1. Introduction
With the advent of power electronic converters, the power conversion for various applications has become quite easy. However, the power quality issues due to the nonlinear switching of power devices have become inevitable. Among all the power quality issues, the most prevalent one is the harmonics. Total harmonic distortion (THD) results in poor power factor, insulation failures, non-sinusoidal source, poor voltage profile, etc. The harmonic distortion in source voltage is very high when the power electronic interfaces relate to induction heating circuits, arc furnace, un-interruptible power supplies (UPS) [
1,
2]. To alleviate the impact of harmonics, filter circuits are used. In general, the inductor (
L) and capacitor (
C) form L-C passive filters which do not possess any static control [
3]. Active power filters (APFs) [
4] are embedded with control switches whose duty cycle is tuned to the amount of inclusion of LC values. The APF topology that is prevalently used in grid systems to compensate for the harmonic distortion have an energy storage component with an inverter. Many research works have been archived in proposing new topologies for the inverter or new control scheme of the inverter for compensating the harmonic distortion.
The inverter topology presently used are six-switch topologies in which the switches will be of MOSFETs or insulted gate bipolar transistor (IGBT). Kim [
5] proposed a new hybrid active power filter topology in which the combination of MOSFETs and IGBTs were used. The hybrid switch usage helped in dealing with various combinations of high- and low-voltage, switching frequencies. The IGBT embedded inverter accounts for voltage compensation whereas the MOSFET was for current compensation. The above-discussed scheme, though advantageous, encounters more switching losses. Another breakthrough happened when Hirve et al. [
6] and Barva et al. [
7] proposed a three-phase, four-wire system, but there was additional control complexity in the system. Similarly, articles were published based on the reference signals generated for the control of shunt active power filter (SAPF) in either frequency domain or time domain algorithms [
8,
9]. In [
10,
11], synchronous reference frame theory and instantaneous PQ theory were used to generate the reference currents. Therefore, the THD was reduced to within the permissible limit, but the voltage across the DC link capacitor varied with respect to the transient conditions.
With the advent of multilevel inverter (MLI) topologies, the harmonic mitigation and pure sinusoidal waveform at inverter terminal output became pragmatic [
12,
13]. MLIs like cascaded H-bridge, diode clamped inverter, flying capacitor inverter and its control methods, applications, etc., were proposed [
14,
15]. Recently, a detailed review of modular multilevel converters and its control nuances were presented in [
16]. A five-level cascaded H-bridge (CHB) was implemented using a space vector pulse width modulation technique [
17], which was a complex scheme of producing PWM signals. In active power filters, instead of the conventional inverters, MLIs can be used but the PWM generation with greater driver units makes the compensation scheme very complex [
18].
In recent years, single-stage inverters have gained more importance due to their reduced circuit complexity, less weight and smaller number of components. Peng introduced the Z-source inverter (ZSI), which comprised two sets of two passive elements, i.e., an inductor, a capacitor, and a diode connected to act as a buck/boost inverter [
19]. All these topologies will have L-C impedance networks which facilitates the buck boost capability [
20,
21,
22] and is combined with the inversion unit. The major drawbacks of these topologies are poor DC regulation and high complexity in designing the L-C network. Furthermore, achieving the shoot through mode to boost the voltage in single stage inverter is quite complex.
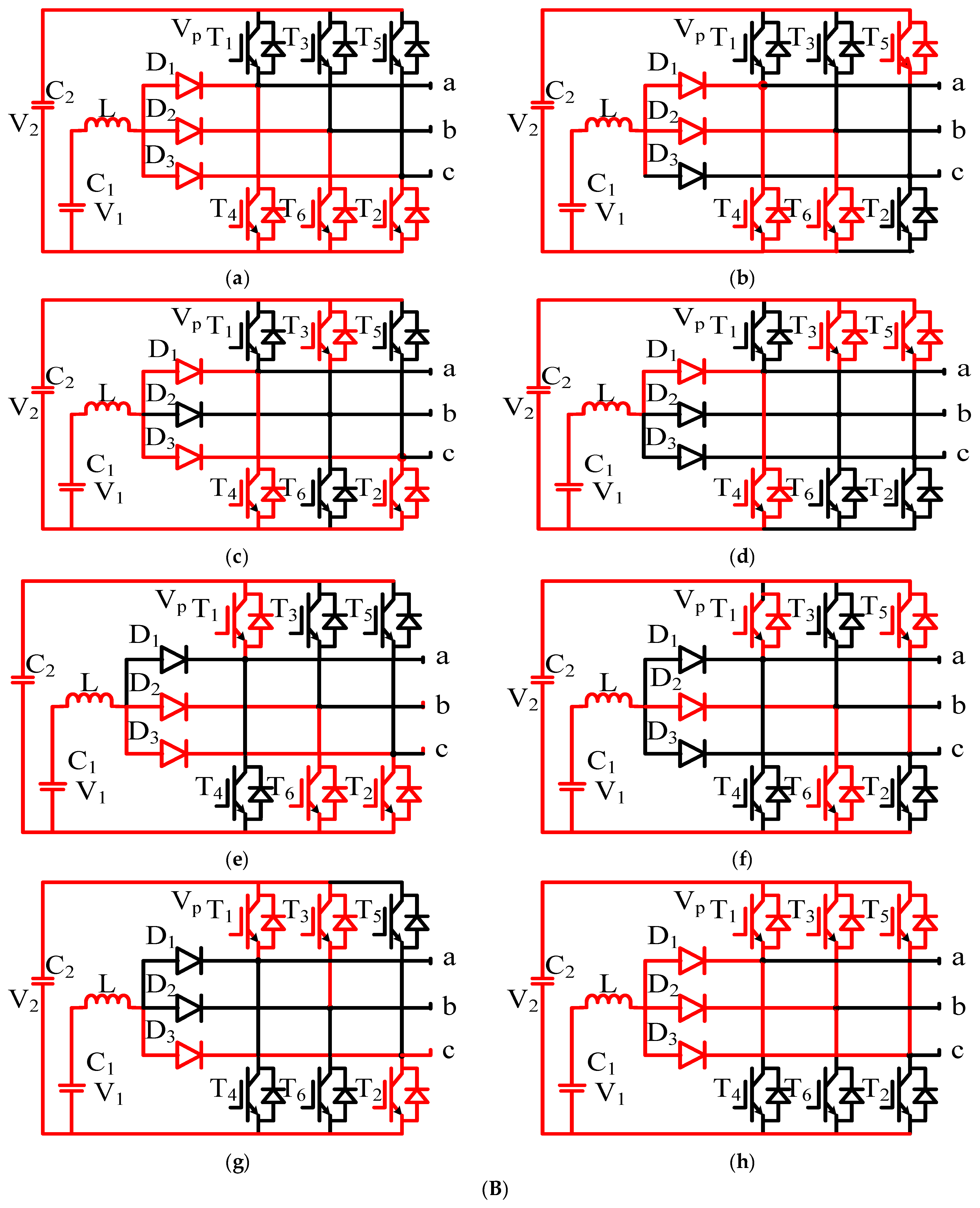
A split source inverter (SSI) is of unique topology, which uses only an inductor and a capacitor, and diode as the prime components [
23]. Additionally, it does not utilize any extra switching state and the voltage across the bridge remains stable. The SSI topology utilizes the same states as voltage source inverter (VSI) with the same modulation schemes. This topology is a combination of boost converter merged with 3-φ VSI connected with the input inductor through diodes to the split points of the bridge inverter. With these advantages in mind, in this research work SSI topology has been chosen to compensate the harmonic currents in the line.
Various controller schemes for active power filters have been reported in the research arena. In a typical control scheme, the grade of harmonic impact is measured and PWM (pulse width modulation) pulses for the inverter are generated in such a way that the inverter feeds harmonic currents into the line to negate the existing harmonic currents. The control algorithm aids in maintaining the desired point of common coupling (PCC) voltage, harmonic current elimination, and load balancing of the nonlinear loads. On the other hand, achieving voltage regulation at the PCC and unity power factor control cannot be achieved simultaneously. In all, the SAPF compensation scheme involves four essential facets and they are harmonic reference current generation, synchronization, DC link voltage regulation and current control. A detailed survey on SAPF has been archived in the literature [
24]. Conventional proportional integral (PI) controllers for the voltage and current control were used in [
25,
26] to regulate the harmonic current and the DC voltage. However, to achieve versatility in the PI controller, an accurate model of the system should be known, which is difficult to obtain with the given nonlinearity, load disturbances and parameter variations. The fuzzy logic controller (FLC) is one of the intelligent control methods and even without a precise linear mathematical model, it can perform well.
The FLC-based shunt APF was reported in [
27], where the reference current generation was carried out using P-Q theory and the FLC was used for current injection and DC voltage regulation. Here, the complexity lies in framing the rules with the membership functions. In [
28], dynamic characteristics of VSI based SAPF for varying loads were discussed. In [
29], synchronous reference theory was used to develop reference current generation for seven level cascaded H-bridge inverter (SLCHB), seven level modular multilevel converter (SLMMC)-based SAPF was employed to reduce the harmonics to 4%. A hybrid predictive fuzzy logic (HPFL)-based technique was used to reduce harmonics where the predictive part was used for compensating current generation and fuzzy logic for voltage regulation [
30]. Another study designed a low-cost hybrid shunt active power filter using PI/fuzzy for generating reference current and to regulate DC link capacitor voltage and switching pulses were generated by using an adaptive fuzzy hysteresis current controller (A-F-HCC) [
31]. In [
32], maximum power point tracking (MPPT) and DC link voltage regulation were carried out using a fuzzy logic controller. All these systems mentioned above used time domain control algorithms to generate current references. A comparison of the controllers for VSI based SAPF has been discussed with respect to the reduction of harmonics in [
33]. A sliding mode controller (SMC) for shunt APF for improving power factor was discussed in [
34], whereas a THD of 1.45% was produced by the designed system with complex reference current generation method. The maximum development of a shunt APF for improving power quality with predator-prey based firefly optimization was well presented in [
35]. However, in this work, the authors developed an optimization technique for a normal voltage source inverter (VSI)-based APF and complex controller computation methods. Single- and three-phase PUC-5 inverter systems were reported in [
36] where the converter had two equally regulated separate DC links for the APF application.
From the detailed literature, it is inferred that the quest on proposing simple but versatile control schemes for SAPF is still in demand. Additionally, the choice of inverter topology should achieve the required compensation. This research paper proposes an inventive FLC-aided SSI for SAPF. The fuzzy controller in the outer loop provides good DC regulation and reduced harmonics. SSI is advantageous with reduced components, DC link capacitor voltage and high voltage gain with conventional switching states and shorter commutation path. The paper is so organized that
Section 2 deals with analysis of SSI and modelling of the SSI. The design of controllers for SSI-based SAPF has been explored in
Section 3.
Section 4 presents the results obtained from dynamic and steady state conditions of nonlinear loads. Finally, the conclusions are presented in
Section 5.
3. SSI Based SAPF with Controllers
The three phase SSI-based SAPF with controllers are illustrated in
Figure 3. From this figure, it is observed that the two DC link voltages of capacitors
C1 and
C2 are summed to attain the measured DC link voltage
V2. This
Vdc is compared with DC link reference voltage
Vdc* to obtain the voltage error, which is applied to single FLC/PI controller to produce the control signal. This generated control signal and synchronization of supply sin θ from the phase-locked loop (PLL) are multiplied to obtain the reference current of the APF
is*. Now, the measured current
is from the supply is compared with the
is* to generate the reference voltage signal. This reference voltage is compared with multiple carrier signals with integrated voltage balancing to generate the PWM pulse for gating switches of an inverter. The inverter must inject the current at PCC to compensate the current (current controller), reduce the THD, improve the power factor and balance the capacitors voltage (FLC/PI controller) during the SAPF operated at non-linear load condition. Now, the current equation of the given model is defined by Equation (17):
where
is the current through the filter at the point of common coupling.
3.1. Design of PI Controller
The proportional-integral (PI) is a traditional controller that is used to retain sinusoidal output current, to maintain near-unity and fast implementation of the power factor. The proportional and integral gains are Kp and Ki, respectively. The difference between reference voltage and output voltage is the error signal. The values of Kp and Ki are 0.9 and 500 respectively are set by tuning of the controller using the Ziegler–Nicholas method.
3.2. Design of FLC
The fuzzy logic controller is one of the non-linear and intelligent controllers. The rules of the FLC are derived from the system parameters without the mathematical model of the system. The FLC converts a linguistic control strategy based on expert knowledge into an automatic control strategy, which makes the system stable. The FLC consists of three parts namely, fuzzification, inference system, defuzzification. The fuzzy variables are expressed in terms of membership functions. The Sugeno method of fuzzification was used where the output was numerical values. The membership functions of error and change in error of the proposed model are depicted in
Figure 4a,b, respectively.
In this proposed system, Gaussian membership functions were selected as the inputs. The voltage errors of the capacitor within the inverter were given as the input to FLC. Then, FLC output was multiplied to synchronize the supply voltage signal sinθ via the phase-locked loop (PLL) and the reference current of APF. Then,
is was compared with
is* to make the reference voltage signal (refer
Figure 3). This reference voltage was compared with the carrier signals, which are integrated with voltage balancing to generate the PWM pulse for gating the switches of SSI. The current from the SSI is injected at PCC to compensate the current.
The fuzzy sets were NB (negative big), NS (negative small), Z (zero), PS (positive small), PM (positive medium) and PB (positive big), respectively. The assortment of FLC 49 rules were to be wholly contingent on dynamic deeds of the proposed APF (see
Table 1). Finally, the defuzzification-weighted average method was involved.
3.3. Hysteresis Current Controller (HCC)
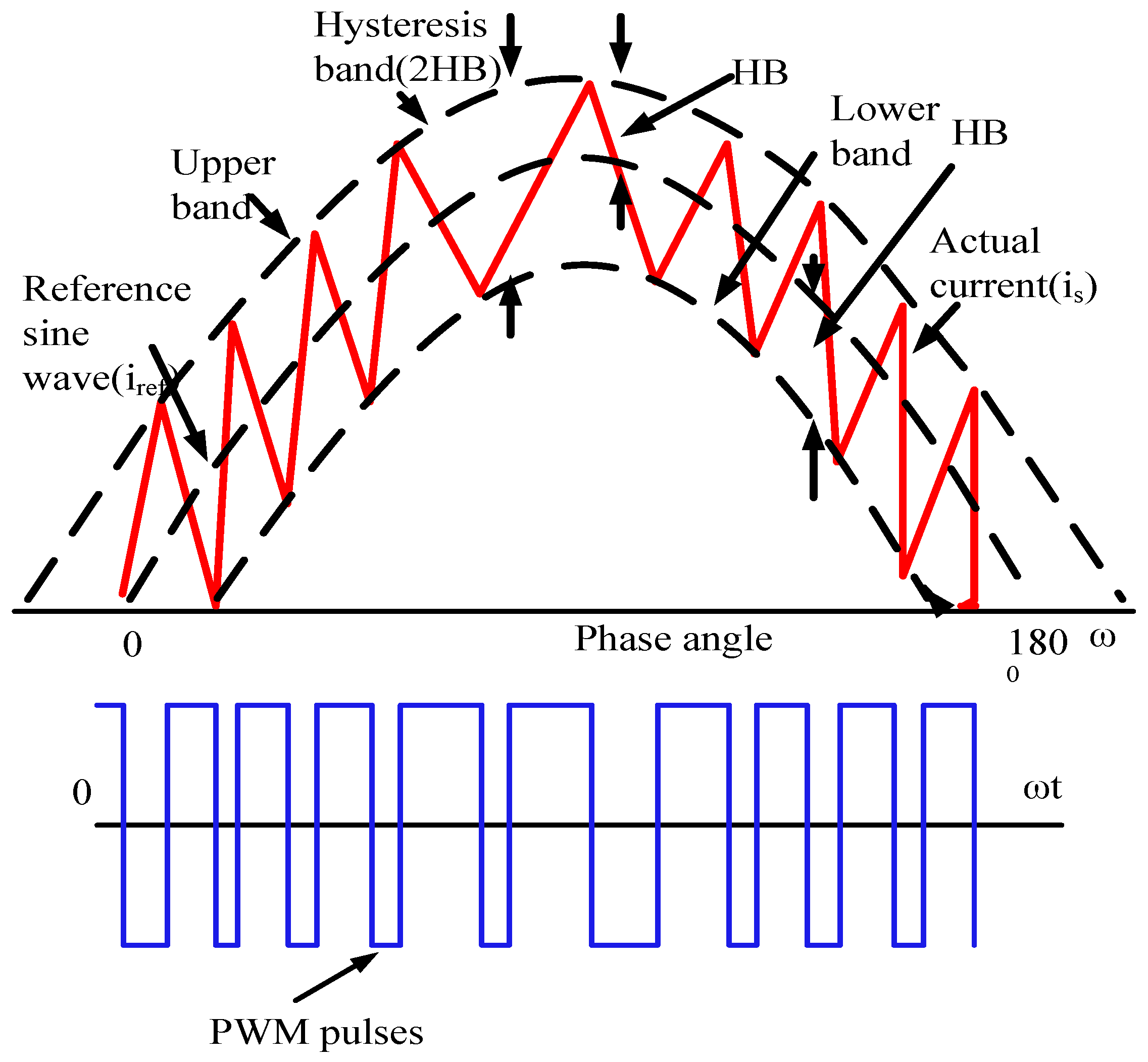
This method is simpler, and the implementation does not require complex circuits or processors. The graphical representation of HCC for designed filter is illustrated in
Figure 5. The HCC method appears in such a way as to compel the current to remain within a hysteresis band (HB) when the switch is ON/OFF. When the error reaches a fixed HB magnitude, the switches will operate within the backslash limits. The control laws with respect to the power switches of the SSI of the APF are as follows.
HBmin ≤ iref − is ≤ HBmax, none of the power switches are closed.
Iaref − Isa, Ibref − Isb, Icref − Isc>HBmax, T1, T3 and T5 are closed.
iref − is <HBmin, T4, T6 and T2 are closed. Isa, Isb, Isc are source currents.
The optimal operating frequency (ω) with desired HB can be written as
where
V1 is the source voltage and
V2 is the DC link capacitor voltage, HB is the hysteresis band and
Lf is the inverter side inductance.
4. Results and Discussion
This section deals with the simulation results of the proposed three-phase SSI-based SAPF with various controllers at different load operating conditions. In this proposed system, diode bridge rectifier (DBR) with RL and RC were utilized as the nonlinear loads. The experiments were performed under source and load balanced conditions as shown in
Figure 6. To validate the robustness and dynamic responses of the proposed SSI-based SAPF, a step change load was introduced with the non-linear loads. During hysteresis current controlling, a sudden load variation was applied at a time period of 0.05 s where the total simulation time was 0.1 s. For SPWM technique, a sudden load variation was introduced at 0.5 s while the total simulation time was set at 1.0 s.
The specifications of SSI-based SAPF is catalogued in
Table 2. Here, HCC was employed as an inner loop for the source current profile and reduce the THD of it, whereas the PI controller and FLC were used as the outer loop for regulating its DC link voltages.
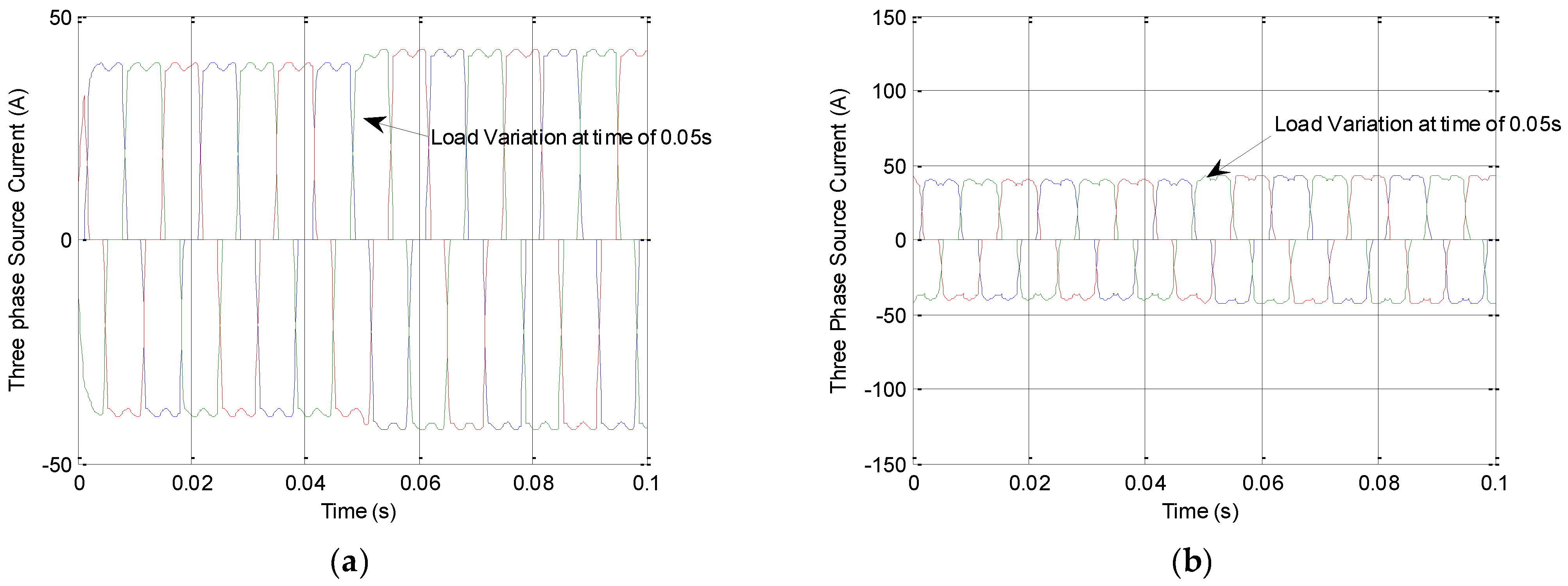
Figure 7 indicates the simulated responses of the source current and THD of the power system without SAPF at different load conditions.
From these results, it was evident that the THDs of the power system without filter at RL load and RC Load were 23.05% and 23.45%, respectively, that were much higher than IEEE standard limit of 5%. To reduce the THD and refine the source current, a SAPF using three phase split source inverter was introduced in the proposed power system design.
4.1. Hysteresis Current Controller (HCC) with Different Controllers for Voltage Regulation
4.1.1. Case 1 for HCC: PI and FLC Controllers with RL Loads
Figure 8a–c shows the change in source current, load current and compensation current, for RL load when SAPF was connected. It was found that the proposed model when subjected to dynamic load changes, the DC link voltage profile having a peak overshoot with a voltage of 387 V before it settled at a time of 0.15 s and reached to a voltage of 347 V with zero steady state error as shown in
Figure 8e. At 0.05 s, the load was increased by 5 Ω, and it was observed that the controller had null overshoots, zero steady state error, and zero settling time. Hence,
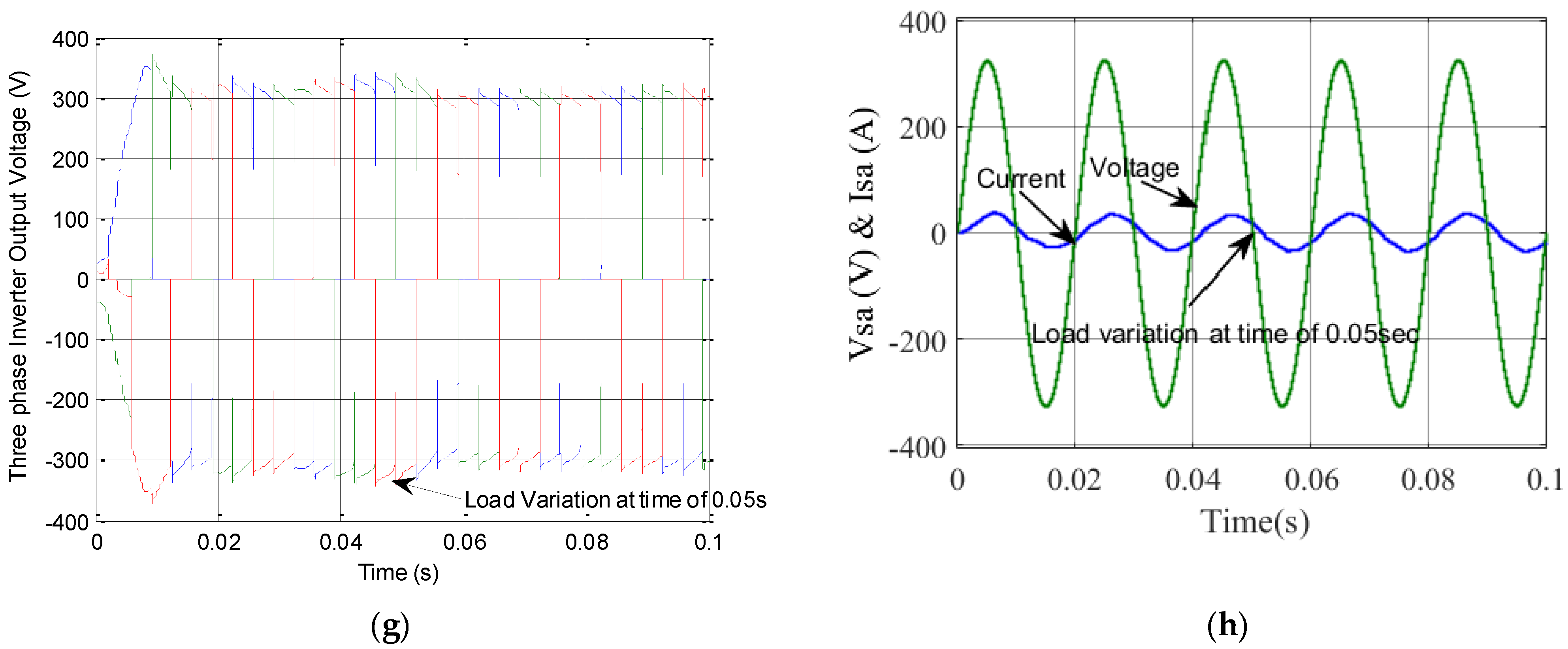
Figure 8g shows the three-phase line voltage of three-phase split source inverter.
Figure 8h shows the source current profile in phase with source voltage. The source current reached almost near to its current profile with a harmonic percentage of 4.47% which is shown in
Figure 8d.
Figure 9a–c shows the change in source current, load current and compensation current for the RL load when the SAPF was connected. When the proposed system was subjected to load changes of the diode rectifier bridge, the DC link voltage profile had a peak overshoot with a voltage of 387 V before it settled at a time of 0.13 s and reached a voltage of 327 V with zero steady state error as shown in
Figure 9e. At 0.05 s, the load was increased by 5 Ω and it was observed that the controller had null overshoots, zero steady state error, and zero settling time.
Figure 9g shows the three-phase line voltage of the three-phase split source inverter with 315 V.
Figure 9h shows the source current profile in phase with the source voltage. The source current reached almost near to its current profile with a harmonic percentage of 4.46%, which is shown in
Figure 9d.
From these results, it was evident that the proposed model with HCC and FLC displayed proficient performance at DBR based RL loads. Furthermore, DC link voltages were settled at a quick settling time/zero steady state error and null peak overshoots with a voltage of 327 V. The source current reached almost near to its current profile with HCC and FLC with less distortion in its waveform and source current harmonics were reduced to 4.46%.
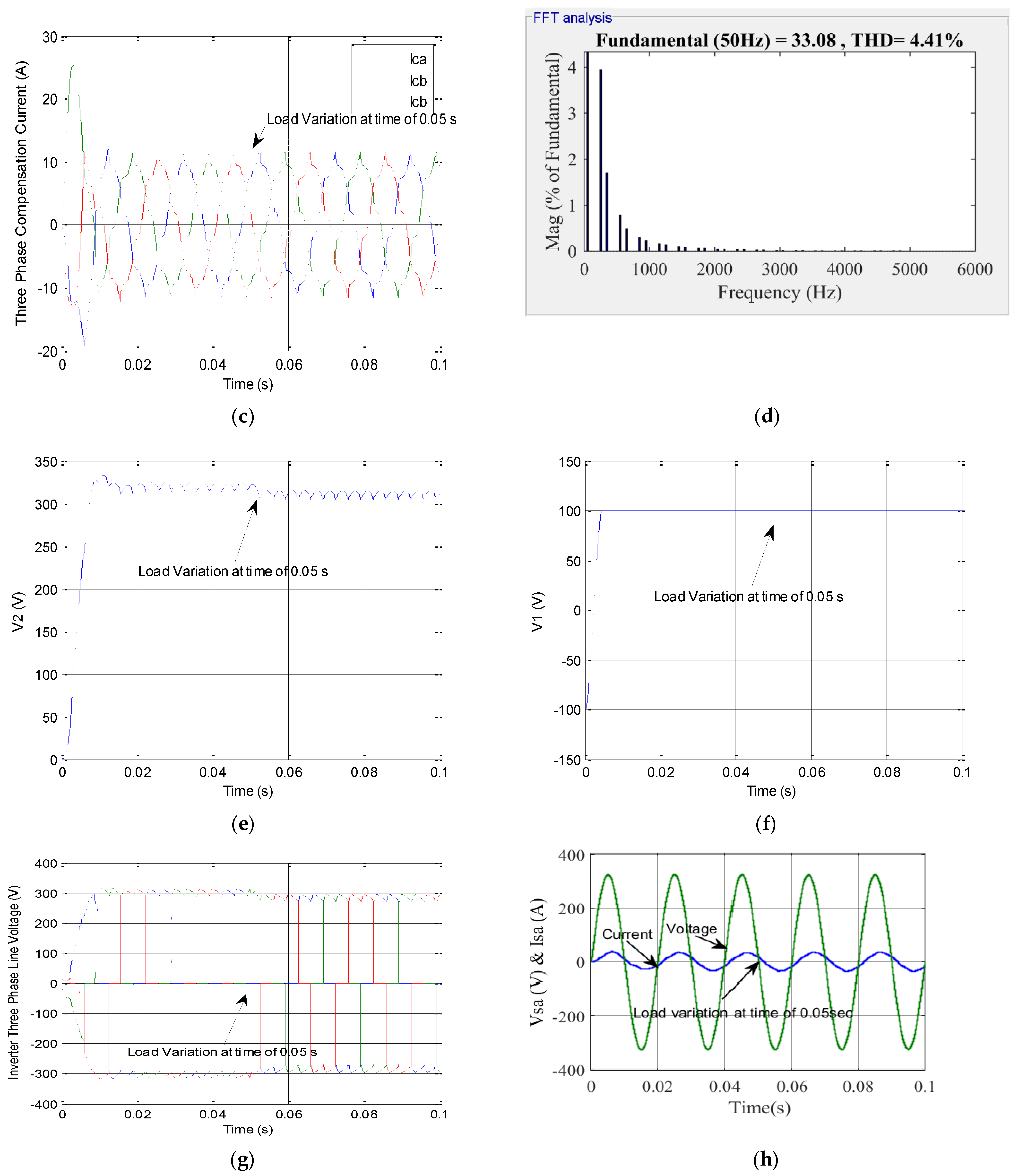
4.1.2. Case 2 for HCC: PI and FLC Controllers with RC Loads
The simulation results illustrated in
Figure 10a–c include the source current, load current and compensation current for the RC loads when SAPF was connected. The PI control scheme involves regulation of the DC link voltage. The DC link voltage showed a small peak overshoot before it reached the steady state voltage of 337 V, as shown in
Figure 10e. The DC link voltage had zero steady state error, null overshoots and zero settling time during the step change in load variation with a minimized ripple voltage. In this case, the SAPF has been introduced to compensate harmonics and has reduced the THD from 23.45% to 4.41%. The source current near to the current profile indicated a reduction in harmonics to 4.41% as shown in
Figure 10d.
Figure 10g shows the output line voltage of the three-phase split source inverter.
Figure 10h shows that supply voltage and source current were almost in phase with the power factor.
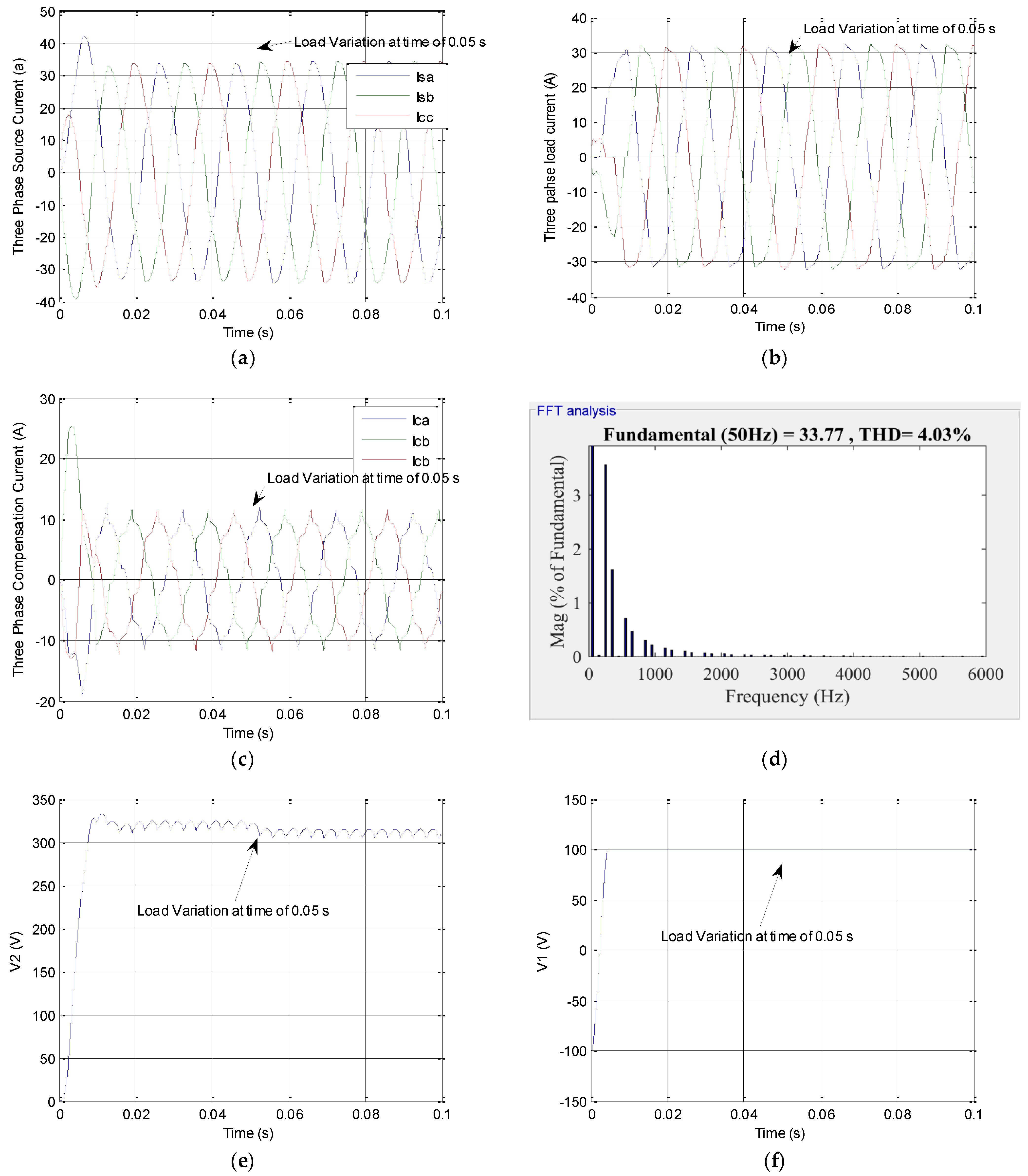
Figure 11a–c show the source current, load current, compensation current. It was observed that when there was a sudden change in load at 0.05 s, it had zero steady state error at 327 V with a minimized ripple voltage which is shown in
Figure 11e. The source current near to the current profile indicated a reduction in harmonics by 4.03%, as shown in
Figure 11d.
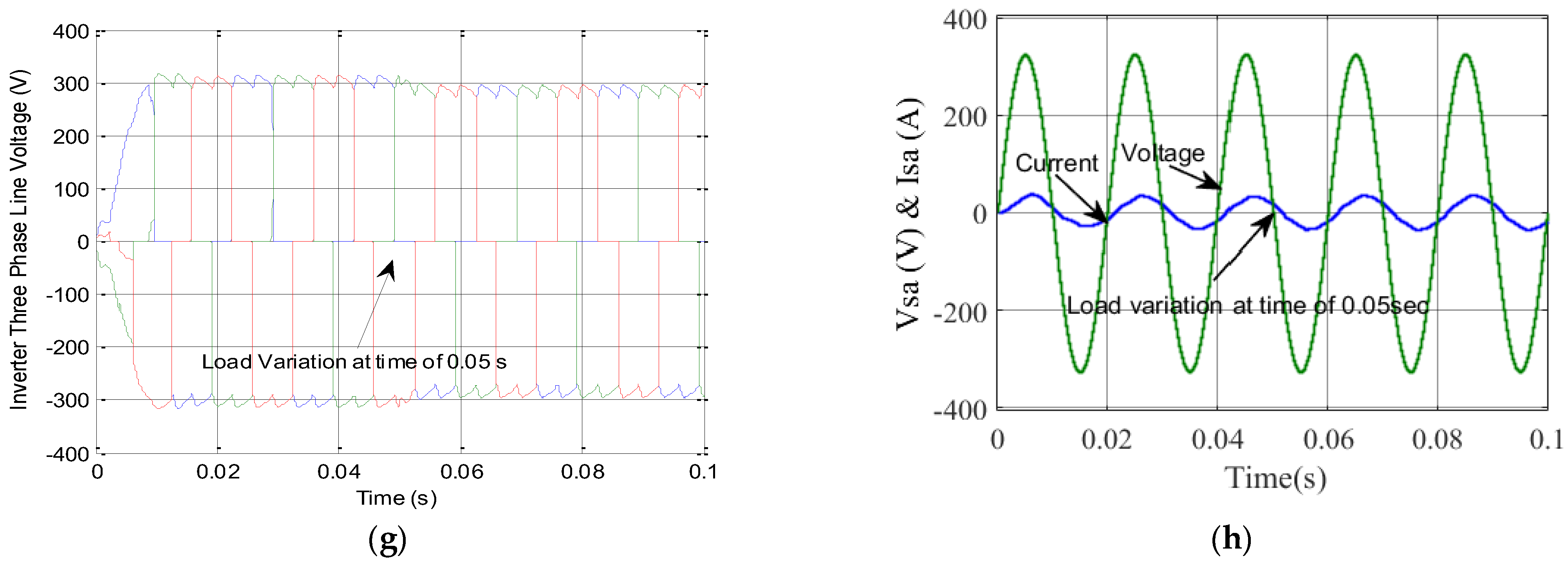
Figure 11g shows the output line voltage of the three-phase split source inverter.
Figure 11h shows that supply voltage and source current were almost in phase. When the FLC controller was connected in the outer loop it performed well because the overall system was a nonlinear system. The DC link voltage remained constant. The source current harmonics were found to be 4.46% and 4.03% for various loads using the FLC over PI controller with a near to source current profile. Thus, the results proved the system dynamic performance during transient condition.
4.2. SPWM with Different Controllers for DC Link Voltage Regulation
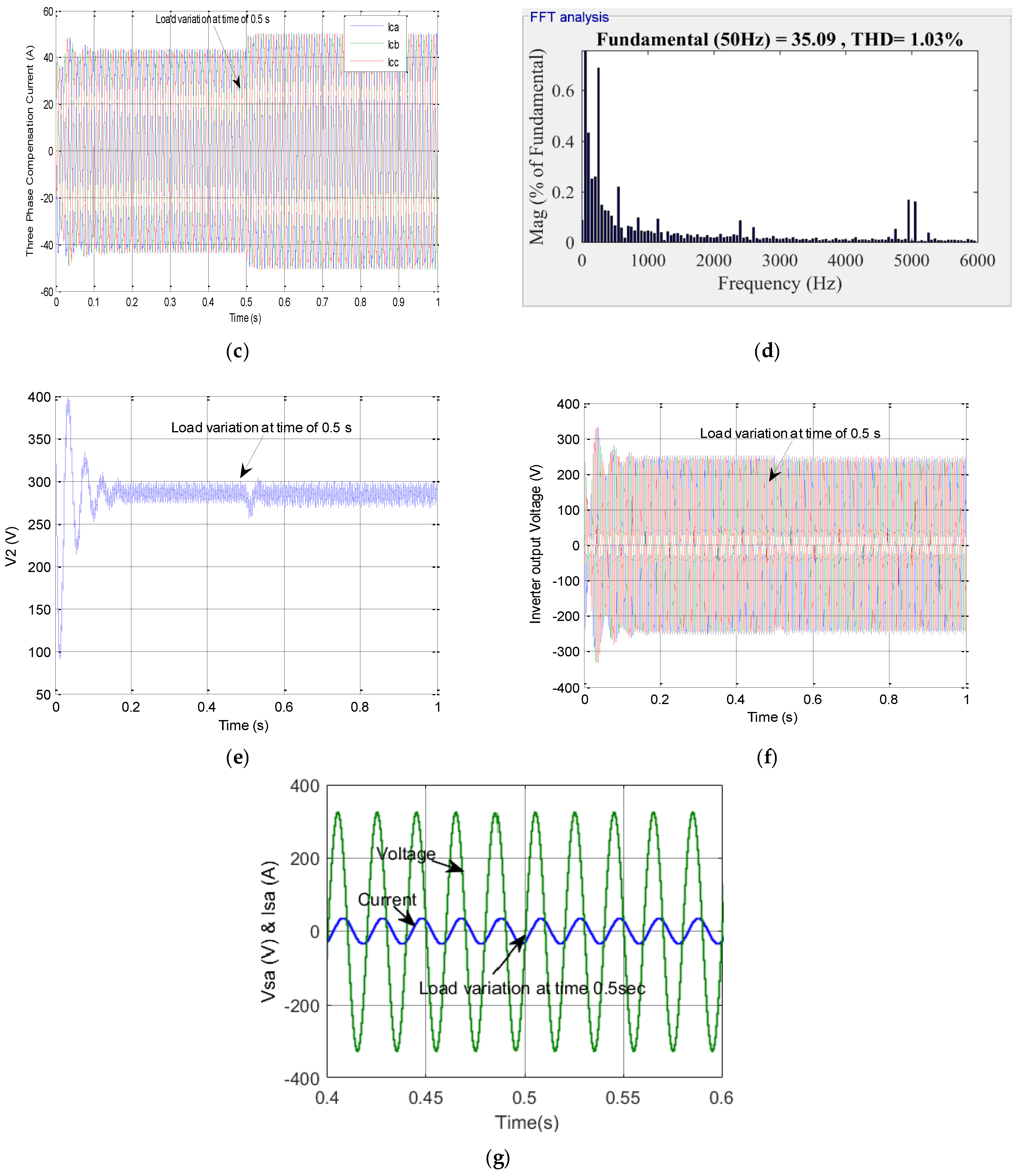
4.2.1. Case 1 for SPWM: PI and FLC Controllers with RL Loads
It was observed that when the controllers for DC link voltage regulation was varied, the total harmonic distortion has been reduced to IEEE standard limit of 5%. When the proposed model treated with a different controller in the inner loop, percentage of THD reduction has been verified.
Figure 12a–c shows the change in source current, load current and compensation current. It was further observed that the proposed model when subjected to dynamic load changes, the DC link voltage profile showed a peak overshoot with a voltage of 387 V before it settled at a time of 0.2 s and reached a voltage of 300 V with zero steady state error, as shown in
Figure 12e. At 0.5 s, the load was increased by 5 Ω and it was observed that the controller had null overshoots and zero steady state error.
Figure 12f shows the three-phase line voltage of three phase split source inverter.
Figure 12g shows the source current profile in phase with the source voltage. The source current reached almost near to its current profile with a THD of 1.03% as shown in
Figure 12d.
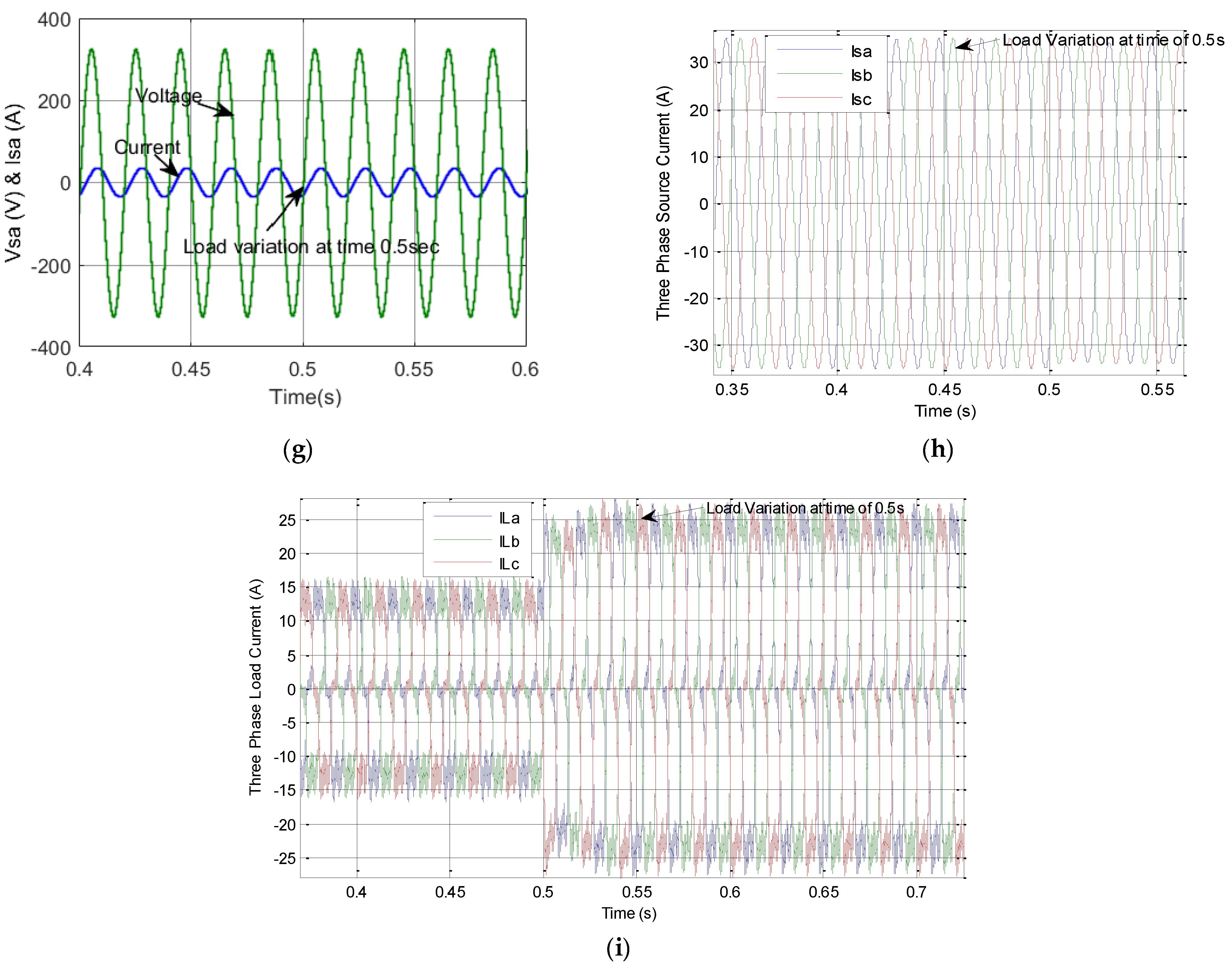
Figure 13a–c shows the source current, load current, and compensation current when SAPF relates to SPWM and FLC Controller.
Figure 13e shows the DC link voltage profile showing a peak overshoot of 447 V and it reached a voltage of 350 V with zero steady state error. When there is a sudden change in load, the FLC controller had null overshoots and zero steady state error.
Figure 13f shows the line-to-line voltage of three phase split source inverter.
Figure 13g shows the source current profile in phase with the source voltage. The source current reached almost near to its current profile with a harmonic percentage of 0.76% as shown in
Figure 13d.
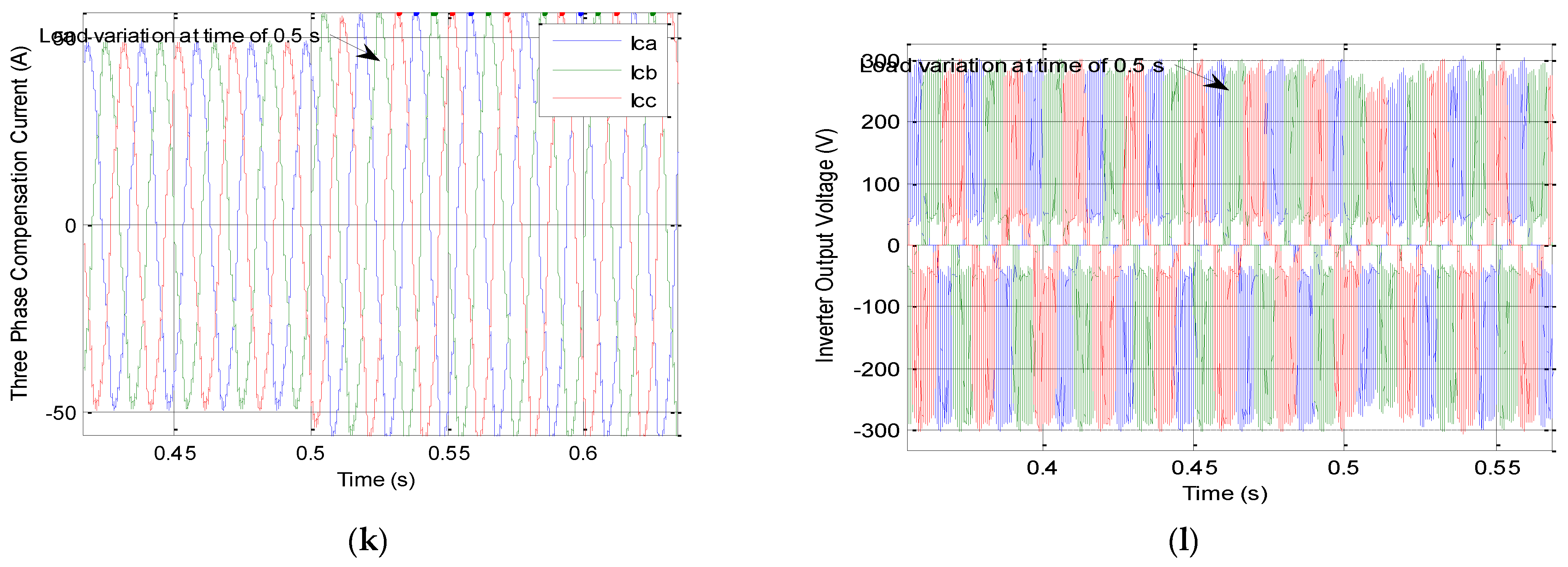
Figure 13j shows that the input inductor current has been increased and a small voltage dip during a transient period of 0.5 s.
Figure 13k,l,h show the zoomed graphs of source current, load current and compensation current of load variation at the time of 0.5 s. When the FLC controller was connected to the outer loop and SPWM controller to the inner loop, controller where the DC link voltage remained constant, the source current harmonics was found to be 0.76% for FLC over PI controller with near to the source current profile and power factor near to the unity. Thus, these results proved the system dynamic performance during transient condition.
4.2.2. Case 2 for SPWM: PI and FLC Controllers with RC Loads
The difference in the DC link voltage regulation with PI and FLC controllers with SPWM are presented
Figure 14 and
Figure 15.
Figure 14a–c shows the source current, load current and compensation current when SSI is connected as SAPF. The DC link voltage showed a peak overshoot before it reached the steady state voltage of 347 V as shown in
Figure 14e. At 0.5 s, when there was a sudden change in load, the DC link voltage had zero steady state error, null overshoots and zero settling time with a minimized ripple voltage. The source current was near to the current profile with a reduction of harmonics by 1.00% as shown in
Figure 14d.
Figure 14f shows the output line voltage of split source inverter.
Figure 14g shows that supply voltage of 315 V and source current are almost in phase with the power factor near to unity.
Figure 15a–c shows the change in source current, load current and compensation current. The DC link voltage profile showed a peak overshoot with a voltage of 410 V before it settled at a time of 0.14 s and reached to a voltage of 347 V at 0.5 s with zero steady state error, as shown in
Figure 15e. It was observed that the fuzzy logic controller had null overshoots, zero steady state error and a small voltage dip during a transient period of 0.5 s.
Figure 15f shows the three-phase line voltage of three phase split source inverter.
Figure 15g shows the source current profile in phase with the source voltage. The source current reached almost near to its current profile with a harmonic of 0.72% as shown in
Figure 15d. hence,
Figure 15h,i are zoomed waveforms of the source current and load current at 0.5 s. The FLC controller was connected to the outer loop and SPWM controller to the inner loop, controller where the DC link voltage remained constant. The source current harmonics was found to be 0.72% for FLC over PI controller with near to the source current profile and a power factor near to the unity. Thus, these results proved the system dynamic performance during transient condition.
4.3. Comparative Analysis and Discussion
In order to analyse the performance of the proposed approach, statistical analysis of the case studies with a shunt active power filter configuration using various approaches is illustrated in
Table 3. From the results, it was evident that the proposed model with SAPF demonstrated proficient performance at DBR based RC and RL loads where DC link voltages were settled in quick time with almost zero steady state error and minimized ripple voltage for FLC controller compared to the PI controller with a sudden load variation at 0.5 s. Owing to the nonlinearity in the total system, fuzzy logic controller performed well compared to the PI controller for RL and RC loads. Furthermore, the inner current controllers in HCC and SPWM were replaced with outer loop controllers. The source current harmonics had almost the source current profile and the power factor was near unity with lower distortion factor.
The load values were changed dynamically, and the automatic regulation was investigated for the developed controller. From the results obtained based on the simulations of different case studies under different load conditions, it can be concluded that the proposed system is robust enough to accommodate any sudden load variations. Therefore, the system could bring a sustainable and simple solution for automatic regulation of load nonlinearity.
From
Table 3, it was found that the designed SAPF through SPWM and fuzzy logic control aided SSI showed better performance with significantly reduced THD down to 0.76% for the RL load and 0.72% for RC load. When compared the HCC and PI controller with the SPWM and FLC, the later one demonstrated almost six times lower THD, which would significantly contribute towards improving the power quality.
From
Table 4, it can be concluded that topologies implemented requires a greater number of switches [
29], and PWM techniques which are used to generate gate pulses are complicated. The DC link capacitors rating required was high in all other topologies. In [
35,
36], the reference current generation led to the complexity of the structure. It can be observed that indirect effective controlled SSI-based SAPF showed less THD, less distortion and good DC voltage regulation under transient conditions.
In this work, the simulations were focused on reduction of THD and overall system losses due to the harmonics created by nonlinear loads which are used in domestic as well as industrial applications. A substantial increase in the harmonics might lead to energy losses, the life span of the electrical equipment might decrease and derating of the electrical equipment. To avoid these drawbacks, a three phase SSI-based SAPF for current harmonic compensation has been proposed. When identifiable harmonics are present, the best solution is to suppress the harmonics at the source side. The dynamic performance of the SSI-based SAPF was designed with an indirect effective control to suppress the harmonics from the source side by injecting the harmonic current at PCC. The fuzzy-based strategies regulating the DC link capacitor voltage made it simple, robust and less susceptible to system transients.



 ,
, 



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 Error in Voltage (e)
Error in Voltage (e) Change in Error Voltage (ce)
Change in Error Voltage (ce)