Design of a Resonant Converter for a Regenerative Braking System Based on Ultracap Storage for Application in a Formula SAE Single-Seater Electric Racing Car

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
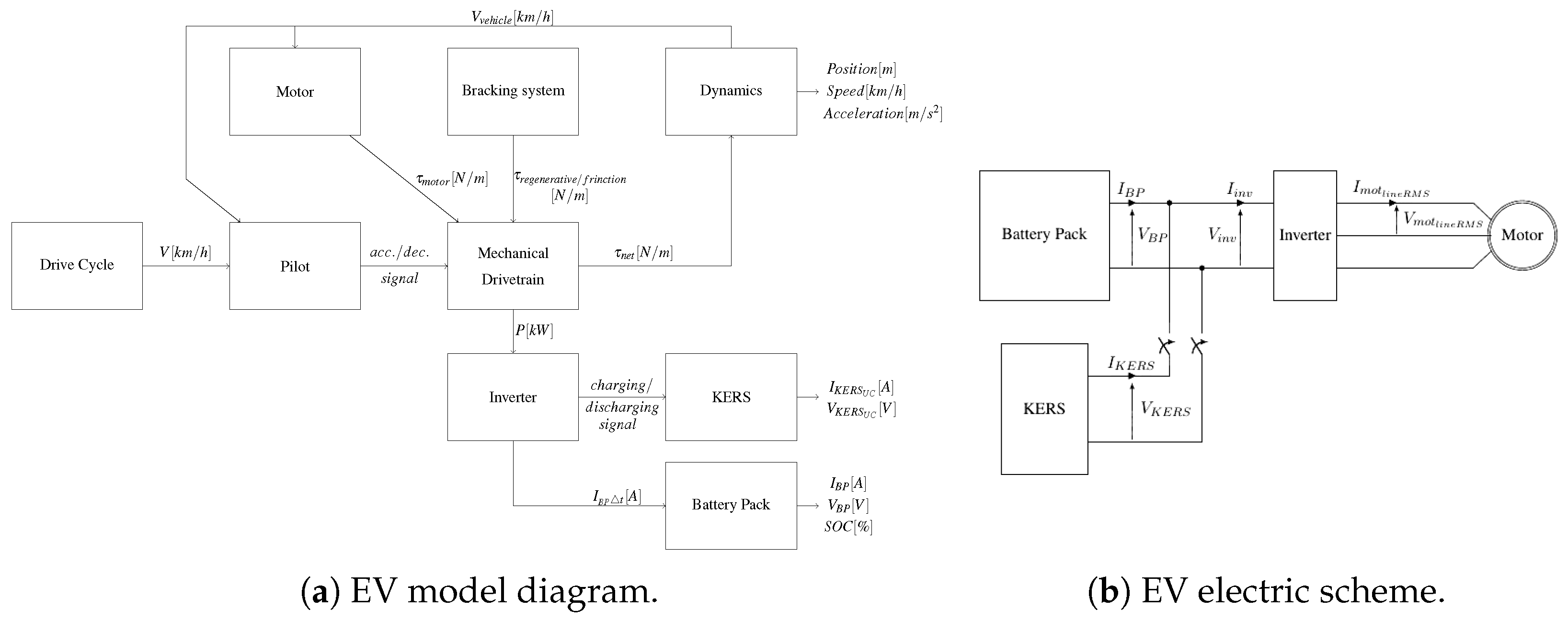
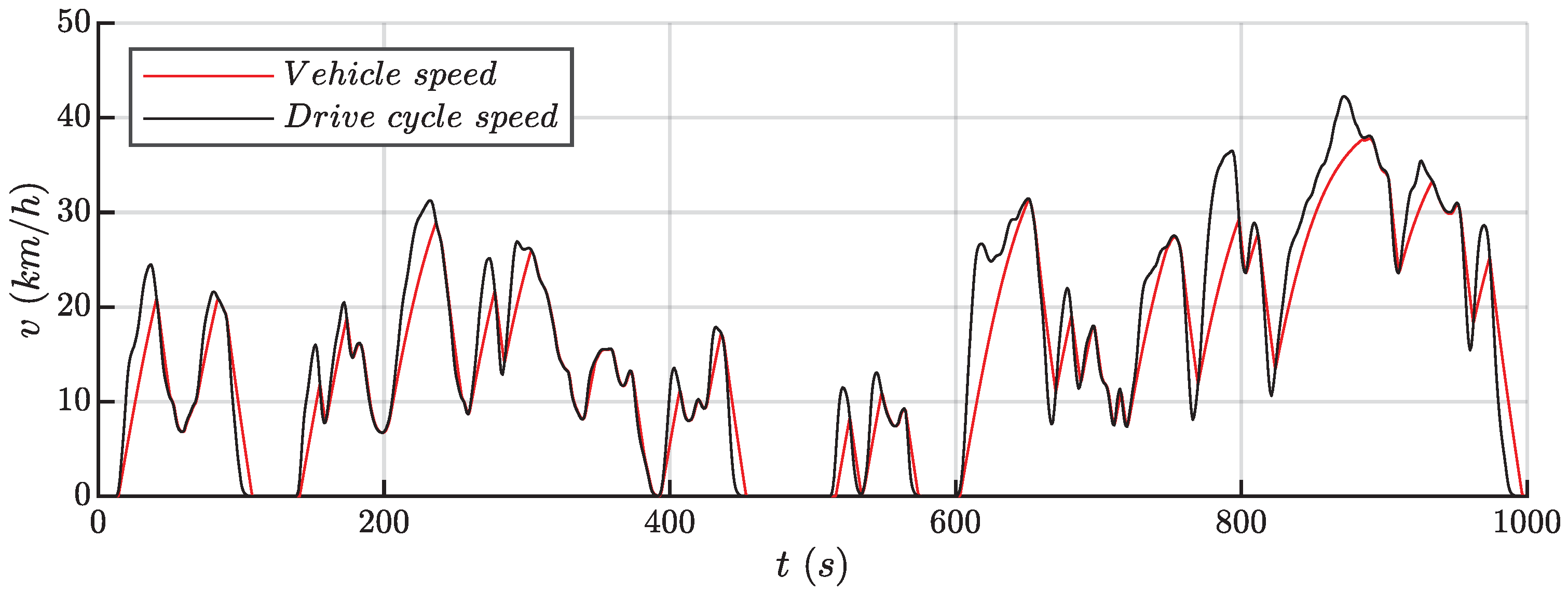
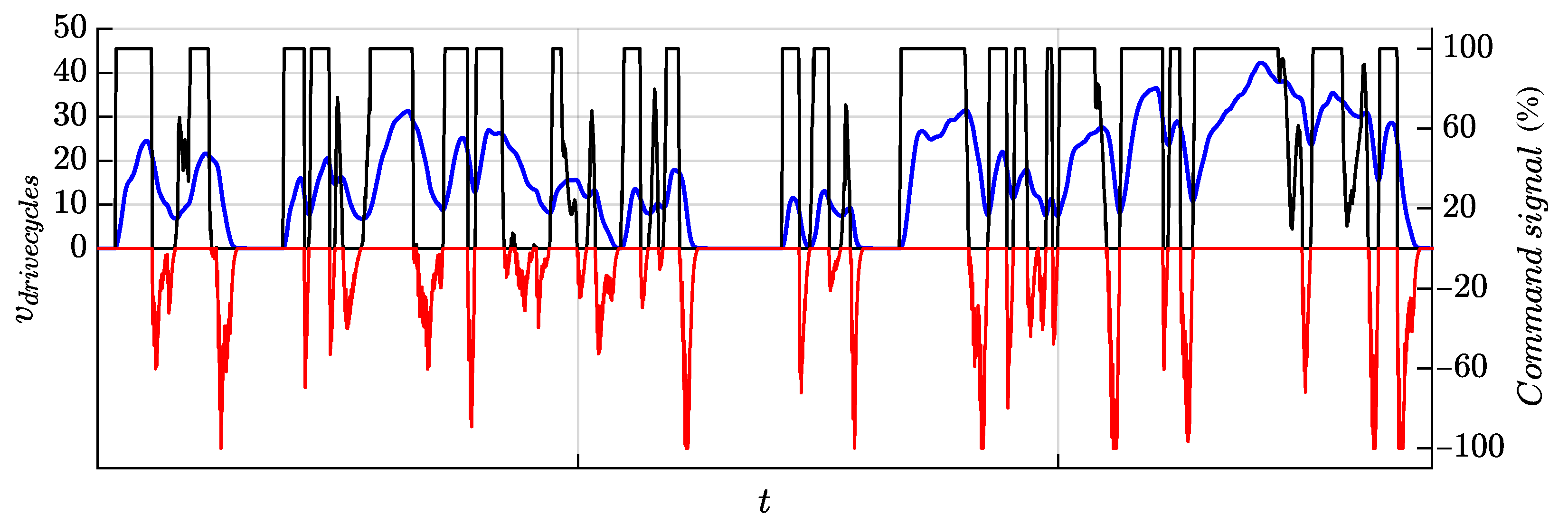
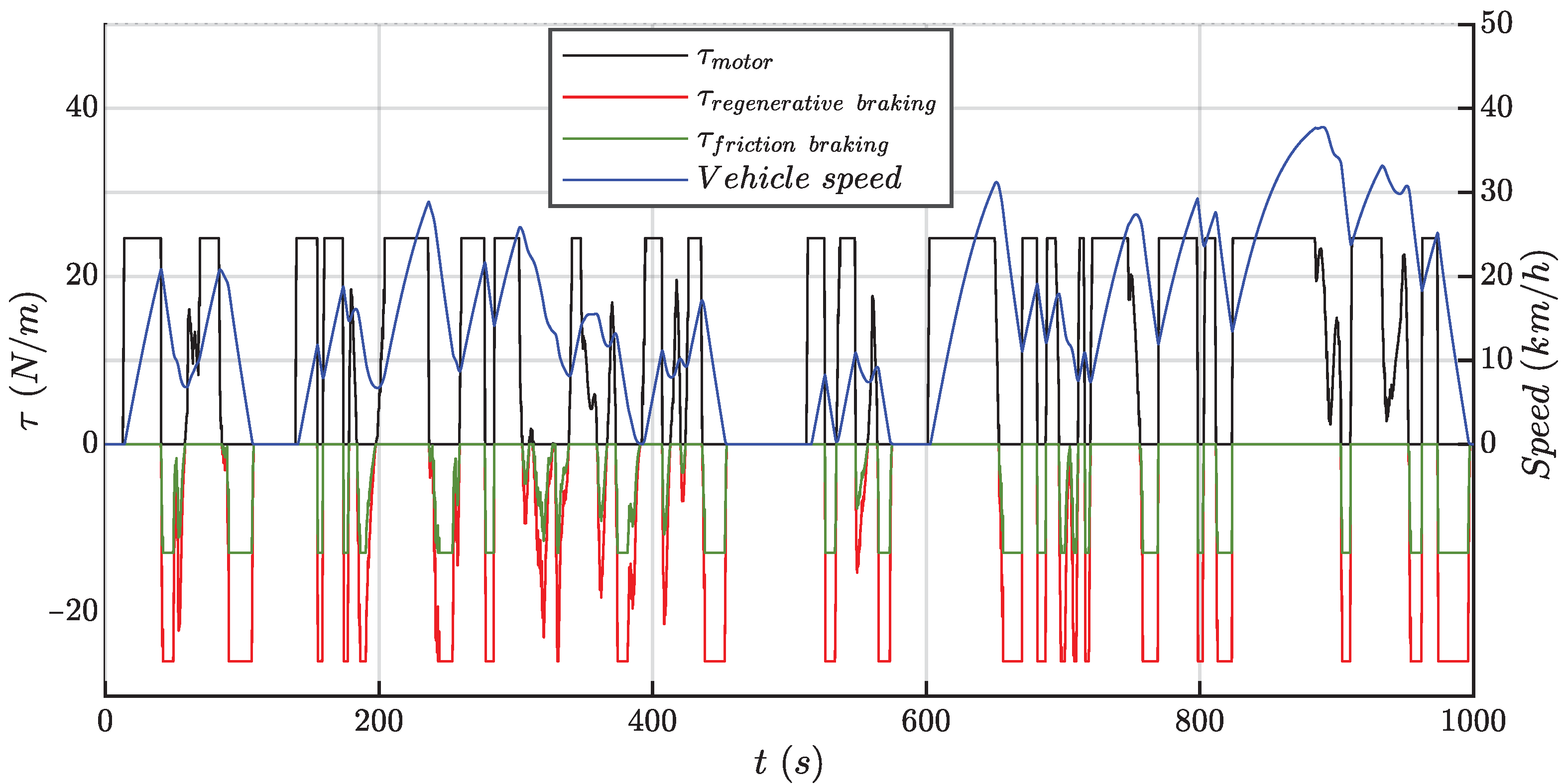
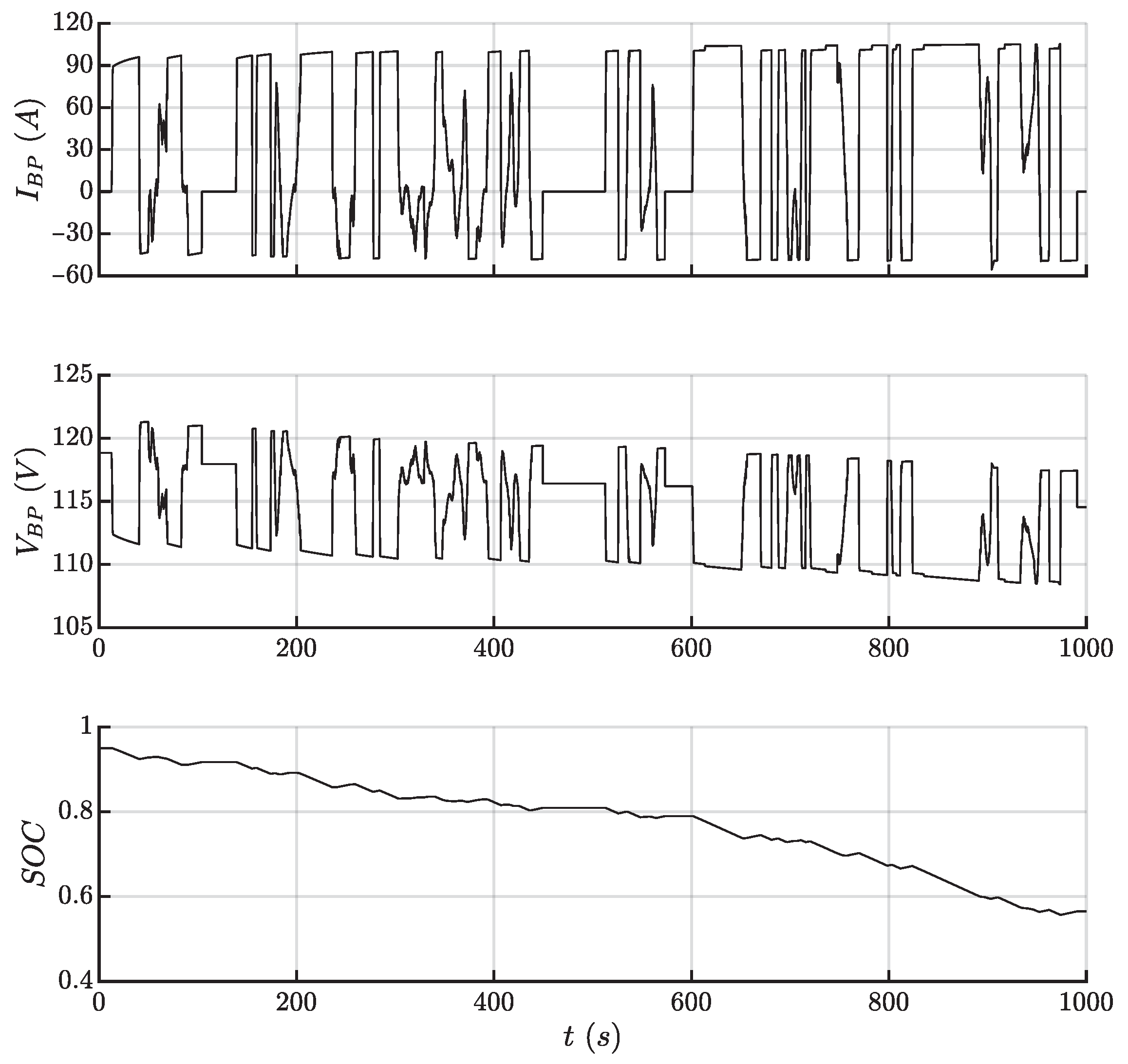
2. Formula SAE Electric Single-Seater Electric Racing Car Model
3. KERS Converter
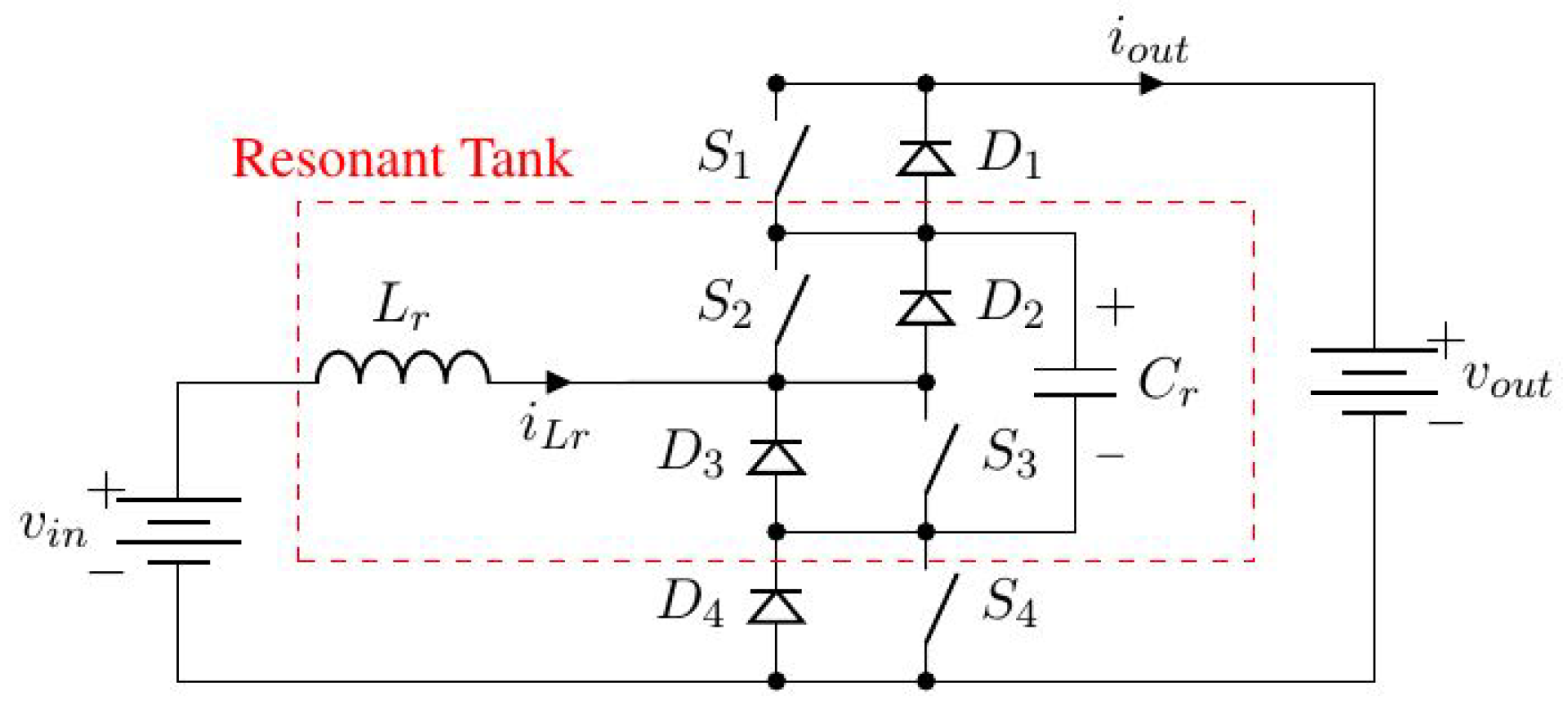
3.1. Topology Analysis
- the converter is analyzed in the steady state;
- the switches and the diodes are treated as being ideal;
- losses in the inductive and capacitive elements of the resonant tank are neglected;
- the voltages at the input and output terminals are assumed to be constant.
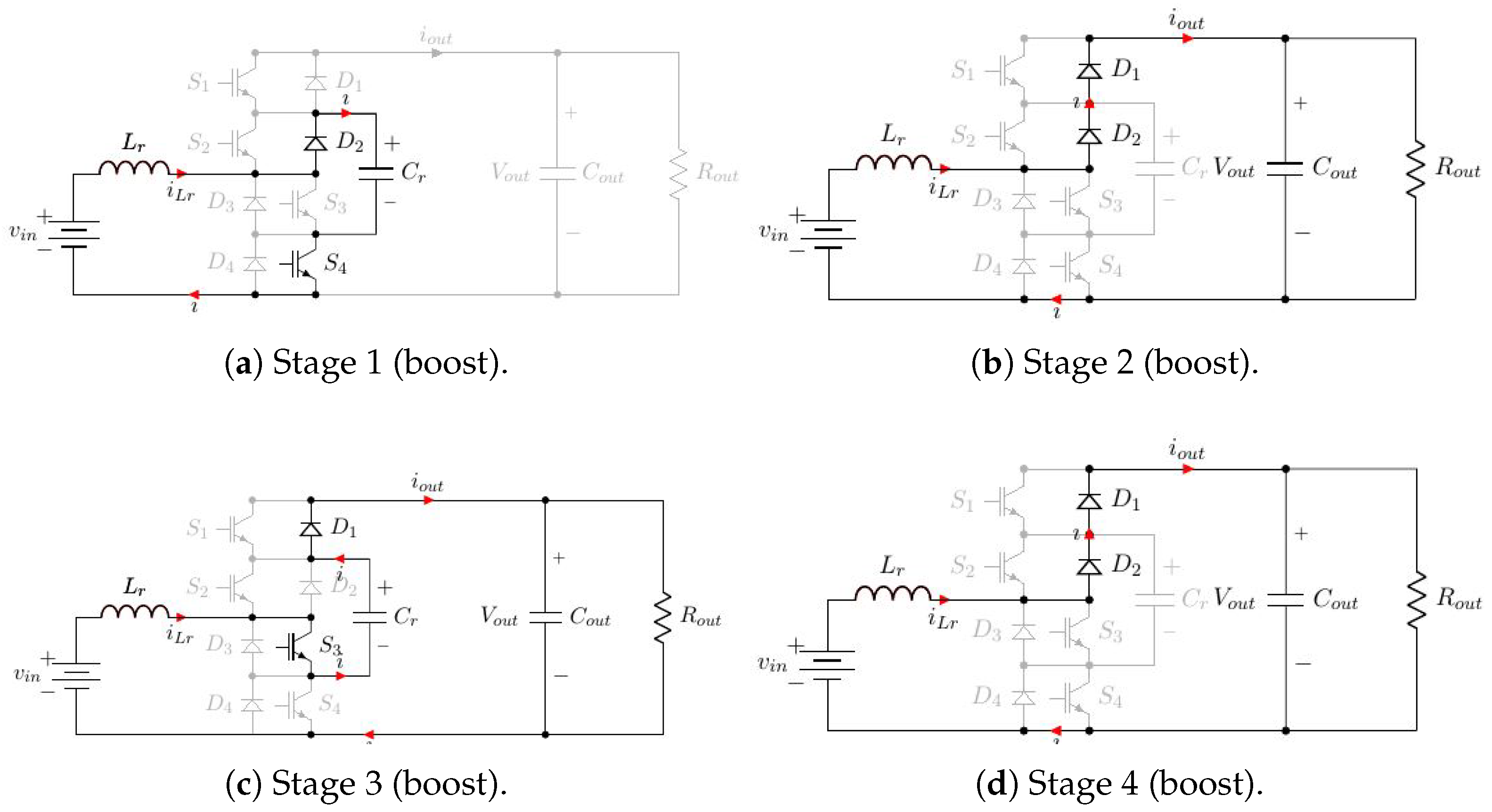
3.1.1. Boost Analysis
- the resonant tank capacitor and the resonant tank inductor are uncharged;
- turns off, and turns on;
- results in forward bias, and results in reverse bias.
- is equal to , and is equal to ;
- is still off, and is still on;
- is still forward biased, and results in forward bias.
- has just reached zero, and is clamped at ;
- is still off, and is still on;
- results in reverse bias, and is still forward biased.
- is equal to , and is equal to zero;
- turns on, and turns off;
- results in forward bias, and results in reverse bias.
- is equal to zero, and is equal to ;
- is still off, and is still on;
- is still forward biased, and results in forward bias.
- has just reached zero, and is zero;
- is still off, and is still on;
- results in reverse bias.
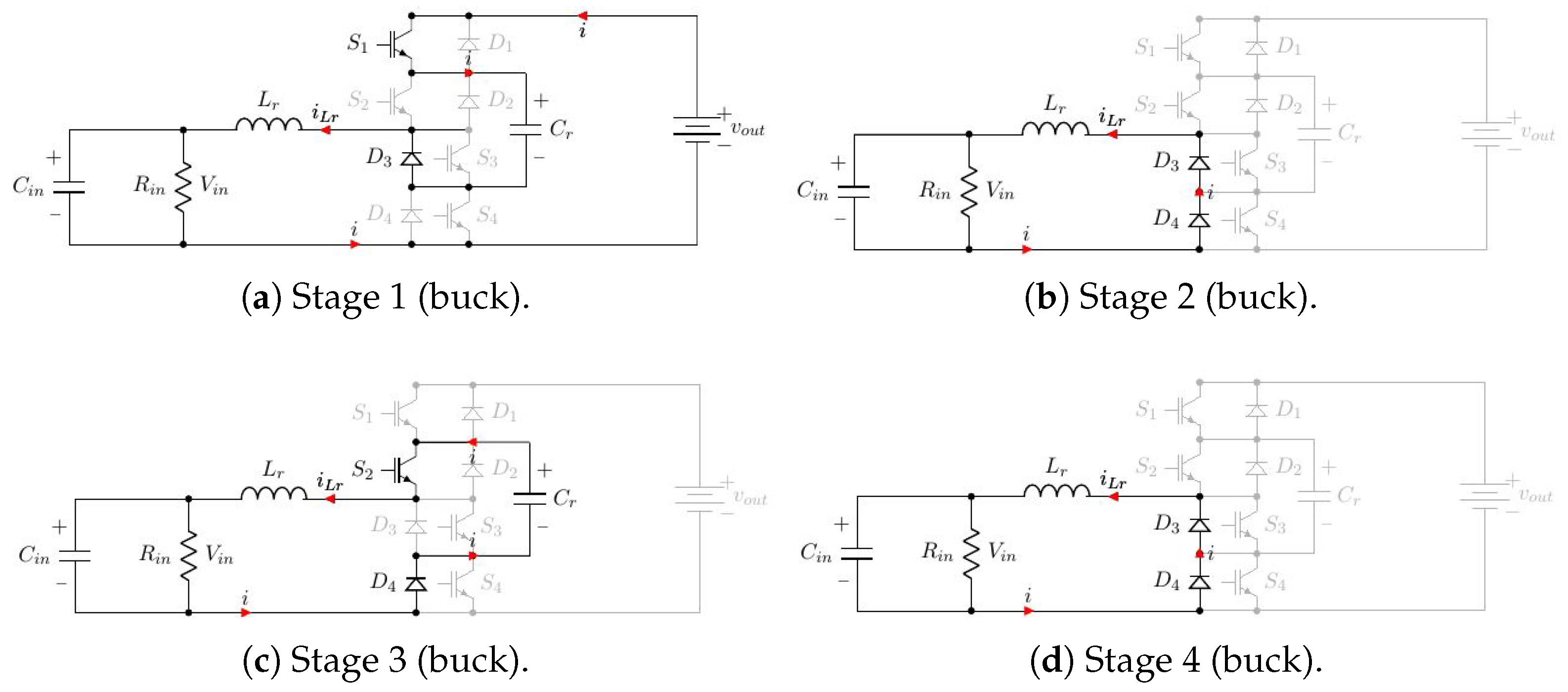
3.1.2. Buck Analysis
- is equal to zero, and is equal to zero;
- turns off, and turns on;
- results in forward bias, and results in reverse bias.
- is equal to , and is equal to ;
- is still off, and is still on;
- is still forward biased, and results in forward bias.
- has just reached zero, and is clamped at ;
- is still off, and is still on;
- results in reverse bias, and is still forward biased.
- is equal to , and is equal to zero;
- turns on, and turns off;
- results in forward bias, and results in reverse bias.
- is equal to zero, and is equal to ;
- is still off, and is still on;
- is still forward biased, and results in forward bias.
- is equal to zero, and is equal to zero;
- is still off, and is still on;
- results in reverse bias.
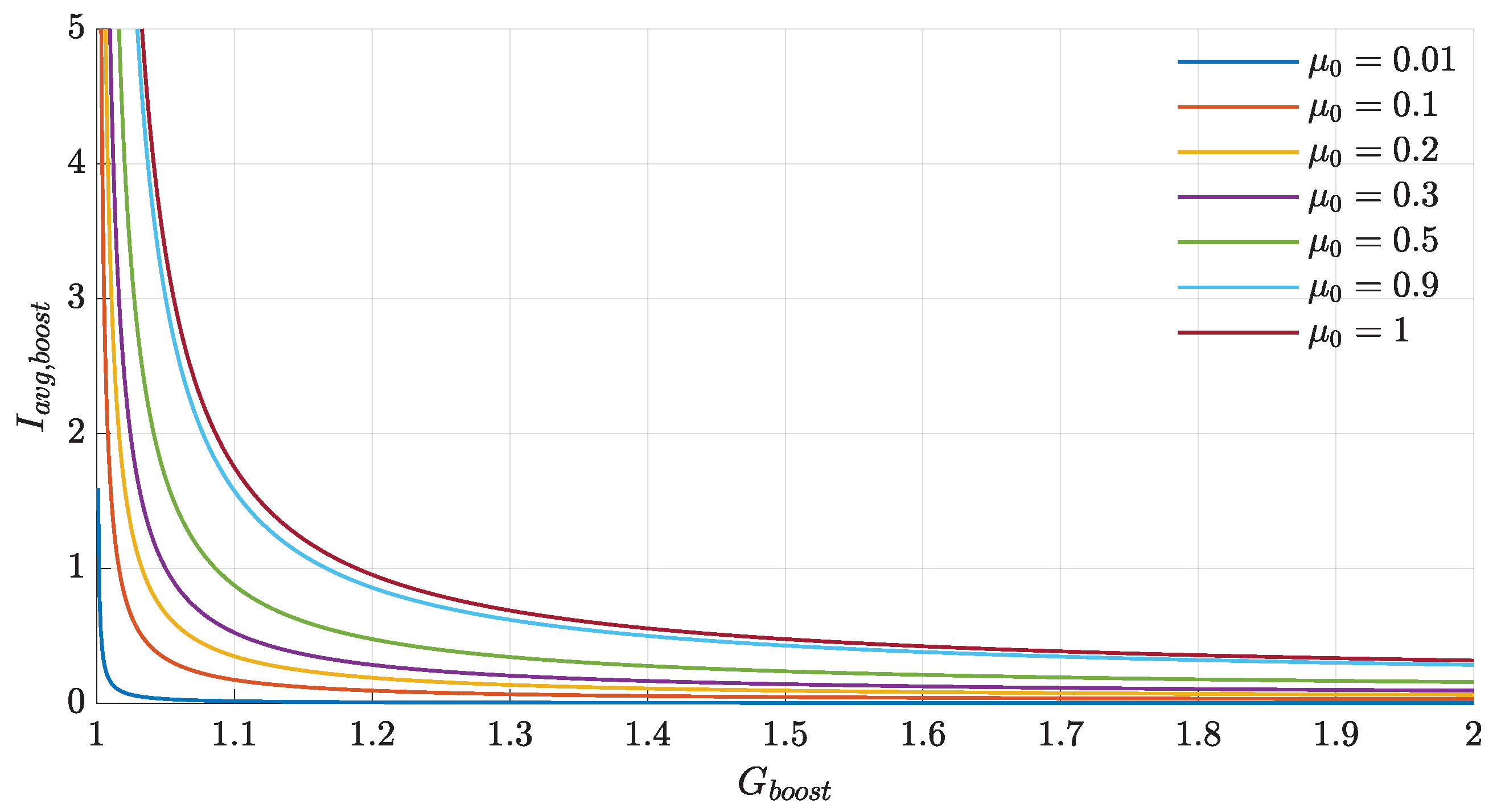
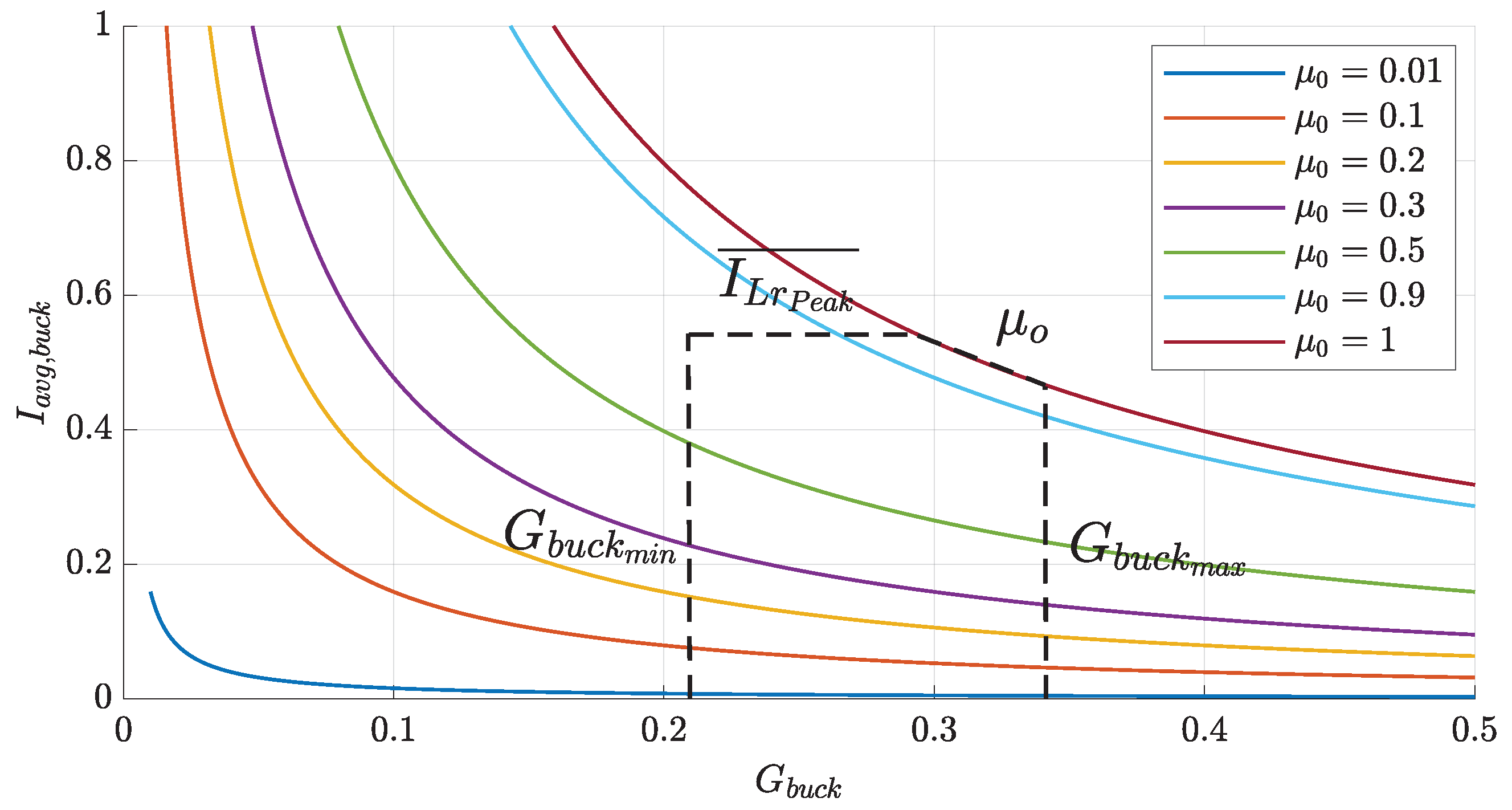
3.2. Resonant Converter Characteristics
4. Resonant Converter Design and Simulation Results
4.1. Design Methodology
- The definition of the optimal gain range for both boost and buck operations;
- The identification, through the parameterized analysis, of the optimal value for the parameterized load ;
- Setting the maximum allowable peak current () in the resonant inductor, switches, and diodes;
- The choice of the switching technology for the required resonant frequency ;
- Checking the UC pack current capability over both the charge and discharge operations.
- Reduce the power capability of the converter; a capability factor k is defined setting the maximum gain of the converter and the maximum input current at the UC pack :Therefore, the capability of the system is defined by .
- Use more than one converter in interleaving mode [22,23]; assuming a reasonable number of converters (), the power capability of each one becomes:This choice can halve the power capability of each converter, thus the input current, while increasing the current peak to the UC pack of just a factor of . The resulting peak current in the UC pack is:
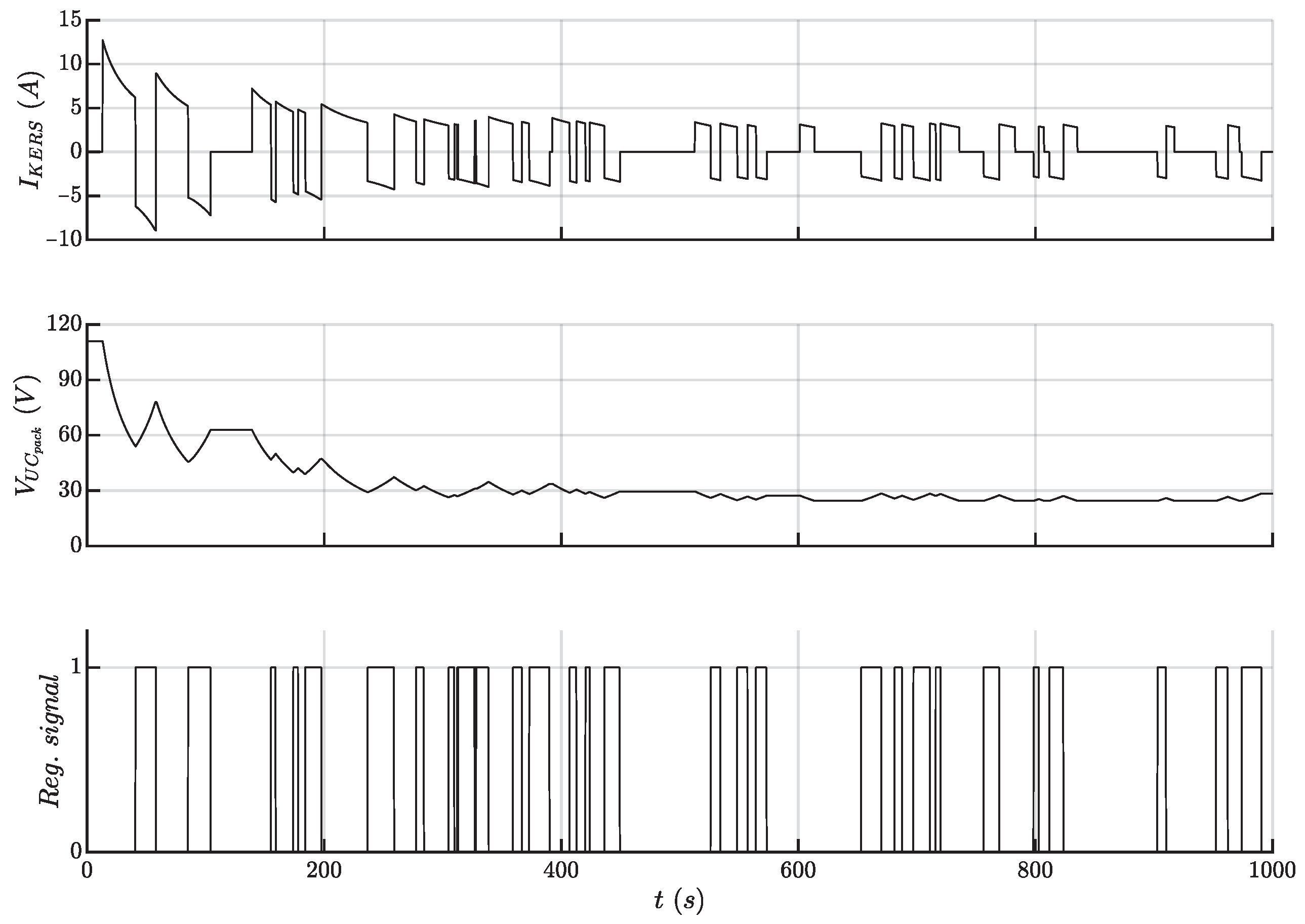
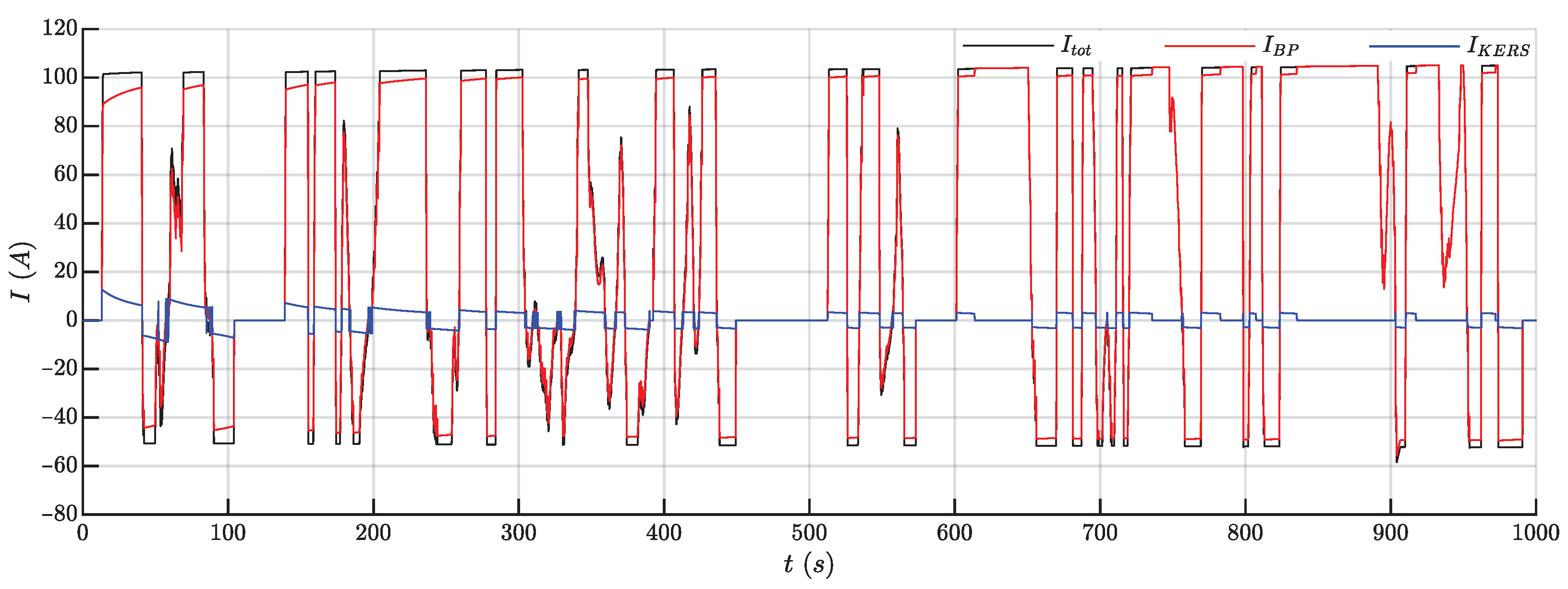
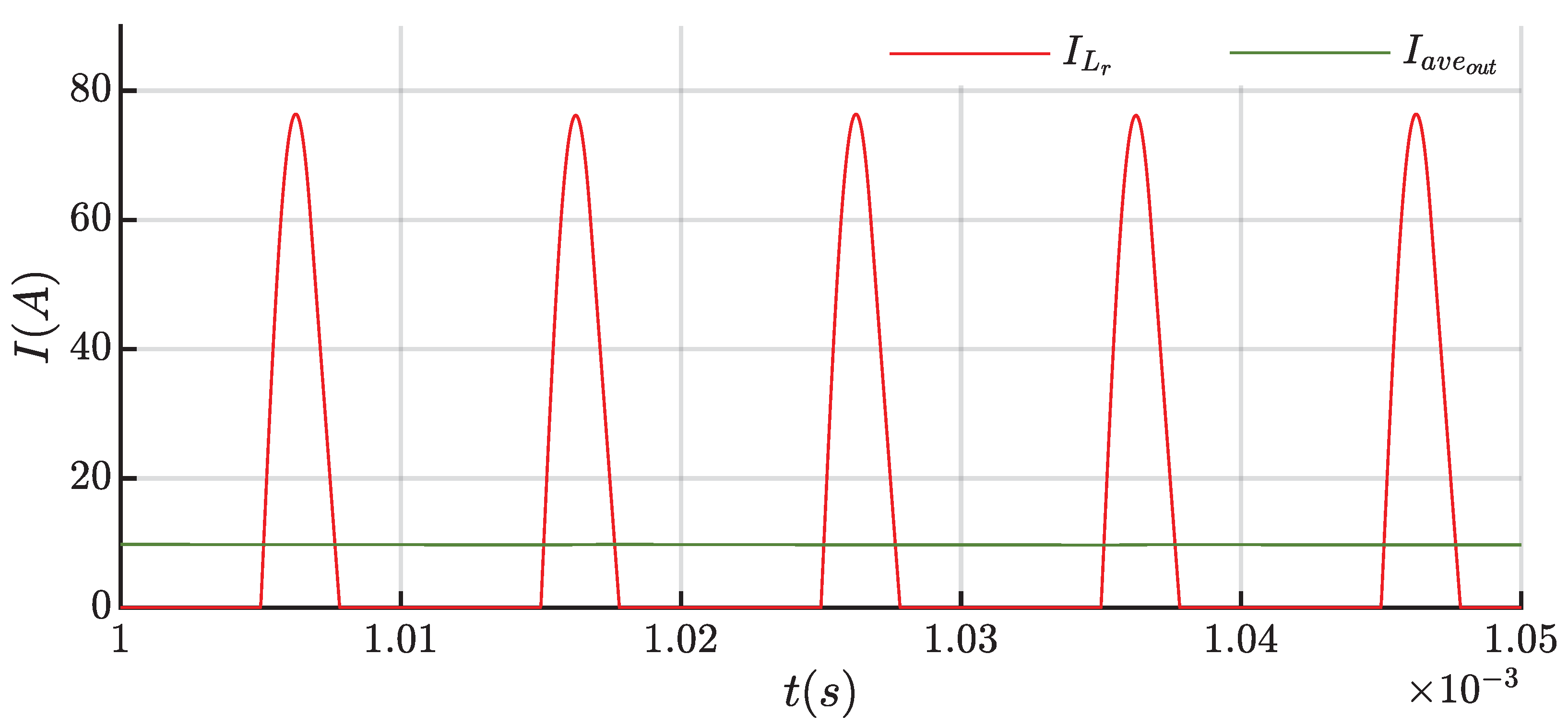
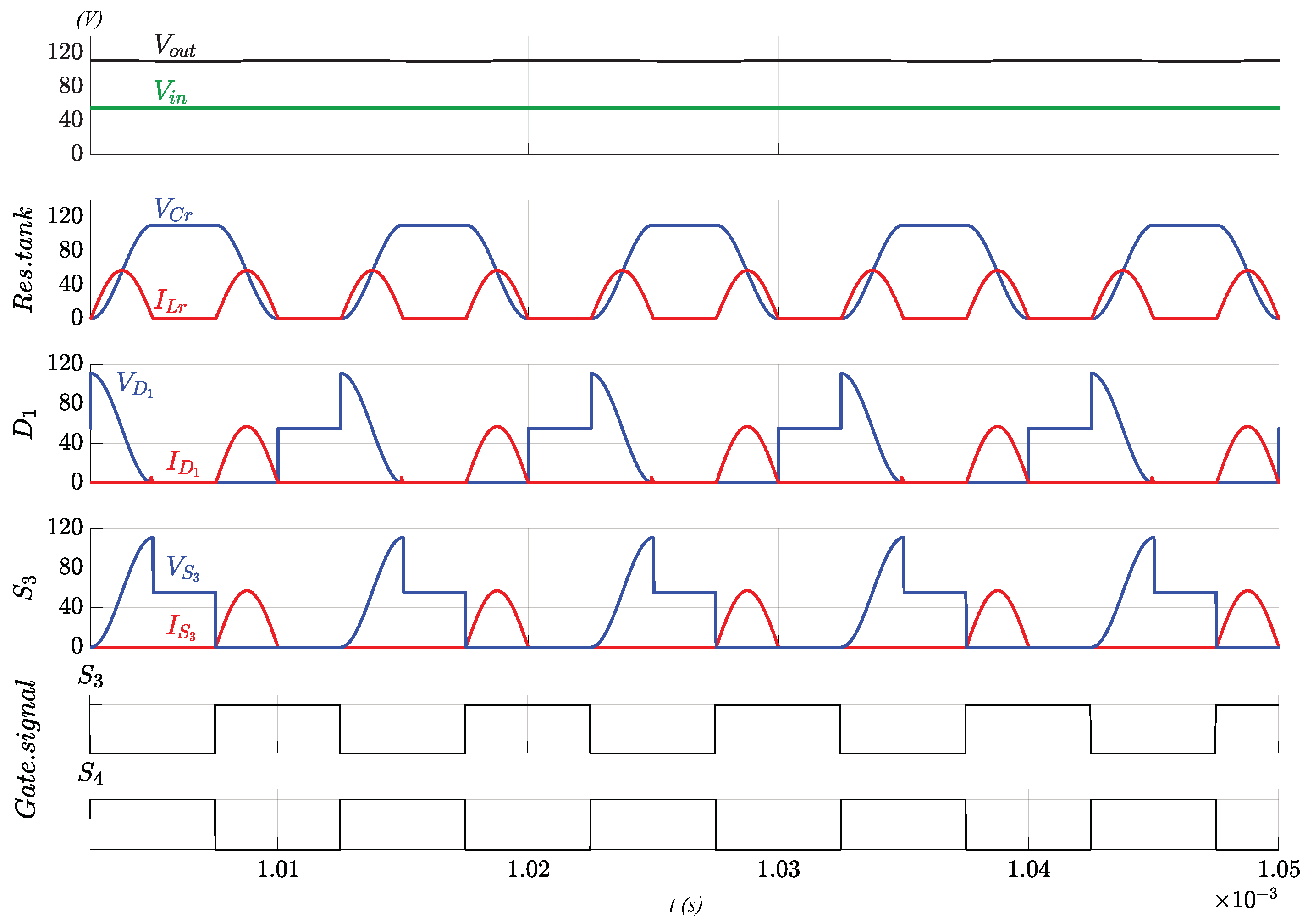
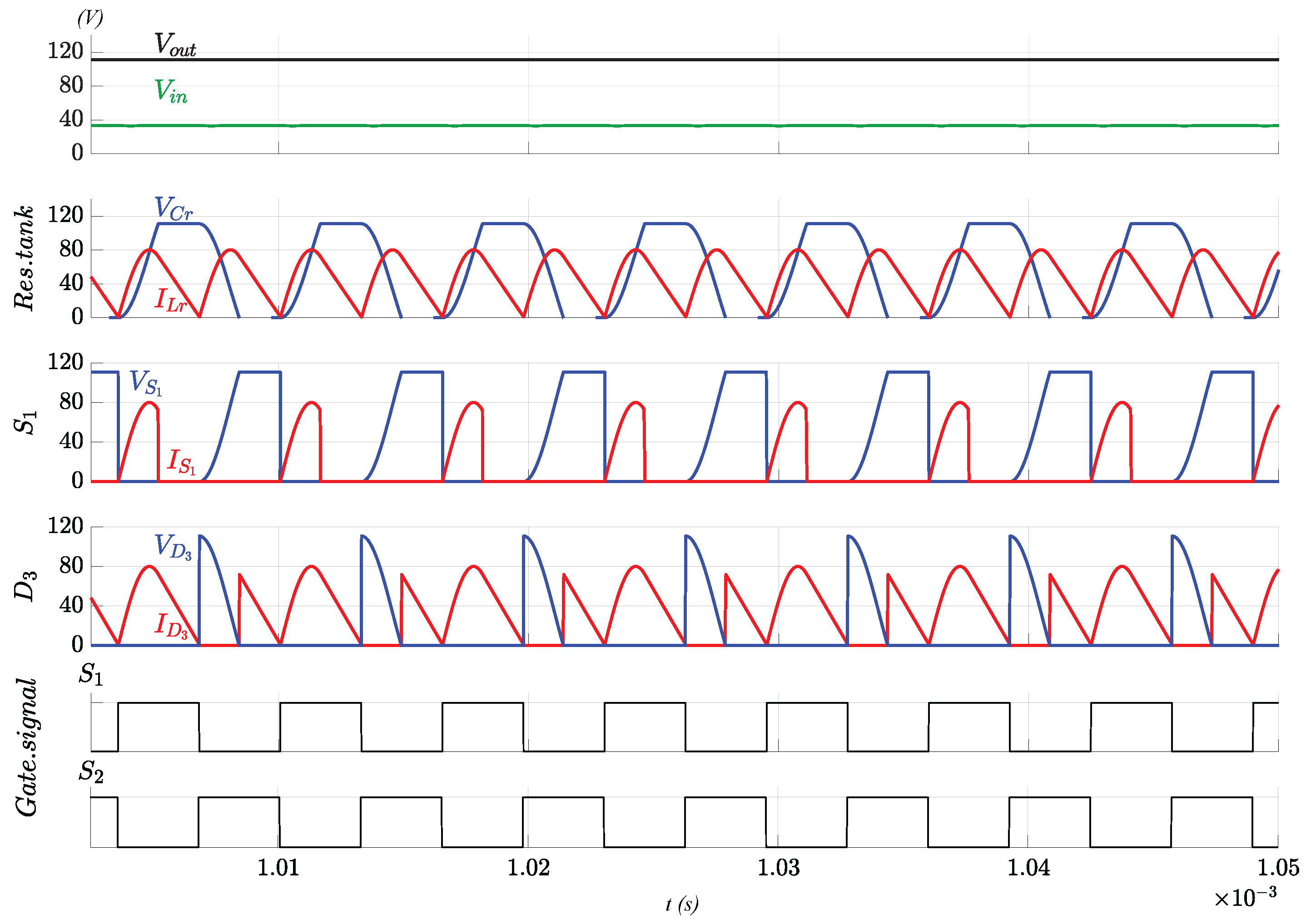
4.2. Resonant Converter Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- World Energy Outlook 2018 (02–2019). Available online: https://www.iea.org/weo2018/ (accessed on 25 November 2020).
- World Bank Data about Transport Emissions (02–2019). Available online: https://data.worldbank.org/indicator/EN.CO2.TRAN.ZS (accessed on 25 November 2020).
- International Energy Agency Emission Statistics (02–2019). Available online: https://www.iea.org/statistics/co2emissions (accessed on 25 November 2020).
- Formula SAE Electric Regulations (02–2019). Available online: https://www.fsaeonline.com/cdsweb/gen/DocumentResources.aspx (accessed on 25 November 2020).
- Ehsani, M.; Gao, Y.; Gay, S.E.; Emadi, A. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles; Chap. (2,4,6,10,11); CRC press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Mid-Eum, C.; Jun-Sik, L.; Seung-Woo, S. Real-Time Optimization for Power Management Systems of a Battery/Supercapacitor Hybrid Energy Storage System in Electric Vehicles. IEEE Trans. Veh. Technol. 2014, 63, 3600–3611. [Google Scholar]
- Zhang, L.; Wang, Z.; Hu, X.; Sun, F.; Dorrell, D.G. A comparative study of equivalent circuit models of ultracapacitors for electric vehicles. J. Power Sources 2015, 274, 899–906. [Google Scholar] [CrossRef]
- Zou, Z.; Cao, J.; Cao, B.; Chen, W. Evaluation Strategy of Regenerative Braking Energy for Supercapacitor Vehicle; ISA Transactions; Elsevier: Amsterdam, The Netherlands, 2015; Volume 55, pp. 234–240. [Google Scholar]
- Radhika Kapoor, C.; Mallika, P. Comparative Study on Various KERS. In Proceedings of the World Congress on Engineering 2013 Vol III, WCE 2013, London, UK, 3–5 July 2013. [Google Scholar]
- Yu, S.; Chen, R.; Viswanathan, A. Survey of Resonant Converter Topologies; Reproduced from 2018 Texas Instruments Power Supply Design Seminar SEM2300© 2018; Texas Instruments Incorporated: Dallas, TX, USA, 2018. [Google Scholar]
- Barbi, I.; Pöttker, F. Soft Commutation Isolated DC-DC Converters; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Zhang, Y.; Cheng, X.; Yin, C.; Cheng, S. A Soft-Switching Bidirectional DC-DC Converter for the Battery Super-Capacitor Hybrid Energy Storage System. IEEE Trans. Ind. Electron. 2018, 65, 7856–7865. [Google Scholar] [CrossRef]
- Shuai, P.; De Novaes, Y.R.; Canales, F.; Barbi, I. A Non-Insulated Resonant Boost Converter. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010. [Google Scholar]
- MATLAB and Simulink Racing Lounge: Vehicle Modeling. Available online: https://it.mathworks.com/matlabcentral/fileexchange/63823-matlab-and-simulink-racing-lounge-vehicle-modeling (accessed on 25 November 2020).
- Morey, T.; Pressman, A.; Billing, K. Switching Power Supply Design, 3rd ed.; McGraw-Hill: New York, NY, USA, 2009. [Google Scholar]
- Tabisz, W.A.; Jovanovic, M.M.; Lee, F.C. High-frequency multi-resonant converter technology and its applications. In Proceedings of the International Conference on Power Electronics and Variable Speed Drives, London, UK, 17–19 July 1990; pp. 1–8. [Google Scholar]
- Med, M.; Tore, M.U.; William, P.R. Power electronics: Converters, Applications and Design, 2nd ed.; Chap. (2,9); John Wiley Sons: Hoboken, NJ, USA, 1995. [Google Scholar]
- Hua, G.; Lee, F.C. An overview of soft-switching techniques for pwm converters. In Proceedings of the International Conference on Power Electronics and Motion Control, Beijing, China, 27–30 June 1994; pp. 801–808. [Google Scholar]
- Rashid, M.H. Power Electronics Handbook; Chap. 15; Academic Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Lee, F.C. High-frequency quasi-resonant and multi-resonant converter technologies. In Proceedings of the 14 Annual Conference of Industrial Electronics Society, Singapore, 24–28 October 1988; pp. 509–521. [Google Scholar]
- Robert, W. Erickson, Dragan Maksimovic. In Fundamentals of Power Electronics, 2nd ed.; Springer: Boston, MA, USA, 2001. [Google Scholar]
- Orietti, E.; Mattavelli, P.; Spiazzi, G.; Adragna, C.; Gattavari, G. Two-phase interleaved LLC resonant converter with current-controlled inductor. In Proceedings of the Brazilian Power Electronics Conference, Bonito-Mato Grosso do Sul, Brazil, 27 September–1 October 2009. [Google Scholar]
- Yi, J.H.; Choi, W.; Cho, B.H. Zero-Voltage-Transition Interleaved Boost Converter With an Auxiliary Coupled Inductor. IEEE Trans. Power Electron. 2017, 32, 5917–5930. [Google Scholar] [CrossRef]
- Shuai, P. Investigation of a Non-insulated Resonant Converter for Power Processing of Alternative Energy Sources; Institute for Power Electronics and Electrical Drives (ISEA) RWTH-Aachen University: Aachen, Germany, 2009. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value | Units |
|---|---|---|---|
| Resonant impedance | () | ||
| Resonant inductor | () | ||
| Resonant capacitor | () | ||
| Resonant angular frequency | (/) | ||
| k | System capability | 16 | (%) |
| Resonant converter power capability | () | ||
| Equivalent resonant converter output resistance | () | ||
| Parameterized input resistance | - | ||
| Buck gain | 0.3 | - | |
| Buck switching frequency | 154.2 | () | |
| Resonant frequency | 200 | () | |
| Snubber resistance | () | ||
| Internal resistance | () | ||
| Snubber capacitance | () | ||
| Nominal boost gain | 2 | - | |
| Number of resonant converter | 2 | - | |
| Parameterized output resistance | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dolara, A.; Leva, S.; Moretti, G.; Mussetta, M.; de Novaes, Y.R. Design of a Resonant Converter for a Regenerative Braking System Based on Ultracap Storage for Application in a Formula SAE Single-Seater Electric Racing Car. Electronics 2021, 10, 161. https://doi.org/10.3390/electronics10020161
Dolara A, Leva S, Moretti G, Mussetta M, de Novaes YR. Design of a Resonant Converter for a Regenerative Braking System Based on Ultracap Storage for Application in a Formula SAE Single-Seater Electric Racing Car. Electronics. 2021; 10(2):161. https://doi.org/10.3390/electronics10020161
Chicago/Turabian StyleDolara, Alberto, Sonia Leva, Giacomo Moretti, Marco Mussetta, and Yales Romulo de Novaes. 2021. "Design of a Resonant Converter for a Regenerative Braking System Based on Ultracap Storage for Application in a Formula SAE Single-Seater Electric Racing Car" Electronics 10, no. 2: 161. https://doi.org/10.3390/electronics10020161
APA StyleDolara, A., Leva, S., Moretti, G., Mussetta, M., & de Novaes, Y. R. (2021). Design of a Resonant Converter for a Regenerative Braking System Based on Ultracap Storage for Application in a Formula SAE Single-Seater Electric Racing Car. Electronics, 10(2), 161. https://doi.org/10.3390/electronics10020161