
A Survey of the Tactile Internet: Design Issues and Challenges, Applications, and Future Directions




Abstract
:1. Introduction
1.1. Vision of the Tactile Internet
1.2. Evolution of the TI
1.3. Recent Advances in the Tactile Internet
1.4. Research Motivation
1.5. Main Contribution
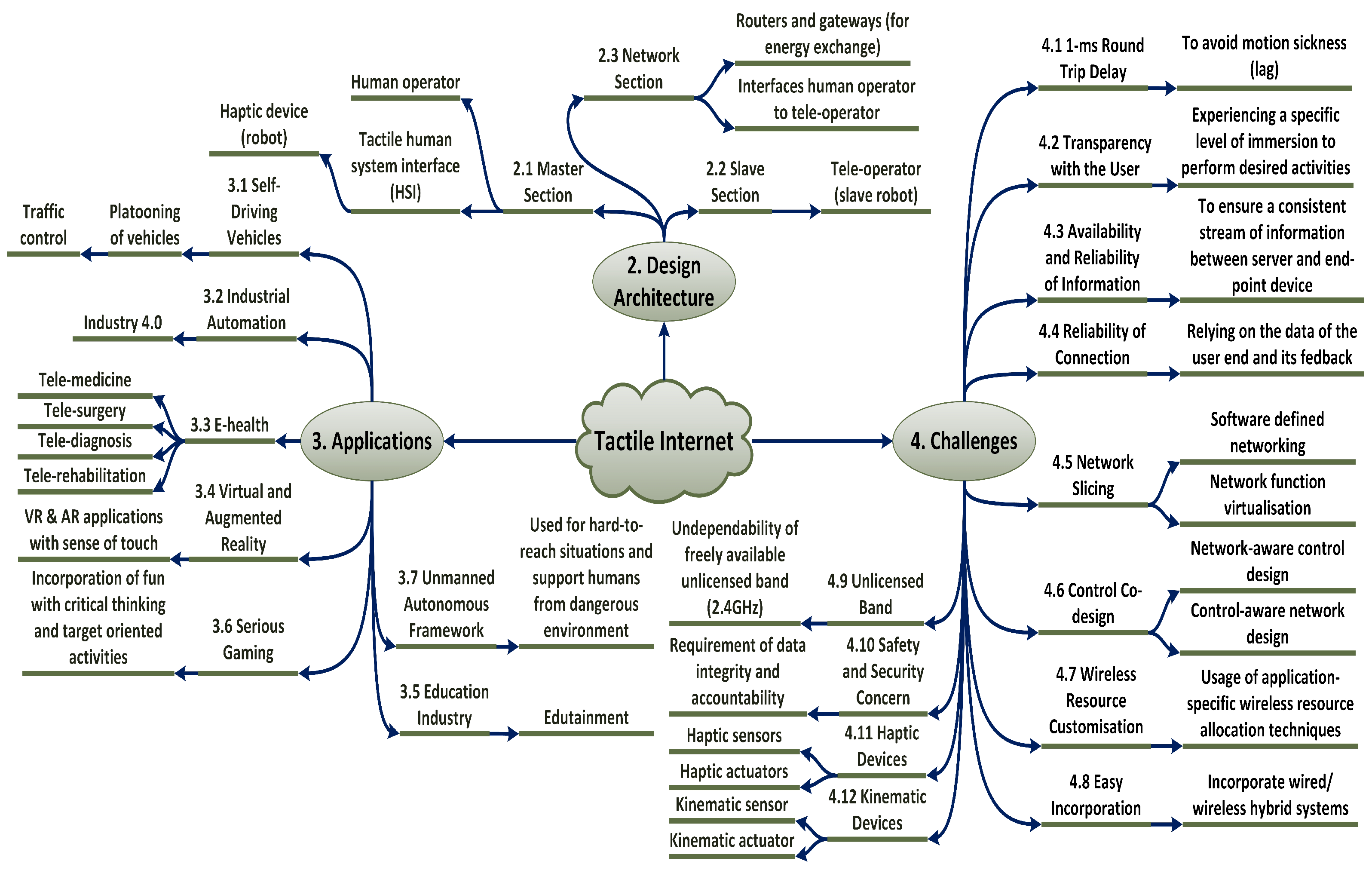
- We emphasise the TI design aspects with proposed application-centric design architecture, where the main sections of the architecture, i.e., master, network, and slave sections, with their functions, are explored.
- We identify the key application areas and provide discussions with proposed illustrative diagrams of use cases. Moreover, the multiple application scenarios with required the TI competencies and their performance metrics are tabulated.
- We provide an in-depth discussion of the identified current issues and challenges with potential enablers of the TI. In addition, some possible future research directions are provided to give an insight to researchers.
- We present a comprehensive review focussing on the related articles on enabling technologies such as 5G, SDN, NFV, Cloud/Edge/Fog Computing, Multiple Access, and Network Coding to realise the TI. Here, the contribution of the related articles is summarised according to enabling technologies.
1.6. Structure of the Article
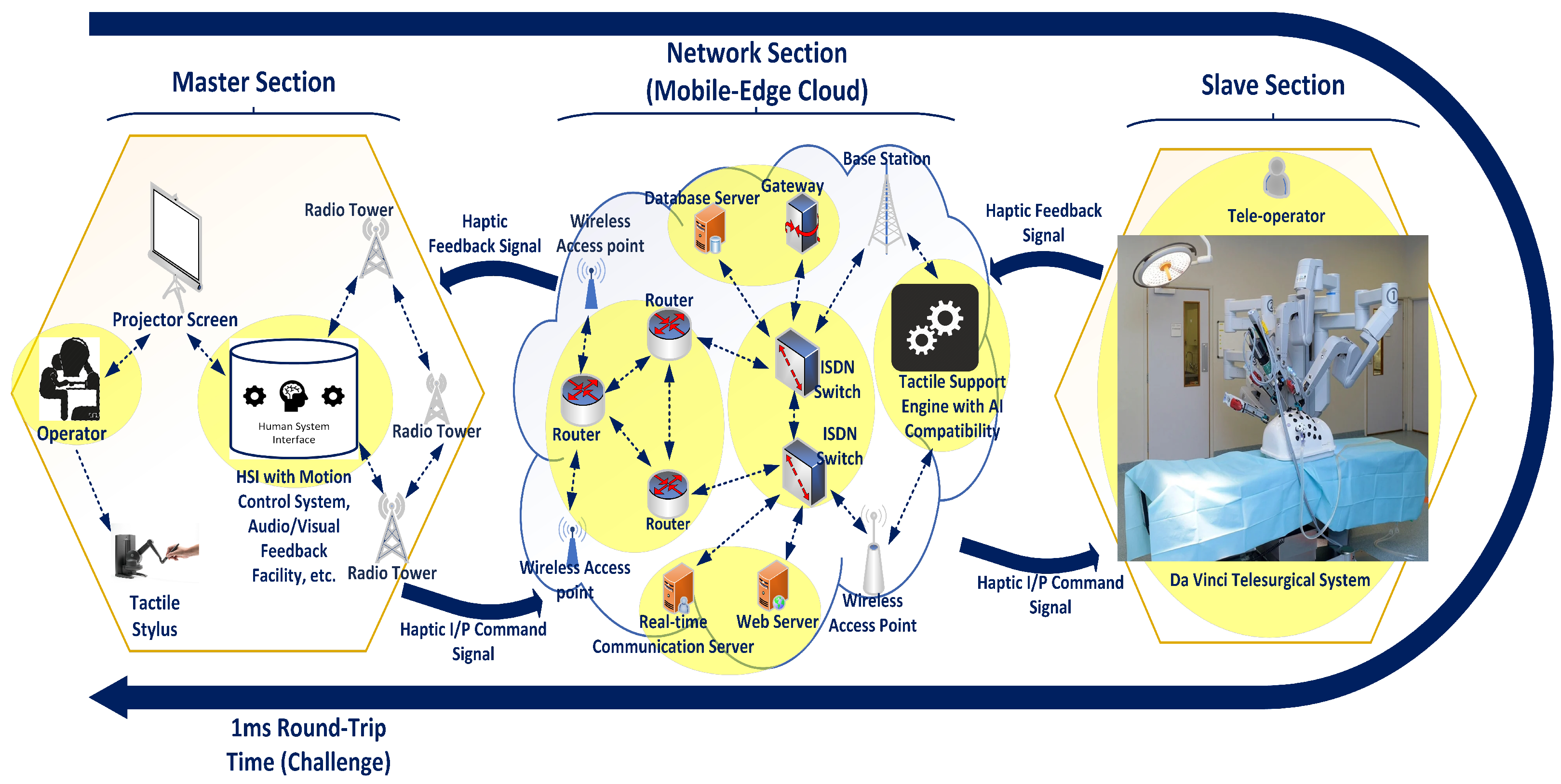
2. Design Aspects of the Tactile Internet
2.1. Master Section
2.2. Slave Section
2.3. Network Section
3. Applications of the Tactile Internet
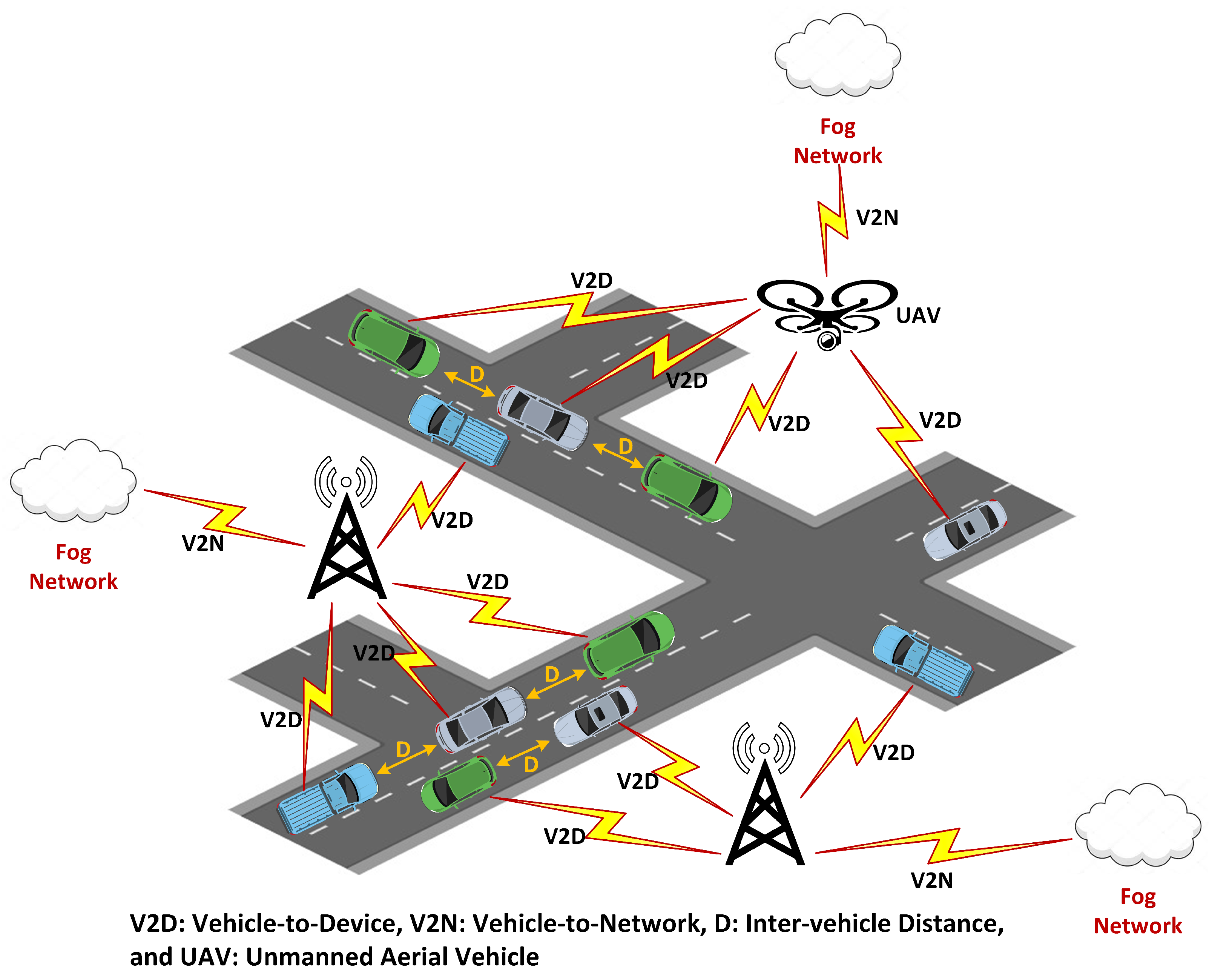
3.1. Self-Driving Vehicles
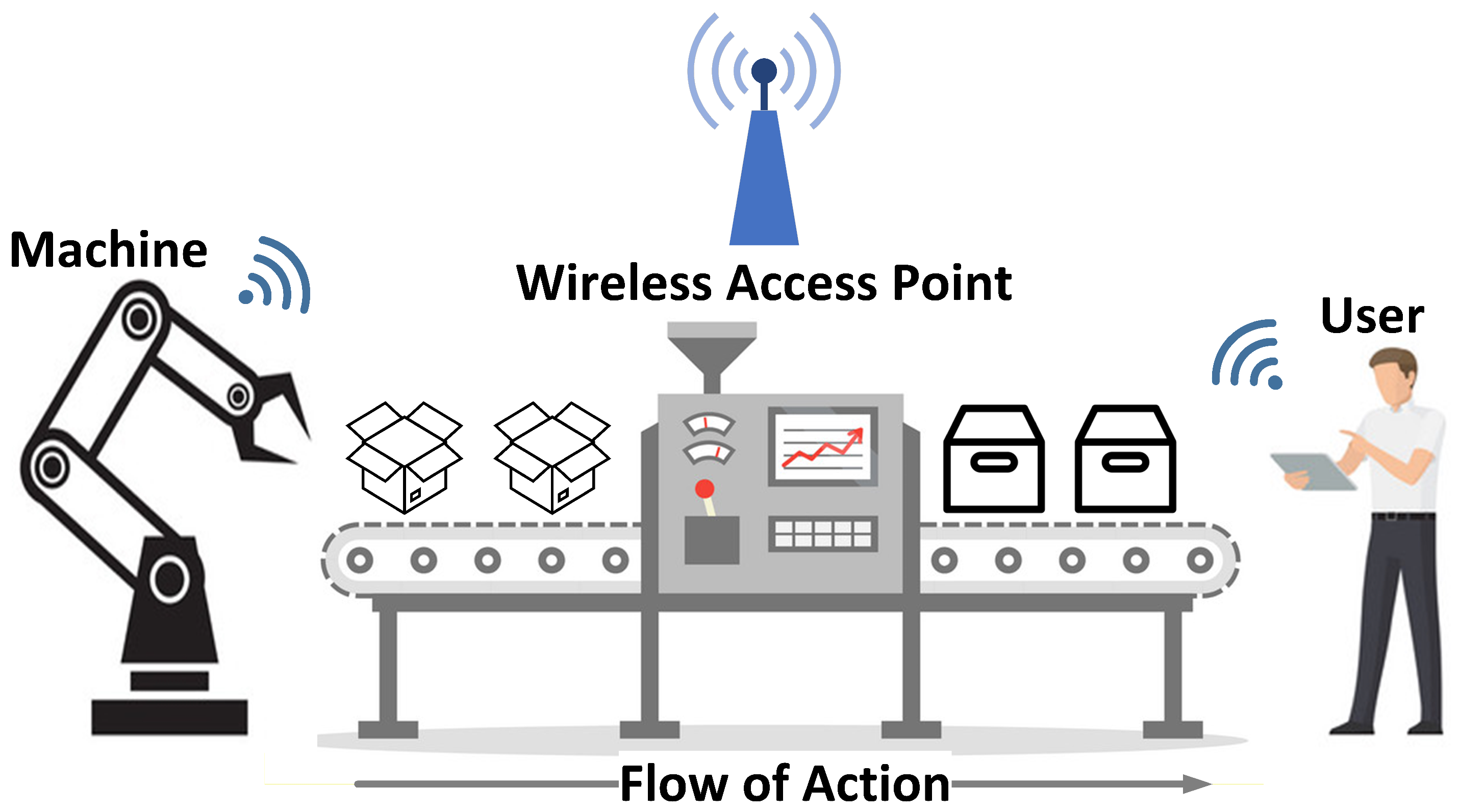
3.2. Industrial Automation
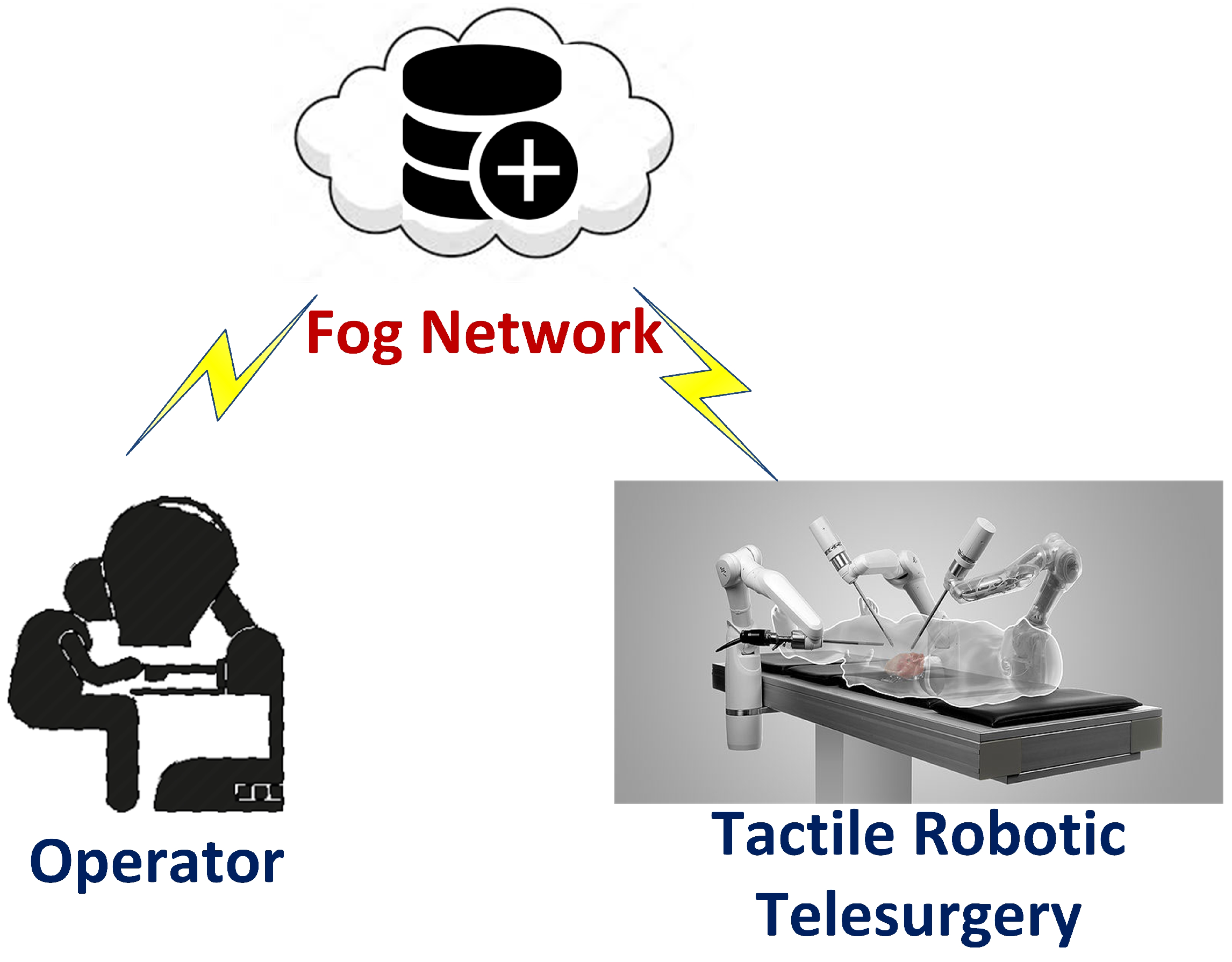
3.3. eHealth
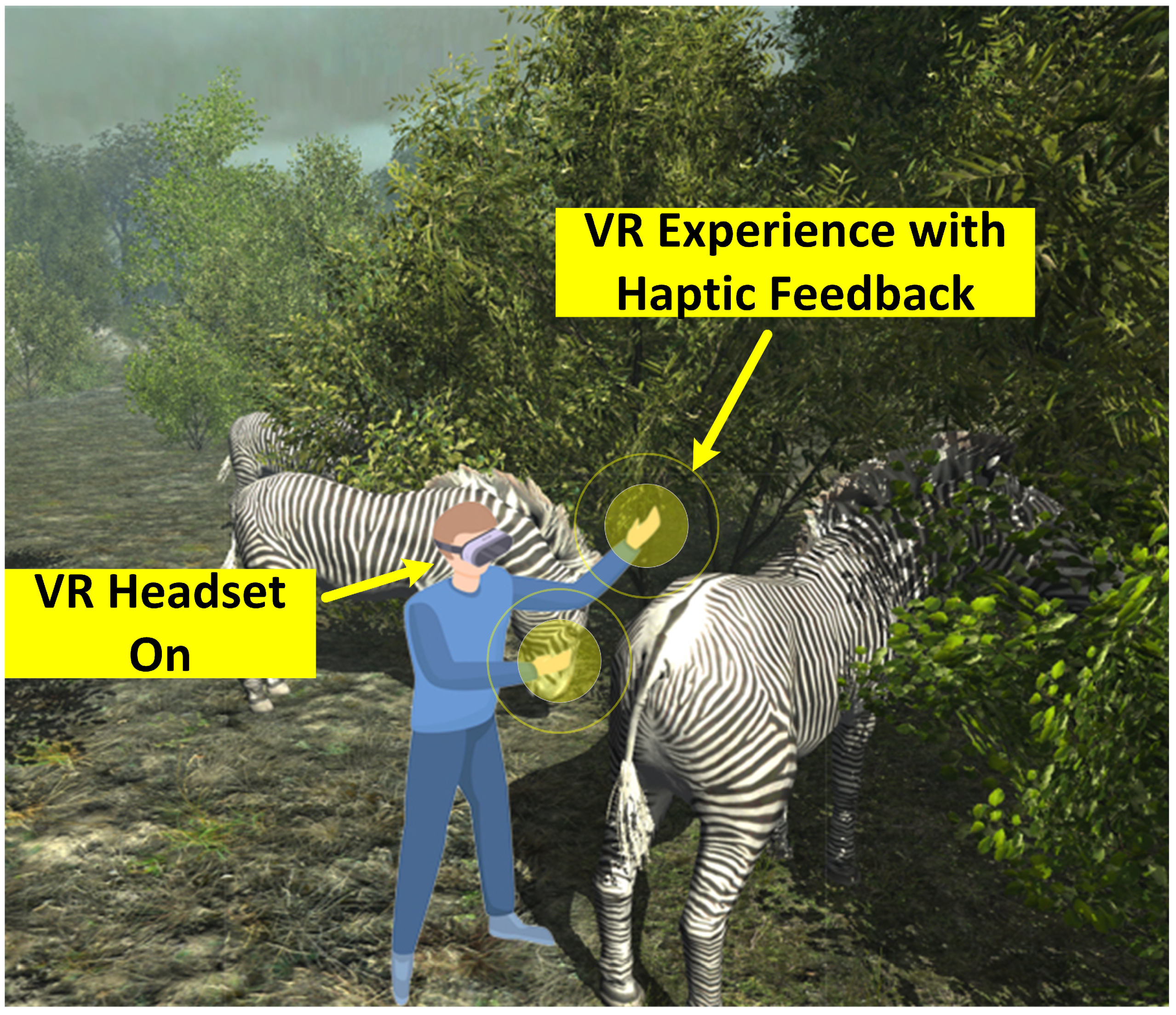
3.4. Virtual and Augmented Reality
3.5. Education
3.6. Serious Gaming
3.7. Other TI Applications
4. Current Issues and Challenges of Realising the Tactile Internet
4.1. Transparency with the User
4.2. Round-Trip Time of 1 ms
4.3. Availability and Reliability of Information
4.4. Reliability of Connection
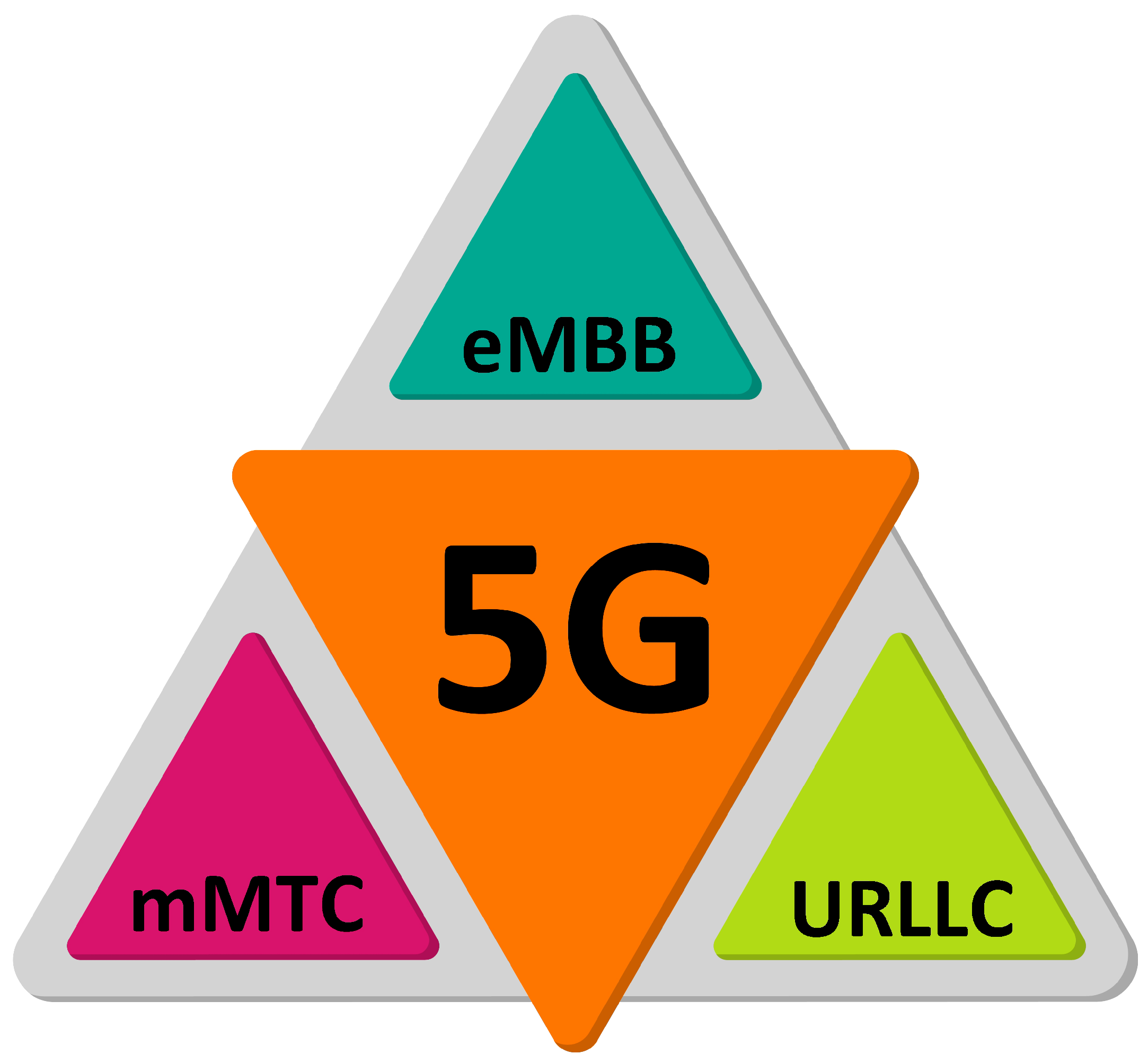
4.5. Network Slicing
- Enhanced mobile broadband (eMBB): Mainly focusses on faster speeds for applications demanding higher rates.
- Massive Machine-Type Communication (mMTC): Mainly focusses on sensing and monitoring systems.
- Ultra-reliable low-latency communications (URLLC): Mainly focusses on providing very low latency for mission-critical systems.
4.6. Control Co-Design
4.7. Wireless Resource Customisation
4.8. Easy Incorporation
4.9. Unlicensed Band and More
4.10. Safety and Security Concerns
4.11. Challenges Related to Haptic Devices
4.11.1. Haptic Sensors
4.11.2. Haptic Actuators
4.12. Challenges Related to Kinematic Devices
4.12.1. Kinematic Sensors
4.12.2. Kinematic Actuators
5. Review of Related Articles
5.1. The Potential of the Tactile Internet
5.2. SDN-Based Design
5.3. FC-Based Design
6. Summary of Challenges
7. Conclusions and Open Research Issues
Author Contributions
Funding
Conflicts of Interest
Appendix A. List of Abbreviations and Definitions
| Abbreviation | Definition | Abbreviation | Definition |
| 4G | 4th Generation | MEMS | Micro-ElectroMechanical System |
| 5G-NR | 5th Generation-New Radio | METIS | Mobile and wireless communications Enablers for the Twenty-twenty Information Society |
| API | Application Programming Interface | MIT | Massachusetts Institute of Technology |
| AR | Augmented Reality | mm | MilliMetre |
| B5G | Beyond 5th Generation | MTC | Machine-Type Communication |
| BS | Base Station | NFV | Network Function Virtualisation |
| CDC | Cloud Data Centre | NGMN | Next-Generation Mobile Network |
| CPS | Cyber-Physical System | OFDM | Orthogonal Frequency Division Multiplexing |
| CSI | Channel State Information | ONOS | Open Network Operating System |
| D2D | Device-to-Device | PDA | Personal Digital Assistant |
| DC | Data Centre | PDMS | PolyDiMethylSiloxane |
| DoF | Degree of Freedom | POL | Passive Optical Local Area |
| DSI | Digital Senses Initiative | QoE | Quality of Experience |
| EDGE | Enhanced Data Rates for GSM Evolution | QoS | Quality of Service |
| ETSI | European Telecommunication Standards Institute | RAN | Radio Access Network |
| FC | Fog Computing | RDNA | Residue-Defined Networking Architecture |
| FCN | Fog Computing Node | RFID | Radio-Frequency Identification Device |
| FDA | Food and Drug Administrator | RTT | Round-Trip Time |
| FiWi | FibreWireless | SDI | Software-Defined Infrastructure |
| FoT | Fog of Things | SDN | Software-defined Networking |
| GPRS | General Packet Radio Services | TI | Tactile Internet |
| H2H | Human-to-Human | TSN | Time-Sensitive Networking |
| H2M | Human-to-Machine | UAV | Unmanned Aerial Vehicle |
| HSI | Human–System Interface | UE | User Equipment |
| IEEE | Institute of Electrical and Electronics Engineers | UMTS | Universal Mobile Telecommunications Service |
| IoT | Internet of Things | UX | User Experience |
| IT | Information Technology | V2I | Vehicle-to-Infrastructure |
| ITS | Intelligent Transport System | V2V | Vehicle-to-Vehicle |
| ITU-T | International Telecommunications Union-Telecommunication Standardisation Sector | VANET | Vehicular Ad hoc Network |
| LAN | Local Area Network | VF | Virtual Function |
| M2M | Machine-to-Machine | VM | Virtual Machine |
| MA | Multiple Access | VR | Virtual Reality |
| MAC | Medium Access Control | WAN | Wide-Area Network |
| MANO | Management and Orchestration | Wi-Fi | Wireless-Fidelity |
| MEC | Mobile-Edge Computing | WSN | Wireless Sensor Network |
References
- Fettweis, G.; Boche, H.; Wiegand, T.; Zielinski, E.; Schotten, H.; Merz, P.; Hirche, S.; Festag, A.; Häffner, W.; Meyer, M.; et al. The Tactile Internet-ITU-T Technology Watch Report; ITU: Geneva, Switzerland, 2014. [Google Scholar]
- Maier, M. Un âge d’or économique dont le numerique est la trame de fond. Interview in Planète INRS. ca 2013. Available online: https://ieeexplore.ieee.org/document/7470948/references#references (accessed on 29 August 2021).
- Fettweis, G.; Alamouti, S. 5G: Personal Mobile Internet beyond What Cellular did to Telephony. IEEE Commun. Mag. 2014, 52, 140–145. [Google Scholar] [CrossRef]
- Fettweis, G.P. The Tactile Internet: Applications and Challenges. IEEE Veh. Technol. Mag. 2014, 9, 64–70. [Google Scholar] [CrossRef]
- Brynjolfsson, E.; McAfee, A. The Second Machine Age: Work, Progress, and Prosperity in a Time of Brilliant Technologies; WW Norton & Company: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Kim, K.S.; Kim, D.K.; Chae, C.B.; Choi, S.; Ko, Y.C.; Kim, J.; Lim, Y.G.; Yang, M.; Kim, S.; Lim, B. Ultrareliable and Low-latency Communication Techniques for Tactile Internet Services. Proc. IEEE 2018, 107, 376–393. [Google Scholar] [CrossRef] [Green Version]
- Andreev, S.; Galinina, O.; Pyattaev, A.; Gerasimenko, M.; Tirronen, T.; Torsner, J.; Sachs, J.; Dohler, M.; Koucheryavy, Y. Understanding the IoT Connectivity Landscape: A Contemporary M2M Radio Technology Roadmap. IEEE Commun. Mag. 2015, 53, 32–40. [Google Scholar] [CrossRef] [Green Version]
- Maier, M.; Chowdhury, M.; Rimal, B.P.; Van, D.P. The Tactile Internet: Vision, Recent Progress, and Open Challenges. IEEE Commun. Mag. 2016, 54, 138–145. [Google Scholar] [CrossRef]
- Zou, L.; Ge, C.; Wang, Z.J.; Cretu, E.; Li, X. Novel Tactile Sensor Technology and Smart Tactile Sensing Systems: A Review. Sensors 2017, 17, 2653. [Google Scholar] [CrossRef]
- Holland, O.; Steinbach, E.; Prasad, R.V.; Liu, Q.; Dawy, Z.; Aijaz, A.; Pappas, N.; Chandra, K.; Rao, V.S.; Oteafy, S. The IEEE 1918.1 “Tactile Internet” Standards Working Group and its Standards. Proc. IEEE 2019, 107, 256–279. [Google Scholar] [CrossRef] [Green Version]
- Aijaz, A.; Dawy, Z.; Pappas, N.; Simsek, M.; Oteafy, S.; Holland, O. Toward a Tactile Internet Reference Architecture: Vision and Progress of the IEEE P1918.1 Standard (2018). arXiv 2018, arXiv:1807.11915. [Google Scholar]
- Szymanski, T.H. Securing the Industrial-tactile Internet of Things with Deterministic Silicon Photonics Switches. IEEE Access 2016, 4, 8236–8249. [Google Scholar] [CrossRef]
- Ernst, M.O.; Banks, M.S. Humans Integrate Visual and Haptic Information in a Statistically Optimal Fashion. Nature 2002, 415, 429. [Google Scholar] [CrossRef]
- 3D Systems—Phantom Premium Haptic Devices. Available online: https://www.3dsystems.com/haptics-devices/3d-systems-phantom-premium (accessed on 29 August 2021).
- Thinglab—Geomagic Haptic Devices. Available online: https://thinglab.com.au/geomagic-haptic-devices/ (accessed on 29 August 2021).
- The Da Vinci Surgical Systems. Available online: https://www.davincisurgery.com/da-vinci-systems/about-da-vinci-systems (accessed on 29 August 2021).
- Han, B.; Gopalakrishnan, V.; Ji, L.; Lee, S. Network Function Virtualisation: Challenges and Opportunities for Innovations. IEEE Commun. Mag. 2015, 53, 90–97. [Google Scholar] [CrossRef]
- Nunes, B.A.A.; Mendonca, M.; Nguyen, X.N.; Obraczka, K.; Turletti, T. A Survey of Software-defined Networking: Past, Present, and Future of Programmable Networks. IEEE Commun. Surv. Tutor. 2014, 16, 1617–1634. [Google Scholar] [CrossRef] [Green Version]
- Ainhauser, C.; Bulwahn, L.; Hildisch, A.; Holder, S.; Lazarevych, O.; Mohr, D.; Ochs, T.; Rudorfer, M.; Scheickl, O.; Schumm, T. Autonomous Driving Needs ROS; BMW Car IT GmbH, ROSCon: Stuttgart, Germany, 2013. [Google Scholar]
- Singh, B.; Gupta, A. Recent Trends in Intelligent Transportation Systems: A Review. J. Transp. Lit. 2015, 9, 30–34. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.D.; McGehee, D.V.; Brown, T.L.; Reyes, M.L. Collision Warning Timing, Driver Distraction, and Driver Response to Imminent Rear-end Collisions in a High-fidelity Driving Simulator. Hum. Factors 2002, 44, 314–334. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mer, S.B. Smart Vehicle-to-Vehicle Communication with 5G Technology. Int. J. Recent Innov. Trends Comput. Commun 2015, 3, 3241–3244. [Google Scholar]
- Bartevyan, L. Industry 4.0—Summary report. DLG-Expert Rep. 2015, 5, 1–8. [Google Scholar]
- Schläpfer, R.C.; Koch, M.; Merkofer, P. Industry 4.0 Challenges and Solutions for the Digital Transformation and Use of Exponential Technologies; Deloitte: Zurique, Switzerland, 2015. [Google Scholar]
- Anvari, M.; Broderick, T.; Stein, H.; Chapman, T.; Ghodoussi, M.; Birch, D.W.; Mckinley, C.; Trudeau, P.; Dutta, S.; Goldsmith, C.H. The Impact of Latency on Surgical Precision and Task Completion during Robotic-assisted Remote Telepresence Surgery. Comput. Aided Surg. 2005, 10, 93–99. [Google Scholar] [CrossRef] [PubMed]
- Haddadin, S.; Johannsmeier, L.; Ledezma, F.D. Tactile Robots as a Central Embodiment of the Tactile Internet. Proc. IEEE 2018, 107, 471–487. [Google Scholar] [CrossRef]
- Nincarean, D.; Alia, M.B.; Halim, N.D.A.; Rahman, M.H.A. Mobile Augmented Reality: The Potential for Education. Procedia-Soc. Behav. Sci. 2013, 103, 657–664. [Google Scholar] [CrossRef] [Green Version]
- Harley, J.M.; Poitras, E.G.; Jarrell, A.; Duffy, M.C.; Lajoie, S.P. Comparing Virtual and Location-based Augmented Reality Mobile Learning: Emotions and Learning Outcomes. Educ. Technol. Res. Dev. 2016, 64, 359–388. [Google Scholar] [CrossRef] [Green Version]
- Bank, P.J.; Cidota, M.A.; Ouwehand, P.E.W.; Lukosch, S.G. Patient-tailored Augmented Reality Games for assessing Upper Extremity Motor Impairments in Parkinson’s Disease and Stroke. J. Med. Syst. 2018, 42, 246. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cifuentes, I.J.; Dagnino, B.L.; Salisbury, M.C.; Perez, M.E.; Ortega, C.; Maldonado, D. Augmented Reality and Dynamic Infrared Thermography for Perforator Mapping in the Anterolateral Thigh. Arch. Plast. Surg. 2018, 45, 284. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, Y. Edge Caching and Computing in 5G for Mobile Augmented Reality and Haptic Internet. Comput. Commun. 2020, 158, 24–31. [Google Scholar] [CrossRef]
- Kuipers, F.; Kooij, R.; De Vleeschauwer, D.; Brunnström, K. Techniques for measuring Quality of Experience. In International Conference on Wired/Wireless Internet Communications; Springer: Berlin/Heidelberg, Germany, 2010; pp. 216–227. [Google Scholar] [CrossRef] [Green Version]
- Ruan, Y.; Anerousis, N.; Srivatsa, M.; Xiao, J.; Christner, R.T.; Farrolas, L.; Short, J. Measuring Enterprise Network Usage Pattern & Deploying Passive Optical LANs. In Proceedings of the IFIP/IEEE International Symposium on Integrated Network Management, Ottawa, ON, Canada, 11–15 May 2015; pp. 890–893. [Google Scholar] [CrossRef]
- She, C.; Yang, C.; Quek, T.Q. Cross-layer Transmission Design for Tactile Internet. In Proceedings of the IEEE Global Communications Conference, Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Xiang, Z.; Gabriel, F.; Urbano, E.; Nguyen, G.T.; Reisslein, M.; Fitzek, F.H. Reducing Latency in Virtual Machines: Enabling Tactile Internet for Human-machine Co-working. IEEE J. Sel. Areas Commun. 2019, 37, 1098–1116. [Google Scholar] [CrossRef]
- Cziva, R.; Pezaros, D.P. On the Latency Benefits of Edge NFV. In Proceedings of the ACM/IEEE Symposium on Architectures for Networking and Communications Systems, Beijing, China, 18–19 May 2017; pp. 105–106. [Google Scholar] [CrossRef] [Green Version]
- Xie, J.; Guo, D.; Li, X.; Shen, Y.; Jiang, X. Cutting Long-tail Latency of Routing Response in Software-defined Networks. IEEE J. Sel. Areas Commun. 2018, 36, 384–396. [Google Scholar] [CrossRef]
- Khalili, R.; Despotovic, Z.; Hecker, A. Flow Setup Latency in SDN Networks. IEEE J. Sel. Areas Commun. 2018, 36, 2631–2639. [Google Scholar] [CrossRef]
- Asaduzzaman, A.; Chidella, K.K.; Vardha, D. An Energy-efficient Directory-based Multicore Architecture with Wireless Routers to minimize the Communication Latency. IEEE Trans. Parallel Distrib. Syst. 2016, 28, 374–385. [Google Scholar] [CrossRef]
- Li, J.; Shen, X.; Chen, L.; Van, D.P.; Ou, J.; Wosinska, L.; Chen, J. Service Migration in Fog Computing-enabled Cellular Networks to support Real-time Vehicular Communications. IEEE Access 2019, 7, 13704–13714. [Google Scholar] [CrossRef]
- Du, J.; Zhao, L.; Chu, X.; Yu, F.R.; Feng, J.; Chih-Lin, I. Enabling Low-latency Applications in LTE-A-based Mixed Fog/Cloud Computing Systems. IEEE Trans. Veh. Technol. 2018, 68, 1757–1771. [Google Scholar] [CrossRef]
- Huang, A.; Nikaein, N.; Stenbock, T.; Ksentini, A.; Bonnet, C. Low latency MEC Framework for SDN-based LTE/LTE-A Networks. In Proceedings of the IEEE International Conference on Communications, Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Steinbach, E.; Hirche, S.; Kammerl, J.; Vittorias, I.; Chaudhari, R. Haptic Data Compression and Communication. IEEE Signal Process. Mag. 2010, 28, 87–96. [Google Scholar] [CrossRef]
- Öhmann, D.; Simsek, M.; Fettweis, G.P. Achieving High Availability in Wireless Networks by an Optimal Number of Rayleigh-fading Links. In Proceedings of the IEEE Globecom Workshops, Austin, TX, USA, 8–12 December 2014; pp. 1402–1407. [Google Scholar] [CrossRef]
- Antonakoglou, K.; Xu, X.; Steinbach, E.; Mahmoodi, T.; Dohler, M. Toward Haptic Communications over the 5G Tactile Internet. IEEE Commun. Surv. Tutorials 2018, 20, 3034–3059. [Google Scholar] [CrossRef] [Green Version]
- Van Den Berg, D.; Glans, R.; De Koning, D.; Kuipers, F.A.; Lugtenburg, J.; Polachan, K.; Venkata, P.T.; Singh, C.; Turkovic, B.; Van Wijk, B. Challenges in Haptic Communications over the Tactile Internet. IEEE Access 2017, 5, 23502–23518. [Google Scholar] [CrossRef]
- Popovski, P.; Trillingsgaard, K.F.; Simeone, O.; Durisi, G. 5G Wireless Network Slicing for eMBB, URLLC, and mMTC: A Communication-Theoretic View. IEEE Access 2018, 6, 55765–55779. [Google Scholar] [CrossRef]
- Park, J.; Bennis, M. URLLC-eMBB Slicing to support VR Multimodal Perceptions over Wireless Cellular Systems. In Proceedings of the IEEE Global Communications Conference, Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Grasso, C.; Schembra, G. Design of a UAV-based Videosurveillance System with Tactile Internet Constraints in a 5G Ecosystem. In Proceedings of the IEEE 4th Conference on Network Softwarisation and Workshops, Montreal, QC, Canada, 25–29 June 2018; pp. 449–455. [Google Scholar] [CrossRef]
- Xu, X.; Liu, Q.; Steinbach, E. Toward QoE-driven Dynamic Control Scheme Switching for Time-delayed Teleoperation Systems: A Dedicated Case Study. In Proceedings of the IEEE International Symposium on Haptic, Audio and Visual Environments and Games, Abu Dhabi, United Arab Emirates, 22–23 October 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Aijaz, A. Hap-SliceR: A Radio Resource Slicing Framework for 5G Networks with Haptic Communications. IEEE Syst. J. 2017, 12, 2285–2296. [Google Scholar] [CrossRef]
- Su, Y.; Lu, X.; Huang, L.; Du, X.; Guizani, M. Tac-U: A Traffic Balancing Scheme over Licensed and Unlicensed Bands for Tactile Internet. Future Gener. Comput. Syst. 2019, 97, 41–49. [Google Scholar] [CrossRef]
- Sutton, G.J.; Zeng, J.; Liu, R.P.; Ni, W.; Nguyen, D.N.; Jayawickrama, B.A.; Huang, X.; Abolhasan, M.; Zhang, Z. Enabling Ultra-reliable and Low-latency Communications through Unlicensed Spectrum. IEEE Netw. 2018, 32, 70–77. [Google Scholar] [CrossRef]
- Elhajj, I.; Xi, N.; Fung, W.K.; Liu, Y.H.; Li, W.J.; Kaga, T.; Fukuda, T. Haptic Information in Internet-based Teleoperation. IEEE/ASME Trans. Mechatron. 2001, 6, 295–304. [Google Scholar] [CrossRef]
- Steinbach, E.; Hirche, S.; Ernst, M.; Brandi, F.; Chaudhari, R.; Kammerl, J.; Vittorias, I. Haptic Communications. Proc. IEEE 2012, 100, 937–956. [Google Scholar] [CrossRef]
- Chaudhari, R.; Schuwerk, C.; Danaei, M.; Steinbach, E. Perceptual and Bitrate-scalable Coding of Haptic Surface Texture Signals. IEEE J. Sel. Top. Signal Process. 2014, 9, 462–473. [Google Scholar] [CrossRef]
- Gülecyüz, B.; Xu, X.; Noll, A.; Steinbach, E. On the Quality-of-Learning for Haptic Teleoperation-based Skill Transfer over the Tactile Internet. In Proceedings of the IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- She, C.; Yang, C. Ensuring the Quality-of-Service of Tactile Internet. In Proceedings of the IEEE 83rd Vehicular Technology Conference, Nanjing, China, 15–18 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- La Viola, J.J., Jr. A Discussion of Cybersickness in Virtual Environments. ACM Sigchi Bull. 2000, 32, 47–56. [Google Scholar] [CrossRef]
- Andrews, J.G.; Buzzi, S.; Choi, W.; Hanly, S.V.; Lozano, A.; Soong, A.C.; Zhang, J.C. What will 5G be? IEEE J. Sel. Areas Commun. 2014, 32, 1065–1082. [Google Scholar] [CrossRef]
- Osseiran, A.; Boccardi, F.; Braun, V.; Kusume, K.; Marsch, P.; Maternia, M.; Queseth, O.; Schellmann, M.; Schotten, H.; Taoka, H. Scenarios for 5G Mobile and Wireless Communications: The Vision of the METIS Project. IEEE Commun. Mag. 2014, 52, 26–35. [Google Scholar] [CrossRef]
- Aijaz, A.; Dohler, M.; Aghvami, A.H.; Friderikos, V.; Frodigh, M. Realising the Tactile Internet: Haptic Communications over Next Generation 5G Cellular Networks. IEEE Wirel. Commun. 2016, 24, 82–89. [Google Scholar] [CrossRef] [Green Version]
- Payandeh, S.; Lee, J.Y. User-centered Force Signal Processing for Internet-based Telemanipulation: An Overview. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, San Diego, CA, USA, 5–8 October 2014; pp. 3978–3983. [Google Scholar] [CrossRef]
- Foukas, X.; Patounas, G.; Elmokashfi, A.; Marina, M.K. Network Slicing in 5G: Survey and Challenges. IEEE Commun. Mag. 2017, 55, 94–100. [Google Scholar] [CrossRef] [Green Version]
- Aijaz, A. Radio Resource Slicing in a Radio Access Network. U.S. Patent 10,264,461, 16 April 2019. [Google Scholar]
- Ma, L.; Wen, X.; Wang, L.; Lu, Z.; Knopp, R. An SDN/NFV-based Framework for Management and Deployment of Service-based 5G Core Network. China Commun. 2018, 15, 86–98. [Google Scholar] [CrossRef]
- Chantre, H.D.; da Fonseca, N.L. Multi-objective Optimization for Edge Device Placement and Reliable Broadcasting in 5G NFV-based Small Cell Networks. IEEE J. Sel. Areas Commun. 2018, 36, 2304–2317. [Google Scholar] [CrossRef]
- Ge, X.; Zhou, R.; Li, Q. 5G NFV-based Tactile Internet for Mission-Critical IoT Services. IEEE Internet Things J. 2019, 7, 6150–6163. [Google Scholar] [CrossRef]
- White Paper 3: End to End Network Slicing. 2017. Available online: https://www.wwrf.ch/files/content%20wwrf/publications/outlook/Outlook21.pdf (accessed on 29 August 2021).
- Mohyeldin, E. Minimum Technical Performance Requirements for IMT-2020 Radio Interface(s). 2020. Available online: https://www.itu.int/en/ITU-R/study-groups/rsg5/rwp5d/imt-2020/Documents/S01-1_Requirements%20for%20IMT-2020_Rev.pdf (accessed on 29 August 2021).
- Chan, L.; Naghdy, F.; Stirling, D. Application of Adaptive Controllers in Teleoperation Systems: A Survey. IEEE Trans. Hum.-Mach. Syst. 2014, 44, 337–352. [Google Scholar] [CrossRef]
- Seeling, P.; Fitzek, F.H. Anticipatory Networking: Negative Latency for Ubiquitous Computing. In Proceedings of the IEEE 18th Annual Consumer Communications & Networking Conference, Las Vegas, NV, USA, 9–12 January 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Aijaz, A. Toward Human-in-the-Loop Mobile Networks: A Radio Resource Allocation Perspective on Haptic Communications. IEEE Trans. Wirel. Commun. 2018, 17, 4493–4508. [Google Scholar] [CrossRef]
- Aijaz, A. Towards 5G-enabled Tactile Internet: Radio Resource Allocation for Haptic Communications. In Proceedings of the IEEE Wireless Communications and Networking Conference Workshops, Doha, Qatar, 3–6 April 2016; pp. 145–150. [Google Scholar] [CrossRef]
- She, C.; Yang, C.; Quek, T.Q. Cross-layer Optimisation for Ultra-reliable and Low-latency Radio Access Networks. IEEE Trans. Wirel. Commun. 2017, 17, 127–141. [Google Scholar] [CrossRef] [Green Version]
- Ganesan, E.; Hwang, I.S.; Liem, A.T. Resource Allocation for Tactile Internet via Software-Defined FiWi Access Network. In Proceedings of the IEEE International Computer Symposium, Tainan, Taiwan, 17–19 December 2020; pp. 283–287. [Google Scholar] [CrossRef]
- Cena, G.; Valenzano, A.; Vitturi, S. Hybrid Wired/Wireless Networks for Real-time Communications. IEEE Ind. Electron. Mag. 2008, 2, 8–20. [Google Scholar] [CrossRef]
- Monnet, W.; Yahiya, T.A. HoIP Performance for Tactile Internet over 5G Networks: A Teleoperation Case Study. In Proceedings of the IEEE 11th International Conference on Network of the Future, Bordeaux, France, 12–14 October 2020; pp. 48–54. [Google Scholar] [CrossRef]
- Cheffena, M. Industrial wireless communications over the millimeter wave spectrum: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 66–72. [Google Scholar] [CrossRef]
- Shokri-Ghadikolaei, H.; Fischione, C.; Popovski, P.; Zorzi, M. Design Aspects of Short-range Millimeter-wave Networks: A MAC Layer Perspective. IEEE Netw. 2016, 30, 88–96. [Google Scholar] [CrossRef]
- Bianco, G.; Amendola, S.; Marrocco, G. Near-field modeling of Self-tuning Antennas for the Tactile Internet. In Proceedings of the IEEE XXXIIIrd General Assembly and Scientific Symposium of the International Union of Radio Science, Rome, Italy, 29 August–5 September 2020; pp. 1–3. [Google Scholar] [CrossRef]
- Bianco, G.M.; Vivarelli, C.; Amendola, S.; Marrocco, G. Experimentation and Calibration of Near-Field UHF Epidermal Communication for emerging Tactile Internet. In Proceedings of the IEEE 5th International Conference on Smart and Sustainable Technologies, Split, Croatia, 23–26 September 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Hassija, V.; Saxena, V.; Chamola, V. A Blockchain-based Framework for Drone-mounted Base Stations in Tactile Internet Environment. In Proceedings of the IEEE INFOCOM Conference on Computer Communications Workshops, Toronto, ON, Canada, 6–9 July 2020; pp. 261–266. [Google Scholar] [CrossRef]
- Mannsfeld, S.C.; Tee, B.C.; Stoltenberg, R.M.; Chen, C.V.H.; Barman, S.; Muir, B.V.; Sokolov, A.N.; Reese, C.; Bao, Z. Highly Sensitive Flexible Pressure Sensors with Microstructured Rubber Dielectric Layers. Nat. Mater. 2010, 9, 859. [Google Scholar] [CrossRef]
- Hammond, F.L.; Mengüç, Y.; Wood, R.J. Toward a Modular Soft Sensor-embedded Glove for Human Hand Motion and Tactile Pressure Measurement. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 4000–4007. [Google Scholar] [CrossRef]
- Büscher, G.H.; Kõiva, R.; Schürmann, C.; Haschke, R.; Ritter, H.J. Flexible and Stretchable Fabric-based Tactile Sensor. Robot. Auton. Syst. 2015, 63, 244–252. [Google Scholar] [CrossRef] [Green Version]
- Liang, G.; Mei, D.; Wang, Y.; Chen, Z. Modeling and Analysis of a Flexible Capacitive Tactile Sensor Array for Normal Force Measurement. IEEE Sens. J. 2014, 14, 4095–4103. [Google Scholar] [CrossRef]
- Mizushima, M.; Takagi, S.; Itano, H.; Obata, T.; Kasahara, T.; Shoji, S.; Mizuno, J. Flexible and Capacitive Tactile Sensor Sheet. In Proceedings of the IEEE International Conference on Electronics Packaging, Toyama, Japan, 23–25 April 2014; pp. 756–759. [Google Scholar] [CrossRef]
- Liang, G.; Wang, Y.; Mei, D.; Xi, K.; Chen, Z. Flexible Capacitive Tactile Sensor Array with Truncated Pyramids as Dielectric Layer for Three-axis Force Measurement. J. Microelectromech. Syst. 2015, 24, 1510–1519. [Google Scholar] [CrossRef]
- Wang, Y.; Liang, G.; Mei, D.; Zhu, L.; Chen, Z. A Flexible Capacitive Tactile Sensor Array with High Scanning Speed for Distributed Contact Force Measurements. In Proceedings of the IEEE 29th International Conference on Micro Electro Mechanical Systems, Shanghai, China, 24–28 January 2016; pp. 854–857. [Google Scholar] [CrossRef]
- Kwon, D.; Lee, T.I.; Kim, M.; Kim, S.; Kim, T.S.; Park, I. Porous Dielectric Elastomer-based Ultra-sensitive Capacitive Pressure Sensor and its Application to Wearable Sensing Device. In Proceedings of the IEEE 18th International Conference on Solid-State Sensors, Actuators and Microsystems, Anchorage, AK, USA, 21–25 June 2015; pp. 299–302. [Google Scholar] [CrossRef]
- Pacchierotti, C.; Tirmizi, A.; Prattichizzo, D. Improving Transparency in Teleoperation by means of Cutaneous Tactile Force Feedback. ACM Trans. Appl. Percept. (TAP) 2014, 11, 4. [Google Scholar] [CrossRef]
- Pacchierotti, C.; Meli, L.; Chinello, F.; Malvezzi, M.; Prattichizzo, D. Cutaneous Haptic Feedback to ensure the Stability of Robotic Teleoperation Systems. Int. J. Robot. Res. 2015, 34, 1773–1787. [Google Scholar] [CrossRef]
- Martinez, J.; Martinez, D.; Molina, J.P.; Gonz, P.; Garcia, A. Comparison of Force and Vibrotactile Feedback with Direct Stimulation for Texture Recognition. In Proceedings of the IEEE International Conference on Cyberworlds, Calgary, AB, Canada, 4–6 October 2011; pp. 62–68. [Google Scholar] [CrossRef]
- Hoshi, T.; Takahashi, M.; Iwamoto, T.; Shinoda, H. Non-contact Tactile Display-based on Radiation Pressure of Airborne Ultrasound. IEEE Trans. Haptics 2010, 3, 155–165. [Google Scholar] [CrossRef] [PubMed]
- Martínez, J.; García, A.; Oliver, M.; Molina, J.P.; González, P. Identifying Virtual 3D Geometric Shapes with a Vibrotactile Glove. IEEE Comput. Graph. Appl. 2014, 36, 42–51. [Google Scholar] [CrossRef] [PubMed]
- Weber, P.; Rueckert, E.; Calandra, R.; Peters, J.; Beckerle, P. A Low-cost Sensor Glove with Vibrotactile Feedback and Multiple Finger Joint and Hand Motion Sensing for Human-robot Interaction. In Proceedings of the IEEE 25th International Symposium on Robot and Human Interactive Communication, New York, NY, USA, 26–31 August 2016; pp. 99–104. [Google Scholar] [CrossRef]
- Muramatsu, Y.; Niitsuma, M. Correspondence Relationships between Vibrotactile Stimuli and Tactile Sensations determined by Semantic Differential. In Proceedings of the IEEE RO-MAN, Gyeongju, Korea, 26–29 August 2013; pp. 668–673. [Google Scholar] [CrossRef]
- Galambos, P. Vibrotactile Feedback for Haptics and Telemanipulation: Survey, Concept and Experiment. Acta Polytech. Hung. 2012, 9, 41–65. [Google Scholar]
- Minamizawa, K.; Prattichizzo, D.; Tachi, S. Simplified Design of Haptic Display by extending One-point Kinesthetic Feedback to Multipoint Tactile Feedback. In Proceedings of the IEEE Haptics Symposium, Waltham, MA, USA, 25–26 March 2010; pp. 257–260. [Google Scholar] [CrossRef] [Green Version]
- Dipietro, L.; Sabatini, A.M.; Dario, P. A Survey of Glove-based Systems and their Applications. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2008, 38, 461–482. [Google Scholar] [CrossRef]
- Zhou, M.; Ben-Tzvi, P. RML Glove-An Exoskeleton Glove Mechanism with Haptics Feedback. IEEE/ASME Trans. Mechatron. 2014, 20, 641–652. [Google Scholar] [CrossRef]
- Baldi, T.L.; Scheggi, S.; Meli, L.; Mohammadi, M.; Prattichizzo, D. GESTO: A Glove for Enhanced Sensing and Touching-based on Inertial and Magnetic Sensors for Hand Tracking and Cutaneous Feedback. IEEE Trans. Hum.-Mach. Syst. 2017, 47, 1066–1076. [Google Scholar] [CrossRef]
- Ma, Y.; Mao, Z.H.; Jia, W.; Li, C.; Yang, J.; Sun, M. Magnetic Hand Tracking for Human Computer Interface. IEEE Trans. Magn. 2011, 47, 970–973. [Google Scholar] [CrossRef]
- Nelson, A.; Singh, G.; Robucci, R.; Patel, C.; Banerjee, N. Adaptive and Personalised Gesture Recognition using Textile Capacitive Sensor Arrays. IEEE Trans. Multi-Scale Comput. Syst. 2015, 1, 62–75. [Google Scholar] [CrossRef]
- Silva, L.; Dantas, R.; Diniz, P.; Jeronimo, V.; Bueno, L.; Dutra, T. PHYS. IO: Wearable Hand Tracking Device. In Proceedings of the IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications, Budapest, Hungary, 27–28 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Cohn, G.; Gupta, S.; Lee, T.J.; Morris, D.; Smith, J.R.; Reynolds, M.S.; Tan, D.S.; Patel, S.N. An Ultra-low-power Human Body Motion Sensor using Static Electric Field Sensing. In Proceedings of the ACM Conference on Ubiquitous Computing, New York, NY, USA, 5 September 2012; pp. 99–102. [Google Scholar] [CrossRef]
- Bainbridge, R.; Paradiso, J.A. Wireless Hand Gesture Capture through Wearable Passive Tag Sensing. In Proceedings of the IEEE International Conference on Body Sensor Networks, Dallas, TX, USA, 23–25 May 2011; pp. 200–204. [Google Scholar] [CrossRef]
- Simsek, M.; Aijaz, A.; Dohler, M.; Sachs, J.; Fettweis, G. The 5G-enabled Tactile Internet: Applications, Requirements, and Architecture. In Proceedings of the IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Mekikis, P.V.; Ramantas, K.; Antonopoulos, A.; Kartsakli, E.; Sanabria-Russo, L.; Serra, J.; Pubill, D.; Verikoukis, C. NFV-enabled Experimental Platform for 5G Tactile Internet support in Industrial Environments. IEEE Trans. Ind. Inform. 2020, 16, 1895–1903. [Google Scholar] [CrossRef]
- Sharma, S.K.; Woungang, I.; Anpalagan, A.; Chatzinotas, S. Toward Tactile Internet in Beyond 5G Era: Recent Advances, Current Issues, and Future Directions. IEEE Access 2020, 8, 56948–56991. [Google Scholar] [CrossRef]
- Gokhale, V.; Kroep, K.; Rao, V.S.; Verburg, J.; Yechangunja, R. TIXT: An Extensible Testbed for Tactile Internet Communication. IEEE Internet Things Mag. 2020, 3, 32–37. [Google Scholar] [CrossRef]
- Na, W.; Dao, N.N.; Kim, J.; Ryu, E.S.; Cho, S. Simulation and Measurement: Feasibility Study of Tactile Internet Applications for mmWave Virtual Reality. ETRI J. 2020, 42, 163–174. [Google Scholar] [CrossRef]
- Zhani, M.F.; ElBakoury, H. FlexNGIA: A Flexible Internet Architecture for the Next-Generation Tactile Internet. J. Netw. Syst. Manag. 2020, 28, 751–795. [Google Scholar] [CrossRef] [Green Version]
- Meshram, D.A.; Patil, D.D. 5G-enabled Tactile Internet for Tele-Robotic Surgery. Procedia Comput. Sci. 2020, 171, 2618–2625. [Google Scholar] [CrossRef]
- Wei, X.; Wu, L. A New Proposed Sensor Cloud Architecture based on Fog Computing for Internet of Things. In Proceedings of the IEEE International Conference on Internet of Things and IEEE Green Computing and Communications and IEEE Cyber, Physical and Social Computing and IEEE Smart Data, Atlanta, GA, USA, 14–17 July 2019; pp. 615–620. [Google Scholar] [CrossRef]
- Budhiraja, I.; Tyagi, S.; Tanwar, S.; Kumar, N.; Rodrigues, J.J. Tactile Internet for Smart Communities in 5G: An Insight for NOMA-Based Solutions. IEEE Trans. Ind. Inform. 2019, 15, 3104–3112. [Google Scholar] [CrossRef]
- Vora, J.; Kaneriya, S.; Tanwar, S.; Tyagi, S.; Kumar, N.; Obaidat, M.S. TILAA: Tactile Internet-based Ambient Assistant living in Fog Environment. Future Gener. Comput. Syst. 2019, 98, 635–649. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Fog Computing for 5G-enabled Tactile Internet: Research Issues, Challenges, and Future Research Directions. Mob. Netw. Appl. 2019, 1–28. [Google Scholar] [CrossRef]
- Fanibhare, V.; Sarkar, N.I.; Al-Anbuky, A. A Cloud-based Traffic Flow Framework for Tactile Internet using SDN and Fog Computing. In Proceedings of the IEEE 29th International Telecommunication Networks and Applications Conference, Auckland, New Zealand, 27–29 November 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Maier, M.; Ebrahimzadeh, A. Towards Immersive Tactile Internet Experiences: Low-latency FiWi Enhanced Mobile Networks with Edge Intelligence. IEEE/OSA J. Opt. Commun. Netw. 2019, 11, B10–B25. [Google Scholar] [CrossRef]
- Arshad, J.; Azad, M.A.; Salah, K.; Iqbal, R.; Tariq, M.I.; Umer, T. Performance Analysis of Content Discovery for Ad-hoc Tactile Networks. Future Gener. Comput. Syst. 2019, 94, 726–739. [Google Scholar] [CrossRef]
- Ren, J.; Yu, G.; He, Y.; Li, G.Y. Collaborative Cloud and Edge Computing for Latency Minimisation. IEEE Trans. Veh. Technol. 2019, 68, 5031–5044. [Google Scholar] [CrossRef]
- Liberato, A.; Martinello, M.; Gomes, R.L.; Beldachi, A.F.; Salas, E.; Villaca, R.; Ribeiro, M.R.; Kondepu, K.; Kanellos, G.; Nejabati, R. RDNA: Residue-defined Networking Architecture enabling Ultra-Reliable Low Latency Datacenters. IEEE Trans. Netw. Serv. Manag. 2018, 15, 1473–1487. [Google Scholar] [CrossRef]
- Cabrera, J.A.; Schmoll, R.S.; Nguyen, G.T.; Pandi, S.; Fitzek, F.H. Softwarisation and Network Coding in the Mobile Edge Cloud for the Tactile Internet. Proc. IEEE 2018, 107, 350–363. [Google Scholar] [CrossRef]
- Perepelkin, D.; Ivanchikova, M.; Byshov, V.; Tsyganov, I. Algorithm and Software of Virtual Slices Formation in Software Defined Networks. In Proceedings of the IEEE 28th International Conference Radioelektronika, Prague, Czech Republic, 19–20 April 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Xiao, Y.; Krunz, M. Distributed Optimisation for Energy-Efficient Fog Computing in the Tactile Internet. IEEE J. Sel. Areas Commun. 2018, 36, 2390–2400. [Google Scholar] [CrossRef] [Green Version]
- Ateya, A.A.; Muthanna, A.; Gudkova, I.; Abuarqoub, A.; Vybornova, A.; Koucheryavy, A. Development of Intelligent Core Network for Tactile Internet and Future Smart Systems. J. Sens. Actuator Netw. 2018, 7, 1. [Google Scholar] [CrossRef] [Green Version]
- Troia, S.; Rodriguez, A.; Alvizu, R.; Maier, G. SENATUS: An Experimental SDN/NFV Orchestrator. In Proceedings of the IEEE Conference on Network Function Virtualisation and Software Defined Networks, Verona, Italy, 27–29 November 2018; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Li, C.P.; Hosseini, K.; Lee, S.B.; Jiang, J.; Chen, W.; Horn, G.; Ji, T.; Smee, J.E.; Li, J. 5G-based Systems Design for Tactile Internet. Proc. IEEE 2018, 107, 307–324. [Google Scholar] [CrossRef]
- Gharbaoui, M.; Contoli, C.; Davoli, G.; Cuffaro, G.; Martini, B.; Paganelli, F.; Cerroni, W.; Cappanera, P.; Castoldi, P. Demonstration of Latency-Aware and Self-Adaptive Service Chaining in 5G/SDN/NFV Infrastructures. In Proceedings of the IEEE Conference on Network Function Virtualisation and Software Defined Networks, Verona, Italy, 27–29 November 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Chatras, B.; Kwong, U.S.T.; Bihannic, N. NFV enabling Network Slicing for 5G. In Proceedings of the IEEE 20th Conference on Innovations in Clouds, Internet and Networks, Paris, France, 7–9 March 2017; pp. 219–225. [Google Scholar] [CrossRef]
- Ma, Y.W.; Chen, Y.C.; Chen, J.L. SDN-enabled Network Virtualisation for Industry 4.0 based on IoTs and Cloud Computing. In Proceedings of the IEEE 19th International Conference on Advanced Communication Technology, PyeongChang, Korea, 19–22 February 2017; pp. 199–202. [Google Scholar] [CrossRef]
- Theodorou, T.; Mamatas, L. CORAL-SDN: A Software-defined Networking Solution for the Internet of Things. In Proceedings of the IEEE Conference on Network Function Virtualisation and Software-Defined Networks, Berlin, Germany, 6–8 November 2017; pp. 1–2. [Google Scholar] [CrossRef]
- Wang, K.; Wang, Y.; Zeng, D.; Guo, S. An SDN-based Architecture for Next Generation Wireless Networks. IEEE Wirel. Commun. 2017, 24, 25–31. [Google Scholar] [CrossRef]
- Ateya, A.A.; Vybornova, A.; Samouylov, K.; Koucheryavy, A. System Model for Multi-level Cloud-based Tactile Tnternet System. In International Conference on Wired/Wireless Internet Communication; Springer: Cham, Denmark, 15 June 2017; pp. 77–86. [Google Scholar] [CrossRef] [Green Version]
- Feng, Y.; Jayasundara, C.; Nirmalathas, A.; Wong, E. IEEE 802.11 HCCA for Tactile Applications. In Proceedings of the IEEE 27th International Telecommunication Networks and Applications Conference, Melbourne, VIC, Australia, 22–24 November 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Pilz, J.; Mehlhose, M.; Wirth, T.; Wieruch, D.; Holfeld, B.; Haustein, T. A Tactile Internet Demonstration: 1 ms Ultra Low Delay for Wireless Communications towards 5G. In Proceedings of the IEEE Conference on Computer Communications Workshops, San Francisco, CA, USA, 10–14 April 2016; pp. 862–863. [Google Scholar] [CrossRef]
- Athmiya, N.; Shobha, K.; Sarimela, V. Feasibility Study and Implementation of OpenFlow-based SDN Controller for Tactical Scenario. In Proceedings of the IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology, Bangalore, India, 20–21 May 2016; pp. 789–794. [Google Scholar] [CrossRef]
- Intharawijitr, K.; Iida, K.; Koga, H. Analysis of Fog Model considering Computing and Communication Latency in 5G Cellular Networks. In Proceedings of the IEEE International Conference on Pervasive Computing and Communication Workshops, Sydney, NSW, Australia, 14–18 March 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Simsek, M.; Aijaz, A.; Dohler, M.; Sachs, J.; Fettweis, G. 5G-enabled Tactile Internet. IEEE J. Sel. Areas Commun. 2016, 34, 460–473. [Google Scholar] [CrossRef] [Green Version]
- Tong, L.; Li, Y.; Gao, W. A Hierarchical Edge Cloud Architecture for Mobile Computing. In Proceedings of the IEEE INFOCOM–The 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Truong, N.B.; Lee, G.M.; Ghamri-Doudane, Y. Software-defined Networking-based Vehicular Adhoc Network with Fog Computing. In Proceedings of the IFIP/IEEE International Symposium on Integrated Network Management, Ottawa, ON, Canada, 11–15 May 2015; pp. 1202–1207. [Google Scholar] [CrossRef] [Green Version]
- Iovanna, P.; Ubaldi, F. SDN Solutions for 5G Transport Networks. In Proceedings of the IEEE International Conference on Photonics in Switching, Florence, Italy, 22–25 September 2015; pp. 297–299. [Google Scholar] [CrossRef]
- Szabo, D.; Gulyas, A.; Fitzek, F.H.; Lucani, D.E. Towards the Tactile Internet: Decreasing Communication Latency with Network Coding and Software-defined Networking. In Proceedings of the 21th European Wireless Conference, Verona, Italy, 20 May 2015; pp. 1–6. [Google Scholar]
- Bonomi, F. Connected Vehicles, The Internet of Things, and Fog Computing. In Proceedings of the 8th ACM International Workshop on Vehicular Inter-Networking (VANET), Las Vegas, NV, USA, 23 September 2011; pp. 13–15. [Google Scholar]
- Cuervo, E.; Balasubramanian, A.; Cho, D.k.; Wolman, A.; Saroiu, S.; Chandra, R.; Bahl, P. MAUI: Making Smartphones Last Longer with Code Offload. In Proceedings of the 8th ACM International Conference on Mobile Systems, Applications, and Services, New York, NY, USA, 15 June 2010; pp. 49–62. [Google Scholar] [CrossRef]
- Next Generation Mobile Networks Alliance. 5G White Paper; Next Generation Mobile Networks Alliance: Frankfurt am Main, Germany, 2015. [Google Scholar]
- Bonomi, F.; Milito, R.; Natarajan, P.; Zhu, J. Fog Computing: A Platform for Internet of Things and Analytics. In Big Data and Internet of Things: A Roadmap for Smart Environments; Springer: Cham, Denmark, 12 March 2014; pp. 169–186. [Google Scholar] [CrossRef]
- Igder, S.; Bhattacharya, S.; Elmirghani, J.M. Energy Efficient Fog Servers for Internet of Things Information Piece Delivery (IoTIPD) in a Smart City Vehicular Environment. In Proceedings of the IEEE 10th International Conference on Next Generation Mobile Applications, Security and Technologies, Cardiff, UK, 24–26 August 2016; pp. 99–104. [Google Scholar] [CrossRef]
- Jalali, F.; Hinton, K.; Ayre, R.; Alpcan, T.; Tucker, R.S. Fog Computing may help to save energy in Cloud Computing. IEEE J. Sel. Areas Commun. 2016, 34, 1728–1739. [Google Scholar] [CrossRef]
- Delfin, S.; Sivasanker, N.; Raj, N.; Anand, A. Fog Computing: A New Era of Cloud Computing. In Proceedings of the IEEE 3rd International Conference on Computing Methodologies and Communication, Erode, India, 27–29 March 2019; pp. 1106–1111. [Google Scholar] [CrossRef]
- Al Yami, M.; Schaefer, D. Fog Computing as a Complementary Approach to Cloud Computing. In Proceedings of the IEEE International Conference on Computer and Information Sciences, Sakaka, Saudi Arabia, 3–4 April 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Hong, K.; Lillethun, D.; Ramachandran, U.; Ottenwälder, B.; Koldehofe, B. Mobile Fog: A Programming Model for Large-scale Applications on the Internet of Things. In Proceedings of the Second ACM SIGCOMM Workshop on Mobile Cloud Computing, New York, NY, USA, 16 August 2013; pp. 15–20. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application Area or Scenario | TI Competencies Needed | Performance Metrics with Requirements |
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
| Types of Experience | Influential Constituent Elements of AR and VR | References |
|---|---|---|
| Behavioural Experience | Interactivity, Context-aware, Portability and Wearability, Information Embedding | [27,28,29,30,31] |
| Emotional Experience | Visual Enhancement (Input), Information Embedding and Context-aware | |
| Social Experience | Context-aware, Information Embedding and Visual Enhancement (Input) | |
| Cognitive Experience | Information Embedding, Content Creation and Visual Enhancement (Input) | |
| Sensory Experience | Portability and Wearability, Geolocation and Visual Enhancement (Input and control) | |
| Basic Experience | User and Technical Guidance, Context-aware, Information Embedding, Visual Enhancement and Interactivity |
| Challenges | Description | Potential Enabler and Solution with References |
|---|---|---|
| Ultra-low Latency (1 ms RTT) | To avoid noticeable motion sickness (lag). | |
| Transparency with the User | Action performed in real time must be the same in the remote scenario to have desired feedback to the end user. Experience a specific level of immersion to perform desired activities. |
|
| Ultra-high Availability and Reliability of Information/ Connection | To ensure a consistent stream of information between server and end user. Relying on the data of the end user and its feedback. |
|
| Network Slicing | Trade-off between the three generic services of 5G, viz. eMBB, mMTC and URLLC. | |
| Wireless Resource Customisation | Usage of application-specific wireless resources allocation techniques. | |
| Easy Incorporation | Incorporation of wired and wireless system, i.e., hybrid systems. |
|
| Unlicensed Band | Undependability of freely available unlicensed band. | |
| Safety and Security Concern | Regarding the data integrity and accountability. |
|
| Haptic Devices | Dealing with Haptic Sensor and Haptic Actuators. |
|
| Kinematic Devices | Dealing with Kinematic Sensors and Kinematic Actuators |
|
| Attributes/Generic Services | eMBB | mMTC | URLLC |
|---|---|---|---|
| RTT | Moderately Low | Moderately Low | Extremely Low |
| Throughput | Moderately High/High | Moderately Low | Moderately Low/Moderate/Moderately High |
| Availability | Moderate | Moderate | Extremely High |
| Frequency of Data Transfers | Moderately High | Moderately Low | Moderately High |
| Authors | Year | 5G | SDN | NFV | CC/EC /FC | MA | Net. Cod. |
|---|---|---|---|---|---|---|---|
| Cheng et al. [31] | 2020 | ✓ | × | × | ✓ | × | × |
| Mekikis et al. [110] | 2020 | ✓ | ✓ | ✓ | × | × | × |
| Sharma et al. [111] | 2020 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Gokhale et al. [112] | 2020 | ✓ | ✓ | × | × | × | ✓ |
| Na et al. [113] | 2020 | ✓ | × | × | × | × | × |
| Zhani and ElBakoury [114] | 2020 | ✓ | ✓ | ✓ | ✓ | × | × |
| Meshram and Patil [115] | 2020 | ✓ | ✓ | ✓ | ✓ | × | × |
| X. Wei et al. [116] | 2019 | × | × | × | ✓ | × | × |
| I. Budhiraja et al. [117] | 2019 | ✓ | × | × | × | ✓ | × |
| Vora et al. [118] | 2019 | ✓ | × | × | ✓ | × | × |
| Ge et al. [68] | 2019 | ✓ | × | ✓ | × | × | × |
| Aggarwal and Kumar [119] | 2019 | ✓ | ✓ | ✓ | ✓ | × | × |
| Fanibhare et al. [120] | 2019 | ✓ | ✓ | × | ✓ | × | × |
| Maier and Ebrahimzadeh [121] | 2019 | ✓ | × | × | ✓ | × | ✓ |
| Arshad et al. [122] | 2019 | ✓ | × | × | ✓ | × | ✓ |
| Jinke Ren et al. [123] | 2019 | × | × | × | ✓ | × | × |
| Kim et al. [6] | 2018 | ✓ | × | × | × | ✓ | ✓ |
| Grasso and Schembra [49] | 2018 | ✓ | × | × | × | × | ✓ |
| Alextian et.al [124] | 2018 | ✓ | ✓ | × | × | × | × |
| J. Cabrera et al. [125] | 2018 | ✓ | ✓ | ✓ | ✓ | × | ✓ |
| Dmitry et al. [126] | 2018 | × | ✓ | ✓ | × | × | × |
| Y. Xiao et al. [127] | 2018 | × | × | × | ✓ | × | × |
| Ateya e al. [128] | 2018 | ✓ | ✓ | ✓ | ✓ | × | × |
| S. Troia et al. [129] | 2018 | × | ✓ | ✓ | × | × | × |
| C. Grasso et al. [49] | 2018 | ✓ | × | × | × | × | × |
| Li et al. [130] | 2018 | ✓ | × | × | × | ✓ | × |
| M. Gharbaoui et al. [131] | 2018 | ✓ | ✓ | ✓ | × | × | × |
| Popovski et al. [47] | 2018 | ✓ | × | × | × | ✓ | ✓ |
| Chatras et al. [132] | 2017 | ✓ | × | ✓ | × | × | × |
| Yi-Wei Ma et al. [133] | 2017 | × | ✓ | ✓ | ✓ | × | × |
| T. Theodorouan et al. [134] | 2017 | × | ✓ | × | × | × | × |
| K. Wang et al. [135] | 2017 | × | ✓ | × | × | × | × |
| Ateya et al. [136] | 2017 | ✓ | × | × | ✓ | × | × |
| Feng et al. [137] | 2017 | ✓ | × | × | × | ✓ | × |
| Pilz et al. [138] | 2016 | ✓ | ✓ | × | × | ✓ | × |
| Athmiya et al. [139] | 2016 | × | ✓ | × | × | × | × |
| Intharawijitr et al. [140] | 2016 | ✓ | × | × | ✓ | × | × |
| Simsek et al. [141] | 2016 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Maier et al. [8] | 2016 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Tong et al. [142] | 2016 | ✓ | × | × | ✓ | × | × |
| N. Truong et al. [143] | 2015 | × | ✓ | × | ✓ | × | ✓ |
| P. Iovanna et al. [144] | 2015 | ✓ | ✓ | × | × | × | × |
| D. Szabo et al. [145] | 2015 | ✓ | ✓ | × | × | × | ✓ |
| F. Bonomi et al. [146] | 2011 | × | × | × | ✓ | × | × |
| Cuervo et al. [147] | 2010 | × | × | × | × | × |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fanibhare, V.; Sarkar, N.I.; Al-Anbuky, A. A Survey of the Tactile Internet: Design Issues and Challenges, Applications, and Future Directions. Electronics 2021, 10, 2171. https://doi.org/10.3390/electronics10172171
Fanibhare V, Sarkar NI, Al-Anbuky A. A Survey of the Tactile Internet: Design Issues and Challenges, Applications, and Future Directions. Electronics. 2021; 10(17):2171. https://doi.org/10.3390/electronics10172171
Chicago/Turabian StyleFanibhare, Vaibhav, Nurul I. Sarkar, and Adnan Al-Anbuky. 2021. "A Survey of the Tactile Internet: Design Issues and Challenges, Applications, and Future Directions" Electronics 10, no. 17: 2171. https://doi.org/10.3390/electronics10172171
APA StyleFanibhare, V., Sarkar, N. I., & Al-Anbuky, A. (2021). A Survey of the Tactile Internet: Design Issues and Challenges, Applications, and Future Directions. Electronics, 10(17), 2171. https://doi.org/10.3390/electronics10172171