
A Tightly-Coupled Positioning System of Online Calibrated RGB-D Camera and Wheel Odometry Based on SE(2) Plane Constraints

 and
and
Abstract
:1. Introduction
- A complete set of RGB-D and odometry fusion positioning technology scheme based on optimization algorithm with SE(2) planar constraints is proposed, which has better accuracy performance comparing with the fusion algorithm based on filter algorithm or the classic RGB-D SLAM frame.
- Online calibration based on RGB-D depth information is supported, whose performance is better than the classic online calibration method. There is no need to calibrate the extrinsic parameters in advance offline, and the algorithm can be run directly in the case of unknown external parameters. Moreover, thanks to the depth information of RGB-D camera, no additional calibration scale information is needed.
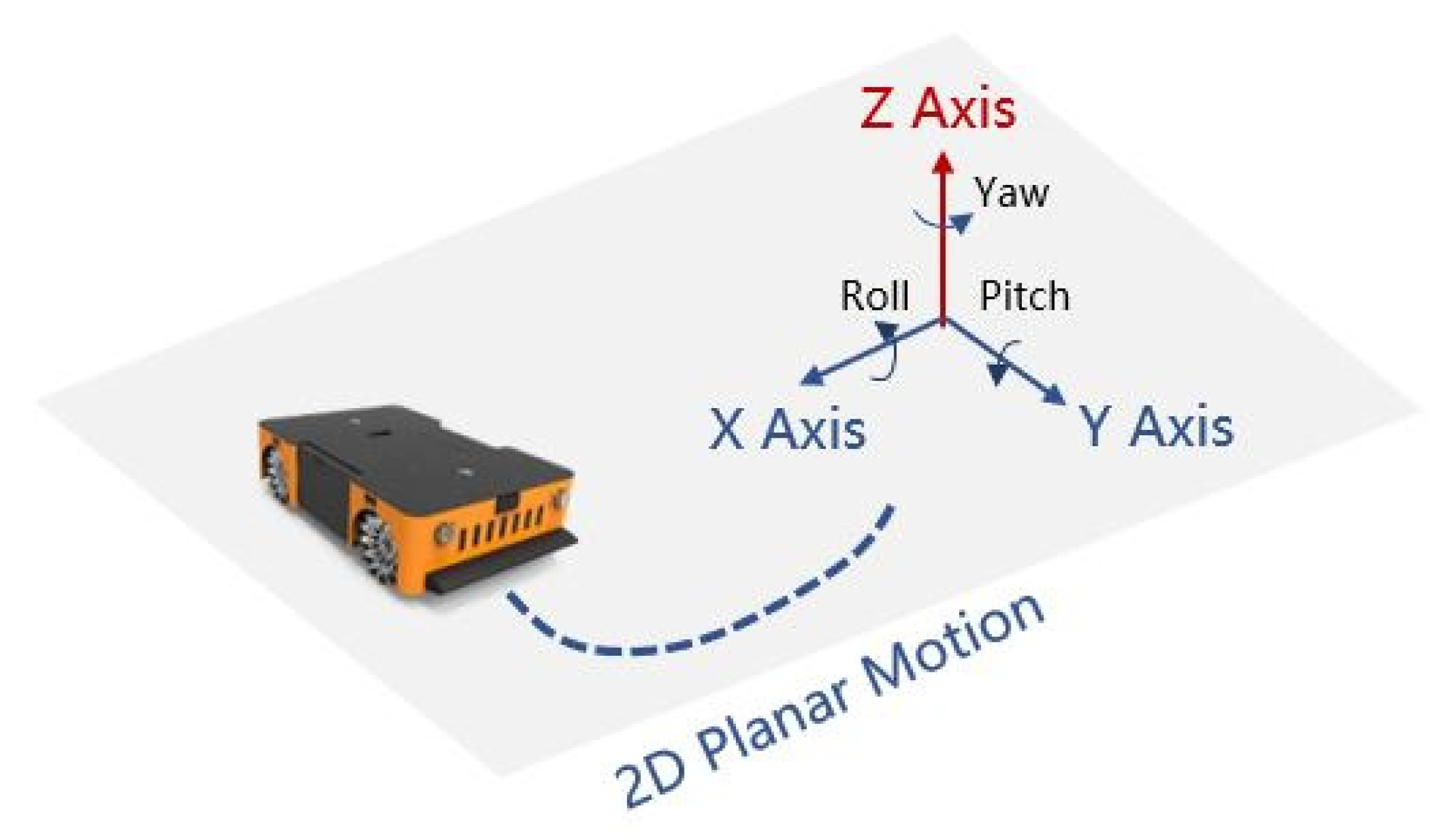
2. Preparation
3. Fusion Algorithm
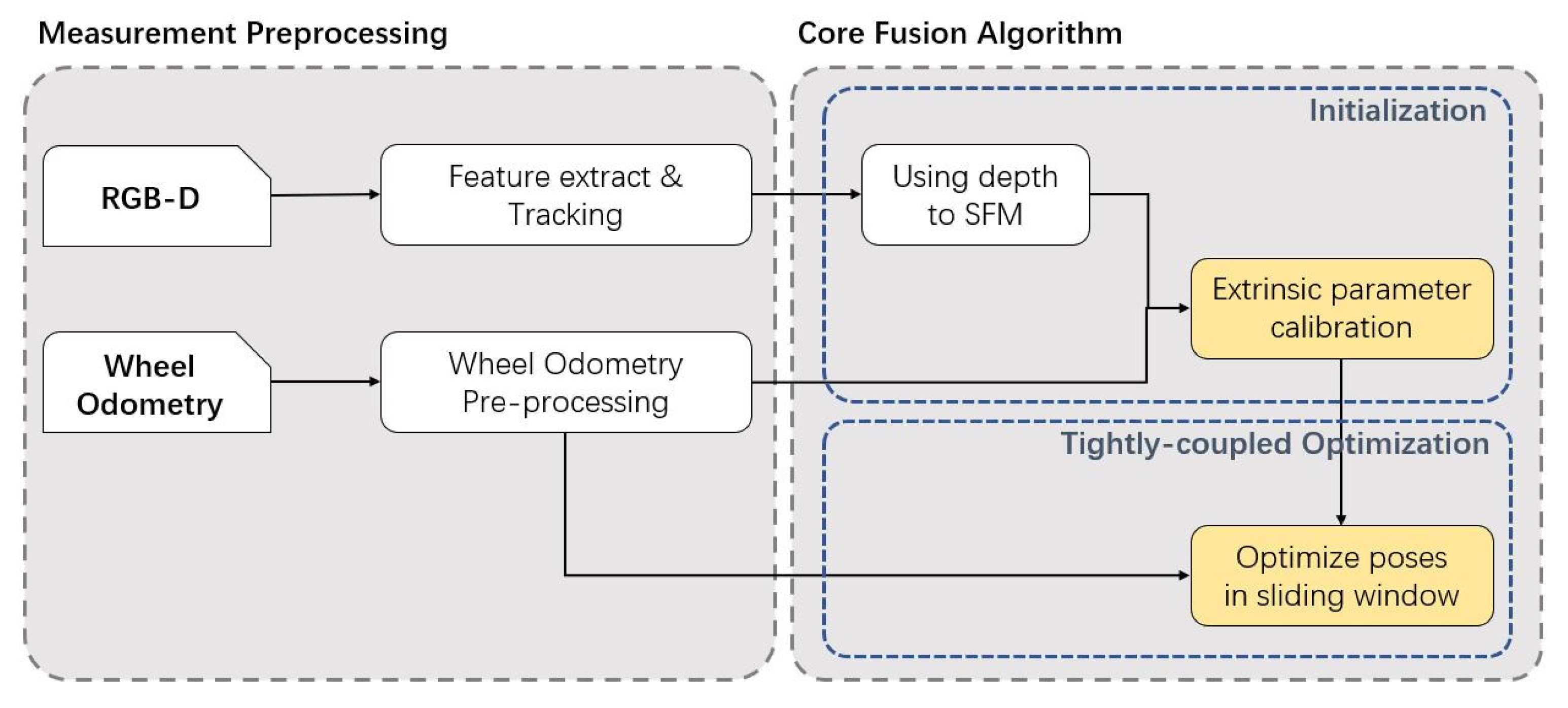
3.1. Overview of Algorithm Framework
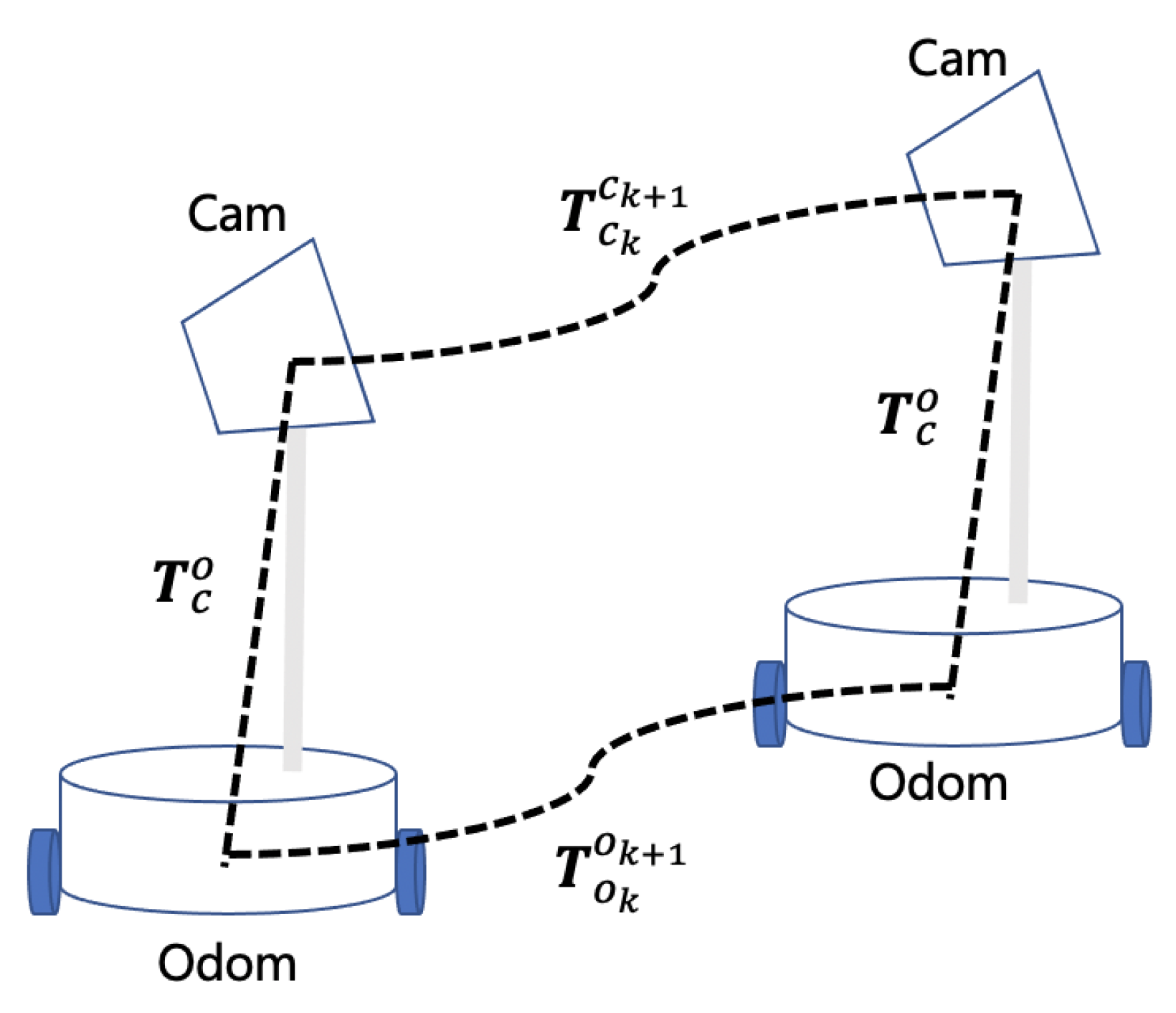
3.2. Initialization Algorithm
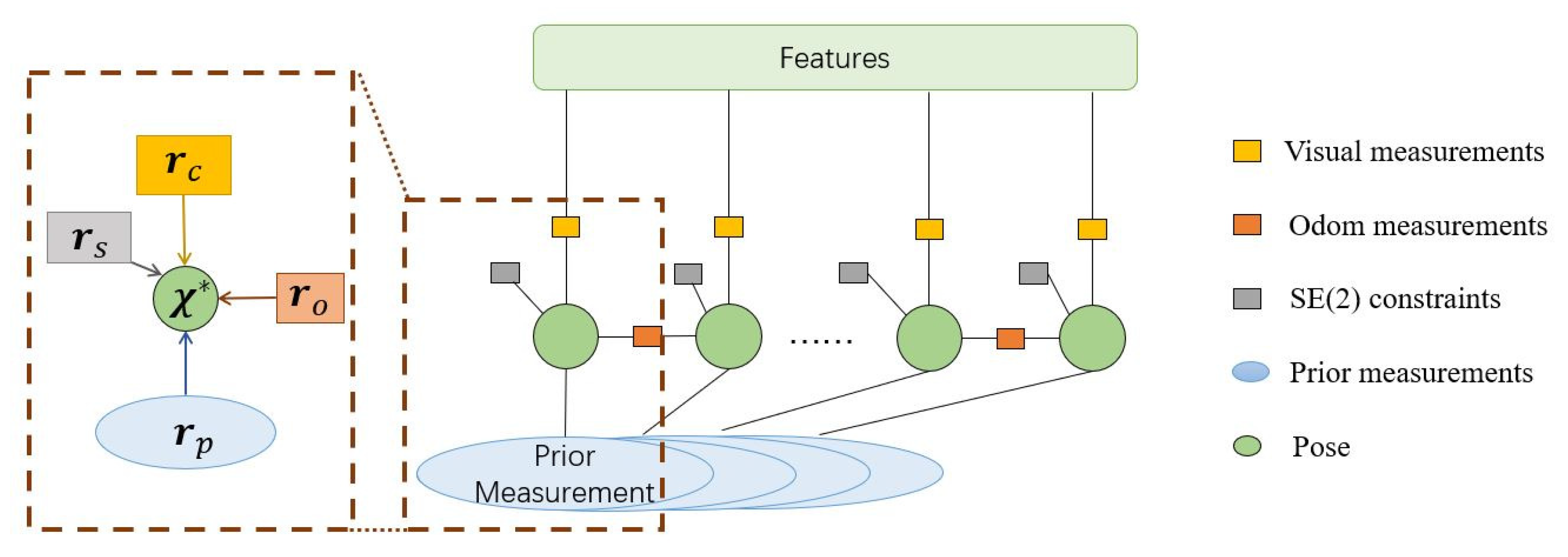
3.3. Tightly-Coupled Optimization Based on SE (2) Plane Constraints
4. Simulation and Real-Site Experiment Results
4.1. Simulations and Comparisons
- 1.
- Calibration accuracy test of extrinsic parameters;
- 2.
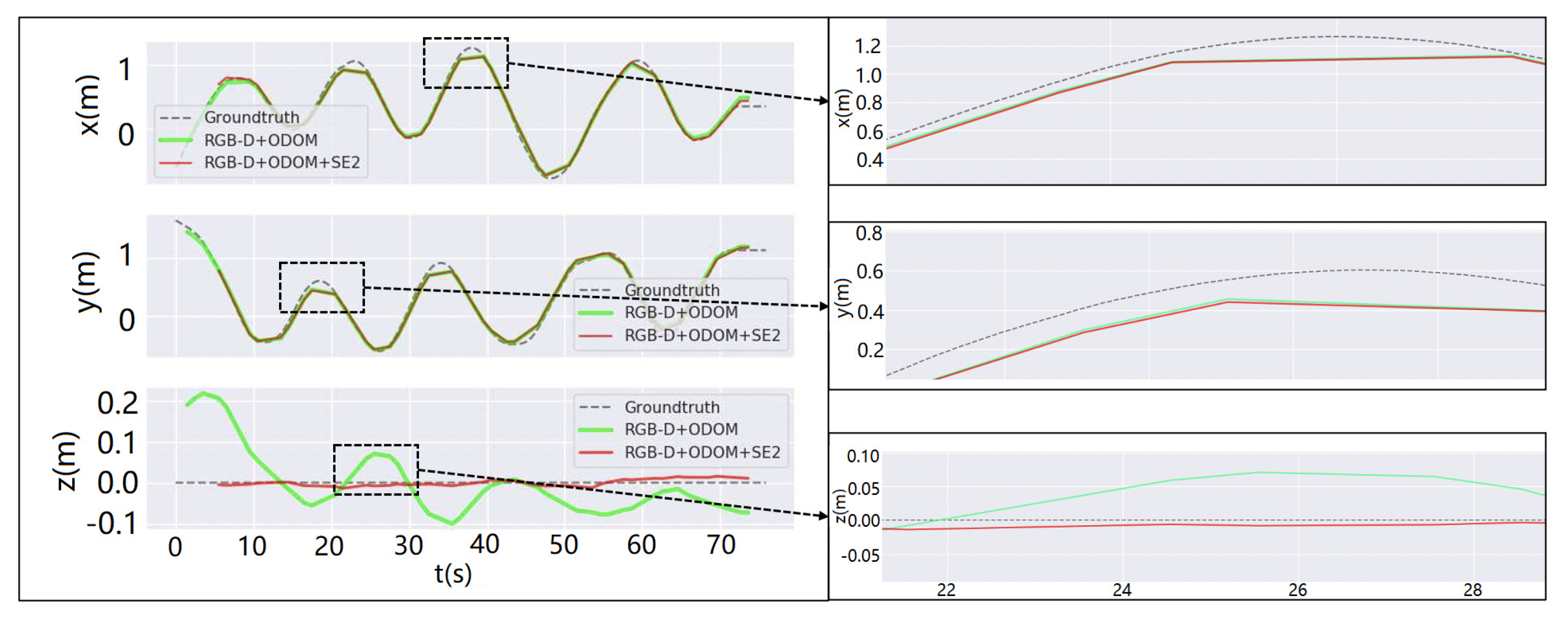
- Positioning accuracy comparison of the fusion positioning system with and without the plane SE(2) constraints;
- 3.
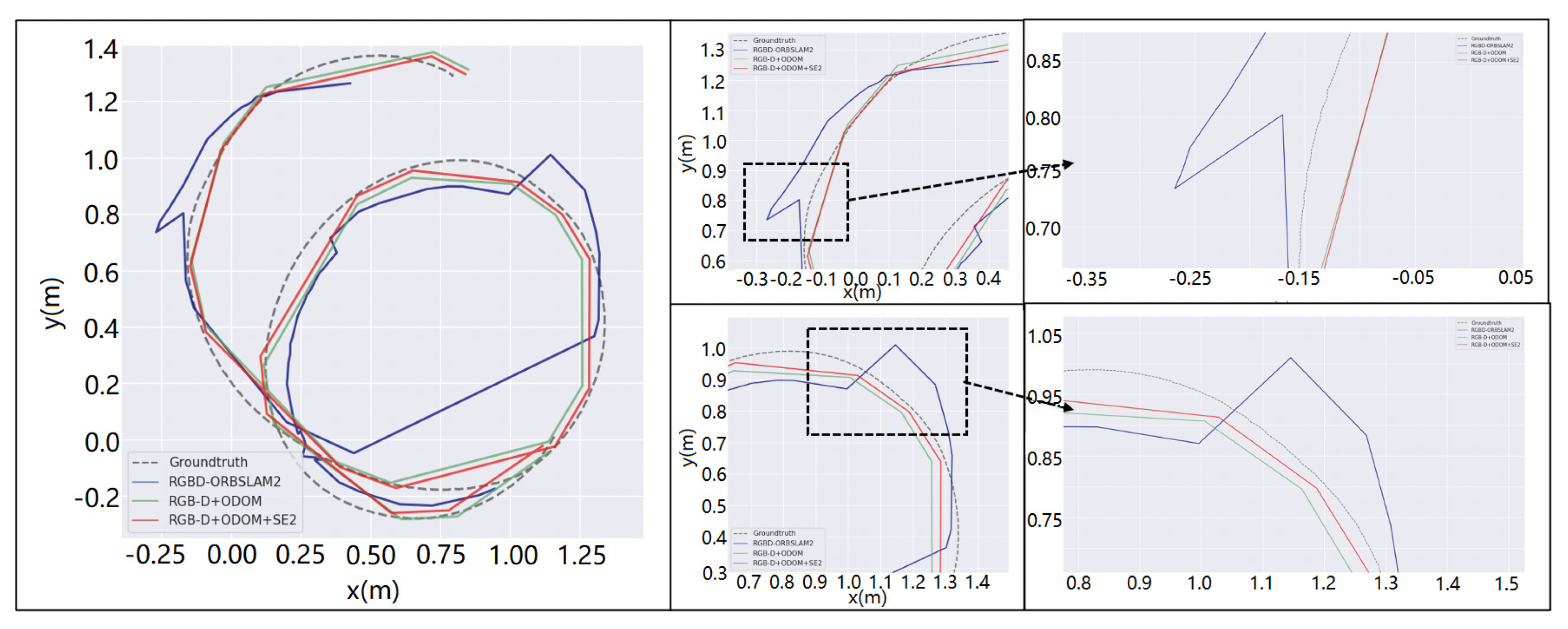
- Positioning accuracy comparison of the fusion positioning system we proposed and RGB-D ORB-SLAM2.
4.1.1. Calibration Accuracy Test of Extrinsic Parameters
4.1.2. Positioning Accuracy Comparison
4.1.3. Comparison of Results with SE(2) Plane Constraints
4.1.4. Comprehensive Comparison of Positioning Accuracy
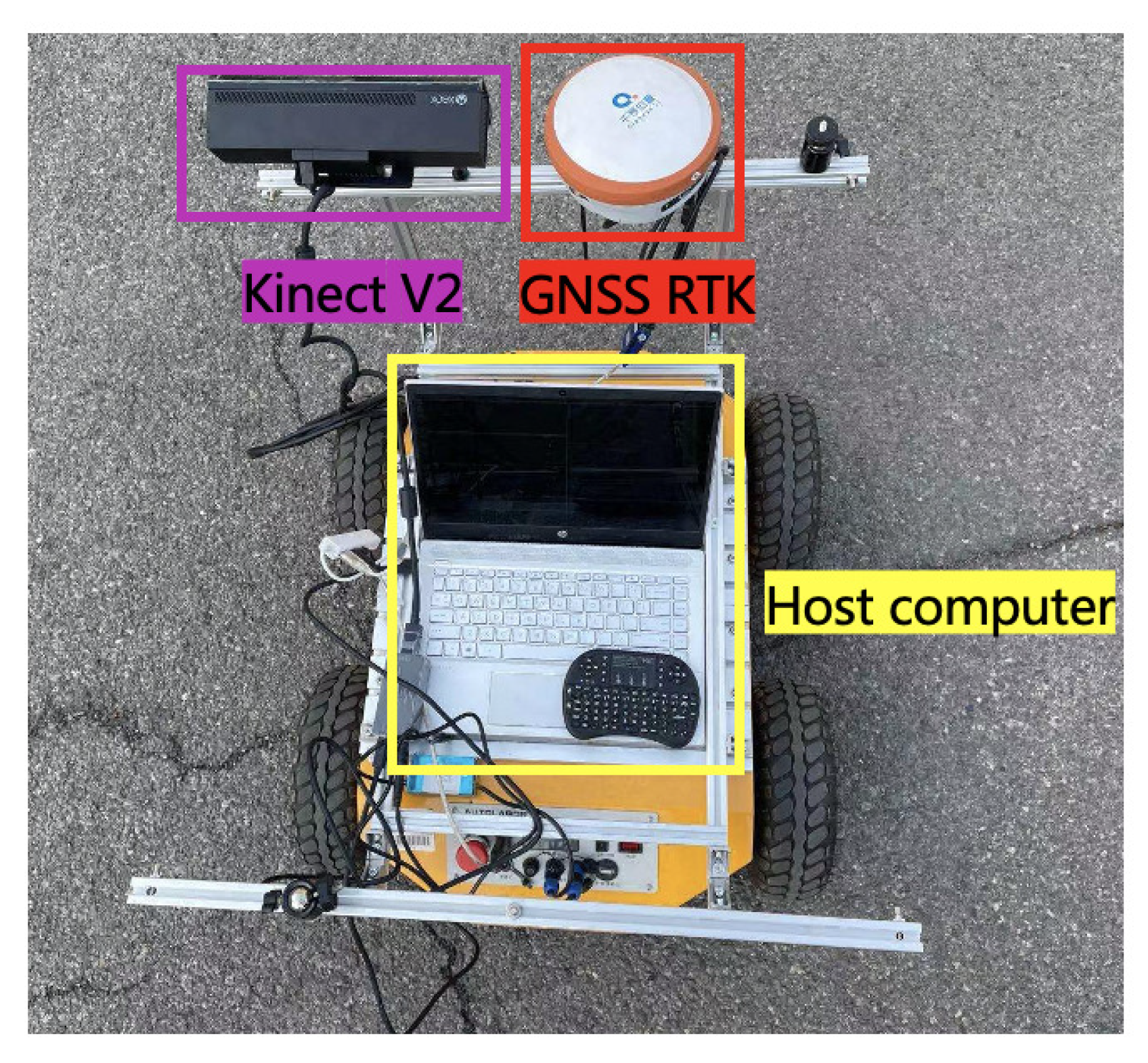
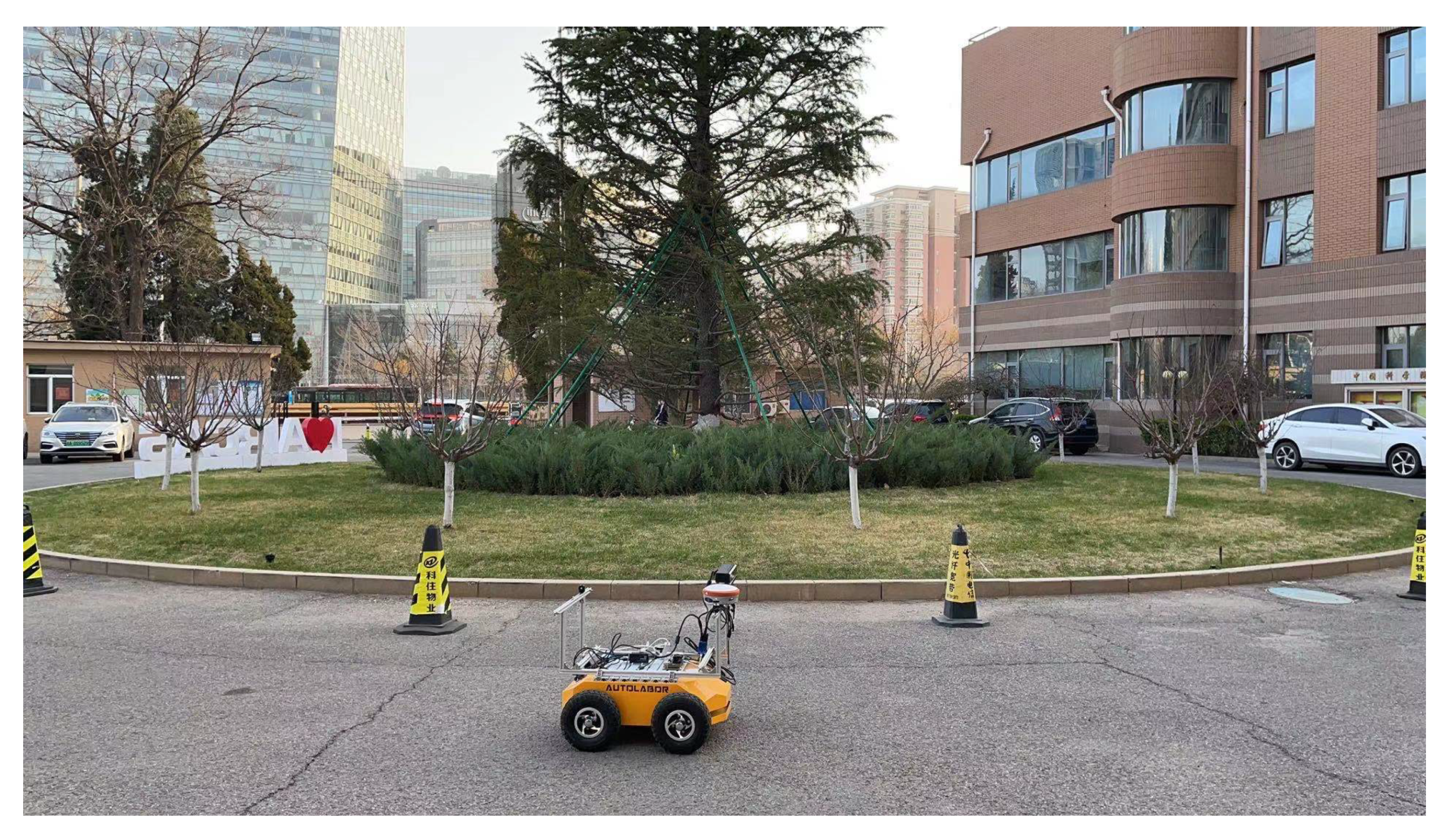
4.2. Experiments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Marchel, Ł.; Naus, K.; Specht, M. Optimisation of the Position of Navigational Aids for the Purposes of SLAM technology for Accuracy of Vessel Positioning. J. Navig. 2020, 73, 282–295. [Google Scholar] [CrossRef] [Green Version]
- Peng, J.; Zhang, P.; Zheng, L.; Tan, J. UAV positioning based on multi-sensor fusion. IEEE Access 2020, 8, 34455–34467. [Google Scholar] [CrossRef]
- Liu, J.; Gong, S.; Guan, W.; Li, B.; Li, H.; Liu, J. Tracking and Localization based on Multi-angle Vision for Underwater Target. Electronics 2020, 9, 1871. [Google Scholar] [CrossRef]
- Xiao, L.; Wang, J.; Qiu, X.; Rong, Z.; Zou, X. Dynamic-SLAM: Semantic monocular visual localization and mapping based on deep learning in dynamic environment. Robot. Auton. Syst. 2019, 117, 1–16. [Google Scholar] [CrossRef]
- Hu, X.; Luo, Z.; Jiang, W. AGV Localization System Based on Ultra-Wideband and Vision Guidance. Electronics 2020, 9, 448. [Google Scholar] [CrossRef] [Green Version]
- Poulose, A.; Han, D.S. Hybrid Deep Learning Model Based Indoor Positioning Using Wi-Fi RSSI Heat Maps for Autonomous Applications. Electronics 2020, 10, 2. [Google Scholar] [CrossRef]
- Jeon, D.; Choi, H. Multi-sensor fusion for vehicle localization in real environment. In Proceedings of the IEEE 2015 15th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2015; pp. 411–415. [Google Scholar]
- Wu, K.J.; Guo, C.X.; Georgiou, G.; Roumeliotis, S.I. Vins on wheels. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5155–5162. [Google Scholar]
- Wang, W.; Xie, G. Online High-Precision Probabilistic Localization of Robotic Fish Using Visual and Inertial Cues. Ind. Electron. IEEE Trans. 2015, 62, 1113–1124. [Google Scholar] [CrossRef]
- Shen, J.; Tick, D.; Gans, N. Localization through fusion of discrete and continuous epipolar geometry with wheel and IMU odometry. In Proceedings of the IEEE 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 1292–1298. [Google Scholar]
- Newcombe, R.A.; Izadi, S.; Hilliges, O.; Molyneaux, D.; Kim, D.; Davison, A.J.; Fitzgibbon, A. Kinectfusion: Real-time dense surface mapping and tracking. In Proceedings of the 2011 10th IEEE International Symposium on Mixed and Augmented Reality, Basel, Switzerland, 26–29 October 2011; pp. 127–136. [Google Scholar]
- Labbé, M.; Michaud, F. RTAB-Map as an open-source lidar and visual simultaneous localization and mapping library for large-scale and long-term online operation. J. Field Robot. 2019, 36, 416–446. [Google Scholar] [CrossRef]
- Ligocki, A.; Jelínek, A. Fusing the RGBD SLAM with Wheel Odometry. IFAC-PapersOnLine 2019, 52, 7–12. [Google Scholar] [CrossRef]
- Gao, E.; Chen, Z.; Gao, Q. Particle Filter Based Robot Self-localization Using RGBD Cues and Wheel Odometry Measurements. In Proceedings of the 6th International Conference on Electronic, Mechanical, Information and Management Society, Shenyang, China, 1–3 April 2016; Atlantis Press: Paris, France, 2016. [Google Scholar]
- Qin, T.; Li, P.; Shen, S. Vins-mono: A robust and versatile monocular visual-inertial state estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]
- Zhao, S.; Chen, Y.; Farrell, J.A. High-precision vehicle navigation in urban environments using an MEM’s IMU and single-frequency GPS receiver. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2854–2867. [Google Scholar] [CrossRef]
- Yin, B.; Wei, Z.; Zhuang, X. Robust mobile robot localization using a evolutionary particle filter. In Proceedings of the International Conference on Computational and Information Science, Atlanta, GA, USA, 22–25 May 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 279–284. [Google Scholar]
- Zheng, F.; Liu, Y.H. SE (2)-constrained visual inertial fusion for ground vehicles. IEEE Sens. J. 2018, 18, 9699–9707. [Google Scholar] [CrossRef]
- Zheng, F.; Tang, H.; Liu, Y.H. Odometry-vision-based ground vehicle motion estimation with se (2)-constrained se (3) poses. IEEE Trans. Cybern. 2018, 49, 2652–2663. [Google Scholar] [CrossRef] [PubMed]
- Antonelli, G.; Caccavale, F.; Grossi, F.; Marino, A. Simultaneous calibration of odometry and camera for a differential drive mobile robot. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 5417–5422. [Google Scholar]
- Tang, H.; Liu, Y. A fully automatic calibration algorithm for a camera odometry system. IEEE Sens. J. 2017, 17, 4208–4216. [Google Scholar] [CrossRef]
- Wang, X.; Chen, H.; Li, Y.; Huang, H. Online extrinsic parameter calibration for robotic camera—Encoder system. IEEE Trans. Ind. Inform. 2019, 15, 4646–4655. [Google Scholar] [CrossRef]
- Yang, D.; Bi, S.; Wang, W.; Yuan, C.; Qi, X.; Cai, Y. DRE-SLAM: Dynamic RGB-D encoder SLAM for a differential-drive robot. Remote Sens. 2019, 11, 380. [Google Scholar] [CrossRef] [Green Version]
- Barfoot, T.D. State Estimation for Robotics: A Matrix Lie Group Approach; Draft in Preparation for Publication by Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Varadarajan, V.S. Lie Groups, Lie Algebras, and Their Representations; Springer Science & Business Media: New York, NY, USA, 2013. [Google Scholar]
- Shi, J. Good features to track. In Proceedings of the 1994 IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Andrew, A.M. Multiple view geometry in computer vision. Kybernetes 2001. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Chai, Z.; Liu, X.; Li, Z.; Luo, H.; Zhao, F. Tightly-coupled Vision-Gyro-Wheel Odometry for Ground Vehicle with Online Extrinsic Calibration. In Proceedings of the IEEE 2020 3rd International Conference on Intelligent Autonomous Systems (ICoIAS), Singapore, 26–29 February 2020; pp. 99–106. [Google Scholar]
- Guo, C.X.; Mirzaei, F.M.; Roumeliotis, S.I. An analytical least-squares solution to the odometer-camera extrinsic calibration problem. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St. Paul, MN, USA, 14–18 May 2012; pp. 3962–3968. [Google Scholar]
- Huber, P.J. Robust estimation of a location parameter. In Breakthroughs in Statistics; Springer: New York, NY, USA, 1992; pp. 492–518. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Vancouver, BC, Canada, 12–13 May 2009; Volume 3, p. 5. [Google Scholar]
- Ceres Solver. Available online: http://ceres-solver.org (accessed on 4 April 2021).
- Evo. Available online: https://github.com/MichaelGrupp/evo.git (accessed on 16 April 2021).
- Mur-Artal, R.; Tardós, J.D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets Number | ORB-SLAM2 | RGB-D+Odom (with SE2) | Improvement (ORBSLAM2/RGB-D+Odom) |
|---|---|---|---|
| O-HD1 | 0.119 | 0.086 | 27.7% |
| O-HD2 | X | 0.094 | X |
| O-HD3 | 0.128 | 0.069 | 46.1% |
| O-LD1 | 0.108 | 0.065 | 39.8% |
| O-LD2 | 0.146 | 0.101 | 30.8% |
| O-LD3 | 0.201 | 0.139 | 30.8% |
| Datasets Number | RGB-D+Odom (without SE2) | RGB-D+Odom (with SE2) | Improvements (without SE2/with SE2) |
|---|---|---|---|
| O-HD1 | 0.092 | 0.086 | 6.5% |
| O-HD2 | 0.120 | 0.094 | 21.7% |
| O-HD3 | 0.112 | 0.069 | 38.4% |
| O-LD1 | 0.113 | 0.065 | 42.5% |
| O-LD2 | 0.115 | 0.101 | 9.6% |
| O-LD3 | 0.154 | 0.139 | 9.7% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, L.; Wang, Y.; Liu, Y.; Zhang, H.; Zheng, S.; Zou, X.; Li, Z. A Tightly-Coupled Positioning System of Online Calibrated RGB-D Camera and Wheel Odometry Based on SE(2) Plane Constraints. Electronics 2021, 10, 970. https://doi.org/10.3390/electronics10080970
Zhou L, Wang Y, Liu Y, Zhang H, Zheng S, Zou X, Li Z. A Tightly-Coupled Positioning System of Online Calibrated RGB-D Camera and Wheel Odometry Based on SE(2) Plane Constraints. Electronics. 2021; 10(8):970. https://doi.org/10.3390/electronics10080970
Chicago/Turabian StyleZhou, Liling, Yingzi Wang, Yunfei Liu, Haifeng Zhang, Shuaikang Zheng, Xudong Zou, and Zhitian Li. 2021. "A Tightly-Coupled Positioning System of Online Calibrated RGB-D Camera and Wheel Odometry Based on SE(2) Plane Constraints" Electronics 10, no. 8: 970. https://doi.org/10.3390/electronics10080970
APA StyleZhou, L., Wang, Y., Liu, Y., Zhang, H., Zheng, S., Zou, X., & Li, Z. (2021). A Tightly-Coupled Positioning System of Online Calibrated RGB-D Camera and Wheel Odometry Based on SE(2) Plane Constraints. Electronics, 10(8), 970. https://doi.org/10.3390/electronics10080970