
An Efficient Finite Element Framework to Assess Flexibility Performances of SMA Self-Expandable Carotid Artery Stents


Abstract
:1. Introduction
2. Materials and Methods
2.1. Souza-Auricchio Model: Time-Continuous Framework
2.2. Souza-Auricchio Model: Time-Discrete Framework
2.3. Souza-Auricchio Model: Numerical Implementation
2.4. Stent Model
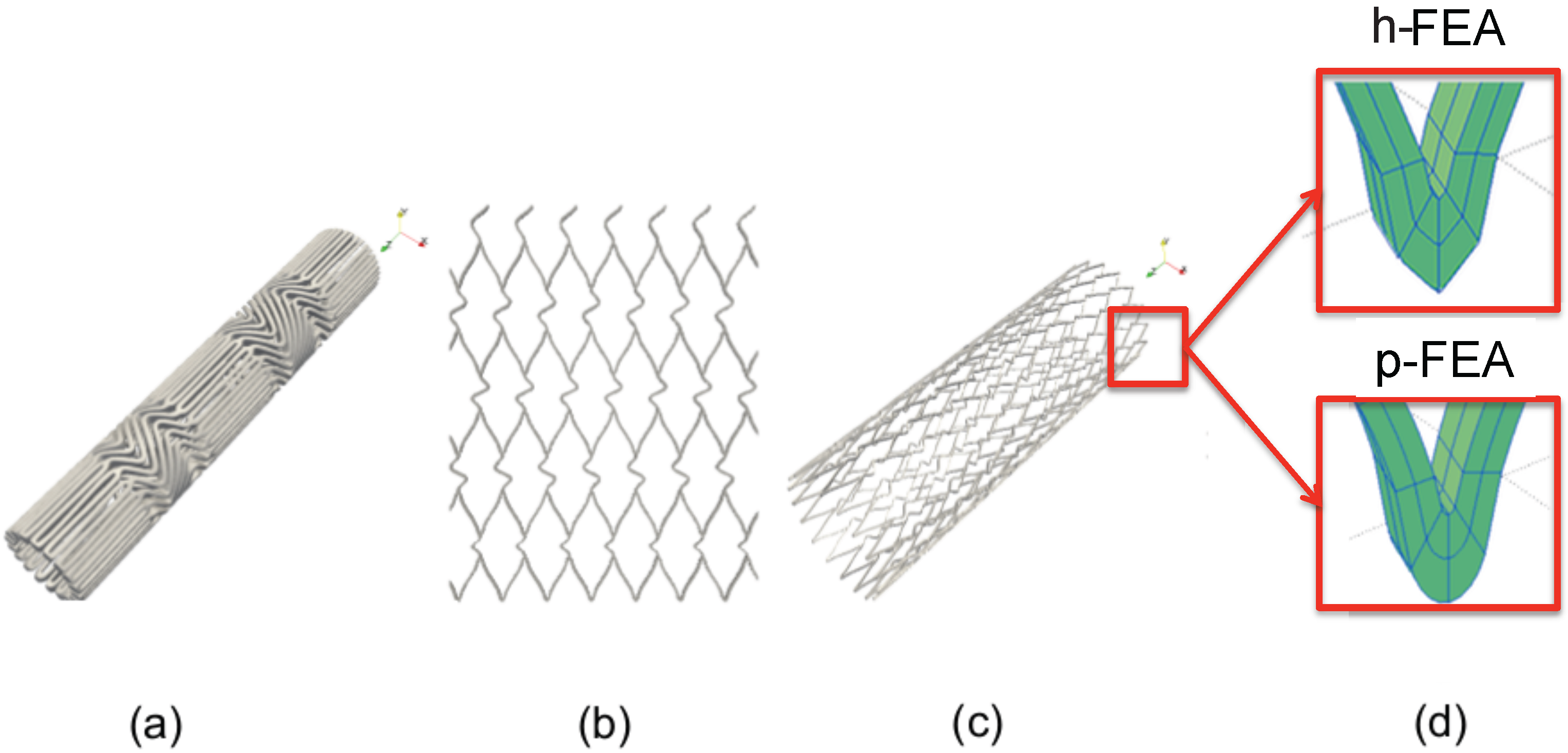
- The geometrical features derived by the micro-CT scans are elaborated using a parametrical model, in order to obtain a geometrical description corresponding to the unfold stent in open configuration.
- A planar CAD geometry (see Figure 1b) is generated. Subsequently, a 2D CAD NURBS surface for the whole stent is created.
- The CAD surface structure is extruded and rolled by means of an in-house MATLAB code (The MathWorks Inc. Natick, MA, USA) leading to the final stent in open configuration, as depicted in Figure 1c.
- The 3D trivariate CAD data are processed in order to obtain both h- and p-FEA meshes. At last, the FEA mesh is exported in a suitable format for the solver FEAP.

2.5. Analysis Setup

3. Results and Discussion


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh Label | DOF | Order | Reaction Force (N) | Critical Load (N) | ||||
|---|---|---|---|---|---|---|---|---|
| p | q | r | Value | Error | Value | Error | ||
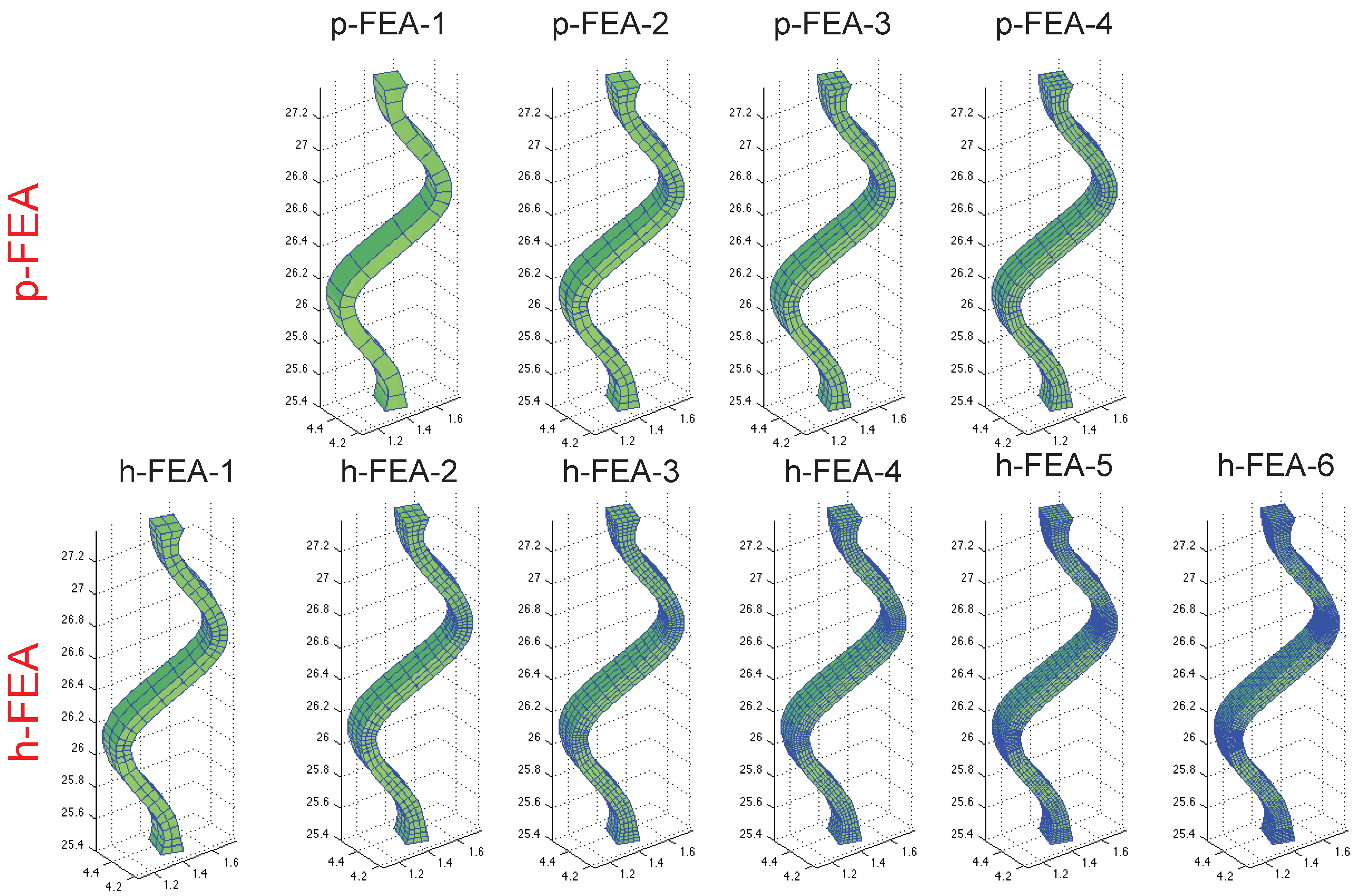
| FEA-1 | 606,276 | 1 | 1 | 1 | 1.0102 | 60.21% | 1.3354 | 47.76 % |
| FEA-2 | 1,635,960 | 1 | 1 | 1 | 0.91935 | 51.85% | 1.1671 | 29.14 % |
| FEA-3 | 2,118,096 | 1 | 1 | 1 | 0.89916 | 42.60 % | 1.1300 | 25.03 % |
| FEA-4 | 3,246,480 | 1 | 1 | 1 | 0.79611 | 26.25 % | 1.0754 | 18.99 % |
| FEA-5 | 5,281,740 | 1 | 1 | 1 | 0.73349 | 16.32 % | 0.99991 | 10.64 % |
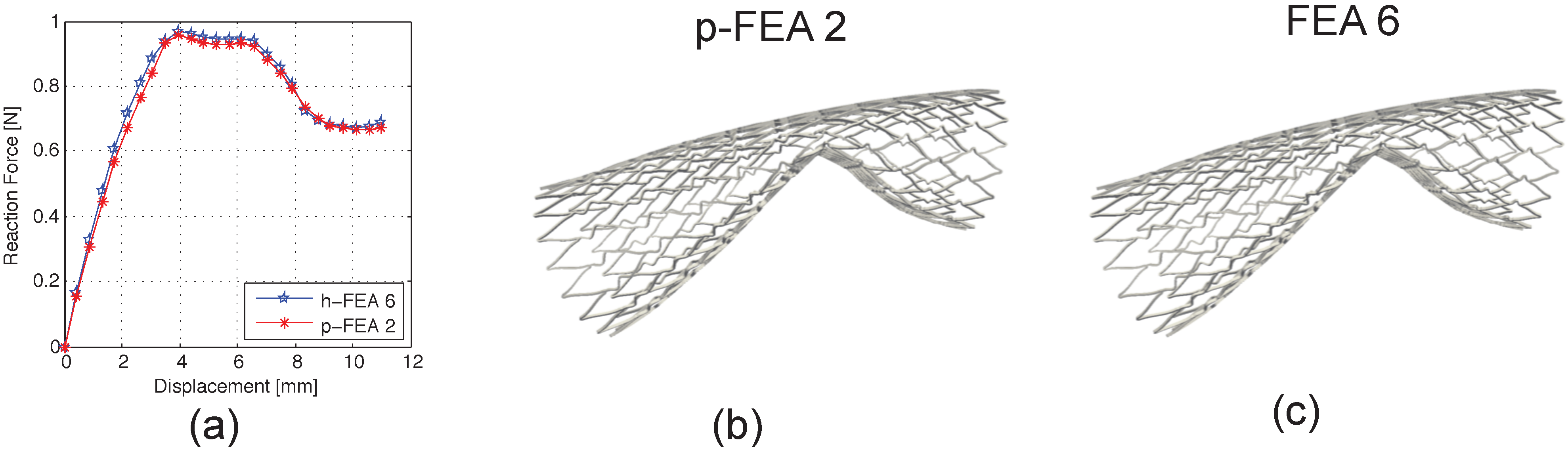
| FEA-6 | 10,622,016 | 1 | 1 | 1 | 0.68897 | 9.26 % | 0.97022 | 7.35 % |
| p-FEA-1 | 598,212 | 3 | 3 | 2 | 0.7725 | 22.51 % | 1.0342 | 14.31 % |
| p-FEA-2 | 1,844,820 | 3 | 3 | 2 | 0.6732 | 6.76% | 0.9544 | 5.49 % |
| p-FEA-3 | 3,469,668 | 3 | 3 | 2 | 0.6480 | 2.76 % | 0.91242 | 0.8 % |
| p-FEA-4 | 5,269,642 | 3 | 3 | 2 | 0.63054 | – | 0.90473 | – |

3.1. Computational Times
| Mesh Label | DOF | No. of CPUs | Solver | Total Analysis Time |
|---|---|---|---|---|
| p-FEA-2 | 1,844,820 | 1 | FEAP | 27 h 15 min |
| FEA-6 | 10,622,016 | 8 | Abaqus/Standard | 26 h 23 min |
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Roffi, M.; Mathias, K. History of carotid artery stenting. J. Cardiovasc. Surg. 2013, 54, 1–10. [Google Scholar]
- Brott, T.G.; Hobson, R.W.; Howard, G.; Roubin, G.S.; Clark, W.M.; Brooks, W.; Mackey, A.; Hill, M.D.; Leimgruber, P.P.; Sheffet, A.J.; et al. Stenting versus endarterectomy for treatment of carotid-artery stenosis. New Engl. J. Med. 2010, 363, 11–23. [Google Scholar] [CrossRef] [PubMed]
- Lally, C.; Kelly, D.; Prendergast, P. Stents. In Wiley Encyclopedia of Biomedical Engineering; John Wiley & Sons: Chichester, UK, 2006. [Google Scholar]
- Duda, S.H.; Wiskirchen, J.; Tepe, G.; Bitzer, M.; Kaulich, T.W.; Stoeckel, D.; Claussen, C.D. Physical properties of endovascular stents: An experimental comparison. J. Vasc. Interv. Radiol. 2000, 11, 645–654. [Google Scholar] [CrossRef]
- Dyet, J.F.; Watts, W.G.; Ettles, D.F.; Nicholson, A.A. Mechanical properties of metallic stents: How do these properties influence the choice of stent for specific lesions? Cardiovasc. Interv. Radiol. 2000, 23, 47–54. [Google Scholar] [CrossRef]
- Müller-Hülsbeck, S.M; Schafer, P.; Charalambous, N.; Schaffner, S.; Heller, M.; Jahnke, T. Comparison of carotid stents: An in-vitro experiment focusing on stent design. J. Endovasc. Ther. 2009, 16, 168–177. [Google Scholar] [CrossRef] [PubMed]
- Conti, M.; Van Loo, D.; Auricchio, F.; De Beule, M.; De Santis, G.; Verhegghe, B.; Pirrelli, S.; Odero, A. Impact of carotid stent cell design on vessel scaffolding: A case study comparing experimental investigation and numerical simulations. J. Endovasc. Ther. 2011, 18, 397–406. [Google Scholar] [CrossRef] [PubMed]
- Grogan, J.; Leen, S.; McHugh, P. Comparing coronary stent material performance on a common geometric platform through simulated bench testing. J. Mech. Behav. Biomed. Mater. 2012, 6, 129–138. [Google Scholar] [CrossRef] [PubMed]
- Auricchio, F.; Conti, M.; De Beule, M.; De Santis, G.; Verhegghe, B. Carotid artery stenting simulation: from patient-specific images to finite element analysis. Med. Eng. & Phys. 2011, 33, 281–289. [Google Scholar]
- Kleinstreuer, C.; Li, Z.; Basciano, C.; Seelecke, S.; Farber, M. Computational mechanics of nitinol stent grafts. J. Biomech. 2008, 41, 2370–2378. [Google Scholar] [CrossRef] [PubMed]
- Mortier, P.; Holzapfel, G.; De Beule, M.; Van Loo, D.; Taeymans, Y.; Segers, P.; Verdonck, P.; Verhegghe, B. A novel simulation strategy for stent insertion and deployment in curved coronary bifurcations: Comparison of three drug-eluting stents. Ann. Biomed. Eng. 2010, 38, 88–99. [Google Scholar] [CrossRef] [PubMed]
- Falvo, A. Thermo mechanical characterization of nickel-titanium shape memory alloys. Ph.D. Thesis, University of Calabria, Cosenza, Italy, 2007. [Google Scholar]
- Melzer, A.; Stoeckel, D. Function and performance of nitinol vascular implants. Open Med. Devices J. 2010, 2, 32–41. [Google Scholar] [CrossRef]
- Carnelli, D.; Pennati, G.; Villa, T.; Baglioni, L.; Reimers, B.; Migliavacca, F. Mechanical properties of open-cell, self-expandable shape memory alloy carotid stents. Artif. Organs 2011, 35, 74–80. [Google Scholar] [CrossRef] [PubMed]
- Mori, K.; Saito, T. Effects of stent structure on stent flexibility measurements. Ann. Biomed. Eng. 2005, 6, 733–742. [Google Scholar] [CrossRef]
- Petrini, L.; Migliavacca, F.; Auricchio, F.; Dubini, G. Numerical investigation of the intravascular coronary stent flexibility. J. Biomech. 2004, 37, 495–501. [Google Scholar] [CrossRef] [PubMed]
- Petrini, L.; Migliavacca, F.; Massarotti, P.; Schievano, S.; Auricchio, F.; Dubini, G. Computational studies of shape memory alloy behavior in biomedical applications. Prog. Biomed. Res. 2005, 127, 716–725. [Google Scholar] [CrossRef]
- Taylor, R.L. FEAP—A Finite Element Analysis Program; University of California at Berkeley: Berkeley, CA, USA, 2013. [Google Scholar]
- Souza, A.; Mamiya, E.; Zouain, N. Three-dimensional model for solids undergoing stress-induced phase transformations. Eur. J. Mech. A Solids 1998, 17, 789–806. [Google Scholar] [CrossRef]
- Auricchio, F.; Petrini, L. A three-dimensional model describing stress-temperature induced solid phase transformations: Solution algorithm and boundary value problems. Int. J. Numer. Methods Eng. 2004, 61, 807–836. [Google Scholar] [CrossRef]
- Gurtin, M. An Introduction to Continuum Mechanics; Academic Press: New York, NY, USA, 1981. [Google Scholar]
- Simo, J.; Hughes, T.J.R. Computational Inelasticity; Springer-Verlag: New York, NY, USA, 1998. [Google Scholar]
- Bonet, J.; Wood, R.D. Nonlinear Continuum Mechanics for Finite Element Analysis; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Spink, M. Nurbs toolbox. Available online: http://www.aria.uklinux.net/nurbs.php3 (accessed on 13 July 2015).
- De Falco, C.; Reali, A.; Vázquez, R. GeoPdDEs: A research tool for isogeometric analysis of PDEs. Adv. Eng. Softw. 2010, 42, 1020–1034. [Google Scholar] [CrossRef]
- Piegl, L.; Tiller, W. The NURBS Book; Springer: New York, NY, USA, 2007. [Google Scholar]
- Auricchio, F.; Conti, M.; Morganti, S.; Reali, A. Shape-memory alloys: From constitutive modeling to finite element analysis of stent deployment. Comput. Model. Eng. Sci. 2010, 57, 225–243. [Google Scholar]
- Stoeckel, D. Nitinol medical devices and implants. Minim. Invasive Ther. & Allied Technol. 2000, 9, 81–88. [Google Scholar] [CrossRef]
- Hughes, T.; Reali, A.; Sangalli, G. Duality and unified analysis of discrete approximations in structural dynamics and wave propagation: Comparison of p-method finite elements with k-method nurbs. Comput. Methods Appl. Mech. Eng. 2008, 197, 4104–4124. [Google Scholar] [CrossRef]
- Reali, A. An isogeometric analysis approach for the study of structural vibrations. J. Earthq. Eng. 2006, 10, 1–30. [Google Scholar] [CrossRef]
- Hughes, T.; Evans, J.; Reali, A. Finite element and nurbs approximations of eigenvalue, boundary-value, and initial-value problems. Comput. Methods Appl. Mech. Eng. 2014, 272, 290–320. [Google Scholar] [CrossRef]
- Cottrell, J.; Hughes, T.; Bazilevs, Y. Isogeometric Analysis. Towards integration of CAD and FEA; John Wiley & Sons: Chichester, UK, 2009. [Google Scholar]
- Morganti, S.; Auricchio, F.; Benson, D.; Gambarin, F.; Hartmann, S.; Hughes, T.; Reali, A. Patient-specific isogeometric structural analysis of aortic valve closure. Comput. Methods Appl. Mech. Eng. 2015, 284, 508–520. [Google Scholar] [CrossRef]
© 2015 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ferraro, M.; Auricchio, F.; Boatti, E.; Scalet, G.; Conti, M.; Morganti, S.; Reali, A. An Efficient Finite Element Framework to Assess Flexibility Performances of SMA Self-Expandable Carotid Artery Stents. J. Funct. Biomater. 2015, 6, 585-597. https://doi.org/10.3390/jfb6030585
Ferraro M, Auricchio F, Boatti E, Scalet G, Conti M, Morganti S, Reali A. An Efficient Finite Element Framework to Assess Flexibility Performances of SMA Self-Expandable Carotid Artery Stents. Journal of Functional Biomaterials. 2015; 6(3):585-597. https://doi.org/10.3390/jfb6030585
Chicago/Turabian StyleFerraro, Mauro, Ferdinando Auricchio, Elisa Boatti, Giulia Scalet, Michele Conti, Simone Morganti, and Alessandro Reali. 2015. "An Efficient Finite Element Framework to Assess Flexibility Performances of SMA Self-Expandable Carotid Artery Stents" Journal of Functional Biomaterials 6, no. 3: 585-597. https://doi.org/10.3390/jfb6030585
APA StyleFerraro, M., Auricchio, F., Boatti, E., Scalet, G., Conti, M., Morganti, S., & Reali, A. (2015). An Efficient Finite Element Framework to Assess Flexibility Performances of SMA Self-Expandable Carotid Artery Stents. Journal of Functional Biomaterials, 6(3), 585-597. https://doi.org/10.3390/jfb6030585