; Zheng, Y. Formal Analysis of Neural Network-Based Systems in the Aircraft Domain. In Proceedings of the Formal Methods—24th International Symposium, FM 2021, Virtual Event, 20–26 November 2021; Springer: Berlin/Heidelberg, Germany, 2021; Volume 13047, pp. 730–740. [Google Scholar]
- Singh, G.; Gehr, T.; Püschel, M.; Vechev, M.T. An abstract domain for certifying neural networks. Proc. ACM Program. Lang. 2019, 3, 41:1–41:30. [Google Scholar] [CrossRef] [Green Version]
- Tran, H.; Yang, X.; Lopez, D.M.; Musau, P.; Nguyen, L.V.; Xiang, W.; Bak, S.; Johnson, T.T. NNV: The Neural Network Verification Tool for Deep Neural Networks and Learning-Enabled Cyber-Physical Systems. In Proceedings of the Computer Aided Verification—32nd International Conference, CAV 2020, Los Angeles, CA, USA, 21–24 July 2020; Springer: Berlin/Heidelberg, Germany, 2020; Volume 12224, pp. 3–17. [Google Scholar]
- Guidotti, D.; Pulina, L.; Tacchella, A. pyNeVer: A Framework for Learning and Verification of Neural Networks. In Proceedings of the Automated Technology for Verification and Analysis—19th International Symposium, ATVA 2021, Gold Coast, QLD, Australia, 18–22 October 2021; Springer: Berlin/Heidelberg, Germany, 2021; Volume 12971, pp. 357–363. [Google Scholar]
- Henriksen, P.; Lomuscio, A.R. Efficient Neural Network Verification via Adaptive Refinement and Adversarial Search. In Proceedings of the ECAI 2020—24th European Conference on Artificial Intelligence, Including 10th Conference on Prestigious Applications of Artificial Intelligence (PAIS 2020), Santiago de Compostela, Spain, 29 August–8 September 2020; IOS Press: Amsterdam, The Netherlands, 2020; Volume 325, pp. 2513–2520. [Google Scholar]
- Guidotti, D.; Leofante, F.; Pulina, L.; Tacchella, A. Verification and Repair of Neural Networks: A Progress Report on Convolutional Models. In Proceedings of the AI*IA 2019—Advances in Artificial Intelligence—XVIIIth International Conference of the Italian Association for Artificial Intelligence, Rende, Italy, 19–22 November 2019; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11946, pp. 405–417. [Google Scholar]
- Henriksen, P.; Lomuscio, A. DEEPSPLIT: An Efficient Splitting Method for Neural Network Verification via Indirect Effect Analysis. In Proceedings of the Thirtieth International Joint Conference on Artificial Intelligence, IJCAI 2021, Montreal, QC, Canada, 19–27 August 2021; pp. 2549–2555. [Google Scholar]
- Guidotti, D.; Leofante, F.; Pulina, L.; Tacchella, A. Verification of Neural Networks: Enhancing Scalability Through Pruning. In Proceedings of the ECAI 2020—24th European Conference on Artificial Intelligence, Including 10th Conference on Prestigious Applications of Artificial Intelligence (PAIS 2020), Santiago de Compostela, Spain, 29 August– 8 September 2020; IOS Press: Amsterdam, The Netherlands, 2020; Volume 325, pp. 2505–2512. [Google Scholar]
- Henriksen, P.; Leofante, F.; Lomuscio, A. Repairing misclassifications in neural networks using limited data. In Proceedings of the SAC ’22: The 37th ACM/SIGAPP Symposium on Applied Computing, Virtual Event, 25–29 April 2022; ACM: New York, NY, USA, 2022; pp. 1031–1038. [Google Scholar]
- Guidotti, D. Verification and Repair of Neural Networks. In Proceedings of the Thirty-Fifth AAAI Conference on Artificial Intelligence, AAAI 2021, Thirty-Third Conference on Innovative Applications of Artificial Intelligence, IAAI 2021, The Eleventh Symposium on Educational Advances in Artificial Intelligence, EAAI 2021, Virtual Event, 2–9 February 2021; AAAI Press: Washington, DC, USA, 2021; pp. 15714–15715. [Google Scholar]
- Sotoudeh, M.; Thakur, A.V. Provable repair of deep neural networks. In Proceedings of the PLDI ’21: 42nd ACM SIGPLAN International Conference on Programming Language Design and Implementation, Virtual Event, 20–25 June 2021; ACM: New York, NY, USA, 2021; pp. 588–603. [Google Scholar]
- Goldberger, B.; Katz, G.; Adi, Y.; Keshet, J. Minimal Modifications of Deep Neural Networks using Verification. In Proceedings of the LPAR 2020: 23rd International Conference on Logic for Programming, Artificial Intelligence and Reasoning, Alicante, Spain, 22–27 May 2020; Volume 73, pp. 260–278. [Google Scholar]
- Guidotti, D.; Leofante, F.; Tacchella, A.; Castellini, C. Improving Reliability of Myocontrol Using Formal Verification. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 564–571. [Google Scholar] [CrossRef] [PubMed]
- Guidotti, D.; Leofante, F. Repair of Convolutional Neural Networks using Convex Optimization: Preliminary Experiments. In Proceedings of the Cyber-Physical Systems PhD Workshop 2019, an Event Held within the CPS Summer School “Designing Cyber-Physical Systems—From Concepts to Implementation”, Alghero, Italy, 23 September 2019; Volume 2457, pp. 18–28. [Google Scholar]
- Guidotti, D.; Leofante, F.; Castellini, C.; Tacchella, A. Repairing Learned Controllers with Convex Optimization: A Case Study. In Proceedings of the Integration of Constraint Programming, Artificial Intelligence, and Operations Research—16th International Conference, CPAIOR 2019, Thessaloniki, Greece, 4–7 June 2019; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11494, pp. 364–373. [Google Scholar]
- Szegedy, C.; Zaremba, W.; Sutskever, I.; Bruna, J.; Erhan, D.; Goodfellow, I.J.; Fergus, R. Intriguing properties of neural networks. In Proceedings of the 2nd International Conference on Learning Representations, ICLR 2014, Banff, AB, Canada, 14–16 April 2014. [Google Scholar]
- Psarommatis, F.; May, G.; Azamfirei, V. Envisioning maintenance 5.0: Insights from a systematic literature review of Industry 4.0 and a proposed framework. J. Manuf. Syst. 2023, 68, 376–399. [Google Scholar] [CrossRef]
- Cech, M.; Beltman, A.; Ozols, K. Digital Twins and AI in Smart Motion Control Applications. In Proceedings of the 27th IEEE International Conference on Emerging Technologies and Factory Automation, ETFA 2022, Stuttgart, Germany, 6–9 September 2022; pp. 1–7. [Google Scholar]
- Barrett, C.; Stump, A.; Tinelli, C. The SMT-LIB standard: Version 2.0. In Proceedings of the SMT Workshop 2010, Edinburgh, UK, 14–15 July 2010; Volume 13, p. 14. [Google Scholar]
- de Moura, L.M.; Bjørner, N.S. Satisfiability modulo theories: Introduction and applications. Commun. ACM 2011, 54, 69–77. [Google Scholar] [CrossRef]
- Pulina, L.; Tacchella, A. Challenging SMT solvers to verify neural networks. AI Commun. 2012, 25, 117–135. [Google Scholar] [CrossRef]
- Ehlers, R. Formal Verification of Piece-Wise Linear Feed-Forward Neural Networks. In Proceedings of the Automated Technology for Verification and Analysis—15th International Symposium, ATVA 2017, Pune, India, 3–6 October 2017; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10482, pp. 269–286. [Google Scholar]
- Katz, G.; Barrett, C.W.; Dill, D.L.; Julian, K.; Kochenderfer, M.J. Reluplex: An Efficient SMT Solver for Verifying Deep Neural Networks. In Proceedings of the Computer Aided Verification—29th International Conference, CAV 2017, Heidelberg, Germany, 24–28 July 2017; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10426, pp. 97–117. [Google Scholar]
- Kirchgässner, W.; Wallscheid, O.; Böcker, J. Estimating Electric Motor Temperatures With Deep Residual Machine Learning. IEEE Trans. Power Electron. 2021, 36, 7480–7488. [Google Scholar] [CrossRef]
- Wallscheid, O.; Böcker, J. Global Identification of a Low-Order Lumped-Parameter Thermal Network for Permanent Magnet Synchronous Motors. IEEE Trans. Energy Convers. 2016, 31, 354–365. [Google Scholar] [CrossRef]
- Barbosa, H.; Barrett, C.W.; Brain, M.; Kremer, G.; Lachnitt, H.; Mann, M.; Mohamed, A.; Mohamed, M.; Niemetz, A.; Nötzli, A.; et al. cvc5: A Versatile and Industrial-Strength SMT Solver. In Proceedings of the Tools and Algorithms for the Construction and Analysis of Systems—28th International Conference, TACAS 2022, Held as Part of the European Joint Conferences on Theory and Practice of Software, ETAPS 2022, Munich, Germany, 2–7 April 2022; Springer: Berlin/Heidelberg, Germany, 2022; Volume 13243, pp. 415–442. [Google Scholar]
- Cimatti, A.; Griggio, A.; Schaafsma, B.J.; Sebastiani, R. The MathSAT5 SMT Solver. In Proceedings of the Tools and Algorithms for the Construction and Analysis of Systems—19th International Conference, TACAS 2013, Held as Part of the European Joint Conferences on Theory and Practice of Software, ETAPS 2013, Rome, Italy, 16–24 March 2013; Springer: Berlin/Heidelberg, Germany, 2013; Volume 7795, pp. 93–107. [Google Scholar]
- de Moura, L.M.; Bjørner, N.S. Z3: An Efficient SMT Solver. In Proceedings of the Tools and Algorithms for the Construction and Analysis of Systems, 14th International Conference, TACAS 2008, Held as Part of the Joint European Conferences on Theory and Practice of Software, ETAPS 2008, Budapest, Hungary, 29 March–6 April 2008; Springer: Berlin/Heidelberg, Germany, 2008; Volume 4963, pp. 337–340. [Google Scholar]
- Dutertre, B. Yices 2.2. In Proceedings of the Computer Aided Verification—26th International Conference, CAV 2014, Held as Part of the Vienna Summer of Logic, VSL 2014, Vienna, Austria, 18–22 July 2014; Springer: Berlin/Heidelberg, Germany, 2014; Volume 8559, pp. 737–744. [Google Scholar]
- Huang, X.; Kroening, D.; Ruan, W.; Sharp, J.; Sun, Y.; Thamo, E.; Wu, M.; Yi, X. A survey of safety and trustworthiness of deep neural networks: Verification, testing, adversarial attack and defence, and interpretability. Comput. Sci. Rev. 2020, 37, 100270. [Google Scholar] [CrossRef]
- Leofante, F.; Narodytska, N.; Pulina, L.; Tacchella, A. Automated Verification of Neural Networks: Advances, Challenges and Perspectives. arXiv 2018, arXiv:1805.09938. [Google Scholar]
- Pulina, L.; Tacchella, A. NeVer: A tool for artificial neural networks verification. Ann. Math. Artif. Intell. 2011, 62, 403–425. [Google Scholar] [CrossRef]
- Zhang, H.; Weng, T.; Chen, P.; Hsieh, C.; Daniel, L. Efficient Neural Network Robustness Certification with General Activation Functions. In Proceedings of the Advances in Neural Information Processing Systems 31: Annual Conference on Neural Information Processing Systems 2018, NeurIPS 2018, Montréal, QC, Canada, 3–8 December 2018; pp. 4944–4953. [Google Scholar]
- Bunel, R.; Lu, J.; Turkaslan, I.; Torr, P.H.S.; Kohli, P.; Kumar, M.P. Branch and Bound for Piecewise Linear Neural Network Verification. J. Mach. Learn. Res. 2020, 21, 42:1–42:39. [Google Scholar]
- Palma, A.D.; Bunel, R.; Desmaison, A.; Dvijotham, K.; Kohli, P.; Torr, P.H.S.; Kumar, M.P. Improved Branch and Bound for Neural Network Verification via Lagrangian Decomposition. arXiv 2021, arXiv:2104.06718. [Google Scholar]
- Pulina, L.; Tacchella, A. An Abstraction-Refinement Approach to Verification of Artificial Neural Networks. In Proceedings of the Computer Aided Verification, 22nd International Conference, CAV 2010, Edinburgh, UK, 15–19 July 2010; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6174, pp. 243–257. [Google Scholar]
- Weng, T.; Zhang, H.; Chen, H.; Song, Z.; Hsieh, C.; Daniel, L.; Boning, D.S.; Dhillon, I.S. Towards Fast Computation of Certified Robustness for ReLU Networks. In Proceedings of the 35th International Conference on Machine Learning, ICML 2018, Stockholmsmässan, Stockholm, Sweden, 10–15 July 2018; Volume 80, pp. 5273–5282. [Google Scholar]
- Wong, E.; Kolter, J.Z. Provable Defenses against Adversarial Examples via the Convex Outer Adversarial Polytope. In Proceedings of the 35th International Conference on Machine Learning, ICML 2018, Stockholmsmässan, Stockholm, Sweden, 10–15 July 2018; Volume 80, pp. 5283–5292. [Google Scholar]
- Ruan, W.; Huang, X.; Kwiatkowska, M. Reachability Analysis of Deep Neural Networks with Provable Guarantees. In Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence, IJCAI 2018, Stockholm, Sweden, 13–19 July 2018; pp. 2651–2659. [Google Scholar]
- Ruan, W.; Wu, M.; Sun, Y.; Huang, X.; Kroening, D.; Kwiatkowska, M. Global Robustness Evaluation of Deep Neural Networks with Provable Guarantees for the Hamming Distance. In Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence, IJCAI 2019, Macao, China, 10–16 August 2019; pp. 5944–5952. [Google Scholar]
- Huang, X.; Kwiatkowska, M.; Wang, S.; Wu, M. Safety Verification of Deep Neural Networks. In Proceedings of the Computer Aided Verification—29th International Conference, CAV 2017, Heidelberg, Germany, 24–28 July 2017; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10426, pp. 3–29. [Google Scholar]
- Wu, M.; Wicker, M.; Ruan, W.; Huang, X.; Kwiatkowska, M. A game-based approximate verification of deep neural networks with provable guarantees. Theor. Comput. Sci. 2020, 807, 298–329. [Google Scholar] [CrossRef]
- Wicker, M.; Huang, X.; Kwiatkowska, M. Feature-Guided Black-Box Safety Testing of Deep Neural Networks. In Proceedings of the Tools and Algorithms for the Construction and Analysis of Systems—24th International Conference, TACAS 2018, Held as Part of the European Joint Conferences on Theory and Practice of Software, ETAPS 2018, Thessaloniki, Greece, 14–20 April 2018; Springer: Berlin/Heidelberg, Germany, 2018; Volume 10805, pp. 408–426. [Google Scholar]
- Fränzle, M.; Herde, C. HySAT: An efficient proof engine for bounded model checking of hybrid systems. Form. Methods Syst. Des. 2007, 30, 179–198. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
| Architecture | MSE | Epsilon | Delta | Benchmark ID | ||||
|---|---|---|---|---|---|---|---|---|
| ReLU | Logi | Tanh | ReLU | Logi | Tanh | |||
| [16] | 0.001 | 0.1 | B_000 | B_030 | B_060 | |||
| 1 | B_001 | B_031 | B_061 | |||||
| 0.01 | 0.1 | B_002 | B_032 | B_062 | ||||
| 1 | B_003 | B_033 | B_063 | |||||
| 0.1 | 0.1 | B_004 | B_034 | B_064 | ||||
| 1 | B_005 | B_035 | B_065 | |||||
| [32] | 0.001 | 0.1 | B_006 | B_036 | B_066 | |||
| 1 | B_007 | B_037 | B_067 | |||||
| 0.01 | 0.1 | B_008 | B_038 | B_068 | ||||
| 1 | B_009 | B_039 | B_069 | |||||
| 0.1 | 0.1 | B_010 | B_040 | B_070 | ||||
| 1 | B_011 | B_041 | B_071 | |||||
| [16-8] | 0.001 | 0.1 | B_012 | B_042 | B_072 | |||
| 1 | B_013 | B_043 | B_073 | |||||
| 0.01 | 0.1 | B_014 | B_044 | B_074 | ||||
| 1 | B_015 | B_045 | B_075 | |||||
| 0.1 | 0.1 | B_016 | B_046 | B_076 | ||||
| 1 | B_017 | B_047 | B_077 | |||||
| [32-16] | 0.001 | 0.1 | B_018 | B_048 | B_078 | |||
| 1 | B_019 | B_049 | B_079 | |||||
| 0.01 | 0.1 | B_020 | B_050 | B_080 | ||||
| 1 | B_021 | B_051 | B_081 | |||||
| 0.1 | 0.1 | B_022 | B_052 | B_082 | ||||
| 1 | B_023 | B_053 | B_083 | |||||
| [64] | 0.001 | 0.1 | B_024 | B_054 | B_084 | |||
| 1 | B_025 | B_055 | B_085 | |||||
| 0.01 | 0.1 | B_026 | B_056 | B_086 | ||||
| 1 | B_027 | B_057 | B_087 | |||||
| 0.1 | 0.1 | B_028 | B_058 | B_088 | ||||
| 1 | B_029 | B_059 | B_089 | |||||
| Benchmark ID | Times | Results | ||||||
|---|---|---|---|---|---|---|---|---|
| MathSAT | CVC5 | Z3 | Yices2 | MathSAT | CVC5 | Z3 | Yices2 | |
| B_000 | 0.037 | 0.156 | 0.057 | 0.027 | sat | sat | sat | sat |
| B_001 | 0.035 | 0.317 | 0.077 | 0.310 | unsat | unsat | unsat | unsat |
| B_002 | 0.035 | 0.126 | 0.042 | 0.024 | sat | sat | sat | sat |
| B_003 | 0.027 | 0.346 | 0.074 | 0.201 | unsat | unsat | unsat | unsat |
| B_004 | 1.277 | 0.377 | 0.043 | 0.024 | sat | sat | sat | sat |
| B_005 | 4.629 | 7.589 | - | 7.648 | unsat | unsat | - | unsat |
| B_006 | 0.049 | 0.160 | 0.057 | 0.030 | sat | sat | sat | sat |
| B_007 | 0.045 | 0.939 | 0.143 | 0.264 | unsat | unsat | unsat | unsat |
| B_008 | 0.105 | 0.164 | 0.061 | 0.033 | sat | sat | sat | sat |
| B_009 | 0.545 | 1.286 | 0.181 | 0.313 | unsat | unsat | unsat | unsat |
| B_010 | 25.164 | 1.014 | 0.052 | 0.032 | sat | sat | sat | sat |
| B_011 | 182.658 | 254.133 | - | - | unsat | unsat | - | - |
| B_012 | 0.062 | 0.732 | 0.096 | 0.038 | sat | sat | sat | sat |
| B_013 | 0.055 | 0.977 | 0.159 | 0.844 | unsat | unsat | unsat | unsat |
| B_014 | 0.058 | 0.656 | 0.068 | 0.037 | sat | sat | sat | sat |
| B_015 | 0.058 | 0.978 | 0.151 | 0.194 | unsat | unsat | unsat | unsat |
| B_016 | 1.700 | 3.216 | 0.061 | 0.028 | sat | sat | sat | sat |
| B_017 | 5.084 | 5.307 | 1.084 | 4.705 | unsat | unsat | unsat | unsat |
| B_018 | 0.174 | 4.190 | 0.178 | 0.078 | sat | sat | sat | sat |
| B_019 | 0.177 | 12.235 | 0.549 | 541.365 | unsat | unsat | unsat | unsat |
| B_020 | 8.151 | 5.342 | 0.175 | 0.078 | sat | sat | sat | sat |
| B_021 | 19.972 | 31.095 | 1.506 | - | unsat | unsat | unsat | - |
| B_022 | 52.468 | 18.573 | 0.171 | 0.080 | sat | sat | sat | sat |
| B_023 | - | - | - | - | - | - | - | - |
| B_024 | 0.078 | 1.585 | 0.089 | 0.043 | sat | sat | sat | sat |
| B_025 | 0.072 | 2.431 | 0.381 | 0.376 | unsat | unsat | unsat | unsat |
| B_026 | 0.865 | 1.412 | 0.086 | 0.042 | sat | sat | sat | sat |
| B_027 | 8.368 | 9.306 | 1.319 | 0.850 | unsat | unsat | unsat | unsat |
| B_028 | 535.558 | 2.700 | 0.090 | 0.042 | sat | sat | sat | sat |
| B_029 | 2890.789 | 2922.805 | - | - | unsat | unsat | - | - |
| B_031 | 2.351 | - | N.S. | N.S. | unsat | - | N.S. | N.S. |
| B_033 | 1.948 | - | N.S. | N.S. | unsat | - | N.S. | N.S. |
| B_035 | 6.128 | - | N.S. | N.S. | unsat | - | N.S. | N.S. |
| B_037 | 1474.801 | - | N.S. | N.S. | unsat | - | N.S. | N.S. |
| B_043 | 209.425 | - | N.S. | N.S. | unsat | - | N.S. | N.S. |
| B_045 | 53.913 | - | N.S. | N.S. | unsat | - | N.S. | N.S. |
| B_047 | 796.081 | - | N.S. | N.S. | unsat | - | N.S. | N.S. |
| Guarantees | Technology | Methodology | Completeness |
|---|---|---|---|
| Deterministic | SMT | Katz et al. [10] | ✓ |
| Pulina and Tacchella [48] | × | ||
| Ehlers [34] | ✓ | ||
| MILP | Henriksen and Lomuscio [17] | ✓ | |
| Henriksen and Lomuscio [19] | ✓ | ||
| Bunel et al. [46] | ✓ | ||
| One sided | Abstract Interpretation | Guidotti et al. [16] | × |
| Singh et al. [14] | × | ||
| Tran et al. [15] | × | ||
| Convex Optimization | Wong and Kolter [50] | × | |
| Interval Analysis | Wang et al. [8] | × | |
| Linear Approximation | Zhang et al. [45] | × | |
| Weng et al. [49] | × | ||
| Converging | Layer-by-Layer Refinement | Huang et al. [53] | ✓ |
| Two-Player Game | Wu et al. [54] | × | |
| Wicker et al. [55] | × | ||
| Global Optimization | Ruan et al. [51] | × | |
| Ruan et al. [52] | × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guidotti, D.; Pandolfo, L.; Pulina, L. Leveraging Satisfiability Modulo Theory Solvers for Verification of Neural Networks in Predictive Maintenance Applications. Information 2023, 14, 397. https://doi.org/10.3390/info14070397
Guidotti D, Pandolfo L, Pulina L. Leveraging Satisfiability Modulo Theory Solvers for Verification of Neural Networks in Predictive Maintenance Applications. Information. 2023; 14(7):397. https://doi.org/10.3390/info14070397
Chicago/Turabian StyleGuidotti, Dario, Laura Pandolfo, and Luca Pulina. 2023. "Leveraging Satisfiability Modulo Theory Solvers for Verification of Neural Networks in Predictive Maintenance Applications" Information 14, no. 7: 397. https://doi.org/10.3390/info14070397
APA StyleGuidotti, D., Pandolfo, L., & Pulina, L. (2023). Leveraging Satisfiability Modulo Theory Solvers for Verification of Neural Networks in Predictive Maintenance Applications. Information, 14(7), 397. https://doi.org/10.3390/info14070397