Developing a Quantifying Device for Soft Tissue Material Properties around Lumbar Spines




Abstract
:1. Introduction
2. Materials and Methods
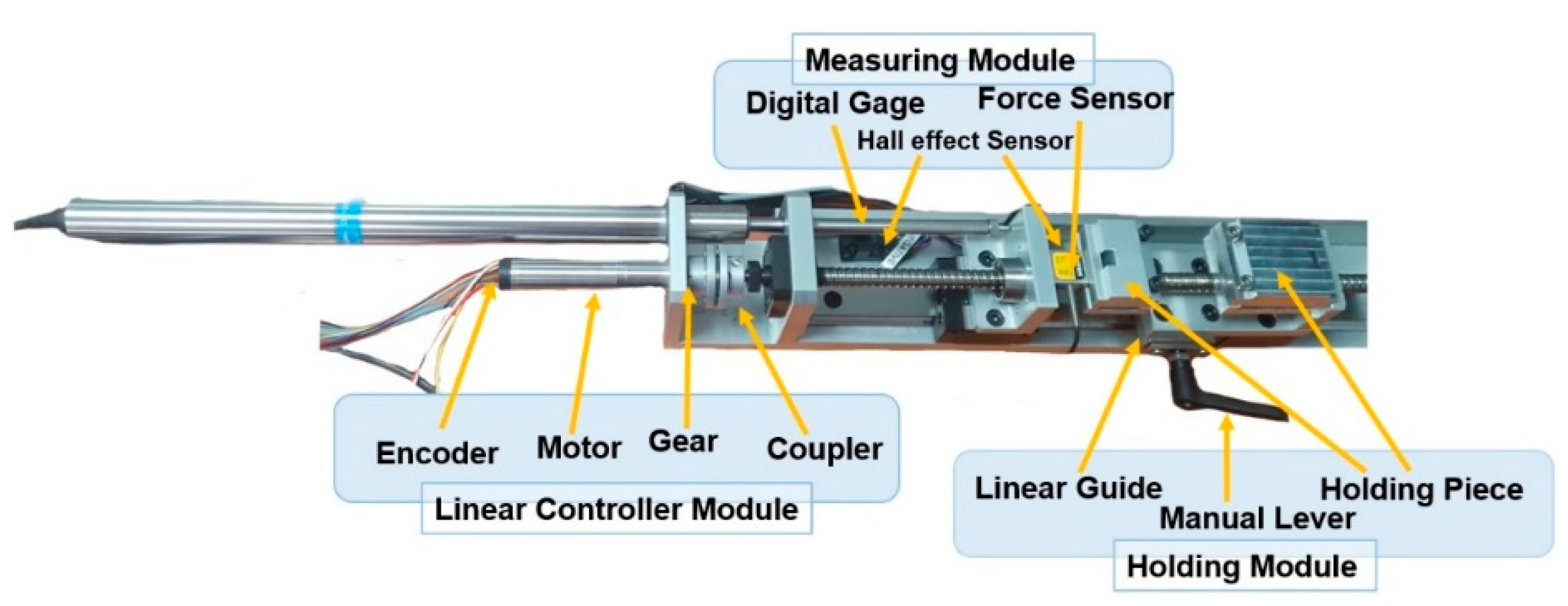
2.1. A quantifying Device for Soft Tissue Material Properties
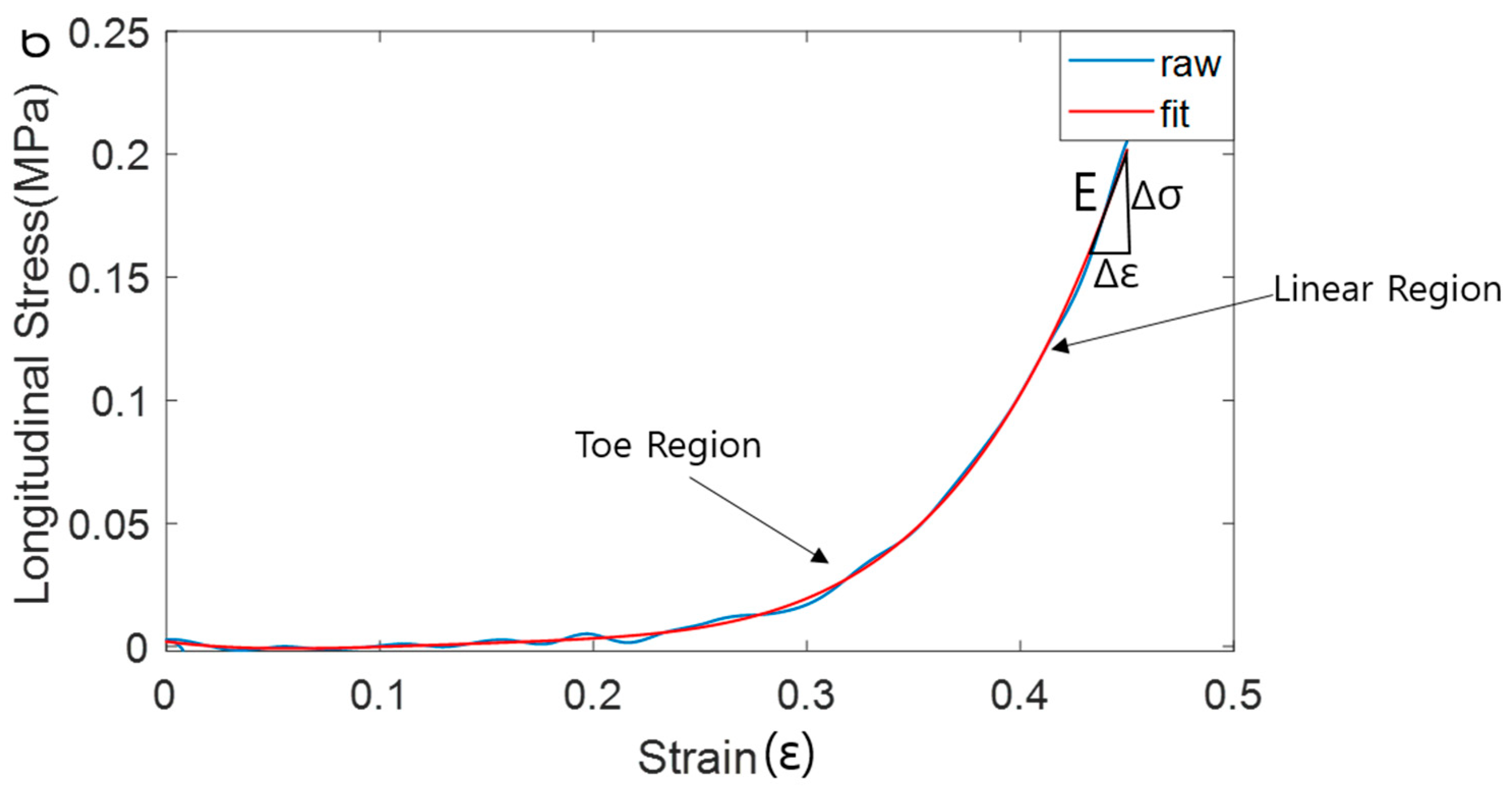
2.2. Quantifying Methods for Soft Tissue Material Properties Using a Strain vs. Stress Curve
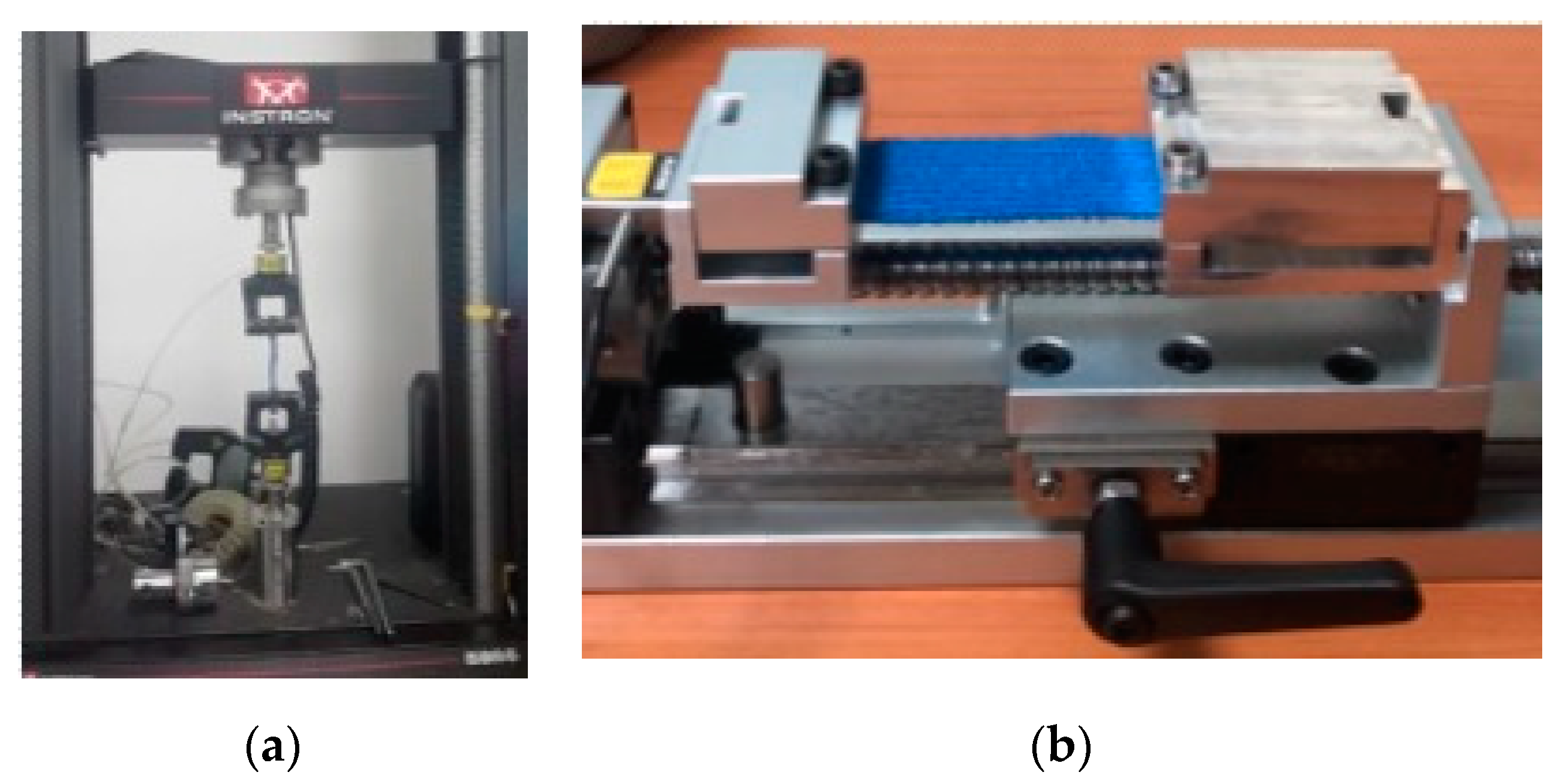
2.3. Quantification of Young’s Modulus of Soft Tissues Using a Cadaver
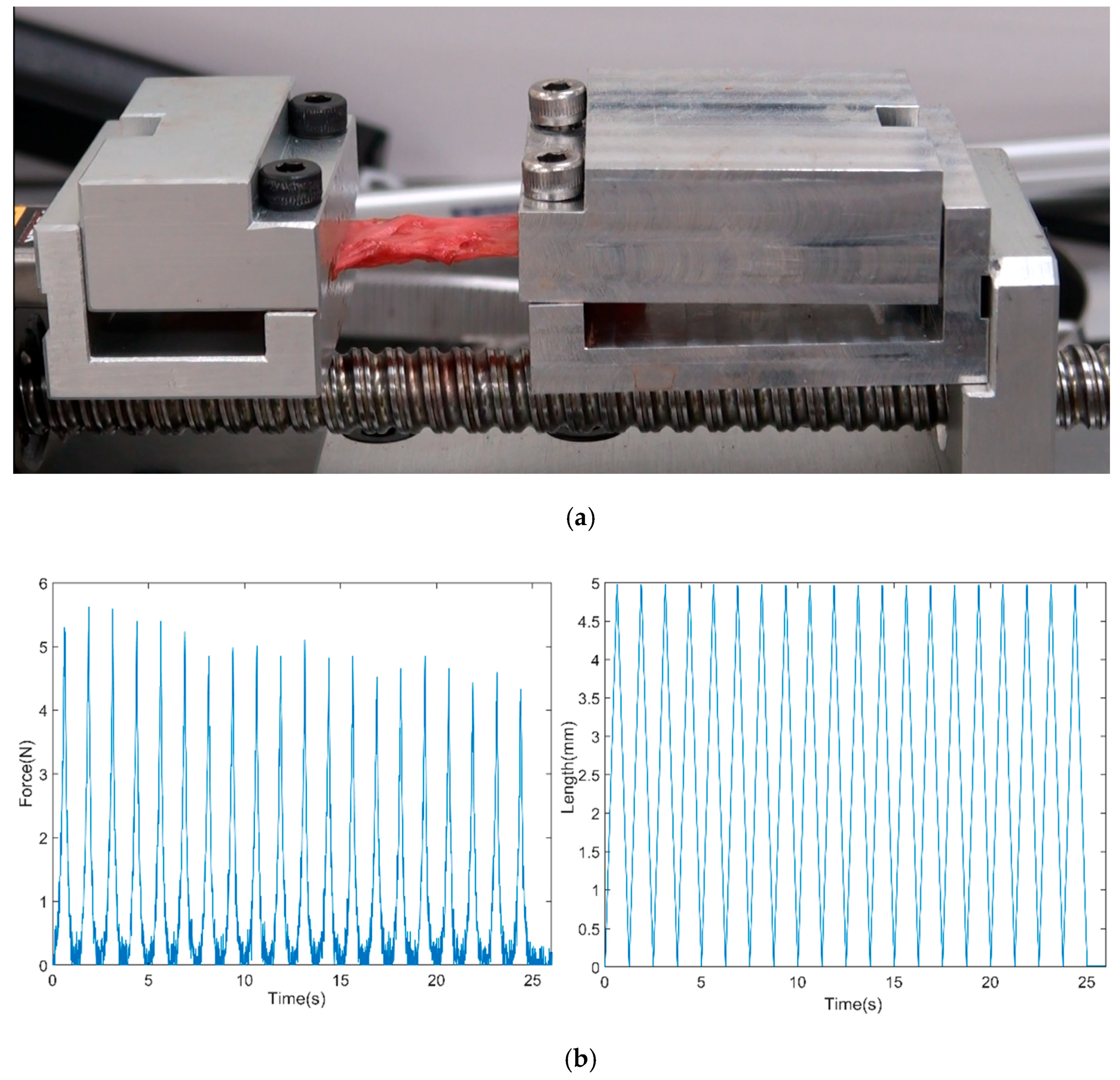
2.4. Feasibility Test
2.5. Statistics
3. Results
3.1. Controlling the Speeds of the Quantifying Devices and Allowing a Different Initial Length Setup
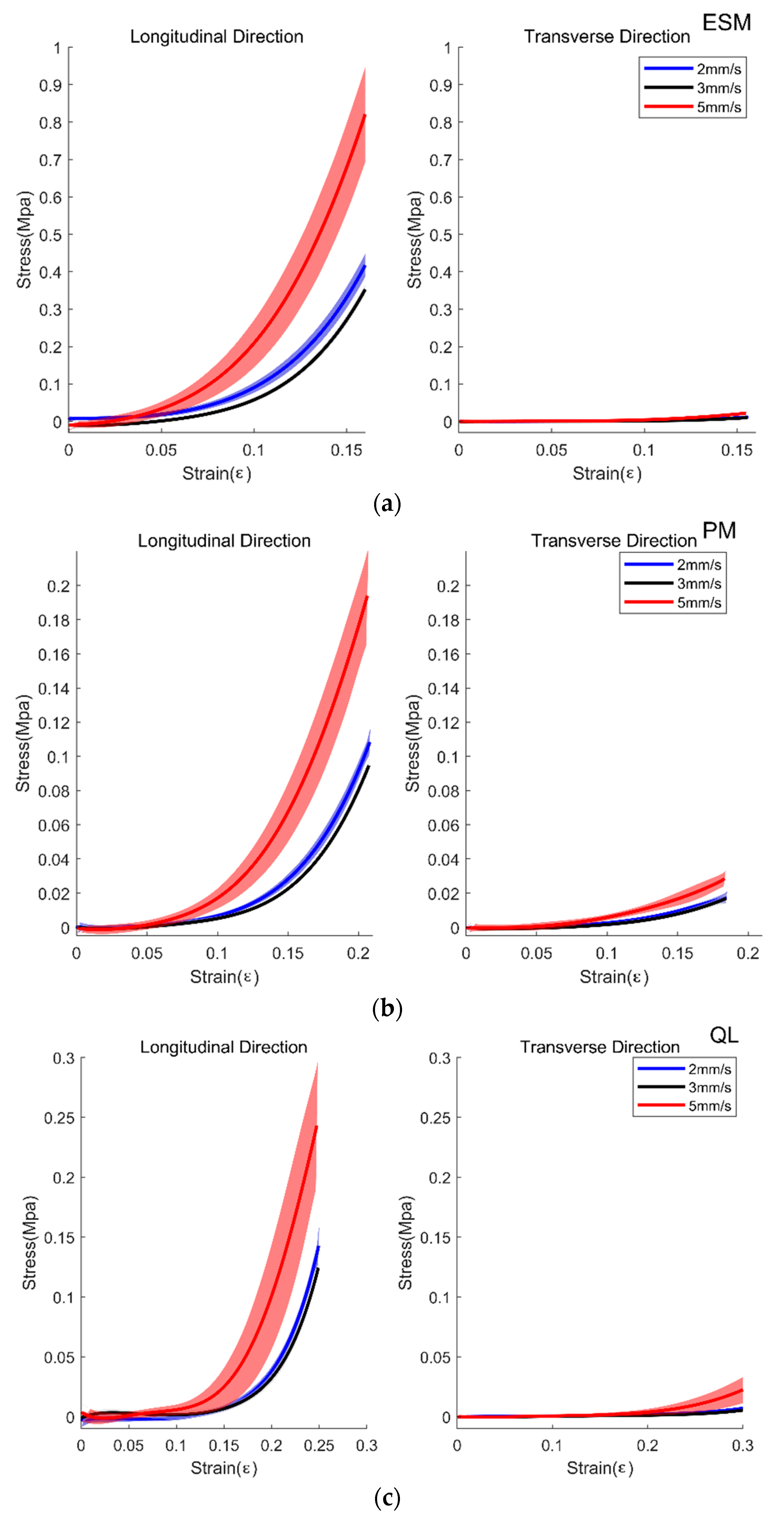
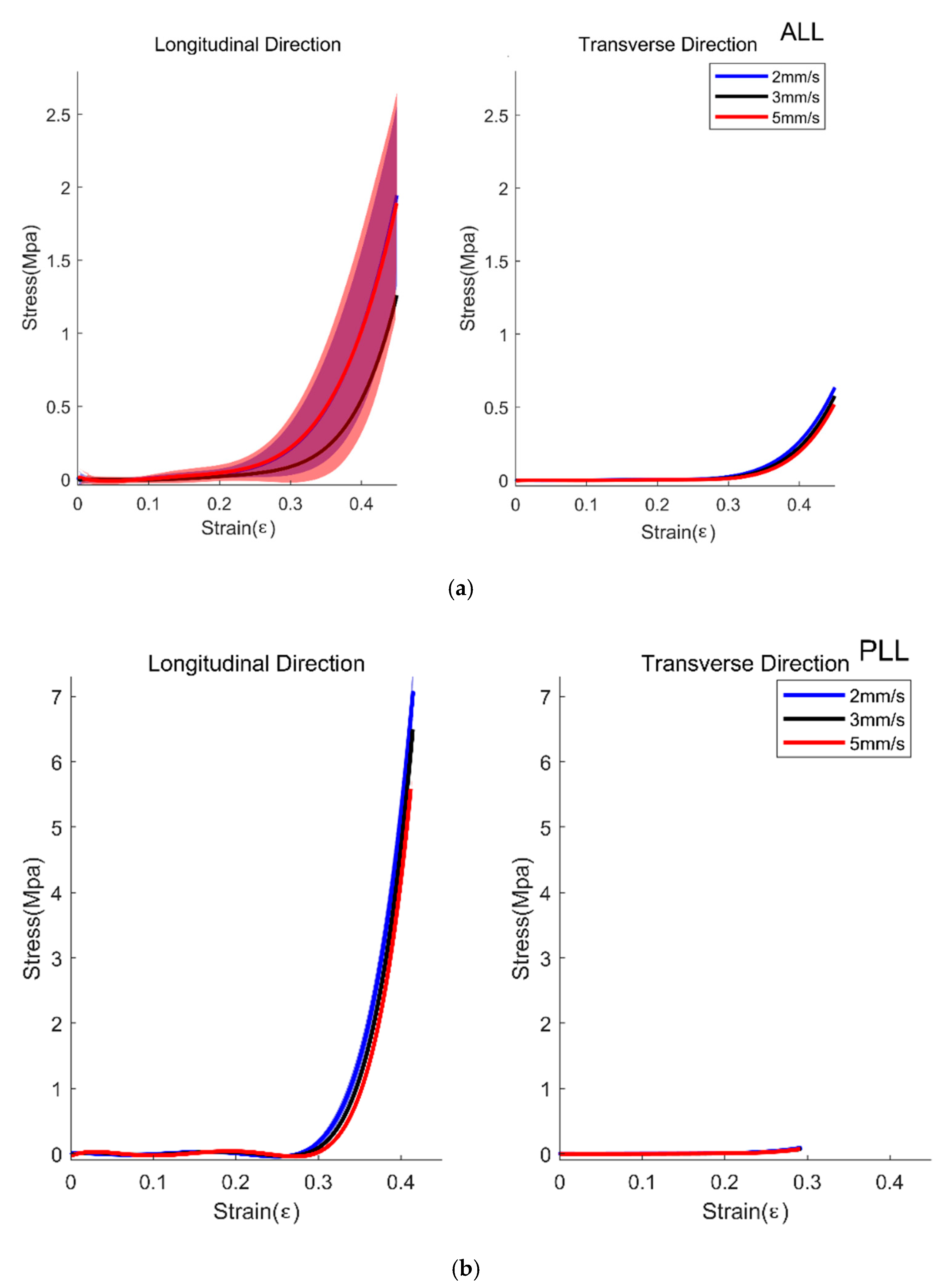
3.2. Strain and Stress Curve of the Specimens from the Cadaver and Young’s Modulus of the Materials
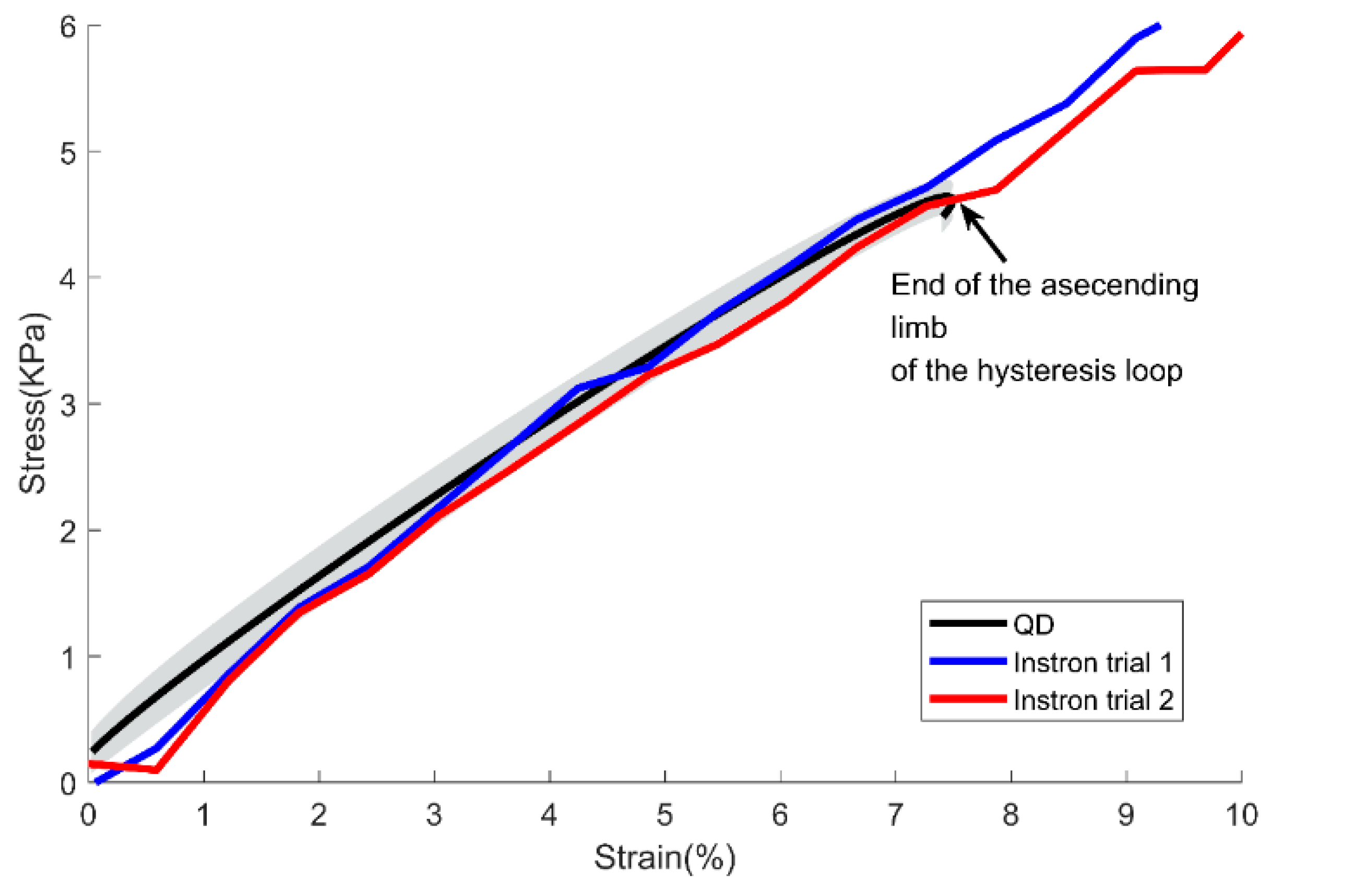
3.3. Feasibility Test
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fung, Y.C. Biomechanics: Mechanical Properties of Living Tissues, 2nd ed.; Springer: New York, NY, USA, 1993. [Google Scholar]
- Van Loocke, M.; Lyons, C.G.; Simms, C.K. Viscoelastic properties of passive skeletal muscle in compression: Stress-relaxation behaviour and constitutive modelling. J. Biomech. 2008, 41, 1555–1566. [Google Scholar] [CrossRef] [PubMed]
- Audette, M.A.; Ferrie, F.P.; Peters, T.M. An algorithmic overview of surface registration techniques for medical imaging. Med. Image Anal. 2000, 4, 201–217. [Google Scholar] [CrossRef]
- Kochanski, R.B.; Lombardi, J.M.; Laratta, J.L.; Lehman, R.A.; O’Toole, J.E. Image-Guided Navigation and Robotics in Spine Surgery. Neurosurgery 2019, 84, 1179–1189. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yi, B.J. An Assistive Image-Guided Surgical Robot System Using O-Arm Fluoroscopy for Pedicle Screw Insertion: Preliminary and Cadaveric Study. Neurosurgery 2010, 67, 1757–1767, Erratum in 2011, 68. [Google Scholar] [CrossRef]
- Holly, L.T.; Bloch, O.; Johnson, J.P. Evaluation of registration techniques for spinal image guidance. J. Neurosurg. Spine 2006, 4, 323–328. [Google Scholar] [CrossRef] [PubMed]
- Wyawahare, M.; Patil, P.; Abhyankar, H. Image Registration Techniques: An overview. Int. J. Signal Process. Image Process. Pattern Recognit. 2009, 2, 11–28. [Google Scholar]
- Tjardes, T.; Shafizadeh, S.; Rixen, D.; Paffrath, T.; Bouillon, B.; Steinhausen, E.S.; Baethis, H. Image-guided spine surgery: State of the art and future directions. Eur. Spine J. 2010, 19, 25–45. [Google Scholar] [CrossRef] [Green Version]
- Oppenheimer, J.H.; DeCastro, I.; McDonnell, D.E. Minimally invasive spine technology and minimally invasive spine surgery: A historical review. Neurosurg. Focus 2009, 27, E9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Egorov, V.; Tsyuryupa, S.; Kanilo, S.; Kogit, M.; Sarvazyan, A. Soft tissue elastometer. Med. Eng. Phys. 2008, 30, 206–212. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Morrow, D.A.; Donahue, T.L.H.; Odegard, G.M.; Kaufman, K.R. Transversely isotropic tensile material properties of skeletal muscle tissue. J. Mech. Behav. Biomed. Mater. 2010, 3, 124–129. [Google Scholar] [CrossRef] [Green Version]
- Murphy, J.G. Transversely isotropic biological, soft tissue must be modelled using both anisotropic invariants. Eur. J. Mech. A/Solids 2013, 42, 90–96. [Google Scholar] [CrossRef]
- Somovilla-Gomez, F.; Lostado-Lorza, R.; Corral-Bobadilla, M.; Escribano-Garcia, R. Improvement in determining the risk of damage to the human lumbar functional spinal unit considering age, height, weight and sex using a combination of FEM and RSM. Biomech. Model. Mechanobiol. 2020, 19, 351–387. [Google Scholar] [CrossRef] [PubMed]
- Przybylski, G.J.; Carlin, G.J.; Patel, P.R.; Woo, S.L.Y. Human anterior and posterior cervical longitudinal ligaments possess similar tensile properties. J. Orthop. Res. 1996, 14, 1005–1008. [Google Scholar] [CrossRef] [PubMed]
- Lima, K.M.M.; Júnior, J.F.S.C.; Pereira, W.C.D.A.; de Oliveira, L.F. Assessment of the mechanical properties of the muscle-tendon unit by supersonic shear wave imaging elastography: A review. Ultrasonography 2018, 37, 3–15. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.N.; Li, Y.P.; Liu, C.L.; Zhang, Z.J. Assessing the elastic properties of skeletal muscle and tendon using shearwave ultrasound elastography and MyotonPRO. Sci. Rep. 2018, 8, 17064. [Google Scholar] [CrossRef]
- Dieterich, A.V.; Andrade, R.J.; Le Sant, G.; Falla, D.; Petzke, F.; Hug, F.; Nordez, A. Shear wave elastography reveals different degrees of passive and active stiffness of the neck extensor muscles. Eur. J. Appl. Physiol. 2017, 117, 171–178. [Google Scholar] [CrossRef]
- Alis, D.; Durmaz, E.S.M.; Alis, C.; Erol, B.C.; Okur, B.; Kizilkilic, O.; Mihmanli, I. Shear Wave Elastography of the Lumbar Multifidus Muscle in Patients With Unilateral Lumbar Disk Herniation. J. Ultras. Med. 2019, 38, 1695–1703. [Google Scholar] [CrossRef]
- Chan, S.T.; Fung, P.K.; Ng, N.Y.; Ngan, T.L.; Chong, M.Y.; Tang, C.N.; He, J.F.; Zheng, Y.P. Dynamic changes of elasticity, cross-sectional area, and fat infiltration of multifidus at different postures in men with chronic low back pain. Spine J. 2012, 12, 381–388. [Google Scholar] [CrossRef] [PubMed]
- Mathur, A.B.; Collinsworth, A.M.; Reichert, W.M.; Kraus, W.E.; Truskey, G.A. Endothelial, cardiac muscle and skeletal muscle exhibit different viscous and elastic properties as determined by atomic force microscopy. J. Biomech. 2001, 34, 1545–1553. [Google Scholar] [CrossRef]
- Shan, X.Y.; Otsuka, S.; Yakura, T.; Naito, M.; Nakano, T.; Kawakami, Y. Morphological and mechanical properties of the human triceps surae aponeuroses taken from elderly cadavers: Implications for muscle-tendon interactions. PLoS ONE 2019, 14, e0211485. [Google Scholar] [CrossRef]
- Kang, I.; Choi, M.; Lee, D.; Noh, G. Effect of Passive Support of the Spinal Muscles on the Biomechanics of a Lumbar Finite Element Model. Appl. Sci. 2020, 10, 6278. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Direction | ||||||
|---|---|---|---|---|---|---|
| Specimen | Longitudinal (mm) | Transverse (mm) | ||||
| L | W | T | L | W | T | |
| Erector Spinae Muscle (ESM) | 30 | 3 | 4 | 32 | 20 | 8 |
| Quadratus Lumborum (QL) | 20 | 3 | 8 | 12 | 15 | 6 |
| Psoas Major (PM) | 24 | 9 | 5 | 27 | 16 | 4 |
| Anterior Longitudinal Ligament (ALL) | 11 | 2 | 2 | 11 | 8 | 4 |
| Posterior Longitudinal Ligament (PLL) | 12 | 7 | 3 | 17 | 9 | 4 |
| Specimen | 2 mm/s | 3 mm/s | 5 mm/s |
|---|---|---|---|
| Longitudinal Direction (Mpa) | |||
| Erector Spinae Muscle | 10.57 (1.52) | 10.00 (1.64) | 15.84 (2.71) *,+ |
| Quadratus Lumborum | 3.45 (0.61) | 2.93 (0.83) | 3.72 (0.89) |
| Psoas Major | 2.19 (0.26) | 2.04 (0.32) | 2.87 (0.59) *,+ |
| Anterior Longitudinal Ligament | 23.83 (4.95) | 20.28 (2.78) * | 21.66 (5.17) |
| Posterior Longitudinal Ligament | 141.94 (2.68) | 138.23 (2.27) * | 126.28 (2.57) *,+ |
| Transverse Direction (Mpa) | |||
| Erector Spinae Muscle | 0.32 (0.12) | 0.33 (0.14) | 0.48 (0.20) * |
| Quadratus Lumborum | 0.61 (0.07) | 0.56 (0.11) | 0.93(0.19) *,+ |
| Psoas Major | 0.32 (0.22) | 0.40 (0.26) | 0.55 (0.30) * |
| Anterior Longitudinal Ligament | 10.46 (0.34) | 9.95 (0.34) * | 9.06 (0.42) *,+ |
| Posterior Longitudinal Ligament | 2.10 (0.25) | 1.78 (0.45) | 1.88 (0.47) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.J.; Cho, Y.-E.; Kim, K.-H.; Lee, D. Developing a Quantifying Device for Soft Tissue Material Properties around Lumbar Spines. Biosensors 2021, 11, 67. https://doi.org/10.3390/bios11030067
Lee SJ, Cho Y-E, Kim K-H, Lee D. Developing a Quantifying Device for Soft Tissue Material Properties around Lumbar Spines. Biosensors. 2021; 11(3):67. https://doi.org/10.3390/bios11030067
Chicago/Turabian StyleLee, Song Joo, Yong-Eun Cho, Kyung-Hyun Kim, and Deukhee Lee. 2021. "Developing a Quantifying Device for Soft Tissue Material Properties around Lumbar Spines" Biosensors 11, no. 3: 67. https://doi.org/10.3390/bios11030067
APA StyleLee, S. J., Cho, Y. -E., Kim, K. -H., & Lee, D. (2021). Developing a Quantifying Device for Soft Tissue Material Properties around Lumbar Spines. Biosensors, 11(3), 67. https://doi.org/10.3390/bios11030067