Gaining a Sense of Touch Object Stiffness Estimation Using a Soft Gripper and Neural Networks


Abstract
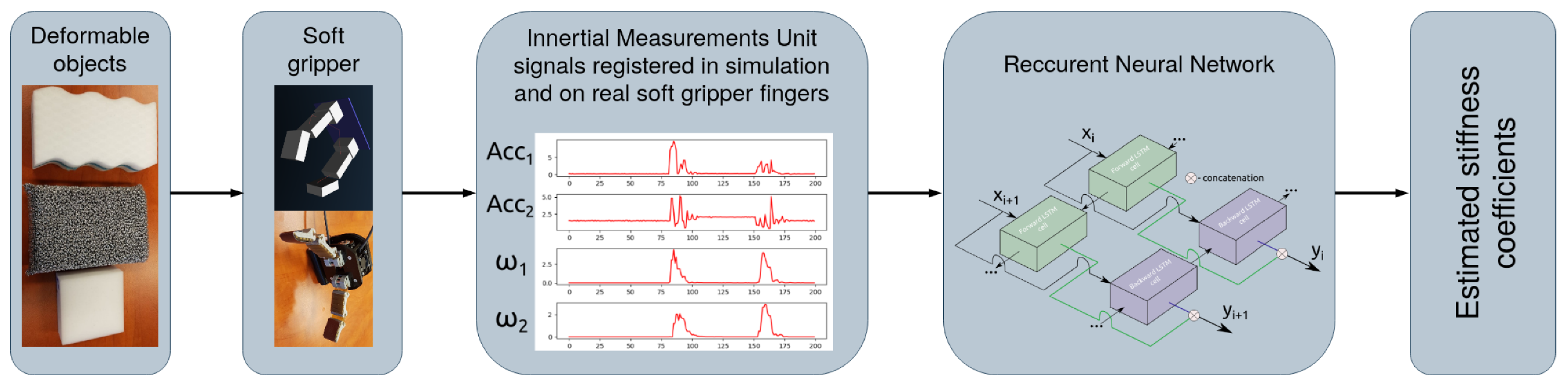
:1. Introduction
- (1)
- Creation of simulated environments for generating contact signals from IMU and examining the soft gripper in various scenarios.
- (2)
- Verification of the performance of three neural networks in the task of stiffness parameter estimation—one purely convolutional and two recurrent models.
- (3)
- The real-world verification of the proposed solution.
- (4)
- The extensive examination of the reality-gap between the simulated and real data.
- (5)
- The open-source implementation and data used in the experiments available online (https://github.com/mbed92/soft-grip).
2. Related Work
2.1. Measuring and Estimating a Stiffness
2.2. IMU Measurements Applications
2.3. Underactuated and Soft Grippers
3. Method
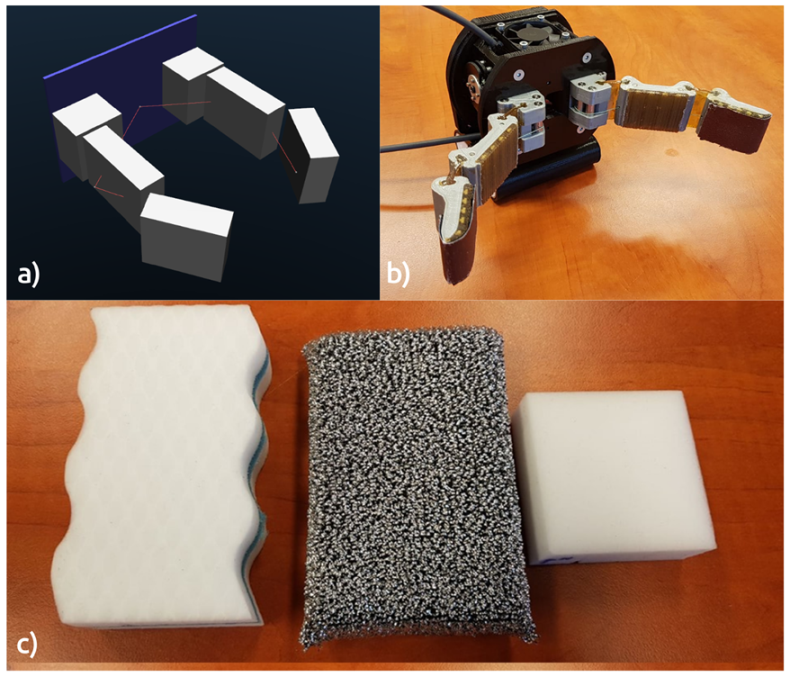
3.1. Real Data
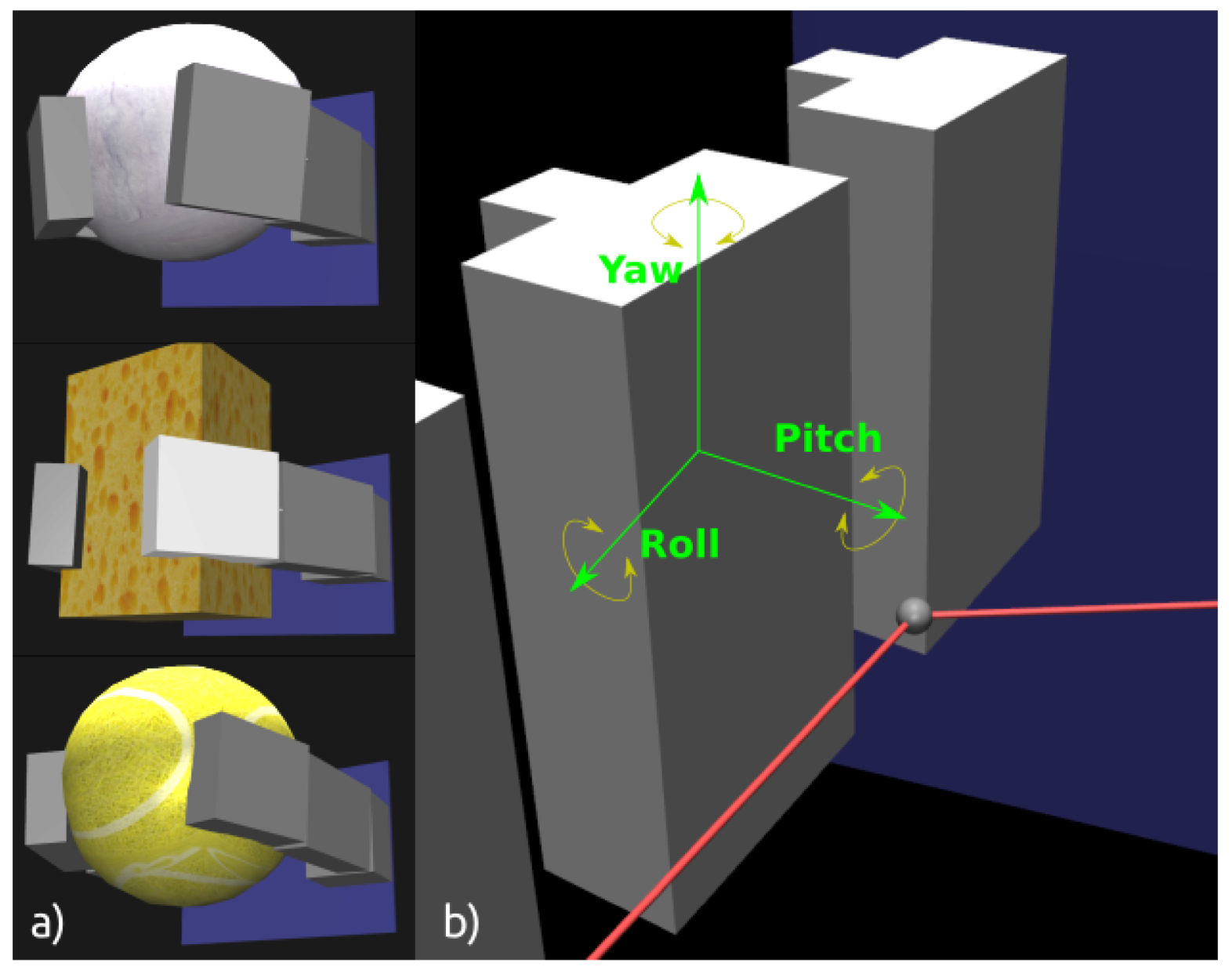
3.2. Simulation
3.3. Experimental Design
3.4. Network Architecture
4. Results
4.1. Neural Network Architecture Comparison
4.2. Shape Generalisation
4.3. Sim-To-Real Gap
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pfeifer, R.; Lungarella, M.; Iida, F. Self-Organization, Embodiment, and Biologically Inspired Robotics. Science 2007, 318, 1088–1093. [Google Scholar] [CrossRef] [Green Version]
- Odhner, L.U.; Ma, R.R.; Dollar, A.M. Open-Loop Precision Grasping with Underactuated Hands Inspired by a Human Manipulation Strategy. IEEE Trans. Autom. Sci. Eng. 2013, 10, 625–633. [Google Scholar] [CrossRef]
- Homberg, B.S.; Katzschmann, R.K.; Dogar, M.R.; Rus, D. Haptic identification of objects using a modular soft robotic gripper. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 1698–1705. [Google Scholar]
- Li, S.; Stampfli, J.J.; Xu, H.J.; Malkin, E.; Diaz, E.V.; Rus, D.; Wood, R.J. A Vacuum-driven Origami “Magic-ball” Soft Gripper. In Proceedings of the International Conference on Robotics and Automation, ICRA 2019, Montreal, QC, Canada, 20–24 May 2019; pp. 7401–7408. [Google Scholar]
- Manti, M.; Hassan, T.; Passetti, G.; D’Elia, N.; Laschi, C.; Cianchetti, M. A Bioinspired Soft Robotic Gripper for Adaptable and Effective Grasping. Soft Robot. 2015, 2, 107–116. [Google Scholar] [CrossRef]
- Atalay, A.; Sanchez, V.; Atalay, O.; Vogt, D.; Haufe, F.; Wood, R.J.; Walsh, C.J. Batch Fabrication of Customizable Silicone-Textile Composite Capacitive Strain Sensors for Human Motion Tracking. Adv. Mater. Technol. 2017. [Google Scholar] [CrossRef] [Green Version]
- Chorley, C.; Melhuish, C.; Pipe, T.; Rossiter, J. Development of a Tactile Sensor Based on Biologically Inspired Edge Encoding. In Proceedings of the Advanced Robotics, ICAR, Munich, Germany, 22–26 June 2009. [Google Scholar]
- Sie, A.; Realmuto, J.; Rombokas, E. A Lower Limb Prosthesis Haptic Feedback System for Stair Descent. In Proceedings of the 2017 Design of Medical Devices Conference, Minneapolis, MN, USA, 10–13 April 2017. V001T05A004. [Google Scholar]
- Santaera, G.; Luberto, E.; Serio, A.; Gabiccini, M.; Bicchi, A. Low-cost, fast and accurate reconstruction of robotic and human postures via IMU measurements. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2728–2735. [Google Scholar]
- Todorov, E.; Erez, T.; Tassa, Y. MuJoCo: A Physics Engine for Model-Based Control. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 5026–5033. [Google Scholar]
- Wang, P.; Wang, L.; Chen, R.; Xu, J.; Xu, J.; Gao, M. Overview and Outlook on Railway Track Stiffness Measurement. J. Mod. Transp. 2016, 24, 89–102. [Google Scholar] [CrossRef] [Green Version]
- Matsubara, A.; Yamazaki, T.; Ikenaga, S. Non-contact Measurement of Spindle Stiffness by Using Magnetic Loading Device. Int. J. Mach. Tools Manuf. 2013, 71, 20–25. [Google Scholar] [CrossRef]
- Li, X.; Bhushan, B. A Review of Nanoindentation Continuous Stiffness Measurement Technique and Its Applications. Mater. Charact. 2002, 48, 11–36. [Google Scholar] [CrossRef]
- Sul, O.; Choi, E.; Lee, S.B. A Portable Stiffness Measurement System. Sensors 2017, 17, 2686. [Google Scholar] [CrossRef] [Green Version]
- Marter, A.; Dickinson, A.; Pierron, F.; Browne, M. A Practical Procedure for Measuring the Stiffness of Foam like Materials. Exp. Tech. 2018, 42, 439–452. [Google Scholar] [CrossRef] [Green Version]
- Petrů, M.; Novák, O. Measurement and Numerical Modeling of Mechanical Properties of Polyurethane Foams. In Aspects of Polyurethanes; Yilmaz, F., Ed.; IntechOpen: Rijeka, Croatia, 2017; Chapter 4. [Google Scholar]
- Kicki, P.; Bednarek, M.; Walas, K. Robotic Manipulation of Elongated and Elastic Objects. In Proceedings of the 2019 Signal Processing: Algorithms, Architectures, Arrangements, and Applications (SPA), Poznan, Poland, 23–25 September 2019; pp. 23–27. [Google Scholar]
- Coutinho, F.; Cortesão, R. Online Stiffness Estimation for Robotic Tasks with Force Observers. Control. Eng. Pract. 2014, 24, 92–105. [Google Scholar] [CrossRef]
- Hattori, G.; Serpa, A.L. Contact Stiffness Estimation in Ansys Using Simplified Models and Artificial Neural Networks. Finite Elem. Anal. Des. 2015, 97, 43–53. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Hendricks, L.A.; Kuchenbecker, K.J.; Darrell, T. Deep Learning for Tactile Understanding from Visual and Haptic Data. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 536–543. [Google Scholar]
- Wettels, N.; Santos, V.; Johansson, R.; Loeb, G. Biomimetic Tactile Sensor Array. Adv. Robot. 2008, 22, 829–849. [Google Scholar] [CrossRef] [Green Version]
- Chin, K.; Hellebrekers, T.; Majidi, C. Machine Learning for Soft Robotic Sensing and Control. Adv. Intell. Syst. 2020, 2, 1900171. [Google Scholar] [CrossRef]
- Zimmer, J.; Hellebrekers, T.; Asfour, T.; Majidi, C.; Kroemer, O. Predicting Grasp Success with a Soft Sensing Skin and Shape-Memory Actuated Gripper. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 7120–7127. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. Controlling of Pneumatic Muscle Actuator Systems by Parallel Structure of Neural Network and Proportional Controllers (PNNP). Front. Robot. AI 2020, 7, 115. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Falotico, E.; Renda, F.; Laschi, C. Model-Based Reinforcement Learning for Closed-Loop Dynamic Control of Soft Robotic Manipulators. IEEE Trans. Robot. 2019, 35, 124–134. [Google Scholar] [CrossRef]
- Bern, J.M.; Schnider, Y.; Banzet, P.; Kumar, N.; Coros, S. Soft Robot Control With a Learned Differentiable Model. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 417–423. [Google Scholar]
- Rotella, N.; Mason, S.; Schaal, S.; Righetti, L. Inertial Sensor-Based Humanoid Joint State Estimation. arXiv 2016, arXiv:1602.05134v1. [Google Scholar]
- Ancillao, A.; Tedesco, S.; Barton, J.; O’Flynn, B. Indirect Measurement of Ground Reaction Forces and Moments by Means of Wearable Inertial Sensors: A Systematic Review. Sensors 2018, 18, 2564. [Google Scholar] [CrossRef] [Green Version]
- Culbertson, H.; Delgado, J.J.L.; Kuchenbecker, K.J. The Penn Haptic Texture Toolkit for Modeling, Rendering, and Evaluating Haptic Virtual Textures; ResearchGate: Berlin, Germany, 2014. [Google Scholar]
- Slobodenyuk, N.; Jraissati, Y.; Kanso, A.; Ghanem, L.; Elhajj, I. Cross-Modal Associations Between Color and Haptics. Atten. Percept. Psychophys. 2015, 68, 1379–1395. [Google Scholar] [CrossRef] [Green Version]
- Ji, M.; Fang, L.; Zheng, H.; Strese, M.; Steinbach, E. Preprocessing-free Surface Material Classification using Convolutional Neural Networks Pretrained by Sparse Autoencoder. In Proceedings of the IEEE International Workshop on Machine Learning for Signal Processing, Boston, MA, USA, 17–20 September 2015. [Google Scholar]
- Tomovic, R.; Boni, G. An Adaptive Artificial Hand. Autom. Control. Ire Trans. 1962, 7, 3–10. [Google Scholar] [CrossRef]
- Aukes, D.; Heyneman, B.; Ulmen, J.; Stuart, H.; Cutkosky, M.; Kim, S.; Garcia, P.; Edsinger, A. Design and testing of a selectively compliant underactuated hand. Int. Robot. Res. 2014, 33, 721–735. [Google Scholar] [CrossRef]
- Mańkowski, T.; Tomczyński, J.; Walas, K.; Belter, D. PUT-Hand—Hybrid Industrial and Biomimetic Gripper for Elastic Object Manipulation. Electronics 2020, 9, 1147. [Google Scholar] [CrossRef]
- You, W.S.; Lee, Y.H.; Oh, H.S.; Kang, G.; Choi, H.R. Design of a 3D-printable, robust anthropomorphic robot hand including intermetacarpal joints. Intell. Serv. Robot. 2019, 12, 1–16. [Google Scholar] [CrossRef]
- Kang, L.; Seo, J.T.; Kim, S.H.; Kim, W.J.; Yi, B.J. Design and Implementation of a Multi-Function Gripper for Grasping General Objects. Appl. Sci. 2019, 9, 5266. [Google Scholar] [CrossRef] [Green Version]
- Foumani, M.; Gunawan, I.; Smith-Miles, K.; Ibrahim, M.Y. Notes on Feasibility and Optimality Conditions of Small-Scale Multifunction Robotic Cell Scheduling Problems With Pickup Restrictions. IEEE Trans. Ind. Inform. 2015, 11, 821–829. [Google Scholar] [CrossRef] [Green Version]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Suzumori, K.; Iikura, S.; Tanaka, H. Applying a Flexible Microactuator to Robotic Mechanisms. IEEE Control. Syst. Mag. 1992, 12, 21–27. [Google Scholar] [CrossRef]
- Terryn, S.; Brancart, J.; Lefeber, D.; Van Assche, G.; Vanderborght, B. Self-healing soft pneumatic robots. Sci. Robot. 2017, 2. [Google Scholar] [CrossRef]
- Gu, G.Y.; Zhu, J.; Zhu, L.M.; Zhu, X. A Survey on Dielectric Elastomer Actuators for Soft Robots. Bioinspir. Biomimetics 2017, 12, 011003. [Google Scholar] [CrossRef]
- Sreekumar, M.; Nagarajan, T.; Singaperumal, M.; Zoppi, M.; Molfino, R. Critical Review of Current Trends in Shape Memory Alloy Actuators for Intelligent Robots. Ind. Robot. Int. J. 2007, 34, 285–294. [Google Scholar] [CrossRef]
- Liu, C.H.; Huang, G.F.; Chiu, C.H.; Pai, T.Y. Topology Synthesis and Optimal Design of an Adaptive Compliant Gripper to Maximize Output Displacement. J. Intell. Robot. Syst. 2018, 90, 287–304. [Google Scholar] [CrossRef]
- Xu, Z.; Todorov, E. Design of a Highly Biomimetic Anthropomorphic Robotic Hand Towards Artificial Limb Regeneration. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3485–3492. [Google Scholar] [CrossRef]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. [Google Scholar] [CrossRef] [Green Version]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Schuster, M.; Paliwal, K. Bidirectional Recurrent Neural Networks. IEEE Trans. Signal Process. 1997, 45, 2673–2681. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
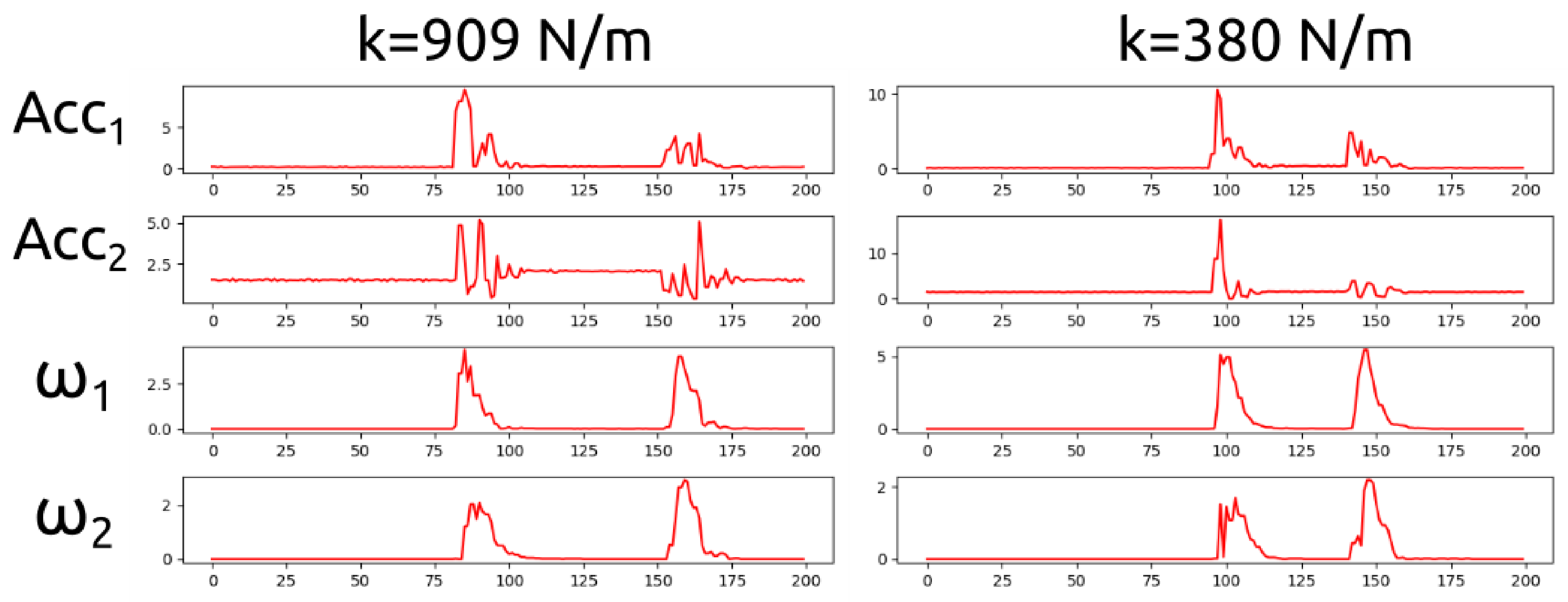
| Object | Stiffness [N/m] |
|---|---|
| Wire sponge | 909 |
| Hard sponge | 1020 |
| Polish sponge | 735 |
| Soft sponge | 380 |
| Squash ball | 1353 |
| Name | Train/Validation | Test |
|---|---|---|
| Simulation (box only) | 5000 | - |
| Simulation (all shapes) | 3999 | 399 |
| Real-world | 200 | 300 |
| ConvNet | ConvLSTMNet | ConvBiLSTMNet | ||||
|---|---|---|---|---|---|---|
| k-Fold | MAE | MAPE | MAE | MAPE | MAE | MAPE |
| I | 19.1 | 2.4 | 6.2 | 0.8 | 6.2 | 0.8 |
| II | 11.8 | 1.6 | 5.4 | 0.7 | 5.4 | 0.7 |
| III | 15.1 | 2.2 | 7.8 | 1.1 | 7.8 | 1.1 |
| IV | 14.6 | 1.9 | 6.7 | 0.9 | 6.7 | 0.9 |
| V | 18.1 | 2.1 | 6.2 | 1.0 | 6.2 | 1.0 |
| MEAN | 15.7 | 2.0 | 6.8 | 0.9 | 6.5 | 0.9 |
| SD | 2.9 | 0.3 | 0.9 | 0.2 | 0.7 | 0.1 |
| k-Fold | Dataset | |||||
|---|---|---|---|---|---|---|
| Ball | Box | Cylinder | ||||
| MAE | MAPE | MAE | MAPE | MAE | MAPE | |
| I | 20.3 | 2.0 | 24.1 | 1.8 | 15.6 | 1.8 |
| II | 29.6 | 2.6 | 12.9 | 1.6 | 15.8 | 1.9 |
| III | 27.1 | 2.0 | 22.8 | 1.8 | 16.0 | 1.9 |
| IV | 21.8 | 2.1 | 17.7 | 16.6 | 18.4 | 1.9 |
| V | 19.3 | 2.0 | 24.4 | 1.5 | 20.8 | 1.9 |
| MEAN | 23.6 | 2.1 | 20.4 | 4.7 | 17.3 | 1.9 |
| SD | 4.5 | 0.3 | 5.0 | 6.7 | 2.2 | 0.0 |
| Experiment Name | k-Fold | MEAN | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| I | II | III | IV | V | MAE | MAPE | ||||||
| MAE | MAPE | MAE | MAPE | MAE | MAPE | MAE | MAPE | MAE | MAPE | |||
| sim + noise | 281.3 | 37.7 | 275.0 | 38.5 | 275.6 | 38.4 | 282.7 | 37.6 | 256.6 | 37.9 | 274.2 ± 10.4 | 38.0 ± 0.4 |
| sim + 50 real | 190.6 | 23.1 | 216.1 | 27.1 | 187.8 | 26.4 | 151.8 | 21.6 | 200.7 | 27.7 | 189.4 ± 23.8 | 25.2 ± 2.7 |
| sim + 100 real | 134.6 | 20.6 | 108.3 | 17.6 | 134.9 | 19.6 | 126.8 | 18.6 | 126.6 | 18.3 | 126.2 ± 10.8 | 18.9 ± 1.2 |
| sim + 150 real | 89.3 | 12.9 | 85.9 | 13.7 | 92.7 | 13.2 | 73.9 | 11.0 | 79.9 | 10.2 | 84.3 ± 7.5 | 12.2 ± 1.5 |
| sim + 200 real | 66.9 | 9.1 | 49.3 | 7.0 | 82.6 | 10.9 | 67.4 | 8.4 | 56.6 | 8.0 | 64.6 ± 12.6 | 8.7 ± 1.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bednarek, M.; Kicki, P.; Bednarek, J.; Walas, K. Gaining a Sense of Touch Object Stiffness Estimation Using a Soft Gripper and Neural Networks. Electronics 2021, 10, 96. https://doi.org/10.3390/electronics10010096
Bednarek M, Kicki P, Bednarek J, Walas K. Gaining a Sense of Touch Object Stiffness Estimation Using a Soft Gripper and Neural Networks. Electronics. 2021; 10(1):96. https://doi.org/10.3390/electronics10010096
Chicago/Turabian StyleBednarek, Michal, Piotr Kicki, Jakub Bednarek, and Krzysztof Walas. 2021. "Gaining a Sense of Touch Object Stiffness Estimation Using a Soft Gripper and Neural Networks" Electronics 10, no. 1: 96. https://doi.org/10.3390/electronics10010096
APA StyleBednarek, M., Kicki, P., Bednarek, J., & Walas, K. (2021). Gaining a Sense of Touch Object Stiffness Estimation Using a Soft Gripper and Neural Networks. Electronics, 10(1), 96. https://doi.org/10.3390/electronics10010096