
Strain-Gradient Bar-Elastic Substrate Model with Surface-Energy Effect: Virtual-Force Approach

 , , ,
, , , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
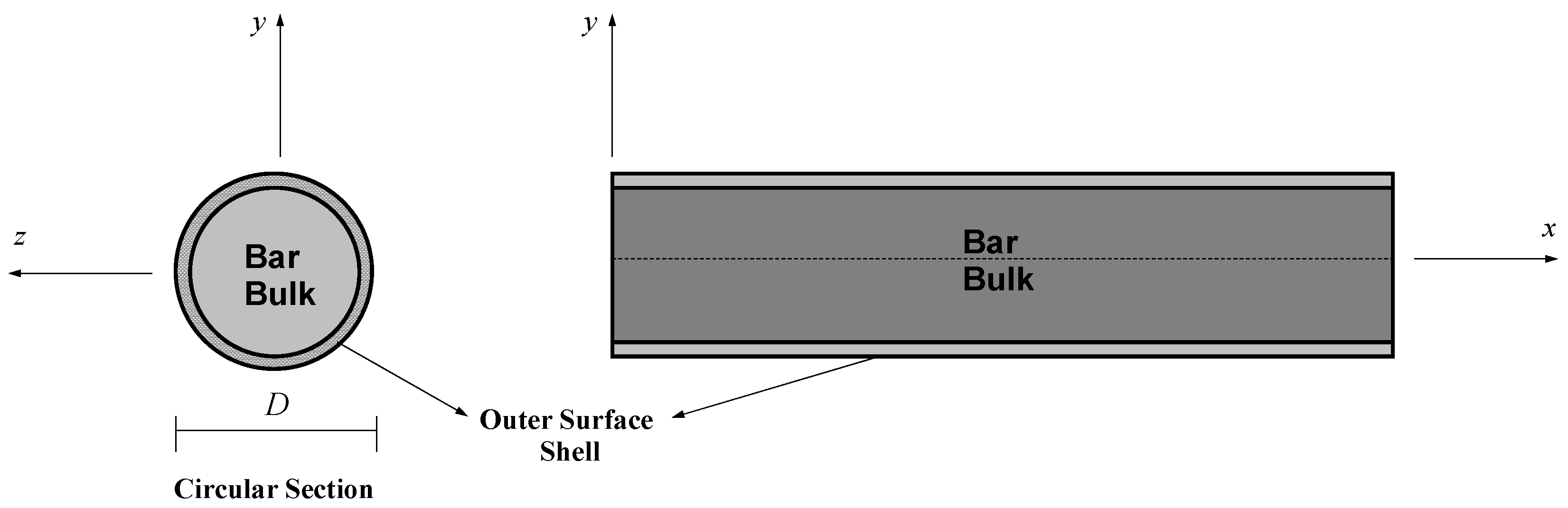
2. Strain Gradient Bars with Inclusion of Surface-Free Energy
2.1. Simplified Strain-Gradient Model
2.2. Surface Elasticity Theory
3. Bar-Substrate Medium Interaction
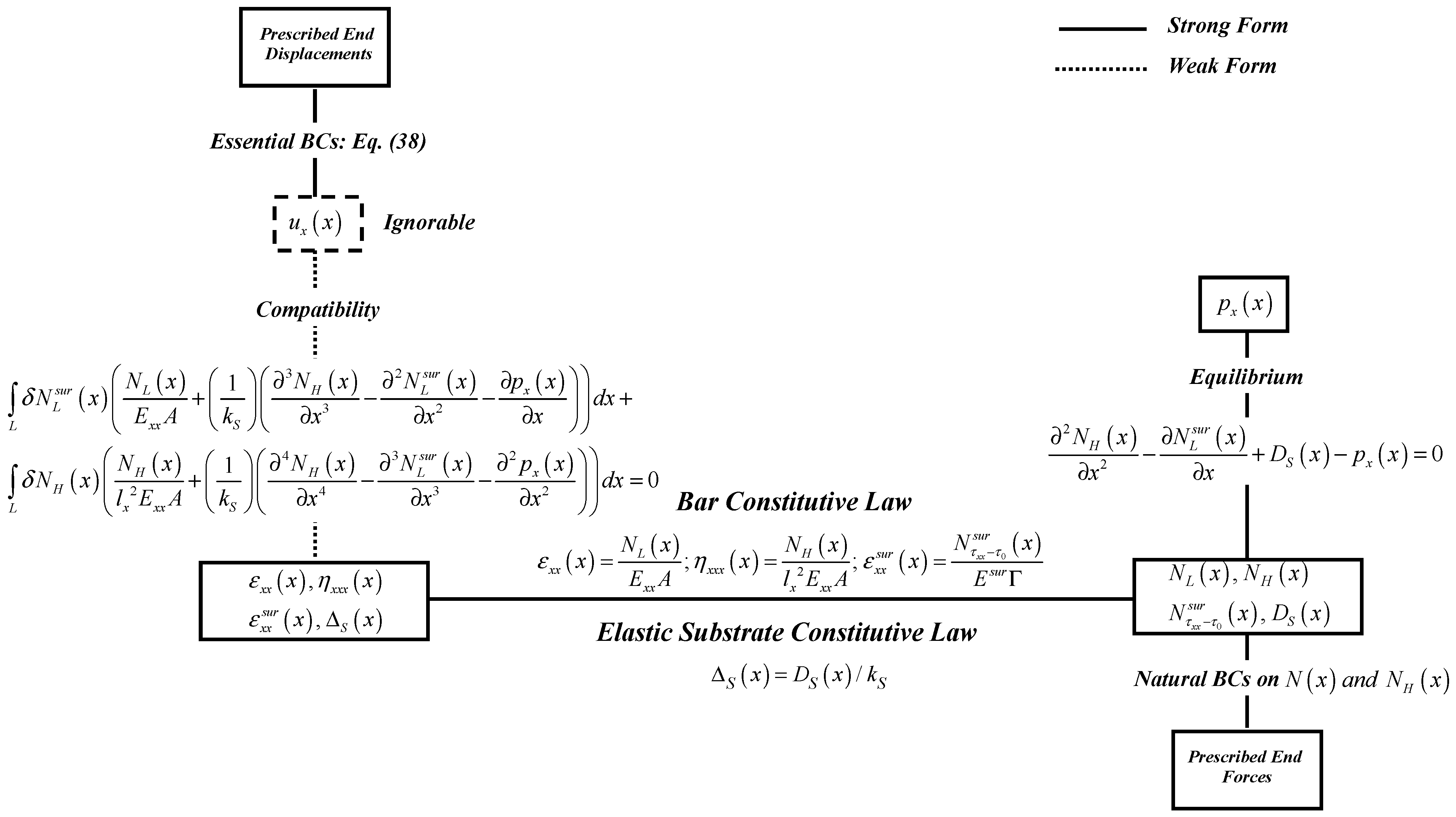
4. Model Formulation
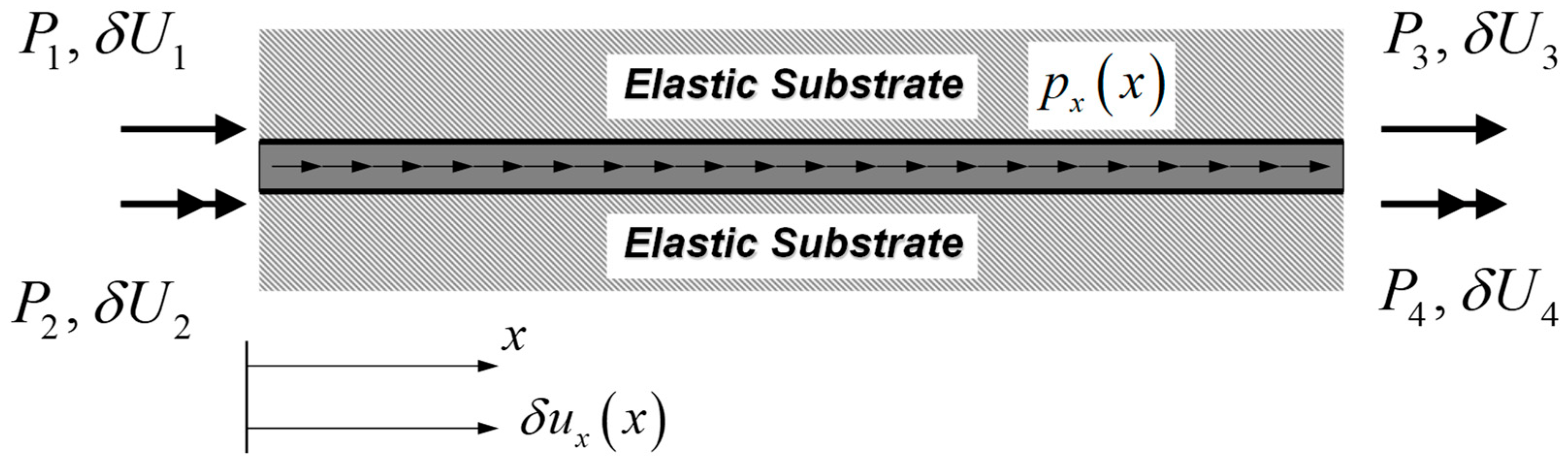
4.1. Differential Equilibrium Equation and End-Force Equilibrium Conditions: The Virtual Displacement Approach
4.2. Sectional Constitutive Relations: Compliance Form
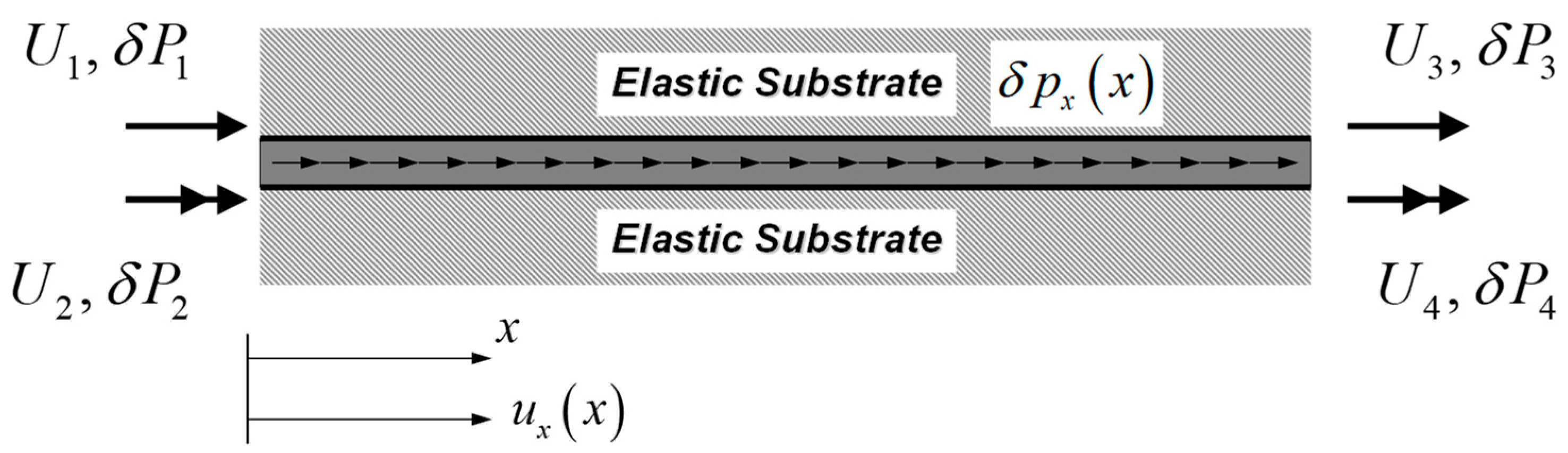
4.3. Differential Compatibility Equations and End-Displacement Compatibility Conditions: The Virtual Force Approach
5. Analytical Solution of Differential Compatibility Equation: Axial-Force Solution
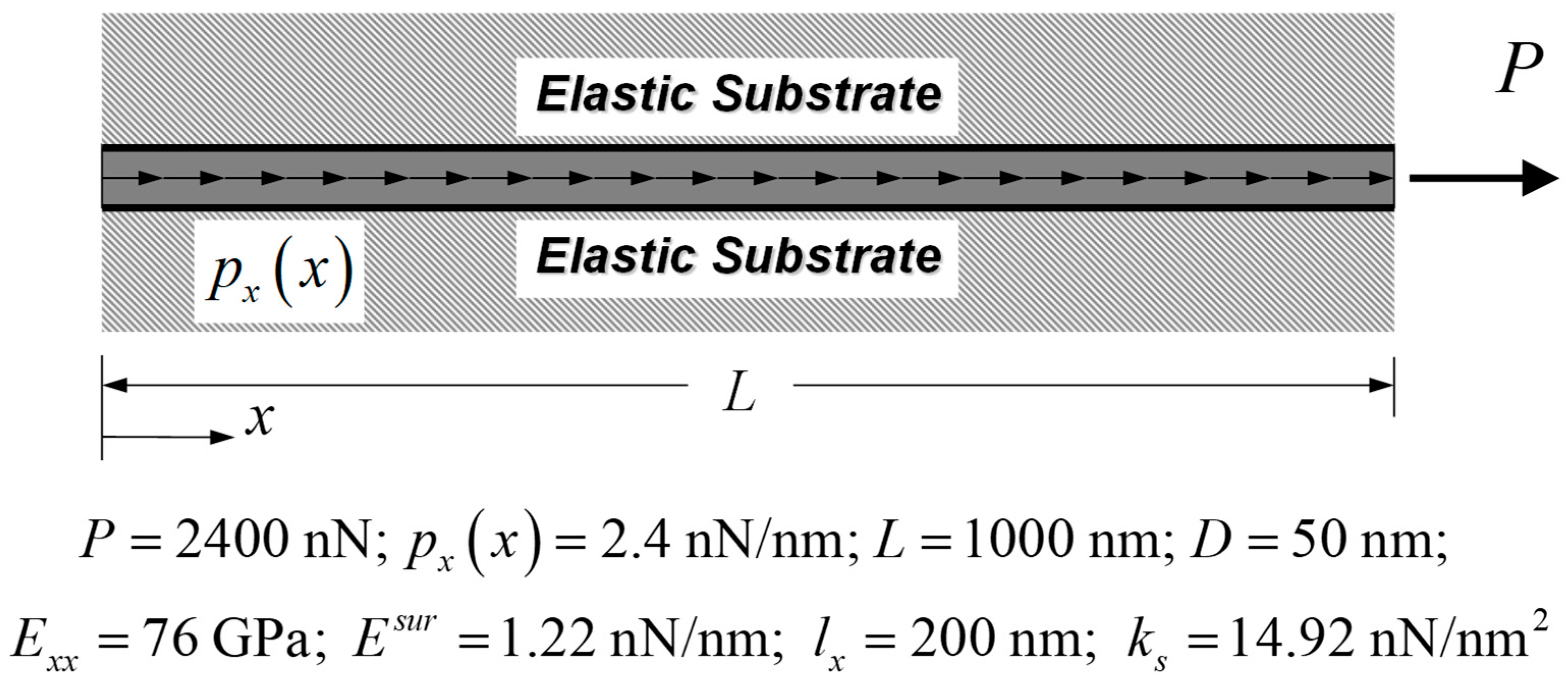
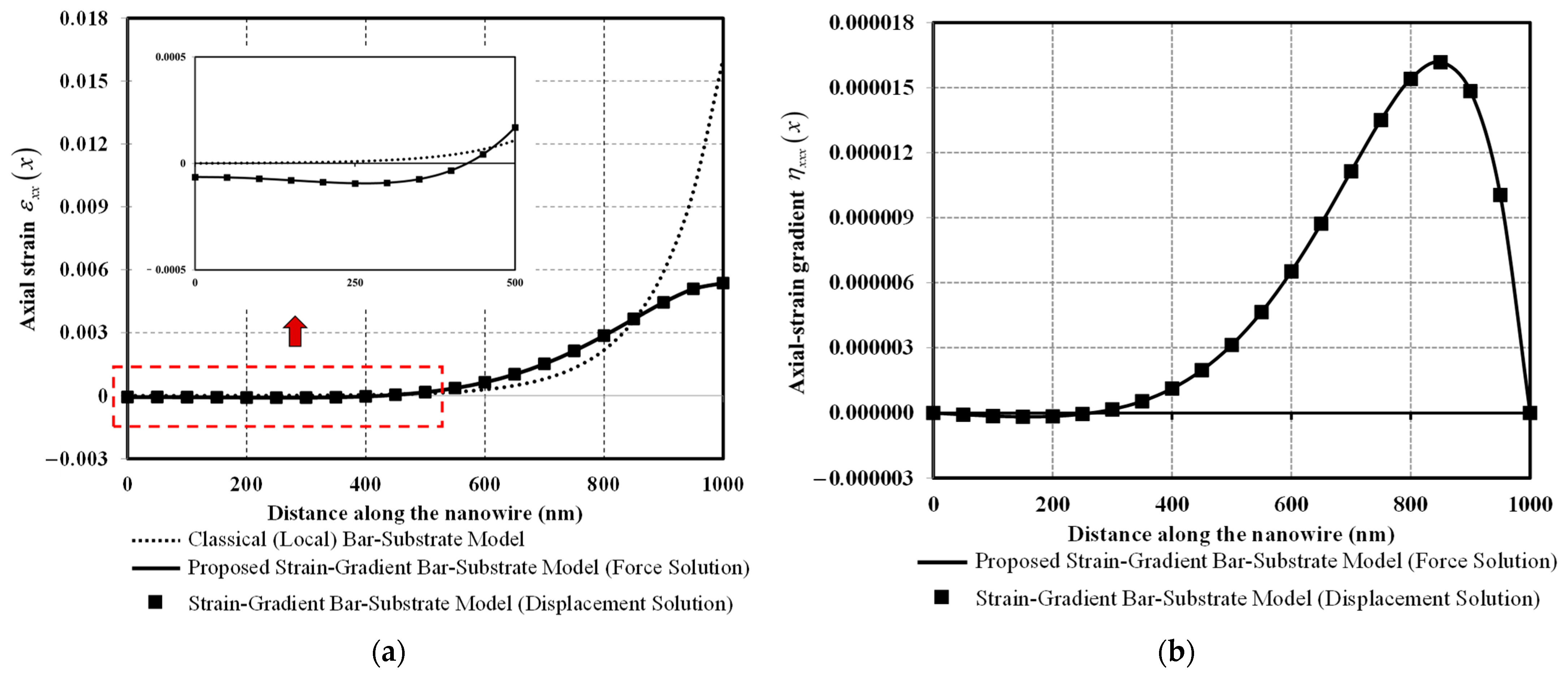
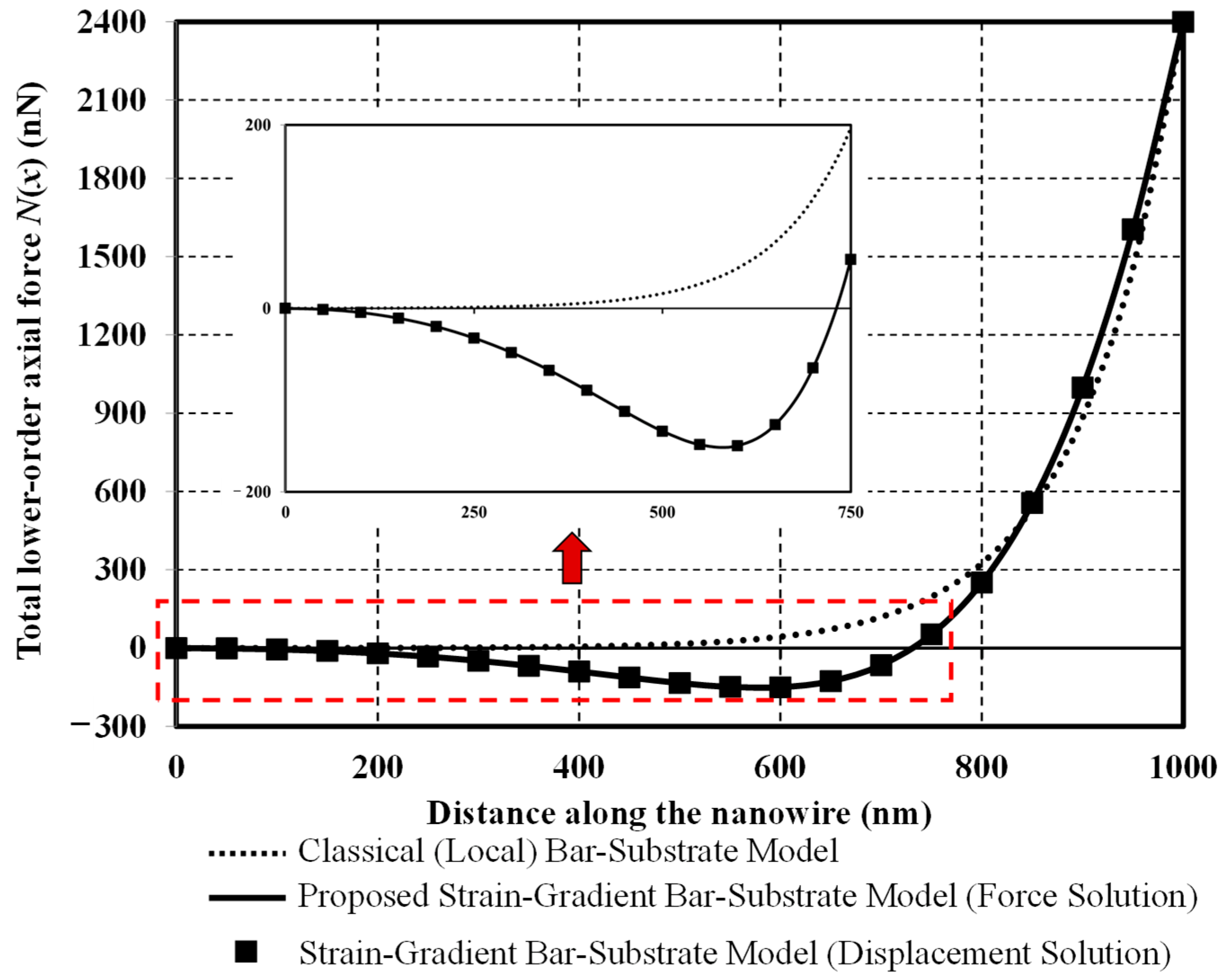
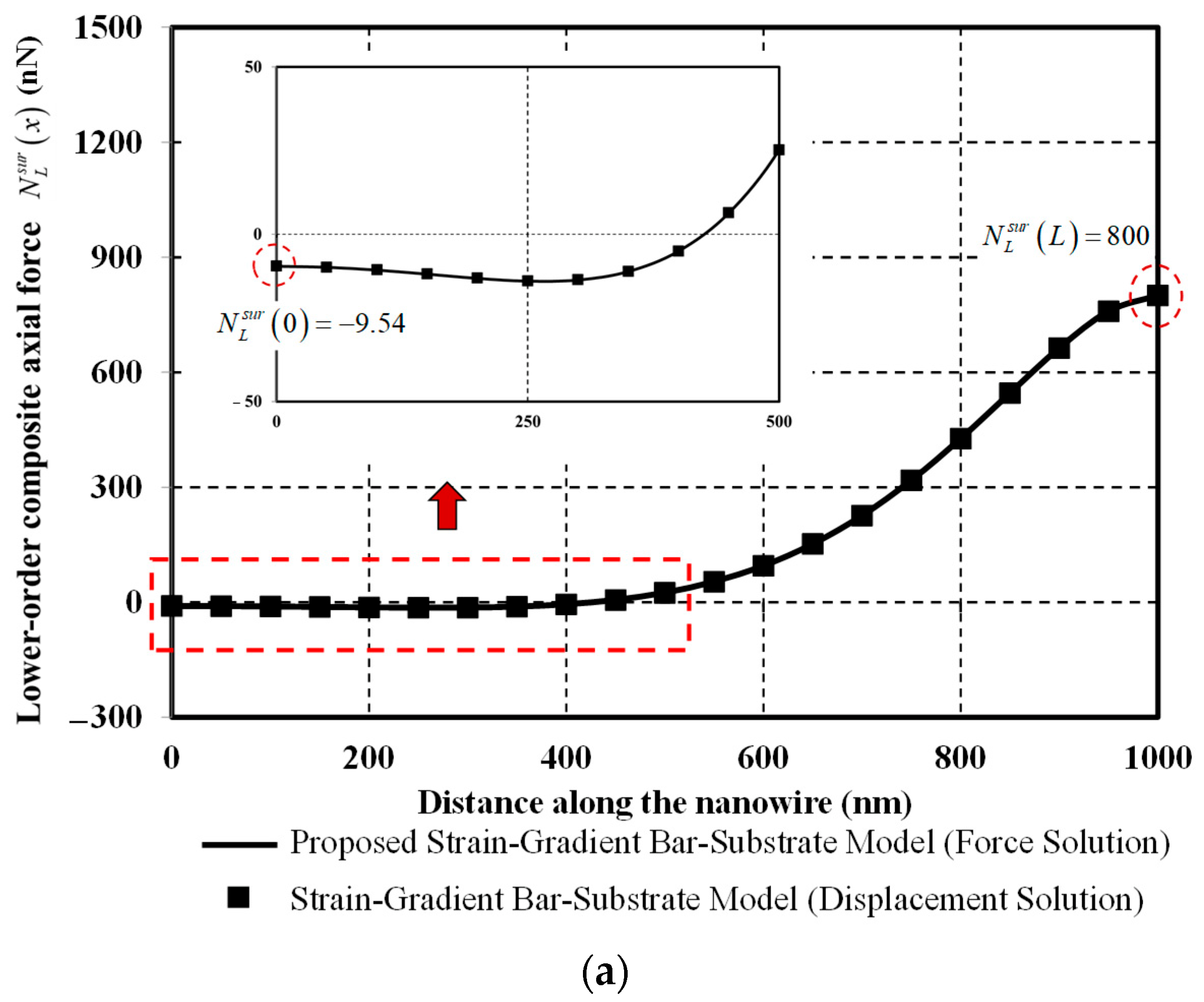
6. Numerical Example
7. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Awrejcewicz, J.; Krysko, A.V.; Zhigalov, M.V.; Krysko, V.A. Size-dependent theories of beams, plates and shells. In: Mathematical modelling and numerical analysis of size-dependent structural members in temperature fields. Adv. Struct. Mater. 2021, 142, 25–78. [Google Scholar]
- Soltan Rezaee, M.; Bodaghi, M. Simulation of an electrically actuated cantilever as a novel biosensor. Sci. Rep. 2020, 10, 3385. [Google Scholar] [CrossRef] [PubMed]
- Yan, Z.; Jiang, L. Modified continuum mechanics modeling on size-dependent properties of piezoelectric nanomaterials: A review. Nanomaterials 2017, 7, 27. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lei, X.-W.; Bando, K.; Shi, J.-X. Vibration control of diamond nanothreads by lattice defect introduction for application in nanomechanical sensors. Nanomaterials 2021, 11, 2241. [Google Scholar] [CrossRef]
- Larkin, K.; Ghommem, M.; Serrano, M.; Abdelkefi, A. A review on vibrating beam-based micro/nano-gyroscopes. Microsyst. Technol. 2021, 27, 4157–4181. [Google Scholar] [CrossRef]
- Tharu, S.A.; Panchal, M.B. Effect of interphase on elastic and shear moduli of metal matrix nanocomposites. Eur. Phys. J. Plus 2020, 135, 121. [Google Scholar] [CrossRef]
- Malikan, M.; Eremeyev, V.A. Effect of surface on the flexomagnetic response of ferroic composite nanostructures; nonlinear bending analysis. Compos. Struct. 2021, 271, 114179. [Google Scholar] [CrossRef]
- Abazari, A.M.; Fotouhi, M.; Tavakkoli, H.; Rezazadeh, G. An experimental study for characterization of size-dependence in microstructures via electrostatic pull-in instability technique. Appl. Phys. Lett. 2020, 116, 244102. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Wang, B.; Cheng, H.; Cheng, X.; Huang, Z. DFT study on Al-doped defective graphene towards adsorption of elemental mercury. Appl. Surf. Sci. 2018, 427, 547–553. [Google Scholar] [CrossRef]
- Madani, S.H.; Sabour, M.H.; Fadaee, M. Molecular dynamics simulation of vibrational behavior of annular graphene sheet: Identification of nonlocal parameter. J. Mol. Graph. Modell. 2018, 79, 264–272. [Google Scholar] [CrossRef]
- Shahabodini, A.; Gholami, Y.; Ansari, R.; Rouhi, H. Vibration analysis of graphene sheets resting on Winkler/Pasternak foundation: A multiscale approach. Eur. Phys. J. Plus 2019, 134, 510. [Google Scholar] [CrossRef]
- Limkatanyu, S.; Damrongwiriyanupap, N.; Prachasaree, W.; Sae-Long, W. Modeling of axially loaded nanowires embedded in elastic substrate media with inclusion of nonlocal and surface effects. J. Nanomater. 2013, 2013, 635428. [Google Scholar] [CrossRef]
- Gao, X.-L.; Zhang, G.Y. A non-classical Mindlin plate model incorporating microstructure, surface energy and foundation effects. Proc. Math. Phys. Eng. Sci. 2016, 472, 20160275. [Google Scholar] [CrossRef] [Green Version]
- Malikan, M.; Jabbarzadeh, M.; Dastjerdi, S. Non-linear static stability of bi-layer carbon nanosheets resting on an elastic matrix under various types of in-plane shearing loads in thermo-elasticity using nonlocal continuum. Microsyst. Technol. 2017, 23, 2973–2991. [Google Scholar] [CrossRef]
- Demir, C.; Mercan, K.; Numanoglu, H.M.; Civalek, O. Bending response of nanobeams resting on elastic foundation. J. Appl. Comput. Mech. 2018, 4, 105–114. [Google Scholar]
- Panyatong, M.; Chinnaboon, B.; Chucheepsakul, S. Nonlinear bending analysis of nonlocal nanoplates with general shapes and boundary conditions by the boundary-only method. Eng. Anal. Bound. Elem. 2018, 87, 90–110. [Google Scholar] [CrossRef]
- Sarafraz, A.; Sahmani, S.; Aghdam, M.M. Nonlinear primary resonance analysis of nanoshells including vibrational mode interactions based on the surface elasticity theory. Appl. Math. Mech. 2020, 41, 233–260. [Google Scholar] [CrossRef]
- Russillo, A.F.; Failla, G.; Alotta, G.; Marotti de Sciarra, F.; Barretta, R. On the dynamics of nano-frames. Int. J. Eng. Sci. 2021, 160, 103433. [Google Scholar] [CrossRef]
- Mindlin, R.D. On the equations of elastic materials with micro-structure. Int. J. Solids Struct. 1965, 1, 73–78. [Google Scholar] [CrossRef]
- Eringen, A.C. Nonlocal polar elastic continua. Int. J. Eng. Sci. 1972, 10, 1–16. [Google Scholar] [CrossRef]
- Eringen, A.C. On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J. Appl. Phys. 1983, 54, 4703–4710. [Google Scholar] [CrossRef]
- Yang, F.; Chong, A.C.M.; Lam, D.C.C.; Tong, P. Couple stress based strain gradient theory for elasticity. Int. J. Solids Struct. 2002, 39, 2731–2743. [Google Scholar] [CrossRef]
- Papargyri-Beskou, S.; Tsepoura, K.G.; Polyzos, D.; Beskos, D.E. Bending and stability analysis of gradient elastic beams. Int. J. Solids Struct. 2003, 40, 385–400. [Google Scholar] [CrossRef]
- Barretta, R.; Marotti de Sciarra, F. A nonlocal model for carbon nanotubes under axial loads. Adv. Mater. Sci. Eng. 2013, 2013, 360935. [Google Scholar] [CrossRef] [Green Version]
- Lazopoulos, A.K.; Lazopoulos, K.A.; Palassopoulos, G. Nonlinear bending and buckling for strain gradient elastic beams. Appl. Math. Modell. 2014, 38, 253–262. [Google Scholar] [CrossRef]
- Zhang, G.Y.; Gao, X.-L. A new Bernoulli–Euler beam model based on a reformulated strain gradient elasticity theory. Math. Mech. Solids 2020, 25, 630–643. [Google Scholar] [CrossRef]
- Peddieson, J.; Buchanan, G.R.; McNitt, R.P. Application of nonlocal continuum models to nanotechnology. Int. J. Eng. Sci. 2003, 41, 305–312. [Google Scholar] [CrossRef]
- Reddy, J.N. Nonlocal theories for bending, buckling, and vibration of beams. Int. J. Eng. Sci. 2007, 45, 288–307. [Google Scholar] [CrossRef]
- Pradhan, S.C.; Reddy, G.K. Buckling analysis of single walled carbon nanotube on Winkler foundation using nonlocal elasticity theory and DTM. Comput. Mater. Sci. 2011, 50, 1052–1056. [Google Scholar] [CrossRef]
- Limkatanyu, S.; Sae-Long, W.; Horpibulsuk, S.; Prachasaree, W.; Damrongwiriyanupap, N. Flexural responses of nanobeams with coupled effects of nonlocality and surface energy. ZAMM 2018, 98, 1771–1793. [Google Scholar] [CrossRef]
- Shishesaz, M.; Shariati, M.; Yaghootian, A. Nonlocal elasticity effect on linear vibration of nano-circular plate using adomian decomposition method. J. Appl. Comput. Mech. 2020, 6, 63–76. [Google Scholar]
- Nasr, M.E.; Abouelregal, A.E.; Soleiman, A.; Khalil, K.M. Thermoelastic vibrations of nonlocal nanobeams resting on a Pasternak foundation via DPL model. J. Appl. Comput. Mech. 2021, 7, 34–44. [Google Scholar]
- Challamel, N.; Wang, C.M. The small length scale effect for a non-local cantilever beam: A paradox solved. Nanotechnology 2008, 19, 345703. [Google Scholar] [CrossRef]
- Lim, C.W. On the truth of nanoscale for nanobeams based on nonlocal elastic stress field theory: Equilibrium, governing equation and static deflection. Appl. Math. Mech. 2010, 31, 37–54. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R.; Diaco, M.; Marotti de Sciarra, F. Constitutive boundary conditions and paradoxes in nonlocal elastic nanobeams. Int. J. Mech. Sci. 2017, 121, 151–156. [Google Scholar] [CrossRef]
- Koutsoumaris, C.C.; Eptaimeros, K.G.; Zisis, T.; Tsamasphyros, G.J. A straightforward approach to Eringen’s nonlocal elasticity stress model and applications for nanobeams. AIP Conf. Proc. 2016, 1790, 150018. [Google Scholar]
- Ma, H.M.; Gao, X.-L.; Reddy, J.N. A microstructure-dependent Timoshenko beam model based on a modified couple stress theory. J. Mech. Phys. Solids 2008, 56, 3379–3391. [Google Scholar] [CrossRef]
- Gao, X.-L.; Zhou, S.-S. Strain gradient solutions of half-space and half-plane contact problems. Z. Angew. Math. Phys. 2013, 64, 1363–1386. [Google Scholar] [CrossRef]
- Challamel, N.; Reddy, J.N.; Wang, C.M. Eringen′s stress gradient model for bending of nonlocal beams. J. Eng. Mech. 2016, 142, 04016095. [Google Scholar] [CrossRef]
- Apuzzo, A.; Barretta, R.; Fabbrocino, F.; Faghidian, S.A.; Luciano, R.; Marotti de Sciarra, F. Axial and torsional free vibrations of elastic nano-beams by stress-driven two-phase elasticity. J. Appl. Comput. Mech. 2019, 5, 402–413. [Google Scholar]
- Vaccaro, M.S.; Marotti de Sciarra, F.; Barretta, R. On the regularity of curvature fields in stress-driven nonlocal elastic beams. Acta Mech. 2021, 232, 2595–2603. [Google Scholar] [CrossRef]
- Pinnola, F.P.; Vaccaro, M.S.; Barretta, R.; Marotti de Sciarra, F. Finite element method for stress-driven nonlocal beams. Eng. Anal. Bound. Elem. 2022, 134, 22–34. [Google Scholar] [CrossRef]
- Marotti de Sciarra, F.; Barretta, R. A new nonlocal bending model for Euler-Bernoulli nanobeams. Mech. Res. Commun. 2014, 62, 25–30. [Google Scholar] [CrossRef]
- Sae-Long, W.; Limkatanyu, S.; Prachasaree, W.; Rungamornrat, J.; Sukontasukkul, P. A thermodynamics-based nonlocal bar-elastic substrate model with inclusion of surface-energy effect. J. Nanomater. 2020, 2020, 8276745. [Google Scholar] [CrossRef]
- Sae-Long, W.; Limkatanyu, S.; Rungamornrat, J.; Prachasaree, W.; Sukontasukkul, P.; Sedighi, H.M. A rational beam-elastic substrate model with incorporation of beam-bulk nonlocality and surface-free energy. Eur. Phys. J. Plus 2021, 136, 80. [Google Scholar] [CrossRef]
- Gurtin, M.E.; Murdoch, A.I. A continuum theory of elastic material surface. Arch. Ration. Mech. Anal. 1975, 57, 291–323. [Google Scholar] [CrossRef]
- Gurtin, M.E.; Murdoch, A.I. Surface stress in solids. Int. J. Solids Struct. 1978, 14, 431–440. [Google Scholar] [CrossRef]
- He, J.; Lilley, C.M. Surface effect on the elastic behavior of static bending nanowires. Nano Lett. 2008, 8, 1798–1802. [Google Scholar] [CrossRef]
- Gao, X.-L.; Mahmoud, F.F. A new Bernoulli-Euler beam model incorporating microstructure and surface energy effects. Z. Angew. Math. Phys. 2014, 65, 393–404. [Google Scholar] [CrossRef]
- Gao, X.-L. A new Timoshenko beam model incorporating microstructure and surface energy effects. Acta Mech. 2015, 226, 457–474. [Google Scholar] [CrossRef]
- Sourki, R.; Hosseini, S.A. Coupling effects of nonlocal and modified couple stress theories incorporating surface energy on analytical transverse vibration of a weakened nanobeam. Eur. Phys. J. Plus 2017, 132, 184. [Google Scholar] [CrossRef]
- Sapsathiarn, Y.; Rajapakse, R.K.N.D. Mechanistic models for nanobeams with surface stress effects. J. Eng. Mech. 2018, 144, 04018098. [Google Scholar] [CrossRef]
- Yekrangi, A.; Yaghobi, M.; Riazian, M.; Koochi, A. Scale-dependent dynamic behavior of nanowire-based sensor in accelerating field. J. Appl. Comput. Mech. 2019, 5, 486–497. [Google Scholar]
- Sae-Long, W.; Limkatanyu, S.; Sukontasukkul, P.; Damrongwiriyanupap, N.; Rungamornrat, J.; Prachasaree, W. A fourth-order strain gradient bar-substrate model with nonlocal and surface effects for the analysis of nanowires embedded in substrate media. Facta Univ. Ser. Mech. Eng. 2021, 19, 657–680. [Google Scholar]
- Wang, Z.L.; Song, J. Piezoelectric nanogenerators based on zinc oxide nanowire arrays. Science 2006, 312, 242–246. [Google Scholar] [CrossRef]
- Feng, X.L.; He, R.; Yang, P.; Roukes, M.L. Very high frequency silicon nanowire electromechanical resonators. Nano Lett. 2007, 7, 1953–1959. [Google Scholar] [CrossRef] [Green Version]
- Fang, M.; Han, N.; Wang, F.; Yang, Z.; Yip, S.; Dong, G.; Hou, J.J.; Chueh, Y.; Ho, J.C. III–V nanowires: Synthesis, property manipulations, and device applications. J. Nanomater. 2014, 2014, 702859. [Google Scholar] [CrossRef]
- Ambhorkar, P.; Wang, Z.; Ko, H.; Lee, S.; Koo, K.; Kim, K.; Cho, D.D. Nanowire-based biosensors: From growth to applications. Micromachines 2018, 9, 679. [Google Scholar] [CrossRef] [Green Version]
- Sohn, H.; Park, C.; Oh, J.-M.; Kang, S.W.; Kim, M.-J. Silver nanowire networks: Mechano-electric properties and applications. Materials 2019, 12, 2526. [Google Scholar] [CrossRef] [Green Version]
- Ponbunyanon, P.; Limkatanyu, S.; Kaewjuea, W.; Prachasaree, W.; Chub-Uppakarn, T. A novel beam-elastic substrate model with inclusion of nonlocal elasticity and surface energy effects. Arab. J. Sci. Eng. 2016, 41, 4099–4113. [Google Scholar] [CrossRef]
- Zhao, T.; Luo, J.; Xiao, Z. Buckling analysis of a nanowire lying on Winkler–Pasternak elastic foundation. Mech. Adv. Mater. Struct. 2015, 22, 394–401. [Google Scholar] [CrossRef] [Green Version]
- Malekzadeh, P.; Shojaee, M. Surface and nonlocal effects on the nonlinear free vibration of non-uniform nanobeams. Compos. Part B Eng. 2013, 52, 84–92. [Google Scholar] [CrossRef]
- Limkatanyu, S.; Prachasaree, W.; Damrongwiriyanupap, N.; Kwon, M. Exact stiffness matrix for nonlocal bars embedded in elastic foundation media: The virtual-force approach. J. Eng. Math. 2014, 89, 163–176. [Google Scholar] [CrossRef]
- Wolfram, S. Mathematica Reference Guide; Addison-Wesley Publishing Company: Redwood City, CA, USA, 1992. [Google Scholar]
- Altan, B.S.; Aifantis, E.C. On some aspects in the special theory of gradient elasticity. J. Mech. Behav. Mater. 1997, 8, 231–282. [Google Scholar] [CrossRef]
- Argatov, I. From Winkler′s foundation to Popov′s foundation. Facta Univ. Ser. Mech. Eng. 2019, 17, 181–190. [Google Scholar]
- Gülkan, P.; Alemdar, B.N. An exact finite element for a beam on a two-parameter elastic foundation: A revisit. Struct. Eng. Mech. 1999, 7, 259–276. [Google Scholar] [CrossRef]
- Juntarasaid, C.; Pulngern, T.; Chucheepsakul, S. Bending and buckling of nanowires including the effects of surface stress and nonlocal elasticity. Phys. E Low-Dimens. Syst. Nanostruct. 2012, 46, 68–76. [Google Scholar] [CrossRef]
- Yang, Y.; Lim, C.W. Non-classical stiffness strengthening size effects for free vibration of a nonlocal nanostructure. Int. J. Mech. Sci. 2012, 54, 57–68. [Google Scholar] [CrossRef]
- Liew, K.M.; He, X.Q.; Kitipornchai, S. Predicting nanovibration of multi-layer graphene sheets embedded in an elastic matrix. Acta Mater. 2006, 54, 4229–4236. [Google Scholar] [CrossRef]
- Buachart, C.; Hansapinyo, C.; Kanok-Nukulchai, W. Analysis of axial loaded pile in multilayered soil using nodal exact finite element model. Int. J. GEOMATE 2018, 14, 1–7. [Google Scholar] [CrossRef]
- Li, X.-F.; Wang, B.-L.; Lee, K.Y. Size effects of the bending stiffness of nanowires. J. Appl. Phys. 2009, 105, 074306. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Limkatanyu, S.; Sae-Long, W.; Mohammad-Sedighi, H.; Rungamornrat, J.; Sukontasukkul, P.; Prachasaree, W.; Imjai, T. Strain-Gradient Bar-Elastic Substrate Model with Surface-Energy Effect: Virtual-Force Approach. Nanomaterials 2022, 12, 375. https://doi.org/10.3390/nano12030375
Limkatanyu S, Sae-Long W, Mohammad-Sedighi H, Rungamornrat J, Sukontasukkul P, Prachasaree W, Imjai T. Strain-Gradient Bar-Elastic Substrate Model with Surface-Energy Effect: Virtual-Force Approach. Nanomaterials. 2022; 12(3):375. https://doi.org/10.3390/nano12030375
Chicago/Turabian StyleLimkatanyu, Suchart, Worathep Sae-Long, Hamid Mohammad-Sedighi, Jaroon Rungamornrat, Piti Sukontasukkul, Woraphot Prachasaree, and Thanongsak Imjai. 2022. "Strain-Gradient Bar-Elastic Substrate Model with Surface-Energy Effect: Virtual-Force Approach" Nanomaterials 12, no. 3: 375. https://doi.org/10.3390/nano12030375
APA StyleLimkatanyu, S., Sae-Long, W., Mohammad-Sedighi, H., Rungamornrat, J., Sukontasukkul, P., Prachasaree, W., & Imjai, T. (2022). Strain-Gradient Bar-Elastic Substrate Model with Surface-Energy Effect: Virtual-Force Approach. Nanomaterials, 12(3), 375. https://doi.org/10.3390/nano12030375