




Model for the Detection of Falls with the Use of Artificial Intelligence as an Assistant for the Care of the Elderly

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Identification of the Environment and Its Needs
2.2. State of the Matter
2.3. Method
2.4. Development of the Fall Detection Model
- Walking, −90–28 cm/s
- Sit, 25–130 cm/s
- Crouch, 150–300 cm/s
- Falling, 285–535 cm/s
- 1 walk action
- 2 actions sit
- 3 action crouches
- 4 fall action
- print (’Fall detected’)
- cv2.imwrite (’/home/local/Desktop/Program/ImagenGenerada.jpg’, frame)
- cv2.putText (frame, ‘Fall detected’, (10, 100), font, fontScale, (255, 0, 0), thickness, cv2.LINEAA, False)
- bot.send message (chat, ”Fall detected in the room”)
- bot.send message (chat, now)
- bot.send photo (chat, img)
3. Results
- A = Accuracy
- S = Sensitivity
- S1 = Specificity
- TP = True positive
- FP = False positive
- FN = False negative
- TN = True negative
System Evaluation and Adjustments
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Abobakr, A.; Hossny, M.; Nahavandi, S. A Skeleton-Free Fall Detection System from Depth Images Using Random Decision Forest. IEEE Syst. J. 2017, 12, 2994–3005. [Google Scholar] [CrossRef]
- Behera, S.; Mohanty, M.N.; Patnaik, S. A Comparative Analysis on Edge Detection of Colloid Cyst: A Medical Imaging Approach. Stud. Comput. Intell. 2012, 395, 63–85. [Google Scholar] [CrossRef]
- Pierleoni, P.; Belli, A.; Maurizi, L.; Palma, L.; Pernini, L.; Paniccia, M.; Valenti, S. A Wearable Fall Detector for Elderly People Based on AHRS and Barometric Sensor. IEEE Sens. J. 2016, 16, 6733–6744. [Google Scholar] [CrossRef]
- Saleh, M.; Georgi, N.; Abbas, M.; le Bouquin Jeannès, R. A Highly Reliable Wrist-Worn Acceleration-Based Fall Detector. In Proceedings of the European Signal Processing Conference, A Coruña, Spain, 2–6 September 2019; Volume 2019. [Google Scholar]
- Jung, S.; Hong, S.; Kim, J.; Lee, S.; Hyeon, T.; Lee, M.; Kim, D.H. Wearable Fall Detector Using Integrated Sensors and Energy Devices. Sci. Rep. 2015, 5, 17081. [Google Scholar] [CrossRef]
- Instituto Nacional de Estadística y Censos. La Población Adulta Mayor Se Triplicaría En Los Próximos 40 Años. Available online: https://inec.cr/noticias/la-poblacion-adulta-mayor-se-triplicaria-los-proximos-40-anos (accessed on 8 August 2022).
- Carmona Valdés, S.E. El Bienestar Personal en el Envejecimiento; Ciencias Sociales de la Universidad Iberoamericana: Distrito Federal, México, 2009; Volume 3, pp. 48–65. [Google Scholar]
- Meeradevi, T.; Vikash Kumar, V.; Subhiksa, S.; Rajhan, V. Wearable Fall Detector for Elderly People; Innovations in Information and Communication Technology Series; Kongu Engineering College: Bengaluru, India, 2020. [Google Scholar] [CrossRef]
- Silva de Lima, A.L.; Smits, T.; Darweesh, S.K.L.; Valenti, G.; Milosevic, M.; Pijl, M.; Baldus, H.; de Vries, N.M.; Meinders, M.J.; Bloem, B.R. Home-Based Monitoring of Falls Using Wearable Sensors in Parkinson’s Disease. Mov. Disord. 2020, 35, 109–115. [Google Scholar] [CrossRef] [Green Version]
- Medrano, C.; Igual, R.; García-Magariño, I.; Plaza, I.; Azuara, G. Combining Novelty Detectors to Improve Accelerometer-Based Fall Detection. Med. Biol. Eng. Comput. 2017, 55, 1849–1858. [Google Scholar] [CrossRef] [Green Version]
- Silva, J.; Gomes, D.; Sousa, I.; Cardoso, J.S. Automated Development of Custom Fall Detectors: Position, Model and Rate Impact in Performance. IEEE Sens. J. 2020, 20, 5465–5472. [Google Scholar] [CrossRef]
- Chaccour, K.; Darazi, R.; el Hassani, A.H.; Andres, E. From Fall Detection to Fall Prevention: A Generic Classification of Fall-Related Systems. IEEE Sens. J. 2017, 17, 812–822. [Google Scholar] [CrossRef]
- Santos García, D.; López Ariztegui, N.; Cubo, E.; Vinagre Aragón, A.; García-Ramos, R.; Borrué, C.; Fernández-Pajarín, G.; Caballol, N.; Cabo, I.; Barrios-López, J.M.; et al. Clinical Utility of a Personalized and Long-Term Monitoring Device for Parkinson’s Disease in a Real Clinical Practice Setting: An Expert Opinion Survey on STAT-ONTM. Neurologia 2020, 1, 8. [Google Scholar] [CrossRef]
- Odunmbaku, A.; Rahmani, A.M.; Liljeberg, P.; Tenhunen, H. Elderly Monitoring System with Sleep and Fall Detector. In Proceedings of the Internet of Things. IoT Infrastructures Second International Summit, IoT 360° 2015, Rome, Italy, 27–29 October 2015; Volume 169. [Google Scholar]
- de Ramón-Fernández, A.; Ruiz-Fernández, D.; Marcos-Jorquera, D.; Gilart-Iglesias, V.; Vives-Boix, V. Monitoring-Based Model for Personalizing the Clinical Process of Crohn’s Disease. Sensors 2017, 17, 1570. [Google Scholar] [CrossRef] [Green Version]
- Goeuriot, L.; Pasi, G.; Viviani, M.; Villegas-Ch, W.; Molina, S.; de Janón, V.; Montalvo, E.; Mera-Navarrete, A. Proposal of a Method for the Analysis of Sentiments in Social Networks with the Use of R. Informatics 2022, 9, 63. [Google Scholar] [CrossRef]
- Villegas-Ch, W.; García-Ortiz, J.; Sánchez-Viteri, S. Identification of the Factors That Influence University Learning with Low-Code/No-Code Artificial Intelligence Techniques. Electronics 2021, 10, 1192. [Google Scholar] [CrossRef]
- Shen, L.; Zhang, Q.; Cao, G.; Xu, H. Fall Detection System Based on Deep Learning and Image Processing in Cloud Environment. In Proceedings of the 12th International Conference on Complex, Intelligent, and Software Intensive Systems (CISIS-2018), Matsue, Japan, 4–66 July 2018; Volume 772. [Google Scholar]
- Plechawska-Wójcik, M.; Rybka, J. Assessment and Comparison of Functionalities of Telemedical Applications. Int. J. Comput. Appl. 2014, 107, 8887. [Google Scholar] [CrossRef]
- Nho, Y.H.; Lim, J.G.; Kwon, D.S. Cluster-Analysis-Based User-Adaptive Fall Detection Using Fusion of Heart Rate Sensor and Accelerometer in a Wearable Device. IEEE Access 2020, 8, 40389–40401. [Google Scholar] [CrossRef]
- Alwan, M.; Rajendran, P.J.; Kell, S.; Mack, D.; Dalal, S.; Wolfe, M.; Felder, R. A Smart and Passive Floor-Vibration Based Fall Detector for Elderly; IEEE: Piscataway, NJ, USA, 2006. [Google Scholar]
- Wu, G.; Xue, S. Portable Preimpact Fall Detector with Inertial Sensors. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 16, 178–183. [Google Scholar] [CrossRef]
- Sheikh, S.Y.; Jilani, M.T. A Ubiquitous Wheelchair Fall Detection System Using Low-Cost Embedded Inertial Sensors and Unsupervised One-Class SVM. J. Ambient. Intell. Humaniz. Comput. 2021. [Google Scholar] [CrossRef]
- Oh, J.Y.; Choi, H.S.; Jung, S.H.; Kim, H.S.; Shin, H.Y. Development of Pallet Recognition System Using Kinect Camera. Int. J. Multimed. Ubiquitous Eng. 2014, 9, 227–232. [Google Scholar] [CrossRef]
- Roy, G.; Bhuiya, A.; Mukherjee, A.; Bhaumik, S. Kinect Camera Based Gait Data Recording and Analysis for Assistive Robotics-An Alternative to Goniometer Based Measurement Technique. Procedia Comput. Sci. 2018, 133, 763–771. [Google Scholar] [CrossRef]
- Abudarham, N.; Shkiller, L.; Yovel, G. Face Recognition in Humans and Machines. J. Vis. 2018, 18, 156. [Google Scholar] [CrossRef]
- de Oliveira, E.M.; Leme, D.S.; Barbosa, B.H.G.; Rodarte, M.P.; Alvarenga Pereira, R.G.F. A Computer Vision System for Coffee Beans Classification Based on Computational Intelligence Techniques. J. Food Eng. 2016, 171, 22–27. [Google Scholar] [CrossRef]
- Tarlak, F.; Ozdemir, M.; Melikdglu, M. Computer Vision System Approach in Colour Measurements of Foods: Part I. Development of Methodology. Food Sci. Technol. 2016, 36, 382–388. [Google Scholar] [CrossRef] [Green Version]
- Chmiel, M.; Słowiński, M. The Use of Computer Vision System to Detect Pork Defects. LWT 2016, 73, 473–480. [Google Scholar] [CrossRef]
- Utami, N.A.; Maharani, W.; Atastina, I. Personality Classification of Facebook Users According to Big Five Personality Using SVM (Support Vector Machine) Method. Procedia Comput. Sci. 2021, 179, 177–184. [Google Scholar] [CrossRef]
- Leong, W.C.; Bahadori, A.; Zhang, J.; Ahmad, Z. Prediction of Water Quality Index (WQI) Using Support Vector Machine (SVM) and Least Square-Support Vector Machine (LS-SVM). Int. J. River Basin Manag. 2021, 19, 149–156. [Google Scholar] [CrossRef]
- Aziz, O.; Klenk, J.; Schwickert, L.; Chiari, L.; Becker, C.; Park, E.J.; Mori, G.; Robinovitch, S.N. Validation of Accuracy of SVM-Based Fall Detection System Using Real-World Fall and Non-Fall Datasets. PLoS ONE 2017, 12, e0180318. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.C.; Hsieh, C.Y.; Hsu, S.J.P.; Chan, C.T. Impact of Sampling Rate on Wearable-Based Fall Detection Systems Based on Machine Learning Models. IEEE Sens. J. 2018, 18, 9882–9890. [Google Scholar] [CrossRef]
- Chhetri, S.; Alsadoon, A.; Al-Dala’in, T.; Prasad, P.W.C.; Rashid, T.A.; Maag, A. Deep Learning for Vision-Based Fall Detection System: Enhanced Optical Dynamic Flow. Comput. Intell. 2021, 37, 578–595. [Google Scholar] [CrossRef]
- Islam, M.; Tayan, O.; Islam, R.; Islam, S.; Nooruddin, S.; Kabir, M.N.; Islam, R. Deep Learning Based Systems Developed for Fall Detection: A Review. IEEE Access 2020, 8, 166117–166137. [Google Scholar] [CrossRef]
- Sarabia-Jácome, D.; Usach, R.; Palau, C.E.; Esteve, M. Highly-Efficient Fog-Based Deep Learning AAL Fall Detection System. Internet Things 2020, 11, 100185. [Google Scholar] [CrossRef]
- Castro-Luna, G.; Jiménez-Rodríguez, D. Relative and Absolute Reliability of a Motor Assessment System Using Kinect® Camera. Int. J. Environ. Res. Public Health 2020, 17, 5807. [Google Scholar] [CrossRef]
- Cevallos Salazar, G.F. Análisis Del Desempeño Del Sitio Web Del Instituto Ecuatoriano de Seguridad Social (IESS) Para Evaluar Su Accesibilidad y Usabilidad En Los Adultos Mayores de La Asociación de Jubilados de La “Hermandad de Ferroviarios” de La Ciudad de Quito. Propues. De. ComHumanit. Rev. Científica De Comun. 2020, 11, 149–178. [Google Scholar] [CrossRef]
- Ghifari, H.G.; Darlis, D.; Hartaman, A. Pendeteksi Golongan Darah Manusia Berbasis Tensorflow Menggunakan ESP32-CAM. ELKOMIKA J. Tek. Energi Elektr. Tek. Telekomun. Tek. Elektron. 2021, 9, 359. [Google Scholar] [CrossRef]
- Brahin, N.M.A.; Nasir, H.M.; Jidin, A.Z.; Zulkifli, M.F.; Sutikno, T. Development of Vocabulary Learning Application by Using Machine Learning Technique. Bull. Electr. Eng. Inform. 2020, 9, 362–369. [Google Scholar] [CrossRef]
- Huang, J. Accelerated Training and Inference with the Tensorflow Object Detection API; Huang, J., Ed.; Google AI Blog: Mountain View, CA, USA, 2017. [Google Scholar]
- Hsieh, C.H.; Lin, D.C.; Wang, C.J.; Chen, Z.T.; Liaw, J.J. Real-Time Car Detection and Driving Safety Alarm System with Google Tensorflow Object Detection API. In Proceedings of the International Conference on Machine Learning and Cybernetics, Kobe, Japan, 7–10 July 2019; Volume 2019. [Google Scholar]
- Aningtiyas, P.R.; Sumin, A.; Wirawan, S. Pembuatan Aplikasi Deteksi Objek Menggunakan TensorFlow Object Detection API Dengan Memanfaatkan SSD MobileNet V2 Sebagai Model Pra-Terlatih. J. Ilm. Komputasi 2020, 19, 421–430. [Google Scholar] [CrossRef]
- Manajang, D.J.P.; Sompie, S.R.U.A.; Jacobus, A. Implementasi Framework Tensorflow Object Detection API Dalam Mengklasifikasi Jenis Kendaraan Bermotor. J. Tek. Inform. 2020, 15, 171–178. [Google Scholar]
- Villegas-Ch, W.; García-Ortiz, J.; Mullo-Ca, K.; Sánchez-Viteri, S.; Roman-Cañizares, M. Implementation of a Virtual Assistant for the Academic Management of a University with the Use of Artificial Intelligence. Future Internet 2021, 13, 97. [Google Scholar] [CrossRef]
- Al-Azzo, F.; Taqi, A.M.; Milanova, M. Human Related-Health Actions Detection Using Android Camera Based on TensorFlow Object Detection API. Int. J. Adv. Comput. Sci. Appl. 2018, 9, 9–23. [Google Scholar] [CrossRef] [Green Version]
- Elgendi, M.; Picon, F.; Magnenat-Thalmann, N.; Abbott, D. Arm Movement Speed Assessment via a Kinect Camera: A Preliminary Study in Healthy Subjects. Biomed. Eng. Online 2014, 13, 88. [Google Scholar] [CrossRef] [Green Version]
- Park, C.; Kim, J.; Sohn, J.C.; Choi, H.J. A Wrist-Type Fall Detector with Statistical Classifier for the Elderly Care. KSII Trans. Internet Inf. Syst. 2011, 5, 1751–1768. [Google Scholar] [CrossRef]
- de Miguel, K.; Brunete, A.; Hernando, M.; Gambao, E. Home Camera-Based Fall Detection System for the Elderly. Sensors 2017, 17, 2864. [Google Scholar] [CrossRef]
- Brownsell, S.; Hawley, M. Fall Detectors: Do They Work or Reduce the Fear of Falling? Hous. Care Support 2004, 7, 18–24. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Person 1 | ||||||
|---|---|---|---|---|---|---|
| Samples | Total Predictions | |||||
| Fall | Crouch | Feel | Walk | Falls | No falls | |
| Fall | 14 | 1 | 0 | 0 | TP 14 | FN 1 |
| Crouch | 1 | 14 | 0 | 0 | ||
| Feel | 0 | 1 | 14 | 0 | FP 3 | TN 39 |
| Walk | 0 | 0 | 0 | 15 | ||
| Accuracy = 92.9% | Sensitivity = 93% | Specificity = 93% | ||||
| Person 2 | ||||||
| Samples | Total Predictions | |||||
| Fall | Crouch | Feel | Walk | Falls | No falls | |
| Fall | 15 | 0 | 0 | 0 | TP 15 | FN 0 |
| Crouch | 2 | 13 | 0 | 0 | ||
| Feel | 0 | 2 | 13 | 0 | FP 4 | TN 41 |
| Walk | 0 | 0 | 0 | 15 | ||
| Accuracy = 93.3% | Sensitivity = 100% | Specificity = 91% | ||||
| Person 3 | ||||||
| Samples | Total Predictions | |||||
| Fall | Crouch | Feel | Walk | Falls | No falls | |
| Fall | 15 | 0 | 0 | 0 | TP 15 | FN 0 |
| Crouch | 0 | 15 | 0 | 0 | ||
| Feel | 0 | 1 | 14 | 0 | FP 1 | TN 44 |
| Walk | 0 | 0 | 0 | 15 | ||
| Accuracy = 98.3% | Sensitivity = 100% | Specificity = 98% | ||||
| Criterion | Measurement 1 | Measurement 2 |
|---|---|---|
| Accuracy | 68.80% | 74% |
| Error range | 34.20% | 26% |
| Relative error | 3.14% | 11.24% |
| Processing | 110% | 69% |
| Memory | 63% | 15% |
| Storage | 0.038% | 0.006% |
| Cases | Absolute Frecuency | Relative Frequency |
|---|---|---|
| Falls | 360 | 0.7101 |
| False positives | 136 | 0.2682 |
| False negatives | 11 | 0.0217 |
| Total | 507 | 1 |
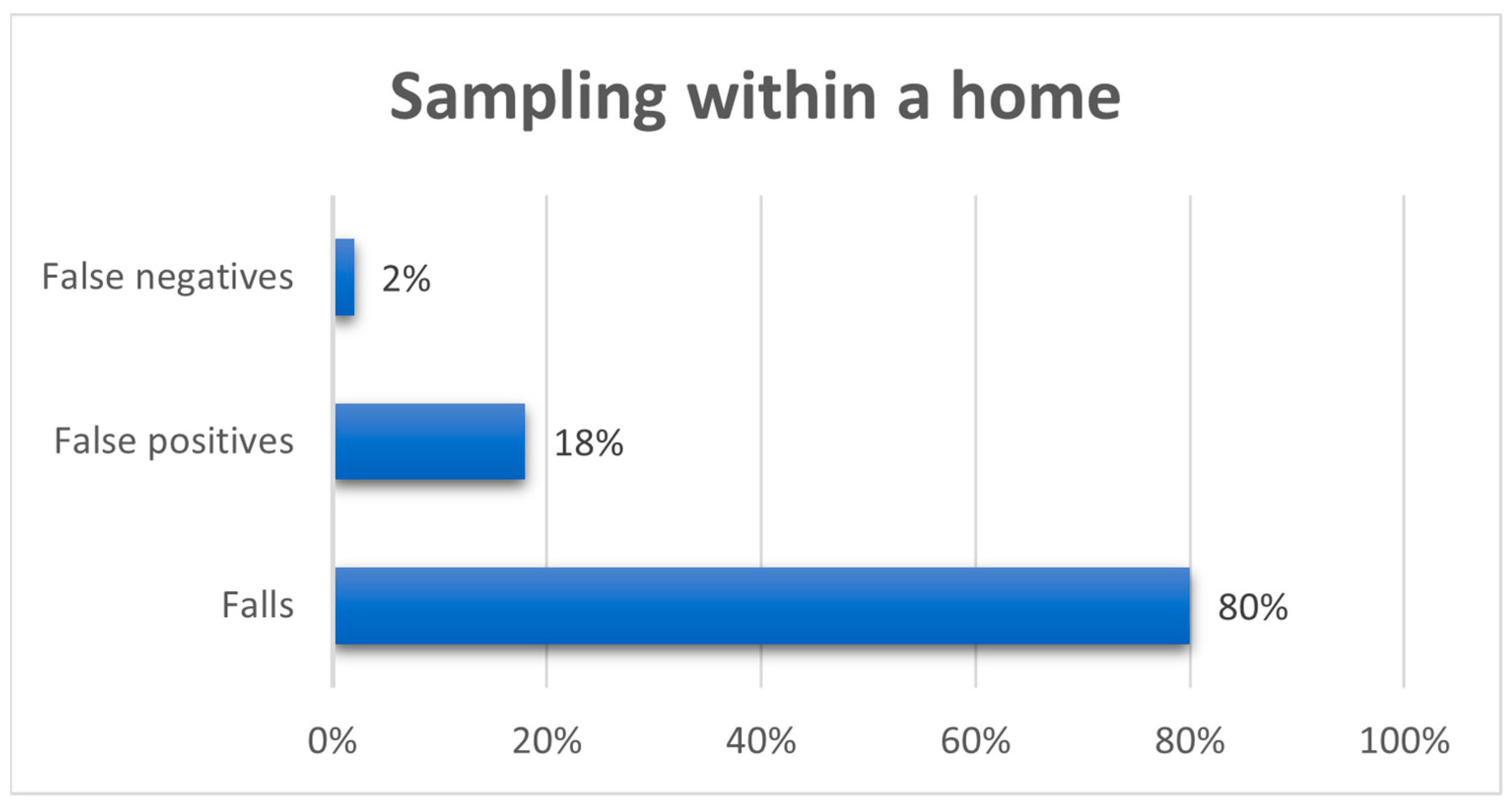
| Entorno | Falls | False Positives | False Negatives | Total |
|---|---|---|---|---|
| Room | 100 | 25 | 2 | 127 |
| Living room | 260 | 112 | 9 | 382 |
| Total | 360 | 136 | 11 | 507 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Villegas-Ch., W.; Barahona-Espinosa, S.; Gaibor-Naranjo, W.; Mera-Navarrete, A. Model for the Detection of Falls with the Use of Artificial Intelligence as an Assistant for the Care of the Elderly. Computation 2022, 10, 195. https://doi.org/10.3390/computation10110195
Villegas-Ch. W, Barahona-Espinosa S, Gaibor-Naranjo W, Mera-Navarrete A. Model for the Detection of Falls with the Use of Artificial Intelligence as an Assistant for the Care of the Elderly. Computation. 2022; 10(11):195. https://doi.org/10.3390/computation10110195
Chicago/Turabian StyleVillegas-Ch., William, Santiago Barahona-Espinosa, Walter Gaibor-Naranjo, and Aracely Mera-Navarrete. 2022. "Model for the Detection of Falls with the Use of Artificial Intelligence as an Assistant for the Care of the Elderly" Computation 10, no. 11: 195. https://doi.org/10.3390/computation10110195
APA StyleVillegas-Ch., W., Barahona-Espinosa, S., Gaibor-Naranjo, W., & Mera-Navarrete, A. (2022). Model for the Detection of Falls with the Use of Artificial Intelligence as an Assistant for the Care of the Elderly. Computation, 10(11), 195. https://doi.org/10.3390/computation10110195