
Using KNN Algorithm Predictor for Data Synchronization of Ultra-Tight GNSS/INS Integration


 ,
,  and
and
Abstract
:1. Introduction
2. Mathematical Models for GNSS/INS Integration
2.1. K Nearest Neighbor (KNN) Predictor Algorithm
2.2. Kalman Filter (KF)
- Filter estimate
- Filter gain
- Error covariancewhereF(k): n × n state transition matrixK(k): n × 1 Kalman gain vectorQ(k): n × 1 covariance matrix of the system noise vectorR(k): m × 1 covariance of the measurement noise vectorH(k): m × n observation matrixP(k): n × n covariance matrix of the state vector
2.3. Ultra-Tightly Coupled Integration of GNSS/INS
3. Simulation Results
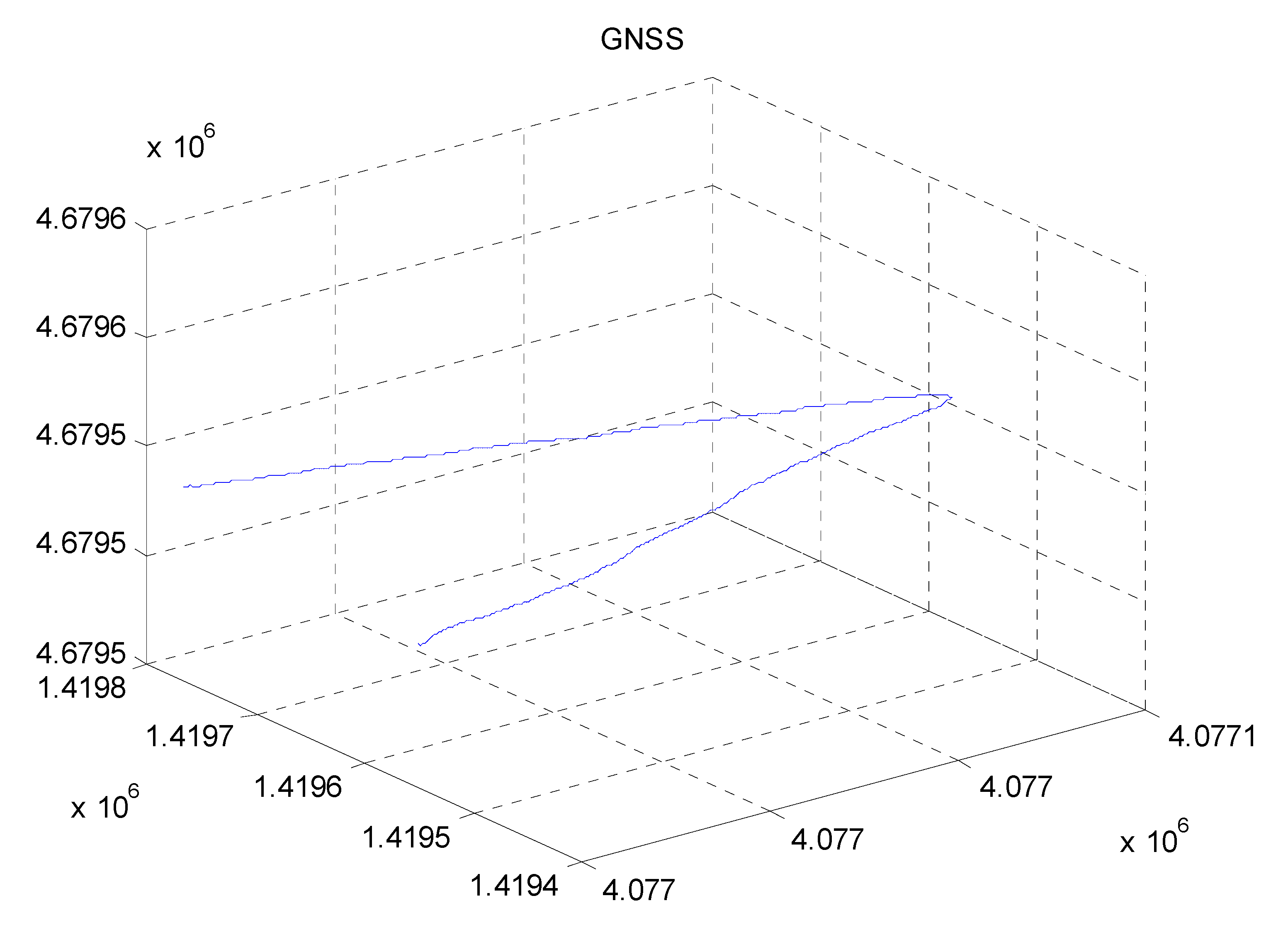
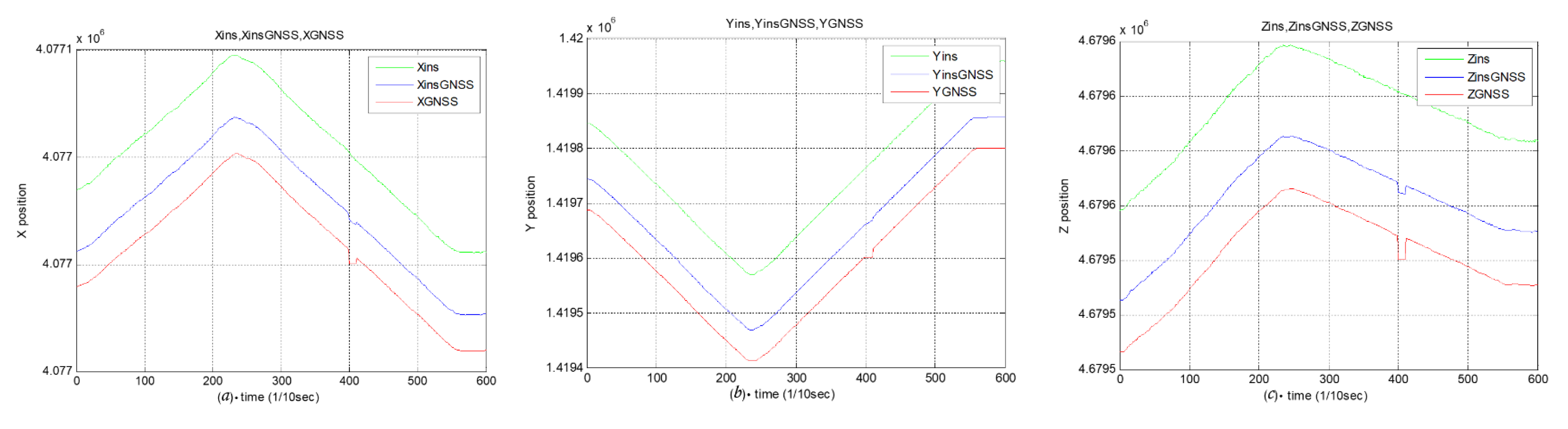
- Scenario (І):
- This scenario compares the positions in three coordinates (X, Y, Z) for INS, GNSS, and the integration of GNSS/INS without blocking the GNSS data (see Figure 4).
- Scenario (II):
- This scenario is like Scenario (I) but with a blocking time of 1 s in the GNSS receiver (see Figure 5).
- Scenario (III):
- This scenario is like Scenario (II), but with a blocking time of 4 s in the GNSS receiver (see Figure 6).
- Scenario (ІV):
- This scenario is like Scenario (III), but with a blocking time of 8 s in the GNSS receiver (see Figure 7).
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Meng, Y.; Gao, S.; Zhong, Y.; Hu, G.; Subic, A. Covariance matching based adaptive unscented Kalman filter for direct filtering in INS/GNSS integration. Acta Astronaut. 2016, 120, 171–181. [Google Scholar] [CrossRef]
- Hu, G.; Wang, W.; Zhong, Y.; Gao, B.; Gu, C. A new direct filtering approach to INS/GNSS integration. Aerosp. Sci. Technol. 2018, 77, 755–764. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: Boston, MA, USA, 2013; ISBN 978-1-60807-005-3. [Google Scholar]
- Wang, W.; Liu, Z.Y.; Xie, R. rong Quadratic extended Kalman filter approach for GPS/INS integration. Aerosp. Sci. Technol. 2006, 10, 709–713. [Google Scholar] [CrossRef]
- Hu, G.; Gao, S.; Zhong, Y.; Gao, B.; Subic, A. Modified federated Kalman filter for INS/GNSS/CNS integration. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 30–44. [Google Scholar] [CrossRef]
- Quan, W.; Li, J.; Gong, X.; Fang, J. INS/CNS/GNSS Integrated Navigation Technology; Springer: Berlin/Heidelberg, Germany, 2015; ISBN 978-3-662-45158-8. [Google Scholar] [CrossRef]
- Noureldin, A.; Karamat, T.B.; Eberts, M.D.; El-Shafie, A. Performance enhancement of MEMS-based INS/GPS integration for low-cost navigation applications. IEEE Trans. Veh. Technol. 2009, 58, 1077–1096. [Google Scholar] [CrossRef]
- Nemra, A.; Aouf, N. Robust INS/GPS sensor fusion for UAV localization using SDRE nonlinear filtering. IEEE Sens. J. 2010, 10, 789–798. [Google Scholar] [CrossRef] [Green Version]
- Fang, J.; Gong, X. Predictive iterated kalman filter for INS/GPS integration and its application to SAR motion compensation. IEEE Trans. Instrum. Meas. 2010, 59, 909–915. [Google Scholar] [CrossRef]
- Abbott, A.S.; Lillo, W.E. Global Positioning Systems and Inertial Measuring Unit Ultratight Coupling Method. U.S. Patent 6516021B1, 4 February 2003. [Google Scholar]
- Falco, G.; Pini, M.; Marucco, G. Loose and tight GNSS/INS integrations: Comparison of performance assessed in real Urban scenarios. Sensors 2017, 17, 255. [Google Scholar] [CrossRef] [PubMed]
- Bernal, D.; Closas, P.; Fernández-Rubio, J.A. Particle filtering algorithm for ultra-tight GNSS/INS integration. In Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS 2008, Savannah, GA, USA, 16–19 September 2008; Volume 1, pp. 239–246. [Google Scholar]
- Abdul-kaliq Abdul-aziez, S.; Yass, M.; Jassim Mohammed, H. NLMS Adaptive Filter Algorithm Method for GPS Data Prediction; IAJS: Baghdad, Iraq, 2016; Volume 6. [Google Scholar]
- Mahel Mohammed, F.; Aziez, S.A.; Naji Abdul-Rihda, H. Comparison between Wavelet and Radial Basis Function Neural Networks for GPS Prediction; IAJS: Baghdad, Iraq, 2015. [Google Scholar]
- Li, Z.; Zhang, T.; Qi, F.; Tang, H.; Niu, X. Carrier phase prediction method for GNSS precise positioning in challenging environment. Adv. Space Res. 2019, 63, 2164–2174. [Google Scholar] [CrossRef]
- Kaghyan, S.; Sarukhanyan, H. Activity recognition using K-nearest neighbor algorithm on smartphone with Tri-axial accelerometer. Int. J. Inform. Models Anal. 2012, 1, 146–156. [Google Scholar]
- Sinta, D.; Wijayanto, H.; Sartono, B. Ensemble K-Nearest neighbors method to predict rice price in Indonesia. Appl. Math. Sci. 2014, 8, 7993–8005. [Google Scholar] [CrossRef] [Green Version]
- Imandoust, S.B.; Bolandraftar, M. Application of K-Nearest Neighbor (KNN) Approach for Predicting Economic Events: Theoretical Background. Int. J. Eng. Res. Appl. 2013, 3, 605–610. [Google Scholar]
- Grewal, M.S.; Andrews, A.P. Kalman Filtering: Theory and Practice with MATLAB, 4th ed.; Wiley-IEEE Press: Hoboken, NJ, USA, 2014; ISBN 1118851218. [Google Scholar]
- Ribeiro, M.I. Kalman and Extended Kalman Filters: Concept, Derivation and Properties. Inst. Syst. Robot. Lisb. Port. 2004, 42, 46. [Google Scholar]
- Raja, M.; Sidhu, H.S.; Adhiyaman, N.; Teja, A.K. Integration of GPS/INS Navigation System with Application of Fuzzy Corrections. In Proceedings of the Conference on Advances in Communication and Control Systems 2013 (CAC2S 2013), Uttarakhand, India, 6–8 April 2013; Volume 2013, pp. 450–454. [Google Scholar]
- Ismaeel, S.A. Design of Kalman Filter of Augmenting GPS to INS Systems. Master’s Thesis, Computer Engineering Department College of Engineering Al-Nahrain University, Baghdad, Iraq, 2003; pp. 59–66. [Google Scholar]
- Babu, R.; Wang, J. Ultra-tight GPS/INS/PL integration: A system concept and performance analysis. GPS Solut. 2009, 13, 75–82. [Google Scholar] [CrossRef]
- Bhatti, U.I. Improved Integrity Algorithms for Integrated GPS/INS Systems in the Presence of Slowly Growing Errors Declaration of Contribution. Ph.D. Thesis, University of London, London, UK, 2007. [Google Scholar]
- Yan, Z.; Chen, X.; Tang, X. A novel linear model based on code approximation for GNSS/INS ultra-tight integration system. Sensor 2020, 20, 3192. [Google Scholar] [CrossRef] [PubMed]
- Hiba, A.; Szabo, A.; Zsedrovits, T.; Bauer, P.; Zarandy, A. Navigation data extraction from monocular camera images during final approach. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 340–345. [Google Scholar] [CrossRef]
- 3DR Iris+. Available online: https://www.adafruit.com/product/2199 (accessed on 27 May 2021).
- Copter Home—Copter documentation. Available online: https://ardupilot.org/copter/ (accessed on 27 May 2021).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GNSS | Standard Deviation | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| without KNN Predictor | with KNN Predictor | ||||||||
| X-Axis | Y-Axis | Z-Axis | X-Axis | Y-Axis | Z-Axis | X-Axis | Y-Axis | Z-Axis | |
| No blocking | 27.8269 | 117.5755 | 15.7477 | 27.6191 | 117.2243 | 15.8113 | 27.7402 | 117.4276 | 15.7710 |
| 1 s blocking | 27.8269 | 117.5755 | 15.7477 | 27.5380 | 117.1091 | 15.6933 | 27.7465 | 117.4192 | 15.7247 |
| 4 s blocking | 27.8269 | 117.5755 | 15.7477 | 27.4144 | 116.8594 | 15.3463 | 27.6745 | 117.1738 | 15.6184 |
| 8 s blocking | 27.8269 | 117.5755 | 15.7477 | 26.6793 | 115.8801 | 15.0102 | 27.4085 | 116.6536 | 15.5051 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aziez, S.A.; Al-Hemeary, N.; Reja, A.H.; Zsedrovits, T.; Cserey, G. Using KNN Algorithm Predictor for Data Synchronization of Ultra-Tight GNSS/INS Integration. Electronics 2021, 10, 1513. https://doi.org/10.3390/electronics10131513
Aziez SA, Al-Hemeary N, Reja AH, Zsedrovits T, Cserey G. Using KNN Algorithm Predictor for Data Synchronization of Ultra-Tight GNSS/INS Integration. Electronics. 2021; 10(13):1513. https://doi.org/10.3390/electronics10131513
Chicago/Turabian StyleAziez, Sameir A., Nawar Al-Hemeary, Ahmed Hameed Reja, Tamás Zsedrovits, and György Cserey. 2021. "Using KNN Algorithm Predictor for Data Synchronization of Ultra-Tight GNSS/INS Integration" Electronics 10, no. 13: 1513. https://doi.org/10.3390/electronics10131513
APA StyleAziez, S. A., Al-Hemeary, N., Reja, A. H., Zsedrovits, T., & Cserey, G. (2021). Using KNN Algorithm Predictor for Data Synchronization of Ultra-Tight GNSS/INS Integration. Electronics, 10(13), 1513. https://doi.org/10.3390/electronics10131513