
A Framework for Using Humanoid Robots in the School Learning Environment




{kind=link}
{kind=link}
Abstract
:1. Introduction
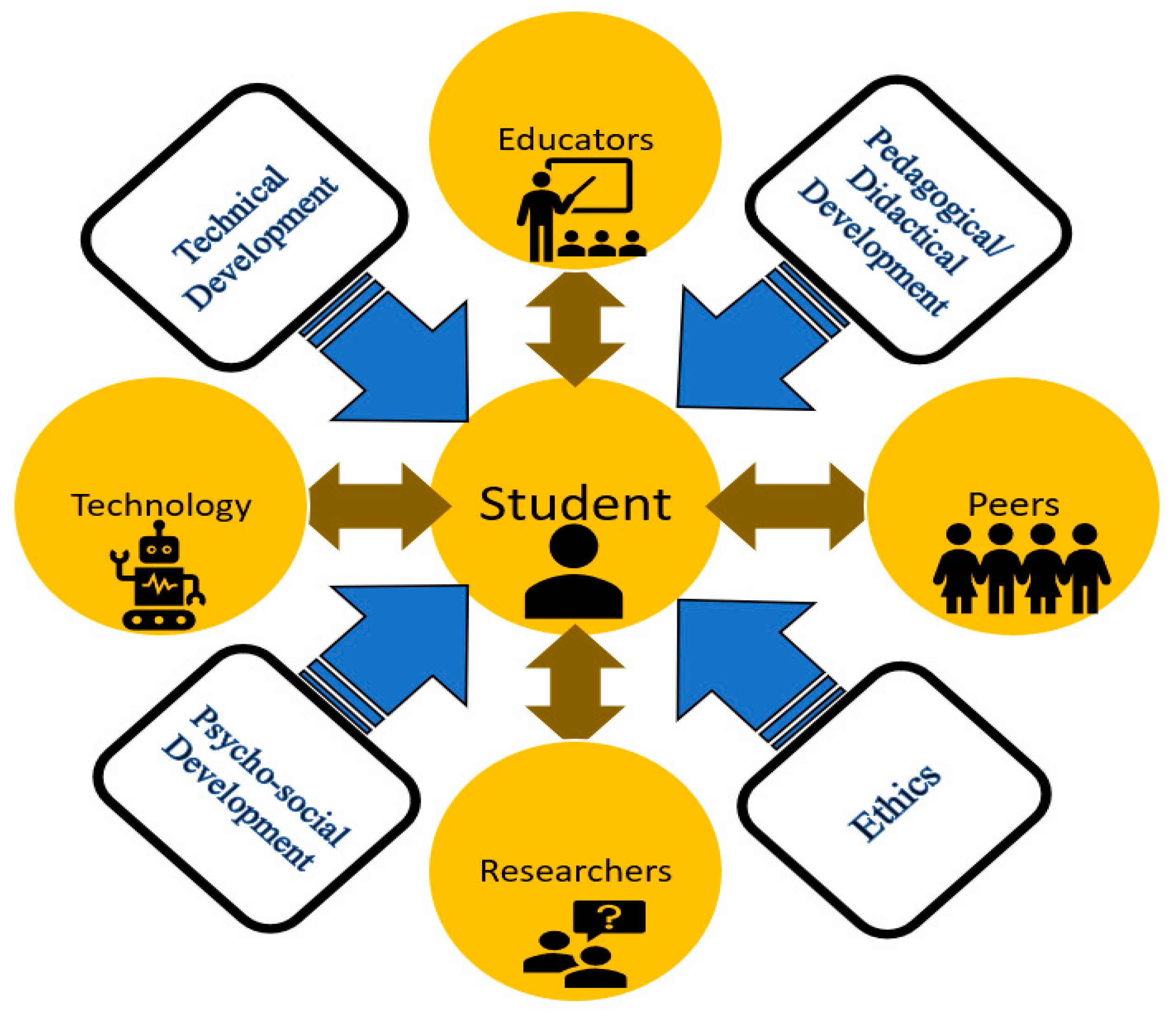
2. A Multidisciplinary Framework for Humanoid Robots in School Learning Environments
2.1. Presupposition
2.2. Pedagogical/Didactical Development
2.3. Technological Development for Human–Robot Interaction
2.4. Psycho-Social Development
2.5. Ethical Development
3. Proposed Application and Evaluation of the Framework
3.1. Methodology
3.2. Methodological Implications
3.3. Preparation
3.4. In-Context Development of Various Aspects and Evaluation Instruments
3.4.1. Pedagogical
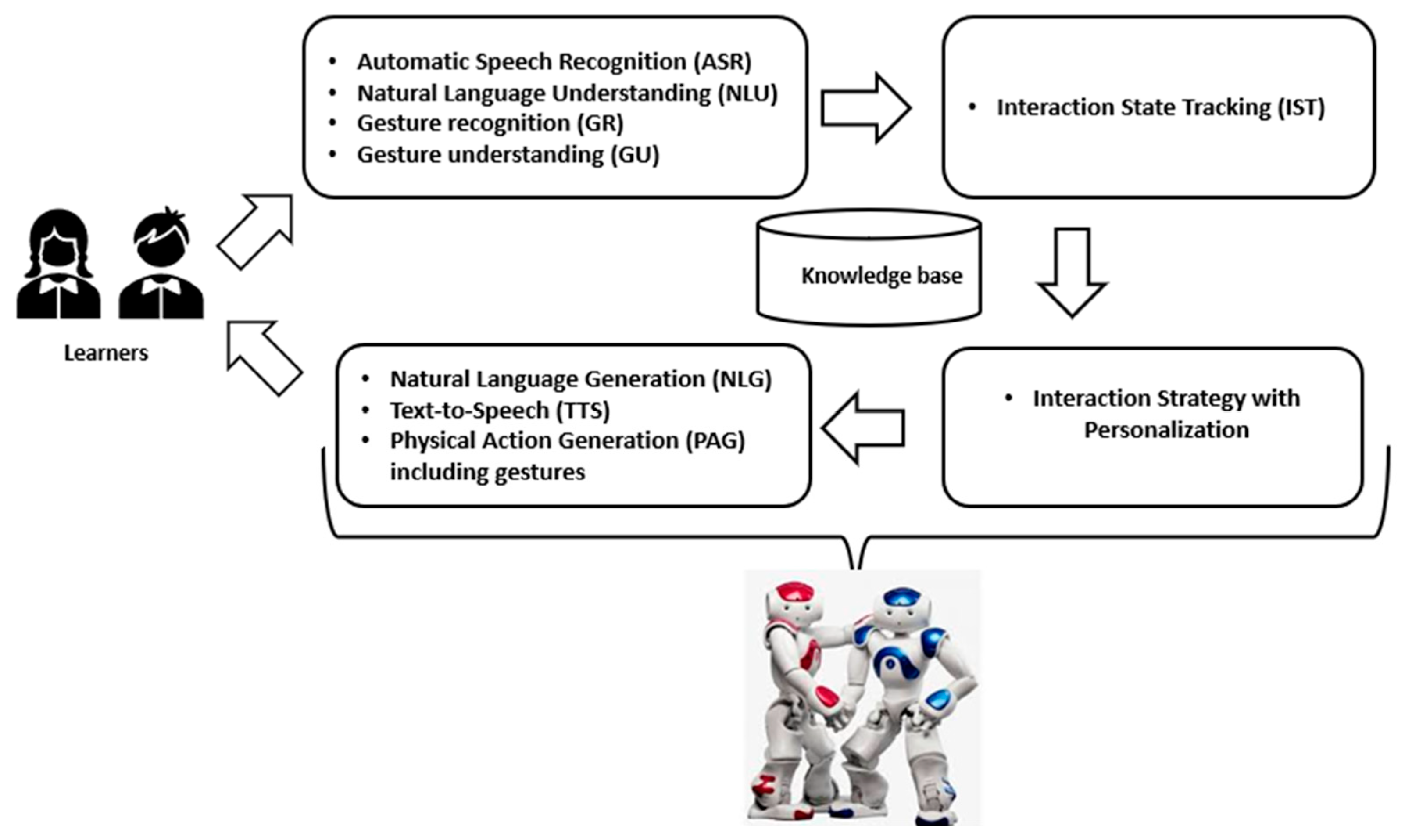
3.4.2. Technical
- (a)
- Automatic speech recognition, natural language understanding, gesture recognition and understanding so that the robot can perceive the learning environment and human participants;
- (b)
- Interaction state tracking so that the robot can determine the current state comprising of the dialog act and/or gesture by maintaining a “memory” to store interaction history and contextual information;
- (c)
- The robot will then form an interaction strategy plan consisting of various actions with personalization;
- (d)
- Natural language generation, text to speech and physical action generation including gestures with personalization for adaptive learning customized according to the level and learning speed of the user.
3.4.3. Psycho-Social
3.4.4. Ethics
4. Case Study
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- BBC. Written Evidence to UK Parliment Artificial Intelligence Select Committee’s Publications. Available online: https://publications.parliament.uk/pa/ld201719/ldselect/ldai/100/10001.htm (accessed on 23 March 2021).
- Frey, C.B.; Osborne, M.A. The future of employment: How susceptible are jobs to computerisation? Technol. Forecast. Soc. Chang. 2017, 114, 254–280. [Google Scholar] [CrossRef]
- Robots double worldwide by 2020. In Proceedings of the International Federation of Robotics Press Conference, Tokyo, Japan, 18 October 2018.
- Economist Intelligence Unit. The Automation Readiness Index: Who Is Ready for the Coming Wave of Automation? Economist Intelligence Unit: London, UK, 2018. [Google Scholar]
- Accenture UK Limited. Written Evidence to UK Parliment Artificial Intelligence Select Committee’s Publications. Available online: https://www.gov.uk/government/publications/government-response-to-the-house-of-lords-select-committee-on-artificial-intelligence (accessed on 23 March 2021).
- Kim, J.-H.; Myung, H.; Lee, S.-M. Robot. Intelligence technology and applications. In Proceedings of the 6th International RiTA Conference 2018, Kuala Lumpur, Malaysia, 16–18 December 2018; Springer: Berlin/Heidelberg, Germany, 2019; Volume 1015. [Google Scholar]
- Tanaka, F.; Cicourel, A.; Movellan, J.R. Socialization between toddlers and robots at an early childhood education center. Proc. Natl. Acad. Sci. USA 2007, 104, 17954–17958. [Google Scholar] [CrossRef] [Green Version]
- Mazzoni, E.; Benvenuti, M. A robot-partner for preschool children learning English using socio-cognitive conflict. J. Educ. Technol. Soc. 2015, 18, 474–485. [Google Scholar]
- Ioannou, A.; Andreou, E.; Christofi, M. Pre-schoolers’ interest and caring behaviour around a humanoid robot. TechTrends 2015, 59, 23–26. [Google Scholar] [CrossRef]
- Crompton, H.; Gregory, K.; Burke, D. Humanoid robots supporting children’s learning in an early childhood setting. Br. J. Educ. Technol. 2018, 49, 911–927. [Google Scholar] [CrossRef] [Green Version]
- Balogh, R. Educational robotic platform based on arduino. In Proceedings of the 1st International Conference on Robotics in Education RiE 2010, Bratislava, Slovakia, 16–17 September 2010; pp. 119–122. [Google Scholar]
- Powers, K.; Gross, P.; Cooper, S.; McNally, M.; Goldman, K.J.; Proulx, V.; Carlisle, M. Tools for teaching introductory programming: What works? In Proceedings of the 37th SIGCSE Technical Symposium on Computer Science Education, New York, NY, USA, 3–5 March 2006; pp. 560–561. [Google Scholar]
- Tang, A.L.; Tung, V.W.S.; Cheng, T.O. Dual roles of educational robotics in management education: Pedagogical means and learning outcomes. Educ. Inf. Technol. 2020, 25, 1271–1283. [Google Scholar] [CrossRef]
- Scaradozzi, D.; Screpanti, L.; Cesaretti, L. Towards a definition of educational robotics: A classification of tools, experiences and assessments. In Smart Learning with Educational Robotics; Springer: Berlin/Heidelberg, Germany, 2019; pp. 63–92. [Google Scholar]
- Ronsivalle, G.B.; Boldi, A.; Gusella, V.; Inama, C.; Carta, S. How to implement educational robotics’ programs in Italian schools: A brief guideline according to an instructional design point of view. Technol. Knowl. Learn. 2019, 24, 227–245. [Google Scholar] [CrossRef]
- Anwar, S.; Bascou, N.A.; Menekse, M.; Kardgar, A. A systematic review of studies on educational robotics. J. Pre-Coll. Eng. Educ. Res. 2019, 9, 2. [Google Scholar] [CrossRef] [Green Version]
- Arís, N.; Orcos, L. Educational robotics in the stage of secondary education: Empirical study on motivation and STEM skills. Educ. Sci. 2019, 9, 73. [Google Scholar] [CrossRef] [Green Version]
- Zhong, B.; Xia, L. A systematic review on exploring the potential of educational robotics in mathematics education. Int. J. Sci. Math. Educ. 2020, 18, 79–101. [Google Scholar] [CrossRef]
- Hoorn, J.F.; Huang, I.S.; Konijn, E.A.; van Buuren, L. Robot tutoring of multiplication: Over one-third learning gain for most, learning loss for some. Robotics 2021, 10, 16. [Google Scholar] [CrossRef]
- Phan, M.-H.; Ngo, H.Q.T. A multidisciplinary mechatronics program: From project-based learning to a community-based approach on an open platform. Electronics 2020, 9, 954. [Google Scholar] [CrossRef]
- Leite, I.; Castellano, G.; Pereira, A.; Martinho, C.; Paiva, A. Modelling empathic behaviour in a robotic game companion for children: An ethnographic study in real-world settings. In Proceedings of the Seventh Annual ACM/IEEE International Conference on Human-Robot Interaction, Boston, MA, USA, 5–8 March 2012; pp. 367–374. [Google Scholar]
- Feil-Seifer, D.; Mataric, M. Robot-assisted therapy for children with autism spectrum disorders. In Proceedings of the 7th International Conference on Interaction Design and Children, Chicago, IL, USA, 11–13 June 2008; pp. 49–52. [Google Scholar]
- Kozima, H.; Michalowski, M.P.; Nakagawa, C. Keepon. Int. J. Soc. Robot. 2009, 1, 3–18. [Google Scholar] [CrossRef]
- Lehmann, H.; Rossi, P.G. Social robots in educational contexts: Developing an application in enactive didactics. J. eLearn. Knowl. Soc. 2019, 15, 27–41. [Google Scholar]
- Kazakoff, E.R.; Sullivan, A.; Bers, M.U. The effect of a classroom-based intensive robotics and programming workshop on sequencing ability in early childhood. Early Child. Educ. J. 2013, 41, 245–255. [Google Scholar] [CrossRef]
- Ros, R.; Baroni, I.; Demiris, Y. Adaptive human-robot interaction in sensorimotor task instruction: From human to robot dance tutors. Robot. Auton. Syst. 2014, 62, 707–720. [Google Scholar] [CrossRef] [Green Version]
- Benitti, F.B.V. Exploring the educational potential of robotics in schools: A systematic review. Comput. Educ. 2012, 58, 978–988. [Google Scholar] [CrossRef]
- Belpaeme, T.; Kennedy, J.; Ramachandran, A.; Scassellati, B.; Tanaka, F. Social robots for education: A review. Sci. Robot. 2018, 3, eaat5954. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karim, M.E.; Lemaignan, S.; Mondada, F. A review: Can robots reshape K-12 STEM education? In Proceedings of the 2015 IEEE International Workshop on Advanced Robotics and Its Social Impacts (ARSO), Lyon, France, 1–3 July 2015; pp. 1–8. [Google Scholar]
- Román-Graván, P.; Hervás-Gómez, C.; Martín-Padilla, A.H.; Fernández-Márquez, E. Perceptions about the use of educational robotics in the initial training of future teachers: A study on steam sustainability among female teachers. Sustainability 2020, 12, 4154. [Google Scholar] [CrossRef]
- Toh, L.P.E.; Causo, A.; Tzuo, P.-W.; Chen, I.-M.; Yeo, S.H. A review on the use of robots in education and young children. J. Educ. Technol. Soc. 2016, 19, 148–163. [Google Scholar]
- De Graaf, M.M. An ethical evaluation of human-robot relationships. Int. J. Soc. Robot. 2016, 8, 589–598. [Google Scholar] [CrossRef] [Green Version]
- Xia, L.; Zhong, B. A systematic review on teaching and learning robotics content knowledge in K-12. Comput. Educ. 2018, 127, 267–282. [Google Scholar] [CrossRef]
- United Nations. The Sustainable Development Goals Report 2019; United Nations: New York, NY, USA, 2019. [Google Scholar]
- Haug, P. Understanding inclusive education: Ideals and reality. Scand. J. Disabil. Res. 2017, 19, 206–217. [Google Scholar] [CrossRef] [Green Version]
- Unesco. The Salamanca Statement and Framework for action on special needs education. In Proceedings of the World Conference on Special Needs Education—Access and Quality, Salamanca, Spain, 7–10 June 1994; Unesco: Salamanca, Spain, 1994. [Google Scholar]
- Truong, H.M. Integrating learning styles and adaptive e-learning system: Current developments, problems and opportunities. Comput. Hum. Behav. 2016, 55, 1185–1193. [Google Scholar] [CrossRef]
- Kolb, D.A. Experiential Learning: Experience as the Source of Learning and Development; Prentice-Hall International: Upper Saddle River, NJ, USA, 1984. [Google Scholar]
- Kolb, D.A.; Boyatzis, R.E.; Mainemelis, C. Experiential learning theory: Previous research and new directions. Perspect. Think. Learn. Cogn. Styles 2001, 1, 227–247. [Google Scholar]
- Lison, P.; Meena, R. Spoken dialogue systems: The new frontier in human-computer interaction. XRDS Crossroads ACM Mag. Stud. 2014, 21, 46–51. [Google Scholar] [CrossRef]
- Funakoshi, K. A multimodal multiparty human-robot dialogue corpus for real world interaction. In Proceedings of the Eleventh International Conference on Language Resources and Evaluation (LREC 2018), Miyazaki, Japan, 7–12 May 2018; pp. 35–39. [Google Scholar]
- Baxter, P.; Kennedy, J.; Belpaeme, T.; Wood, R.; Baroni, I.; Nalin, M. Emergence of turn-taking in unstructured child-robot social interactions. In Proceedings of the 2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Tokyo, Japan, 4–6 March 2013; pp. 77–78. [Google Scholar]
- Jokinen, K.; Wilcock, G. Multimodal open-domain conversations with robotic platforms. In Multimodal Behavior Analysis in the Wild; Elsevier: Amsterdam, The Netherlands, 2019; pp. 9–26. [Google Scholar]
- Yang, L.; Qiu, M.; Qu, C.; Chen, C.; Guo, J.; Zhang, Y.; Croft, W.B.; Chen, H. IART: Intent-aware response ranking with transformers in information-seeking conversation systems. In Proceedings of the Web Conference 2020, Online, 20–24 April 2020; pp. 2592–2598. [Google Scholar]
- Greene, J.C. Mixed Methods in Social Inquiry; John Wiley & Sons: Hoboken, NJ, USA, 2007; Volume 9. [Google Scholar]
- Almalki, S. Integrating quantitative and qualitative data in mixed methods research—Challenges and benefits. J. Educ. Learn. 2016, 5, 288–296. [Google Scholar] [CrossRef]
- Golafshani, N. Understanding reliability and validity in qualitative research. Qual. Rep. 2003, 8, 597–607. [Google Scholar]
- Flick, U. An Introduction to Qualitative Research; SAGE Publications: Thousand Oaks, CA, USA, 2018. [Google Scholar]
- Kim, S.; Banchs, R.E.; Li, H. Exploring convolutional and recurrent neural networks in sequential labelling for dialogue topic tracking. In Proceedings of the 54th Annual Meeting of the Association for Computational Linguistics, Berlin, Germany, 7–12 August 2016; Volume 1, pp. 963–973. [Google Scholar]
- Yao, K.; Peng, B.; Zhang, Y.; Yu, D.; Zweig, G.; Shi, Y. Spoken language understanding using long short-term memory neural networks. In Proceedings of the 2014 IEEE Spoken Language Technology Workshop (SLT), South Lake Tahoe, NV, USA, 7–10 December 2014; pp. 189–194. [Google Scholar]
- Heck, L.; Hakkani-Tür, D.; Tur, G. Leveraging knowledge graphs for web-scale unsupervised semantic parsing. In Proceedings of the 14th Annual Conference of the International Speech Communication Association, Lyon, France, 25–29 August 2013; pp. 1594–1598. [Google Scholar]
- Li, W.; Peng, R.; Wang, Y.; Yan, Z. Knowledge graph based natural language generation with adapted pointer-generator networks. Neurocomputing 2020, 382, 174–187. [Google Scholar] [CrossRef]
- Murphy, R.R.; Schreckenghost, D. Survey of metrics for human-robot interaction. In Proceedings of the 2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Tokyo, Japan, 4–6 March 2013; pp. 197–198. [Google Scholar]
- Marvel, J.A.; Bagchi, S.; Zimmerman, M.; Aksu, M.; Antonishek, B.; Wang, Y.; Mead, R.; Fong, T.; Amor, H.B. Test methods and metrics for effective HRI in collaborative human-robot teams. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Korea, 11–14 March 2019; pp. 696–697. [Google Scholar]
- Begum, M.; Serna, R.W.; Kontak, D.; Allspaw, J.; Kuczynski, J.; Yanco, H.A.; Suarez, J. Measuring the efficacy of robots in autism therapy: How informative are standard hri metrics. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 1–4 March 2015; pp. 335–342. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mishra, D.; Parish, K.; Lugo, R.G.; Wang, H. A Framework for Using Humanoid Robots in the School Learning Environment. Electronics 2021, 10, 756. https://doi.org/10.3390/electronics10060756
Mishra D, Parish K, Lugo RG, Wang H. A Framework for Using Humanoid Robots in the School Learning Environment. Electronics. 2021; 10(6):756. https://doi.org/10.3390/electronics10060756
Chicago/Turabian StyleMishra, Deepti, Karen Parish, Ricardo Gregorio Lugo, and Hao Wang. 2021. "A Framework for Using Humanoid Robots in the School Learning Environment" Electronics 10, no. 6: 756. https://doi.org/10.3390/electronics10060756
APA StyleMishra, D., Parish, K., Lugo, R. G., & Wang, H. (2021). A Framework for Using Humanoid Robots in the School Learning Environment. Electronics, 10(6), 756. https://doi.org/10.3390/electronics10060756