Nanoscale Biosensors Based on Self-Propelled Objects

Abstract
:1. Introduction
2. Moving Biosensor Design: Materials, Propulsion and Transduction Mechanisms
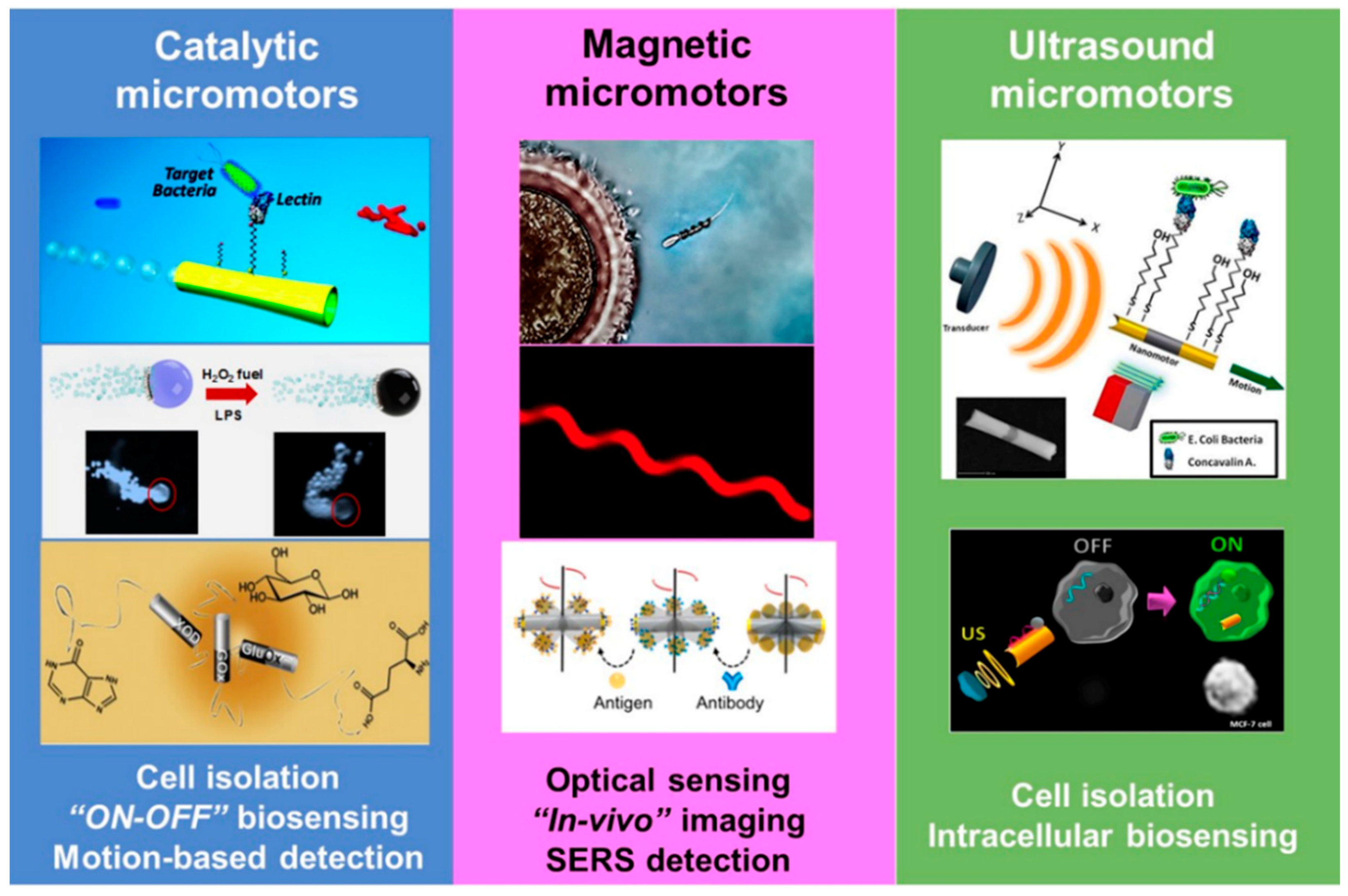
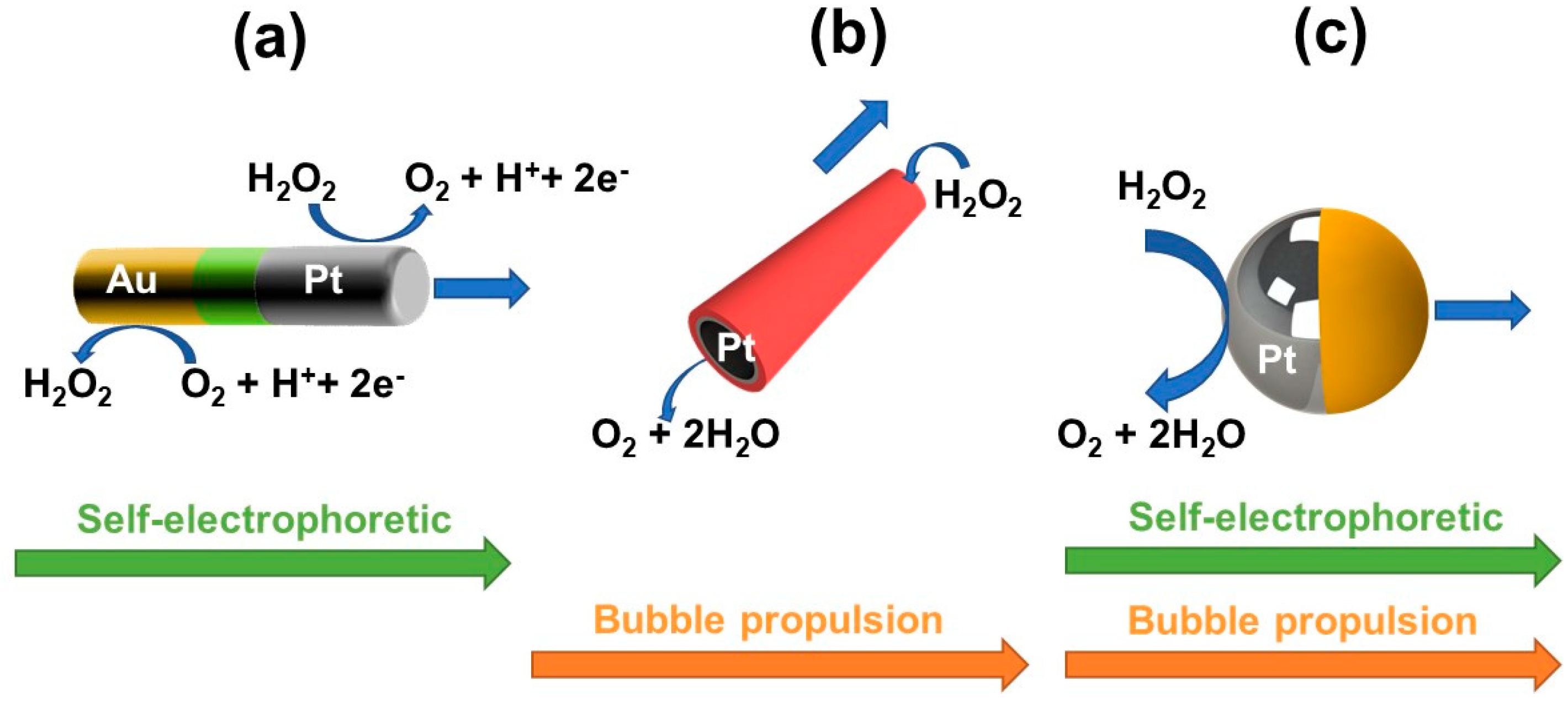
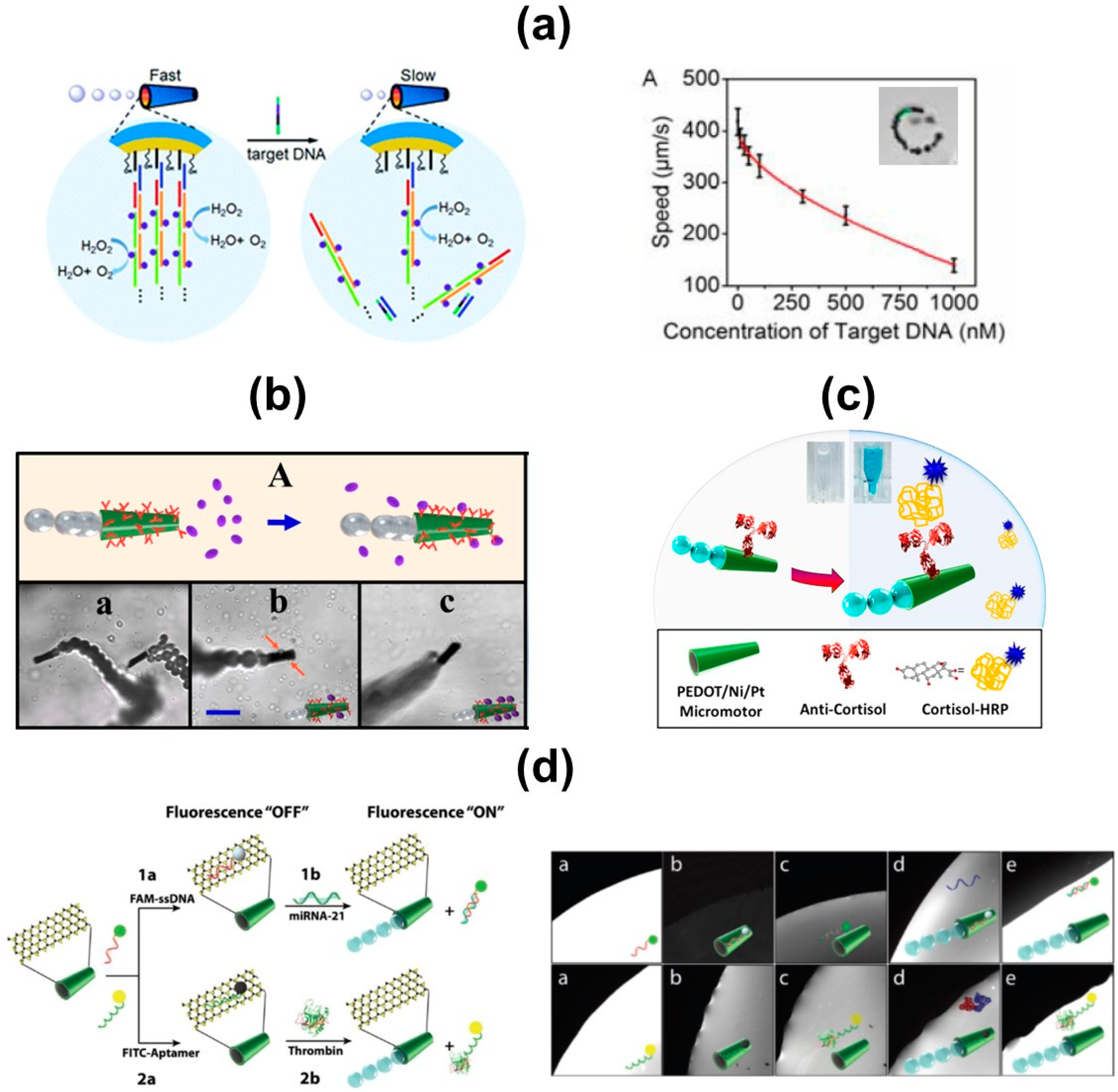
2.1. Catalytic Micromotors
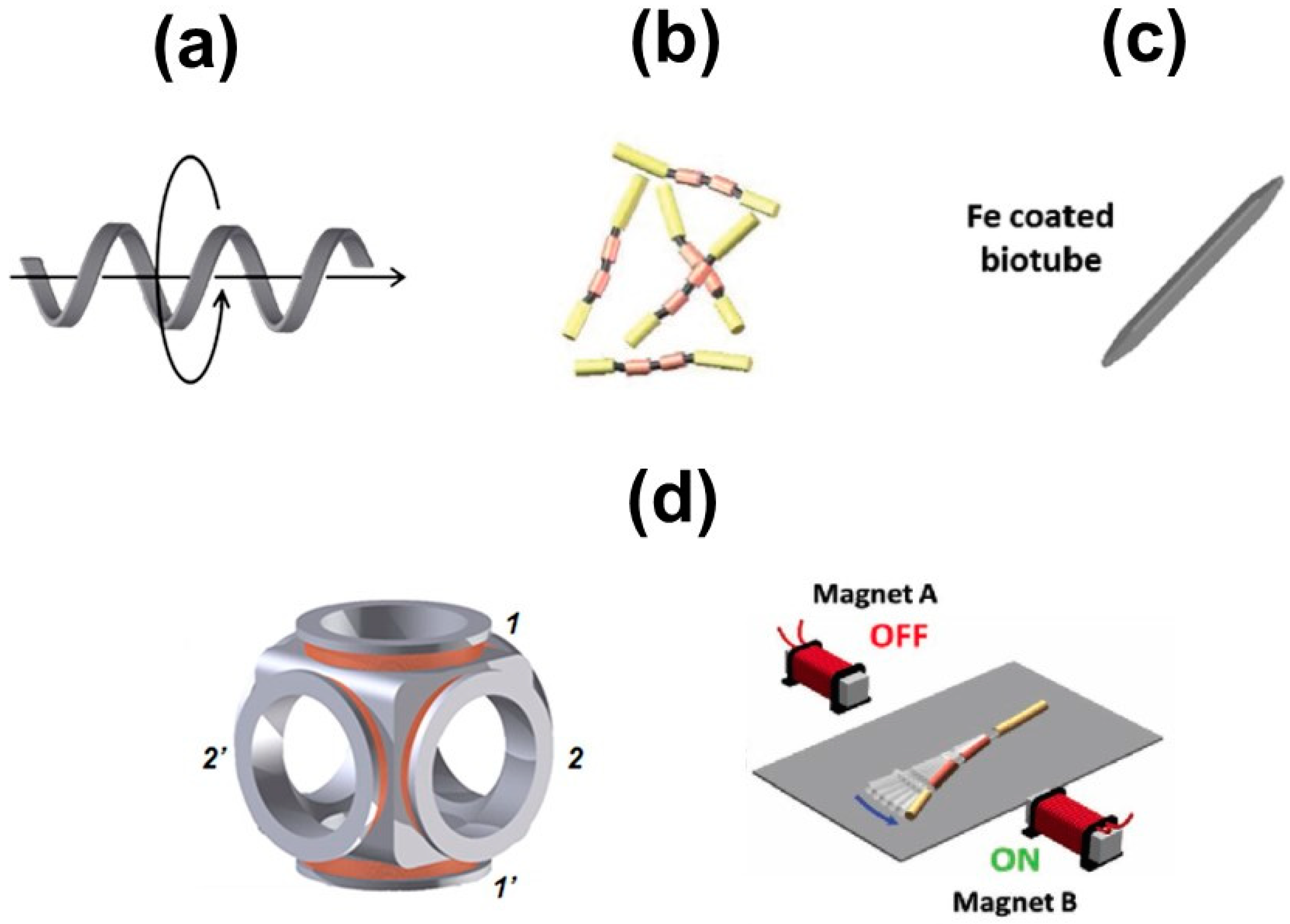
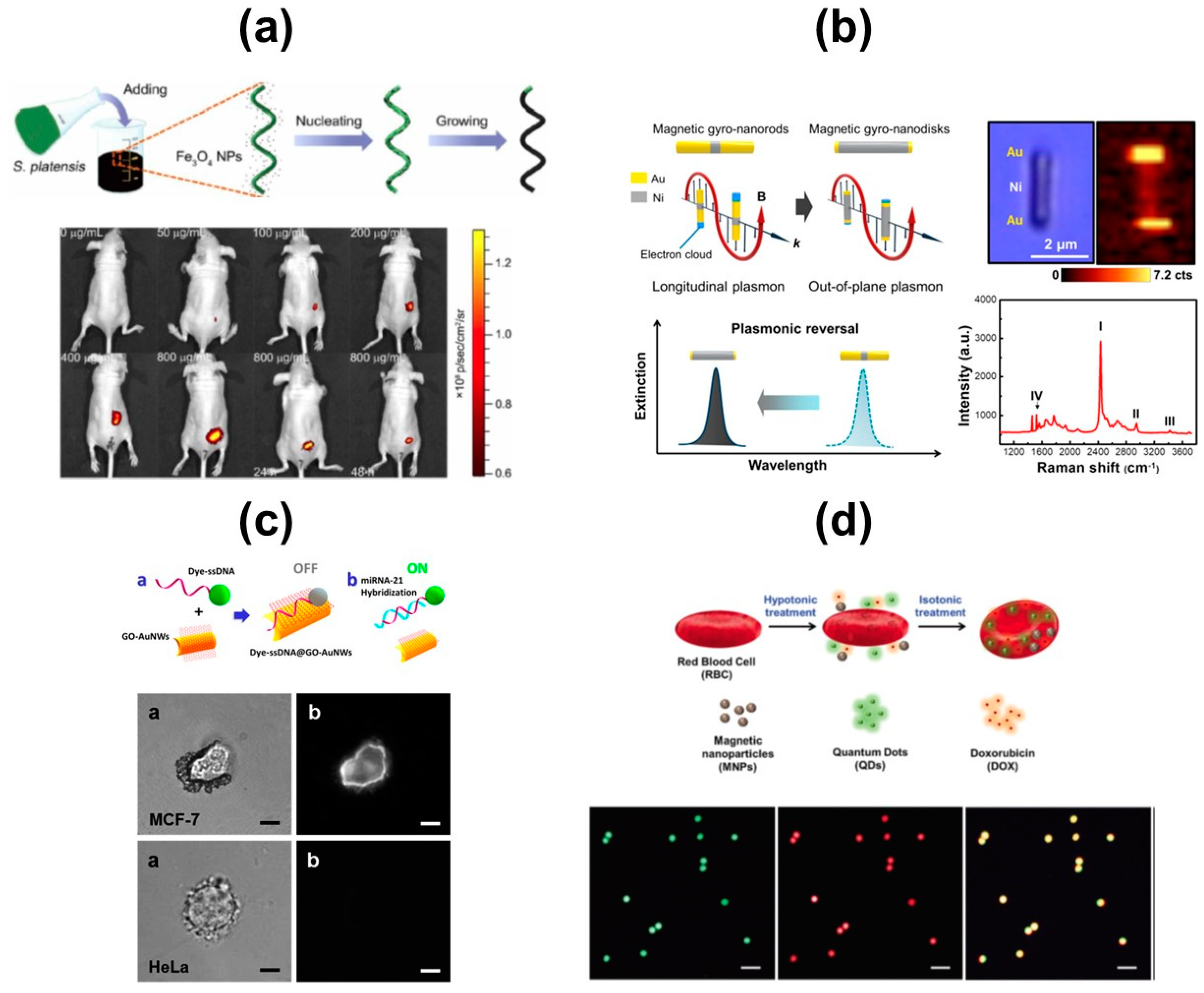
2.2. Magnetic Micromotors
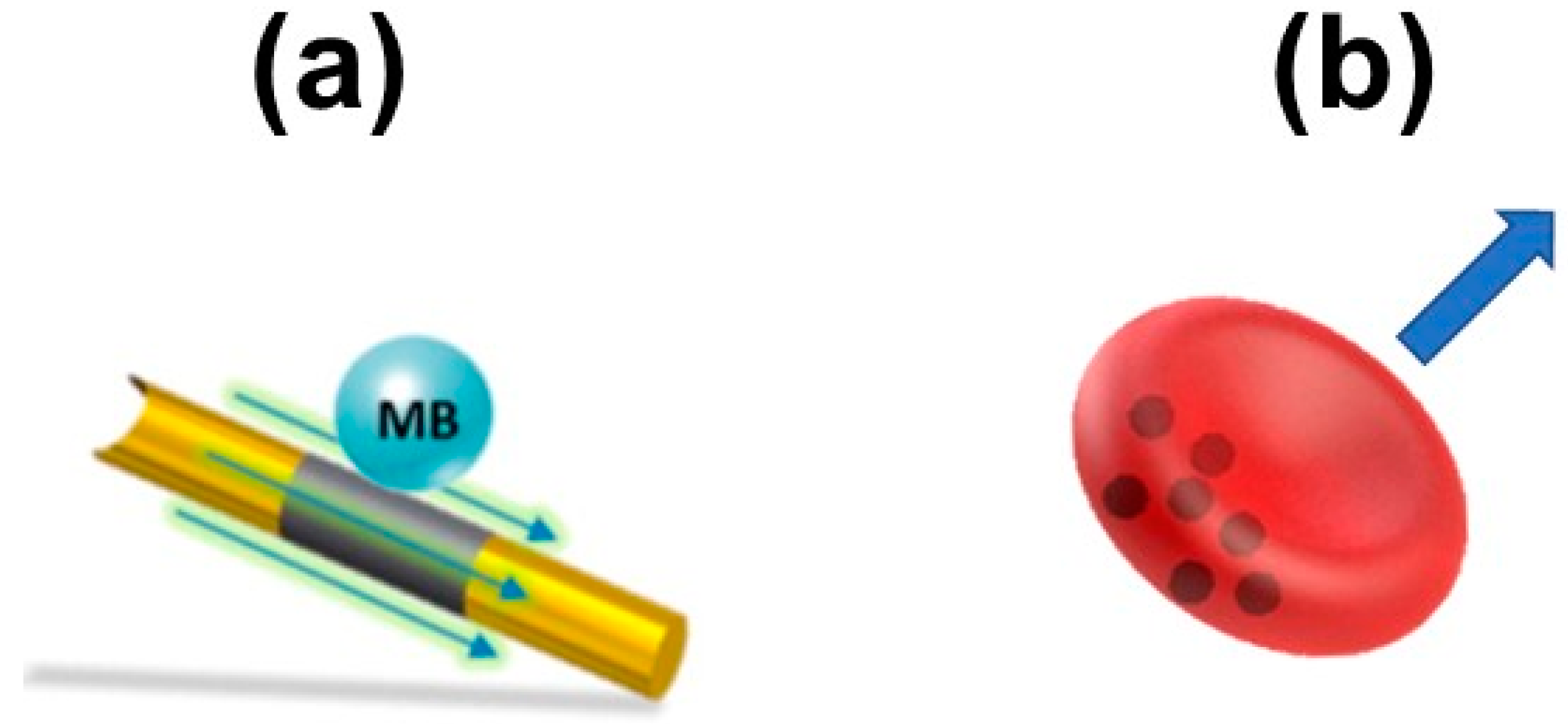
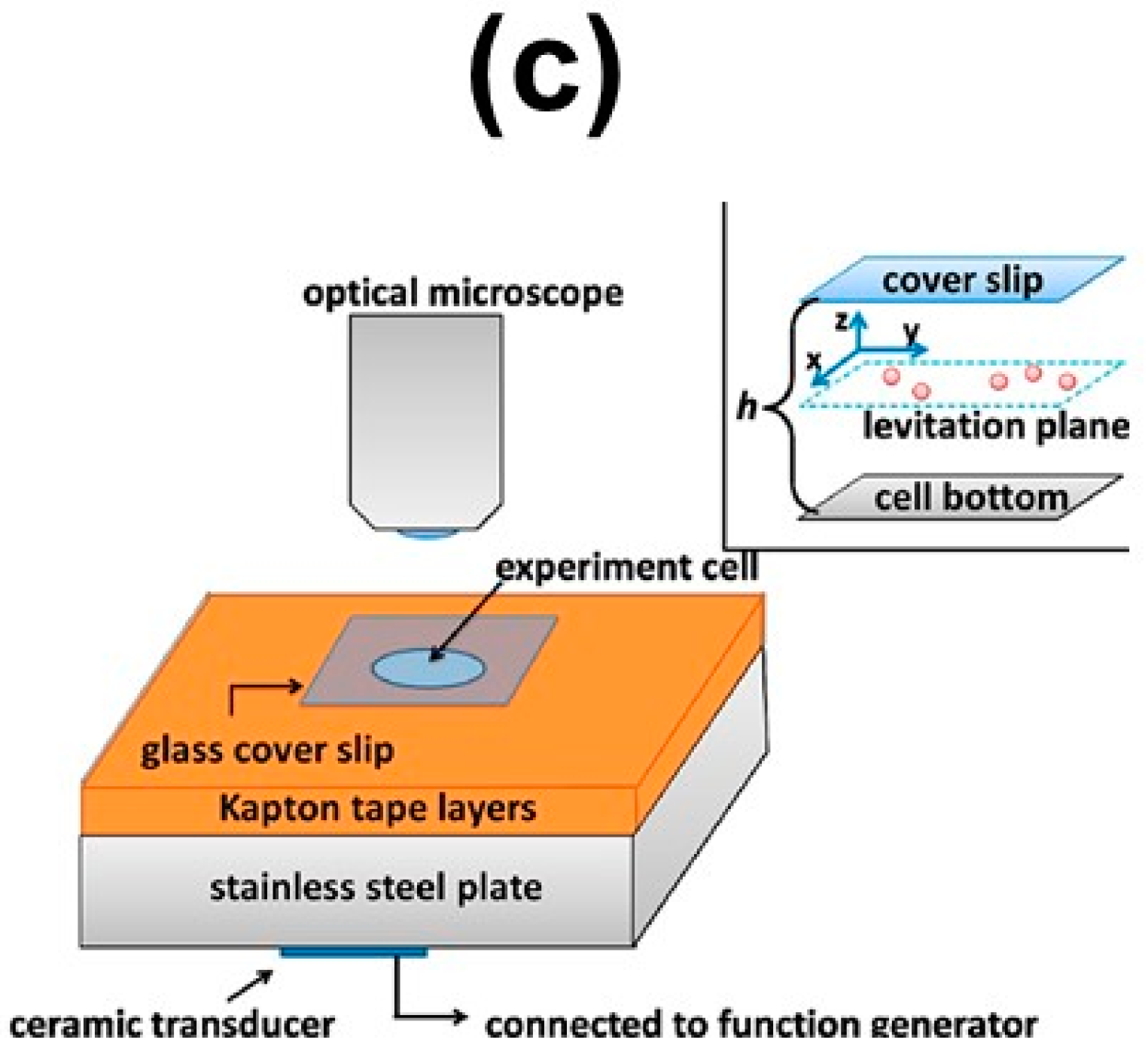
2.3. Ultrasounds Micromotors
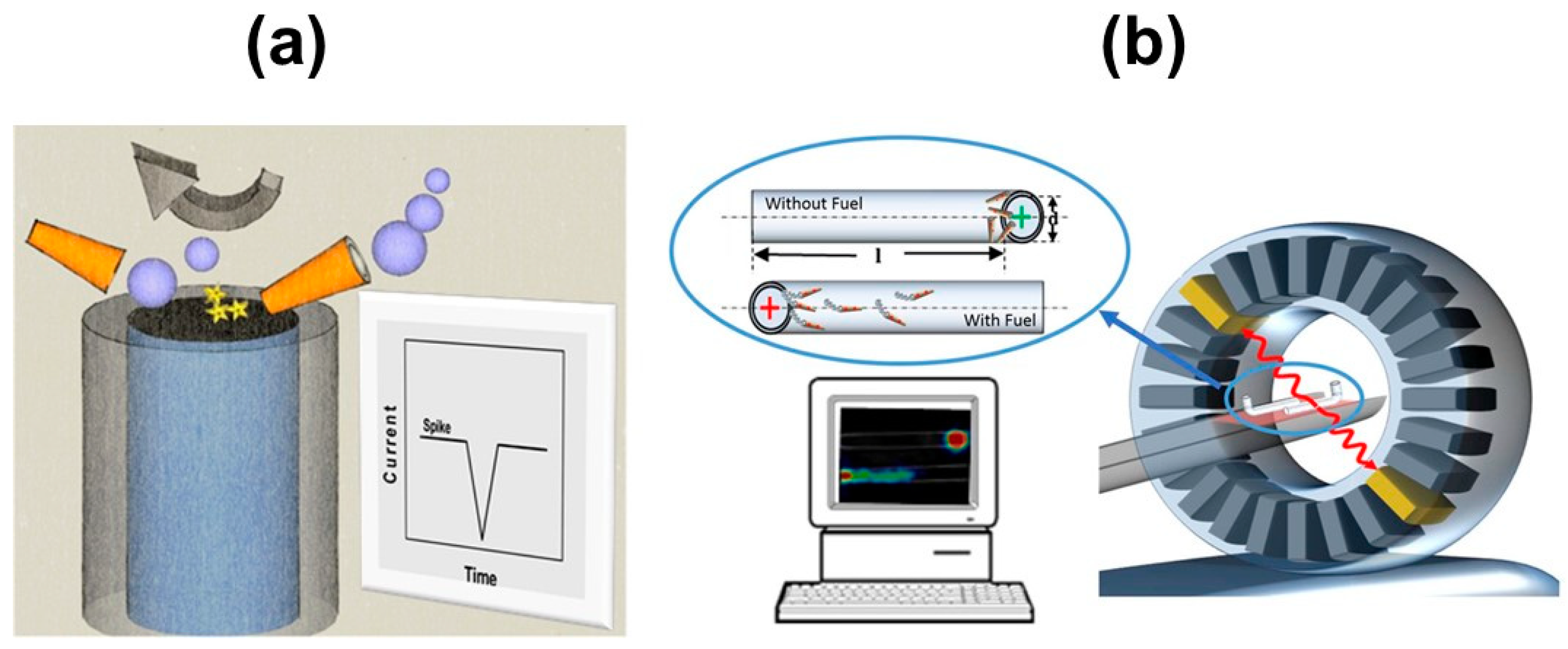
2.4. Transduction Mechanisms
3. In Vitro Biosensing
4. In Vivo Biosensing
5. Conclusions and Future Directions
Acknowledgments
Conflicts of Interest
References
- Clark, L.C.; Lyons, C. Electrode systems for continuous monitoring in cardiovascular surgery. Ann. N. Y. Acad. Sci. 1962, 102, 29–45. [Google Scholar] [CrossRef] [PubMed]
- Gooding, J.J. Nanoscale biosensors: Significant advantages over larger devices? Small 2006, 2, 313–315. [Google Scholar] [CrossRef] [PubMed]
- Soleymani, L.; Li, F. Mechanistic challenges and advantages of biosensor miniaturization into the nanoscale. ACS Sens. 2017, 2, 458–467. [Google Scholar] [CrossRef] [PubMed]
- Paxton, W.F.; Kistler, K.C.; Olmeda, C.C.; Sen, A.; St Angelo, S.K.; Cao, Y.; Mallouk, T.E.; Lammert, P.E.; Crespi, V.H. Catalytic nanomotors: Autonomous movement of striped nanorods. J. Am. Chem. Soc. 2004, 126, 13424–13431. [Google Scholar] [CrossRef] [PubMed]
- Ozin, G.A.; Manners, I.; Fournier-Bidoz, S.; Arsenault, A. Dream nanomachines. Adv. Mater. 2005, 17, 3011–3018. [Google Scholar] [CrossRef]
- Pantarotto, D.; Browne, W.R.; Feringa, B.L. Autonomous propulsion of carbon nanotubes powered by a multienzyme ensemble. Chem. Commun. 2008, 1533–1535. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, W.; Sattayasamitsathit, S.; Orozco, J.; Wang, J. Highly efficient catalytic microengines: Template electrosynthesis of polyaniline/platinum microtubes. J. Am. Chem. Soc. 2011, 133, 11862–11864. [Google Scholar] [CrossRef] [PubMed]
- Mei, Y.; Solovev, A.A.; Sanchez, S.; Schmidt, O.G. Rolled-up nanotech on polymers: From basic perception to self-propelled catalytic microengines. Chem. Soc. Rev. 2011, 40, 2109–2119. [Google Scholar] [CrossRef] [PubMed]
- Wang, J. Nanomachines: Fundamentals and Applications; Wiley VCH: Weinheim, Germany, 2013. [Google Scholar]
- Karshalev, E.; Esteban-Fernandez de Avila, B.; Wang, J. Micromotors for “Chemistry-on-the-Fly”. J. Am. Chem. Soc. 2018, 140, 3810–3820. [Google Scholar] [CrossRef] [PubMed]
- Campuzano, S.; Esteban-Fernandez de Avila, B.; Yanez-Sedeño, P.; Pingarron, J.M.; Wang, J. Nano/microvehicles for efficient delivery and (bio)sensing at the cellular level. Chem. Sci. 2017, 8, 6750–6763. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, K.; Guo, J.; Liang, Z.; Fan, D. Artificial micro/nanomachines for bioapplications: Biochemical delivery and diagnostic sensing. Adv. Funct. Mater. 2018, 28, 1705867. [Google Scholar] [CrossRef]
- Wang, J. Self-propelled affinity biosensors: Moving the receptor around the sample. Biosens. Bioelectron. 2016, 76, 234–242. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, W.; de Ávila, B.E.-F.; Zhang, L.; Wang, J. Targeting and isolation of cancer cells using micro/nanomotors. Adv. Drug Deliv. Rev. 2018, 125, 94–101. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Balasubramanian, S.; Kagan, D.; Manesh, K.M.; Campuzano, S.; Wang, J. Motion-based DNA detection using catalytic nanomotors. Nat. Commun. 2010, 1, 36. [Google Scholar] [CrossRef] [PubMed]
- Bunea, A.I.; Pavel, I.A.; David, S.; Gaspar, S. Sensing based on the motion of enzyme-modified nanorods. Biosens. Bioelectron. 2015, 67, 42–48. [Google Scholar] [CrossRef] [PubMed]
- Van Nguyen, K.; Minteer, S.D. DNA-functionalized Pt nanoparticles as catalysts for chemically powered micromotors: Toward signal-on motion-based DNA biosensor. Chem. Commun. 2015, 51, 4782–4784. [Google Scholar] [CrossRef] [PubMed]
- Fu, S.; Zhang, X.; Xie, Y.; Wu, J.; Ju, H. An efficient enzyme-powered micromotor device fabricated by cyclic alternate hybridization assembly for DNA detection. Nanoscale 2017, 9, 9026–9033. [Google Scholar] [CrossRef] [PubMed]
- Balasubramanian, S.; Kagan, D.; Hu, C.J.; Campuzano, S.; Lobo-Castañon, M.J.; Lim, N.; Kang, D.Y.; Zimmerman, M.; Zhang, L.; Wang, J. Micromachine-enabled capture and isolation of cancer cells in complex media. Angew. Chem. Int. Ed. 2011, 50, 4161–4164. [Google Scholar] [CrossRef] [PubMed]
- Yu, X.; Li, Y.; Wu, J.; Ju, H. Motor-based autonomous microsensor for motion and counting immunoassay of cancer biomarker. Anal. Chem. 2014, 86, 4501–4507. [Google Scholar] [CrossRef] [PubMed]
- Kuralay, F.; Sattayasamitsathit, S.; Gao, W.; Uygun, A.; Katzenberg, A.; Wang, J. Self-propelled carbohydrate-sensitive microtransporters with built-in boronic acid recognition for isolating sugars and cells. J. Am. Chem. Soc. 2012, 134, 15217–15220. [Google Scholar] [CrossRef] [PubMed]
- Orozco, J.; Cortés, A.; Cheng, G.; Sattayasamitsathit, S.; Gao, W.; Feng, X.; Shen, Y.; Wang, J. Molecularly imprinted polymer-based catalytic micromotors for selective protein transport. J. Am. Chem. Soc. 2013, 135, 5336–5339. [Google Scholar] [CrossRef] [PubMed]
- Esteban-Fernandez de Avila, B.; Zhao, M.; Campuzano, S.; Ricci, F.; Pingarron, J.M.; Mascini, M.; Wang, J. Rapid micromotor-based naked-eye immunoassay. Talanta 2017, 167, 651–657. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Amouzadeh Tabrizi, M.; Shamsipur, M.; Saber, R.; Sarkar, S. Isolation of HL-60 cancer cells from the human serum sample using MnO2-PEI/Ni/Au/aptamer as a novel nanomotor and electrochemical determination of thereof by aptamer/gold nanoparticles-poly(3,4-ethylene dioxythiophene) modified GC electrode. Biosens. Bioelectron. 2018, 110, 141–146. [Google Scholar] [CrossRef] [PubMed]
- Jurado-Sánchez, B.; Pacheco, M.; Rojo, J.; Escarpa, A. Magnetocatalytic graphene quantum dots Janus micromotors for bacterial endotoxin detection. Angew. Chem. Int. Ed. 2017, 56, 6957–6961. [Google Scholar] [CrossRef] [PubMed]
- Pacheco, M.; Jurado-Sánchez, B.; Escarpa, A. Sensitive monitoring of enterobacterial contamination of food using self-propelled Janus microsensors. Anal. Chem. 2018, 90, 2912–2917. [Google Scholar] [CrossRef] [PubMed]
- Esteban-Fernández de Ávila, B.; Lopez-Ramirez, M.A.; Báez, D.F.; Jodra, A.; Singh, V.V.; Kaufmann, K.; Wang, J. Aptamer-modified graphene-based catalytic micromotors: Off–on fluorescent detection of ricin. ACS Sens. 2016, 1, 217–221. [Google Scholar] [CrossRef]
- Singh, V.V.; Kauffman, K.; Esteban-Fernández de Ávila, B.; Karshalev, E.; Wang, J. Molybdenum disulfide-based tubular microengines: Toward biomedical applications. Adv. Funct. Mater. 2016, 26, 6270–6278. [Google Scholar] [CrossRef]
- Magdanz, V.; Guix, M.; Hebenstreit, F.; Schmidt, O.G. Dynamic polymeric microtubes for the remote-controlled capture, guidance, and release of sperm cells. Adv. Mater. 2016, 28, 4084–4089. [Google Scholar] [CrossRef] [PubMed]
- Yan, X.; Zhou, Q.; Vincent, M.; Deng, Y.; Yu, J.; Xu, J.; Xu, T.; Tang, T.; Bian, L.; Wang, Y.-X.J.; et al. Multifunctional biohybrid magnetite microrobots for imaging-guided therapy. Sci. Robot. 2017, 2. [Google Scholar] [CrossRef]
- Jung, I.; Ih, S.; Yoo, H.; Hong, S.; Park, S. Fourier transform surface plasmon resonance of nanodisks embedded in magnetic nanorods. Nano Lett. 2018, 18, 1984–1992. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Gradilla, V.; Orozco, J.; Sattayasamitsathit, S.; Soto, F.; Kuralay, F.; Pourazary, A.; Katzenberg, A.; Gao, W.; Shen, Y.; Wang, J. Functionalized ultrasound-propelled magnetically guided nanomotors: Toward practical biomedical applications. ACS Nano 2013, 7, 9232–9240. [Google Scholar] [CrossRef] [PubMed]
- Esteban-Fernández de Ávila, B.; Martín, A.; Soto, F.; Lopez-Ramirez, M.A.; Campuzano, S.; Vásquez-Machado, G.M.; Gao, W.; Zhang, L.; Wang, J. Single cell real-time miRNAs sensing based on nanomotors. ACS Nano 2015, 9, 6756–6764. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Esteban-Fernandez de Avila, B.; Martin, A.; Christianson, C.; Gao, W.; Thamphiwatana, S.K.; Escarpa, A.; He, Q.; Zhang, L.; Wang, J. RBC micromotors carrying multiple cargos towards potential theranostic applications. Nanoscale 2015, 7, 13680–13686. [Google Scholar] [CrossRef] [PubMed]
- Campuzano, S.; Orozco, J.; Kagan, D.; Guix, M.; Gao, W.; Sattayasamitsathit, S.; Claussen, J.C.; Merkoçi, A.; Wang, J. Bacterial isolation by lectin-modified microengines. Nano Lett. 2012, 12, 396–401. [Google Scholar] [CrossRef] [PubMed]
- Medina-Sánchez, M.; Schwarz, L.; Meyer, A.K.; Hebenstreit, F.; Schmidt, O.G. Cellular cargo delivery: Toward assisted fertilization by sperm-carrying micromotors. Nano Lett. 2016, 16, 555–561. [Google Scholar] [CrossRef] [PubMed]
- Kline, T.R.; Paxton, W.H.; Mallouk, T.E.; Sen, A. Catalytic nanomotors: Remote-controlled autonomous movement of striped metallic nanorods. Angew. Chem. Int. Ed. 2005, 44, 744–746. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Duan, W.; Ahmed, S.; Mallouk, T.E.; Sen, A. Small power: Autonomous nano- and micromotors propelled by self-generated gradients. Nano Today 2013, 8, 531–554. [Google Scholar] [CrossRef]
- Wang, J. Template electrodeposition of catalytic nanomotors. Faraday Discuss. 2014, 164, 9–18. [Google Scholar] [CrossRef]
- Maria-Hormigos, R.; Jurado-Sanchez, B.; Vazquez, L.; Escarpa, A. Carbon allotrope nanomaterials based catalytic micromotors. Chem. Mater. 2016, 28, 8962–8970. [Google Scholar] [CrossRef]
- Solovev, A.A.; Mei, Y.; Bermúdez Ureña, E.; Huang, G.; Schmidt, O.G. Catalytic microtubular jet engines self-propelled by accumulated gas bubbles. Small 2009, 5, 1688–1692. [Google Scholar] [CrossRef] [PubMed]
- Jurado-Sánchez, B.; Pacheco, M.; Maria-Hormigos, R.; Escarpa, A. Perspectives on Janus micromotors: Materials and applications. Appl. Mater. Today 2017, 9, 407–418. [Google Scholar] [CrossRef]
- Dey, K.K.; Zhao, X.; Tansi, B.M.; Méndez-Ortiz, W.J.; Córdova-Figueroa, U.M.; Golestanian, R.; Sen, A. Micromotors powered by enzyme catalysis. Nano Lett. 2015, 15, 8311–8315. [Google Scholar] [CrossRef] [PubMed]
- Ma, X.; Hortelão, A.C.; Patiño, T.; Sánchez, S. Enzyme catalysis to power Micro/Nanomachines. ACS Nano 2016, 10, 9111–9122. [Google Scholar] [CrossRef] [PubMed]
- Patiño, T.; Feiner-Gracia, N.; Arqué, X.; Miguel-López, A.; Jannasch, A.; Stumpp, T.; Schäffer, E.; Albertazzi, L.; Sánchez, S. Influence of enzyme quantity and distribution on the self-propulsion of non-Janus urease-powered micromotors. J. Am. Chem. Soc. 2018. [Google Scholar] [CrossRef] [PubMed]
- Nicewarner-Peña, S.R.; Freeman, R.G.; Reiss, B.D.; He, L.; Peña, D.J.; Walton, I.D.; Cromer, R.; Keating, C.D.; Natan, M.J. Submicrometer metallic barcodes. Science 2001, 294, 137–141. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Pumera, M. Fabrication of micro/nanoscale motors. Chem. Rev. 2015, 115, 8704–8735. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Kagan, D.; Pak, O.S.; Clawson, C.; Campuzano, S.; Chuluun-Erdene, E.; Shipton, E.; Fullerton, E.E.; Zhang, L.; Lauga, E.; et al. Cargo-towing fuel-free magnetic nanoswimmers for targeted drug delivery. Small 2012, 8, 460–467. [Google Scholar] [CrossRef] [PubMed]
- Laocharoensuk, R.; Burdick, J.; Wang, J. Carbon-nanotube-induced acceleration of catalytic nanomotors. ACS Nano 2008, 2, 1069–1075. [Google Scholar] [CrossRef] [PubMed]
- Luis, B.P.; Jahir, O.; Pablo, G.; Arben, M. Architecting Graphene oxide rolled-up micromotors: A simple paper-based manufacturing technology. Small 2018, 14, 1702746. [Google Scholar] [CrossRef]
- Jurado-Sánchez, B.; Escarpa, A. Milli, micro and nanomotors: Novel analytical tools for real-world applications. Trends Anal. Chem. 2016, 84, 48–59. [Google Scholar] [CrossRef]
- Maria-Hormigos, R.; Jurado-Sanchez, B.; Escarpa, A. Tailored magnetic carbon allotrope catalytic micromotors for ‘on-chip’ operations. Nanoscale 2017, 9, 6286–6290. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Feng, X.; Pei, A.; Kane, C.R.; Tam, R.; Hennessy, C.; Wang, J. Bioinspired helical microswimmers based on vascular plants. Nano Lett. 2014, 14, 305–310. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Li, J.; Zhang, H.; Chang, X.; Song, W.; Hu, Y.; Shao, G.; Sandraz, E.; Zhang, G.; Li, L.; et al. Magnetically propelled fish-like nanoswimmers. Small 2016, 23, 6098–6105. [Google Scholar] [CrossRef] [PubMed]
- Srivastava, S.K.; Medina-Sanchez, M.; Koch, B.; Schmidt, O.G. Medibots: Dual-action biogenic microdaggers for single-cell surgery and drug release. Adv. Mater. 2016, 28, 832–837. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.-Z.; Hoop, M.; Mushtaq, F.; Siringil, E.; Hu, C.; Nelson, B.J.; Pané, S. Recent developments in magnetically driven micro- and nanorobots. Appl. Mater. Today 2017, 9, 37–48. [Google Scholar] [CrossRef]
- Tu, Y.; Peng, F.; Wilson, D.A. Motion manipulation of micro- and nanomotors. Adv. Mater. 2017, 29, 1701970. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Li, T.; Li, J.; Gao, W.; Xu, T.; Christianson, C.; Gao, W.; Galarnyk, M.; He, Q.; Zhang, L.; et al. Turning erythrocytes into functional micromotors. ACS Nano 2014, 8, 12041–12048. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Castro, L.A.; Hoyos, M.; Mallouk, T.E. Autonomous motion of metallic microrods propelled by ultrasound. ACS Nano 2012, 6, 6122–6132. [Google Scholar] [CrossRef] [PubMed]
- Xu, T.; Xu, L.-P.; Zhang, X. Ultrasound propulsion of micro-/nanomotors. Appl. Mater. Today 2017, 9, 493–503. [Google Scholar] [CrossRef]
- Moo, J.G.S.; Pumera, M. Self-propelled micromotors monitored by particle-electrode impact voltammetry. ACS Sens. 2016, 1, 949–957. [Google Scholar] [CrossRef]
- Vilela, D.; Cossio, U.; Parmar, J.; Martinez-Villacorta, A.M.; Gomez-Vallejo, V.; Llop, J.; Sanchez, S. Medical imaging for the tracking of micromotors. ACS Nano 2018, 12, 1220–1227. [Google Scholar] [CrossRef] [PubMed]
- Orozco, J.; Jurado-Sánchez, B.; Wagner, G.; Gao, W.; Vazquez-Duhalt, R.; Sattayasamitsathit, S.; Galarnyk, M.; Cortés, A.; Saintillan, D.; Wang, J. Bubble-propelled micromotors for enhanced transport of passive tracers. Langmuir 2014, 30, 5082–5087. [Google Scholar] [CrossRef] [PubMed]
- Kagan, D.; Calvo-Marzal, P.; Balasubramanian, S.; Sattayasamitsathit, S.; Manesh, K.M.; Flechsig, G.-U.; Wang, J. Chemical sensing based on catalytic nanomotors: Motion-based detection of trace silver. J. Am. Chem. Soc. 2009, 131, 12082–12083. [Google Scholar] [CrossRef] [PubMed]
- Orozco, J.; Pan, G.; Sattayasamitsathit, S.; Galarnyk, M.; Wang, J. Micromotors to capture and destroy anthrax simulant spores. Analyst 2015, 140, 1421–1427. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Micromotor | Biosensing Element | Detection Mechanism | Analyte | LB | Ref. |
|---|---|---|---|---|---|
| Catalytic propulsion | |||||
| Au-Pt nanowires | Oligonucleotides | Motion based | DNA RNA | Low | [15] |
| Au-PPy nanowires | Glucose oxidase Glutamate oxidase Xantina oxidase | Motion based | Glucose Glutamate Xantine | Low | [16] |
| PEDOT-Au micromotors | DNA-Pt NPs | Motion based | DNA | Low | [17,18] |
| Ti/Fe/Au/Pt rolled-up micromotors | Antibody | Optical | Hela cancer cells | Low | [19] |
| AuNPs-PANI/Pt tubular micromotors | Antibody | Optical | Proteins | Low | [20] |
| PABA/Ni/Pt tubular micromotors | Built-in | Optical | Yeast cells | Low | [21] |
| MIP-PEDOT/Pt tubular micromotors | Built-in | Fluorescent | Proteins (avidin-FTIC) | Low | [22] |
| PEDOT/Ni/Pt tubular micromotors | Antibody | Colorimetric | Cortisol | Low | [23] |
| MnO2/Ni/Au nanosheets | Aptamer | Electrochemical | HL-60 cancer cells | Low | [24] |
| PCL-PtNPs Janus micromotors | PABA functionalized GQDS | Fluorescent | Endotoxins | Low | [25,26] |
| Graphene/Pt | Aptamers | Fluorescent | Toxins (ricin) | Low | [27] |
| MoS2/Pt | Dye-labeled DNA Aptamers | Fluorescent | DNA Thrombin | Low | [28] |
| Magnetic propulsion | |||||
| PNIPAM-co-ABP-AAc/Ti/Fe rolled-up microtubes | - | Optical | Sperm cells | High | [29] |
| Microalgae/Fe3O4 helices | Native algae fluorescent | Optical MRI | Bioanalytes In vivo imaging | High | [30] |
| Au-Ni-Au nanowires | Antibody | SERS | Influenza virus | High | [31] |
| Ultrasound propulsion | |||||
| Au-Ni-Au nanowires | Antibody | Optical | Escherichia Coli Staphylococcus Aureus | High | [32] |
| Au-graphene nanowires | Dye-labeled single-stranded DNA | Fluorescent | microRNA | High | [33] |
| Red blood cell-Fe3O4 NPs | CdTe quantum dots | Fluorescent | - | High | [34] |
| Propulsion | In Vivo Detection | In Vitro Detection |
|---|---|---|
| Catalytic | Low biocompatibility Negligible applicability Requires extremely low peroxide levels Enzyme motors: hampered locomotion in salt-rich environments | Easy functionalization Enhanced mixing Improved kinetics High towing force High versatility Practical applicability |
| Magnetic | High biocompatibility Do not require fuel Easy targeted delivery Easy functionalization | Easy functionalization Low reaction kinetics Limited applicability |
| Ultrasound | High biocompatibility Do not require fuel Can easily diffuse into cells | Easy functionalization Low reaction kinetics Limited applicability |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jurado-Sánchez, B. Nanoscale Biosensors Based on Self-Propelled Objects. Biosensors 2018, 8, 59. https://doi.org/10.3390/bios8030059
Jurado-Sánchez B. Nanoscale Biosensors Based on Self-Propelled Objects. Biosensors. 2018; 8(3):59. https://doi.org/10.3390/bios8030059
Chicago/Turabian StyleJurado-Sánchez, Beatriz. 2018. "Nanoscale Biosensors Based on Self-Propelled Objects" Biosensors 8, no. 3: 59. https://doi.org/10.3390/bios8030059
APA StyleJurado-Sánchez, B. (2018). Nanoscale Biosensors Based on Self-Propelled Objects. Biosensors, 8(3), 59. https://doi.org/10.3390/bios8030059