1. Introduction
With the advent of IoT, the need for portable, and self-powered devices has been dramatically increasing. Batteries are still the most common way of powering embedded applications. Yet, due to their size, weight, impractical replacement, limited lifetime, and above all environmental impact, batteries tend to become unwelcomed in ultra-compact ultra-low power applications.
Harvesting energy from ambient background (solar, eolian, thermal, kinetic, etc.), has been a hot research topic over the last years. The goal is to do without batteries by implementing highly efficient dynamic power generators. In particular, the literature reports many implementations of kinetic harvesters involving piezoelectric devices Çiftci et al. [
1], Chen et al. [
2], Du and Seshia [
3], Sanchez et al. [
4], inductive devices Rahimi et al. [
5], and electrostatic (capacitive) devices Tao et al. [
6], Stanzione et al. [
7].
Piezoelectric energy harvesters (PEH) are among the most investigated and popular kinetic energy harvesting systems, first because of the wide availability of ambient vibration sources, and second because they can achieve relatively high power density, i.e., from tens to several hundreds of microwatts per cubic centimeter, compared to the capacitive or inductive conversion principles. Moreover, they are easy to combine with conventional integrated circuit technologies Stanzione et al. [
7].
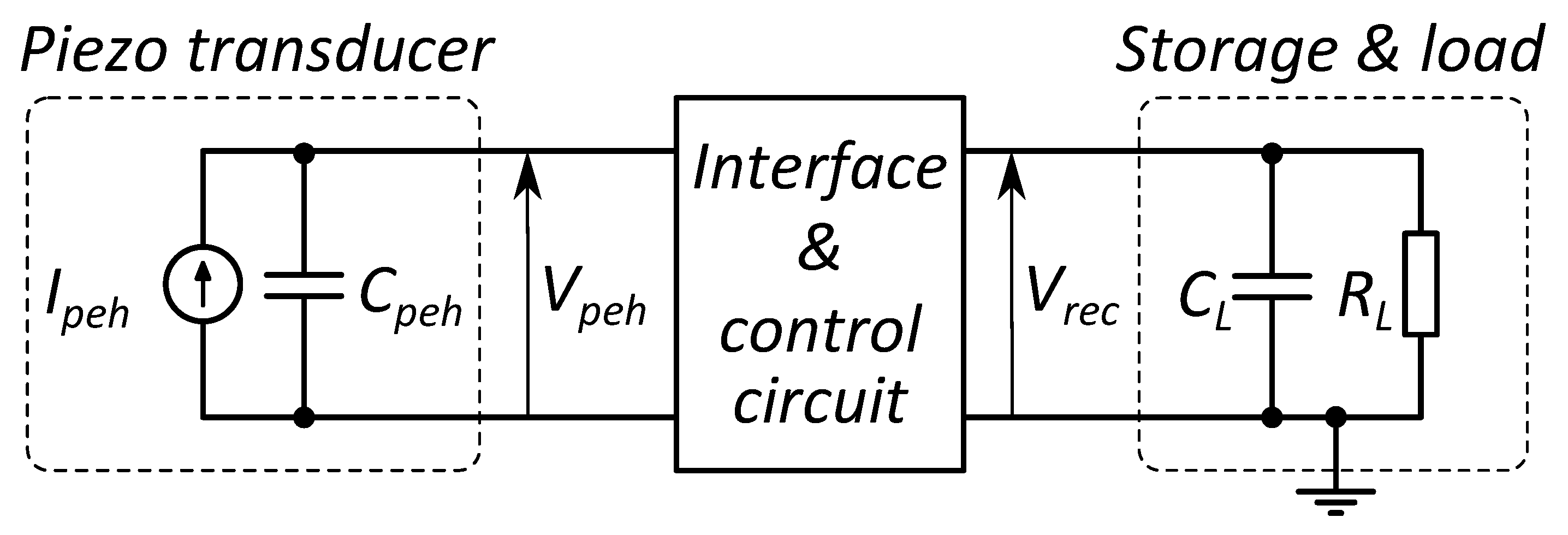
Figure 1 shows the basic topology of a PEH system. It breaks down into three core parts: (1) A piezoelectric transducer (PT). (2) An interface and control circuit (IC). (3) Storage and load elements.
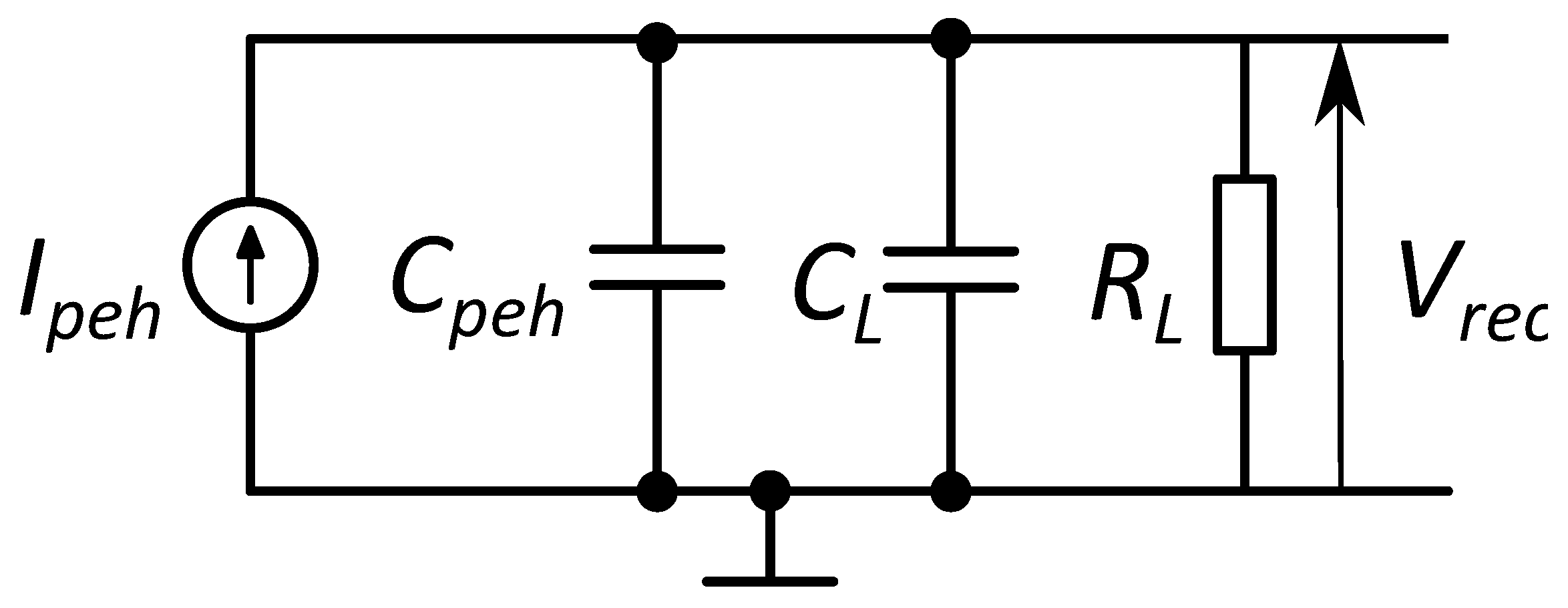
Thanks to the piezoelectric properties of its material, the PT turns the mechanical energy into electrical energy. The equivalent electrical model of the PT consists in the parallel combination of an AC current source, which provides the current proportional to mechanical excitation, with an inherent piezoelectric capacitor . The storage element can be a supercapacitor , and the load is usually modelled as a resistor . Note that may change dynamically according to the power requirements of loads such as sensors or wireless modules for instance. The main role of the interface circuit is to rectify the AC voltage of the PT, , and provide the system with stable voltage supply. Ideally, the voltage supply should be independent of the load but in practice, a change in the value of can strongly affect the power efficiency of the harvester.
The most common interface circuit for rectifying
is a Full-Bridge Rectifier (FBR). Yet, the voltage drop across the rectifying diodes makes the FBR unsuitable for low-voltage PT (i.e.,
in the 1 V range or below). In order to circumvent the diodes’ threshold issue, Herbawi et al. [
8] proposed the principle of active rectification that uses a negative voltage converter (NVC) combined to a series-connected active diode (AD) instead of the FBR Peters et al. [
9]. The NVC acts like an FBR but uses transistors instead of diodes, thus yielding lower voltage drop across the rectifier. The AD prevents
-to-PT current backflow.
Furthermore, the combination of the inherent capacitor
in parallel with
causes
and
to be normally in phase quadrature. This contributes to further dramatically hamper FBR efficiency because
needs to discharge and recharge at each zero-crossing moment of
. Numerous interface topologies and architectures have been proposed to improve power efficiency by applying nonlinear synchronous switching Richard et al. [
10]. All these architectures use external devices, i.e.inductor and/or capacitor, to handle the charge of
. Synchronous Electric Charge Extraction (SECE) consists in extracting the energy accumulated in
by transferring it into an inductor, which in turn transfers it into the storage device Hehn et al. [
11], Dini et al. [
12], Shi et al. [
13], Morel et al. [
14,
15]. SECE alleviates the load dependency of the system but requires a bulky inductor and tends to have degraded performance for periodic excitation of PT. Synchronized Switch Harvesting architectures reuse the own charge of
to invert the polarity of
upon
zero-crossing. They employ either an inductor (SSHI) (Sanchez et al. [
4], Du et al. [
16], Ramadass and Chandrakasan [
17], Wu et al. [
18], Chamanian et al. [
19,
20]) or a set of capacitors (SSHC) (Chen et al. [
2], Du and Seshia [
3], Chen et al. [
21], Hong et al. [
22]) to store the charge of
temporarily before sending it back once the electrodes of the PT have been swapped. Architectures combining both an inductor and a capacitor have also been reported in Çiftci et al. [
23] and Çiftci et al. [
1]. Synchronized-switch-based architectures globally achieve better power efficiency than SECE for both shock and periodic excitation. According to Ramadass and Chandrakasan [
17], full voltage flip of
could theoretically allow very high (i.e., infinite) efficiency. Yet, in practice the characteristics of the components strongly limit the voltage flip efficiency, and
still needs to provide
with complementary charge prior to transferring energy from the PT to
and
. Moreover, SSHC and SSHI architectures have load-dependent performance, which means that the power efficiency strongly depends on changes in
and/or the excitation’s amplitude. Çiftci et al. [
1] proposed a circuit that reduces the load-dependency of the power efficiency. But such systems require more complex control.
Therefore, there is a genuine interest in proposing an easy-to-implement synchronized switch architecture that both achieves high-efficiency voltage flip and is able to maintain fair power efficiency during transient changes of the load . Enhancing the voltage flip minimizes the charge needed by and thus allows to extract energy from the PT shortly after the voltage flip. This point is particularly critical in low-voltage systems, i.e., V, that harvest power in the tens of microwatts range.
In this paper, we demonstrate the benefit of a synchronized-switch-based architecture, referred to as full active rectifier (FAR) and first proposed in Wassouf et al. [
24], to alleviate the load influence of the piezoelectric energy harvester. The FAR is based on the SSHC concept that consists in flipping
by means of a capacitor, but has much simpler control and needs no additional capacitors. In terms of power performance, the FAR is similar to the Switch-only principle Ramadass [
25], and thus performs worse than state-of-the-art SSHI or SSHC. But it is important to note that, discussing raw absolute performance is not the point of this paper. The key result we propose here is the theoretical and experimental proof that thanks to the voltage flip enhancement, the FAR achieves better power efficiency under load constraint than Switch-only. It is yet also important to note that the proposed technique may be applied in addition to state-of-the-art voltage flip architectures that reuse the charge of
(i.e., SSHI and SSHC), and hence contribute to enhance their performance.
The paper is organized as follows:
Section 2 presents the enhanced voltage flip concept, the FAR IC topology, its operation principle, and provides a thorough analysis of charge loss and power performance compared to Switch-only.
Section 3 provides experimental results. Finally,
Section 4 concludes this paper.
2. Enhanced Voltage Flip
The voltage flip enhancement technique that we propose consists in recharging
with
. At first glance, the concept of reusing the stored charge may appear as counter intuitive but in this section, we demonstrate that it contributes to enhance the power efficiency of the harvester. At each zero-crossing instant of
, the piezo capacitor
is first shorted, and then immediately recharged with a fraction of the charge from the storage capacitor
Wassouf et al. [
24]. In the following sections, the proposed concept will be referred to as the FAR.
The concept is based on the use of a large storage capacitance
, which should be at least one order of magnitude greater than
. This can easily be admitted because storage capacitances have usually large values. As discussed in
Section 2.3, the concept also imperatively needs the rectified voltage
to be regulated, in order to ensure optimal power extraction of the proposed harvester.
For comparison purpose, because the FAR and the conventional Switch-only principle have a priori the same energy balance, we designed the FAR integrated circuit architecture presented below. This circuit allows to implement both FAR and Switch-only modes.
2.1. FAR IC Topology
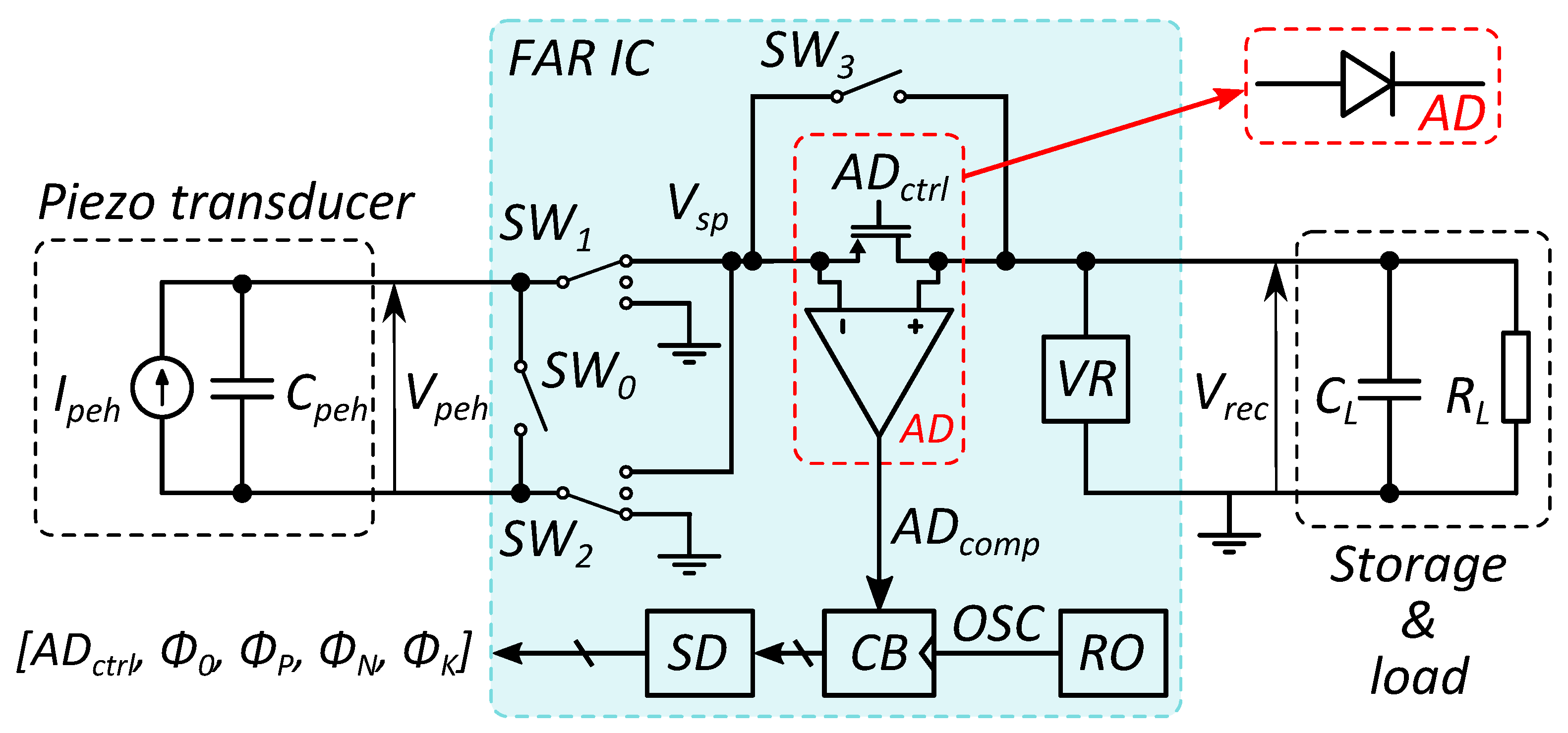
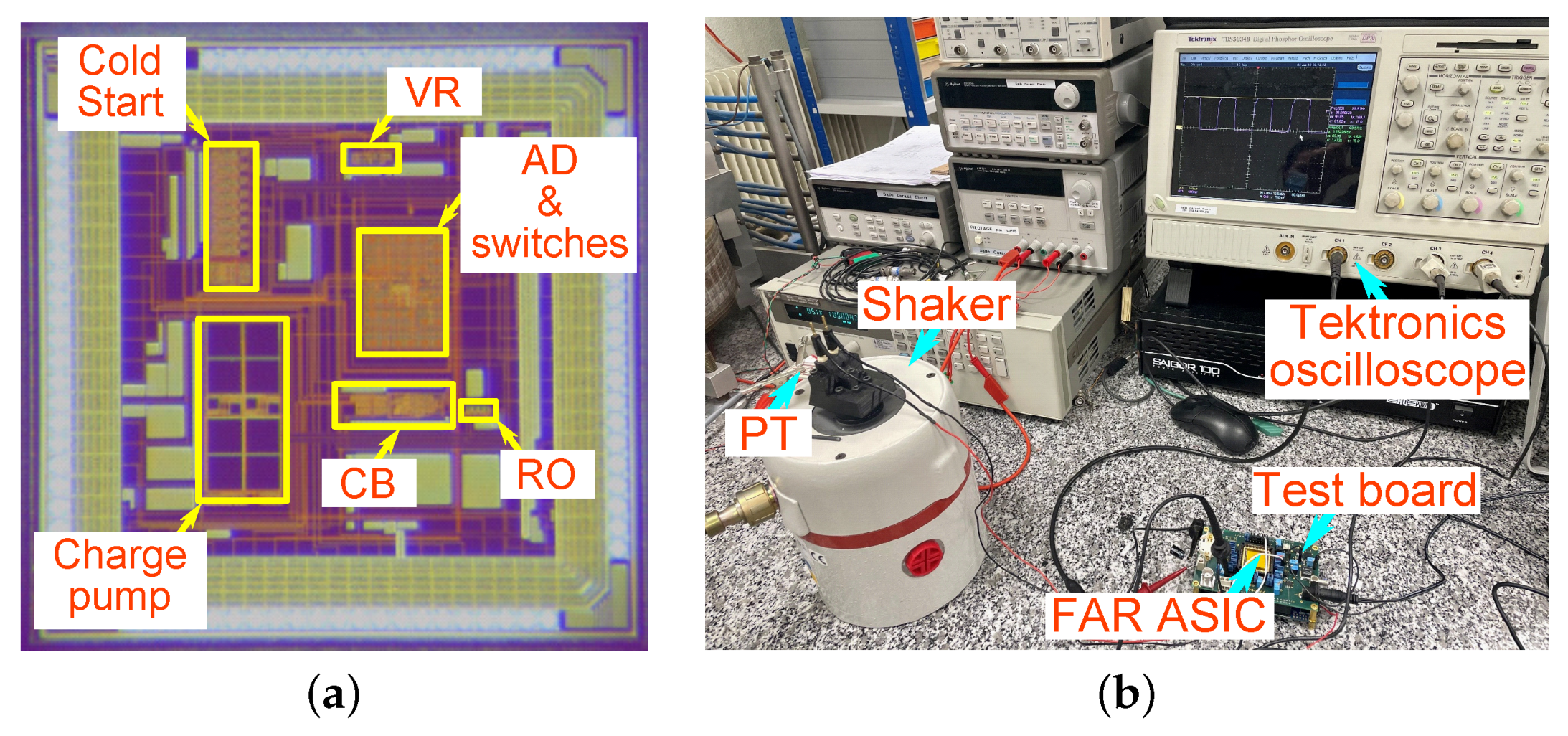
Figure 2 presents the topology of the FAR IC. A set of switches (
to
) consisting of transmission gates (TG) is connected to an active diode (AD) to form the rectifying part of the system. The logic control block (CB) of
Figure 3 performs the switching sequence described below. The circuit also features a voltage regulator (VR) Du and Seshia [
3], a ring oscillator (RO) Ferreira and Galup-Montoro [
26], and switch drivers (SD). The later include a charge pump Tsuji et al. [
27] and level shifters Du and Seshia [
3], Matsuzuka et al. [
28] that are needed to control the switches properly. Note that blocks VR, RO and SD are standard functions, which are largely documented in the state-of-the-art literature. Therefore, they are not further detailed in this paper.
The AD is used for both preventing the current from flowing back from
and detecting the zero-crossing moment of
. It comprises a PMOS switch and an ultra-low power comparator proposed in Du and Seshia [
3]. When the voltage at node
drops below the rectified output voltage
(
Figure 2), the PMOS switch of AD is turned off, and the voltage flip operation is triggered as explained below.
2.2. FAR Operation Principle
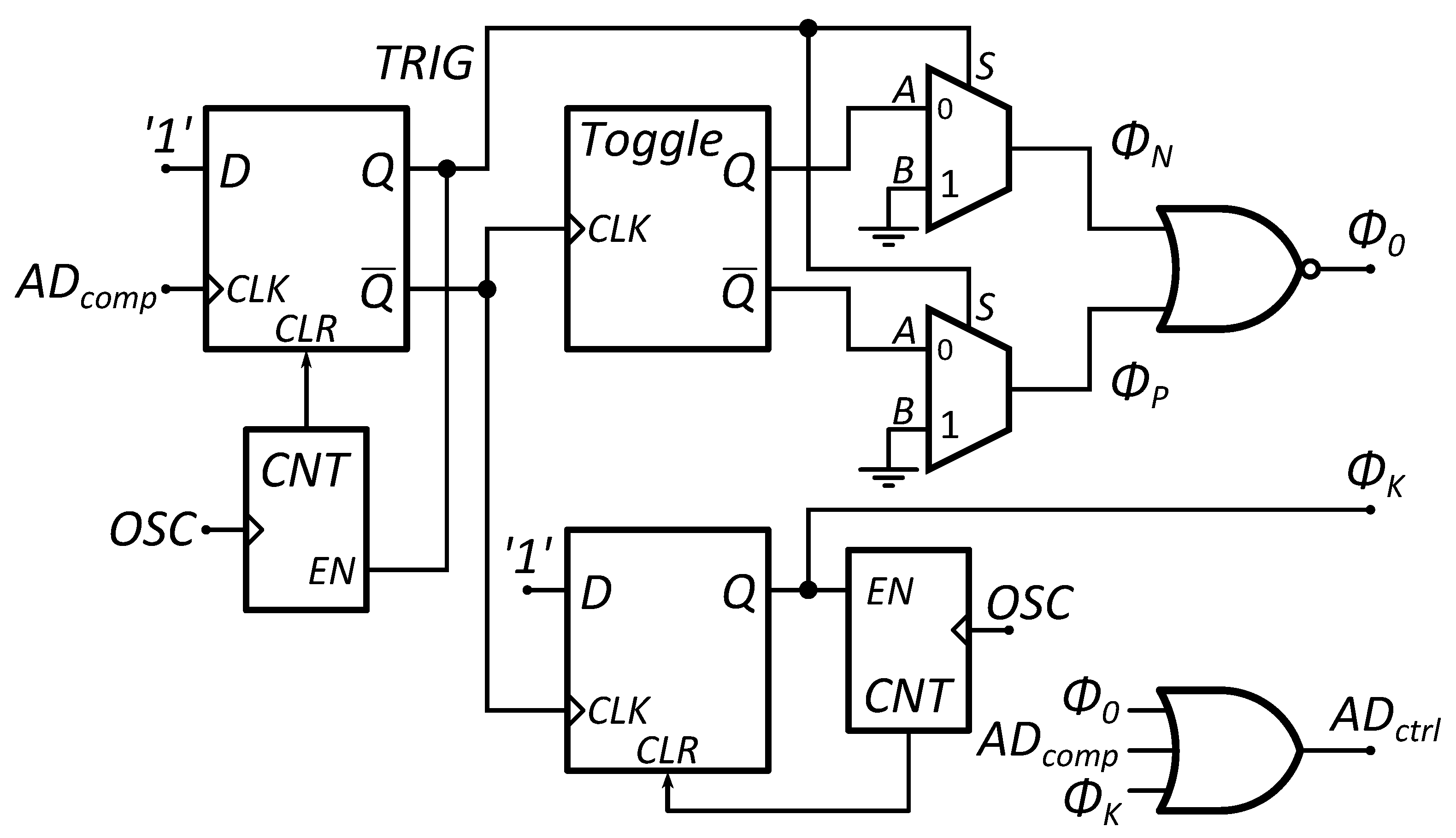
The zero-crossing of causes the AD’s comparator output signal to go high. triggers the signal sequence generated by CB. The CB signals control in turn the AD and the switches to .
Figure 3 shows the architecture of CB. Signal
controls the PMOS switch of AD, signal
controls
, signals
and
both control switches
and
, and signal
controls
.
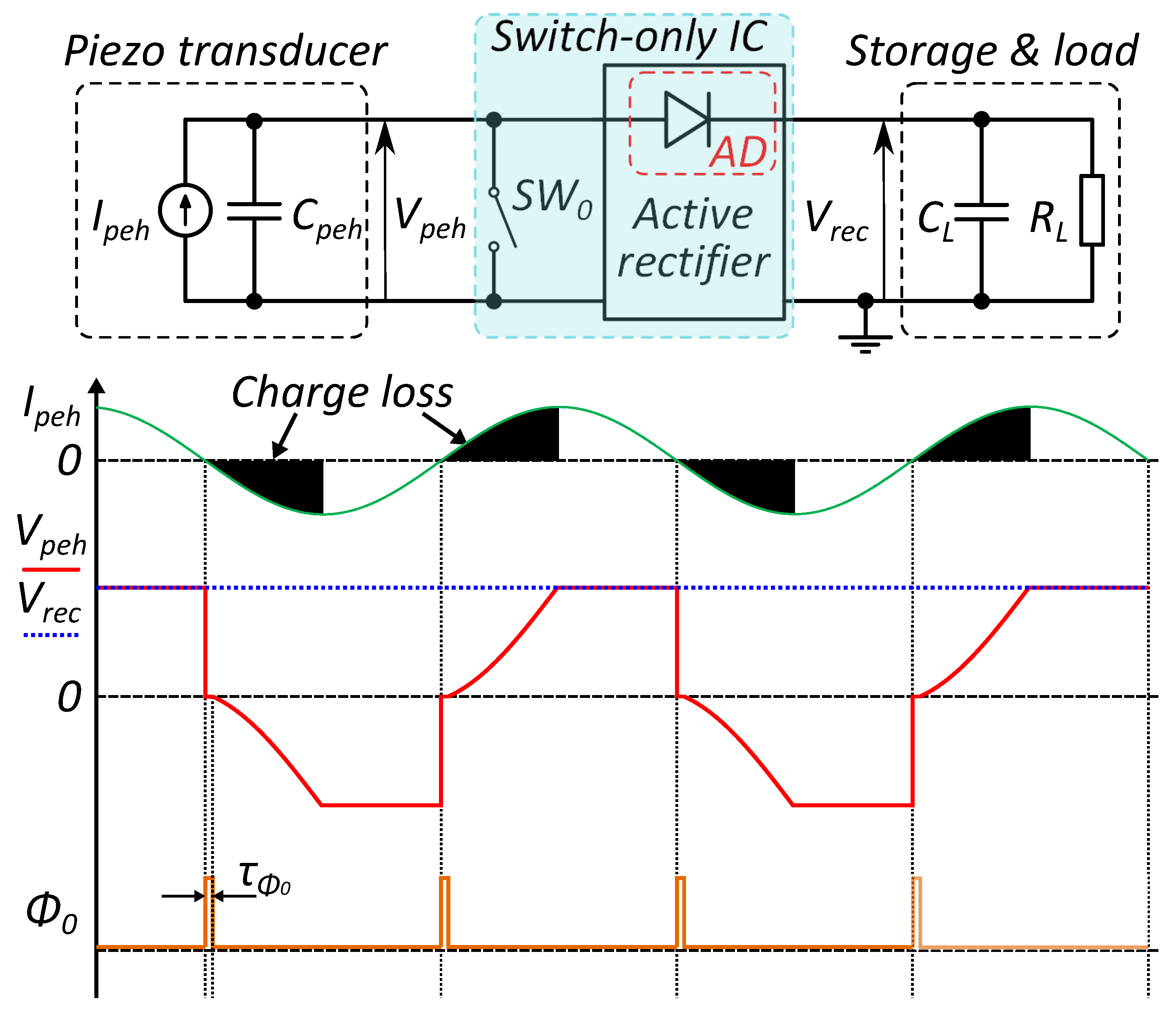
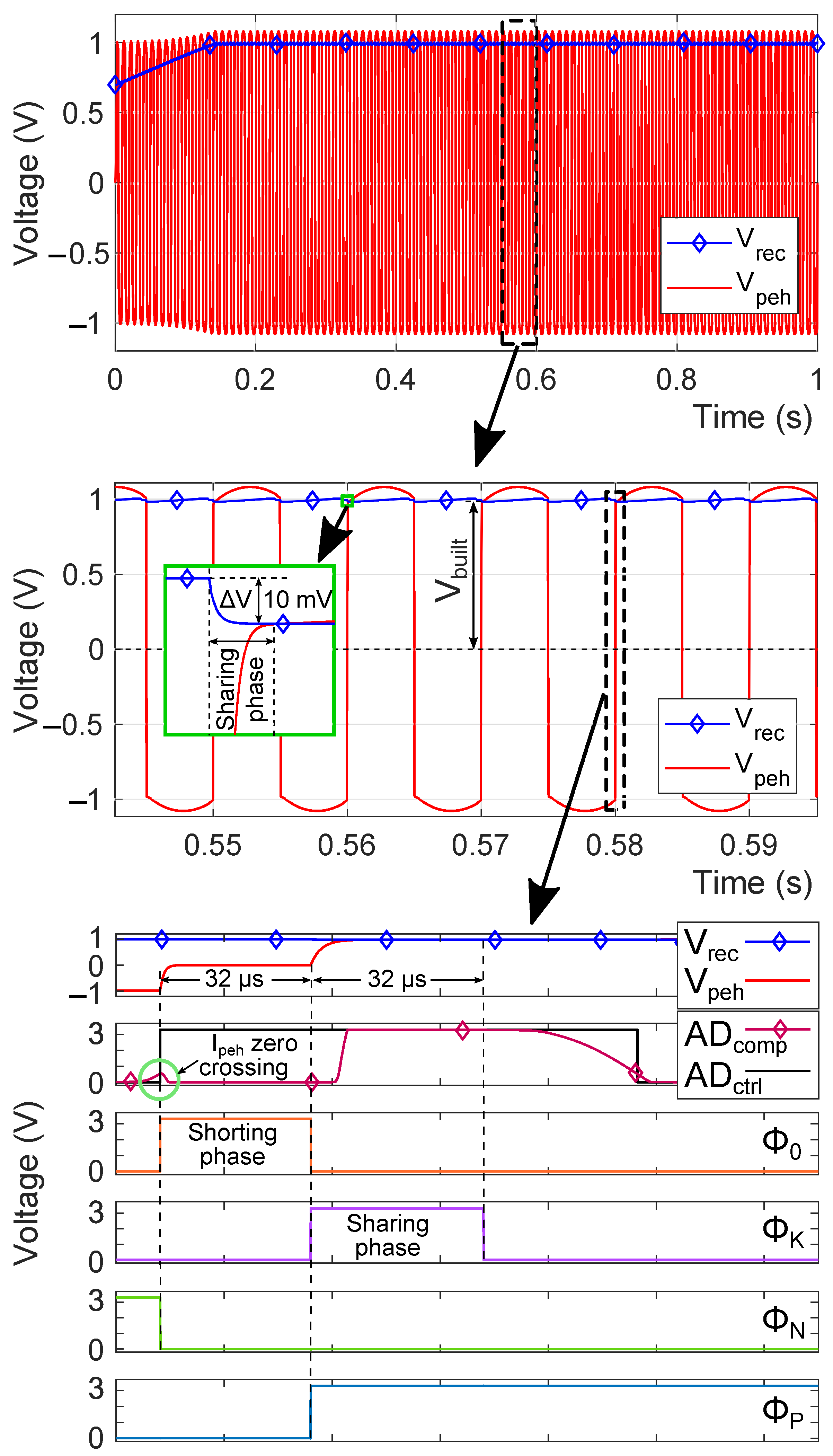
Figure 4 shows the sequence and its effect on the PEH’s voltages, while
Table 1 shows the operating scheme of the switches according to the control signals. It is worth noticing that the voltage flip operation is triggered by signal
and thus the control block auto-adapts according to the zero-crossing moment of
regardless of the PT’s excitation frequency
.
The operation of the FAR breaks down into 3 phases.
2.2.1. Shorting Phase
Signal
acts as the clock signal of a D flip-flop whose data input is set to a constant logic “high” state (
Figure 3). When
goes high, a trigger signal
turns on signals
and
simultaneously, which puts switches
and
in high impedance, i.e., off (
Table 1). In the meantime, signal
turns on
(
Figure 4), which shorts
. Signal
remains high until
is discharged. The duration of the shorting phase
depends on the value of
and the resistance of
. The TGs used to implement the switches have very low ON-resistance, typically around
. Assuming
nF, based on the off-the-shelf transducer characteristics (S118-J12S-1808YB,
Piezo.com, accessed on 1 September 2021) used in the experiments (
Section 3), the corresponding
time constant is thus
µs. The duration
is controlled by means of a counter (CNT in
Figure 3) clocked by the RO signal
. This signal is initially used to clock the charge pump used in the switch drivers, and has a frequency of 125 kHz. Therefore,
allows controlling
with 8 µs accuracy. In the proposed system, we used a modulo 4 counter, which thus yields
µs. This duration is largely sufficient to ensure complete discharging of
.
2.2.2. Sharing Phase
Once
is reset, i.e.,
goes high, a toggle sets either
or
to high depending on whether
is positive or negative, respectively. When
is high,
is connected to node
and
is connected to ground, and inversely when
is high (
Table 1). In the meantime,
goes high, which closes
and causes
to share its charge with
. During this sharing phase,
is in series with either
or
. Since all switches are implemented with the same TGs, the RC time constant is thus 3 µs. Therefore, we also used a modulo 4 counter (
Figure 3) to set the duration of the sharing phase
µs, which is also sufficient to complete the charge transfer.
At the end of the sharing phase, the value of
across
is
:
only depends on the charge
stored in
, the charge of
being
after the shorting phase. If
, then
, which is the value of
right before the voltage flip operation is triggered (see
Figure 4). Note that,
continuously increases as
charges.
2.2.3. Power Extraction Phase
Once
is recharged,
turns off while either
or
remains on, depending on whether
is negative (
high) or positive (
high), respectively (
Figure 4). Since the terminals of the PT are swapped by
and
at each phase inversion of
, this procudes the rectifying of
(i.e.,
). In this phase, the AD’s PMOS switch turns on as soon as
, which in turn connects the PT to
. As a result, most of the charges transfer directly from PT to
and
.
Note that the PMOS switch turns on very shortly after the sharing phase, since the voltage at node
is
as mentioned in
Section 2.2.2. This has significant consequence on the power efficiency as discussed in
Section 2.3.
2.3. Power Performance Analysis
If we suppose that
is a sine current source such as
where
represents the amplitude and
is the vibration frequency, then the expression of the open-circuit voltage
across the PT is given by:
with
the open-circuit amplitude. When
shifts from
to
, the total amount of charge generated by the PT in half a period is thus (Du and Seshia [
3], Ramadass [
25]):
where
.
2.3.1. With Infinite
The total charge loss breaks down into two main contributions: , lost by during the recharging of (sharing phase) and , the charge that goes to during the power extraction phase, i.e., when is in parallel with .
In steady state, when
reaches its maximum value
(
Figure 4) imposed by VR, the expressions for
and
are
where
represents the ripple of
caused by the recharging of
. The total charge loss is then
From (
1) and (
5), we may consider
provided that
. Therefore, we can consider that
fully recharges
, making
the principal charge loss (i.e.,
). We can thus express the total charge stored on
in half a period as
and then the total charge on a full period is then
.
Thus, the output power is given by
From (
9), we can deduce that the maximum power extraction is achieved when
, which corresponds to a maximum power
This result shows that the power efficiency is inherently load-dependent because applying a finite value load
affects
, as it would for any synchronized switch harvesting system ( Çiftci et al. [
1], Chen et al. [
21], Du et al. [
29]) and suggests VR should regulate
to
(Ramadass and Chandrakasan [
17]). Moreover, it is identical to Switch-only, the architecture and signals of which are presented in
Figure 5.
When
is infinite and
is regulated to
, the amount of charge needed to recharge either
(FAR) or
(Switch-only) is
. Yet, energy harvesting systems are meant to supply a finite value load with charges delivered by
and PT. As demonstrated in the next section and in
Section 3.2, the proposed FAR architecture has an impact on the power performance when
has finite value. Furthermore, since FAR and Switch-only have the same power performance a priori, we compared both architectures.
2.3.2. With Finite
Figure 6 shows the equivalent electrical model of the PEH during the power extraction phase (i.e., AD is “ON”), when
has a finite value. Note that this model assumes the series resistances of the switches and ADs are negligible, which is realistic considering
is around several tens of kilo-ohms as discussed below. The expression of
is given by:
where
and
K is the initial condition constant such as
, considering
s corresponds to the zero-crossing moment of
. Equation (
11) applies for
lower than
. When
reaches
, it is regulated to this value by VR.
Figure 7a shows
for the FAR architecture (
) simulated on half a period of
when applying a finite load
at
s. The parameters of PT are:
nF and
A, and the excitation frequency is
Hz. This corresponds to
V. The load is
k
, and
K is set so that
, which is the value of
when
at the zero-crossing moment of
(See
Section 2.2.2).
In the Switch-only architecture, the evolution of
breaks down into two phases. First, its AD is “OFF” and
recharges, while in the meantime,
discharges into
. Therefore, in this phase,
and
evolve separately. On the one hand, the expression of
is
where
is the initial value of
at the zero-crossing moment of
. On the other hand, the expression of
is
The second phase of
for the Switch-only starts when AD is “ON” (i.e.,
). In this phase, the equivalent schematic of the Switch-only architecture is exactly the same as for the FAR (cf.
Figure 6). Therefore, the expression of
is deduced from (
11) but with an offset
:
This offset
is induced by the decay of
during the first phase of Switch-only. Furthermore, just as for the FAR architecture, when
reaches
, it is regulated by VR.
Figure 7b shows
for the Switch-only architecture (
) simulated with the same parameters as for the FAR simulation presented in
Figure 7a. Note that, for Switch-only
V.
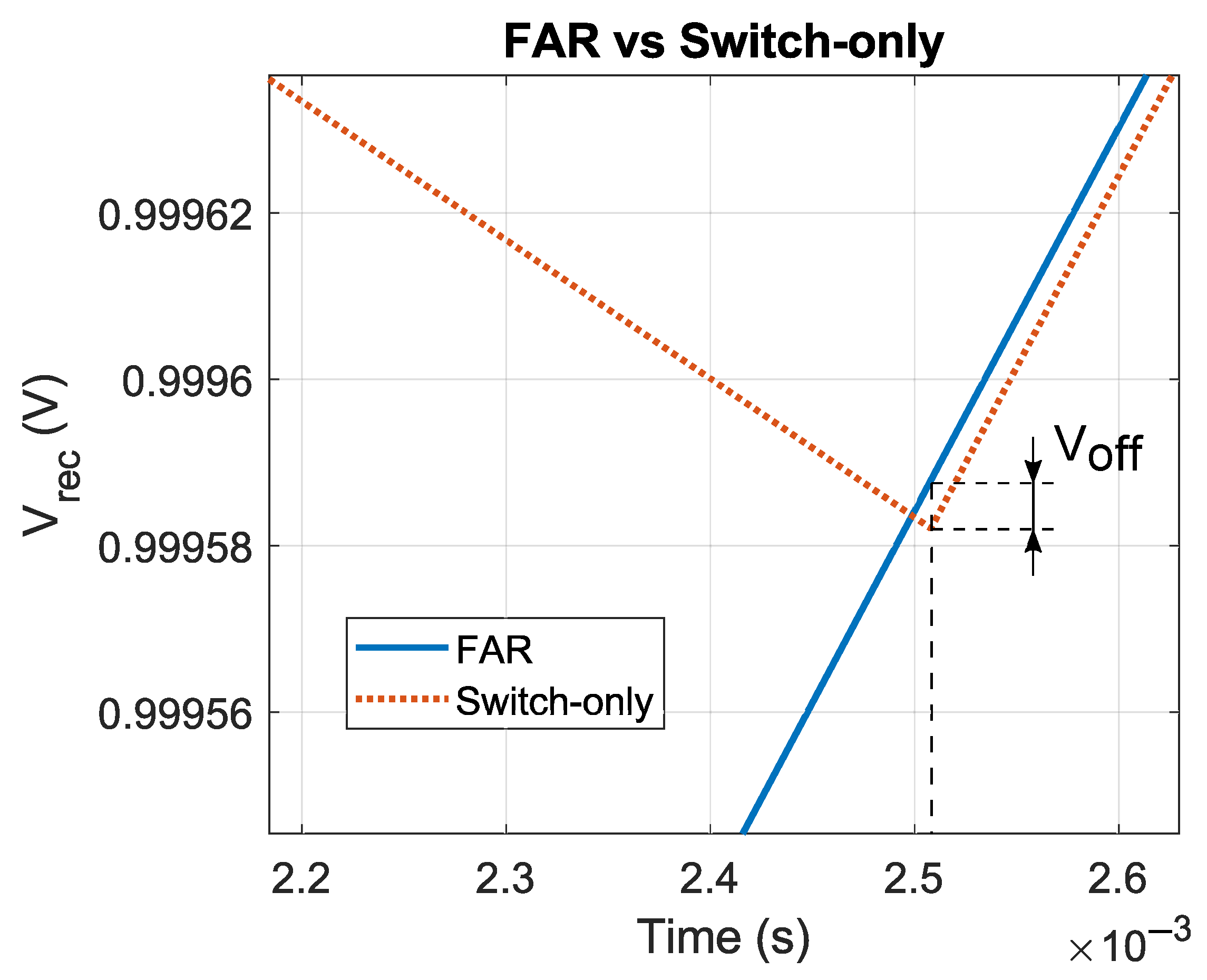
To establish whether
is positive or negative, i.e., which one yields the greater value (
11 or
14, FAR or Switch-only), we first needed to find the moment
when
of Switch-only caught up with
, which corresponds to the moment when AD turns “ON”:
Note: there is no analytic expression to solve (
15). Therefore, to evaluate
we need to apply a numerical method, such as Newton–Raphson ( Conejo and Baringo [
30]). The value
is then injected into (
14) to determine
so that Equations (
12)–(
14) yield the same value. Numerical simulations (
Figure 8) reveal that, whatever the values of the parameters in (
11) and (
14),
, which means that for
,
.
This result has significant consequences for the power efficiency of the systems as
evolves. More specifically, from (
11) we found the limit value
of
for which
reached
at
. Applying
in (
14) yielded
. Since the value of
set the initial conditions of
for the next half period of
, we verified that for
, the average value of
decreased to compensate for the presence of
while the average value of
remained constant. More generally, when
,
decreased in both architectures,
decreased faster and, more importantly, stabilized to a lower value than
. Note that, for either architecture,
adjusted to a steady-state average value that depended on the amount of energy the harvester transfered from the PT to
. This amount was lower in Switch-only because the power extraction phase was shorter than in FAR. Furthermore, the value of
only affected the evolution speed of
when
changed. The faster decreasing speed of
cames from the smaller time constant
when the ADwas “OFF” (see
12). The same reason explains why
stabilized at a lower value than
.
Figure 9 shows the numerical simulations of both architectures with
k
and the same initial conditions as above. We noticed that
stabilized around 3 mV below
.
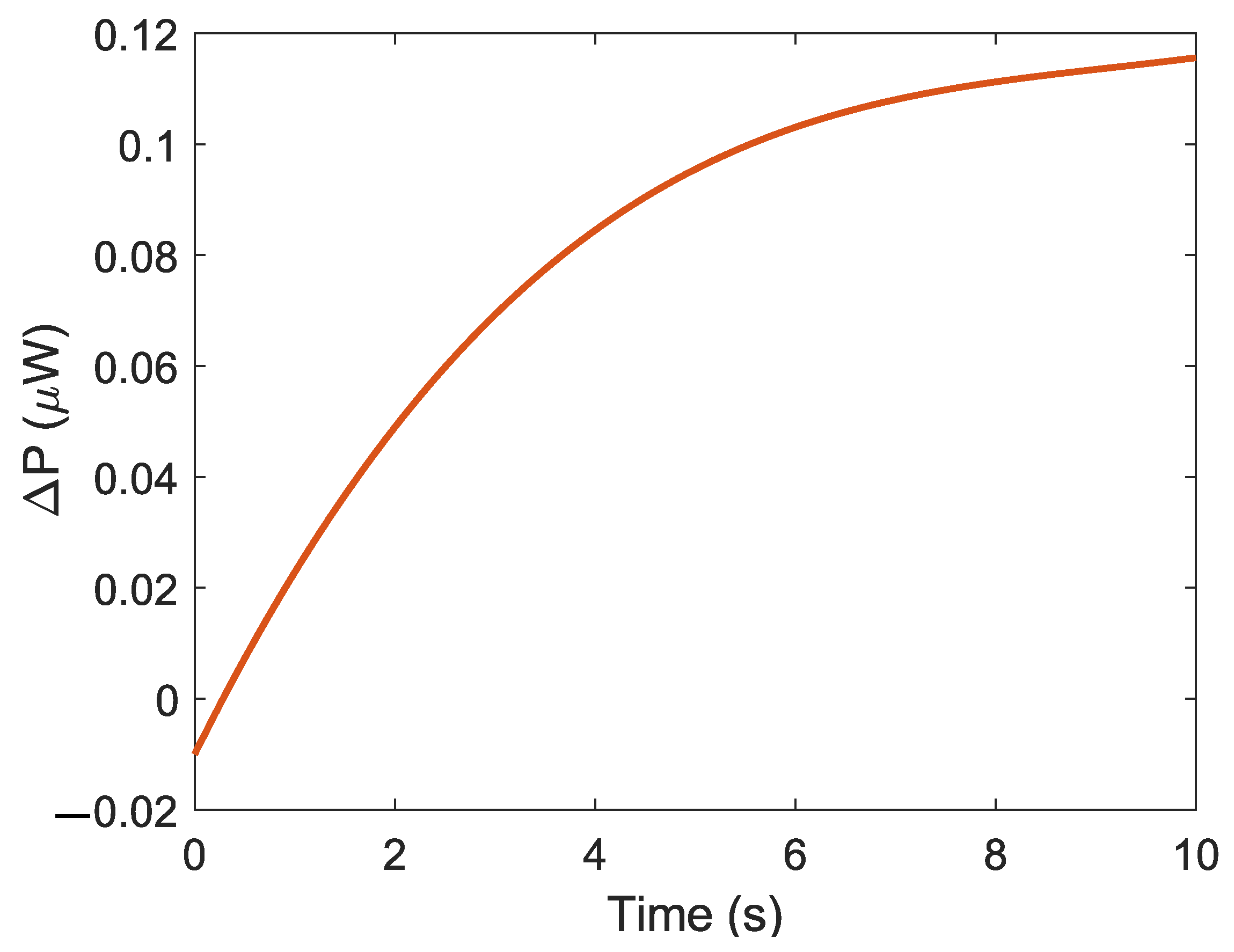
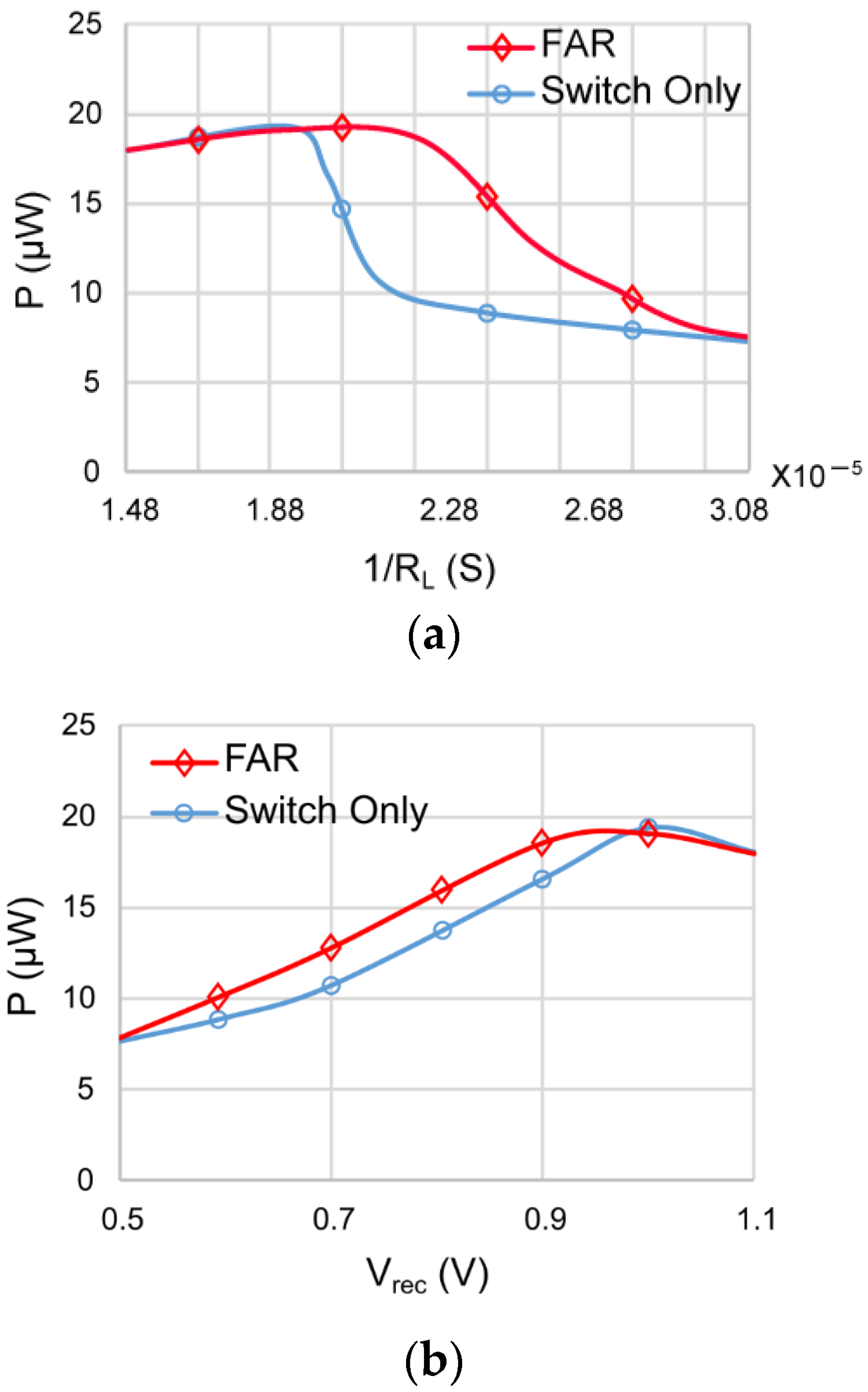
For power, FAR was also more efficient than Switch-only once
had been stabilized.
Figure 10 shows the average power difference
between FAR and Switch-only. It is worth noticing that at
s, i.e., before and shortly after applying
, Switch-only achieved slightly better power performance than FAR (
). This was due to the fact that without
, the FAR principle yielded lower average values of
. However, energy harvesting systems are not just meant to charge a storage device; they are intrinsically designed to supply energy to a load. Therefore, as shown here in the FAR implementation, there was a benefit in using voltage flip enhancement to improve power performance.
Furthermore, we believe that combining the voltage flip enhancement principle to SSHI or SSHC might contribute to further improve the power performance under load constraint. But for the time being, this statement is based on theoretical assumptions and needs to be further investigated.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}