A Maneuver Evaluation Algorithm for Lane-Change Assistance System


Abstract
:1. Introduction
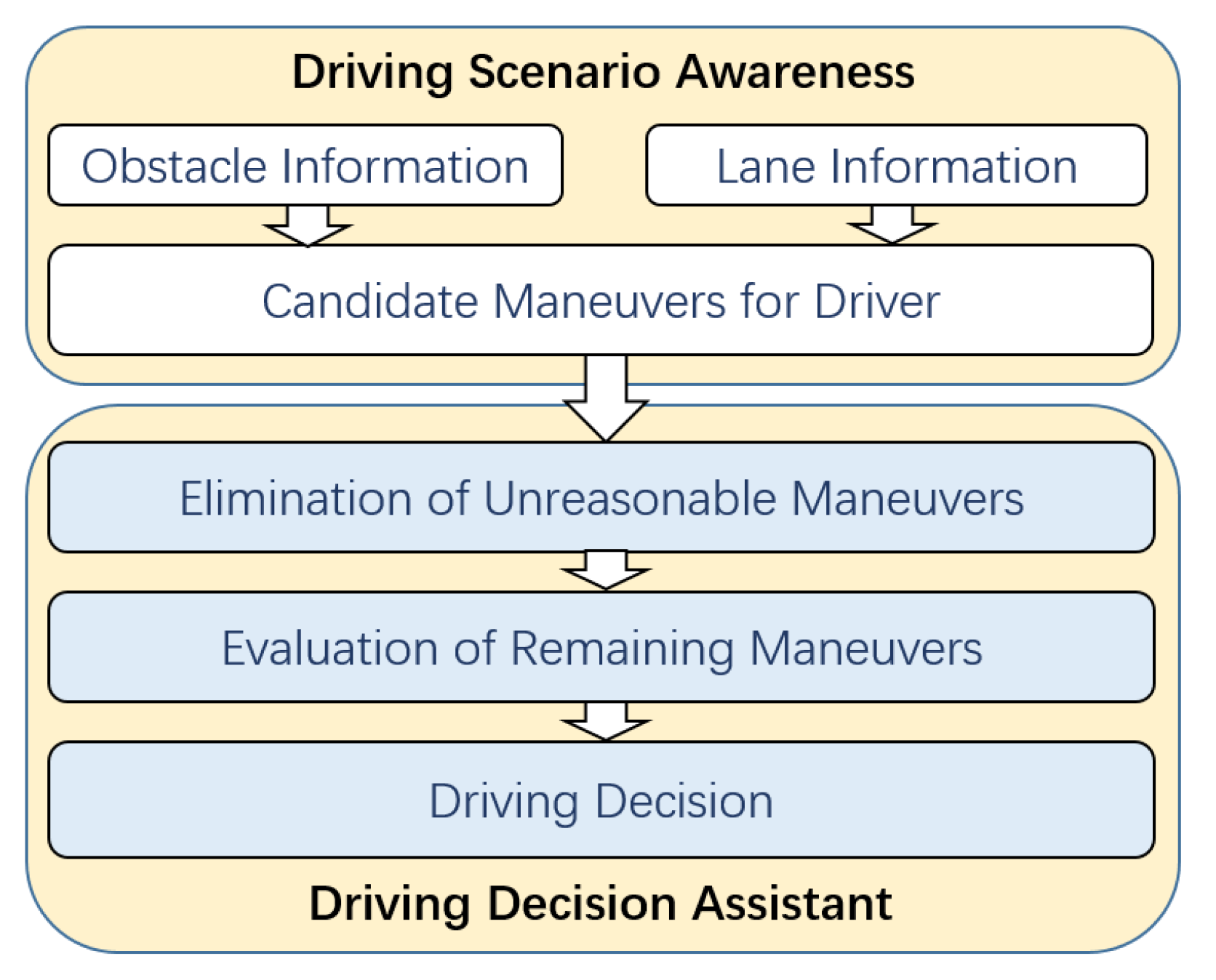
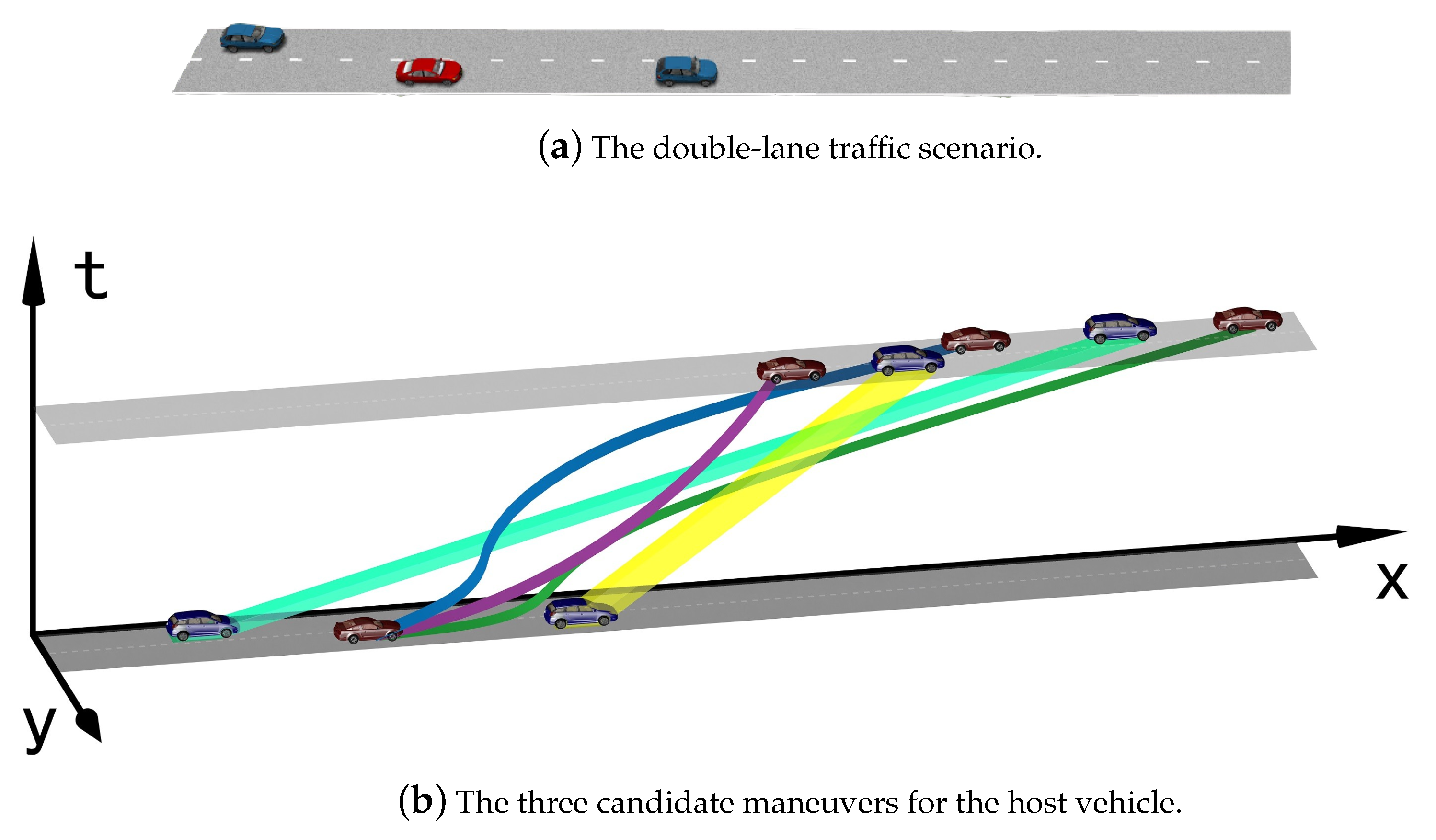
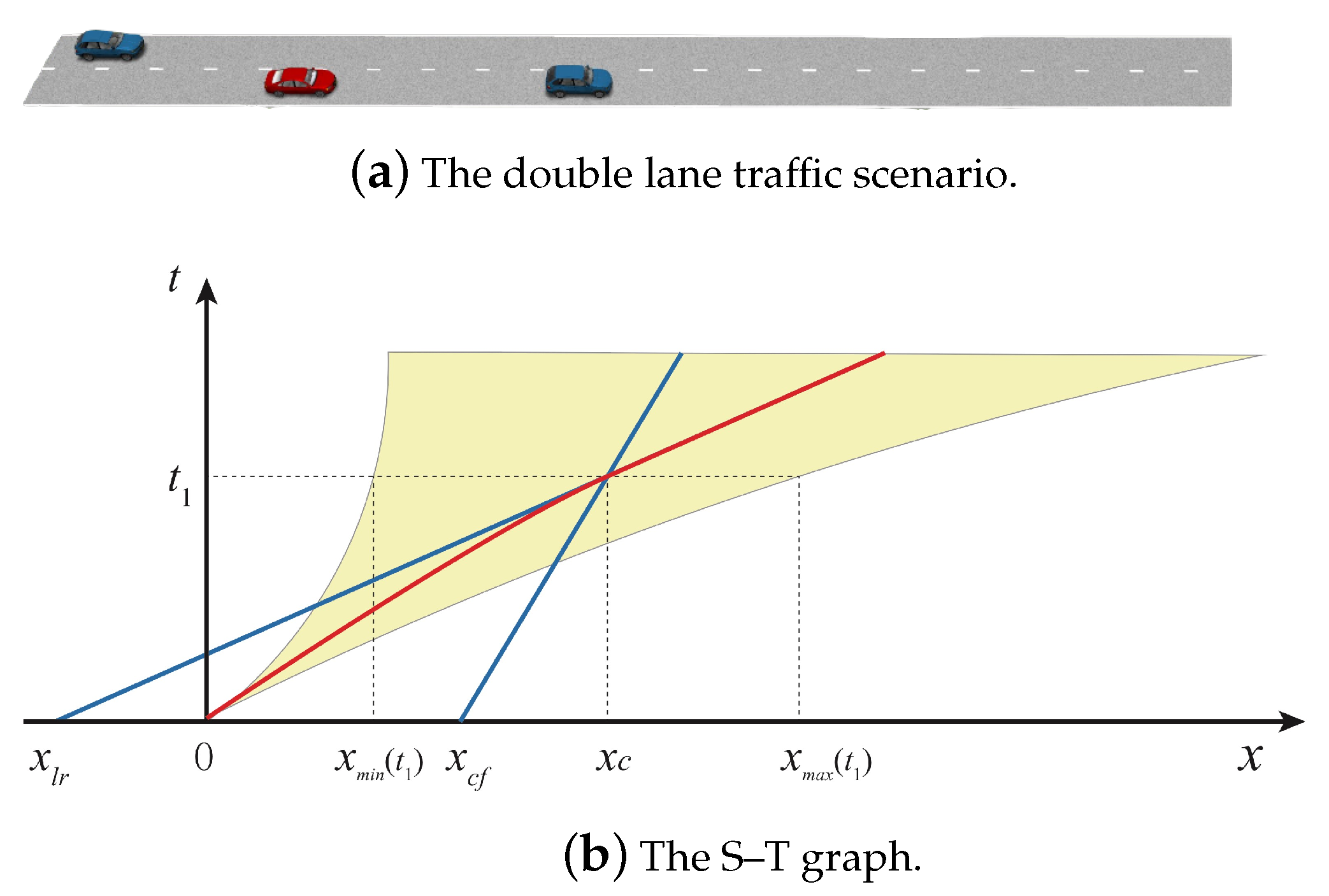
2. Driving Scenario Awareness
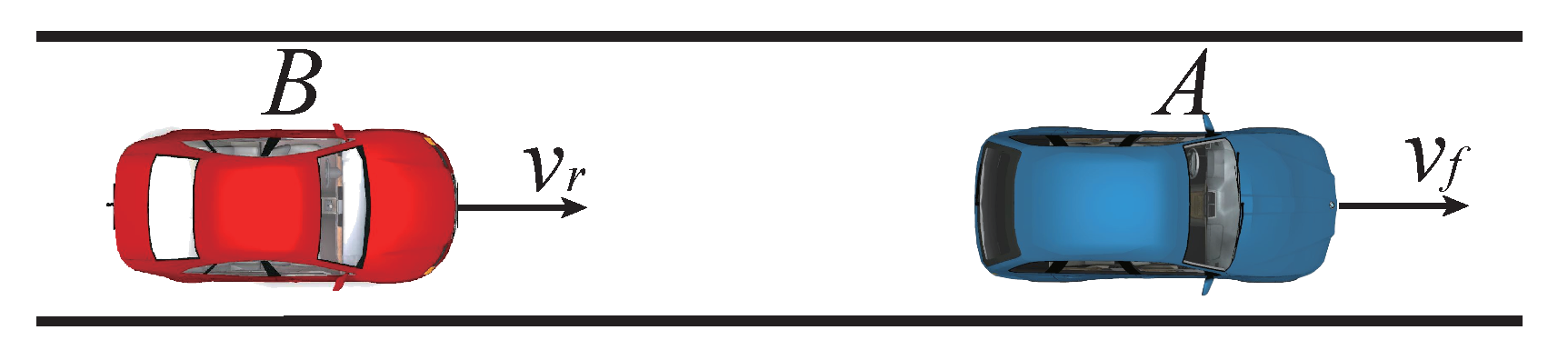
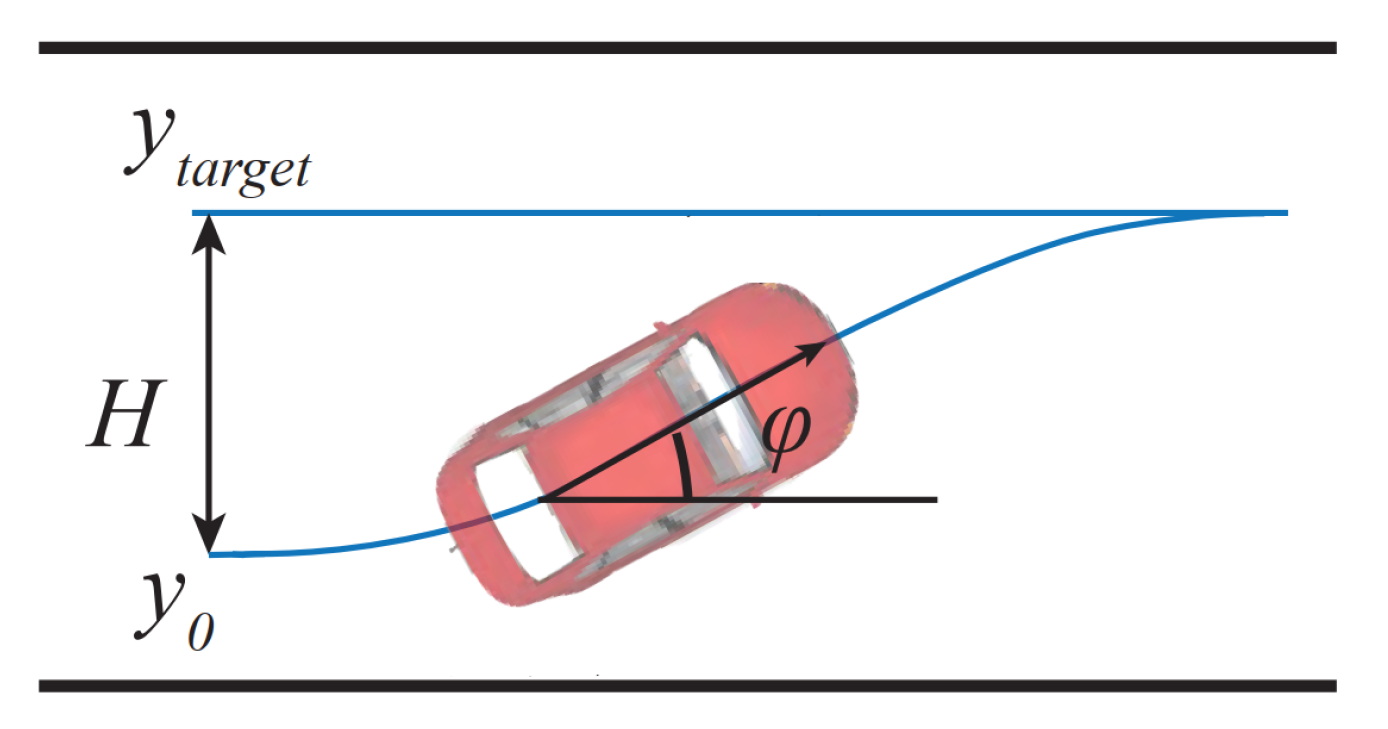
3. Safe Distance for Candidate Driving Maneuvers
3.1. Driving Maneuver of Lane Keeping
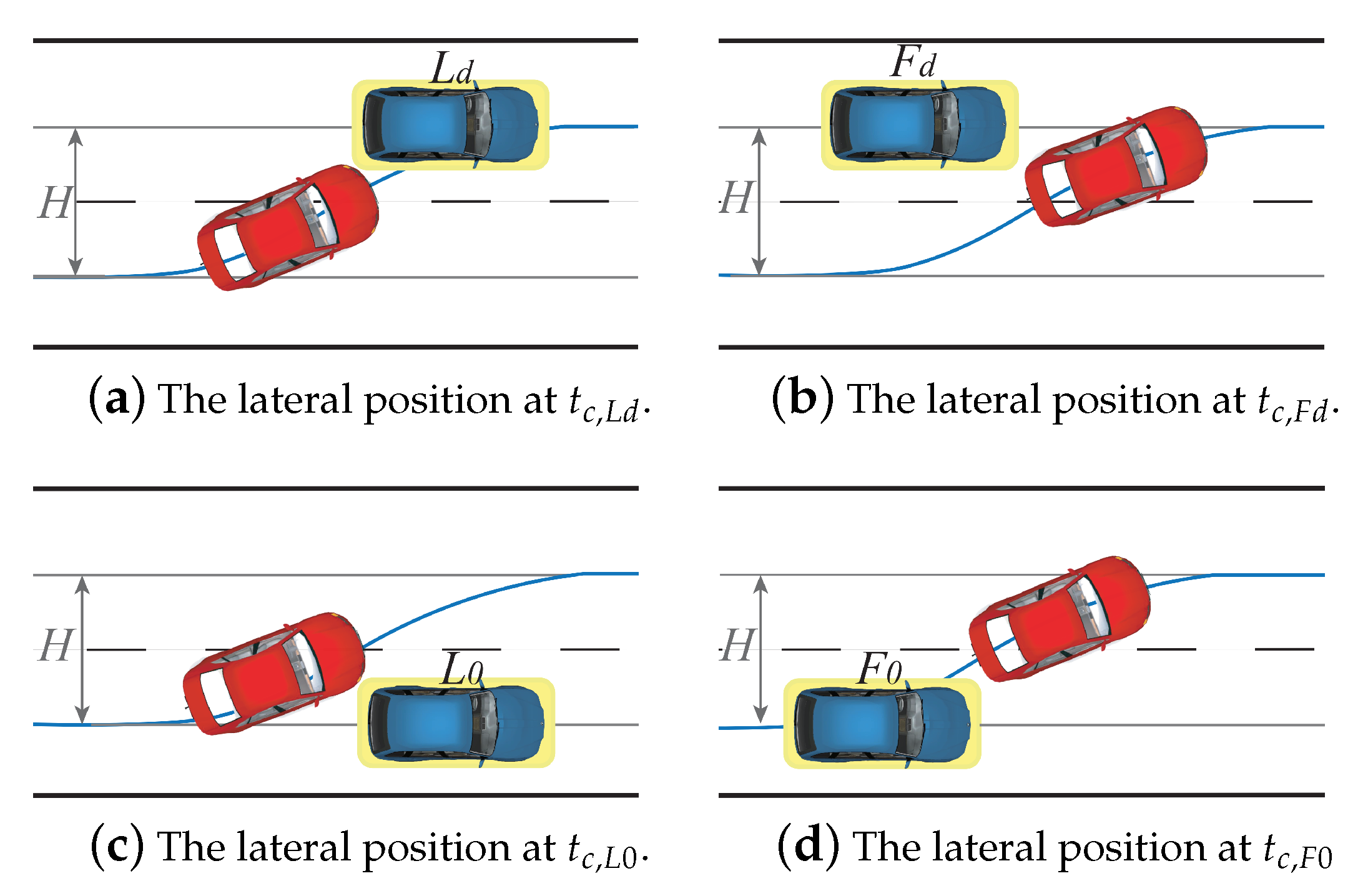
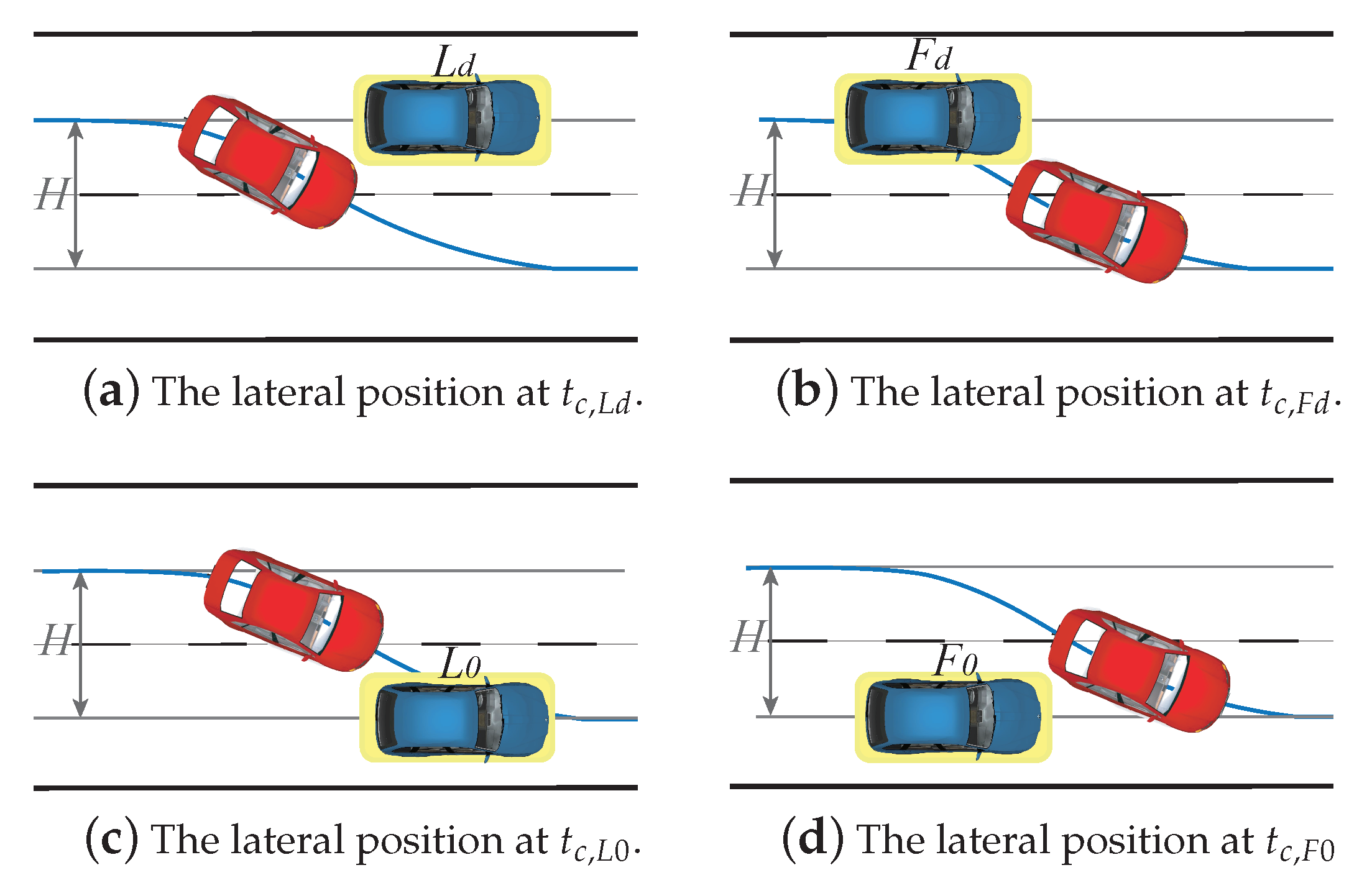
3.2. Driving Maneuver of Lane Change
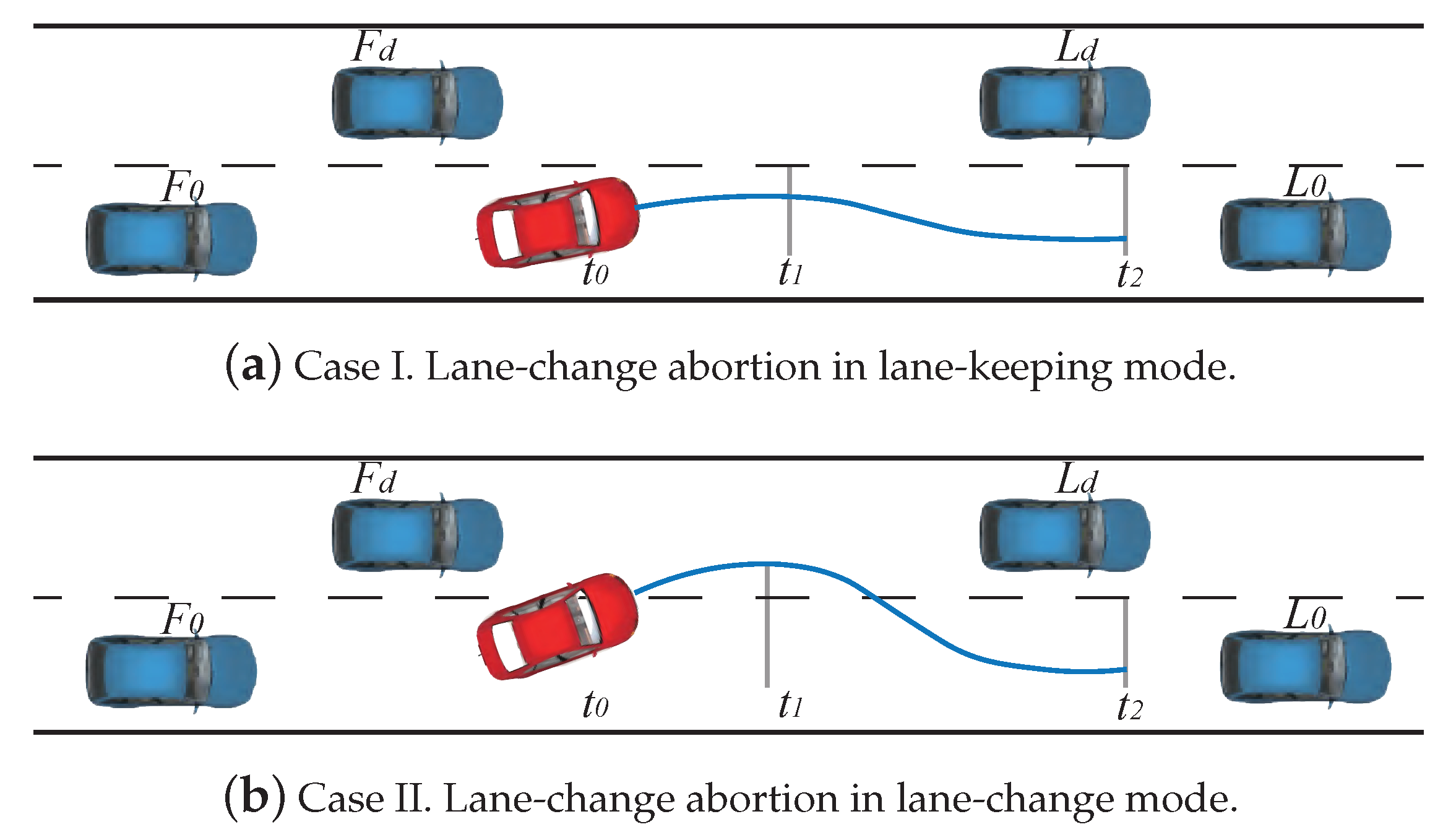
3.3. Driving Maneuver of Canceling Lane Change
4. Evaluation of Candidate Driving Maneuvers
4.1. Elimination of Unreasonable Driving Maneuvers
4.2. Evaluation of Remaining Driving Maneuvers
| Algorithm 1 Maneuver evaluation |
| Input: Candidate maneuvers , state |
| Output: Speed adjustment solution set , longitudinal acceleration range , initiating time interval , cost for each corridor |
|
5. Experiments and Discussion
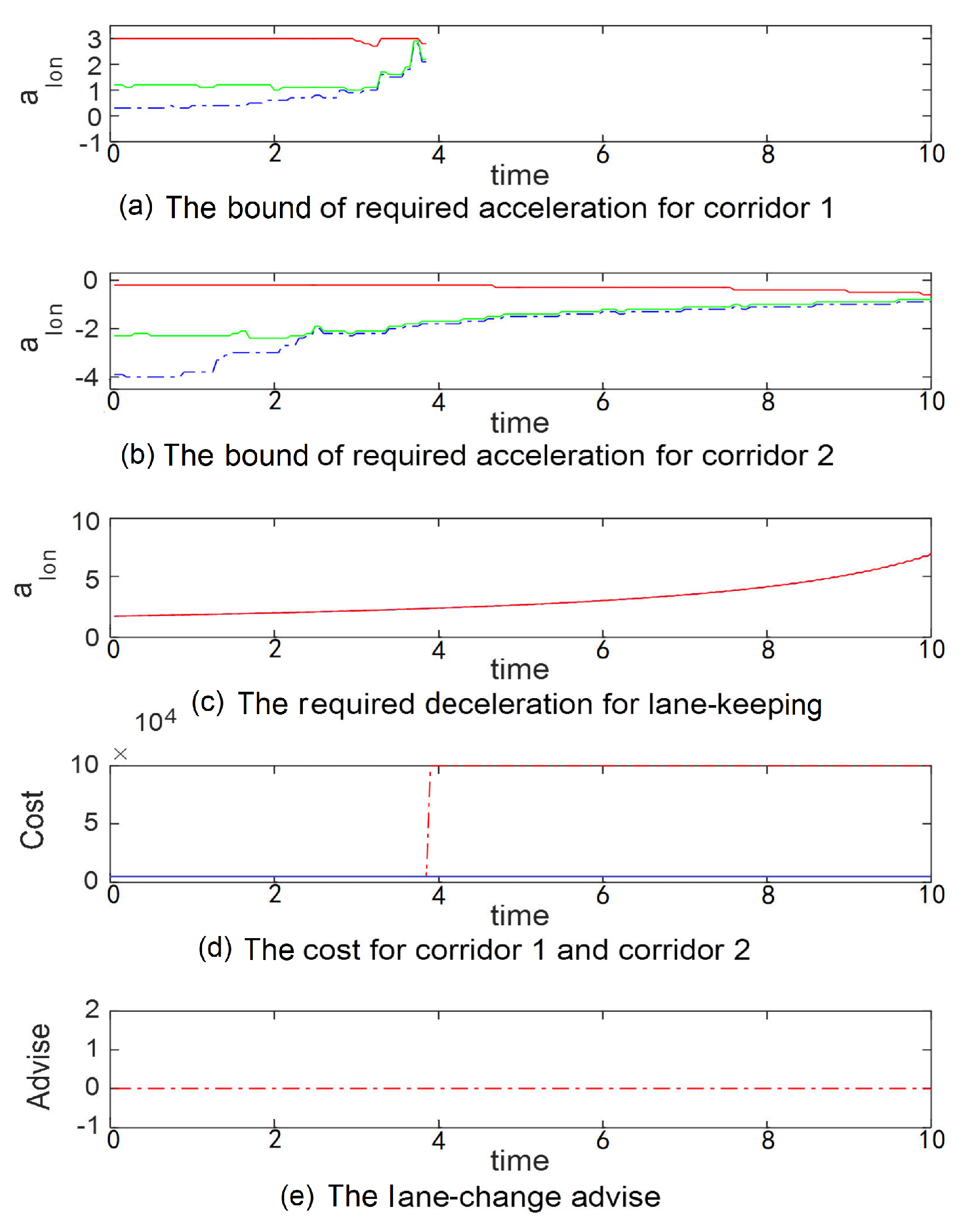
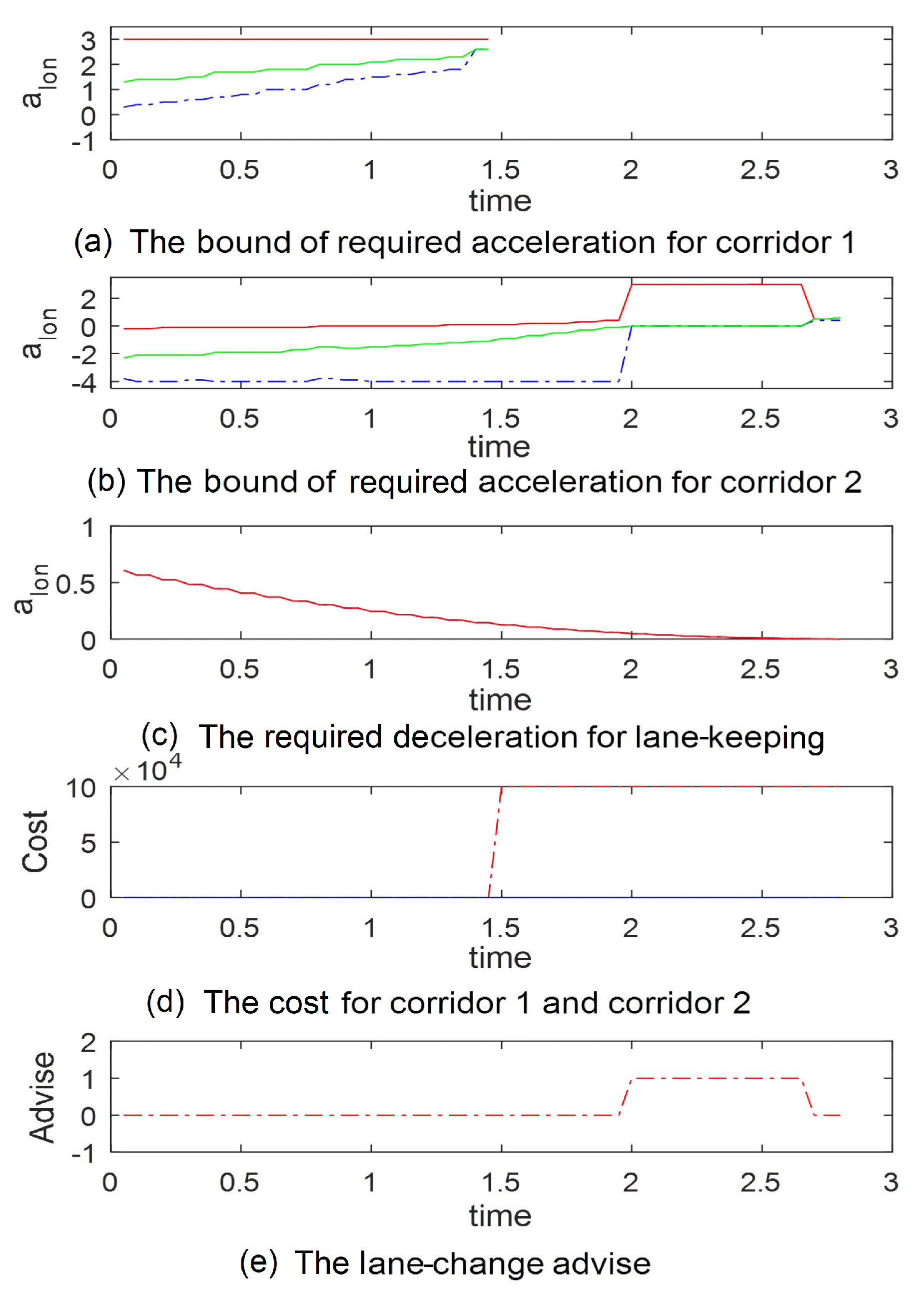
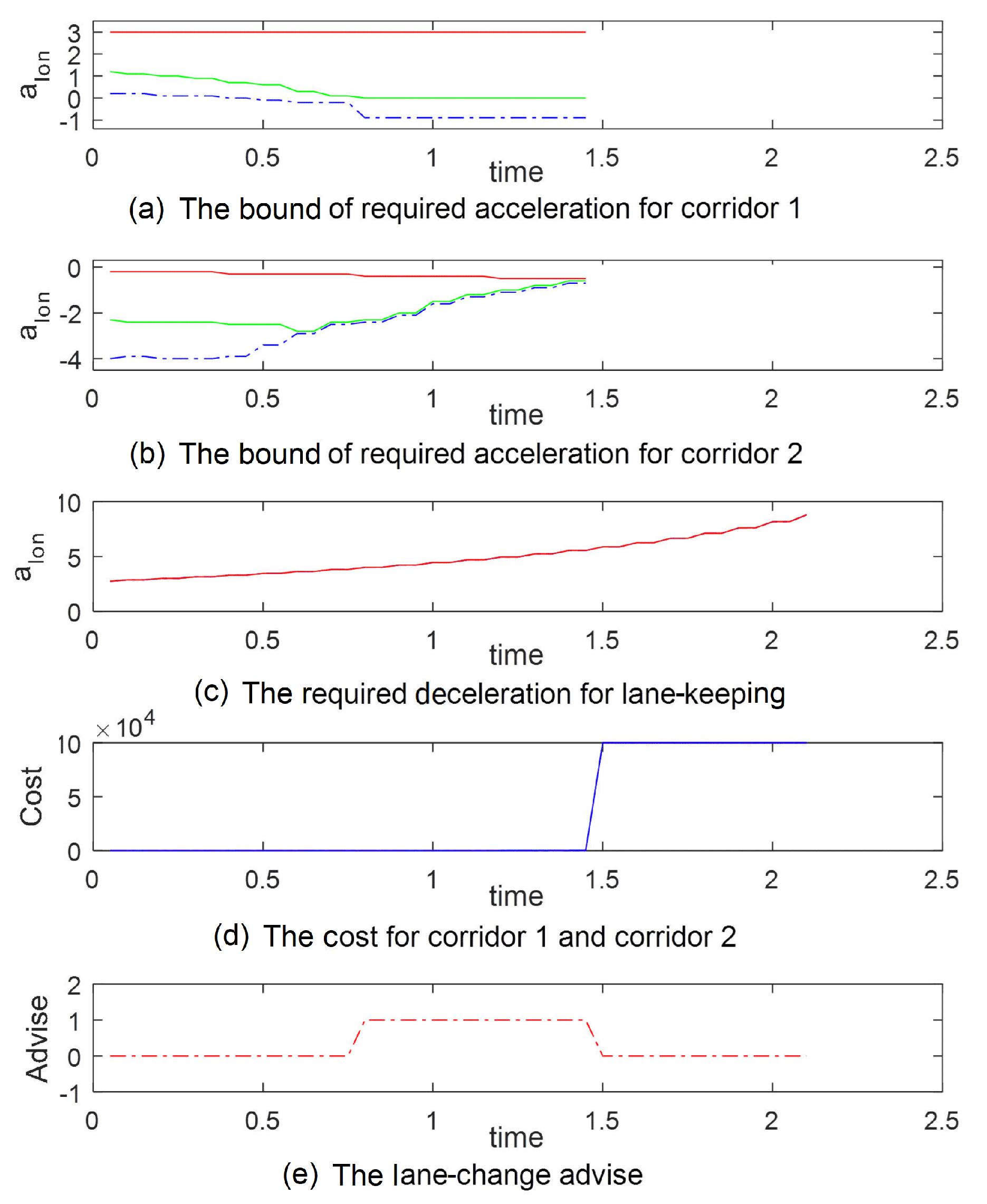
5.1. Driving Maneuver Evaluation before Lane-Change Process
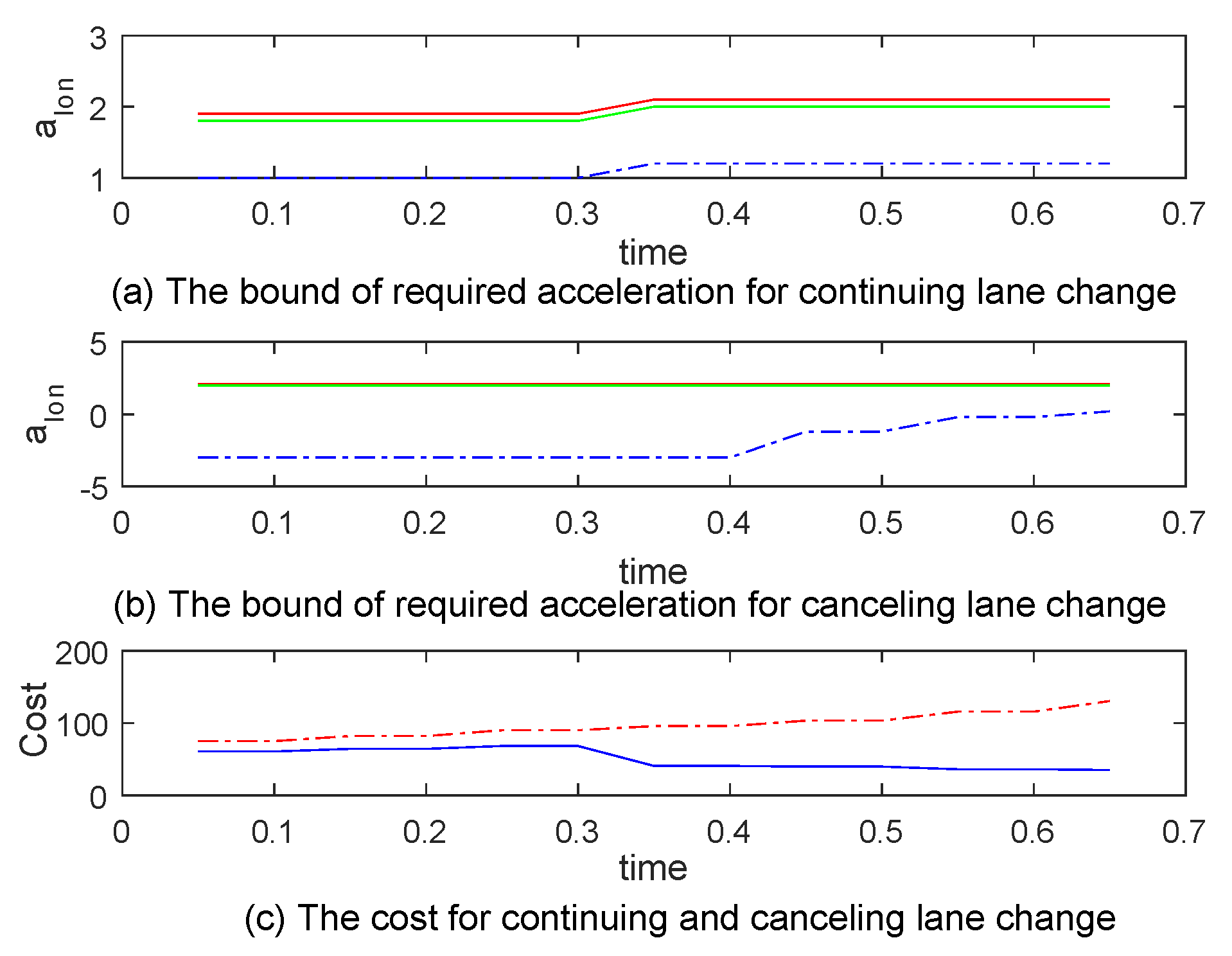
5.2. Driving Maneuver Evaluation during the Lane-Change Process
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- On-Road Automated Vehicle Standards Committee. Taxonomy and definitions for terms related to on-road motor vehicle automated driving systems. SAE Stand. J 2014, 3016, 1–16. [Google Scholar]
- Dikmen, M.; Burns, C.M. Autonomous driving in the real world: Experiences with tesla autopilot and summon. In Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ann Arbor, MI, USA, 24–26 October 2016; pp. 225–228. [Google Scholar]
- Bevly, D.; Martin, S. Navigation in Advanced Driver Assistance Systems and Automated Driving. In Position, Navigation, and Timing Technologies in the 21st Century: Integrated Satellite Navigation, Sensor Systems, and Civil Applications; Wiley: Hoboken, NJ, USA, 2020; pp. 1769–1809. [Google Scholar]
- Tao, J.; Klueck, F.; Felbinger, H.; Nica, M.; Zieher, F.; Wolf, C.; Wang, C. Automated Test Case Generation and Virtual Assessment Framework for UN Regulation on Automated Lane Keeping Systems. In Proceedings of the SAE WCX Digital Summit, Warrendale, PA, USA, 16–18 June 2020. [Google Scholar]
- Erlien, S.M.; Fujita, S.; Gerdes, J.C. Shared steering control using safe envelopes for obstacle avoidance and vehicle stability. IEEE Trans. Intell. Transp. Syst. 2016, 17, 441–451. [Google Scholar] [CrossRef]
- Yan, F.; Eilers, M.; Lüdtke, A.; Baumann, M. Developing a model of driver’s uncertainty in lane change situations for trustworthy lane change decision aid systems. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 406–411. [Google Scholar]
- Koschi, M.; Althoff, M. Interaction-aware occupancy prediction of road vehicles. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–8. [Google Scholar]
- Dagli, I.; Reichardt, D. Motivation-based approach to behavior prediction. In Proceedings of the Intelligent Vehicle Symposium, Versailles, France, 17–21 June 2002; Volume 1, pp. 227–233. [Google Scholar]
- Ahmad, B.I.; Murphy, J.K.; Langdon, P.M.; Godsill, S.J. Bayesian intent prediction in object tracking using bridging distributions. IEEE Trans. Cybern. 2018, 48, 215–227. [Google Scholar] [CrossRef]
- Lefèvre, S.; Vasquez, D.; Laugier, C. A survey on motion prediction and risk assessment for intelligent vehicles. ROBOMECH J. 2014, 1, 1. [Google Scholar] [CrossRef] [Green Version]
- Cesari, G.; Schildbach, G.; Carvalho, A.; Borrelli, F. Scenario model predictive control for lane change assistance and autonomous driving on highways. IEEE Intell. Transp. Syst. Mag. 2017, 9, 23–35. [Google Scholar] [CrossRef]
- Li, J.; Dai, B.; Li, X.; Xu, X.; Liu, D. A Dynamic Bayesian Network for Vehicle Maneuver Prediction in Highway Driving Scenarios: Framework and Verification. Electronics 2019, 8, 40. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Dai, B.; Li, X.; Li, C.; Di, Y. A real-time and predictive trajectory-generation motion planner for autonomous ground vehicles. In Proceedings of the 2017 IEEE 9th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 26–27 August 2017; Volume 2, pp. 108–113. [Google Scholar]
- Noh, S.; Han, W.Y. Collision avoidance in on-road environment for autonomous driving. In Proceedings of the 2014 IEEE 14th International Conference on Control, Automation and Systems (ICCAS 2014), Gyeonggi-Do, Korea, 22–25 October 2014; pp. 884–889. [Google Scholar]
- Laugier, C.; Paromtchik, I.E.; Perrollaz, M.; Yong, M.; Yoder, J.D.; Tay, C.; Mekhnacha, K.; Nègre, A. Probabilistic analysis of dynamic scenes and collision risks assessment to improve driving safety. IEEE Intell. Transp. Syst. Mag. 2011, 3, 4–19. [Google Scholar] [CrossRef] [Green Version]
- Polychronopoulos, A.; Tsogas, M.; Amditis, A.; Scheunert, U.; Andreone, L.; Tango, F. Dynamic situation and threat assessment for collision warning systems: The EUCLIDE approach. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; pp. 636–641. [Google Scholar]
- Polychronopoulos, A.; Tsogas, M.; Amditis, A.J.; Andreone, L. Sensor fusion for predicting vehicles’ path for collision avoidance systems. IEEE Trans. Intell. Transp. Syst. 2007, 8, 549–562. [Google Scholar] [CrossRef]
- Nilsson, J.; Ödblom, A.C.; Fredriksson, J. Worst-case analysis of automotive collision avoidance systems. IEEE Trans. Veh. Technol. 2016, 65, 1899–1911. [Google Scholar] [CrossRef]
- Kim, B.; Park, K.; Yi, K. Probabilistic threat assessment with environment description and rule-based multi-traffic prediction for integrated risk management system. IEEE Intell. Transp. Syst. Mag. 2017, 9, 8–22. [Google Scholar] [CrossRef]
- Noh, S.; An, K. Risk assessment for automatic lane change maneuvers on highways. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 247–254. [Google Scholar]
- Shin, D.; Kim, B.; Yi, K.; Carvalho, A.; Borrelli, F. Human-Centered Risk Assessment of an Automated Vehicle Using Vehicular Wireless Communication. IEEE Trans. Intell. Transp. Syst. 2018, 20, 667–681. [Google Scholar] [CrossRef]
- Pek, C.; Zahn, P.; Althoff, M. Verifying the safety of lane change maneuvers of self-driving vehicles based on formalized traffic rules. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1477–1483. [Google Scholar]
- Hilscher, M.; Linker, S.; Olderog, E.R. Proving Safety of Traffic Manoeuvres on Country Roads. In Theories of Programming and Formal Methods; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8051, pp. 196–212. [Google Scholar]
- Hallerbach, S.; Xia, Y.; Eberle, U.; Köster, F. Simulation-Based Identification of Critical Scenarios for Cooperative and Automated Vehicles. SAE Int. J. Connect. Autom. Veh. 2018, 1, 93–106. [Google Scholar] [CrossRef]
- Mariani, R. An overview of autonomous vehicles safety. In Proceedings of the 2018 IEEE International Reliability Physics Symposium (IRPS), Burlingame, CA, USA, 11–15 March 2018; p. 6A-1. [Google Scholar]
- Jula, H.; Kosmatopoulos, E.B.; Ioannou, P.A. Collision avoidance analysis for lane changing and merging. IEEE Trans. Veh. Technol. 2000, 49, 2295–2308. [Google Scholar] [CrossRef] [Green Version]
- Simcenter Prescan. Available online: https://tass.plm.automation.siemens.com/prescan/.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kinematic Constraints | Description |
|---|---|
| Maximum lateral acceleration | |
| Maximum longitudinal acceleration | |
| Minimum longitudinal acceleration | |
| Maximum longitudinal speed | |
| Minimum longitudinal speed |
| Parameter | Value |
|---|---|
| The initial velocity of the host vehicle | 40 km/h |
| The velocity of other vehicles on the right lane | 30 km/h |
| The velocity of other vehicles on the left lane | 36 km/h |
| Threshold | 2 s |
| 3 m/s | |
| −4 m/s | |
| 100 km/h | |
| 0 km/h | |
| 5 s |
| Parameter | Value |
|---|---|
| The initial velocity of the host vehicle | 36 km/h |
| The velocity of other vehicles in the right lane | 36 km/h |
| The velocity of other vehicles in the left lane | 54 km/h |
| 3 m/s | |
| −4 m/s | |
| 100 km/h | |
| 0 km/h | |
| 5 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, B.; Li, X.; Zeng, Y.; Liu, D. A Maneuver Evaluation Algorithm for Lane-Change Assistance System. Electronics 2021, 10, 774. https://doi.org/10.3390/electronics10070774
Jiang B, Li X, Zeng Y, Liu D. A Maneuver Evaluation Algorithm for Lane-Change Assistance System. Electronics. 2021; 10(7):774. https://doi.org/10.3390/electronics10070774
Chicago/Turabian StyleJiang, Bohan, Xiaohui Li, Yujun Zeng, and Daxue Liu. 2021. "A Maneuver Evaluation Algorithm for Lane-Change Assistance System" Electronics 10, no. 7: 774. https://doi.org/10.3390/electronics10070774
APA StyleJiang, B., Li, X., Zeng, Y., & Liu, D. (2021). A Maneuver Evaluation Algorithm for Lane-Change Assistance System. Electronics, 10(7), 774. https://doi.org/10.3390/electronics10070774