
A Simulated Annealing Algorithm and Grid Map-Based UAV Coverage Path Planning Method for 3D Reconstruction


Abstract
:1. Introduction
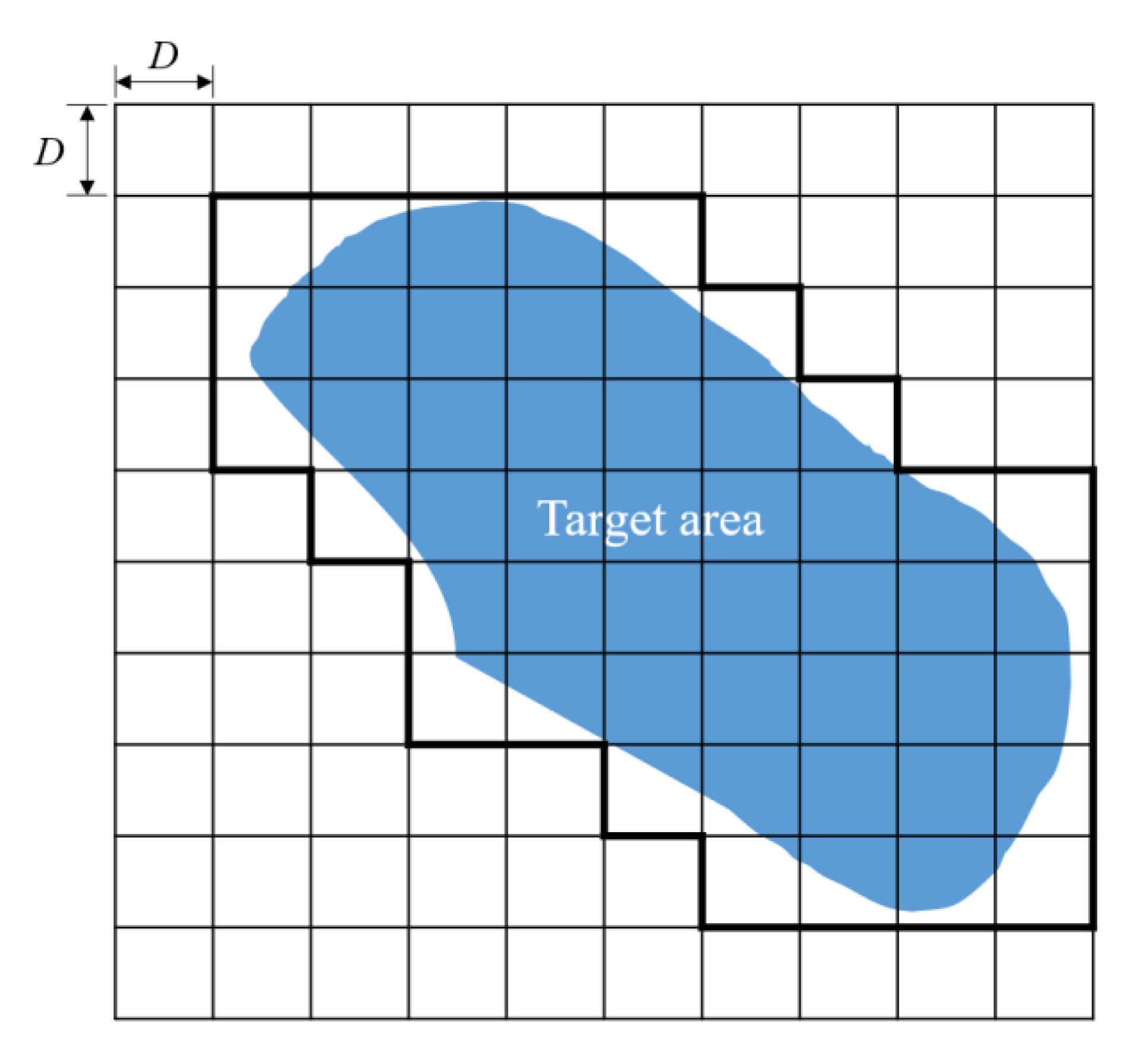
- A map decomposition and area division method: the irregular target area is decomposed into many square cells with specified side lengths, which can guarantee image overlap. A ray-scan-based method is also introduced to perform approximate task allocation to ensure balanced energy consumption of the UAV formation.
- Near-optimized path calculation: the simulated annealing algorithm (SAA) is utilized to calculate near-optimized paths in every subarea, resulting in lower energy consumption of UAVs. In addition, collision-free paths are automatically generated through task allocation and path calculation.
- Site experiment validation: the efficiency of the proposed method is validated through a site experiment, and a self-developed system is used to guarantee the precision of the experiments.
2. Methodology
- There are no large or tall obstacles in the target area that may cause safety problems for the UAVs. Some brief terrain information of the target area should be known before the flights to prevent collisions between the vehicle and environment.
- The whole target area should be relatively flat, and the terrain should not show distinctive changes. Since UAVs fly at a fixed altitude, abrupt changes in the terrain may affect the overlap ratios of different images.
- The path length is the only variable that influences the energy consumption of UAVs. In this research, UAVs fly and take photos at a fixed altitude with a constant speed, which means the path length will decide energy consumptions directly. Therefore, one of the main goals of this research is to find almost the shortest paths for the clustered UAVs.
2.1. Map Decomposition
2.1.1. Partitioning the Map
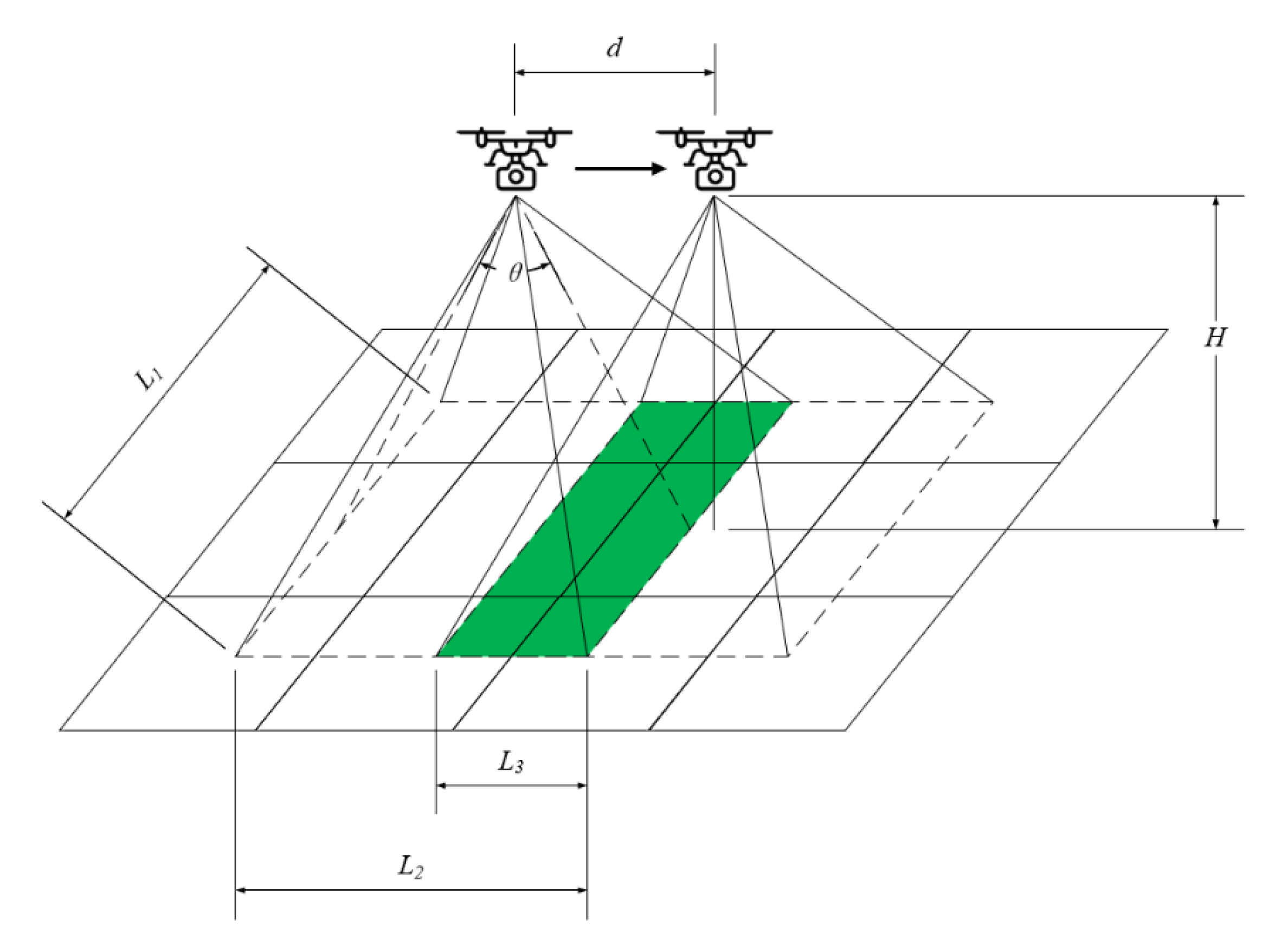
2.1.2. Cell Side Length Calculation
2.2. Task Area Division
2.2.1. Energy Consumption Assumption
2.2.2. Take-Off Location Selection
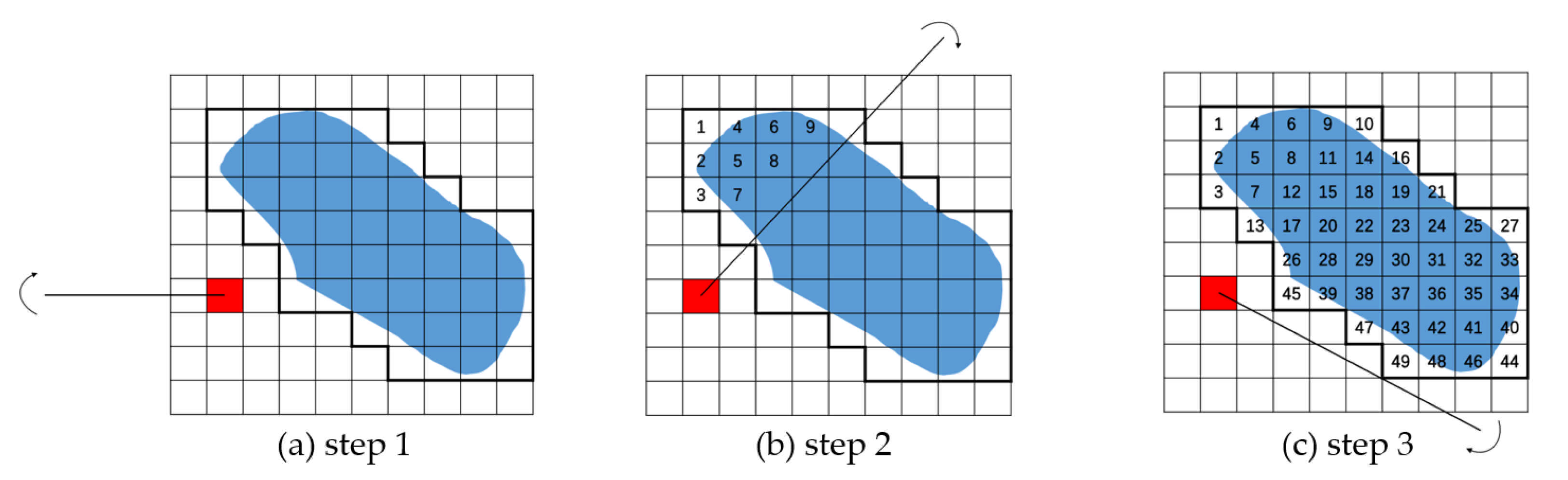
2.2.3. Area Scan and Segmentation
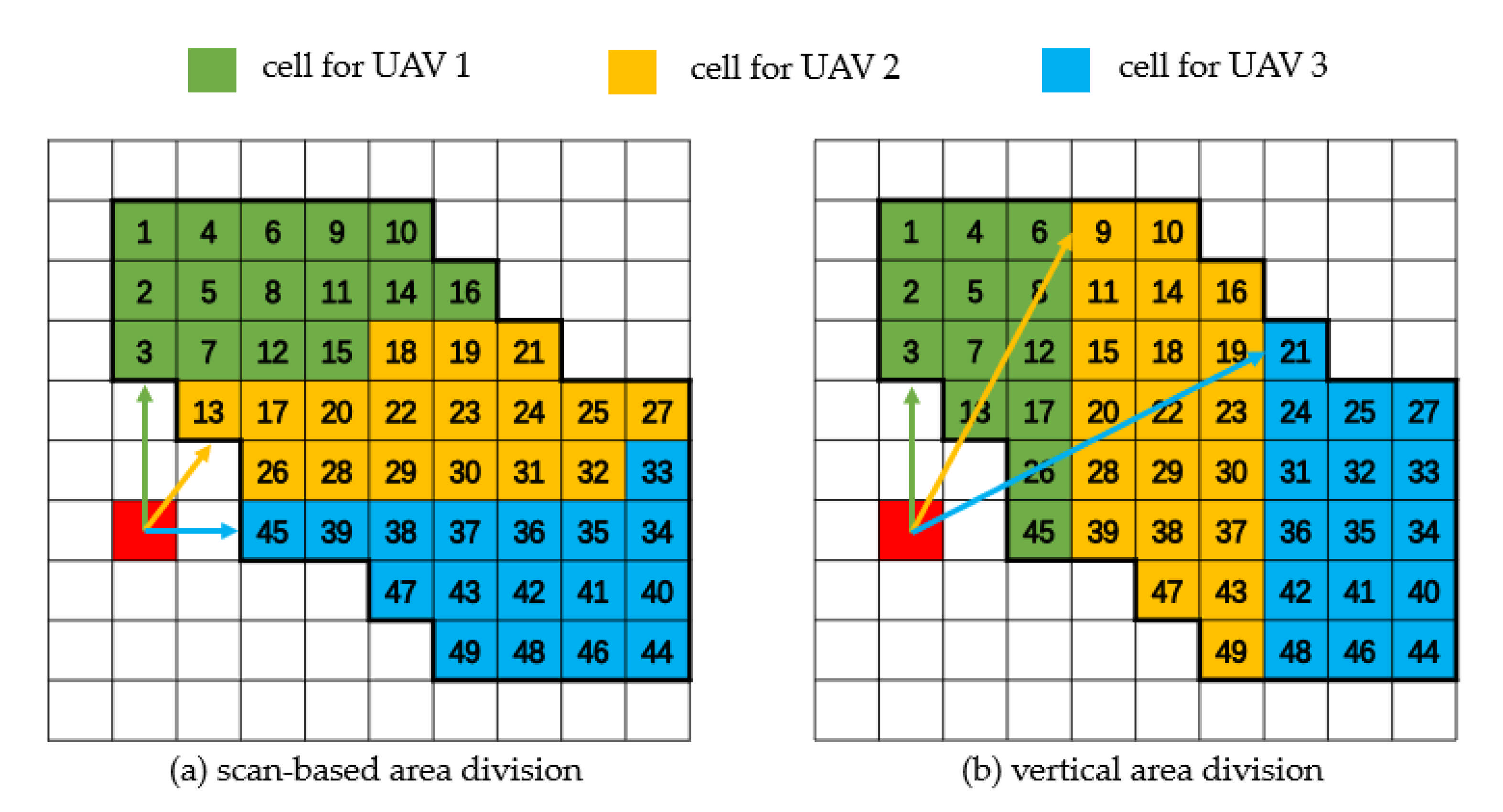
2.2.4. Comparison between Scan-Based Area Division and Vertical Area Division
2.3. Simulated Annealing Algorithm-Based Path Planning
2.3.1. Take-off Location Based Coordinate System
2.3.2. Near-Optimized Path Calculation
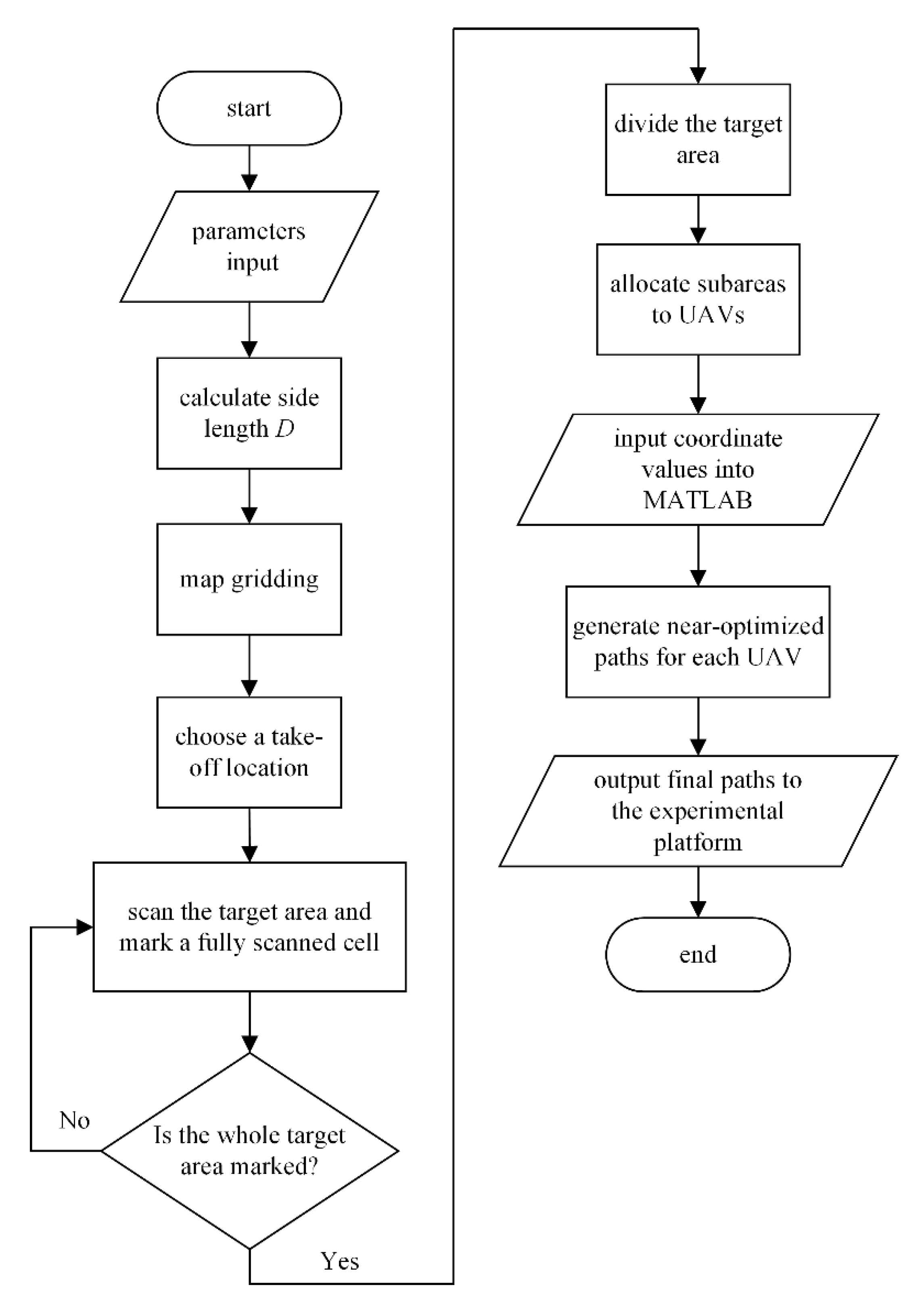
2.4. Workflow of the System
3. Site Experiment
3.1. Experimental Platform
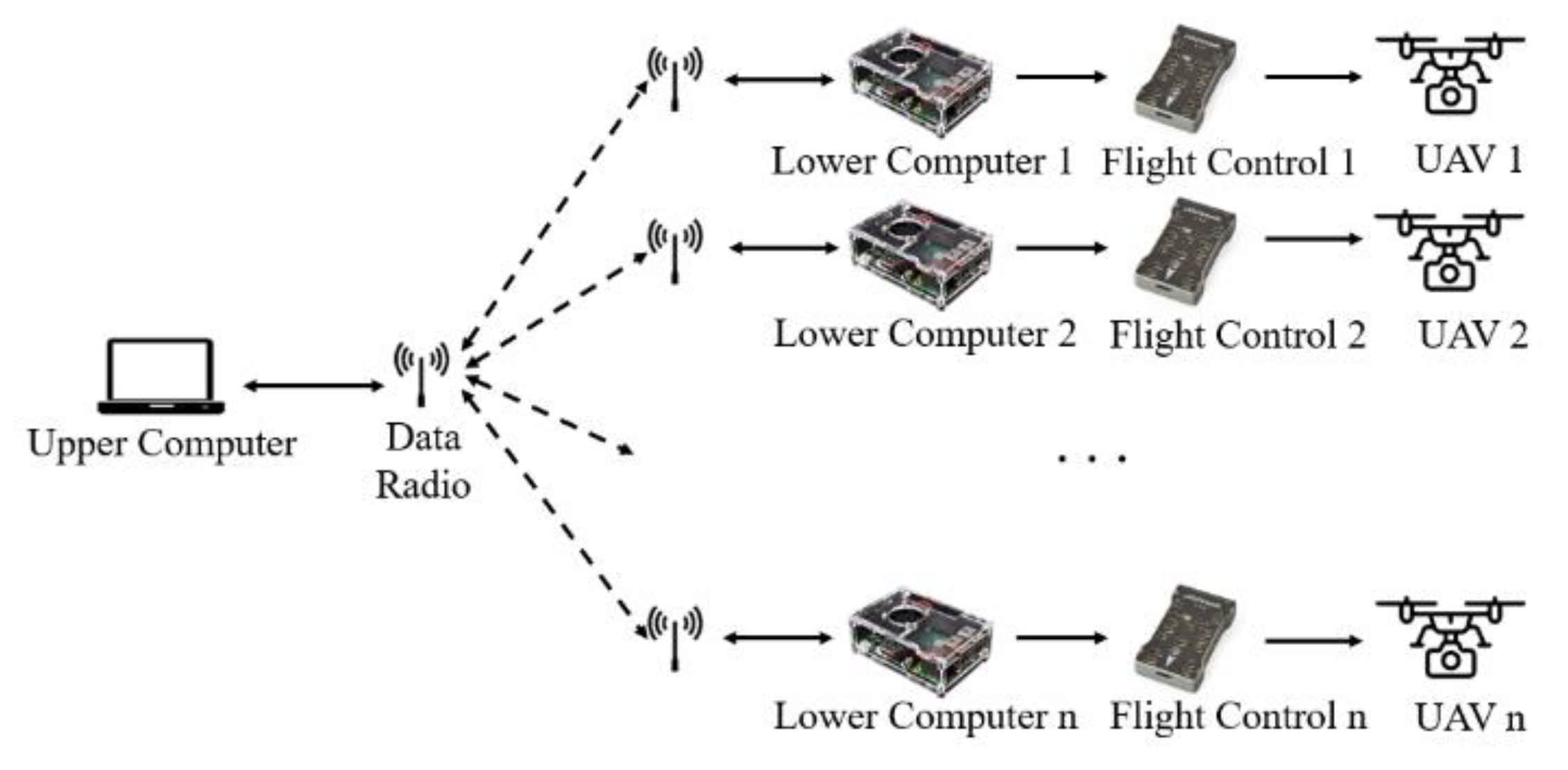
3.1.1. Formation Control System
3.1.2. UAV Platform
3.2. Experimental Results
3.2.1. Experimental Subject and Parameters
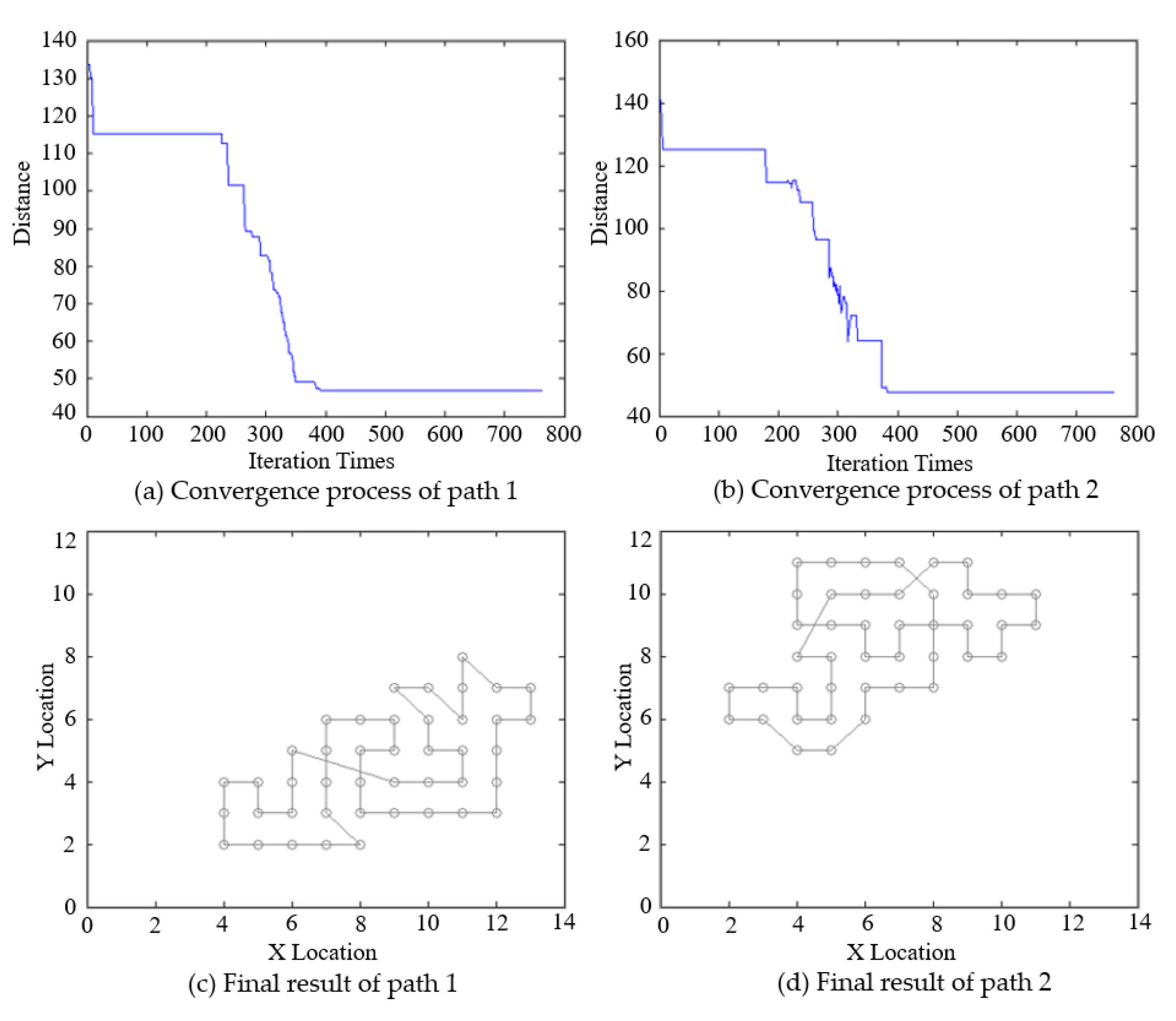
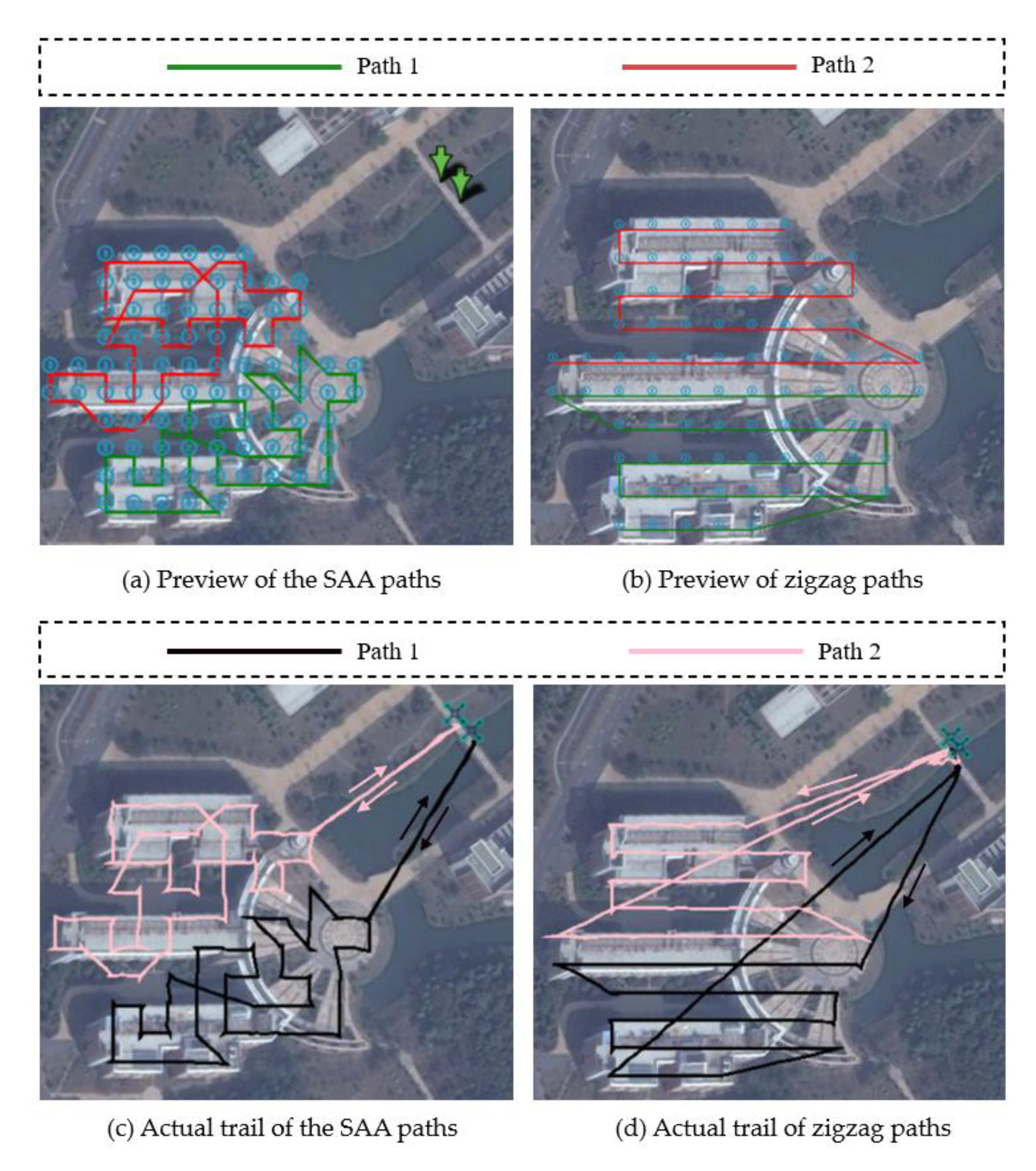
3.2.2. Experimental Paths
3.2.3. Reconstructed Model
4. Conclusions and Future Work
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Zhou, X.; Yi, Z.; Liu, Y.; Huang, K.; Huang, H. Survey on path and view planning for UAVs. Virtual Real. Intell. Hardw. 2020, 2, 56–69. [Google Scholar] [CrossRef]
- Gerke, M.; Kerle, N. Automatic Structural Seismic Damage Assessment with Airborne Oblique Pictometry© Imagery. Photogramm. Eng. Remote. Sens. 2011, 77, 885–898. [Google Scholar] [CrossRef]
- Carvajal-Ramírez, F.; Navarro-Ortega, A.D.; Aguera-Vega, F.; Martínez-Carricondo, P.; Mancini, F. Virtual reconstruc-tion of damaged archaeological sites based on unmanned aerial vehicle photogrammetry and 3d modelling. study case of a southeastern Iberia production area in the bronze age. Measurement 2019, 136, 225–236. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef] [Green Version]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef] [Green Version]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Bianco, S.; Ciocca, G.; Marelli, D. Evaluating the Performance of Structure from Motion Pipelines. J. Imaging 2018, 4, 98. [Google Scholar] [CrossRef] [Green Version]
- Huang, W. Optimal line-sweep-based decompositions for coverage algorithms. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; pp. 27–32. [Google Scholar]
- Torres, M.; Pelta, D.A.; Verdegay, J.L.; Torres, J.C. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction. Expert Syst. Appl. 2016, 55, 441–451. [Google Scholar] [CrossRef]
- Xie, J.; Carrillo, L.R.G.; Jin, L. Path Planning for UAV to Cover Multiple Separated Convex Polygonal Regions. IEEE Access 2020, 8, 51770–51785. [Google Scholar] [CrossRef]
- Khanam, Z.; Saha, S.; Ehsan, S.; Stolkin, R.; McDonald-Maier, K. Coverage Path Planning Techniques for Inspection of Disjoint Regions With Precedence Provision. IEEE Access 2021, 9, 5412–5427. [Google Scholar] [CrossRef]
- Guastella, D.C.; Cantelli, L.; Giammello, G.; Melita, C.D.; Spatino, G.; Muscato, G. Complete coverage path planning for aerial vehicle flocks deployed in outdoor environments. Comput. Electr. Eng. 2019, 75, 189–201. [Google Scholar] [CrossRef]
- Barrientos, A.; Colorado, J.; Del Cerro, J.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef] [Green Version]
- Zheng, X.; Wang, F.; Xia, J.; Gong, X. The methodology of UAV route planning for efficient 3D reconstruction of building model. In Proceedings of the 2017 25th International Conference on Geoinformatics, Buffalo, NY, USA, 2–4 August 2017; pp. 1–4. [Google Scholar]
- Zheng, X.; Wang, F.; Li, Z. A multi-UAV cooperative route planning methodology for 3D fine-resolution building model reconstruction. ISPRS J. Photogramm. Remote. Sens. 2018, 146, 483–494. [Google Scholar] [CrossRef]
- Mansouri, S.S.; Kanellakis, C.; Fresk, E.; Kominiak, D.; Nikolakopoulos, G. Cooperative coverage path planning for visual inspection. Control. Eng. Pr. 2018, 74, 118–131. [Google Scholar] [CrossRef]
- Wang, H.; Li, H.; Zhang, C.; He, S.; Liu, J. A 3D coverage path planning approach for flying cameras in nature environment under photogrammetric constraints. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dailan, China, 26–28 July 2017; pp. 6761–6766. [Google Scholar]
- Lin, L.; Goodrich, M.A. Hierarchical Heuristic Search Using a Gaussian Mixture Model for UAV Coverage Planning. IEEE Trans. Cybern. 2014, 44, 2532–2544. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Sun, M.; Zhou, H.; Liu, S. A Multi-Robot Coverage Path Planning Algorithm for the Environment With Multiple Land Cover Types. IEEE Access 2020, 8, 198101–198117. [Google Scholar] [CrossRef]
- Lienard, J.; Vogs, A.; Gatziolis, D.; Strigul, N. Embedded, real-time UAV control for improved, image-based 3d scene reconstruction. Measurement 2016, 81, 264–269. [Google Scholar] [CrossRef]
- Yang, C.-H.; Tsai, M.-H.; Kang, S.-C.; Hung, C.-Y. UAV path planning method for digital terrain model reconstruction—A debris fan example. Autom. Constr. 2018, 93, 214–230. [Google Scholar] [CrossRef]
- Samaniego, F.; Sanchis, J.; García-Nieto, S.; Simarro, R. Recursive Rewarding Modified Adaptive Cell Decomposition (RR-MACD): A Dynamic Path Planning Algorithm for UAVs. Electronics 2019, 8, 306. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Number of UAVs | 2 |
| Flight height (m) | 70 |
| Field of view angle (°) | 98.7 |
| Angle of inclination (°) | 90 |
| Image overlap ratio | 80% |
| Cell side length (m) | 14 |
| Initial temperature of the SAA (℃) | 500 |
| Final temperature of the SAA (℃) | 10−4 |
| Iteration times | 764 |
| Path Planning Method | SAA Method | Zigzag Method |
|---|---|---|
| Length of path 1 (m) | 857.3 | 1014.3 |
| Length of path 2 (m) | 844.3 | 932.9 |
| Path length difference (m) | 13.0 | 81.4 |
| Flight time of path 1 (s) | 311 | 348 |
| Flight time of path 2 (s) | 303 | 324 |
| Path 1 length reduction | 15.4% | |
| Path 2 length reduction | 9.5% | |
| Total length reduction | 12.6% | |
| Time reduction of path 1 | 10.6% | |
| Time reduction of path 2 | 6.5% | |
| Total time reduction | 8.6% | |
| Path Planning Method | SAA Method (m) | Zigzag Method (m) |
|---|---|---|
| Length of forward path 1 | 100.9 | 112.9 |
| Length of forward path 2 | 93.9 | 115.4 |
| Length of inner path 1 | 655.5 | 663.0 |
| Length of inner path 2 | 656.5 | 591.3 |
| Length of backward path 1 | 100.9 | 238.4 |
| Length of backward path 2 | 93.9 | 226.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, S.; Tan, X.; Wang, J. A Simulated Annealing Algorithm and Grid Map-Based UAV Coverage Path Planning Method for 3D Reconstruction. Electronics 2021, 10, 853. https://doi.org/10.3390/electronics10070853
Xiao S, Tan X, Wang J. A Simulated Annealing Algorithm and Grid Map-Based UAV Coverage Path Planning Method for 3D Reconstruction. Electronics. 2021; 10(7):853. https://doi.org/10.3390/electronics10070853
Chicago/Turabian StyleXiao, Sichen, Xiaojun Tan, and Jinping Wang. 2021. "A Simulated Annealing Algorithm and Grid Map-Based UAV Coverage Path Planning Method for 3D Reconstruction" Electronics 10, no. 7: 853. https://doi.org/10.3390/electronics10070853
APA StyleXiao, S., Tan, X., & Wang, J. (2021). A Simulated Annealing Algorithm and Grid Map-Based UAV Coverage Path Planning Method for 3D Reconstruction. Electronics, 10(7), 853. https://doi.org/10.3390/electronics10070853