
Attack and Defense Strategy of Distribution Network Cyber-Physical System Considering EV Source-Charge Bidirectionality



Abstract
:1. Introduction
2. Methods
2.1. Consistency-Based Energy Management Algorithm
2.1.1. Problem Planning
2.1.2. Distributed Algorithm Based on Consistency
2.1.3. Data Integrity Attack
2.2. Isolation Control Strategy Based on Privacy Protection Protocol
2.2.1. Privacy Protection Agreement
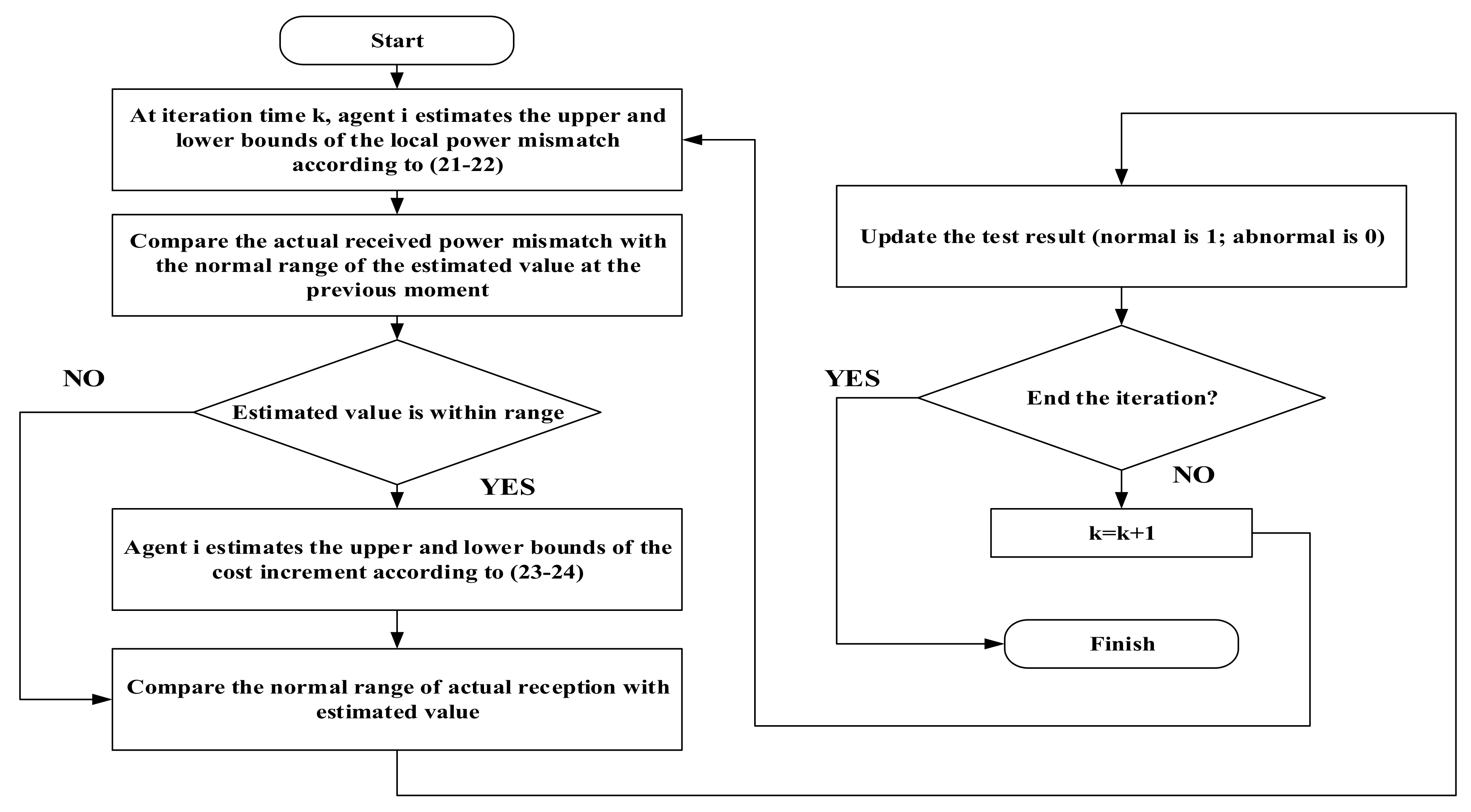
2.2.2. Attack Detection Algorithm
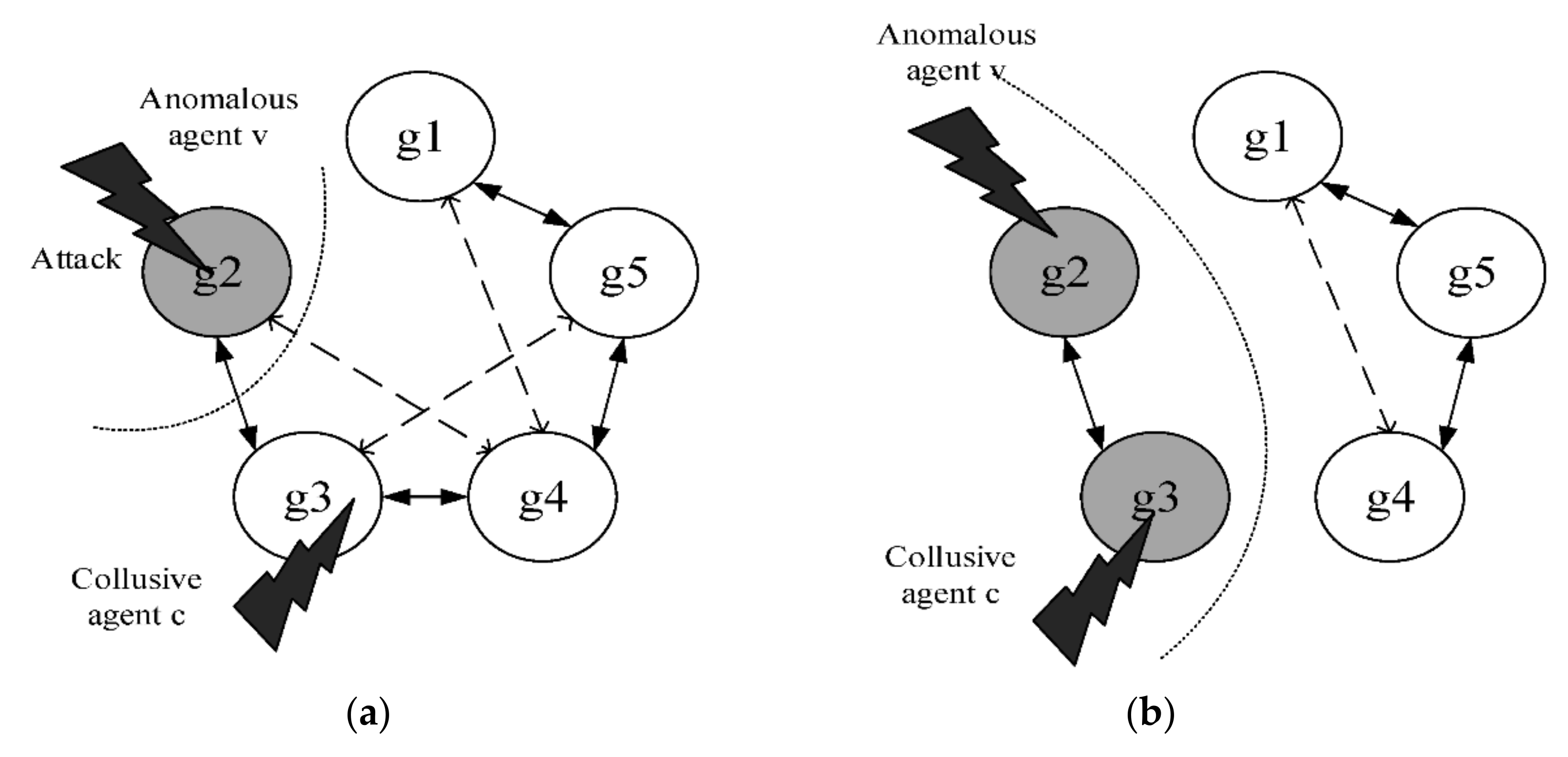
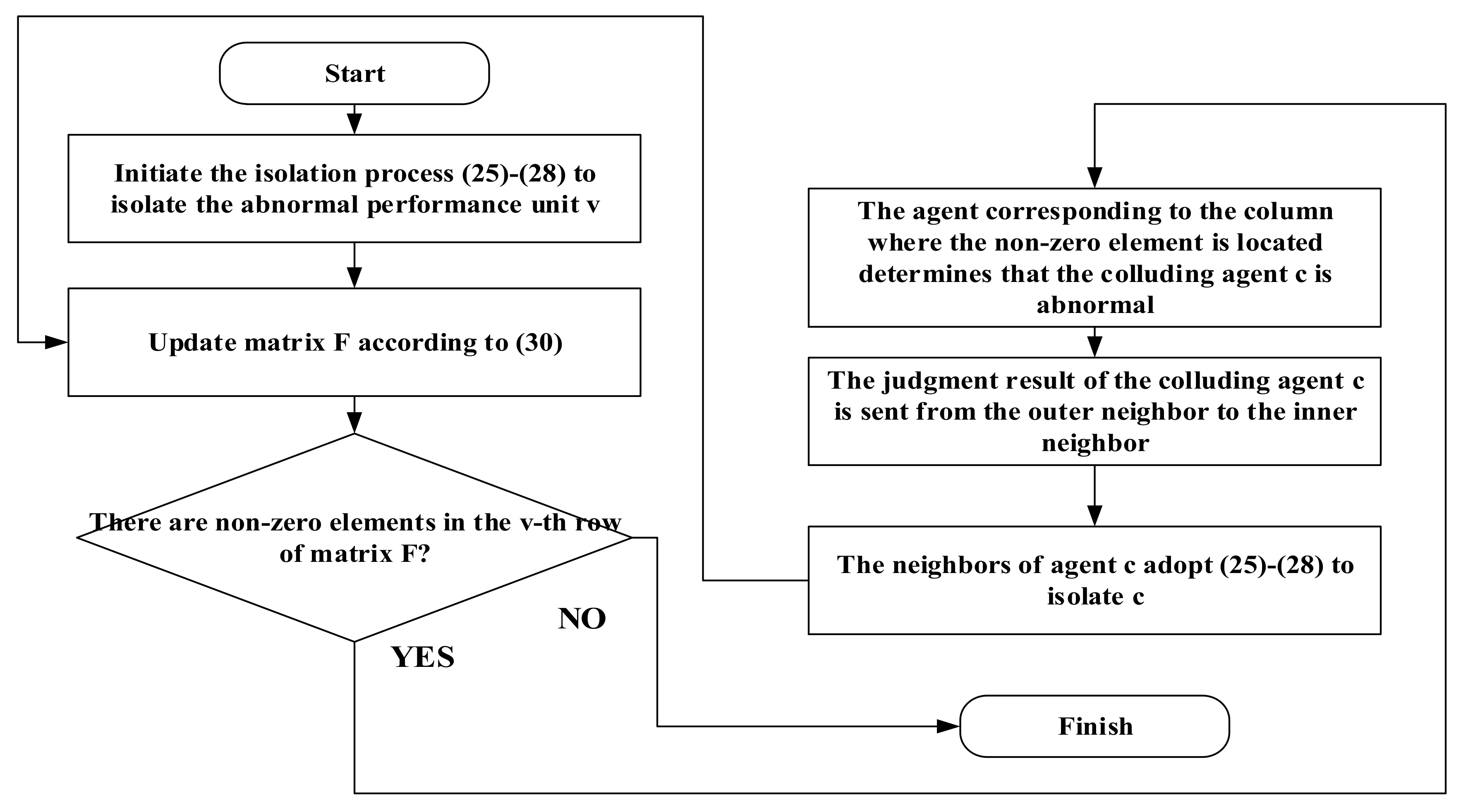
2.2.3. Attack Isolation Algorithm
3. Results
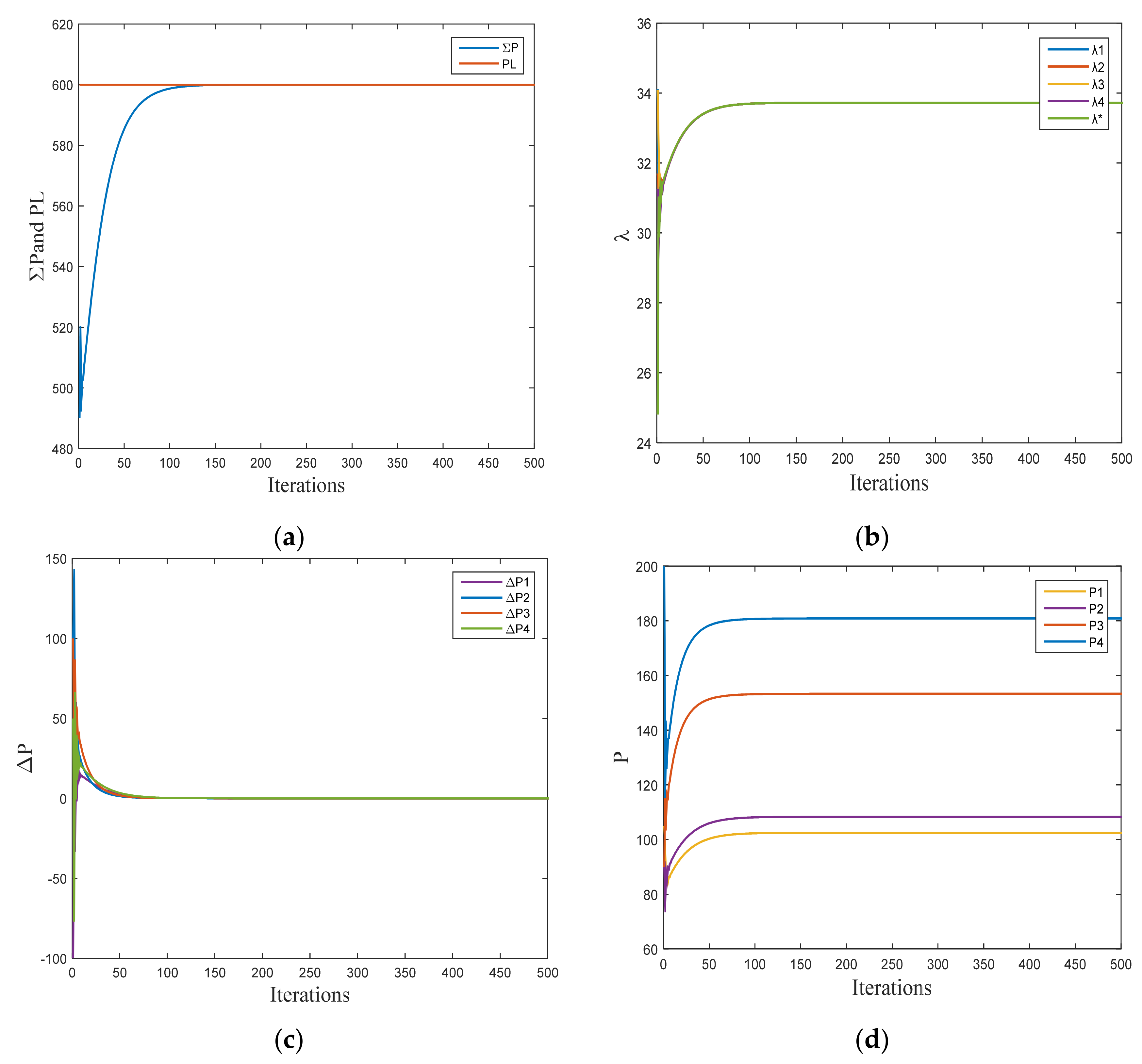
3.1. Economic Dispatch of Normal Communication
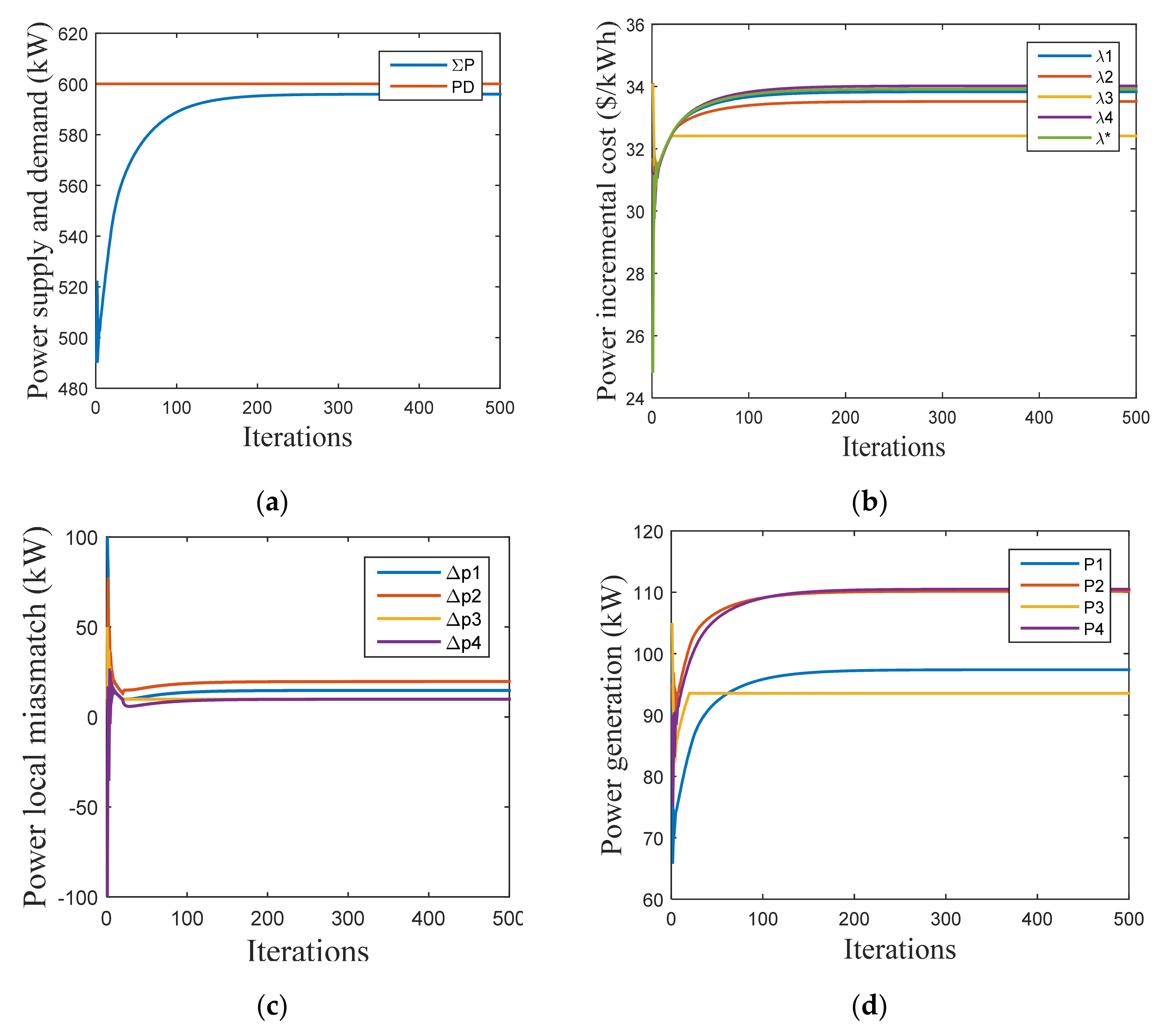
3.2. Economic Dispatch of Conspiracy Attacks
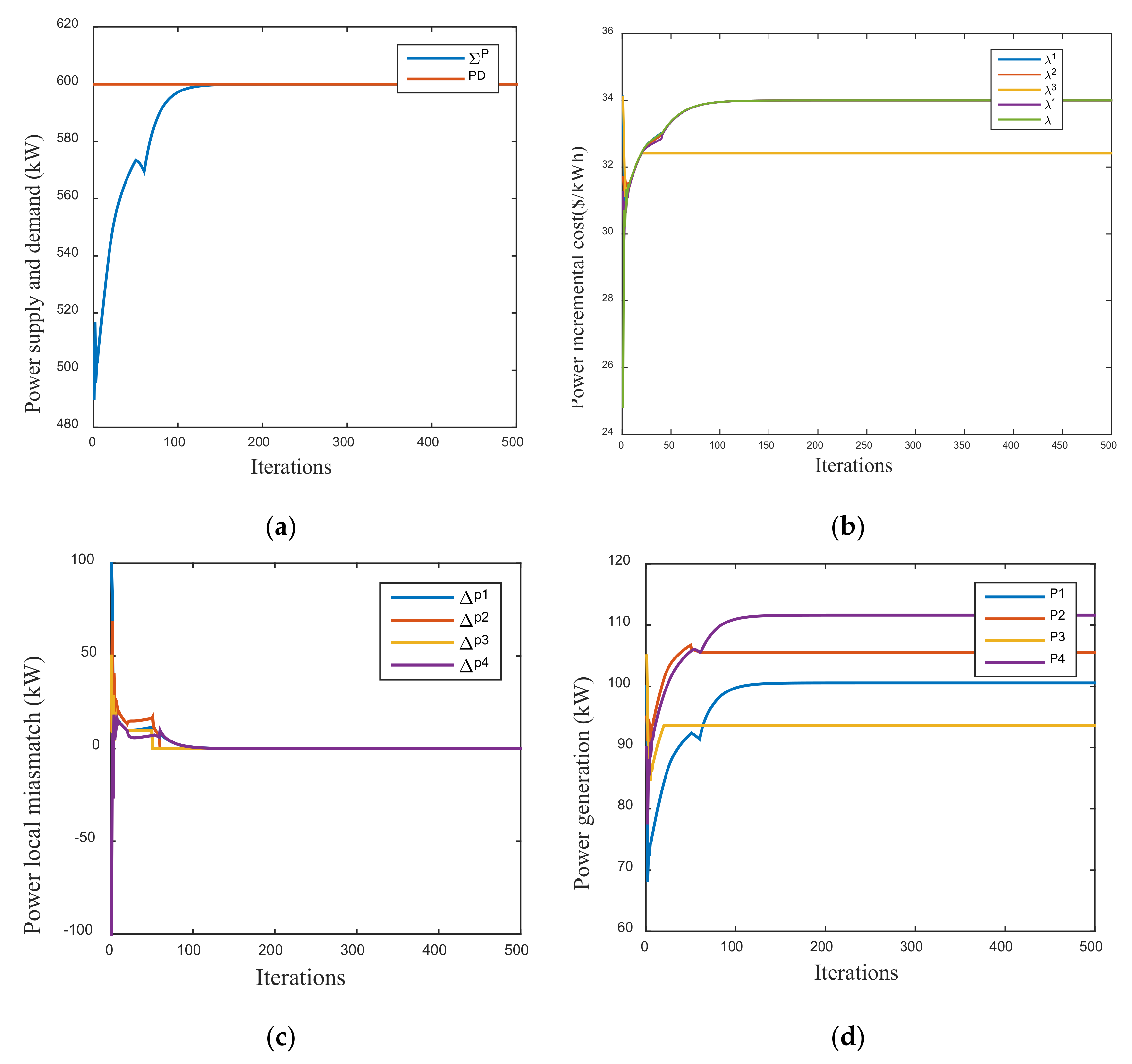
3.3. Economic Dispatch with Robust Isolation
4. Discussion
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Khaki, B.; Chu, C.; Gadh, R. A Hierarchical ADMM Based Framework for EV Charging Scheduling. In Proceedings of the 2018 IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Denver, CO, USA, 16–19 April 2018; pp. 1–9. [Google Scholar]
- Patnam, B.S.K.; Pindoriya, N.M. DLMP Calculationand Congestion Minimization with EV Aggregator Loading in a Distribution Network Using Bilevel Program. IEEE Syst. J. 2020, 99, 1–12. [Google Scholar]
- Wei, W.; Liu, F.; Mei, S. Charging Strategies of EV Aggregator Under Renewable Generation and Congestion: A Normalized Nash Equilibrium Approach. IEEE Trans. Smart Grid 2017, 7, 1630–1641. [Google Scholar] [CrossRef]
- Seo, M.; Kim, C.; Han, S. Peak shaving of an EV Aggregator Using Quadratic Programming. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 2794–2798. [Google Scholar]
- Ko, K.S.; Sung, D.K. The Effect of EV Aggregators With Time-Varying Delays on the Stability of a Load Frequency Control System. IEEE Trans. Power Syst. 2018, 33, 669–680. [Google Scholar] [CrossRef]
- Wang, R.; Sun, Q.; Tu, P.; Xiao, J.; Gui, Y.; Wang, P. Reduced-Order Aggregate Model for Large-Scale Converters with Inhomogeneous Initial Conditions in DC Microgrids. IEEE Trans. Energy Convers. 2021, 36, 2473–2484. [Google Scholar] [CrossRef]
- Huang, B.; Li, Y.; Zhan, F.; Sun, Q.; Zhang, H. A Distributed Robust Economic Dispatch Strategy for Integrated Energy System Considering Cyber-Attacks. IEEE Trans. Ind. Inform. 2021, 18. [Google Scholar] [CrossRef]
- Fu, C.-Y.; Wang, L.-Z.; Qi, D.-L.; Zhang, J.-L. Design method and example implementation of hybrid simulation platform for active distribution network information physical system. Chin. J. Electr. Eng. 2019, 39, 7118–7125. [Google Scholar]
- Li, P.-K.; Liu, Y.; Xin, H.-H.; Qi, D.-L. Vulnerability assessment of distribution network information physical system under distributed collaborative control mode. Power Syst. Autom. 2018, 42, 28–35. [Google Scholar]
- Zhang, L.; Ji, S.; Gu, S.; Huang, X.; Palma, J.; Giewont, W.; Wang, F.; Tolbert, L.M. Design considerations for high-voltage-insulated gate driver power supply for 10-kV SiC MOSFET applied in medium-voltage converter. IEEE Trans. Ind. Electron. 2021, 68, 5712–5724. [Google Scholar] [CrossRef]
- Zhang, L.; Ruan, X. Control schemes for reducing the second harmonic current in two-stage single-phase converter: An overview from dc-bus port-impedance characteristic. IEEE Trans. Power Electron. 2019, 34, 10341–10358. [Google Scholar] [CrossRef]
- Zhang, Y.-H.; Ni, M.; Sun, Y.-H.; Li, M.-L. Quantitative risk assessment of distribution network information physical system against network attack. Power Syst. Autom. 2019, 43, 12–30. [Google Scholar]
- Tang, Y.; Chen, Q.; Li, M.-Y.; Wang, Q.; Ni, M.; Liang, Y. A survey of network attack in the environment of power information physical fusion system. Power Syst. Autom. 2016, 40, 59–69. [Google Scholar]
- Wang, Q.; Li, M.-Y.; Tang, Y.; Ni, M. Survey of network attack and defense of power information physical system (1) modeling and evaluation. Power Syst. Autom. 2019, 43, 9–21. [Google Scholar]
- Zeng, W.; Zhang, Y.; Chow, M.Y. Resilient distributed energy manage-ment subject to unexpected misbehaving generation units. IEEE Trans. Ind. Inf. 2017, 13, 208–216. [Google Scholar] [CrossRef]
- Zhao, C.; He, J.; Cheng, P. Analysis of consensus-based distributedeconomic dispatch under stealthy attacks. IEEE Trans. Ind. Electron. 2016, 64, 5107–5117. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, W.; Gong, J. Stable multi-agent-based load sheddingalgorithm for power Systems. IEEE Trans. Power Syst. 2011, 26, 2006–2014. [Google Scholar]
- Rahbari-Asr, N.; Chow, M.Y. Cooperative distributed demand man-agement for community charging of PHEV/PEVs based on KKT con-ditions and consensus networks. IEEE Trans. Ind. Inf. 2014, 10, 1907–1916. [Google Scholar] [CrossRef]
- Le, J.; Zhou, Q.; Zhao, L.-G.; Wang, Y. A review of distributed economic dispatch methods for power system based on consistency algorithm. Power Automat. Equip. 2020, 40, 44–54. [Google Scholar]
- Yang, S.; Tan, S.; Xu, J.-X. Consensus based approach for economicdispatch problem in a smart grid. IEEE Trans. Power Syst. 2013, 28, 4416–4426. [Google Scholar] [CrossRef]
- Li, G.; Wu, J.; Li, J.; Guan, Z.; Guo, L. Fog Computing-Enabled Secure Demand Response for Internet of Energy Against Collusion Attacks Using Consensus and ACE. IEEE Access 2018, 6, 11278–11288. [Google Scholar] [CrossRef]
- Wang, R.; Sun, Q.; Hu, W.; Li, Y.; Ma, D.; Wang, P. SoC-Based Droop Coefficients Stability Region Analysis of the Battery for Stand-Alone Supply Syst. With Constant Power Loads. IEEE Trans. Power Electron. 2021, 36, 7866–7879. [Google Scholar] [CrossRef]
- Rahbari-Asr, N.; Zhang, Y.; Chow, M.-Y. Consensus-based distributedscheduling for cooperative operation of distributed energy resources andstorage devices in smart grids. IET Gener. Trans. Distrib. 2016, 10, 1268–1277. [Google Scholar] [CrossRef]
- Sun, Q.; Fan, R.; Li, Y.; Huang, B.; Ma, D. A Distributed Double-Consensus Algorithm for Residential We-Energy. IEEE Trans. Ind. Inform. 2019, 15, 4830–4842. [Google Scholar] [CrossRef]
- Commerce, B.E.; Jøsang, A.; Ismail, R. The Beta Reputation System. In Proceedings of the 15th Bled Electronic Commerce Conference, Bled, Slovenia, 17–19 June 2002; pp. 41–55. [Google Scholar]
- He, J.; Zhou, M.; Peng, C.; Shi, L.; Chen, J. Consensus Under Bounded Noise in Discrete Network Systems: An Algorithm with Fast Convergence and High Accuracy. IEEE Trans. Cybern. 2016, 46, 1–11. [Google Scholar] [CrossRef]
- Duan, J.; Chow, M.-Y. A Resilient Consensus-Based Distributed Energy Management Algorithm Against Data Integrity Attacks. Smart Grid. IEEE Trans. 2018, 10, 4729–4740. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generator | |||||
|---|---|---|---|---|---|
| 1 | 0.0533 | 23.45 | 50 | 250 | 40 |
| 2 | 0.0735 | 18.66 | 45 | 210 | 35 |
| 3 | 0.06 | 20.3 | 50 | 200 | 37 |
| 4 | 0.0675 | 19.1 | 48 | 220 | 38 |
| EV Aggregator | ||||||
|---|---|---|---|---|---|---|
| 5 | 0.028 | 535 | 0.98 | 0.98 | −90 | 90 |
| 6 | 0.025 | 600 | 0.97 | 0.97 | −100 | 100 |
| 7 | 0.021 | 721 | 0.95 | 0.95 | −120 | 120 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, T.; Zhao, H.; Wang, S.; Yang, C.; Huang, B. Attack and Defense Strategy of Distribution Network Cyber-Physical System Considering EV Source-Charge Bidirectionality. Electronics 2021, 10, 2973. https://doi.org/10.3390/electronics10232973
Li T, Zhao H, Wang S, Yang C, Huang B. Attack and Defense Strategy of Distribution Network Cyber-Physical System Considering EV Source-Charge Bidirectionality. Electronics. 2021; 10(23):2973. https://doi.org/10.3390/electronics10232973
Chicago/Turabian StyleLi, Tong, Hai Zhao, Shihao Wang, Chao Yang, and Bonan Huang. 2021. "Attack and Defense Strategy of Distribution Network Cyber-Physical System Considering EV Source-Charge Bidirectionality" Electronics 10, no. 23: 2973. https://doi.org/10.3390/electronics10232973
APA StyleLi, T., Zhao, H., Wang, S., Yang, C., & Huang, B. (2021). Attack and Defense Strategy of Distribution Network Cyber-Physical System Considering EV Source-Charge Bidirectionality. Electronics, 10(23), 2973. https://doi.org/10.3390/electronics10232973