
Joint Vital Signs and Position Estimation of Multiple Persons Using SIMO Radar

 , ,
, ,
Abstract
:1. Introduction
- The proposed SIMO IR-UWB radar system allows us to simultaneously measure the VSs of spaced persons at the same distance from the radar. It offers a low-cost and good solution for the non-contact Vs measurement of multiple persons in sleep and baby monitoring scenarios;
- The chest motions of multiple targets are accurately separated with the combination of the IMUSIC and LMCV algorithms. The respiration rate estimation is significantly enhanced by forming individual narrow beam focusing on the chest regions associated with each person;
- The experimental results are presented to investigate the performance of the proposed system, showing that our proposed method outperforms the state of the art.
2. Mathematical Model
2.1. Received Signal for SISO Radar
2.2. Received Signal for SIMO Radar
3. Position and VS Estimation
3.1. SIMO Radar System Structure
3.2. Algorithm Scheme
3.2.1. Pre-Processing
3.2.2. DOA Estimation
3.2.3. Distance Estimation
3.2.4. Respiration Rate Estimation
4. Experimental Results
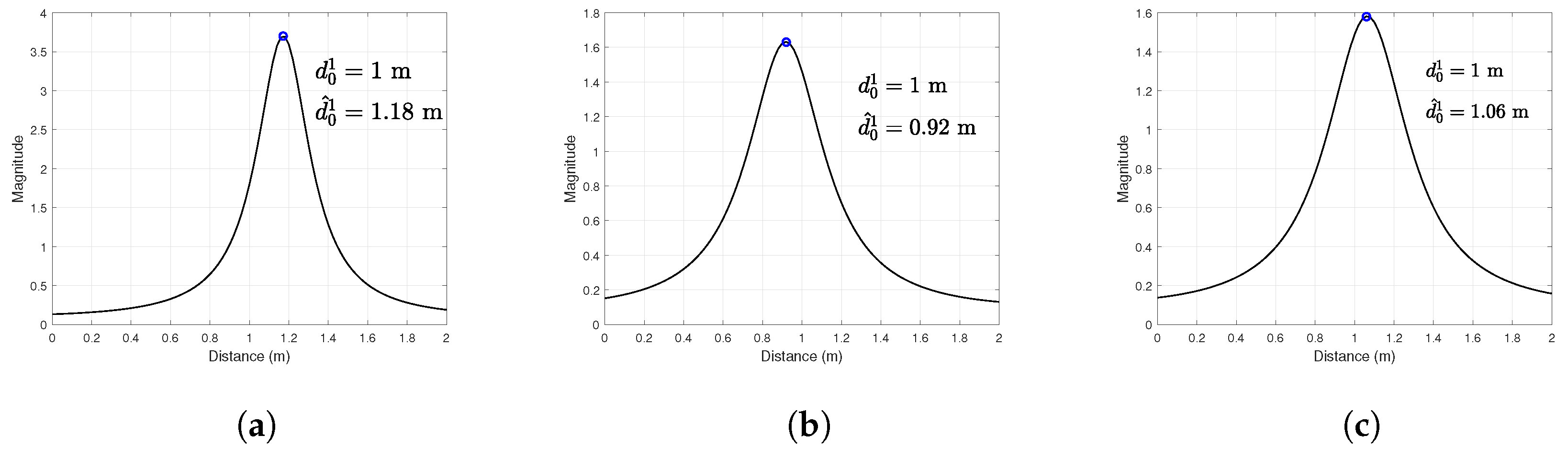
4.1. Position and Respiration Rate Estimation of One Person
4.2. Position and Respiration Rate Estimation of Multiple Persons
4.3. Discussions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Iwata, Y.; Iwata, Y.; Thanh, H.T.; Sun, G.; Ishibashi, K. High Accuracy Heartbeat Detection from CW-Doppler Radar Using Singular Value Decomposition and Matched Filter. Sensors 2021, 21, 3588. [Google Scholar] [CrossRef]
- He, M.; Nian, Y.; Xu, L.; Qiao, L.; Wang, W. Adaptive Separation of Respiratory and Heartbeat Signals among Multiple People Based on Empirical Wavelet Transform Using UWB Radar. Sensors 2020, 20, 4913. [Google Scholar] [CrossRef] [PubMed]
- Turppa, E.; Kortelainen, J.M.; Antropov, O.; Kiuru, T. Vital Sign Monitoring Using FMCW Radar in Various Sleeping Scenarios. Sensors 2020, 20, 6505. [Google Scholar] [CrossRef]
- Kakouche, I.; Maali, A.; el Korso, M.N.; Mesloub, A.; Azzaz, M.S. Fast and Cost-Effective Method for Non-Contact Respiration Rate Tracking Using UWB Impulse Radar. Sens. Actuators A Phys. 2021, 329, 112814. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, F.; Wu, C.; Wang, B.; Liu, K.R. ViMo: Multiperson Vital Sign Monitoring Using Commodity Millimeter-Wave Radio. IEEE Internet Things J. 2021, 8, 1294–1307. [Google Scholar] [CrossRef]
- Feng, C.; Jiang, X.; Jeong, M.-G.; Hong, H.; Fu, C.-H.; Yang, X.; Wang, E.; Zhu, X.; Liu, X. Multitarget Vital Signs Measurement With Chest Motion Imaging Based on MIMO Radar. IEEE Trans. Microw. Theory Tech. 2021, 69, 4735–4747. [Google Scholar] [CrossRef]
- Koda, T.; Sakamoto, T.; Okumura, S.; Taki, H. Noncontact Respiratory Measurement for Multiple People at Arbitrary Locations Using Array Radar and Respiratory-Space Clustering. IEEE Access 2021, 9, 106895–106906. [Google Scholar] [CrossRef]
- Xiong, J.; Hong, H.; Zhang, H.; Wang, N.; Chu, H.; Zhu, X. Multitarget Respiration Detection With Adaptive Digital Beamforming Technique Based on SIMO Radar. IEEE Trans. Microw. Theory Tech. 2020, 68, 4814–4824. [Google Scholar] [CrossRef]
- Lu, C.; Yuan, Y.; Tseng, C.-H.; Wu, C.-T.M. Multi-target continuous wave vital sign radar using 24 GHz metamaterial leaky wave antennas. In Proceedings of the 2019 IEEE MTT-S International Microwave Biomedical Conference (IMBioC), Nanjing, China, 6–8 May 2019; pp. 1–4. [Google Scholar]
- Ren, L.; Tran, N.; Foroughian, F.; Naishadham, K.; Piou, J.E.; Kilic, O.; Fathy, A.E. Short-time state-space method for micro-doppler identification of walking subject using uwb impulse doppler radar. IEEE Trans. Microw. Theory Tech. 2018, 66, 3521–3534. [Google Scholar] [CrossRef]
- Kakouche, I.; Maali, A.; El Korso, M.N.; Mesloub, A.; Azzaz, M.S. Non-contact measurement of respiration and heart rates based on subspace methods and iterative notch filter using UWB impulse radar. J. Phys. D Appl. Phys. 2021, 55, 035401. [Google Scholar] [CrossRef]
- Shen, H.; Xu, C.; Yang, Y.; Sun, L.; Cai, Z.; Bai, L.; Huang, X. Respiration and heartbeat rates measurement based on autocorrelation using ir-uwb radar. IEEE Trans. Circuits Syst. II Express Briefs 2018, 65, 1470–1474. [Google Scholar] [CrossRef]
- Lee, K.J.; Park, C.; Lee, B. Tracking driver’s heart rate by continuous wave Doppler radar. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 5417–5420. [Google Scholar]
- Han, K. Detection and Localization of Multiple Humans Based on Curve Length of I/Q Signal Trajectory Using MIMO FMCW Radar. IEEE Microw. Wirel. Components Lett. 2021, 31, 413–416. [Google Scholar] [CrossRef]
- Ren, L.; Nahar, S.; Fathy, A.E.; Phan, T.; Tran, N.; Kilic, O. Investigation of vital signs monitoring errors due to subject’s orientation, clothing and distance from a SFCW radar. In Proceedings of the 2016 IEEE International Symposium on Antennas and Propagation (APSURSI), Fajardo, PR, USA, 26 June–1 July 2016; pp. 1171–1172. [Google Scholar]
- Duan, Z.; Liang, J. Non-contact detection of vital signs using a uwb radar sensor. IEEE Access 2018, 7, 36888–36895. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, X.; Qi, R.; Qi, Z.; Zhu, H. Harmonic Multiple Loop Detection (HMLD) Algorithm for Not-Contact Vital Sign Monitoring Based on Ultra-Wideband (UWB) Radar. IEEE Access 2020, 8, 38786–38793. [Google Scholar] [CrossRef]
- Hu, X.; Jin, T. Short-Range Vital Signs Sensing Based on EEMD and CWT Using IR-UWB Radar. Sensors 2016, 16, 2025. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lazaro, A.; Girbau, D.; Villarino, R. Techniques for clutter suppression in the presence of body movements during the detection of respiratory activity through uwb radars. Sensors 2014, 14, 2595–2618. [Google Scholar] [CrossRef]
- An, Q.; Li, Z.; Liang, F.; Lv, H.; Chen, F.; Qi, F.; Wang, J. Wavelet based human target detection in complex ruins using a low center frequency uwb radar. In Proceedings of the 2016 Progress in Electromagnetic Research Symposium (PIERS), Shanghai, China, 8–11 August 2016; pp. 1744–1747. [Google Scholar]
- Le, M. Heartbeat extraction based on a high order derivative for ultra-wideband impulse radar application. J. Phys. Appl. Phys. 2020, 53, 18LT02. [Google Scholar] [CrossRef]
- Mercuri, M.; Lorato, I.R.; Liu, Y.H.; Wieringa, F.; Van Hoof, C.; Torfs, T. Vital-Sign Monitoring and Spatial Tracking of Multiple People Using a Contactless Radar-Based Sensor. Nat. Electron. 2019, 2, 252–262. [Google Scholar] [CrossRef]
- Sysel, P.; Rajmic, P. Goertzel algorithm generalized to non-integer multiples of fundamental frequency. EURASIP J. Adv. Signal Process 2012, 2012, 56. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, Z.; Song, Y.; Du, Q. Wideband DOA Estimation Based on Incoherent Signal Subspace Method. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2018, 37, 1271–1289. [Google Scholar] [CrossRef]
- Chouragade, J.; Muthu, R.K. Continuous Mapping of Broadband VHF Lightning Sources by Real-Valued MUSIC. IEEE Trans. Geosci. Remote. Sens. 2021, 1–7. [Google Scholar] [CrossRef]
- Wang, D.; Li, Y.; Xiong, S. Broadband DOA Estimation Based on Nested Arrays. In Proceedings of the 2nd International Conference on Telecommunications and Communication Engineering (ICTCE), Beijing, China, 28–30 November 2018. [Google Scholar]
- Bourgeois, J.; Minker, W. Linearly Constrained Minimum Variance Beamforming. Time-Domain Beamforming Blind. Source Sep. Lect. Notes Electr. Eng. 2009, 3, 27–38. [Google Scholar] [CrossRef]
- Zlatka, N.; Stoyanov, G.; Iliev, G.; Poulkov, V. Complex coefficient iir digital filters. Digit. Filters 2011, 209–239. [Google Scholar] [CrossRef] [Green Version]
- Akaike, H. A new look at the statistical model identification. IEEE Trans. Autom. Control. 1974, 19, 716–723. [Google Scholar] [CrossRef]
- Wax, M.; Kailath, T. Detection of signals by information theoretic criteria. IEEE Trans. Acoust. Speech Signal Process 1985, 33, 387–392. [Google Scholar] [CrossRef] [Green Version]
- Habets, E.A.P.; Benesty, J.; Gannot, S.; Naylor, P.A.; Cohen, I. On the application of the LCMV beamformer to speech enhancement. In Proceedings of the 2009 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics, New Paltz, NY, USA, 18–21 October 2009; pp. 141–144. [Google Scholar] [CrossRef]
- Gentilho, E.; Scalassara, P.R.; Abrão, T. Direction-of-Arrival Estimation Methods: A Performance-Complexity Tradeoff Perspective. J. Sign. Process Syst. 2020, 92, 239–256. [Google Scholar] [CrossRef] [Green Version]
- Giavarina, D. Understanding Bland Altman analysis. Biochem Med (Zagreb). Biochem. Medica 2015, 25, 141–151. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, A.; Roh, J.C.; Wang, D.; Dubey, A. Vital signs monitoring of multiple people using a FMCW millimeter-wave sensor. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1450–1455. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kakouche, I.; Abadlia, H.; El Korso, M.N.; Mesloub, A.; Maali, A.; Azzaz, M.S. Joint Vital Signs and Position Estimation of Multiple Persons Using SIMO Radar. Electronics 2021, 10, 2805. https://doi.org/10.3390/electronics10222805
Kakouche I, Abadlia H, El Korso MN, Mesloub A, Maali A, Azzaz MS. Joint Vital Signs and Position Estimation of Multiple Persons Using SIMO Radar. Electronics. 2021; 10(22):2805. https://doi.org/10.3390/electronics10222805
Chicago/Turabian StyleKakouche, Ibrahim, Hamza Abadlia, Mohammed Nabil El Korso, Ammar Mesloub, Abdelmadjid Maali, and Mohamed Salah Azzaz. 2021. "Joint Vital Signs and Position Estimation of Multiple Persons Using SIMO Radar" Electronics 10, no. 22: 2805. https://doi.org/10.3390/electronics10222805
APA StyleKakouche, I., Abadlia, H., El Korso, M. N., Mesloub, A., Maali, A., & Azzaz, M. S. (2021). Joint Vital Signs and Position Estimation of Multiple Persons Using SIMO Radar. Electronics, 10(22), 2805. https://doi.org/10.3390/electronics10222805